
Research on Multilevel Filtering Algorithm Used for Denoising Strong and Weak Beams of Daytime Photon Cloud Data with High Background Noise

Abstract
:
1. Introduction
2. Materials and Methods
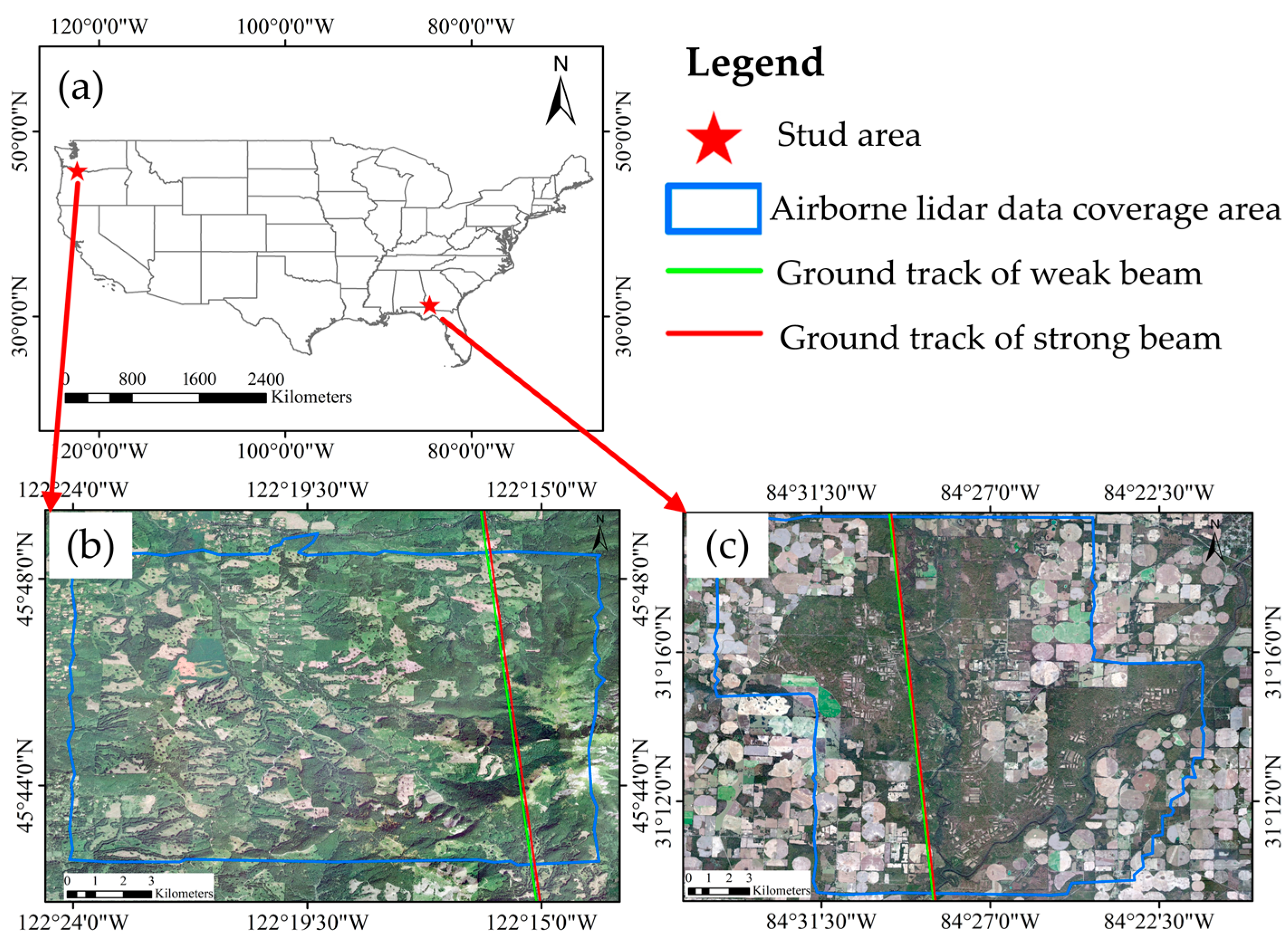
2.1. Study Area
2.2. Data
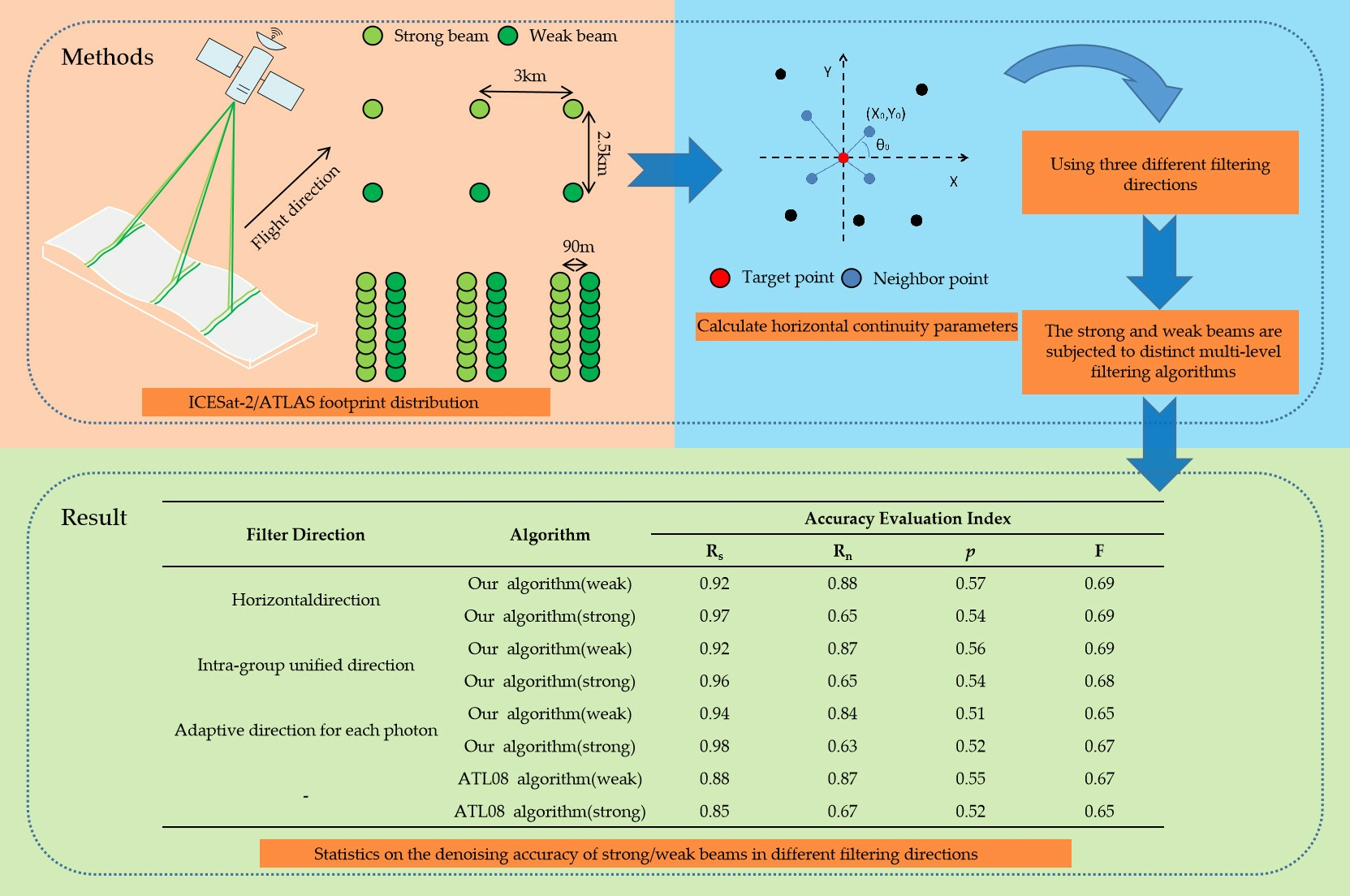
2.2.1. ICESat-2/ATLAS Data
2.2.2. Airborne LiDAR Data
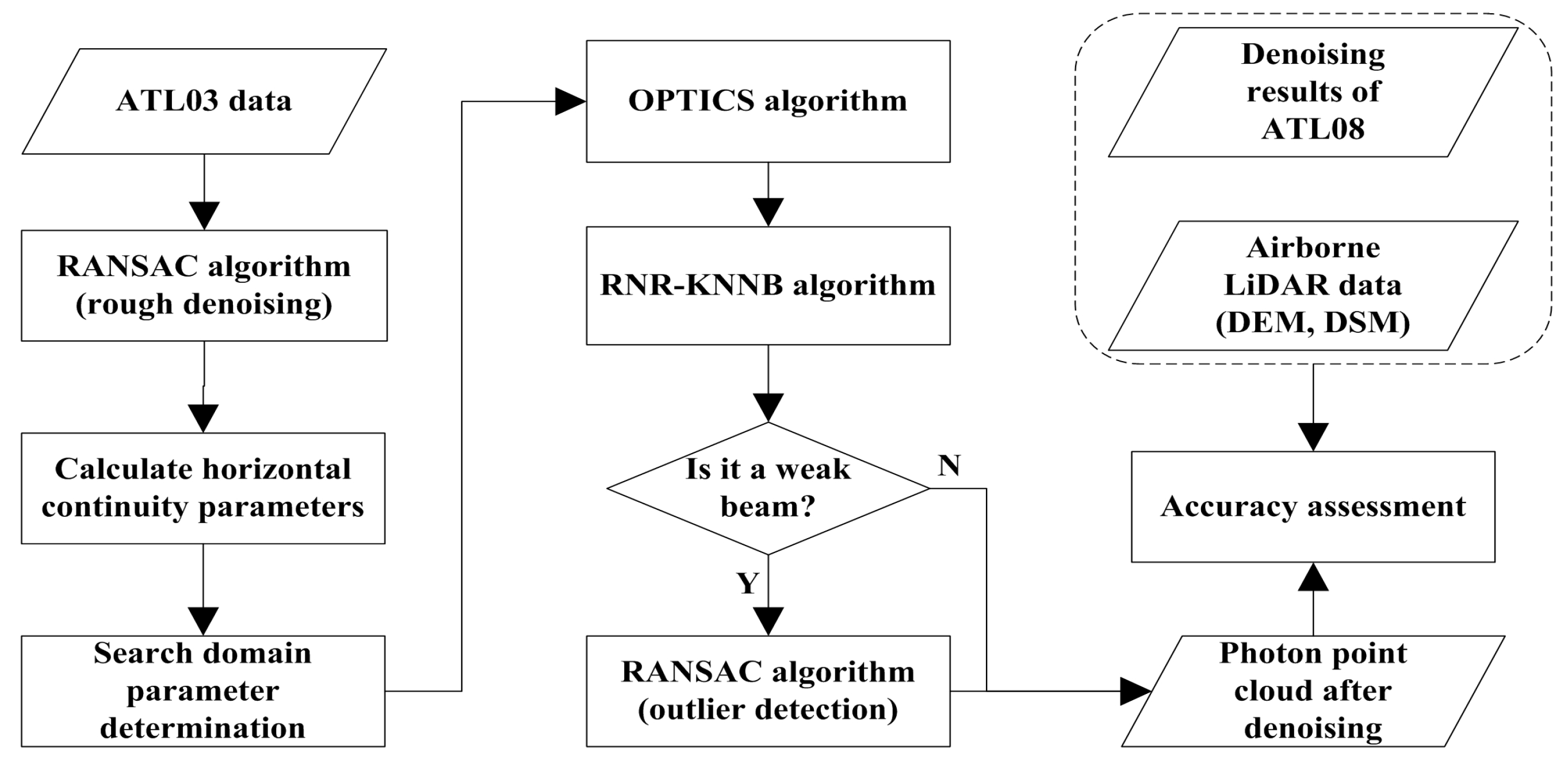
2.3. Methods
2.3.1. Rough Denoising
- (1)
- The data are divided into windows using the method of equal along-track distance. The photon cloud data are converted into the form of “along-track distance—elevation” and are divided according to the orbital distance interval of 100 m.
- (2)
- The initialization model is determined, which in this study is a three-parameter curve fitting model, whose equation is shown in Formula (1). Then, three non-repeating points are randomly selected from each window as a subset, and the subsets are used to fit the model in order to obtain the required parameters of the model.
- (3)
- The inner point and outer point are divided. The obtained model is then employed in order to check all points. The checking method involves calculating the distance between all points and the vertical direction of the model. When the distance is less than the set threshold, it is marked as an inner point and its number is recorded; otherwise, it is marked as an outer point.
- (4)
- Updates are made to the optimal model parameters and the corresponding number of the interior points.
- (5)
- The optimal model is determined. Steps (1) to (4) are then repeated until the maximum number of iterations has been reached. The number of interior points obtained by each model is counted, and the model with the largest number of interior points is recorded as the optimal model and output.
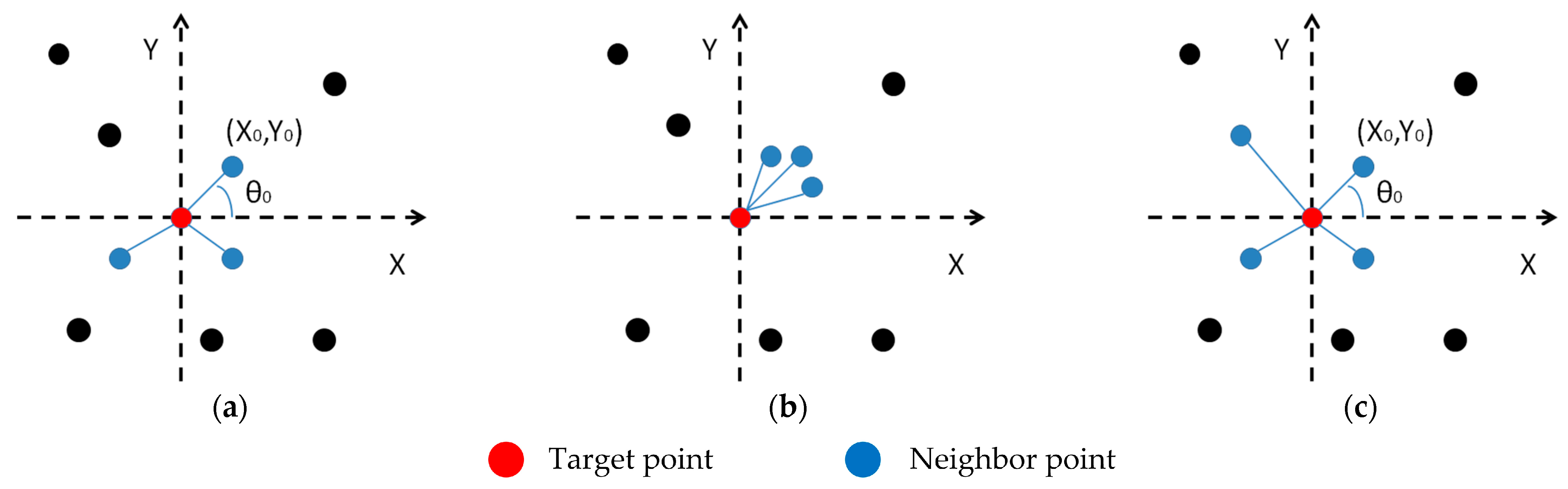
2.3.2. Fine Denoising
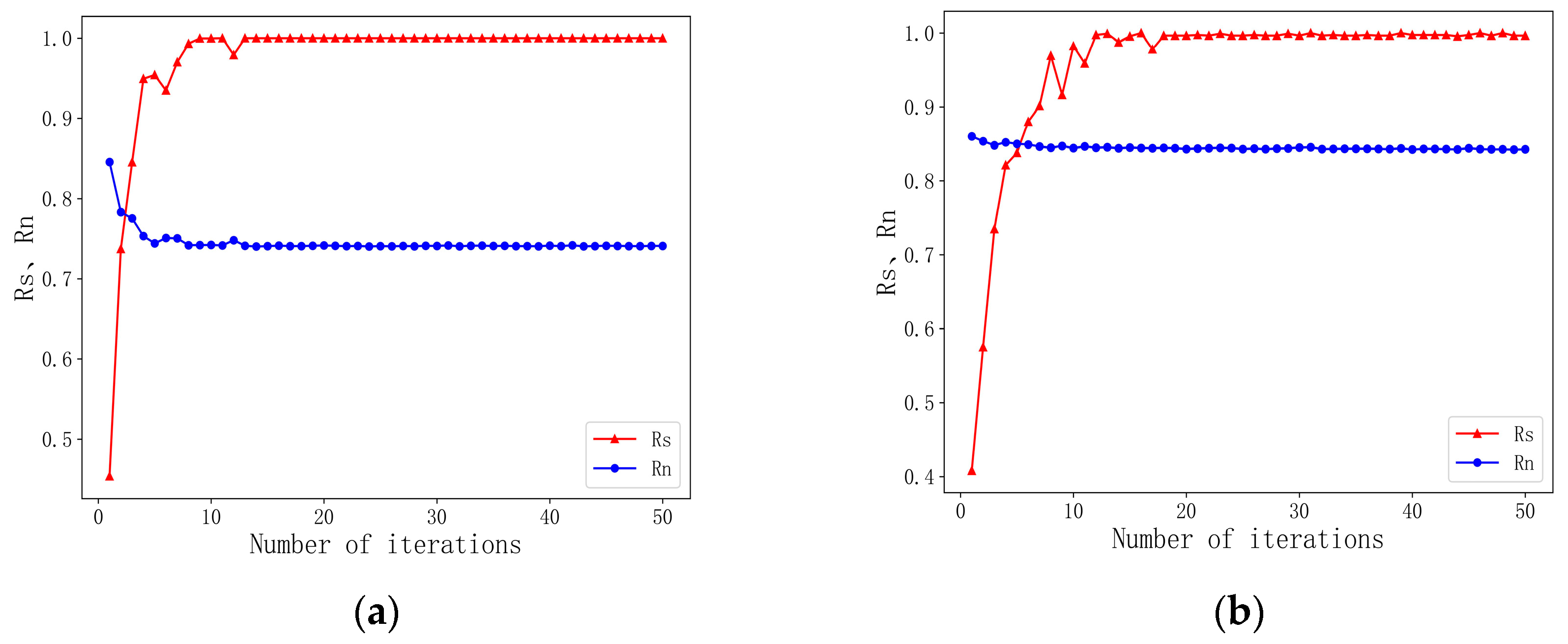
2.4. Accuracy Evaluation
3. Results
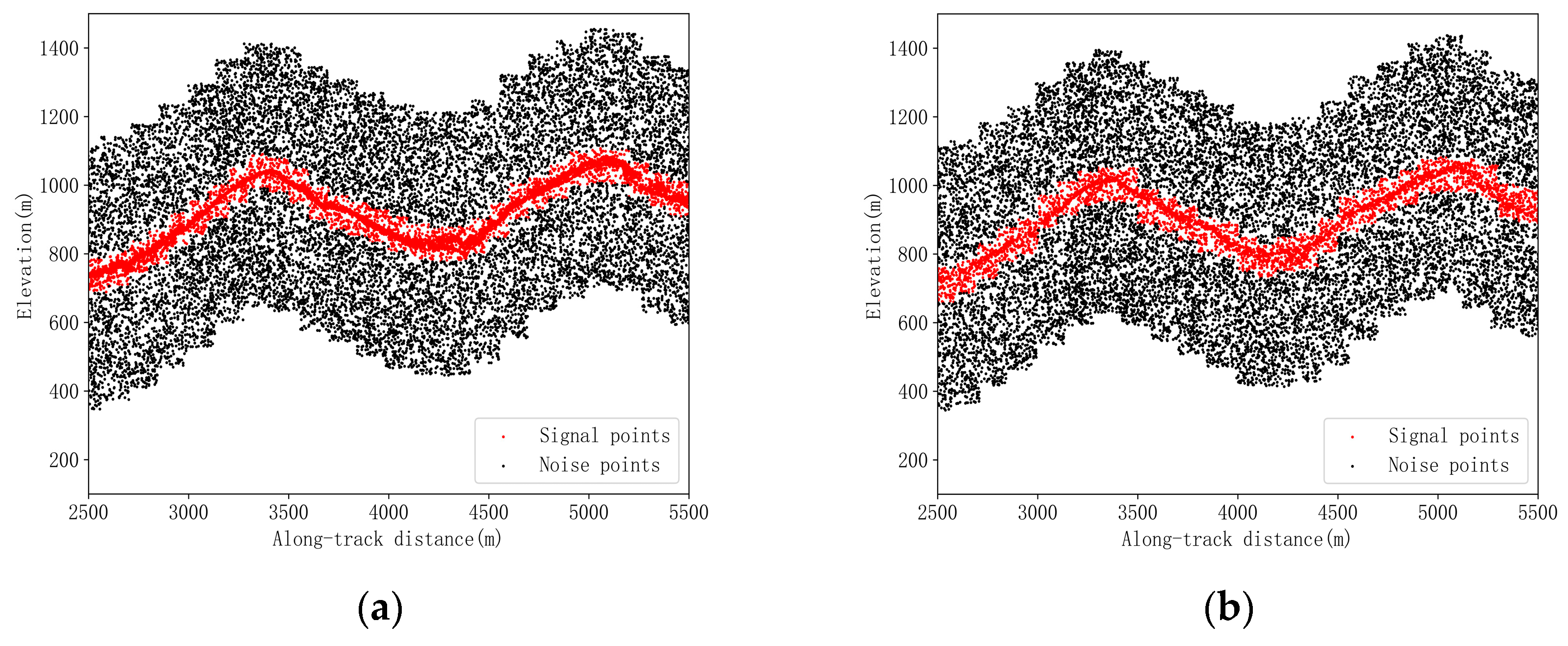
3.1. Rough Denoising Results of the Daytime Strong and Weak Beam Photon Cloud Data
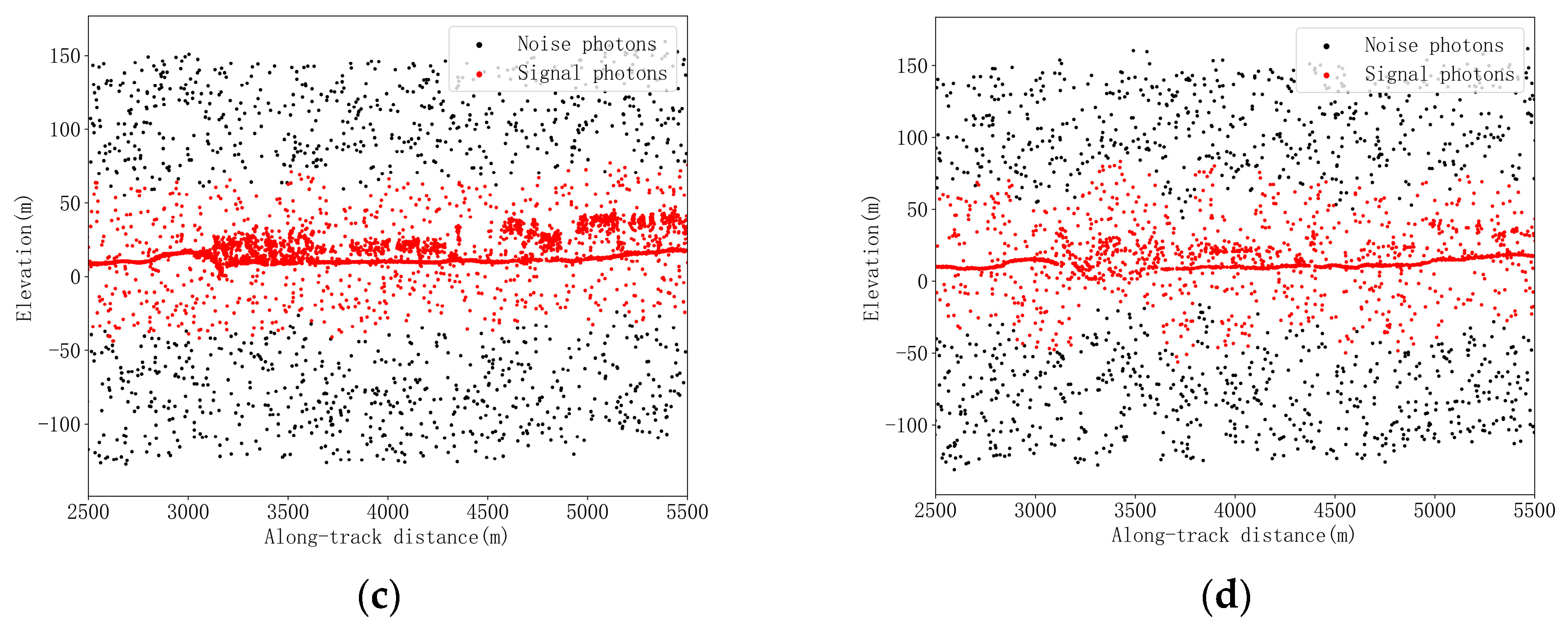
3.2. Fine Denoising Results of the Daytime Strong and Weak Beam Photon Cloud Data
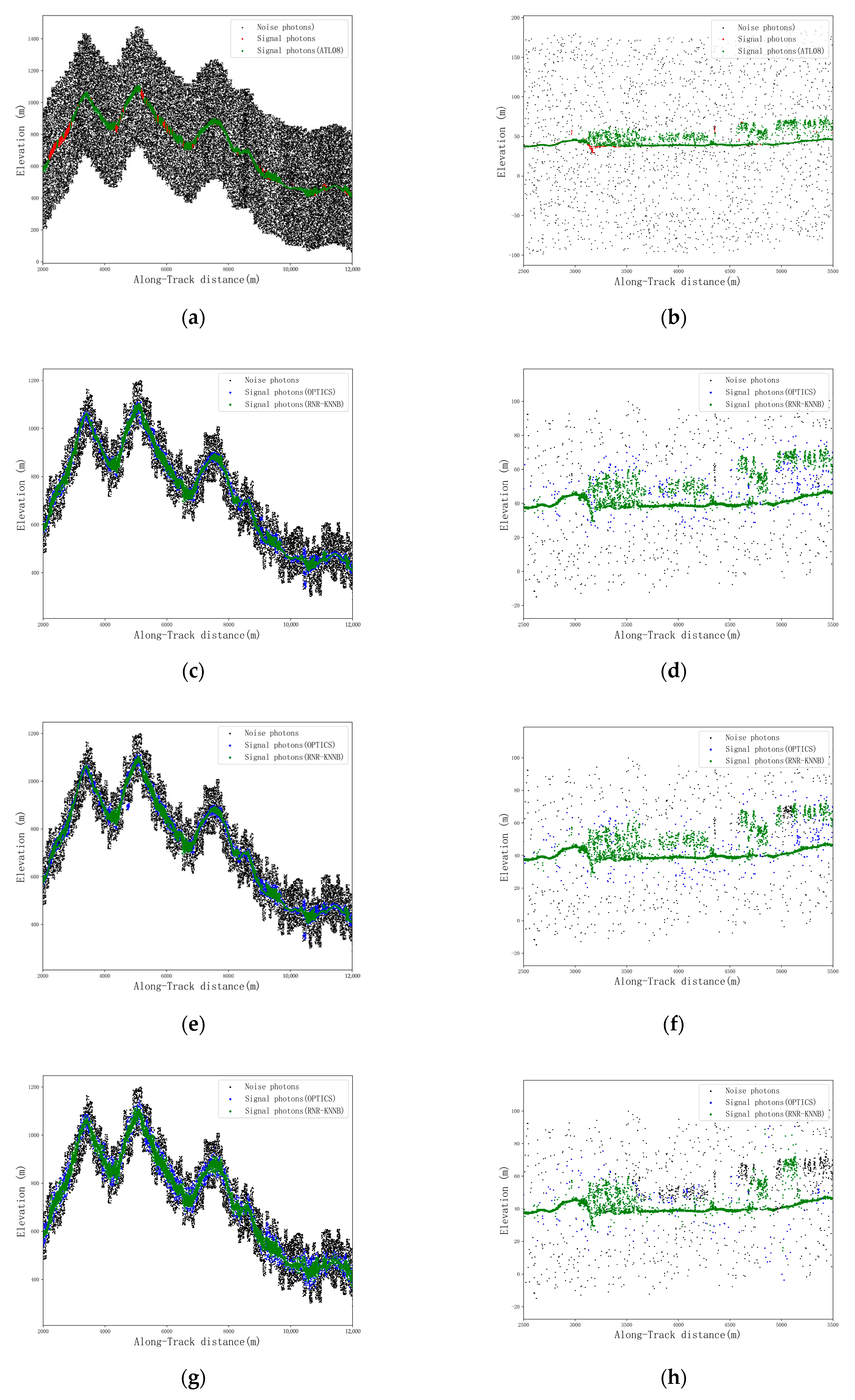
3.2.1. Fine Denoising Results of Strong Beam Photon Cloud Data
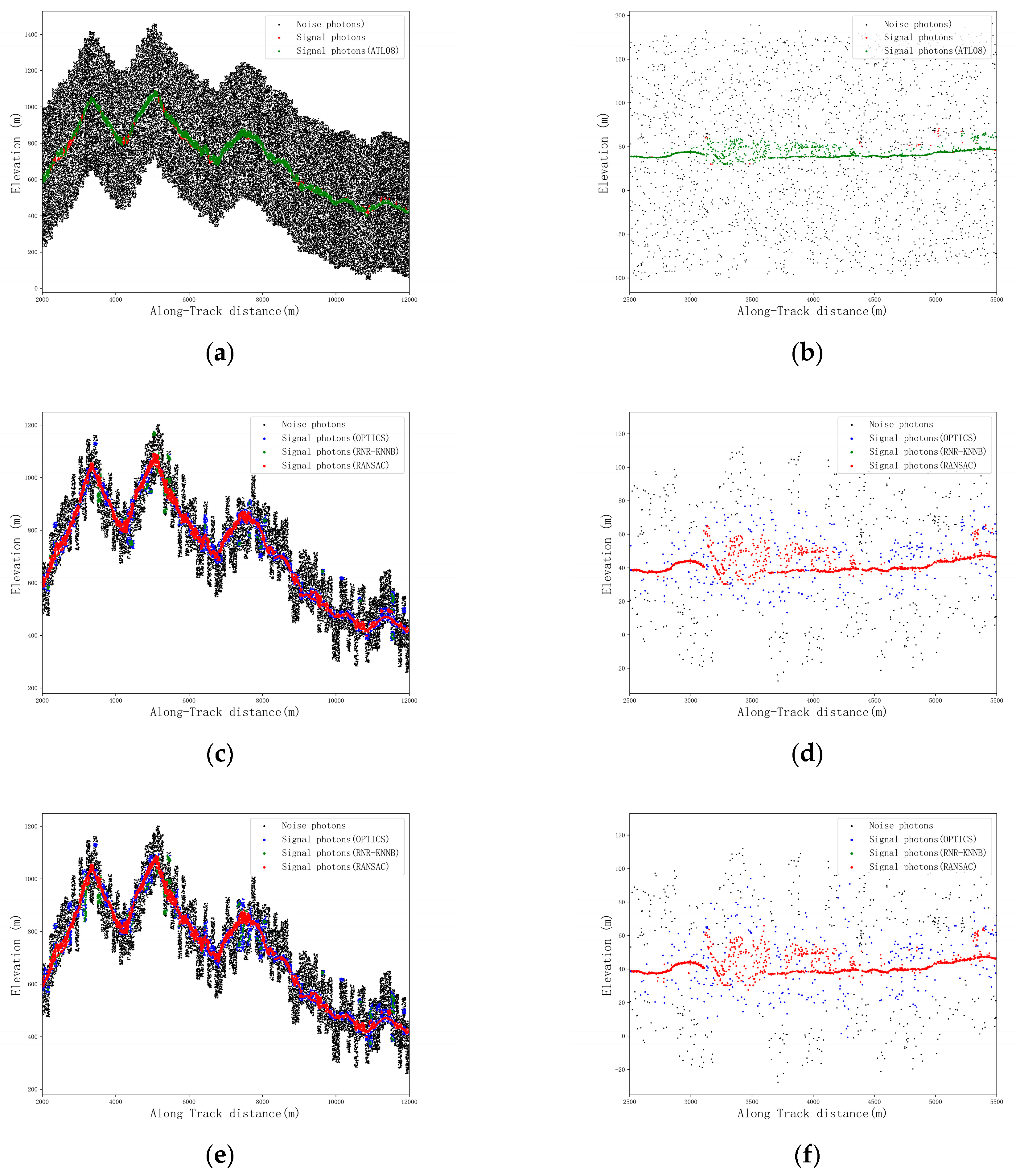
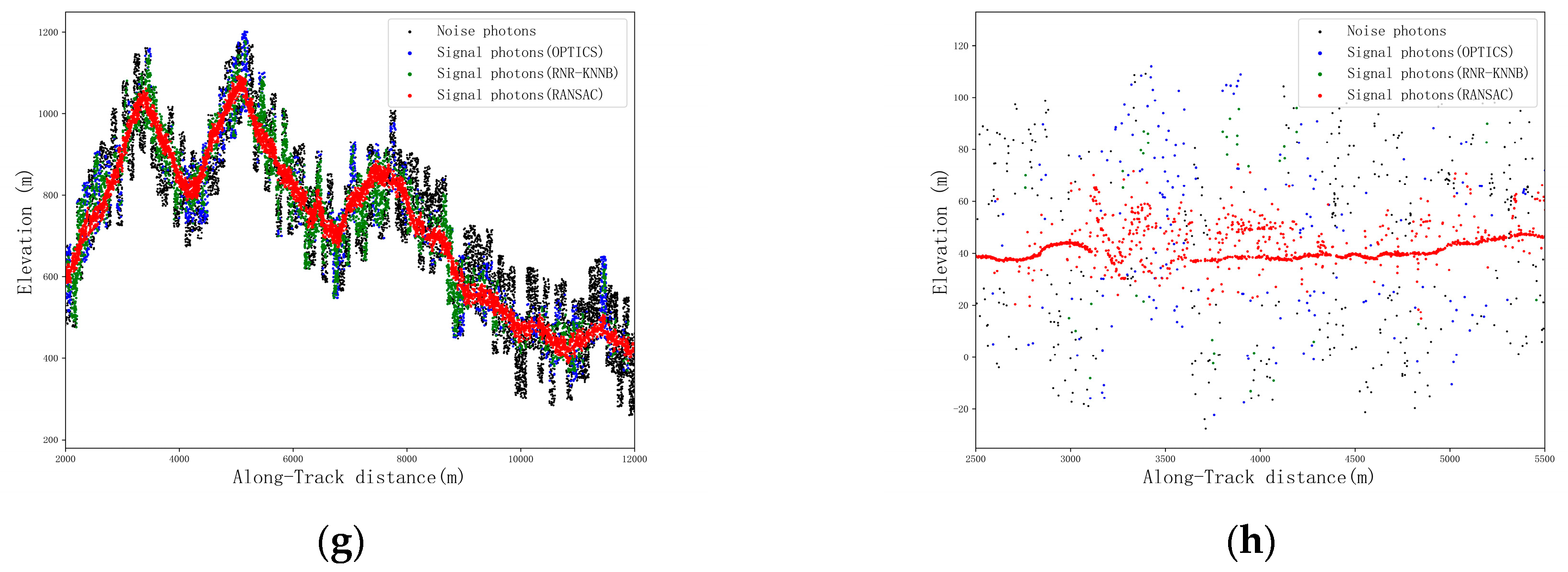
3.2.2. Fine Denoising Results of Weak Beam Photon Cloud Data
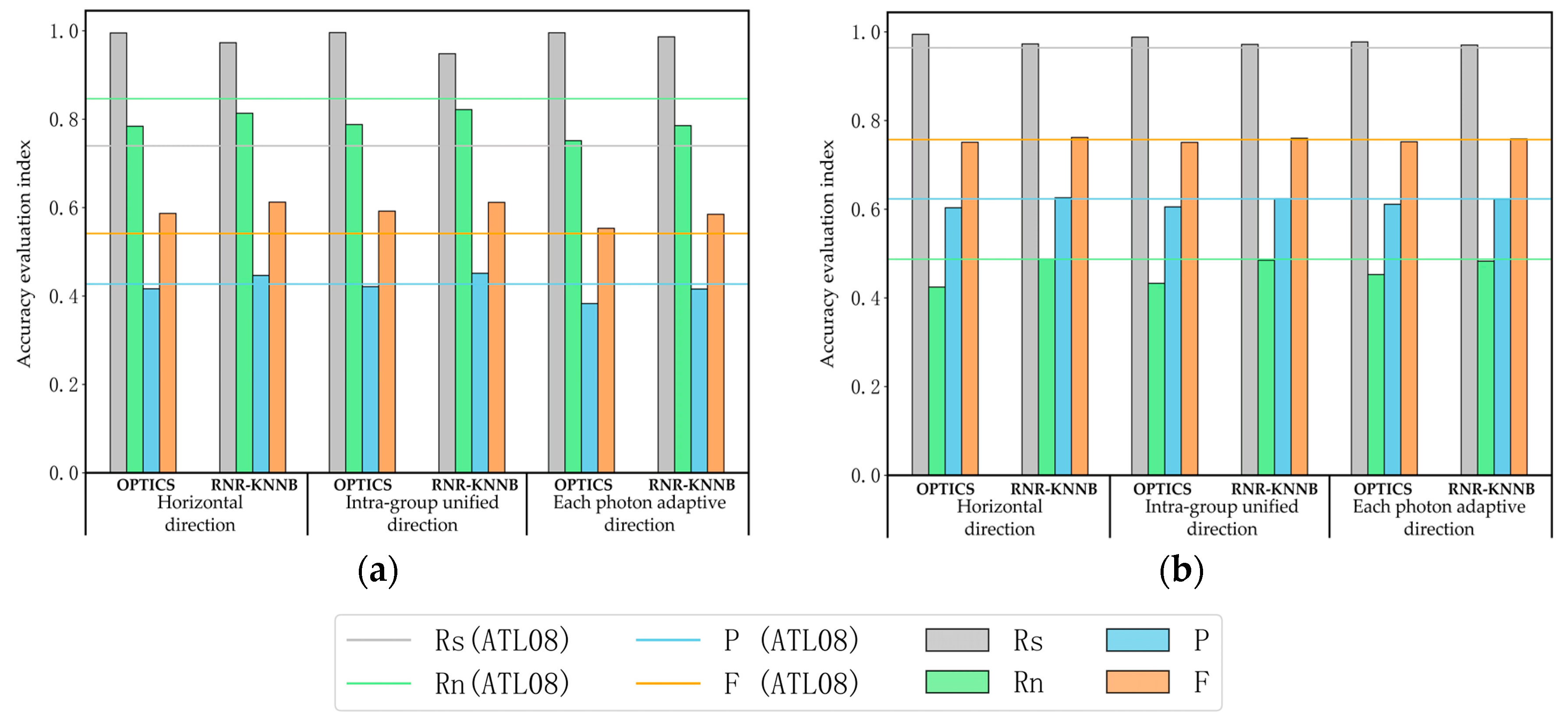
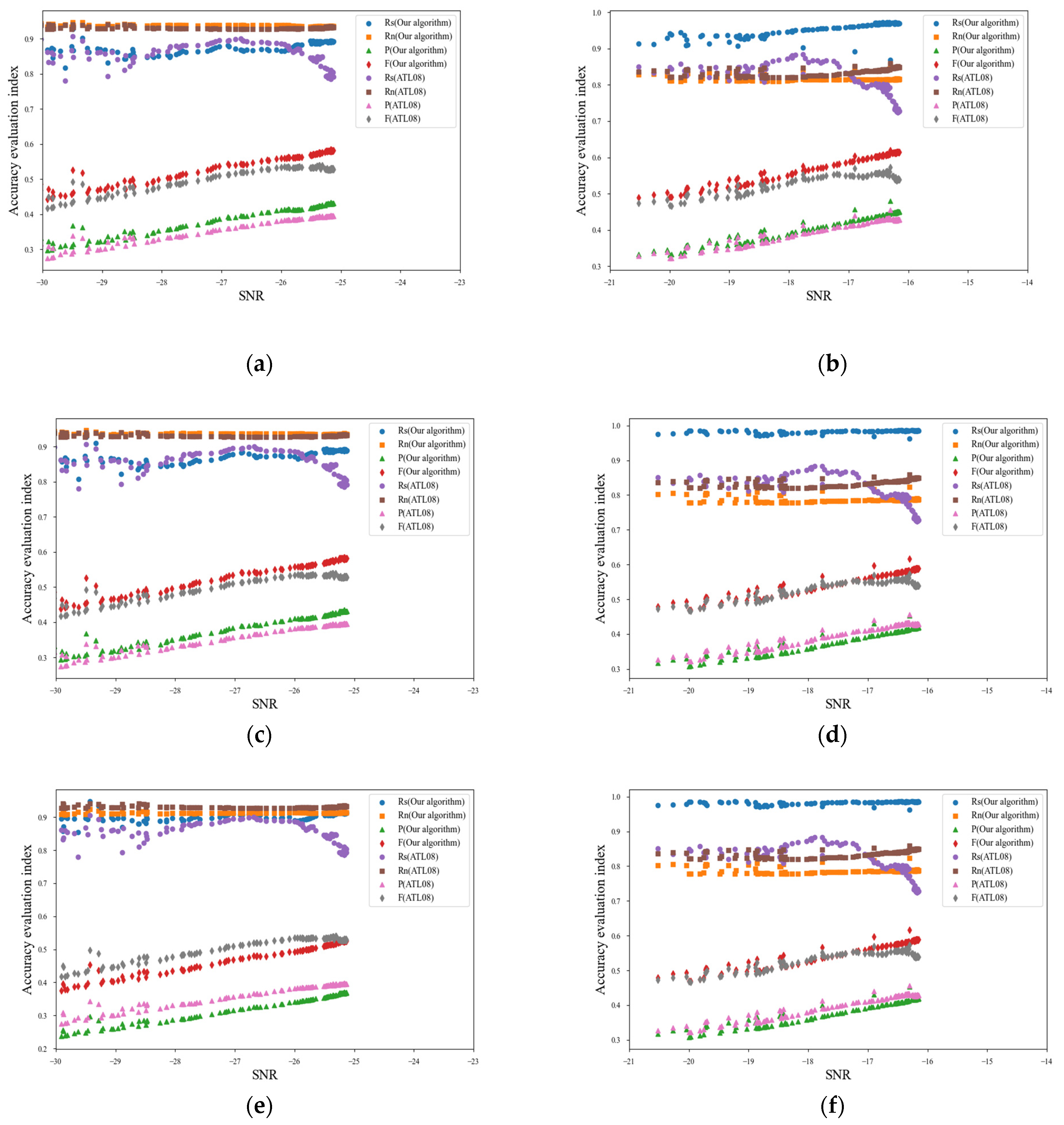
3.3. Denoising Results of Strong and Weak Beam Photon Cloud Data in Different Directions and SNRs
4. Discussion
4.1. Analysis of Denoising Results in Different Beam Intensities
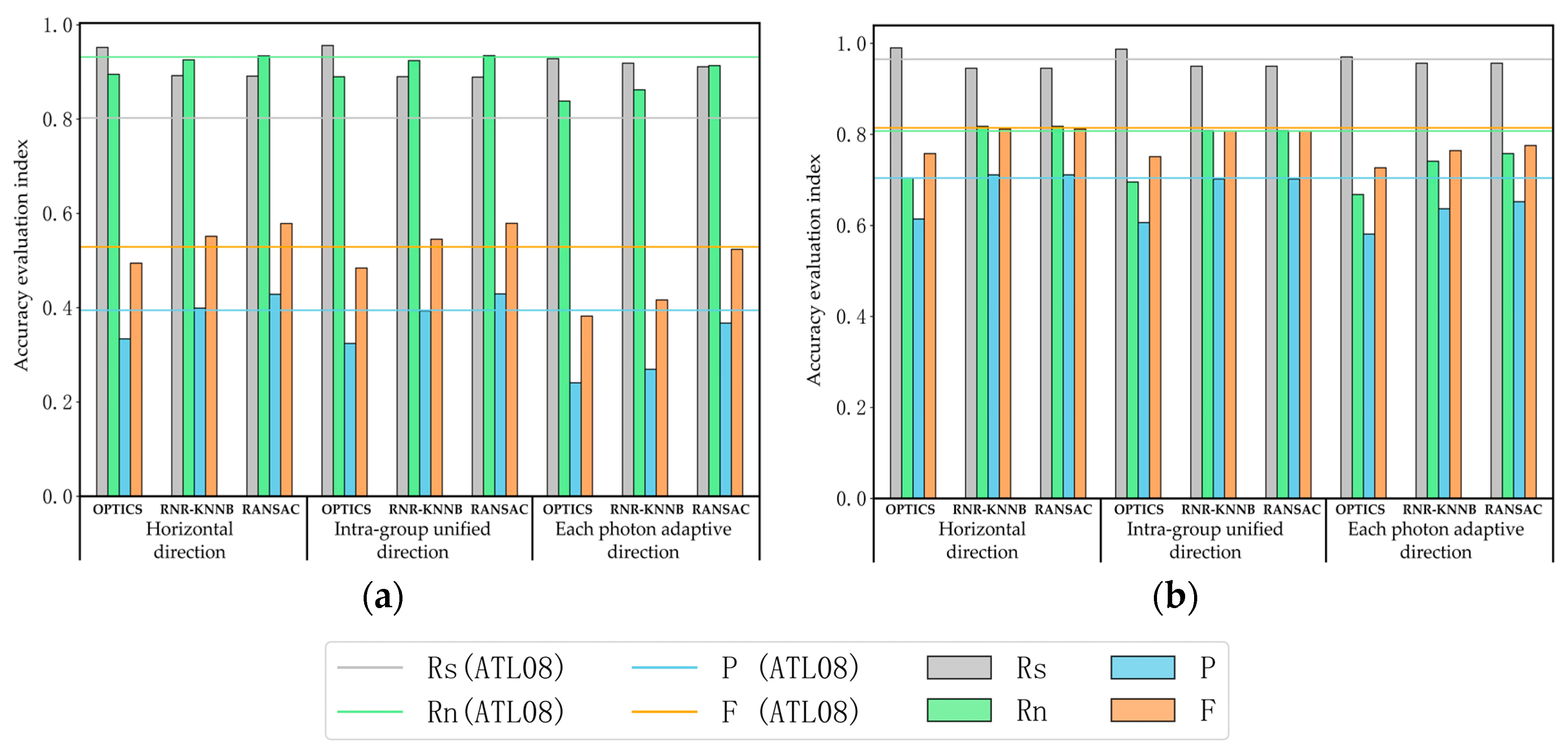
4.2. Analysis of Denoising Results in Different Filtering Directions
5. Conclusions
- (1)
- The multilevel filtering algorithm proposed in this study is capable of achieving the precise denoising of the ICESat-2/ATLAS daytime photon cloud data, and its overall accuracy and adaptability are also superior to those of the ATL08 algorithm.
- (2)
- In the case of the daytime strong beam, the multilevel filtering algorithm in the three filtering directions proposed in this study is capable of achieving more accurate denoising results, and the denoising accuracy is much higher than that of the ATL08 algorithm. Furthermore, the filtering direction does not exhibit any obvious impact on the denoising results of the multilevel filtering algorithm.
- (3)
- In the case of the daytime weak beam, the accuracy of the denoising results obtained through the multilevel filtering algorithm in the horizontal direction and the intra-group unified direction is similar and superior to the denoising results of the multilevel filtering algorithm in adaptive directions for each photon as well as the ATL08 algorithm. Therefore, in future relevant research, it is not recommended to use the multilevel filtering algorithm with adaptive directions for each photon in order to denoise the ICESat-2/ATLAS daytime weak beam photon cloud data.
- (4)
- SNR is an important factor affecting the denoising results of algorithms. The higher the SNR, the better the data quality, and denoising algorithms can also achieve better denoising results. For strong and weak beams, the p-value and F-value of the denoising results of multilevel filtering algorithms in three different filtering directions increase with the increase of SNR value.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Wang, J.; Li, D.; Zhou, H. A noise removal algorithm based on OPTICS for photon-counting LiDAR data. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1471–1475. [Google Scholar] [CrossRef]
- Ranson, K.J.; Sun, G.; Kovacs, K.; Kharuk, V.I. Landcover attributes from ICESat GLAS data in central Siberia. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 753–756. [Google Scholar]
- Wang, Y.; Ni, W.; Sun, G.; Chi, H.; Zhang, Z.; Guo, Z. Slope-adaptive waveform metrics of large footprint lidar for estimation of forest aboveground biomass. Remote Sens. Environ. 2019, 224, 386–400. [Google Scholar] [CrossRef]
- Pitkänen, T.P.; Raumonen, P.; Kangas, A. Measuring stem diameters with TLS in boreal forests by complementary fitting procedure. ISPRS J. Photogramm. Remote Sens. 2019, 147, 294–306. [Google Scholar] [CrossRef]
- Vernimmen, R.; Hooijer, A.; Pronk, M. New ICESat-2 satellite LiDAR data allow first global lowland DTM suitable for accurate coastal flood risk assessment. Remote Sens. 2020, 12, 2827. [Google Scholar] [CrossRef]
- Xia, S.; Wang, C.; Xi, X.; Luo, S.; Zeng, H. Point cloud filtering and tree height estimation using airborne experiment data of ICESat-2. J. Remote Sens 2014, 18, 1199–1207. [Google Scholar]
- Bincai, C.; Yong, F.; Zhenzhi, J.; Li, G.; Haiyan, H. Implementation and accuracy evaluation of ICESat-2 ATL08 denoising algorithms. Bull. Surv. Mapp. 2020, 25, 25. [Google Scholar]
- Popescu, S.; Zhou, T.; Nelson, R.; Neuenschwander, A.; Sheridan, R.; Narine, L.; Walsh, K. Photon counting LiDAR: An adaptive ground and canopy height retrieval algorithm for ICESat-2 data. Remote Sens. Environ. 2018, 208, 154–170. [Google Scholar] [CrossRef]
- Herzfeld, U.C.; McDonald, B.W.; Wallin, B.F.; Neumann, T.A.; Markus, T.; Brenner, A.; Field, C. Algorithm for detection of ground and canopy cover in micropulse photon-counting lidar altimeter data in preparation for the ICESat-2 mission. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2109–2125. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Tian, X.; Zhang, Z.; Zhang, W. An adaptive directional model for estimating vegetation canopy height using space-borne photon counting laser altimetry data. J. Infrared Millim. Waves 2020, 39, 363–371. [Google Scholar]
- Milstein, A.B.; Jiang, L.A.; Luu, J.X.; Hines, E.L.; Schultz, K.I. Acquisition algorithm for direct-detection ladars with Geiger-mode avalanche photodiodes. Appl. Opt. 2008, 47, 296–311. [Google Scholar] [CrossRef]
- Lu, D.; Li, D.; Zhu, X.; Nie, S.; Zhou, G.; Zhang, X.; Yang, C. Denoising and Classification of ICESat-2 Photon Point Cloud based on Convolutional Neural Network. J. Geol. Inf. Sci. 2021, 23, 2086–2095. [Google Scholar]
- Zhu, X. Forest Height Retrieval of China with a Resolution of 30 m Using ICESat-2 and GEDI Data; University of the Chinese Academy of Sciences: Beijing, China, 2021. [Google Scholar]
- Magruder, L.A.; Wharton, M.E., III; Stout, K.D.; Neuenschwander, A.L. Noise Filtering Techniques for Photon-Counting Ladar Data. In Laser Radar Technology and Applications XVII; SPIE: Bellingham, WA, USA, 2012; pp. 237–245. [Google Scholar]
- Zhang, X.; Wang, L.; Li, J.; Han, W.; Fan, R.; Wang, S. Satellite-derived sediment distribution mapping using ICESat-2 and SuperDove. ISPRS J. Photogramm. Remote Sens. 2023, 202, 545–564. [Google Scholar] [CrossRef]
- Huang, J.; Xing, Y.; You, H.; Qin, L.; Tian, J.; Ma, J. Particle swarm optimization-based noise filtering algorithm for photon cloud data in forest area. Remote Sens. 2019, 11, 980. [Google Scholar] [CrossRef]
- Li, Y.; Fu, H.; Zhu, J.; Wang, C. A filtering method for ICESat-2 photon point cloud data based on relative neighboring relationship and local weighted distance statistics. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1891–1895. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Hu, Z. A ground elevation and vegetation height retrieval algorithm using micro-pulse photon-counting lidar data. Remote Sens. 2018, 10, 1962. [Google Scholar] [CrossRef]
- Huang, J. Study on canopy height estimation based on ICESat-2/ATLAS photon-counting LiDAR data. J. Northeast For. Univ. 2021, 73, 271–276. [Google Scholar]
- Huang, X.; Cheng, F.; Wang, J.; Duan, P.; Wang, J. Forest Canopy Height Extraction Method Based on ICESat-2/ATLAS Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
- Neuenschwander, A.L.; Magruder, L.A. Canopy and terrain height retrievals with ICESat-2: A first look. Remote Sens. 2019, 11, 1721. [Google Scholar] [CrossRef]
- Yanqiu, X.; Lei, Q. Accuracy of photon cloud noise filtering algorithm in forest area under weak beam conditions. Trans. Chin. Soc. Agric. Mach. 2020, 51, 164–172. [Google Scholar]
- Neuenschwander, A.; Pitts, K.; Jelley, B.; Robbins, J.; Markel, J.; Popescu, S.; Nelson, R.; Harding, D.; Pederson, D.; Klotz, B. Ice, Cloud, and Land Elevation Satellite 2 (ICESat-2) Algorithm Theoretical Basis Document (ATBD) for Land-Vegetation Along-Track Products (ATL08); NASA: Washington, DC, USA, 2019.
- Carrasco, L.; Giam, X.; Papeş, M.; Sheldon, K.S. Metrics of lidar-derived 3D vegetation structure reveal contrasting effects of horizontal and vertical forest heterogeneity on bird species richness. Remote Sens. 2019, 11, 743. [Google Scholar] [CrossRef]
- Wang, Y. Signal Processing on Spaceborne Photon Counting Laser Point Cloud and its Applications in Vegetation Remote Sensing. Wuhan Univ. 2020, 3. [Google Scholar] [CrossRef]
- Huang, J.; Xing, Y.; Shuai, Y.; Zhu, H. A Novel Noise Filtering Evaluation Criterion of ICESat-2 Signal Photon Data in Forest Environments. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Zhang, G.; Lian, W.; Li, S.; Cui, H.; Jing, M.; Chen, Z. A Self-Adaptive Denoising Algorithm Based on Genetic Algorithm for Photon-Counting Lidar Data. IEEE Geosci. Remote Sens. Lett. 2022, 19, 3067609. [Google Scholar] [CrossRef]
- Wang, Z.; Nie, S.; Xi, X.; Wang, C.; Lao, J.; Yang, Z. A methodological framework for specular return removal from photon-counting LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2023, 122, 103387. [Google Scholar] [CrossRef]
- Qin, L.; Xing, Y.; Huang, J.; Ma, J.; An, L. Adaptive denoising and classification algorithms for ICESat-2 airborne experimental photon cloud data of 2018. J. Remote Sens. 2020, 24, 1476–1487. [Google Scholar] [CrossRef]
- Lao, J.; Wang, C.; Nie, S.; Xi, X.; Long, H.; Feng, B.; Wang, Z. A new denoising method for photon-counting LiDAR data with different surface types and observation conditions. Int. J. Digit. Earth 2023, 16, 1551–1567. [Google Scholar] [CrossRef]
- Li, Y.; Fu, H.; Zhu, J.; Wang, L.; Zhao, R.; Wang, C. A Photon Cloud Filtering Method in Forested Areas Considering the Density Difference Between Canopy Photons and Ground Photons. IEEE Trans. Geosci. Remote Sens. 2023, 61, 3267823. [Google Scholar] [CrossRef]
- Zhang, J.; Kerekes, J. An adaptive density-based model for extracting surface returns from photon-counting laser altimeter data. IEEE Geosci. Remote Sens. Lett. 2014, 12, 726–730. [Google Scholar] [CrossRef]
- Meng, W.; Li, J.; Tang, Q.; Xu, W.; Dong, Z. ICESat-2 laser data denoising algorithm based on a back propagation neural network. Appl. Opt. 2022, 61, 8395–8404. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Zhu, J.; Fu, H.; Gao, S.; Wang, C. Filtering Photon Cloud Data in Forested Areas Based on Elliptical Distance Parameters and Machine Learning Approach. Forests 2022, 13, 663. [Google Scholar] [CrossRef]
- Xie, F.; Yang, G.; Shu, R.; Li, M. An adaptive directional filter for photon counting Lidar point cloud data. J. Infrared Millim. Waves 2017, 36, 107–113. [Google Scholar]
- Gan, J.; Tao, Y. On the hardness and approximation of Euclidean DBSCAN. ACM Trans. Database Syst. TODS 2017, 42, 1–45. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Site | ICESat-2 Data | Ground Track |
|---|---|---|
| Study area 1 | ATL03_20210718232050_03871202_005_01.h5 ATL08_20210718232050_03871202_005_01.h5 | GT1R (strong beam) GT1L (weak beam) |
| Study area 2 | ATL03_20210515235947_07971102_005_01.h5 ATL08_20210515235947_07971102_005_01.h5 | GT1R (strong beam) GT1L (weak beam) |
| Study Site | Period | Altitude (m) | Slope (°) | Average Canopy Height (m) |
|---|---|---|---|---|
| Study area 1 | 2021/07 | 365–708 | 0–24.23 | 34 |
| Study area 2 | 2021/09 | 47–55 | 0–1.32 | 27 |
| Accuracy Evaluation Index | Study Area 1 | Study Area 2 | ||
|---|---|---|---|---|
| Strong Beam | Weak Beam | Strong Beam | Weak Beam | |
| Rs | 1.00 | 1.00 | 1.00 | 1.00 |
| Rn | 0.61 | 0.70 | 0.29 | 0.52 |
| Filter Direction | Algorithm | Accuracy Evaluation Index | |||
|---|---|---|---|---|---|
| Rs | Rn | p | F | ||
| Horizontal direction | OPTICS | 0.99 | 0.60 | 0.51 | 0.67 |
| RNR−KNNB | 0.97 | 0.65 | 0.54 | 0.69 | |
| Intra-group unified direction | OPTICS | 0.99 | 0.61 | 0.51 | 0.67 |
| RNR−KNNB | 0.96 | 0.65 | 0.54 | 0.68 | |
| Adaptive direction for each photon | OPTICS | 0.99 | 0.60 | 0.50 | 0.65 |
| RNR−KNNB | 0.98 | 0.63 | 0.52 | 0.67 | |
| - | ATL08 | 0.85 | 0.67 | 0.52 | 0.65 |
| Filter Direction | Algorithm | Accuracy Evaluation Index | |||
|---|---|---|---|---|---|
| Rs | Rn | p | F | ||
| Horizontal direction | OPTICS | 0.97 | 0.80 | 0.47 | 0.63 |
| RNR−KNNB | 0.92 | 0.87 | 0.55 | 0.68 | |
| RANSAC | 0.92 | 0.88 | 0.57 | 0.69 | |
| Intra-group unified direction | OPTICS | 0.97 | 0.79 | 0.46 | 0.62 |
| RNR−KNNB | 0.92 | 0.87 | 0.55 | 0.68 | |
| RANSAC | 0.92 | 0.87 | 0.56 | 0.69 | |
| Adaptive direction for each photon | OPTICS | 0.95 | 0.75 | 0.41 | 0.55 |
| RNR−KNNB | 0.94 | 0.80 | 0.45 | 0.59 | |
| RANSAC | 0.94 | 0.84 | 0.51 | 0.65 | |
| - | ATL08 | 0.88 | 0.87 | 0.55 | 0.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, H.; Li, Y.; Qin, Z.; Lei, P.; Chen, J.; Shi, X. Research on Multilevel Filtering Algorithm Used for Denoising Strong and Weak Beams of Daytime Photon Cloud Data with High Background Noise. Remote Sens. 2023, 15, 4260. https://doi.org/10.3390/rs15174260
You H, Li Y, Qin Z, Lei P, Chen J, Shi X. Research on Multilevel Filtering Algorithm Used for Denoising Strong and Weak Beams of Daytime Photon Cloud Data with High Background Noise. Remote Sensing. 2023; 15(17):4260. https://doi.org/10.3390/rs15174260
Chicago/Turabian StyleYou, Haotian, Yuecan Li, Zhigang Qin, Peng Lei, Jianjun Chen, and Xue Shi. 2023. "Research on Multilevel Filtering Algorithm Used for Denoising Strong and Weak Beams of Daytime Photon Cloud Data with High Background Noise" Remote Sensing 15, no. 17: 4260. https://doi.org/10.3390/rs15174260