
Monitoring Dropping Densities with Unmanned Aerial Vehicles (UAV): An Effective Tool to Assess Distribution Patterns in Field Utilization by Foraging Geese
 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
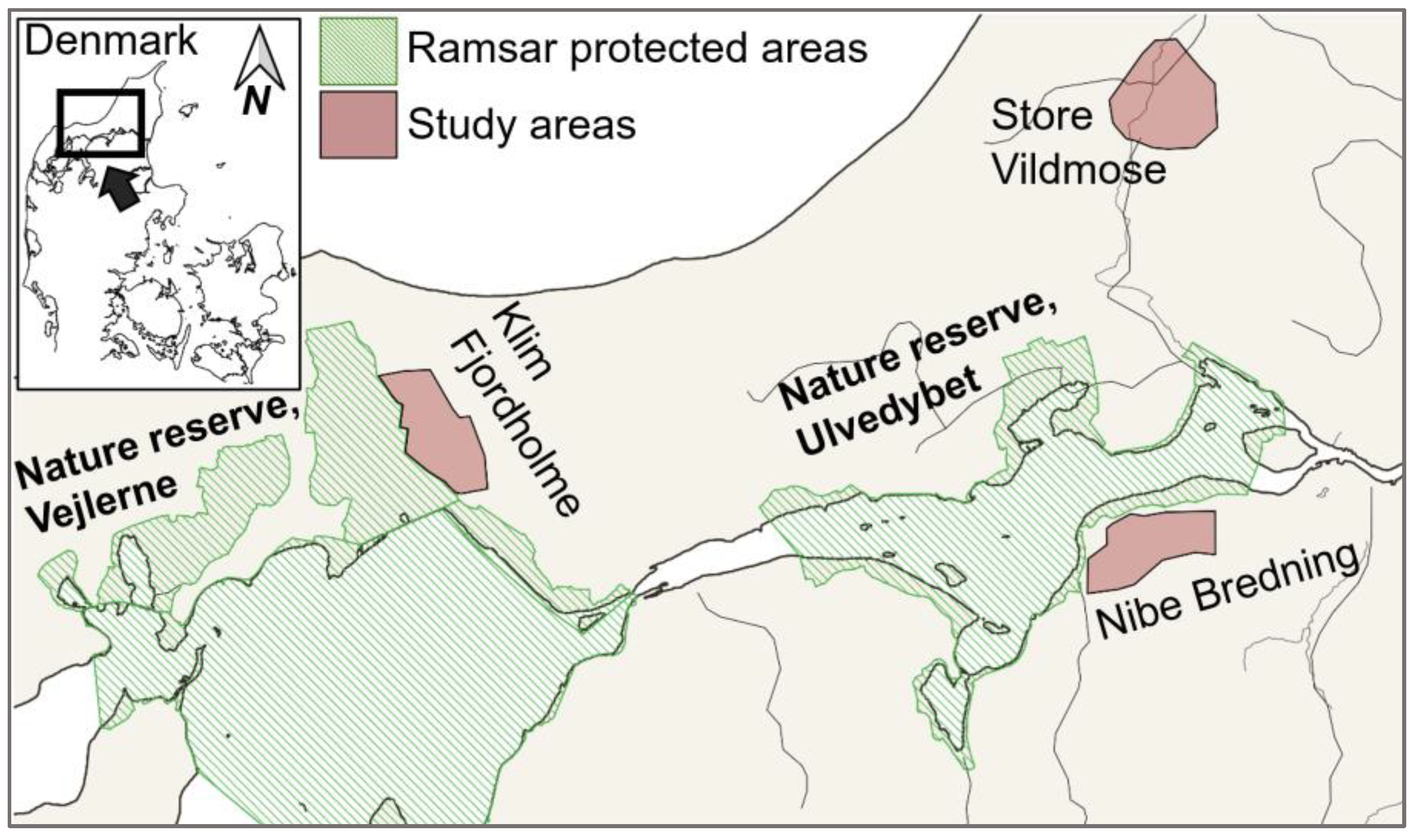
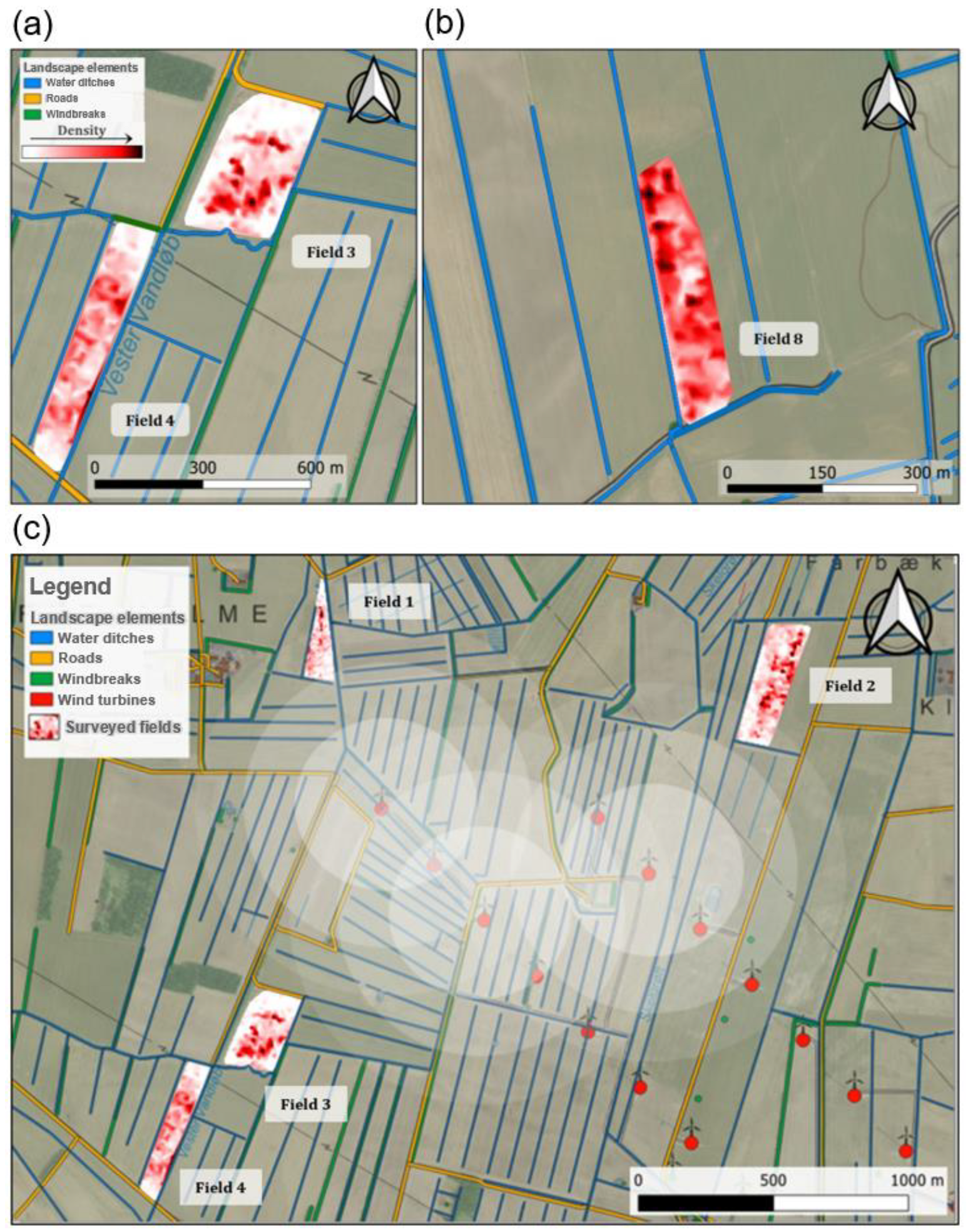
2.1. Study Area
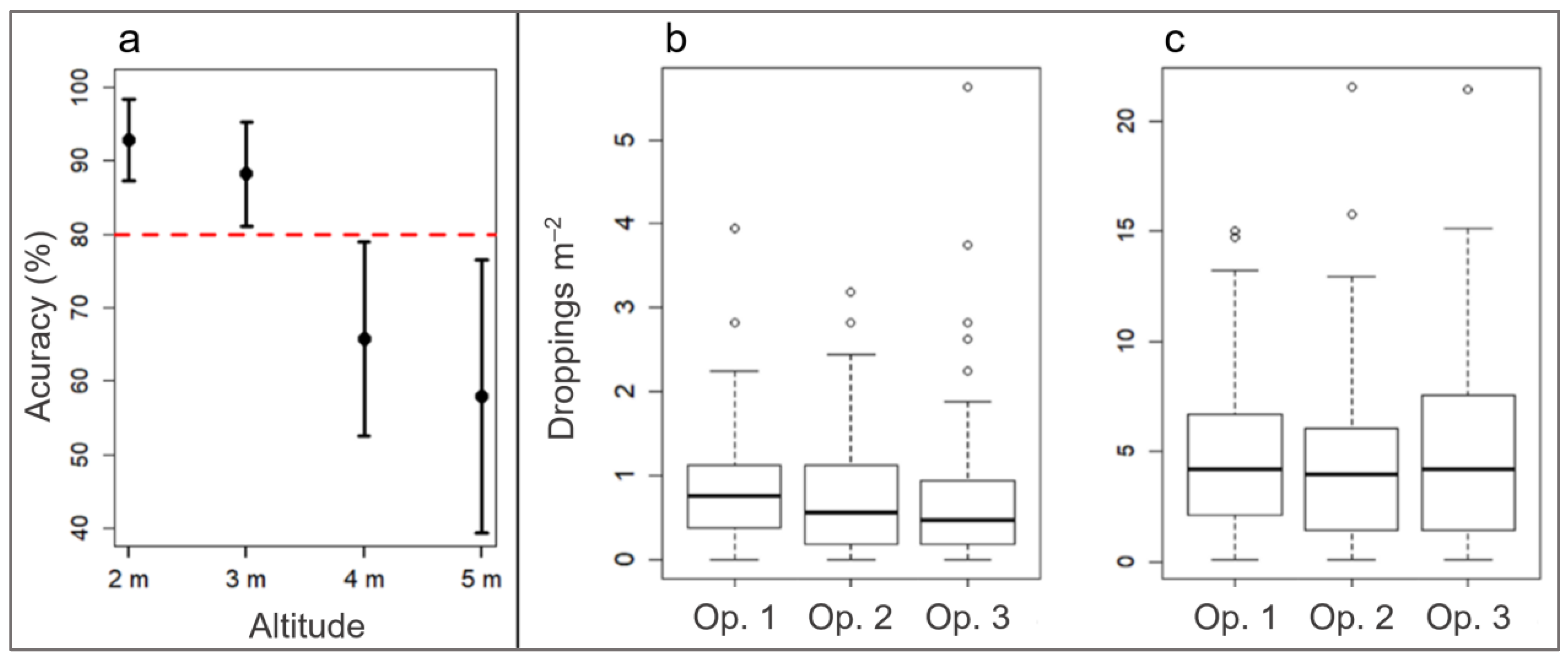
2.2. Maximum Flying Altitude
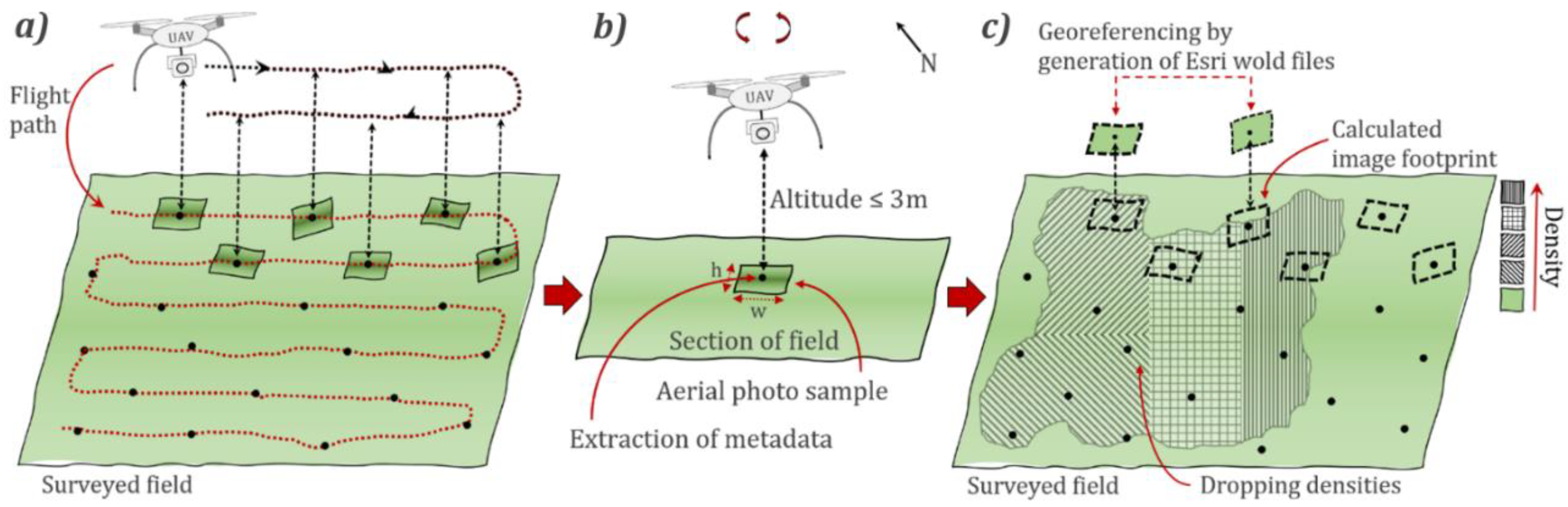
2.3. Data Collection
2.4. General Precision of Dropping Counts
2.5. Revised Georeferencing Workflow
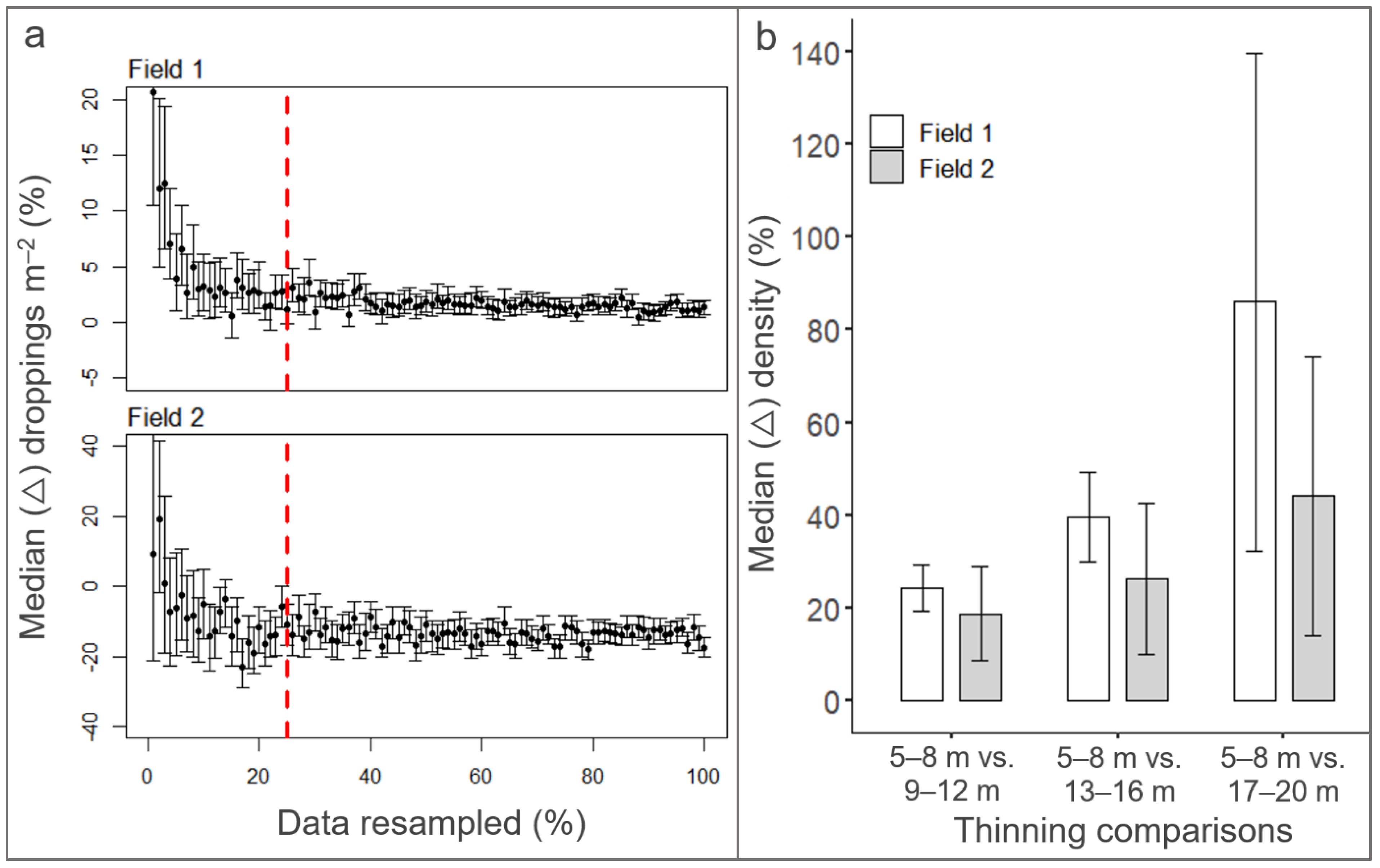
2.6. Sampling Frequency
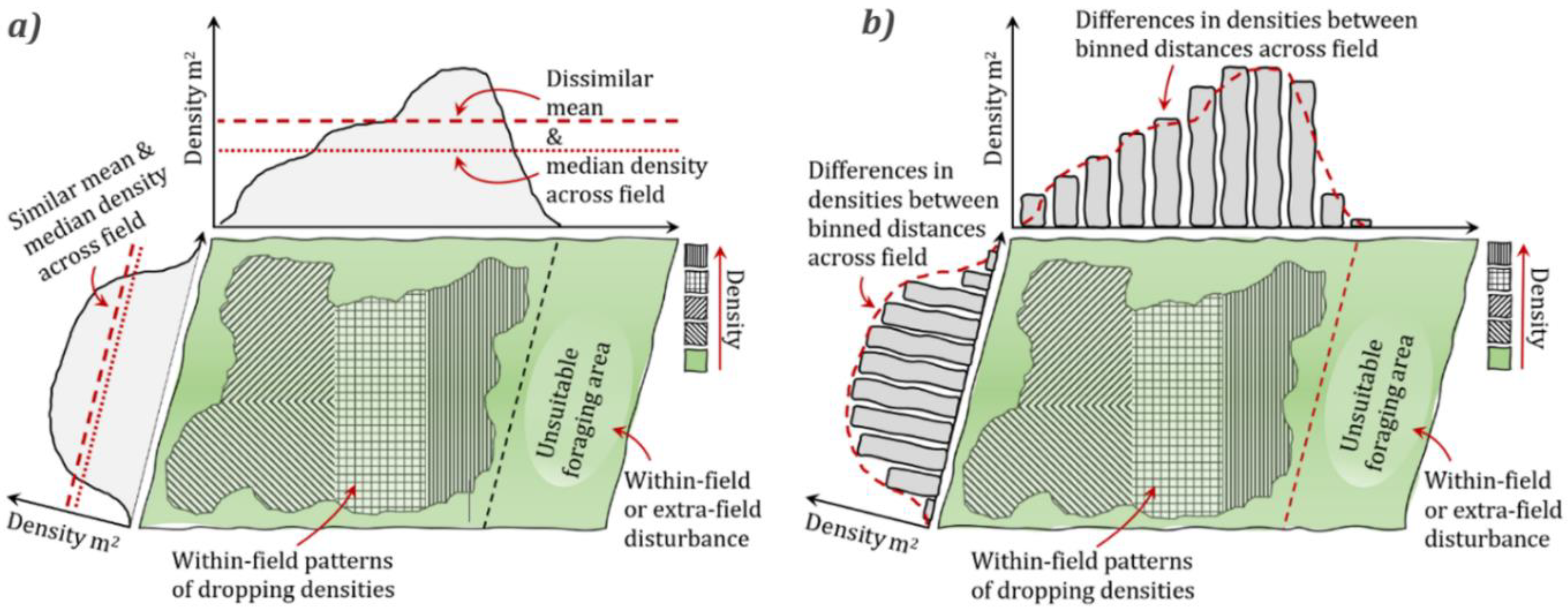
2.7. Analysis of Dropping Densities and Distribution Patterns
3. Results
3.1. Maximum Flying Altitude
3.2. General Precision of Dropping Counts
3.3. Revised Georeferencing of Aerial Photos
3.4. Sample Frequency of Aerial Photos
3.5. Dropping Density and Distribution Patterns
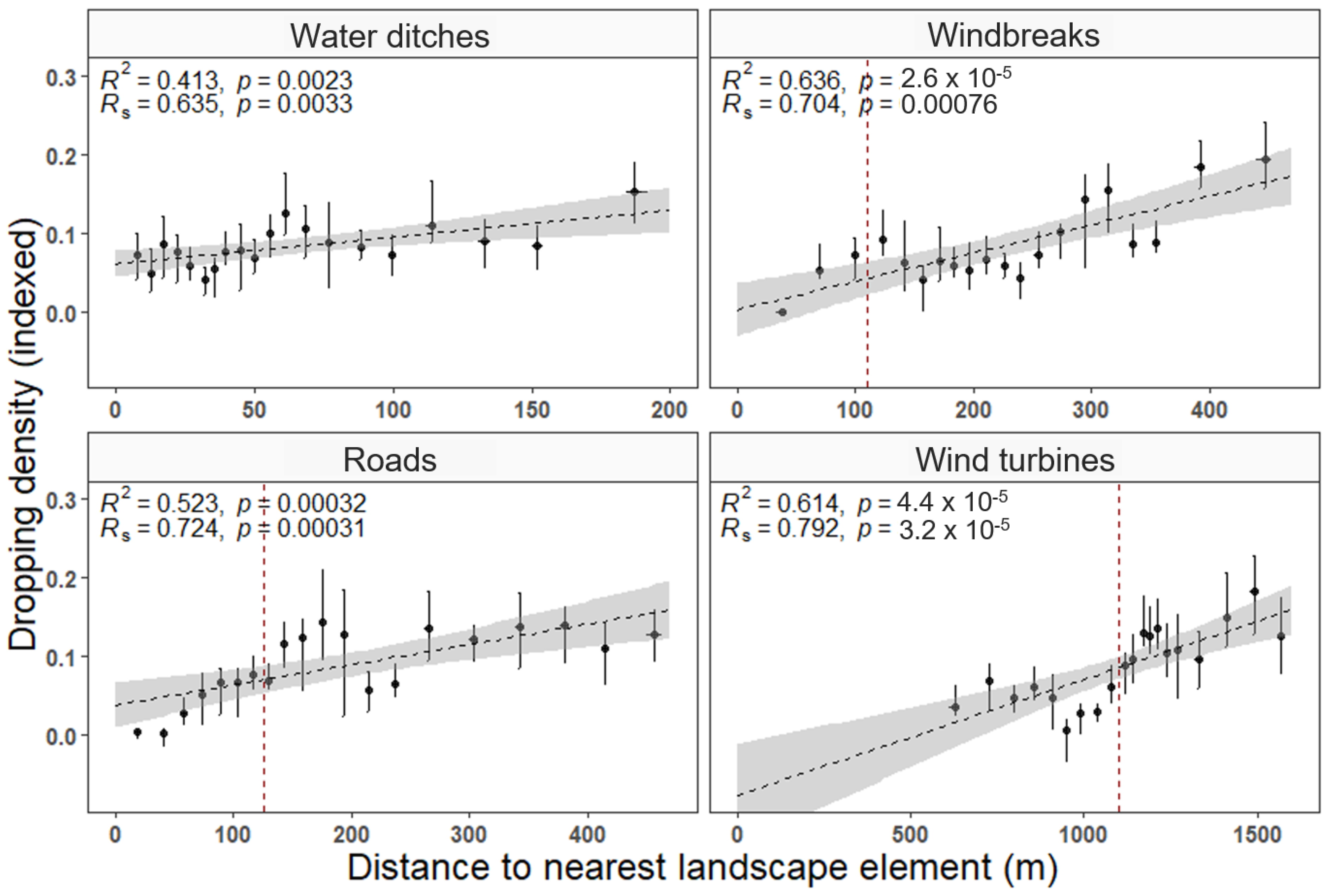
3.6. Avoidance Distances to Landscape Elements
4. Discussion
4.1. Detection of Droppings from Foraging Geese by UAV Imaging
4.2. Successful Establishment of Revised Georeferencing Workflow
4.3. Optimal Sampling Frequencies
4.4. Assessment of Distribution Patterns and Avoidance Distances
4.5. Fields of Application
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Madsen, J.; Roland, O.; Fox, T. Indspil Til Forvaltning af Bramgås, Aarhus University; DCE—Danish Centre for Environment and Energy: Aarhus, Denmark, 2015; pp. 1–18. [Google Scholar]
- Madsen, J.; Cottaar, F.; Amstrup, O.; Asfergi, T.; Bak, M.; Bakken, J.; Frikke, J.; Goma, V.; Gundersen, O.M.; Günther, K.; et al. SVALBARD PINK-FOOTED GOOSE, Aarhus University; DCE—Danish Centre for Environment and Energy: Aarhus, Denmark, 2016; pp. 5–13. [Google Scholar]
- Chudzińska, M.E.; Van Beest, F.M.; Madsen, J.; Nabe-Nielsen, J. Using habitat selection theories to predict the spatiotemporal distribution of migratory birds during stopover—A case study of pink-footed geese Anser brachyrhynchus. Oikos 2015, 124, 851–860. [Google Scholar] [CrossRef] [Green Version]
- Larsen, J.K.; Madsen, J. Effects of wind turbines and other physical elements on field utilization by pink-footed geese (Anser brachyrhynchus): A landscape perspective. Landsc. Ecol. 2000, 15, 755–764. [Google Scholar] [CrossRef]
- Harrison, A.L.; Petkov, N.; Mitev, D.; Popgeorgiev, G.; Gove, B.; Hilton, G.M. Scale-dependent habitat selection by wintering geese: Implications for landscape management. Biodivers. Conserv. 2017, 27, 167–188. [Google Scholar] [CrossRef]
- Bech-Hansen, M.; Kallehauge, R.M.; Bruhn, D.; Castenschiold, J.H.F.; Gehrlein, J.B.; Laubek, B.; Jensen, L.F.; Pertoldi, C. Effect of Landscape Elements on the Symmetry and Variance of the Spatial Distribution of Individual Birds within Foraging Flocks of Geese. Symmetry 2019, 11, 1103. [Google Scholar] [CrossRef] [Green Version]
- Fox, A.D.; Elmberg, J.; Tombre, I.M.; Hessel, R. Agriculture and herbivorous waterfowl: A review of the scientific basis for improved management. Biol. Rev. 2017, 92, 854–877. [Google Scholar] [CrossRef]
- Tombre, I.M.; Høgda, K.A.; Madsen, J.; Griffin, L.R.; Kuijken, E.; Shimmings, P.; Rees, E.; Verscheure, C. The onset of spring and timing of migration in two arctic nesting goose populations: The pink-footed goose Anser bachyrhynchus and the barnacle goose Branta leucopsis. J. Avian Biol. 2008, 39, 691–703. [Google Scholar] [CrossRef]
- Bibby, C.; Burgess, N.; Hill, D.; Mustoe, S. Bird Census Techniques; Academic Press: London, UK, 2000; ISBN 0-12-095831-7. [Google Scholar]
- Rosenstock, S.S.; Anderson, D.R.; Giesen, K.M.; Carter, M.F. Landbird Counting Techniques: Current Practices and an Alternative. Auk 2012, 119, 46–53. [Google Scholar] [CrossRef]
- Burnham, K.P.; Anderson, D.R.; Laake, J.L. Estimation of Density from Line Transect Sampling of Biological Populations. J. R. Stat. Soc. Ser. A 1980, 144, 369. [Google Scholar] [CrossRef]
- Frikke, J.; Laursen, K. Rastende vandfugle i Vadehavet 1980–2010. Dansk Ornitol. Foren. Tidsskr. 2013, 1, 4–26. [Google Scholar]
- Laursen, K.; Frikke, J.; Kahlert, J. Accuracy of ‘total counts’ of waterbirds from aircraft in coastal waters. Wildlife Biol. 2008, 14, 165–175. [Google Scholar] [CrossRef] [Green Version]
- Kempf, N.; Günther, K.; Fritz, V. Rastvögel auf Sandinseln im schleswig-holsteinischen Wattenmeer im Mai und September 2012. Die Vogelwelt 2015, 135, 167–183. [Google Scholar]
- Sardá-Palomera; Bota, F.; Viñolo, G.; Pallarés, O.; Sazatornil, V.; Brotons, L.; Gomáriz, S.; Sadra, F.; Sardà-Palomera, F.; Bota, G.; et al. Fine-scale bird monitoring from light unmanned aircraft systems. Ibis 2012, 154, 177–183. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Baylis, S.M.; Mott, R.; Herrod, A.; Clarke, R.H. Precision wildlife monitoring using unmanned aerial vehicles. Sci. Rep. 2016, 6, 22574. [Google Scholar] [CrossRef] [Green Version]
- Christie, K.S.; Gilbert, S.L.; Brown, C.L.; Hatfield, M.; Hanson, L. Unmanned aircraft systems in wildlife research: Current and future applications of a transformative technology. Front. Ecol. Environ. 2016, 14, 241–251. [Google Scholar] [CrossRef]
- Wirsing, A.J.; Johnston, A.N.; Kiszka, J.J. Foreword to the Special Issue on “The rapidly expanding role of drones as a tool for wildlife research”. Wildl. Res. 2022, 49, I–V. [Google Scholar] [CrossRef]
- Madsen, J. Relations between Change in Spring Habitat Selection and Daily Energetics of Pink-Footed Geese Anser brachyrhynchus. Ornis Scand. (Scandinavian J. Ornithol.) 1985, 16, 222–228. [Google Scholar] [CrossRef]
- Ransom, D.; Pinchak, W.E.; Ransom, D.; Pinchak, W.E. Assessing accuracy of a laser rangefinder in estimating grassland bird density. Wildl. Soc. Bull. 2019, 31, 460–463. [Google Scholar]
- Brennan, A.; Block, W.M.; Gutiérrez, R.J. Habitat use by mountain quail in Northern California. Condor 1987, 89, 66–74. [Google Scholar] [CrossRef]
- Sasse, D.B. Job-related mortality of wildlife workers in the United States, 1937–2000. Wildl. Soc. Bull. 2003, 31, 1015–1020. [Google Scholar] [CrossRef]
- McEvoy, J.F.; Hall, G.P.; McDonald, P.G. Evaluation of unmanned aerial vehicle shape, flight path and camera type for waterfowl surveys: Disturbance effects and species recognition. PeerJ 2016, 4, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, L.-M. Optællinger af Kolonirugende Fugle pa Fotos Optaget Med Drone Ved SNEUM Engsø, pa Langli og Holme i Limfjorden Maj 2017; Aarhus University, Institut for Bioscience: Copenhagen, Denmark, 2017. [Google Scholar]
- Bech-Hansen, M.; Kallehauge, R.M.; Lauritzen, J.M.S.; Sørensen, M.H.; Laubek, B.; Jensen, L.F.; Pertoldi, C.; Bruhn, D. Evaluation of disturbance effect on geese caused by an approaching unmanned aerial vehicle. Bird Conserv. Int. 2019, 30, 1–7. [Google Scholar] [CrossRef]
- Hong, S.J.; Han, Y.; Kim, S.Y.; Lee, A.Y.; Kim, G. Application of Deep-Learning Methods to Bird Detection Using Unmanned Aerial Vehicle Imagery. Sensors 2019, 19, 1651. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mamm. Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Valle, R.G.; Scarton, F. Drone-conducted counts as a tool for the rapid assessment of productivity of Sandwich Terns (Thalasseus sandvicensis). J. Ornithol. 2021, 162, 621–628. [Google Scholar] [CrossRef]
- Marchowski, D. Drones, automatic counting tools, and artificial neural networks in wildlife population censusing. Ecol. Evol. 2021, 11, 16214–16227. [Google Scholar] [CrossRef] [PubMed]
- Hughes, A.; Teuten, E.; Starnes, T.; Cowie, N.; Swinfield, T.; Humpidge, R.; Williams, J.; Bridge, D.; Casey, C.; Asque, A.; et al. Drones for GIS—Best Practice; version 2; Royal Society for the Protection of Birds Conservation: Edinburgh, UK, 2020.
- Gotovac, D.; Kružić, S.; Gotovac, S.; Papić, V. A model for automatic geomapping of aerial images mosaic acquired by UAV. 2017 2nd Int. Multidiscip. Conf. Comput. Energy Sci. Split. 2017, 2017, 1–6. [Google Scholar]
- Corcoran, E.; Winsen, M.; Sudholz, A.; Hamilton, G. Automated detection of wildlife using drones: Synthesis, opportunities and constraints. Methods Ecol. Evol. 2021, 12, 1103–1114. [Google Scholar] [CrossRef]
- Vas, E.; Lescroël, A.; Duriez, O.; Boguszewski, G.; Grémillet, D. Approaching birds with drones: First experiments and ethical guidelines. Biol. Lett. 2015, 11, 201407. [Google Scholar] [CrossRef] [Green Version]
- Mulero-Pázmány, M.; Jenni-Eiermann, S.; Strebel, N.; Sattler, T.; Negro, J.J.; Tablado, Z. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review. PLoS ONE 2017, 12, e0178448. [Google Scholar] [CrossRef] [Green Version]
- Owen, M. The Selection of Feeding Site by White-Fronted Geese in Winter. J. Appl. Ecol. 1971, 8, 905–917. [Google Scholar] [CrossRef]
- Koester, V. The Ramsar Convention. In The Ramsar Convention On the Conservation of Wetlands; Ramsar Convention Bureau International Union for Conservation of Nature and Natural Resources: Gland, Switzerland, 1989; pp. 1–15. ISBN 8750374036. [Google Scholar]
- Fox, A.D.; Ebbinge, B.S.; Mitchell, C.; Heinicke, T.; Aarvak, T.; Colhoun, K.; Clausen, P.; Dereliev, S.; Faragö, S.; Koffijberg, K.; et al. Current estimates of goose population sizes in western Europe, a gap analysis and an assessment of trends. Ornis Svecica 2010, 20, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Kjeldsen, J.P. Nordjyllands Fugle 2017. Available online: http://nordjyllandsfugle.dk/ (accessed on 10 July 2022).
- DJI PHANTOM 4 PRO Specs. Available online: https://www.dji.com/dk/phantom-4-pro/info#specs (accessed on 1 November 2021).
- Barr, J.R.; Green, M.C.; DeMaso, S.J.; Hardy, T.B. Drone Surveys Do Not Increase Colony-wide Flight Behaviour at Waterbird Nesting Sites, But Sensitivity Varies Among Species. Sci. Rep. 2020, 10, 3781. [Google Scholar] [CrossRef] [Green Version]
- Castenschiold, J.H.F.; Bregnballe, T.; Bruhn, D.; Pertoldi, C. Unmanned Aircraft Systems as a Powerful Tool to Detect Fine-Scale Spatial Positioning and Interactions between Waterbirds at High-Tide Roosts. Animals 2022, 12, 947. [Google Scholar] [CrossRef] [PubMed]
- Shapiro, S.S.; Wilk, M.B. An Analysis of Variance Test for Normality (Complete Samples). Biometrika 1965, 52, 591–611. [Google Scholar] [CrossRef]
- Shanks, A.M.; Hutton, J.C. Bartlett’s Test. Work. Pap. 1986, 8, 1–5. [Google Scholar]
- Davis, J. Mapping with the Phantom 3 Professional & Pix4Dcapture; Institute for Geographic Information Science, San Francisco State University: San Francisco, CA, USA, 2019. [Google Scholar]
- Kruskal, W.H.; Wallis, W.A. Use of Ranks in One-Criterion Variance Analysis Stable. J. Am. Stat. Assoc. 1952, 47, 583–621. [Google Scholar] [CrossRef]
- Hawkins, S. Using a drone and photogrammetry software to create orthomosaic images and 3D models of aircraft accident sites. In Proceedings of the Isasi Seminar, Reykjavik, Iceland, 17–20 October 2016; pp. 1–26. [Google Scholar]
- Hemerly, E.M. Automatic georeferencing of images acquired by UAV’s. Int. J. Autom. Comput. 2014, 11, 347–352. [Google Scholar] [CrossRef] [Green Version]
- Esri FAQ: What Is the Format of the World File Used for Georeferencing Images? Available online: https://support.esri.com/en/technical-article/000002860. (accessed on 1 April 2022).
- DiCiccio, T.J.; Efron, B. Bootstrap Confidence Intervals. Stat. Sci. 1996, 11, 189–228. [Google Scholar] [CrossRef]
- Flater, M.D. R Package ‘bootBCa.’: Function to Find Nonparametric BCa Intervals, Version 1.0. 2014. Available online: https://www.nist.gov/system/files/documents/itl/ssd/cs/bootBCa-manual.pdf (accessed on 10 July 2022).
- R Development Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2022. [Google Scholar]
- Fowler, J.; Cohen, L.; Jarvis, P. Probabillity Distributions as Models of Dispersion. In Practical Statistics for Field Biology; John Wiley & Sons: Hoboken, NJ, USA, 1998; pp. 62–73. ISBN 0-471-98296-2. [Google Scholar]
- D’Agostino, R.B.; Belanger, A.; D’Agostino, R.B., Jr. A suggestion for using powerful and informative tests of normality. Am. Stat. 1990, 44, 316–321. [Google Scholar]
- Anscombe, F.J.; Glynn, W.J. Distribution of the kurtosis statistic b2 for normal statistics. Biometrika 1983, 70, 227–234. [Google Scholar] [CrossRef]
- SDFE Styrelsen for Dataforsyning og Effektivisering. Available online: https://kortforsyningen.dk/content/fot-via-kortforsyningen (accessed on 22 May 2022).
- GeoDanmark FOTspecifikation Version 5.1. Available online: http://geodanmark.nu/onewebmedia/DKPDFSpec6-Alt_B4.pdf (accessed on 10 July 2022).
- Danish Meteorological Institute (DMI) Rekordvåd Marts 2019. Available online: https://www.dmi.dk/nyheder/2019/rekordvaad-marts-2019/ (accessed on 15 March 2022).
- Podhrázská, J.; Uhlĺřová, J.; Hejduk, S. Evaluation of crop effects on runoff and washout of soil from the surface of agricultural land. Soil Water Res. 2009, 4, 142–148. [Google Scholar] [CrossRef] [Green Version]
- Harrison, A.L.; Hilton, G.M. Fine-scale distribution of geese in relation to key landscape elements in coastal Dobrudzha, Bulgaria. Prelim. Rep. WWT Slimbr. 2014, 28. [Google Scholar]
- Gill, J.A. Habitat Choice in Pink-Footed Geese: Quantifying the Constraints Determining Winter Site Use. J. Appl. Ecol. 1996, 33, 884–892. [Google Scholar] [CrossRef]
- Laursen, K.; Kahlert, J.; Frikke, J. Factors affecting escape distances of staging waterbirds. Wildlife Biol. 2005, 11, 13–19. [Google Scholar] [CrossRef] [Green Version]
- Achermann, C. Vindmøller ved Klim Fjordholme; Jammerbugt Kommune: Aabybro, Denmark, 2012. [Google Scholar]
- Biswas, S.R.; Xiang, J.; Li, H. Disturbance Effects on Spatial Autocorrelation in Biodiversity: An Overview and a Call for Study. Diversity 2021, 13, 167. [Google Scholar] [CrossRef]
- Rasband, S. ImageJ, U.S. National Institutes of Health, Bethesda, Maryland, USA. Available online: https://imagej.nih.gov/ij/ (accessed on 10 July 2022).
- Bansemer, S.; Scheel, T. GSA Image Analyser; GSA GmbH: Rostock, Germany, 2022. [Google Scholar]
- Kaye, T.G.; Pittman, M. Fluorescence-based detection of field targets using an autonomous unmanned aerial vehicle system. Methods Ecol. Evol. 2020, 11, 890–898. [Google Scholar] [CrossRef]
- Kellie, A.; Dain, S.J.; Banks, P.B. Ultraviolet properties of Australian mammal urine. J. Comp. Physiol. A Neuroethol. Sens. Neural Behav. Physiol. 2004, 190, 429–435. [Google Scholar] [CrossRef] [PubMed]
- Smith, S.L.; Hagedorn, C.; Fisher, J.A.; McDonald, J.L.; Hartel, P.G.; Mantripragada, N.S.; Dickerson, J.W.; Belcher, C.N.; Gentit, L.C.; Saluta, M.A.; et al. Exposing water samples to ultraviolet light improves fluorometry for detecting human fecal contamination. Water Res. 2007, 41, 3629–3642. [Google Scholar] [CrossRef]
- Harvey, P. ExifTool Tag Names. Available online: http://owl.phy.queensu.ca/~phil/exiftool/TagNames/index.html (accessed on 10 July 2022).
- Pix4Dcapture Ground Sampling Distance (GSD). Available online: https://support.pix4d.com/hc/en-us/articles/202560249-TOOLS-GSD-calculator (accessed on 10 July 2022).
- Pix4Dcapture Camera Data Sheet. Available online: https://www.pix4d.com/product/pix4dmapper-photogrammetry-software (accessed on 10 July 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field (No.) | Area (ha) | Ph. Samp. (n) | Dropping Density (M) | Dropping Density () | Dispersion Index (s2/) | Chi-Square (x2) | Skewness (Sign.) | Kurtosis (Sign.) |
|---|---|---|---|---|---|---|---|---|
| 1 (test field) | 2.7 | 106 | 0.31 [0.11; 0.50] | 0.77 [0.58; 0.97] | 1.38 | 144.90 | 1.82 (***) | 6.59 (**) |
| 2 (test field) | 8.1 | 340 | 4.48 [3.99; 4.97] | 6.77 [6.24; 7.22] | 9.31 | 3156.36 | 2.89 (***) | 14.80 (***) |
| 3 | 3.3 | 215 | 1.01 [0.75; 1.28] | 1.88 [1.61; 2.14] | 2.93 | 884.48 | 2.01 (***) | 7.43 (***) |
| 4 | 7.8 | 282 | 0.60 [0.31; 0.89] | 1.59 [1.30; 1.89] | 2.94 | 629.19 | 1.95 (***) | 6.89 (***) |
| 5 | 3.9 | 155 | 0.15 [0.05; 0.26] | 0.56 [0.45; 0.66] | 1.46 | 410.32 | 2.14 (***) | 7.47 (***) |
| 6 | 5.0 | 181 | 1.19 [1.01; 1.36] | 1.53 [1.36; 1.71] | 0.80 | 122.76 | 0.78 (*) | 2.85 (ns) |
| 7 | 2.8 | 108 | 1.69 [1.42; 1.97] | 2.22 [1.95; 2.50] | 1.62 | 292.31 | 1.67 (***) | 5.91 (*) |
| 8 | 3.8 | 117 | 0.51 [0.39; 0.64] | 0.67 [0.58; 0.82] | 0.61 | 65.09 | 2.03 (***) | 8.45 (***) |
| 9 | 5.4 | 302 | 0.91 [0.43; 1.40] | 1.79 [1.31; 2.27] | 3.94 | 457.25 | 3.60 (***) | 18.88 (***) |
| 10 | 15.2 | 717 | 0.65 [0.52; 0.78] | 1.30 [1.17; 1.42] | 2.35 | 1682.77 | 2.27 (***) | 9.80 (***) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castenschiold, J.H.F.; Gehrlein, J.B.; Bech-Hansen, M.; Kallehauge, R.M.; Pertoldi, C.; Bruhn, D. Monitoring Dropping Densities with Unmanned Aerial Vehicles (UAV): An Effective Tool to Assess Distribution Patterns in Field Utilization by Foraging Geese. Symmetry 2022, 14, 2175. https://doi.org/10.3390/sym14102175
Castenschiold JHF, Gehrlein JB, Bech-Hansen M, Kallehauge RM, Pertoldi C, Bruhn D. Monitoring Dropping Densities with Unmanned Aerial Vehicles (UAV): An Effective Tool to Assess Distribution Patterns in Field Utilization by Foraging Geese. Symmetry. 2022; 14(10):2175. https://doi.org/10.3390/sym14102175
Chicago/Turabian StyleCastenschiold, Johan H. Funder, Jonas Beltoft Gehrlein, Mads Bech-Hansen, Rune M. Kallehauge, Cino Pertoldi, and Dan Bruhn. 2022. "Monitoring Dropping Densities with Unmanned Aerial Vehicles (UAV): An Effective Tool to Assess Distribution Patterns in Field Utilization by Foraging Geese" Symmetry 14, no. 10: 2175. https://doi.org/10.3390/sym14102175