
Recognition of the Bare Soil Using Deep Machine Learning Methods to Create Maps of Arable Soil Degradation Based on the Analysis of Multi-Temporal Remote Sensing Data

Abstract
:1. Introduction
- Soil cover degradation can be detected based on the recognition of bare soil surface in the analysis of big satellite data.
- The selection of satellite imagery to define the bare soil surface can be performed using deep machine learning methods.
- An indicator of distribution of degradation can be the average long-term deviations of spectral brightness from the average spectral brightness characteristics of an agricultural field.
- It is possible to verify the results of identifying degradation areas by ground methods.
- Boundary conditions for identifying soil degradation areas can be defined by the method of retrospective monitoring of land use and soil cover.
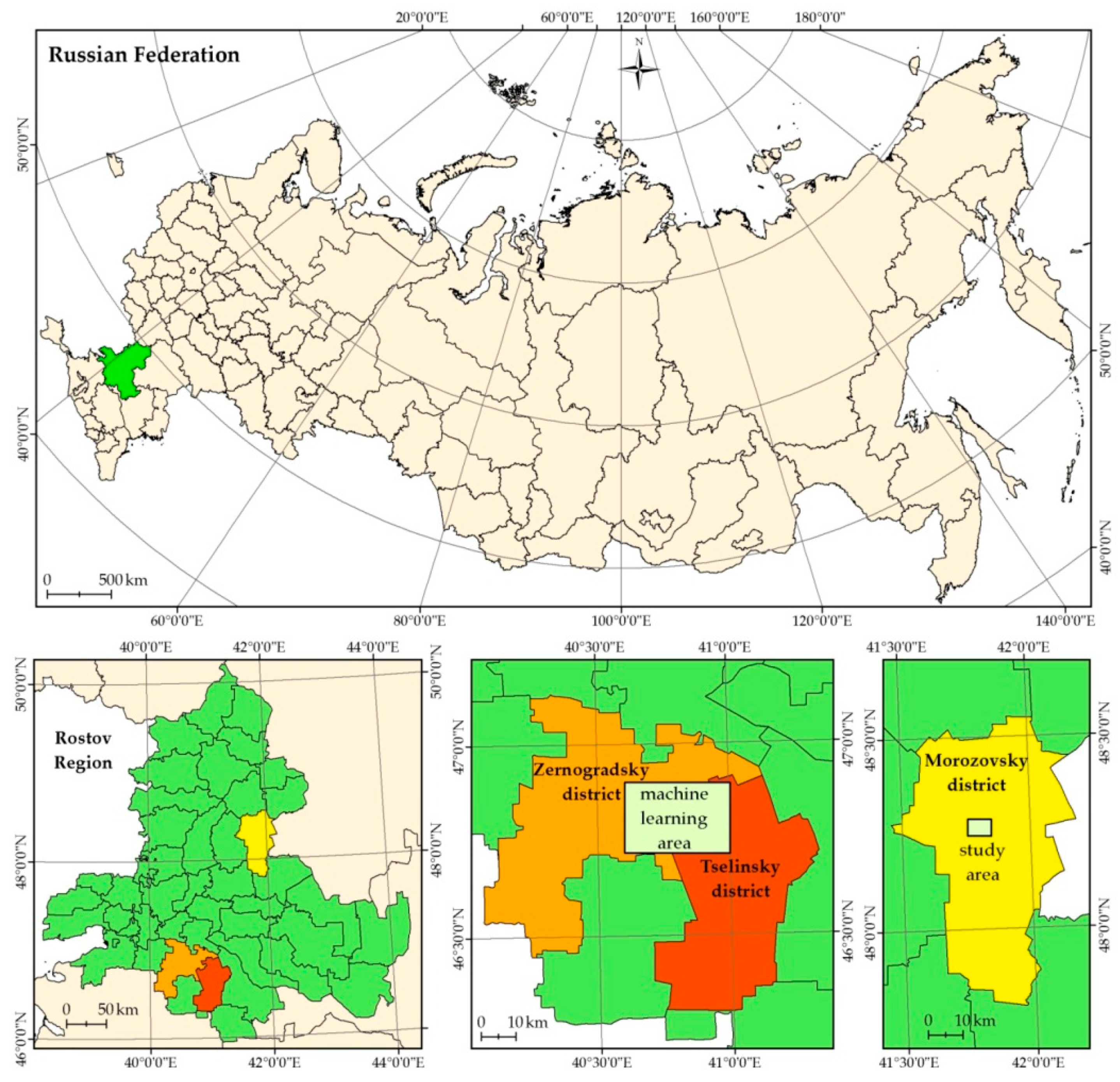
2. Materials and Methods
2.1. Creating a Map of Arable Lands Boundaries
2.2. Dataset Development
2.3. Methods for Assessing the Quality of Machine Learning Algorithms
- Test sample. A set of objects not used in learning.
- Acceptance sample. An independent set of objects not used in development.
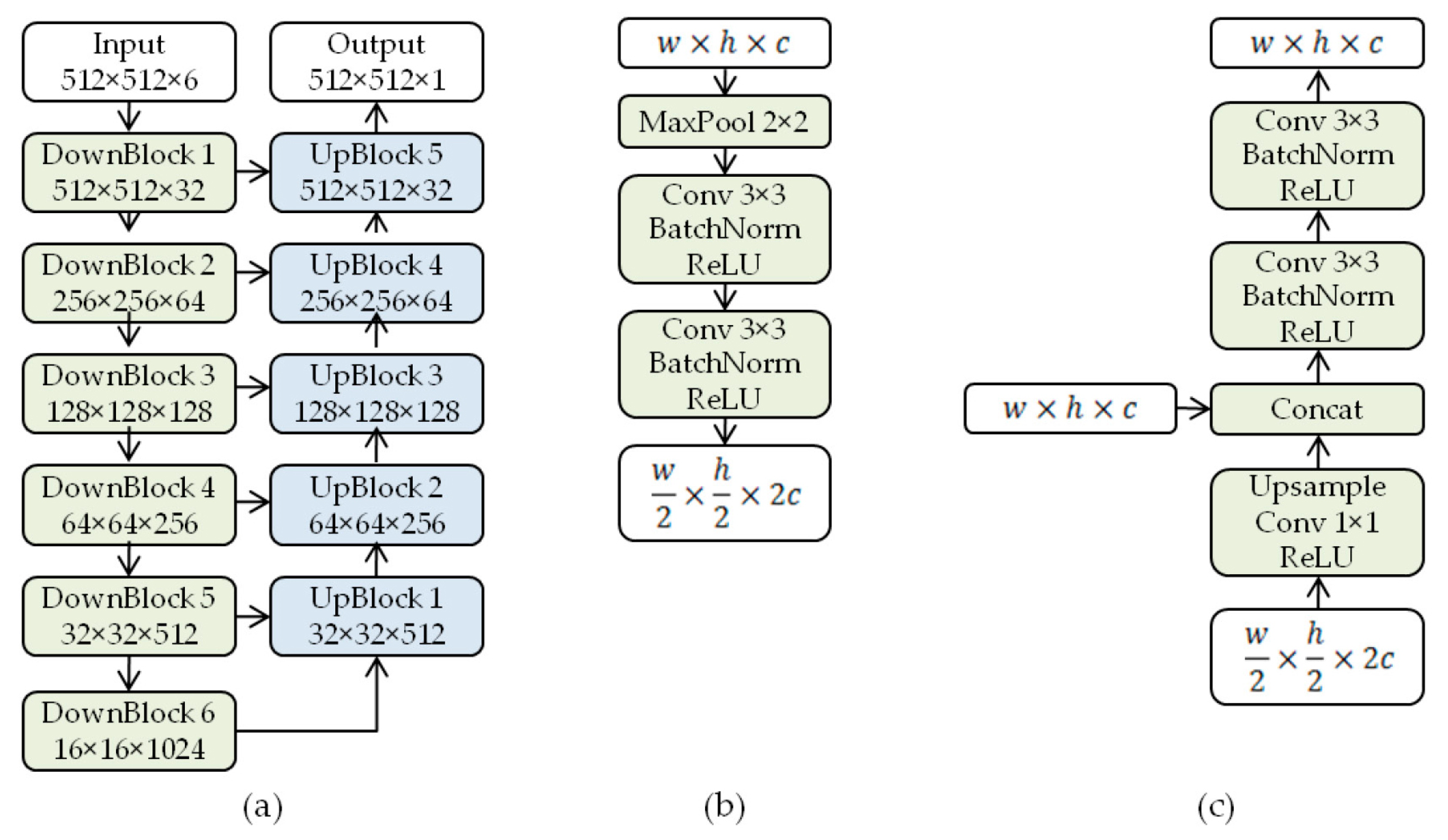
2.4. Deep Machine Learning, Convolutional Neural Networks Method
2.4.1. Model
2.4.2. Training
2.4.3. Validation
2.4.4. Evaluation
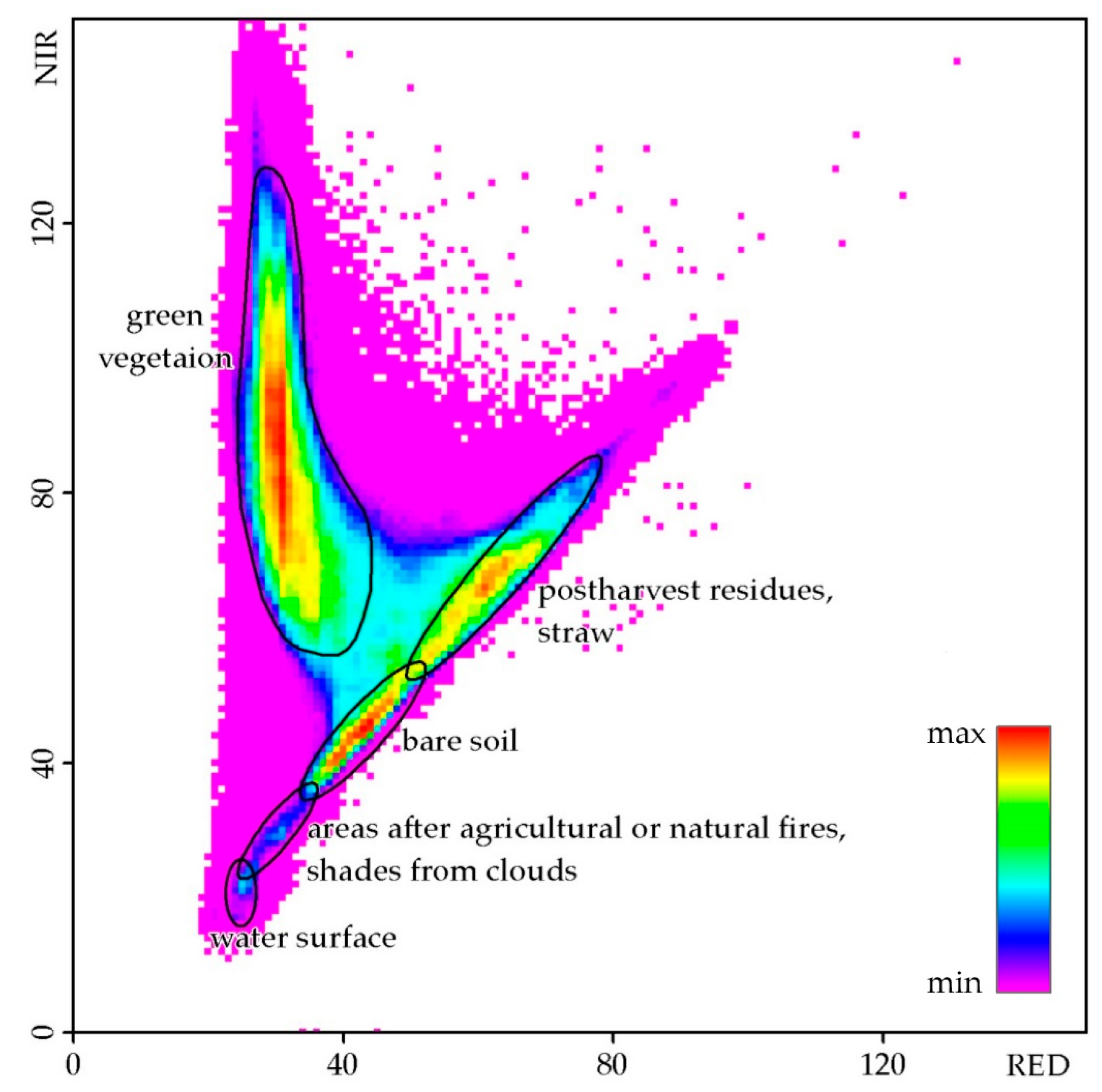
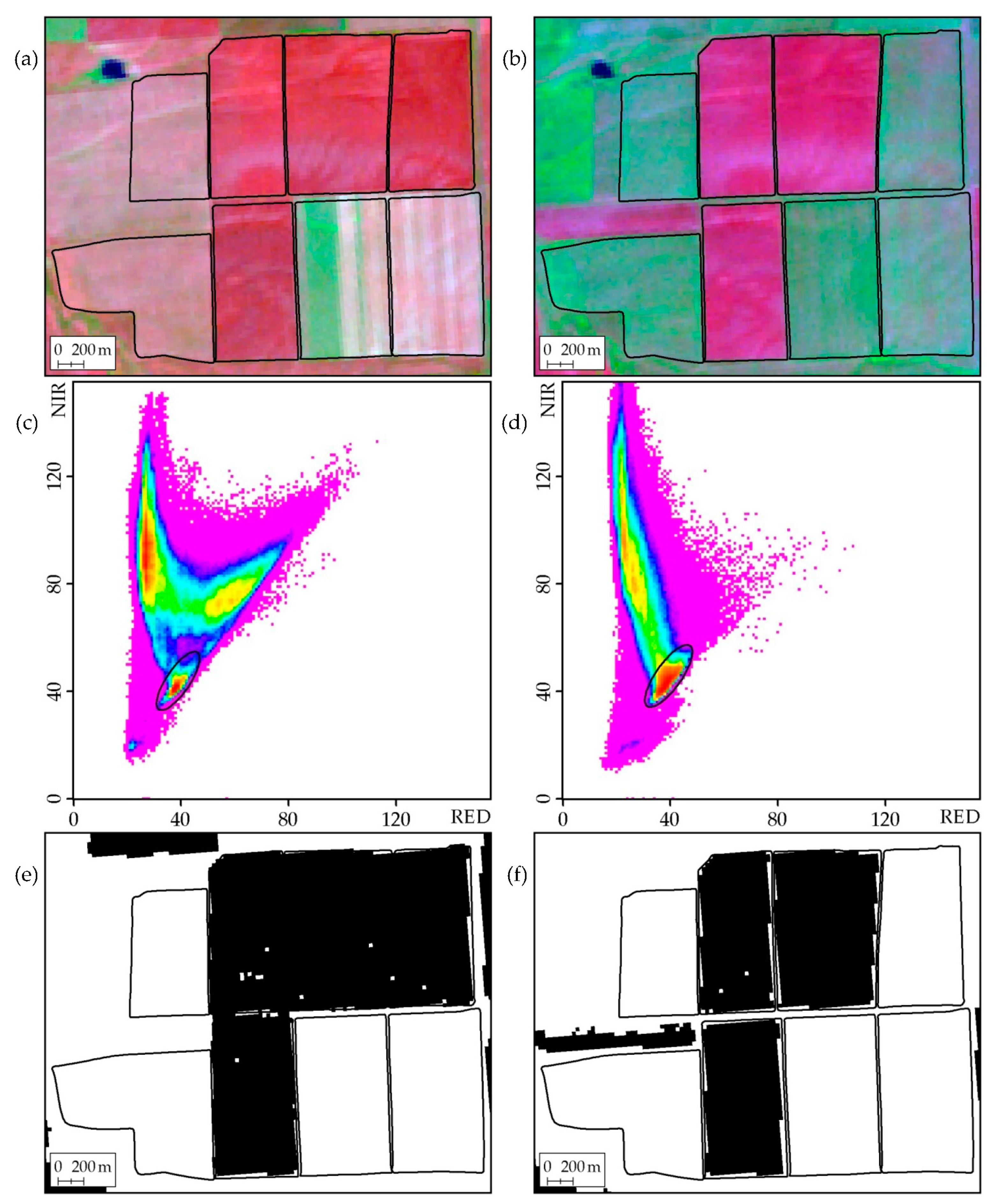
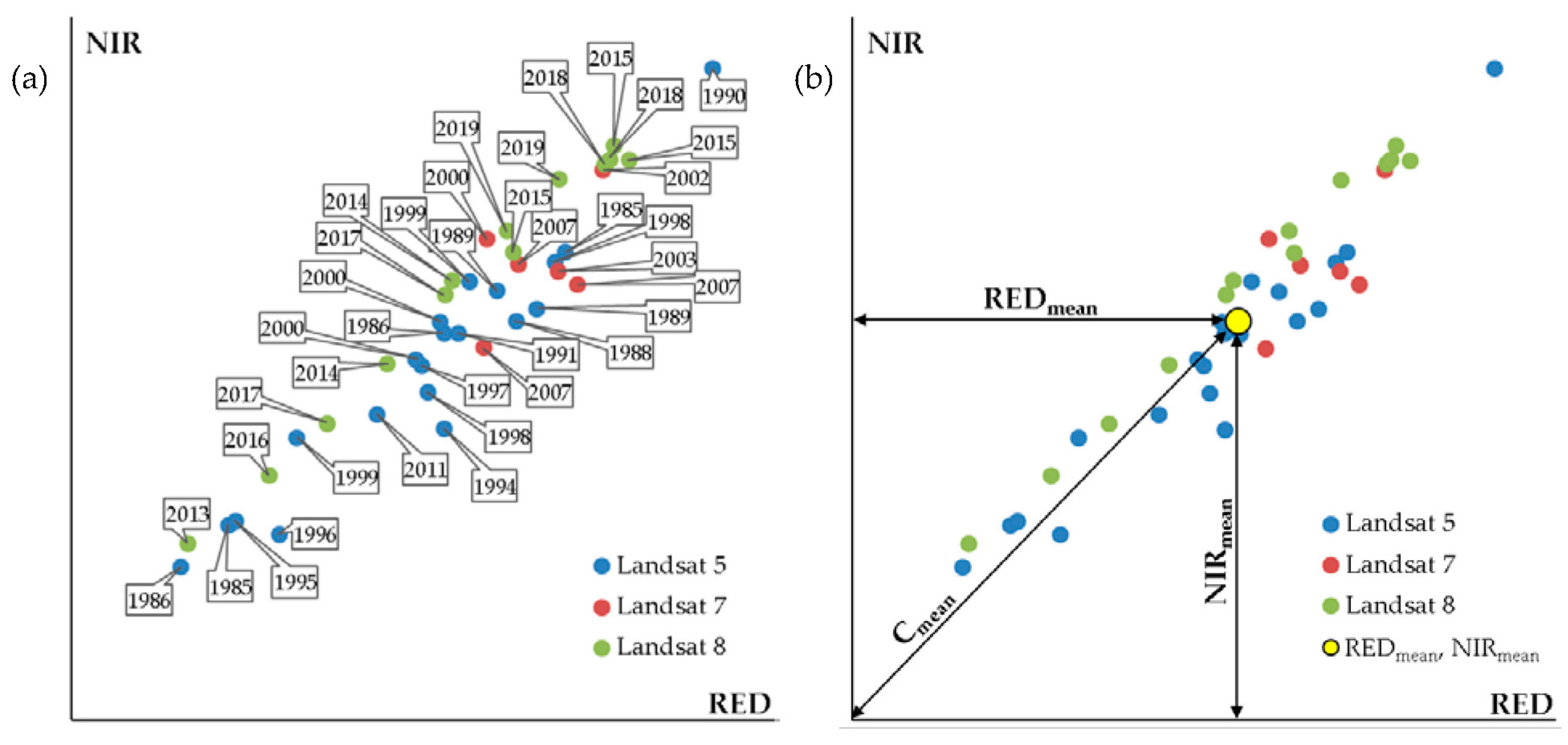
2.5. Calculation of the Average Multi-Temporal Values of the RED and NIR Spectral Bands for the Bare Soil Surface
2.6. Calculation of the Average Multi-Temporal Distance of a Set of RED and NIR Values for the BSS (Cmean Coefficient Calculation)
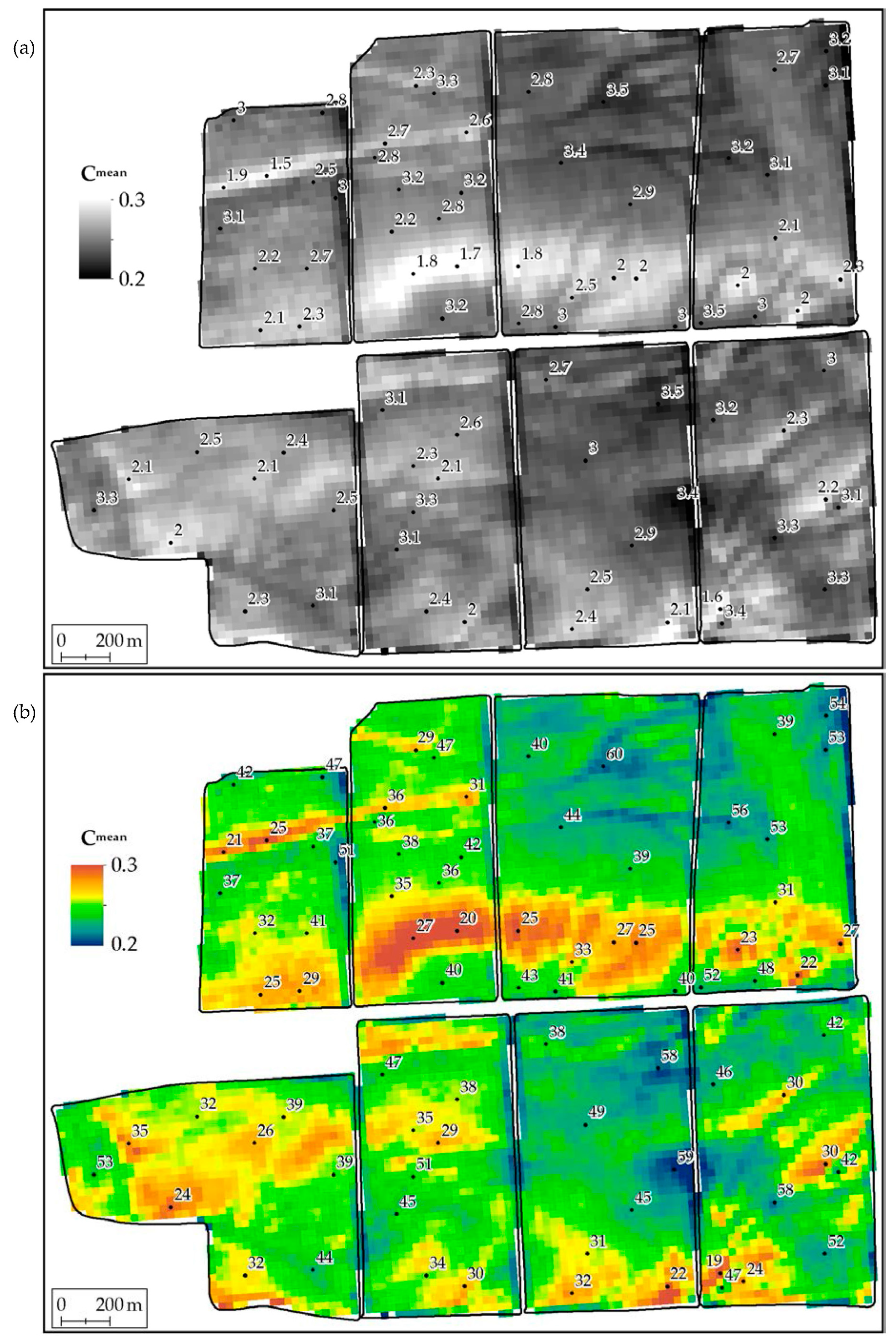
2.7. Maps of Cmean Coefficient Values
2.8. Identification of Degradation Areas on the Map of Cmean Coefficient Values
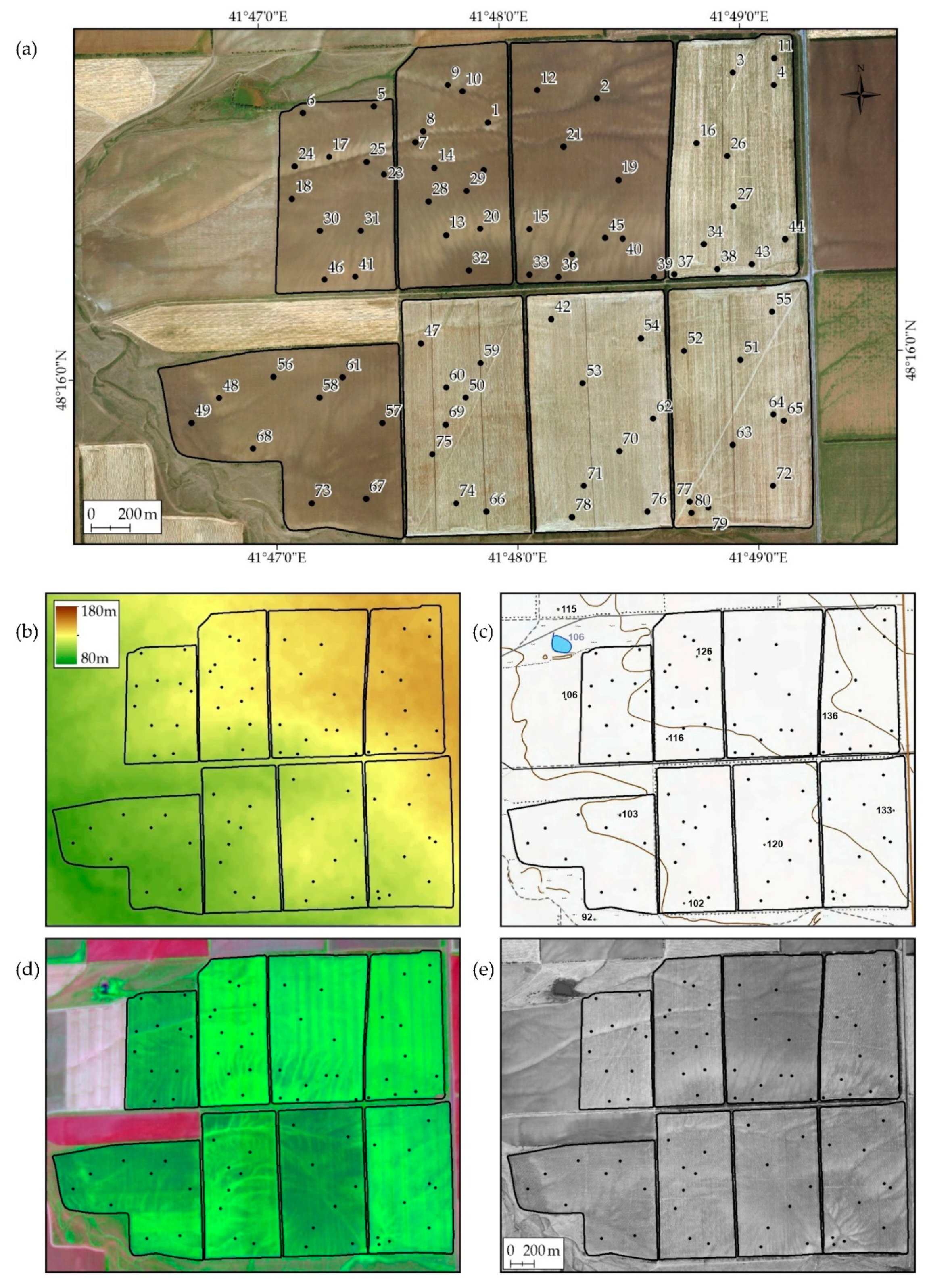
2.9. Ground Verification
2.10. Cartographic Analysis
2.11. GIS Project
- Topographic maps at scales of 1:25,000 and 1:50,000.
- Panchromatic aerial photography (2012) with a spatial resolution of 0.6 m (orthophotomap).
- Digital elevation model Shuttle radar topographic mission (SRTM) [26], horizontal resolution is 1 arc second and vertical resolution is 1 m.
- Scanned analogue space imagery of 1968 with a spatial resolution of 1.8 m (panchromatic, KH-4B satellite, US CORONA mission).
- Scanned analogue space imagery of 1975 with a spatial resolution of 6 m (panchromatic, KH-9 satellite, US CORONA mission).
- RSD Landsat 4, 5, 7 and 8 1985–2021 (133 scenes).
- RSD Sentinel-2 2016–2021 (224 tiles).
3. Results
3.1. Deep Machine Learning: Implementation of the Method of Convolutional Neural Networks
3.2. Additions to the GIS Project
- 8.
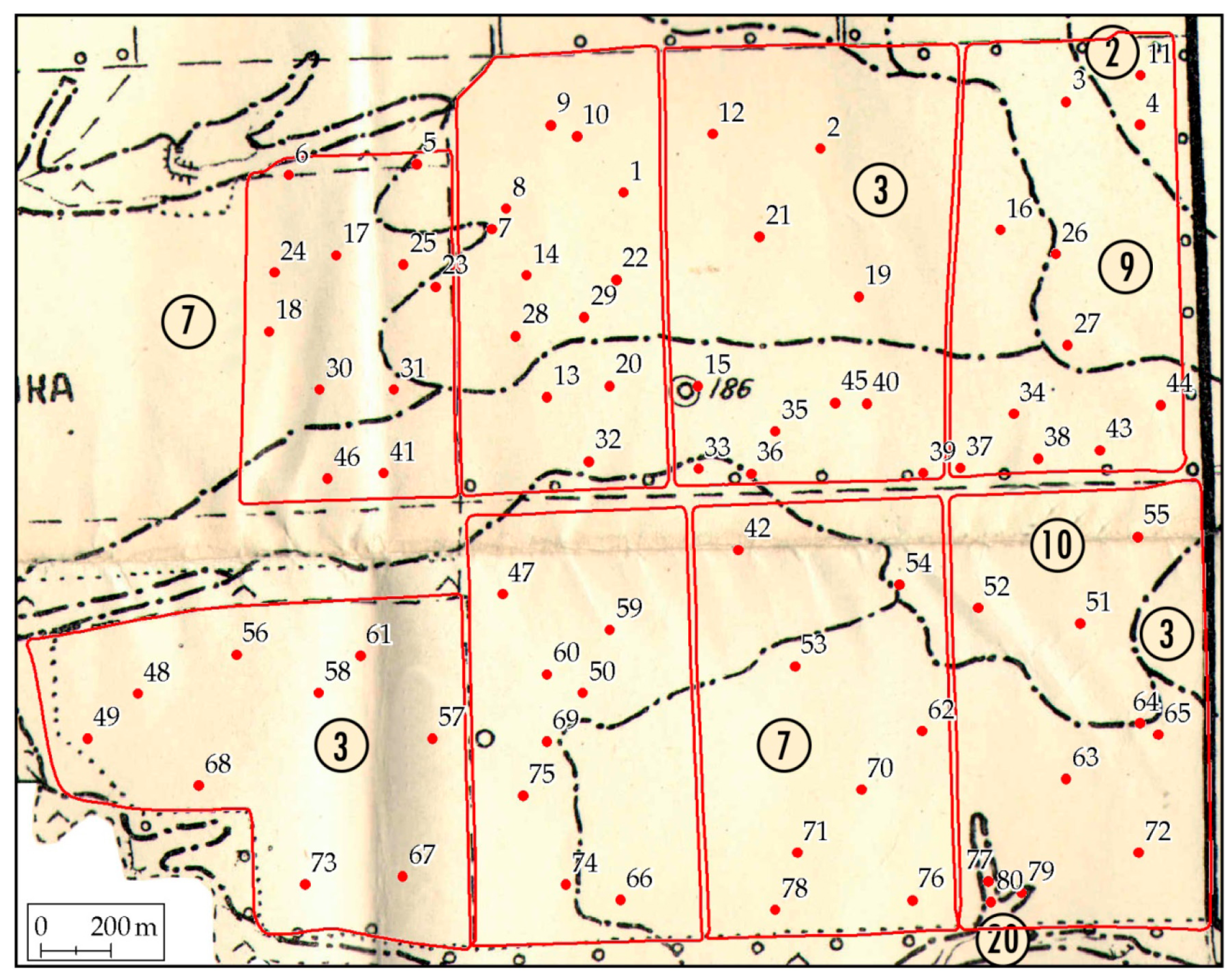
- Scheme of agricultural fields (limits of distribution of calculations of the coefficient Cmean).
- 9.
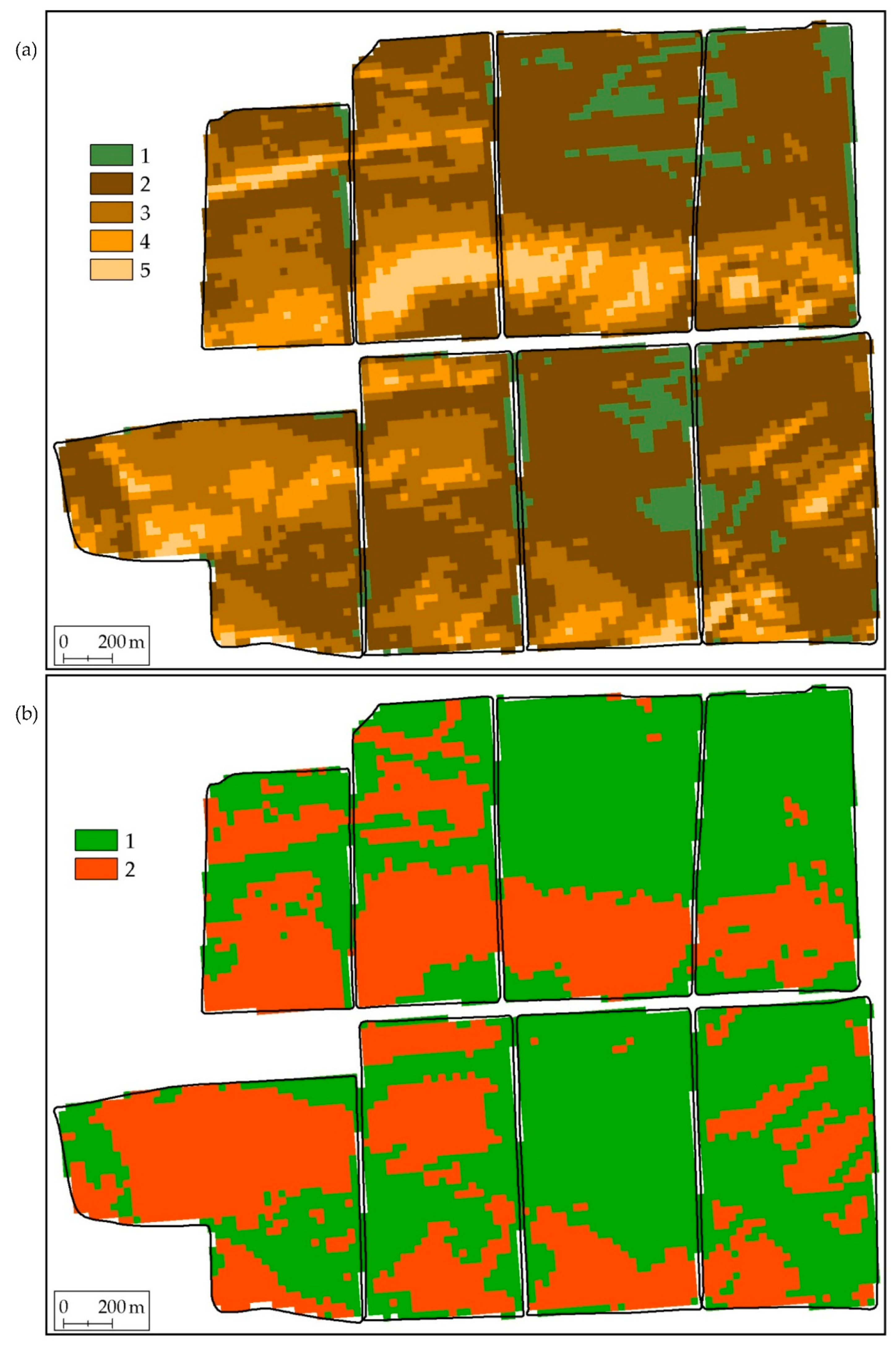
- Map of Cmean coefficient values.
- 10.
- Binary map of the distribution of soil degradation.
- 11.
- Soil map constructed in the result of the classification of the Cmean coefficient.
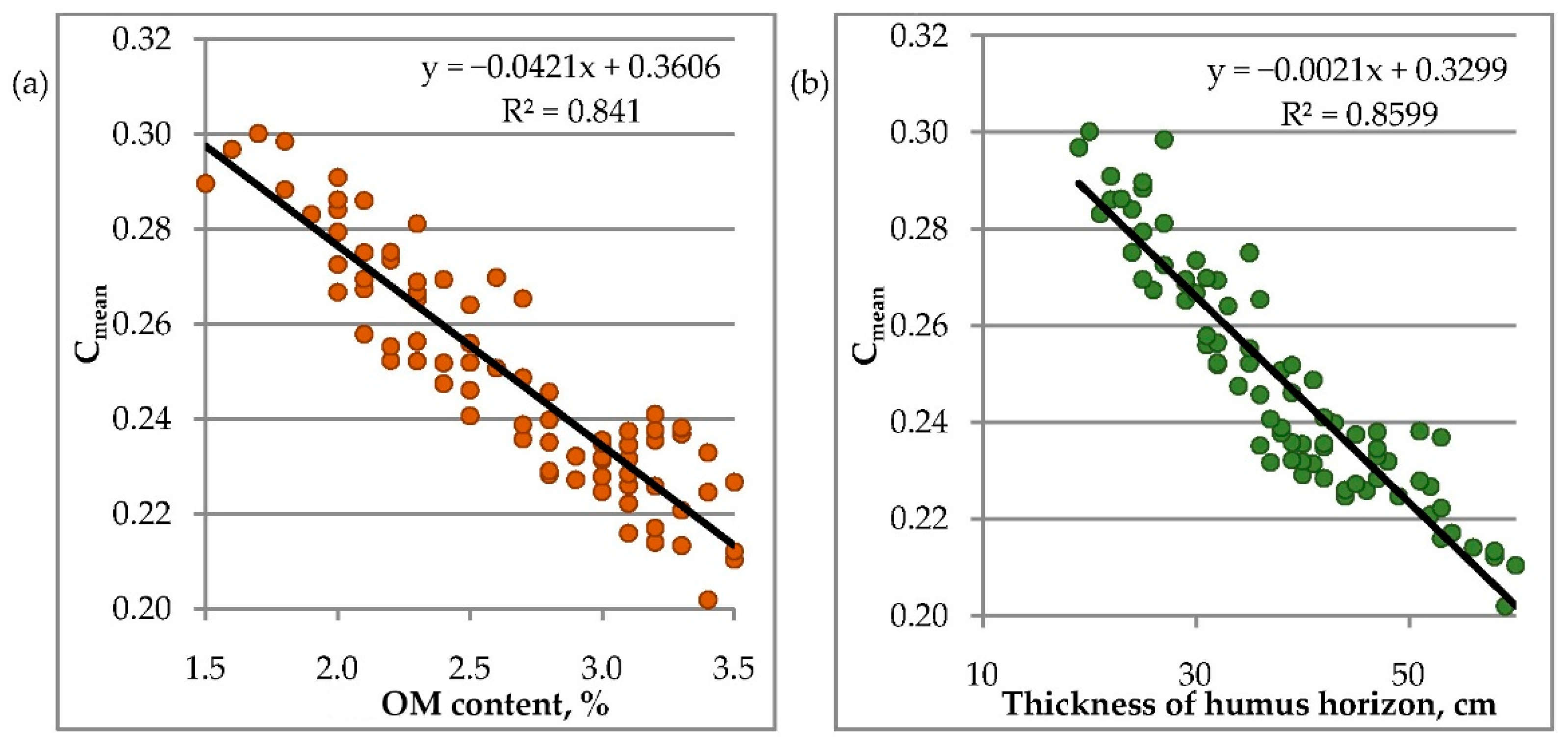
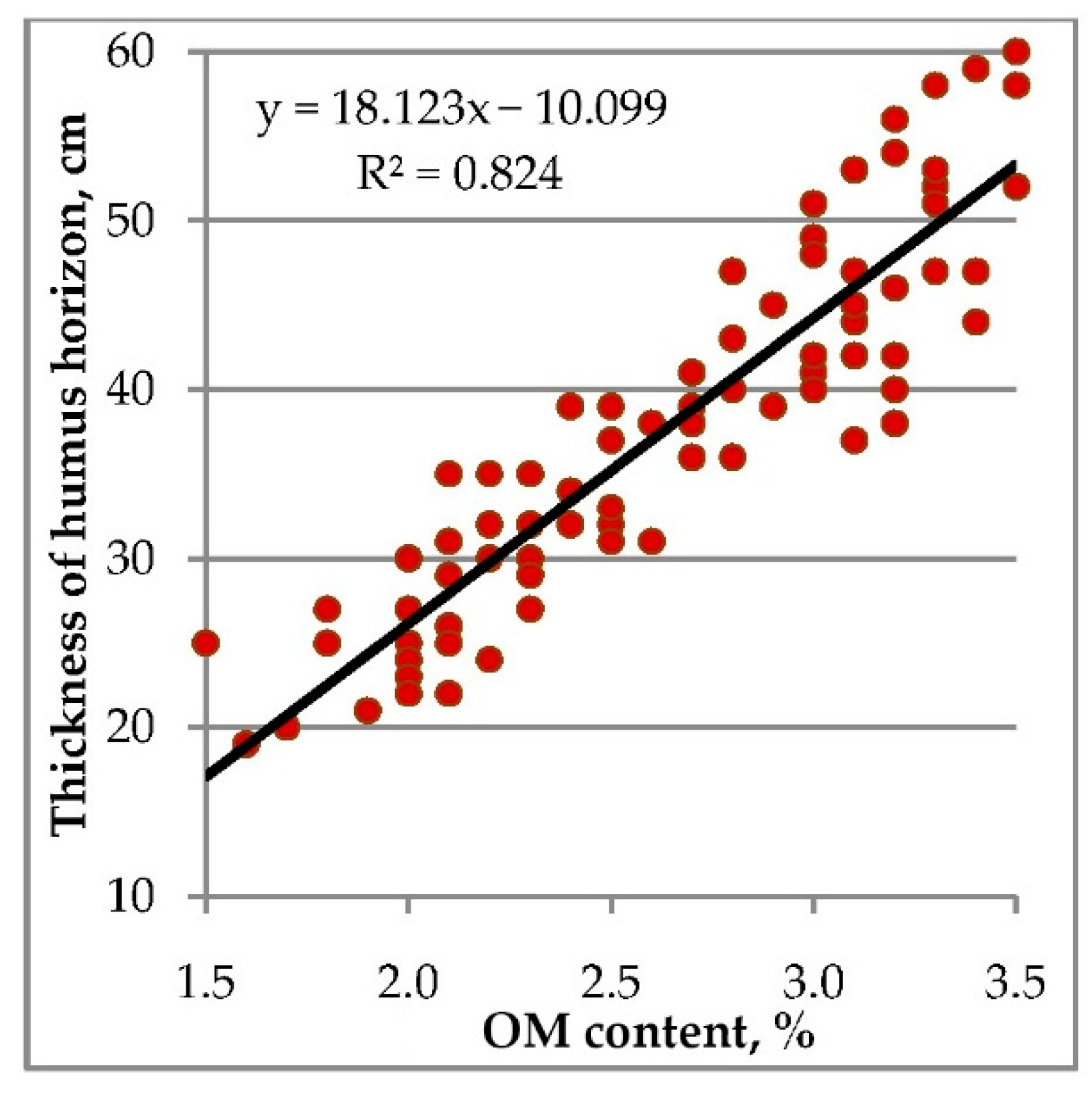
3.3. Ground Verification and Soil Interpretation of the Cmean Coefficient Map
3.4. Ground Verification of the Degradation Distribution Map
4. Discussion
4.1. Sources and Methods for Detecting Soil Degradation
4.2. Analysis of I and II Type Errors
4.3. Analysis of Previously Compiled Degradation Maps
4.4. Perspective Remote Sensing Data
4.5. Physical Interpretation of Work Technology
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ischenko, T.A. (Ed.) All-Union Instruction on Soil Surveys and the Compilation of Large-Scale Soil Land Use Maps; Kolos: Moscow, Russia, 1973. (In Russian) [Google Scholar]
- Zhang, Y.; Walker, J.P.; Pauwels, V.R.N.; Sadeh, Y. Assimilation of Wheat and Soil States into the APSIM-Wheat Crop Model: A Case Study. Remote Sens. 2022, 14, 65. [Google Scholar] [CrossRef]
- Qi, G.; Chang, C.; Yang, W.; Gao, P.; Zhao, G. Soil Salinity Inversion in Coastal Corn Planting Areas by the Satellite-UAV-Ground Integration Approach. Remote Sens. 2021, 13, 3100. [Google Scholar] [CrossRef]
- Romano, E.; Bergonzoli, S.; Pecorella, I.; Bisaglia, C.; De Vita, P. Methodology for the Definition of Durum Wheat Yield Homogeneous Zones by Using Satellite Spectral Indices. Remote Sens. 2021, 13, 2036. [Google Scholar] [CrossRef]
- Iwahashi, Y.; Ye, R.; Kobayashi, S.; Yagura, K.; Hor, S.; Soben, K.; Homma, K. Quantification of Changes in Rice Production for 2003–2019 with MODIS LAI Data in Pursat Province, Cambodia. Remote Sens. 2021, 13, 1971. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Koroleva, P.V.; Rukhovich, D.D.; Kalinina, N.V. The Use of Deep Machine Learning for the Automated Selection of Remote Sensing Data for the Determination of Areas of Arable Land Degradation Processes Distribution. Remote Sens. 2021, 13, 155. [Google Scholar] [CrossRef]
- Khitrov, N.B.; Rukhovich, D.I.; Koroleva, P.V.; Kalinina, N.V.; Trubnikov, A.V.; Petukhov, D.A.; Kulyanitsa, A.L. A study of the responsiveness of crops to fertilizers by zones of stable intra-field heterogeneity based on big satellite data analysis. Arch. Agron. Soil Sci. 2020, 66, 1963–1975. [Google Scholar] [CrossRef]
- Kulyanitsa, A.L.; Rukhovich, D.I.; Koroleva, P.V.; Vilchevskaya, E.V.; Kalinina, N.V. Analysis of the informativity of big satellite precision-farming data processing for correcting large-scale soil maps. Eurasian Soil Sci. 2020, 53, 1709–1725. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Koroleva, P.V.; Kalinina, N.V.; Vilchevskaya, E.V.; Suleiman, G.A.; Chernousenko, G.I. Detecting Degraded Arable Land on the Basis of Remote Sensing Big Data Analysis. Eurasian Soil Sci. 2021, 54, 161–175. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Rukhovich, A.D.; Rukhovich, D.D.; Simakova, M.S.; Kulyanitsa, A.L.; Bryzzhev, A.V.; Koroleva, P.V. The informativeness of coefficients a and b of the soil line for the analysis of remote sensing materials. Eurasian Soil Sci. 2016, 49, 831–845. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Rukhovich, A.D.; Rukhovich, D.D.; Simakova, M.S.; Kulyanitsa, A.L.; Bryzzhev, A.V.; Koroleva, P.V. Maps of averaged spectral deviations from soil lines and their comparison with traditional soil maps. Eurasian Soil Sci. 2016, 49, 739–756. [Google Scholar] [CrossRef]
- Kulyanitsa, A.L.; Rukhovich, A.D.; Rukhovich, D.D.; Koroleva, P.V.; Rukhovich, D.I.; Simakova, M.S. The Application of the Piecewise Linear Approximation to the Spectral Neighborhood of Soil Line for the Analysis of the Quality of Normalization of Remote Sensing Materials. Eurasian Soil Sci. 2017, 50, 387–396. [Google Scholar] [CrossRef]
- Koroleva, P.V.; Rukhovich, D.I.; Rukhovich, A.D.; Rukhovich, D.D.; Kulyanitsa, A.L.; Trubnikov, A.V.; Kalinina, N.V.; Simakova, M.S. Location of bare soil surface and soil line on the RED–NIR spectral plane. Eurasian Soil Sci. 2017, 50, 1375–1385. [Google Scholar] [CrossRef]
- Koroleva, P.V.; Rukhovich, D.I.; Rukhovich, A.D.; Rukhovich, D.D.; Kulyanitsa, A.L.; Trubnikov, A.V.; Kalinina, N.V.; Simakova, M.S. Characterization of soil types and subtypes in N-dimensional space of multitemporal (empirical) soil line. Eurasian Soil Sci. 2018, 51, 1021–1033. [Google Scholar] [CrossRef]
- Farifteh, J.; Van Der Meer, F.; Atzberger, C.; Carranza, E.J.M. Quantitative analysis of salt-affected soil reflectance spectra: A comparison of two adaptive methods (PLSR and ANN). Remote Sens. Environ. 2007, 110, 59–78. [Google Scholar] [CrossRef]
- Higginbottom, T.P.; Symeonakis, E. Assessing Land Degradation and Desertification Using Vegetation Index Data: Current Frameworks and Future Directions. Remote Sens. 2014, 6, 9552–9575. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, Y.Z.; Balzter, H.; Kaduk, J.; Tucker, C.J. Land degradation assessment using residual trend analysis of GIMMS NDVI3g, soil moisture and rainfall in sub-Saharan west Africa from 1982 to 2012. Remote Sens. 2015, 7, 5471–5494. [Google Scholar] [CrossRef] [Green Version]
- Mendonça-Santos, M.D.L.; Dart, R.O.; Santos, H.G.; Coelho, M.R.; Berbara, R.L.L.; Lumbreras, J.F. Digital Soil Mapping of Topsoil Organic Carbon Content of Rio de Janeiro State, Brazil. In Digital Soil Mapping; Boettinger, J.L., Howell, D.W., Moore, A.C., Hartemink, A.E., Kienast-Brown, S., Eds.; Springer: New York, NY, USA, 2010; pp. 255–266. [Google Scholar] [CrossRef] [Green Version]
- Romanenkov, V.; Smith, J.; Smith, P.; Sirotenko, O.D.; Rukhovitch, D.I.; Romanenko, I.A. Soil organic carbon dynamics of croplands in European Russia: Estimates from the “model of humus balance”. Reg. Environ. Chang. 2007, 7, 93–104. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Koroleva, P.V.; Vilchevskaya, E.V.; Romanenkov, V.; Kolesnikova, L.G. Constructing a spatially-resolved database for modelling soil organic carbon stocks of croplands in European Russia. Reg. Environ. Chang. 2007, 7, 51–61. [Google Scholar] [CrossRef]
- Glazunov, G.P.; Gendugov, V.M. A full-scale model of wind erosion and its verification. Eurasian Soil Sci. 2003, 36, 216–226. [Google Scholar]
- Larionov, G.A.; Dobrovol’skaya, N.G.; Krasnov, S.F.; Liu, B.Y. The new equation for the relief factor in statistical models of water erosion. Eurasian Soil Sci. 2003, 36, 1105–1113. [Google Scholar]
- Maltsev, K.A.; Yermolaev, O.P. Potential Soil Loss from Erosion on Arable Lands in the European Part of Russia. Eurasian Soil Sci. 2019, 52, 1588–1597. [Google Scholar] [CrossRef]
- Sukhanovskii, Y.P. Rainfall erosion model. Eurasian Soil Sci. 2010, 43, 1036–1046. [Google Scholar] [CrossRef]
- AShary, P.; Sharaya, L.S.; Mitusov, A.V. Fundamental quantitative methods of land surface analysis. Geoderma 2002, 107, 1–32. [Google Scholar] [CrossRef]
- SRTM. Available online: http://srtm.csi.cgiar.org (accessed on 21 February 2022).
- Farm Management. Satellite Big Data: How It Is Changing the Face of Precision Farming. Available online: http://www.farmmanagement.pro/satellite-big-data-how-it-is-changing-the-face-of-precision-farming/ (accessed on 21 February 2022).
- Koroleva, P.V.; Rukhovich, D.I.; Shapovalov, D.A.; Suleiman, G.A.; Dolinina, E.A. Retrospective Monitoring of Soil Waterlogging on Arable Land of Tambov Oblast in 2018–1968. Eurasian Soil Sci. 2019, 52, 834–852. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Simakova, M.S.; Kulyanitsa, A.L.; Bryzzhev, A.V.; Koroleva, P.V.; Kalinina, N.V.; Chernousenko, G.I.; Vil’Chevskaya, E.V.; Dolinina, E.A. The influence of soil salinization on land use changes in azov district of Rostov oblast. Eurasian Soil Sci. 2017, 50, 276–295. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Simakova, M.S.; Kulyanitsa, A.L.; Bryzzhev, A.V.; Koroleva, P.V.; Kalinina, N.V.; Chernousenko, G.I.; Vil’Chevskaya, E.V.; Dolinina, E.A.; Rukhovich, S.V. Methodology for Comparing Soil Maps of Different Dates with the Aim to Reveal and Describe Changes in the Soil Cover (By the Example of Soil Salinization Monitoring). Eurasian Soil Sci. 2016, 49, 145–162. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Simakova, M.S.; Kulyanitsa, A.L.; Bryzzhev, A.V.; Koroleva, P.V.; Kalinina, N.V.; Vil’Chveskaya, E.V.; Dolinina, E.A.; Rukhovich, S.V. Retrospective analysis of changes in land uses on vertic soils of closed mesodepressions on the Azov plain. Eurasian Soil Sci. 2015, 48, 1050–1075. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Simakova, M.S.; Kulyanitsa, A.L.; Bryzzhev, A.V.; Koroleva, P.V.; Kalinina, N.V.; Vil’Chevskaya, E.V.; Dolinina, E.A.; Rukhovich, S.V. Impact of shelterbelts on the fragmentation of erosional networks and local soil waterlogging. Eurasian Soil Sci. 2014, 47, 1086–1099. [Google Scholar] [CrossRef]
- Bryzzhev, A.V.; Rukhovich, D.I.; Koroleva, P.V.; Kalinina, N.V.; Vilchevskaya, E.V.; Dolinina, E.A.; Rukhovich, S.V. Organization of retrospective monitoring of the soil cover of Rostov oblast. Eurasian Soil Sci. 2015, 48, 1029–1049. [Google Scholar] [CrossRef]
- Rukhovich, D.I.; Simakova, M.S.; Kulyanitsa, A.L.; Bryzzhev, A.V.; Koroleva, P.V.; Kalinina, N.V.; Vilchevskaya, E.V.; Dolinina, E.A.; Rukhovich, S.V. Analysis of the use of soil maps in the system of retrospective monitoring of the state of lands and soil cover. Pochvovedeniye 2015, 5, 605–625. (In Russian) [Google Scholar]
- Shapovalov, D.A.; Koroleva, P.V.; Kalinina, N.V.; Rukhovich, D.I.; Suleiman, G.A.; Dolinina, E.A. Differences in Inventories of Waterlogged Territories in Soil Surveys of Different Years and in Land Management Documents. Eurasian Soil Sci. 2020, 53, 294–309. [Google Scholar] [CrossRef]
- Xu, H.; Hu, X.; Guan, H.; Zhang, B.; Wang, M.; Chen, S.; Chen, M. A Remote Sensing Based Method to Detect Soil Erosion in Forests. Remote. Sens. 2019, 11, 513. [Google Scholar] [CrossRef] [Green Version]
- Phinzi, K.; Ngetar, N.S. Mapping soil erosion in a quaternary catchment in Eastern Cape using geographic information system and remote sensing. S. Afr. J. Geomat. 2017, 6, 11. [Google Scholar] [CrossRef] [Green Version]
- Eckert, S.; Hüsler, F.; Liniger, H.; Hodel, E. Trend analysis of MODIS NDVI time series for detecting land degradation and regeneration in Mongolia. J. Arid. Environ. 2015, 113, 16–28. [Google Scholar] [CrossRef]
- Ayalew, D.A.; Deumlich, D.; Šarapatka, B.; Doktor, D. Quantifying the Sensitivity of NDVI-Based C Factor Estimation and Potential Soil Erosion Prediction using Spaceborne Earth Observation Data. Remote Sens. 2020, 12, 1136. [Google Scholar] [CrossRef] [Green Version]
- De Carvalho, D.F.; Durigon, V.L.; Antunes, M.A.H.; De Almeida, W.S.; Oliveira, P.T.S. Predicting soil erosion using Rusle and NDVI time series from TM Landsat 5. Pesqui. Agropecu. Bras. 2014, 49, 215–224. [Google Scholar] [CrossRef] [Green Version]
- Yengoh, G.T.; Dent, D.; Olsson, L.; Tengberg, A.E.; Tucker, C.J. Limits to the Use of NDVI in Land Degradation Assessment. In Use of the Normalized Difference Vegetation Index (NDVI) to Assess Land Degradation at Multiple Scales; Springer Briefs in Environmental Science; Springer: Cham, Switzerland, 2015; pp. 27–30. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, Z.-X.; Yu, T.; Huang, X.-Z.; Gu, X.-F. Agricultural remote sensing big data: Management and applications. J. Integr. Agric. 2018, 17, 1915–1931. [Google Scholar] [CrossRef]
- EarthExplorer. Available online: http://earthexplorer.usgs.gov (accessed on 21 February 2022).
- Zi, Y.; Xie, F.; Jiang, Z. A Cloud Detection Method for Landsat 8 Images Based on PCANet. Remote Sens. 2018, 10, 877. [Google Scholar] [CrossRef] [Green Version]
- Zeng, X.; Yang, J.; Deng, X.; An, W.; Li, J. Cloud detection of remote sensing images on Landsat-8 by deep learning. In Proceedings of the Tenth International Conference on Digital Image Processing (ICDIP 2018), Shanghai, China, 9 August 2018; p. 108064Y. [Google Scholar] [CrossRef]
- Mateo-Garcia, G.; Gómez-Chova, L. Convolutional Neural Networks for Cloud Screening: Transfer Learning from Landsat-8 to Proba-V. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 2103–2106. [Google Scholar] [CrossRef]
- Shao, Z.; Pan, Y.; Diao, C.; Cai, J. Cloud Detection in Remote Sensing Images Based on Multiscale Features-Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4062–4076. [Google Scholar] [CrossRef]
- Openshaw, S. Geographical Data Mining: Key Design Issues. In Proceedings of the 4th International Conference on GeoComputation, Fredericksburg, VA, USA, 25–28 July 1999; Available online: http://www.geocomputation.org/1999/051/gc_051.htm (accessed on 21 February 2022).
- Hastie, T.J.; Tibshirani, R.; Friedman, J.H. The Elements of Statistical Learning: Data Mining, Inference, and Prediction, 2nd ed.; Springer Series in Statistics; Springer: New York, NY, USA, 2008; p. 763. [Google Scholar]
- Mo, H.; Sun, H.; Liu, J.; Wei, S. Developing window behavior models for residential buildings using XGBoost algorithm. Energy Build. 2019, 205, 109564. [Google Scholar] [CrossRef]
- Abdullah, A.Y.M.; Masrur, A.; Adnan, M.S.G.; Al Baky, A.; Hassan, Q.K.; Dewan, A. Spatio-temporal Patterns of Land Use/Land Cover Change in the Heterogeneous Coastal Region of Bangladesh between 1990 and 2017. Remote Sens. 2019, 11, 790. [Google Scholar] [CrossRef] [Green Version]
- Schneider dos Santos, R. Estimating spatio-temporal air temperature in London (UK) using machine learning and earth observation satellite data. Int. J. Appl. Earth Obs. 2020, 88, 102066. [Google Scholar]
- Li, W.; Fu, H.; Yu, L.; Cracknell, A. Deep Learning Based Oil Palm Tree Detection and Counting for High-Resolution Remote Sensing Images. Remote Sens. 2016, 9, 22. [Google Scholar] [CrossRef] [Green Version]
- Baeta, R.; Nogueira, K.; Menotti, D.; Dos Santos, J.A. Learning Deep Features on Multiple Scales for Coffee Crop Recognition. In Proceedings of the 2017 30th SIBGRAPI Conference on Graphics, Patterns and Images (SIBGRAPI), Niteroi, Brazil, 17–20 October 2017; pp. 262–268. [Google Scholar]
- Guirado, E.; Tabik, S.; Alcaraz-Segura, D.; Cabello, J.; Herrera, F. Deep-learning Versus OBIA for Scattered Shrub Detection with Google Earth Imagery: Ziziphus lotus as Case Study. Remote Sens. 2017, 9, 1220. [Google Scholar] [CrossRef] [Green Version]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep Learning Classification of Land Cover and Crop Types Using Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Nijhawan, R.; Sharma, H.; Sahni, H.; Batra, A. A Deep Learning Hybrid CNN Framework Approach for Vegetation Cover Mapping Using Deep Features. In Proceedings of the 2017 13th International Conference on Signal-Image Technology & Internet-Based Systems (SITIS), Niteroi, Brazil, 17–20 October 2017; pp. 192–196. [Google Scholar] [CrossRef]
- Petropoulos, G.P.; Vadrevu, K.; Xanthopoulos, G.; Karantounias, G.; Scholze, M. A Comparison of Spectral Angle Mapper and Artificial Neural Network Classifiers Combined with Landsat TM Imagery Analysis for Obtaining Burnt Area Mapping. Sensors 2010, 10, 1967–1985. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Padarian, J.; Minasny, B.; McBratney, A.B. Using deep learning for digital soil mapping. Soil 2019, 5, 79–89. [Google Scholar] [CrossRef] [Green Version]
- Meng, Q.; Zhang, L.; Xie, Q.; Yao, S.; Chen, X.; Zhang, Y. Combined Use of GF-3 and Landsat-8 Satellite Data for Soil Moisture Retrieval over Agricultural Areas Using Artificial Neural Network. Adv. Meteorol. 2018, 2018, 9315132. [Google Scholar] [CrossRef]
- Rai, A.K.; Mandal, N.; Singh, A.; Singh, K.K. Landsat 8 OLI Satellite Image Classification using Convolutional Neural Network. Procedia Comput. Sci. 2020, 167, 987–993. [Google Scholar] [CrossRef]
- Khan, M.S.; Semwal, M.; Sharma, A.; Verma, R.K. An artificial neural network model for estimating Mentha crop biomass yield using Landsat 8 OLI. Precis. Agric. 2020, 21, 18–33. [Google Scholar] [CrossRef]
- NEXT Farming: Smarte Lösungen für Landwirte. Available online: https://www.nextfarming.de/ (accessed on 21 February 2022).
- Shapovalov, D.A.; Koroleva, P.V.; Kalinina, N.V.; Vilchevskaya, E.V.; Kulyanitsa, A.L.; Rukhovich, D.I. ASF-index-a map of stable intra-field heterogeneity of soil cover fertility, based on big satellite data for precision agriculture tasks. Mejdunarodnyi Selskohozyaistvennyi J. 2020, 1, 9–15. [Google Scholar]
- ExactFarming. Available online: https://www.exactfarming.com/ru/ (accessed on 21 February 2022).
- Farmers Edge. Available online: https://www.farmersedge.ca/ru/ (accessed on 21 February 2022).
- Cropio. Available online: https://about.cropio.com/ru/ (accessed on 21 February 2022).
- Intterra. Available online: https://intterra.ru/ru (accessed on 21 February 2022).
- AGRO-SAT Consulting GmbH. Available online: http://agro-sat.de/ (accessed on 21 February 2022).
- Agronote. Available online: https://www.avgust.com/newspaper/topics/detail.php?ID=6860 (accessed on 21 February 2022).
- Unified Interdepartmental Information and Statistical System. State Statistics. Available online: https://fedstat.ru/indicator/31328 (accessed on 21 February 2022).
- Rukhovich, D.I.; Koroleva, P.V.; Vilchevskaya, E.V.; Kalinina, N.V. Digital thematic cartography as a change in the available primary sources and ways of using them. In Digital Soil Mapping: Theoretical and Experimental Studies; Ivanov, A.L., Sorokina, N.P., Savin, I.Y., Eds.; Dokuchaev Soil Science Institute: Moscow, Russia, 2012; pp. 58–86. [Google Scholar]
- USGS EROS Archive-Declassified Data-Declassified Satellite Imagery-1. Available online: https://www.usgs.gov/centers/eros/science/usgs-eros-archive-declassified-data-declassified-satellite-imagery-1?qt-science_center_objects=0#qt-science_center_objects (accessed on 21 February 2022).
- Kauth, R.J.; Thomas, G.S. The tasseled cap—A graphic description of the spectral-temporal development of agricultural crops as seen by LANDSAT. In Proceedings of the Symposium on Machine Processing of Remotely Sensed Data, West Lafayette, IN, USA, 29 June–1 July 1976; (A77-15051 04-43). Institute of Electrical and Electronics Engineers, Inc.: New York City, NY, USA, 1976; pp. 4B-41–4B-51. [Google Scholar]
- McCarty, J.L.; Ellicott, E.A.; Romanenkov, V.; Rukhovitch, D.; Koroleva, P. Multi-year black carbon emissions from cropland burning in the Russian Federation. Atmos. Environ. 2012, 63, 223–238. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS. In Proceedings of the Third ERTS Symposium, Washington, DC, USA, 10–14 December 1973; Scientific and Technical Information Office, NASA: Washington, DC, USA, 1974; Volume 1, pp. 309–317. [Google Scholar]
- Kohavi, R. A study of cross-validation and bootstrap for accuracy estimation and model selection. In Proceedings of the 14th International Joint Conference on Artificial Intelligence-Volume 2 (IJCAI’95), Montreal, QC, Canada, 20–25 August 1995; pp. 1137–1143. [Google Scholar]
- Mullin, M.; Sukthankar, R. Complete Cross-Validation for Nearest Neighbor Classifiers. In Proceedings of the Seventeenth International Conference on Machine Learning (ICML ’00), Stanford, CA, USA, 29 June–2 July 2000; pp. 639–646. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT press: Cambridge, MA, USA, 2016. [Google Scholar]
- Porzi, L.; Bulò, S.R.; Colovic, A.; Kontschieder, P. Seamless Scene Segmentation. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR); IEEE: New York, NY, USA, 2019; pp. 8269–8278. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Zhou, Z.; Rahman Siddiquee, M.M.; Tajbakhsh, N.; Liang, J. UNet++: A Nested U-Net Architecture for Medical Image Segmentation. In Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support; Stoyanov, D., Maier-Hein, L., Syeda-Mahmood, T., Taylor, Z., Lu, Z., Madabhushi, A., Nascimento, J.C., Moradi, M., Martel, A., Eds.; DLMIA: 2018, ML-CDS 2018, Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2018; Volume 11045, pp. 3–11. [Google Scholar]
- Liu, Y.; Zhu, Q.; Cao, F.; Chen, J.; Lu, G. High-Resolution Remote Sensing Image Segmentation Framework Based on Attention Mechanism and Adaptive Weighting. ISPRS Int. J. Geo-Inf. 2021, 10, 241. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, H.; Wang, P.; Ling, X. ATT Squeeze U-Net: A Lightweight Network for Forest Fire Detection and Recognition. IEEE Access 2021, 9, 10858–10870. [Google Scholar] [CrossRef]
- Sa, I.; Popović, M.; Khanna, R.; Chen, Z.; Lottes, P.; Liebisch, F.; Nieto, J.; Stachniss, C.; Walter, A.; Siegwart, R. WeedMap: A Large-Scale Semantic Weed Mapping Framework Using Aerial Multispectral Imaging and Deep Neural Network for Precision Farming. Remote Sens. 2018, 10, 1423. [Google Scholar] [CrossRef] [Green Version]
- Lottes, P.; Behley, J.; Milioto, A.; Stachniss, C. Fully Convolutional Networks with Sequential Information for Robust Crop and Weed Detection in Precision Farming. IEEE Robot. Autom. Lett. 2018, 3, 2870–2877. [Google Scholar] [CrossRef] [Green Version]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv 2015, arXiv:1502.03167v3. [Google Scholar]
- Jadon, S. A survey of loss functions for semantic segmentation. In Proceedings of the 2020 IEEE Conference on Computational Intelligence in Bioinformatics and Computational Biology (CIBCB), Santiago, Chile, 27–29 October 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. Available online: https://arxiv.org/abs/1412.6980 (accessed on 21 February 2022).
- Arnold, R.; Blume, H.P.; Bockheim, J.; Boyadgiev, T.; Bridges, E.; Brinkman, R.; Broll, G.; Bronger, A.; Constantini, E.; Creutzberg, D.; et al. World Reference Base for Soil Resources: IUSS Working Group WRB; Food and Agriculture Organization of the United Nations Rome: Rome, Italy, 1998. [Google Scholar]
- State Standard of the USSR 26213-91. Soils. Methods for Determination of Organic Matter. 1993. Available online: http://docs.cntd.ru/document/1200023481 (accessed on 21 February 2022).
- Walkley, A.J.; Black, I.A. Estimation of soil organic carbon by the chromic acid titration method. Soil Sci. 1934, 37, 29–38. [Google Scholar] [CrossRef]
- ArcGIS. Available online: https://www.esri.com/ru-ru/arcgis/about-arcgis/overview (accessed on 21 February 2022).
- Erdas Imagine. Available online: https://www.hexagongeospatial.com/products/power-portfolio/erdas-imagine (accessed on 21 February 2022).
- Chen, X.; Guo, Z.; Chen, J.; Yang, W.; Yao, Y.; Zhang, C.; Cui, X.; Cao, X. Replacing the Red Band with the Red-SWIR Band (0.74ρred + 0.26ρswir) Can Reduce the Sensitivity of Vegetation Indices to Soil Background. Remote Sens. 2019, 11, 851. [Google Scholar] [CrossRef] [Green Version]
- Unified State Register of Soil Resources of Russia. Available online: http://egrpr.soil.msu.ru/index.php (accessed on 21 February 2022).
- Soil Map of the Collective Farm Rodina, Morozovsky District, Rostov Region, Scale 1:25000; VISKHAGI Southern Branch: Novocherkassk, Russia, 1975.
- Pochvennyi institut imeni V.V. Dokuchaeva; Egorov, V.V. Classification and Diagnostics of Soils of the USSR (Russian Translations Series, 42); U.S. Department of Agriculture, The National Science Foundation: Washington, DC, USA, 1986.
- National Soil Atlas of the Russian Federation. Available online: https://soil-db.ru/soilatlas/razdel-3-pochvy-rossiyskoy-federacii/kashtanovye-i-temno-kashtanovye-pochvy-kashtanovye-i-temno-kashtanovye-micelyarno-karbonatnye-pochvy (accessed on 21 February 2022).
- Soil Map of Zernogradsky District, Rostov Region, Scale 1:100000; VISKHAGI Southern Branch: Novocherkassk, Russia, 1972.
- Tsvylev, E.M. (Ed.) Soil Map of Rostov Region, Scale 1:300 000; GUGK: Moscow, Russia, 1989. [Google Scholar]
- Rukhovich, D.I.; Koroleva, P.V.; Kalinina, N.V.; Vilchevskaya, E.V.; Simakova, M.S.; Dolinina, E.A.; Rukhovich, S.V. State soil map of the Russian federation: An ArcInfo version. Eurasian Soil Sci. 2013, 46, 225–240. [Google Scholar] [CrossRef]
- Chernousenko, G.I.; Kalinina, N.V.; Khitrov, N.B.; Pankova, E.I.; Rukhovich, D.I.; Yamnova, I.A.; Novikova, A.F. Quantification of the areas of saline and solonetzic soils in the Ural Federal Region of the Russian Federation. Eurasian Soil Sci. 2011, 44, 367–379. [Google Scholar] [CrossRef]
- Daliakopoulos, I.; Tsanis, I.; Koutroulis, A.; Kourgialas, N.; Varouchakis, A.; Karatzas, G.; Ritsema, C. The threat of soil salinity: A European scale review. Sci. Total Environ. 2016, 573, 727–739. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Wu, J.; Qian, H. Regulation of secondary soil salinization in semi-arid regions: A simulation research in the Nanshantaizi area along the Silk Road, northwest China. Environ. Earth Sci. 2016, 75, 1–12. [Google Scholar] [CrossRef]
- Nawar, S.; Buddenbaum, H.; Hill, J. Digital Mapping of Soil Properties Using Multivariate Statistical Analysis and ASTER Data in an Arid Region. Remote Sens. 2015, 7, 1181–1205. [Google Scholar] [CrossRef] [Green Version]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Rahmati, O.; Tahmasebipour, N.; Haghizadeh, A.; Pourghasemi, H.R.; Feizizadeh, B. Evaluation of different machine learning models for predicting and mapping the susceptibility of gully erosion. Geomorphology 2017, 298, 118–137. [Google Scholar] [CrossRef]
- Gong, C.; Lei, S.; Bian, Z.; Liu, Y.; Zhang, Z.; Cheng, W. Analysis of the Development of an Erosion Gully in an Open-Pit Coal Mine Dump During a Winter Freeze-Thaw Cycle by Using Low-Cost UAVs. Remote Sens. 2019, 11, 1356. [Google Scholar] [CrossRef] [Green Version]
- Vieira, A.S.; do Valle Junior, R.F.; Rodrigues, V.S.; da Silva Quinaia, T.L.; Mendes, R.G.; Valera, C.A.; Fernandes, L.F.S.; Pacheco, F.A.L. Estimating water erosion from the brightness index of orbital images: A framework for the prognosis of degraded pastures. Sci. Total Environ. 2021, 776, 146019. [Google Scholar] [CrossRef]
- Yuan, Q.; Shen, H.; Li, T.; Li, Z.; Li, S.; Jiang, Y.; Xu, H.; Tan, W.; Yang, Q.; Wang, J.; et al. Deep learning in environmental remote sensing: Achievements and challenges. Remote Sens. Environ. 2020, 241, 111716. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Pit | OM Content, % | Thickness of Humus Horizon, cm | Soil Number * | Presence of Degradation According to Ground Survey Based on: | Cmean | Soil Pit Belongs to the Degradation Area Based on Cmean Value | ||
|---|---|---|---|---|---|---|---|---|
| OM Content | OM Horizon | One of Two Signs | ||||||
| 1 | 2.6 | 31 | 4 | + | + | + | 0.269858 | + |
| 2 | 3.5 | 60 | 1 | - | - | - | 0.210424 | - |
| 3 | 2.7 | 39 | 3 | - | + | + | 0.235787 | - |
| 4 | 3.1 | 53 | 2 | - | - | - | 0.215998 | - |
| 5 | 2.8 | 47 | 2 | - | - | - | 0.228312 | - |
| 6 | 3.0 | 42 | 2 | - | - | - | 0.234865 | - |
| 7 | 2.8 | 36 | 3 | - | + | + | 0.235183 | - |
| 8 | 2.7 | 36 | 3 | - | + | + | 0.265439 | + |
| 9 | 2.3 | 29 | 4 | + | + | + | 0.268917 | + |
| 10 | 3.3 | 47 | 2 | - | - | - | 0.238082 | - |
| 11 | 3.2 | 54 | 1 | - | - | - | 0.217113 | - |
| 12 | 2.8 | 40 | 2 | - | - | - | 0.229126 | - |
| 13 | 1.8 | 27 | 4 | + | + | + | 0.298548 | + |
| 14 | 3.2 | 38 | 3 | - | + | + | 0.237733 | - |
| 15 | 1.8 | 25 | 5 | + | + | + | 0.288368 | + |
| 16 | 3.2 | 56 | 1 | - | - | - | 0.214088 | - |
| 17 | 1.5 | 25 | 5 | + | + | + | 0.289702 | + |
| 18 | 3.1 | 37 | 3 | - | + | + | 0.231722 | - |
| 19 | 2.9 | 39 | 3 | - | + | + | 0.232223 | - |
| 20 | 1.7 | 20 | 5 | + | + | + | 0.300192 | + |
| 21 | 3.4 | 44 | 2 | - | - | - | 0.224676 | - |
| 22 | 3.2 | 42 | 2 | - | - | - | 0.241021 | - |
| 23 | 3.0 | 51 | 2 | - | - | - | 0.227908 | - |
| 24 | 1.9 | 21 | 5 | + | + | + | 0.283136 | + |
| 25 | 2.5 | 37 | 3 | + | + | + | 0.240682 | - |
| 26 | 3.1 | 53 | 2 | - | - | - | 0.222253 | - |
| 27 | 2.1 | 31 | 4 | + | + | + | 0.257937 | + |
| 28 | 2.2 | 35 | 3 | + | + | + | 0.255329 | + |
| 29 | 2.8 | 36 | 3 | - | + | + | 0.245738 | + |
| 30 | 2.2 | 32 | 3 | + | + | + | 0.252331 | + |
| 31 | 2.7 | 41 | 2 | - | - | - | 0.248755 | + |
| 32 | 3.2 | 40 | 2 | - | - | - | 0.235532 | - |
| 33 | 2.8 | 43 | 2 | - | - | - | 0.239885 | - |
| 34 | 2.0 | 23 | 5 | + | + | + | 0.286224 | + |
| 35 | 2.5 | 33 | 3 | + | + | + | 0.264084 | + |
| 36 | 3.0 | 41 | 2 | - | - | - | 0.231409 | - |
| 37 | 3.5 | 52 | 2 | - | - | - | 0.226734 | - |
| 38 | 3.0 | 48 | 2 | - | - | - | 0.231922 | - |
| 39 | 3.0 | 40 | 2 | - | - | - | 0.231901 | - |
| 40 | 2.0 | 25 | 5 | + | + | + | 0.279424 | + |
| 41 | 2.3 | 29 | 4 | + | + | + | 0.265249 | + |
| 42 | 2.7 | 38 | 3 | - | + | + | 0.238856 | - |
| 43 | 2.0 | 22 | 5 | + | + | + | 0.290922 | + |
| 44 | 2.3 | 27 | 4 | + | + | + | 0.281172 | + |
| 45 | 2.0 | 27 | 4 | + | + | + | 0.272576 | + |
| 46 | 2.1 | 25 | 5 | + | + | + | 0.269552 | + |
| 47 | 3.1 | 47 | 2 | - | - | - | 0.234590 | - |
| 48 | 2.1 | 35 | 3 | + | + | + | 0.275097 | + |
| 49 | 3.3 | 53 | 2 | - | - | - | 0.236870 | - |
| 50 | 2.1 | 29 | 4 | + | + | + | 0.269566 | + |
| 51 | 2.3 | 30 | 4 | + | + | + | 0.266714 | + |
| 52 | 3.2 | 46 | 2 | - | - | - | 0.225910 | - |
| 53 | 3.0 | 49 | 2 | - | - | - | 0.224724 | - |
| 54 | 3.5 | 58 | 1 | - | - | - | 0.212186 | - |
| 55 | 3.0 | 42 | 2 | - | - | - | 0.235597 | - |
| 56 | 2.5 | 32 | 3 | + | + | + | 0.251919 | + |
| 57 | 2.5 | 39 | 3 | + | + | + | 0.246120 | + |
| 58 | 2.1 | 26 | 4 | + | + | + | 0.267368 | + |
| 59 | 2.6 | 38 | 3 | + | + | + | 0.250798 | + |
| 60 | 2.3 | 35 | 3 | + | + | + | 0.252240 | + |
| 61 | 2.4 | 39 | 3 | + | + | + | 0.251858 | + |
| 62 | 3.4 | 59 | 1 | - | - | - | 0.201962 | - |
| 63 | 3.3 | 58 | 1 | - | - | - | 0.213384 | - |
| 64 | 2.2 | 30 | 4 | + | + | + | 0.273555 | + |
| 65 | 3.1 | 42 | 2 | - | - | - | 0.228488 | - |
| 66 | 2.0 | 30 | 4 | + | + | + | 0.266775 | + |
| 67 | 3.1 | 44 | 2 | - | - | - | 0.226033 | - |
| 68 | 2.0 | 24 | 5 | + | + | + | 0.284077 | + |
| 69 | 3.3 | 51 | 2 | - | - | - | 0.238200 | - |
| 70 | 2.9 | 45 | 2 | - | - | - | 0.227276 | - |
| 71 | 2.5 | 31 | 4 | + | + | + | 0.255995 | + |
| 72 | 3.3 | 52 | 2 | - | - | - | 0.220846 | - |
| 73 | 2.3 | 32 | 3 | + | + | + | 0.256425 | + |
| 74 | 2.4 | 34 | 3 | + | + | + | 0.247516 | + |
| 75 | 3.1 | 45 | 2 | - | - | - | 0.237499 | - |
| 76 | 2.1 | 22 | 5 | + | + | + | 0.286072 | + |
| 77 | 1.6 | 19 | 5 | + | + | + | 0.296866 | + |
| 78 | 2.4 | 32 | 3 | + | + | + | 0.269443 | + |
| 79 | 2.2 | 24 | 5 | + | + | + | 0.275200 | + |
| 80 | 3.4 | 47 | 2 | - | - | - | 0.232959 | - |
| Soil Number | Soil Name | Cmean Range |
|---|---|---|
| 1 | meadow-chestnut | 0.200–0.220 |
| 2 | dark chestnut | 0.220–0.245 |
| 3 | dark chestnut slightly eroded | 0.245–0.260 |
| 4 | dark chestnut medium eroded | 0.260–0.275 |
| 5 | dark chestnut strongly eroded | 0.275–0.300 |
| Soils | Approximate Probabilities (p-Values) for Post Hoc Test * | ||||
|---|---|---|---|---|---|
| 1 Mean = 56.857 | 2 Mean = 44.152 | 3 Mean = 35.000 | 4 Mean = 29.769 | 5 Mean = 24.214 | |
| 1 | 0.000124 | 0.000123 | 0.000123 | 0.000123 | |
| 2 | 0.000124 | 0.000125 | 0.000123 | 0.000123 | |
| 3 | 0.000123 | 0.000125 | 0.017242 | 0.000123 | |
| 4 | 0.000123 | 0.000123 | 0.017242 | 0.009697 | |
| 5 | 0.000123 | 0.000123 | 0.000123 | 0.009697 | |
| Soils | Approximate Probabilities (p-Values) for Post Hoc Test * | ||||
|---|---|---|---|---|---|
| 1 Mean = 3.3143 | 2 Mean = 3.0545 | 3 Mean = 2.4231 | 4 Mean = 2.2769 | 5 Mean = 1.9286 | |
| 1 | 0.182848 | 0.000123 | 0.000123 | 0.000123 | |
| 2 | 0.182848 | 0.000123 | 0.000123 | 0.000123 | |
| 3 | 0.000123 | 0.000123 | 0.437679 | 0.000124 | |
| 4 | 0.000123 | 0.000123 | 0.437679 | 0.001194 | |
| 5 | 0.000123 | 0.000123 | 0.000124 | 0.001194 | |
| Soils | Total Number of Soil Pits in the Corresponding Interval of Cmean Values | Properly Defined Soil Varieties | Type I Errors (False Alarm) | Type II Errors (Omission of Target) | |||
|---|---|---|---|---|---|---|---|
| (Soil Pits Number) | % | (Soil Pits Number) | % | (Soil Pits Number) | % | ||
| 1. meadow-chestnut | 7 | 6 | 85.7 | 1 | 14.3 | 0 | 0.0 |
| 2. dark chestnut | 33 | 26 | 78.8 | 7 | 21.2 | 2 | 6.1 |
| 3. dark chestnut slightly eroded | 13 | 10 | 76.9 | 3 | 23.1 | 11 | 84.6 |
| 4. dark chestnut medium eroded | 13 | 9 | 69.2 | 4 | 30.8 | 4 | 30.8 |
| 5. dark chestnut strongly eroded | 14 | 11 | 78.6 | 3 | 21.4 | 1 | 7.1 |
| Sum of Squares | df | Mean Square | F | p-Value | F Crit | |
|---|---|---|---|---|---|---|
| Between groups | 5678.45 | 1 | 5678.45 | 146.31 | 1.42 × 10−19 | 3.96 |
| Within groups | 3027.35 | 78 | 38.81 | |||
| Total | 8705.80 | 79 |
| Sum of Squares | df | Mean Square | F | p-Value | F Crit | |
|---|---|---|---|---|---|---|
| Between groups | 16.11 | 1 | 16.11 | 219.31 | 2.27 × 10−24 | 3.96 |
| Within groups | 5.73 | 78 | 0.07 | |||
| Total | 21.84 | 79 |
| Degraded Soils Based on Cmean Value (Soil Pits Number) | Non-Degraded Soils Based on Cmean Value (Soil Pits Number) | Type I Errors (False Alarm) | Type II Errors (Omission of Target) | ||
|---|---|---|---|---|---|
| (Soil Pits Number) | % | (Soil pits Number) | % | ||
| 40 | 40 | 1 | 2.5 | 7 | 17.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rukhovich, D.I.; Koroleva, P.V.; Rukhovich, D.D.; Rukhovich, A.D. Recognition of the Bare Soil Using Deep Machine Learning Methods to Create Maps of Arable Soil Degradation Based on the Analysis of Multi-Temporal Remote Sensing Data. Remote Sens. 2022, 14, 2224. https://doi.org/10.3390/rs14092224
Rukhovich DI, Koroleva PV, Rukhovich DD, Rukhovich AD. Recognition of the Bare Soil Using Deep Machine Learning Methods to Create Maps of Arable Soil Degradation Based on the Analysis of Multi-Temporal Remote Sensing Data. Remote Sensing. 2022; 14(9):2224. https://doi.org/10.3390/rs14092224
Chicago/Turabian StyleRukhovich, Dmitry I., Polina V. Koroleva, Danila D. Rukhovich, and Alexey D. Rukhovich. 2022. "Recognition of the Bare Soil Using Deep Machine Learning Methods to Create Maps of Arable Soil Degradation Based on the Analysis of Multi-Temporal Remote Sensing Data" Remote Sensing 14, no. 9: 2224. https://doi.org/10.3390/rs14092224