
Correction Algorithm of Tennis Dynamic Image Serving Path Based on Symmetric Algorithm
1
School of Physical Education, Hunan University of Science and Technology, Xiangtan 411201, China
2
School of Physical Education, Changsha University of Science and Technology, Changsha 410076, China
*
Author to whom correspondence should be addressed.
Symmetry 2022, 14(9), 1833; https://doi.org/10.3390/sym14091833
Submission received: 8 April 2022
/
Revised: 23 August 2022
/
Accepted: 25 August 2022
/
Published: 4 September 2022
Abstract
:The existing target tracking algorithm of the tennis dynamic image serving path cannot correct the serving path in time according to the physical characteristics of the target, resulting in poor correction accuracy and stability. To this end, this paper proposes correction algorithm of tennis dynamic image serving path based on symmetric algorithm. Dynamic images are obtained using the visual acquisition model. On this basis, the contour of the moving target is obtained by the symmetric algorithm, and the complete moving target is obtained by the background difference method. The physical properties of moving objects are analyzed through a tennis serve visual model. The path correction model based on physical features is used to construct the relevant model so as to realize the path correction of the moving target. The experimental results show that the highest accuracy of the algorithm for tennis net and bottom line is 92.88% and 93.10%, respectively, and the average image correction accuracy is 95%. The tracking accuracy of service paths in complex backgrounds is 95%. These data show that the proposed algorithm has high correction accuracy and stability.
1. Introduction
Modern tennis, as a beautiful and intense sport, was born in the 19th century in the United Kingdom. Today, it is popular around the world and is known as the world’s second largest ball sport [1]. Tennis serve, a difficult technique to master, plays a key role in the tennis game. The serve is only good in the teeing ground. Grasping the serve of tennis is of great significance to improving the performance of the game. It has been mentioned in reference [2] that tennis serve does not depend on the absolute control of the server but is dynamic in the whole process. It can be regarded as a sports system, and athletes should pursue comprehensive and coordinated effects in the process of serving. In the process of service training, the athletes should give priority to coordinating their own strength, so that they can play a leading role in the service process. The tennis athlete should integrate his or her body to move along the vertical line, use the whole strength, pay attention to the consistency of service and follow-up action, improve the efficiency of serving, and minimize the energy consumption. In this paper, a studyon tennis serve is carried out.
With the development of computer image processing technology, image acquisition and analysis techniques have been gradually applied to the image acquisition and review of motion scenes based on computer vision analysis. For example, a software dynamic image restoration path detection algorithm based on fuzzy control algorithm is proposed [3]. It uses embedded feature extraction and fuzzy control algorithm to build a software dynamic image signal model for software dynamic image faults and performs spectrum decomposition and blind source separation on the signals of embedded software dynamic images under multiple loads to extract image features and analyze dynamic signals. Images are analyzed for some purpose. The introduction of high-tech means allows better analysis of athletes’ technical movements. The advanced science and technology are used to collect and analyze the service data in the video of tennis games, which can provide more references for tennis players’ training.
In modern sports research, the motion amplitude detection method is usually used to complete the collection of some technical action images [4], but the tennis serve action has multi-dimensional features, and the motion amplitude is difficult to capture. Therefore, it is necessary to study the correction algorithm and complete the path correction of tennis dynamic images. For example, Chen proposes a modeling method for tennis serve image path correction based on computer vision feature extraction, which solves the problem of inaccurate path extraction of tennis serve images [5]. The method first completes data collection based on remote video monitoring, takes the visual image of tennis serve as the information source for feature analysis, performs edge segmentation processing on it, and finally marks the corner of the failure point to optimize the modeling. Although this method completes the image path correction by extracting the player’s cartographic features, it cannot mark the error points during the serving process, resulting in poor path correction effect.
With the development of computer and artificial intelligence, pattern recognition has been widely used in image processing. The feature extraction of image processing and pattern recognition of statistical decision method, structure method, fuzzy method and artificial neural network method are studied, and the support vector machine (SVM), pattern recognition method and biomimetic pattern recognition method are analyzed [6]. It is found that it can only extract the features of tennis dynamic image processing without guaranteeing the accuracy of tennis dynamic image, so its recognition accuracy of the tennis serving path is not high. In view of the path tracking, correction, and recognition of tennis serve, many scholars have considereddynamic tennis image processing based on feature extraction, clustering algorithms, etc. For example, a ball track recognition and tracking system based on the color features of tennis balls is proposed to solve the problem of large error of artificial line judgment in current small and medium-sized tennis venues with less advanced equipment [7]. The method takes FPGA as the core, establishes a tennis image acquisition module, a spherical median filter processing module, a ball color detection and recognition module, a spherical morphological filtering module and a spherical centroid calculation module, and collects the color and motion characteristics of the tennis ball. This method is in place for the study of ball characteristics, but the design of its tracking module is insufficient, and it is difficult to accurately complete the tracking and positioning of tennis ball trajectory. He proposed a tennis motion video target tracking method based on mean shift algorithm [8]. The least square method is used to improve the traditional mean shift algorithm and predict the target position in the tennis video. After realizing iterative tracking, mean shift algorithm is used to determine the final tracking position. This method can improve the tracking efficiency, but the accuracy of tennis path extraction needs to be further improved. Wang proposed a ball tracking scheme based on optimal path forest clustering [9]. The method first preprocesses the input video to remove its cause and jitter, and then uses the plane intensity feature and the phase quaternion Fourier transform feature as the spherical feature to separate the target from the video epicenter, and finally uses the OPF clustering to separate the real target from the sphere candidate target, obtains the actual position of the sphere, and thus depicts the final sphere motion trajectory. This method can accurately predict the trajectory of the tennis ball from the video frame and complete the trajectory tracking. Although it has good accuracy and robustness, it can be hardly applied on a large scale.
Aiming at the above problems, this paper proposes a tennis dynamic image serving path correction algorithm based on a symmetric algorithm. In this paper, the visual acquisition model is used to complete the acquisition of tennis dynamic images. Then, the symmetric algorithm is used to complete the acquisition of the sphere outline, and the background difference method is adopted to obtain the complete sphere. Finally, the physical characteristics of the moving target are analyzed through the tennis serve visual model, and the path correction model is used to construct the relevant model and realize the path correction of the moving target. It is expected that more accurate tennis images can be obtained through the study of the path correction algorithm in this paper, which will facilitate the training of athletes.
2. Materials and Methods
2.1. Image Acquisition
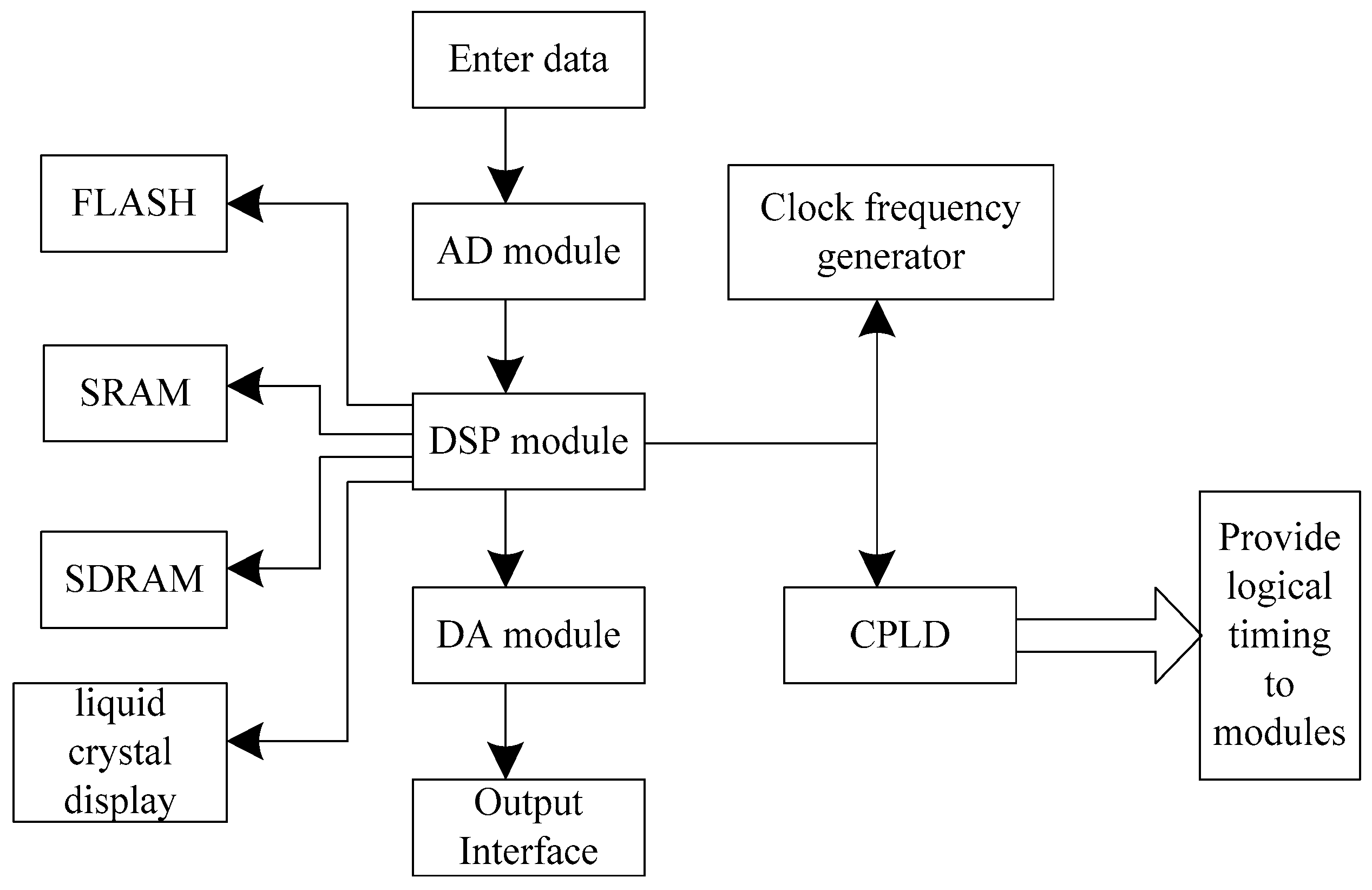
In order to realize the computer visual feature extraction of the tennis serve, it is first necessary to construct a tennis visual acquisition model. The video stream encoder in the network transmission process usually adopts the coding mode between frames, and uses the compensation prediction to delete the useless data in the time domain. In the process of transmission and acquisition of visual features of tennis ball movement, A/D converter is used to perform digital-to-analog conversion of visual features, and MPEG-4 is used for hardware design. The TMS320VC5509A is used to design the main control circuit of the visual feature acquisition system. The MUX101 program-controlled switch is used to control the two multipliers and accumulators (MAC) for video image transmission. The AD8021 chip is used for pipeline operation and realize anti-interference filtering of video. The program-controlled amplifier VCA810 is adopted to realize video capture of the spherical motion of the tennis ball, and the control decoding and reading operands are controlled by the DSP to ensure that the digital signal processing is real-time. The visual acquisition model of the tennis serve movement figure is shown in Figure 1.
As shown in Figure 1 above, the image data of the tennis ball is input first, then the A/D converter is used to realize the digital-to-analog conversion of the image, and then the DSP module is used to process the image. The module is mainly composed of flash memory, SRAM, SDRAM, liquid crystal display, clock frequency generator, CPLD, and other parts. The CPLD circuit mainly provides logic sequential circuits for the module. After the module is processed, the A/D converter is used to complete the processing of its data format and output image data.
2.2. Detection Algorithm of Moving Targets
Based on the dynamic image of the tennis ball obtained from the previous section, the moving target detection algorithm is obtained according to dynamic threshold symmetric difference and background difference.
2.2.1. Symmetric Difference
The so-called symmetric difference is a mathematical concept. The symmetric difference between two sets is a set composed of elements belonging to one set but not to another set. Symmetrical difference can eliminate the influence of background and obtain the contour of moving target accurately. The algorithm is as follows:
where , , represent three adjacent frames, respectively. In order to eliminate the segmentation effect caused by the slow motion of the moving target, in the actual processing, it is recommended to take one frame for every three frames. This method is more effective in eliminating the effects of slow motion of the object than using the frame-by-frame method. In Equations (1) and (2) represents window functions that suppress noise. Since the mean filtering blurs the image, the edge information is lost. Gaussian filtering of 3 × 3 window is employed to suppress noise. The threshold is obtained using a dynamic optimal threshold algorithm. FM(k) and FM(k + 1) respectively indicate the images after binarization of the frame difference. Then each pixel is processed and operated by the Equation (3), and finally a symmetric differential binary image is obtained. Through the above operations, the background influence is eliminated, the information in the image is quickly extracted, and the recognition efficiency is improved.
2.2.2. Background Difference Method
The background difference method is used to subtract the background reference frame from the current frame, and then select the appropriate threshold binarization of the obtained image to obtain a complete moving target. This algorithm is the simplest and most effective method, which completely overcomes the shortcomings of the adjacent frame difference method. The algorithm is suitable for target detection when the foreground is moving slowly. By comparing the difference between the gray values of the current source image and the background image , the binarized background image can be obtained by threshold segmentation.
The algorithm first initializes the background and updates the background in real time. The pixel gray value of the moving target position generally changes faster than the true background pixel value, based on which we can judge whether the pixel is a foreground pixel or a background pixel. According to FDM, if a pixel moves inside a certain period of time, it is considered to be a background pixel. The algorithm for background initialization and update is as follows:
In Equations (4)–(6): represents the length of time for recording the motion state of the pixel, which is specified by the user; BG(k) is the background at time k; and BI are both 0. The matrix D represents the probability that a pixel belongs to the background. If the value D is closer to 0, the probability of the pixel belongs to the background is higher; vice versa. When , the pixel will be updated to the background BG by Equation (5). BI is a binary template image, which indicates whether the background pixel of the current position exists, and if BI = 1, it exists.
Before updating the background using Equations (4) and (5) in this paper, it is judged by Equation (7) to improve the efficiency of background update. In the experiment, if , it is considered that there is no object moving in the frame, the background is updated directly by the Equation (5), and the value can be appropriately increased. In order to effectively avoid “ghost” phenomenon, the following Equation (7) can be applied.
After obtaining the background, the moving target expression is shown in the following Equation (8).
2.2.3. Dynamic Optimal Threshold
The dynamic optimal threshold is obtained by the dynamic optimal threshold acquisition algorithm. Based on the threshold processing technique, the algorithm defines the intra-class center of the foreground and background and the dispersion of the intra-class pixels from the gray feature of the image; center and dispersion, the class spacing discriminant function is introduced in [10,11,12]. The maximum separation of foreground and background is used as the criterion, and an algorithm that gives the optimal dynamic threshold is established.
With the gray level y as the threshold, it is supposed that all the pixels are divided into two categories: is the background class, which contains pixels smaller than t; P2 is the foreground class, which contains pixels larger than t. As D denotes the distance between P1 and P2, the larger the value of D, the larger, the class spacing between P1 and P2. When the threshold factor is ω, it is expressed by the following equation:
The cohesiveness of the two classes is also an important indicator reflecting whether the segmentation is effective. This paper defines the dispersion of classes from the distance from each pixel in the class to the inner center of the class. The smaller the dispersion of each class, the better its cohesiveness, and the better the classification effect. It is expressed by the following equation:
The threshold derived by this algorithm can well separate the target class and the background class. In the background difference algorithm of this paper, the following algorithm is used to obtain the dynamic threshold of the background difference. The threshold in Equation (8) is:
Equation (11) is a fixed value. In Equation (12) is the suppression coefficient, of which the value can be set according to the requirements of the actual application, and its reference value is 2; M × N represents the size of each image processed, whose numerical result indicates the number of pixels in the detection area; ΔT reflects the overall change of the environment. If the image illumination changes little, the dynamic threshold is a small value, which is close to 0 on the assumption that the pixels of the detection area are sufficient. If the image illumination changes significantly, the dynamic threshold ΔT will increase significantly.
2.2.4. Detection of Moving Targets
Using the viewpoint proposed by Mouton and Breckon, the moving target mask is extracted using Equation (13). The algorithm makes full use of symmetric difference and background difference and eliminates the influence of stationary moving target and covered background on the accurate detection of moving target [13].
2.3. Path Correction Optimization
2.3.1. Physical Features under the Visual Model
When using the visual acquisition model to analyze the physical features of moving objects [14], an extraction algorithm is needed. Combining the conversion, quantization, and modification of the prediction difference, it can achieve feature analysis, determine the error point of the serve action, and take the feature partition model [15].
The forward motion intensity distribution of the edge contour feature under the human body dynamics model is used in the recognition of the image during the tennis playing process [16,17,18,19,20,21]. When the athlete’s elbow is gradually straightened and approaching downward, the ball rotates in the air, and the probability density function of the position distribution in the air after the ball is released from the hand is:
where e represents the pre-judgment value between frames. If pixel i is a fixed code between frames, the compensation value relative to it can be regarded as zero, with as the pixel value of pixel i. The above process can be reconstructed by using quantization and inverse quantization in the encoder, and finally, through the edge contour view analysis, the communication coding error correction of the visual information feature transmission is realized, and the feature collection of the tennis serve movement is performed. In this technique, the motion equation for the viewpoint switching of the multi-contour 3D model of the tennis athlete is:
When throwing the ball and swinging the ball, the trend is perpendicular to the ground, and the technical feature duringthe course of throwing the ball 360 degrees is obtained. Further, the probability density function of the undulating dense transformation under the calculation of the coherent action using the standard normal distribution function is:
The sensor automatically collects the position of the tennis player’s human body, the angular velocity of the tennis ball and the angle of rotation. It is assumed that the position of the relative root coordinates in the motion coordinate system is converted to gc, and the target configuration is unknown. It is assumed that the action range of the ball logic control unit during serving and receiving at time (t) with the time body error . The random sample is:
The measurement equation of the ball in the diagonal ball socket under natural conditions is:
Constructing the world coordinate systems A and B, the optimal state feature of the driver from the waist to the end of the arm is obtained.
The tennis serve movement causes the face to be biased toward the inner corner position and the speed is and , and the upper limb mass is decomposed into two forces θ and , respectively. The ball naturally falls on the ball player’s thumb, and a visual image is obtained by inverse kinematic decomposition based on the end effect. The kinematic differential equation for the serve movement is:
where is the Jacobian matrix of the tennis tee-action arm. According to the relationship between the centroid distance and the coordinate axis, the direction, the drop point, and the rotational motion of the ball after the shot are solved as:
where = is the Moore–Penrose generalized inverse matrix of the matrix J under the change of the tee position. Through the above analysis, the physical characteristics of the tennis serve are analyzed.
2.3.2. Path Correction Optimization Based on Shape Features
Taking the physical characteristics of the athlete’s tennis serve movement obtained in the last section as the information source of the analysis [22,23,24,25,26,27], the image corresponding to the feature is edge-divided by image processing. Based on this, the corner mark of the teeing error point is realized, and the path optimization modeling of the tennis tee image is realized.
The sensor automatically collects information, such as the position, angular velocity, and rotation angle of the tennis athlete’s body when serving the ball. Assuming that the contour gc is in the visual coordinate system and the configuration of the standard motion is unknown, with the rectangular image block N0 and Ni including the edge and rich motion information of visual area. The motion equation in viewpoint switching for the tee action is constructed as:
In order to measure the similarity between the aerobic motions and Qi, the mapping relationship between the tennis player and the ball’s motion space is:
and
The motion image of the tennis ball is binarized, and s2 and c2 are taken as the landing points of the ball. As long as , the target area matrix of the motion feature image satisfies . Therefore, the visual edges of the action features of the tennis tee are divided into:
In Equation (25) to Equation (28), is the rotation angle of the dynamic image of the tennis tee action image, which is expressed as the angle between the longitudinal axis of the viewpoint moving target and the ground ; is the offset angle of the local feature matching. Since there are more parts of the body mobilized during the serve movement, the image edge amplitude information is decomposed into multiple mesh features, the point information is represented by , the corner point of the tee error is calibrated, and the corner of the serve error point is performed. The point-to-even adjustment is conducted to achieve the motion correction, and the corrected cut-off horizontal displacement amount is obtained as follows:
3. Results
3.1. Correction of the Serve Path
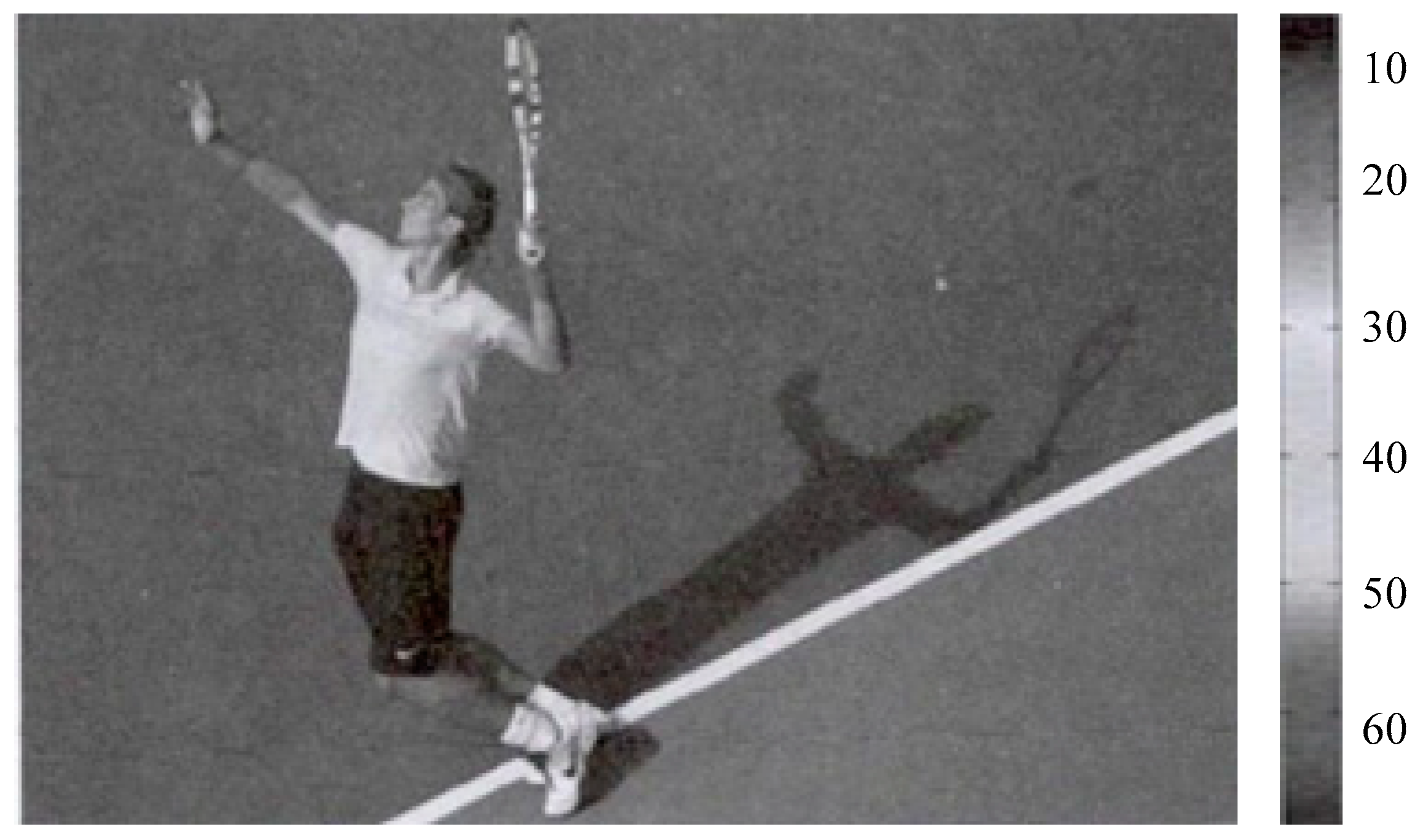
The performance of the proposed correction algorithm of tennis dynamic image serve path based on symmetric algorithm is experimentally tested. The experimental platform hardware environment is: ordinary desktop, CPU is Intel Core i3 processor 3.30 GHz, memory 4G DDR3. The resolution of the image is 320 × 240. In the experiment, 100 test samples of each mode in a set of simulation data form a total of 100 × 8 test sets, and 20, 50 or all 100 of 100 training samples of each mode are randomly taken to form 20 × 8, 50 × 8, 100 × 8 sample training set. Firstly, a simplified tennis tee action feature movement model is built in SolidWorks, and the model is saved as a Parasolid file. Then, the analysis data areimported into the Adams software, the motion data aresaved as txt file data, and the visual result of the serve movement of thetennis athlete’s body obtained when uncorrected is shown in Figure 2.
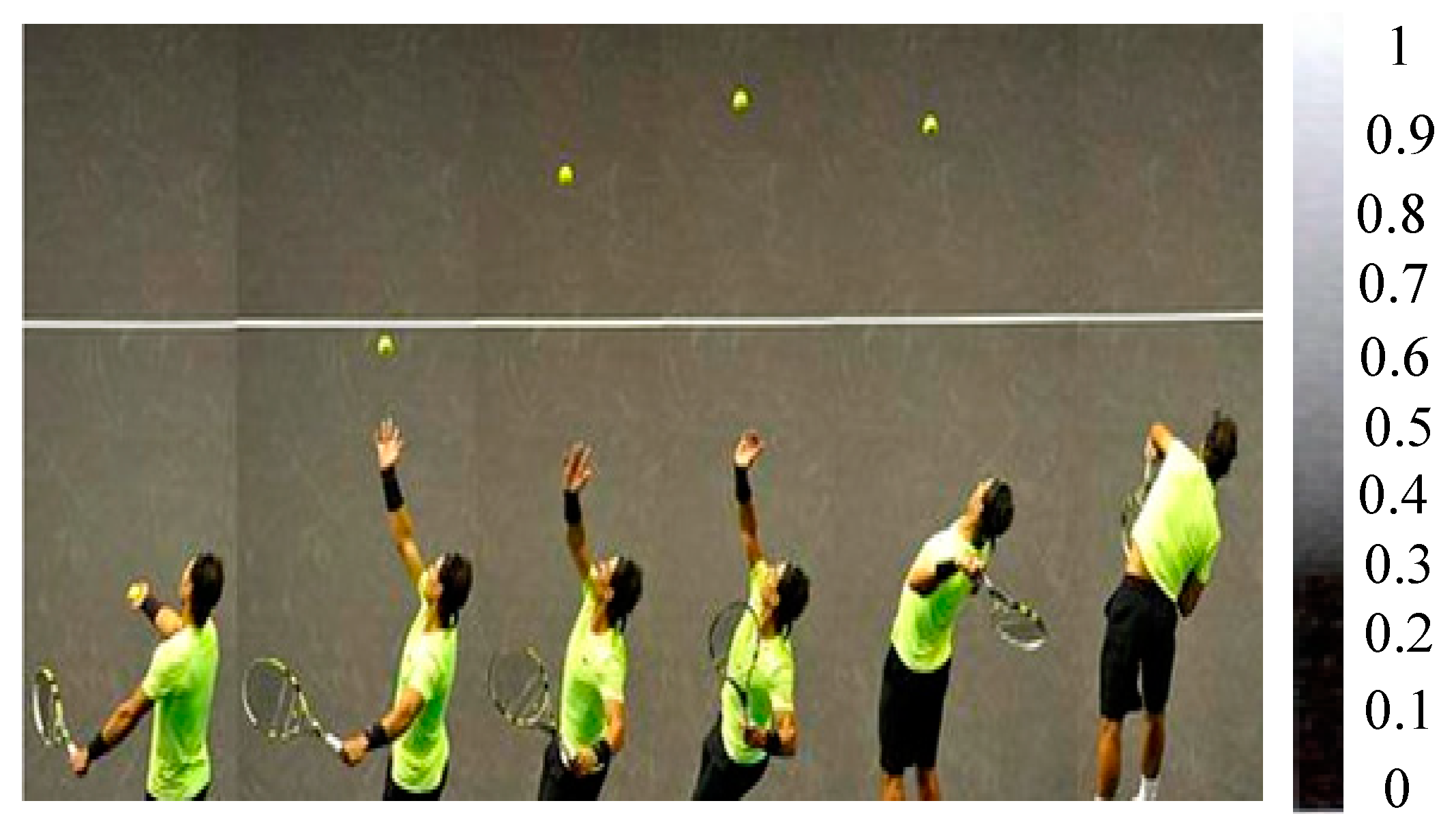
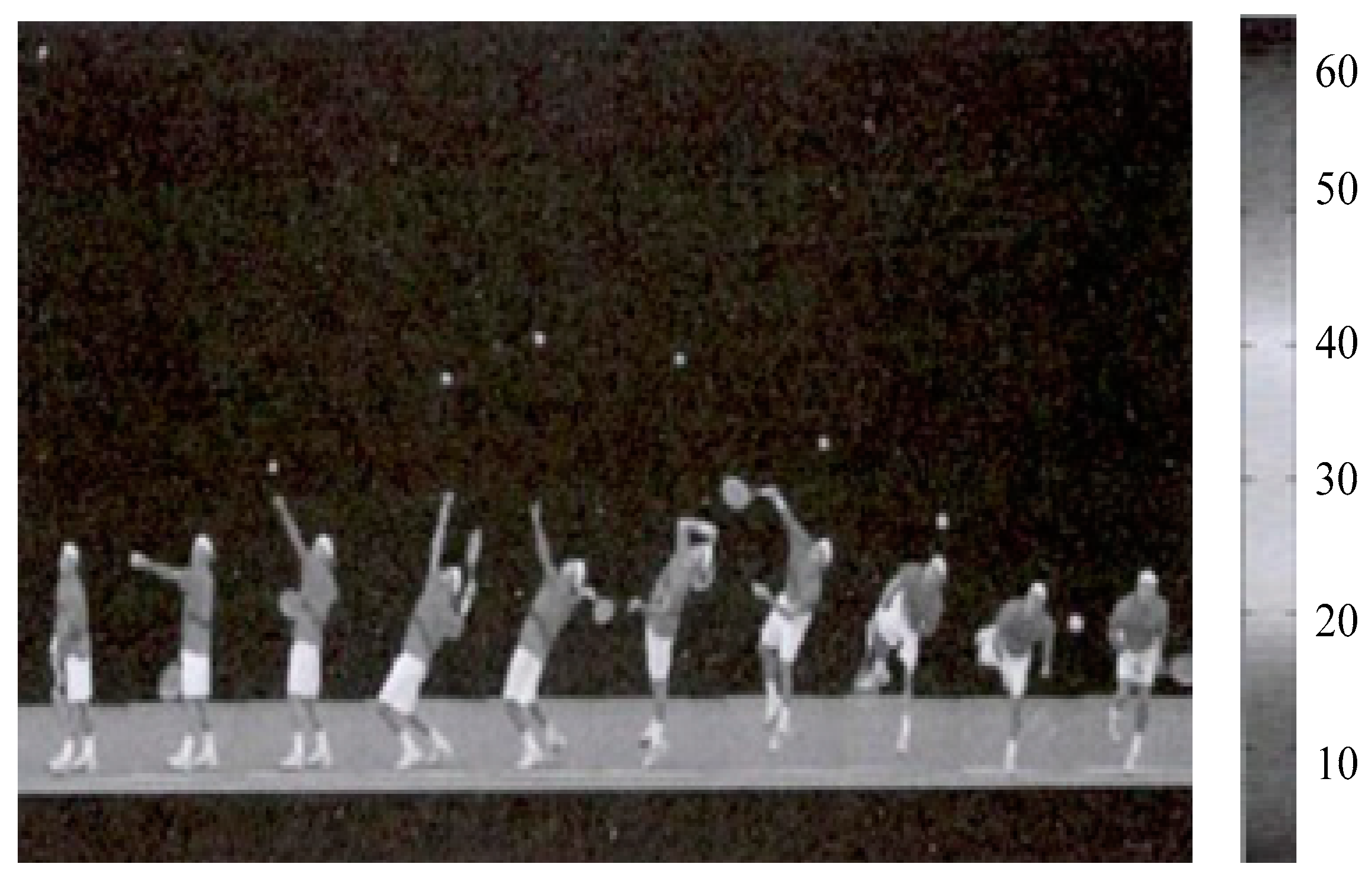
When using the proposed algorithm to correct the serve path, the image processing method is used to segment the edge of the collected dynamic image. Based on this, the corner mark of the serve error is realized, and the path correction of the tennis serve image is realized. The correction process is shown in Figure 3, and the corrected output is shown in Figure 4.
Analysis of Figure 4 shows that the real-timeliness and accuracy of the motion shape correction is better when using the proposed algorithm. It can accurately track the visual edge information feature points of the player during the serve and conduct real-time evaluation and guidance through the expert system to improve the serve skills.
3.2. Algorithm Comparison
Two tennis match videos were randomly selected. The experimental data are from the videos at both ends. Video1 was the video clip of A. Agassi and P. samptas in the 2002 US Open. Its website is https://www.bilibili.com/video/av23031837/ (accessed on 5 May 2018), Video 2 was R Federer and M Philippoussis’s competition clip, its website is https://www.bilibili.com/video/av55463620/ (accessed on 13 June 2019). After acquiring the images at both ends, try to mark the screen data. A shot is flagged as a webcam if it contains the player’s online actions. Conversely, if a shot does not contain the player’s online action, the shot is marked as a baseline shot. The players in the first half and the second half are marked respectively, and the basic information of the game is shown in Table 1.
For the players in the first half and the second half, if the internet clip is detected in the game shot, the shot is determined to be an online game shot and vice versa. The comparison experiment is conducted to analyze the recall rate and accuracy of detecting tennis motion in online and baseline motion paths under the method in reference [8] and method in reference [9] and the proposed method. The results are shown in Table 2.
As can be seen from Table 2, the maximum accuracy of the proposed algorithm for tennis net path and bottom-line path is 92.88% and 93.10%. respectively. The average recognition accuracy of tennis net path and baseline path is 46.72% and 44.43% higher than that of reference [8] in the first half, and 44.79% and 41.70% higher than that of reference [8] in the second half. In the first half, the average accuracy of the tennis net and baseline is improved by 28.57% and 24.25%, respectively, compared with the algorithm [9], and improved by 22.16% and 19.09%, respectively, in the second half. This shows that the algorithm can query the serve path of tennis dynamic image accurately. The main reason for this phenomenon is that the comparison method has a certain delay effect when tracking and detecting the tennis ball, and it cannot capture the trajectory of the tennis ball quickly, which leads to the decrease of prediction accuracy. In this paper, the visual acquisition model is mainly used to capture video frames, so the delay is small and the prediction accuracy is high.
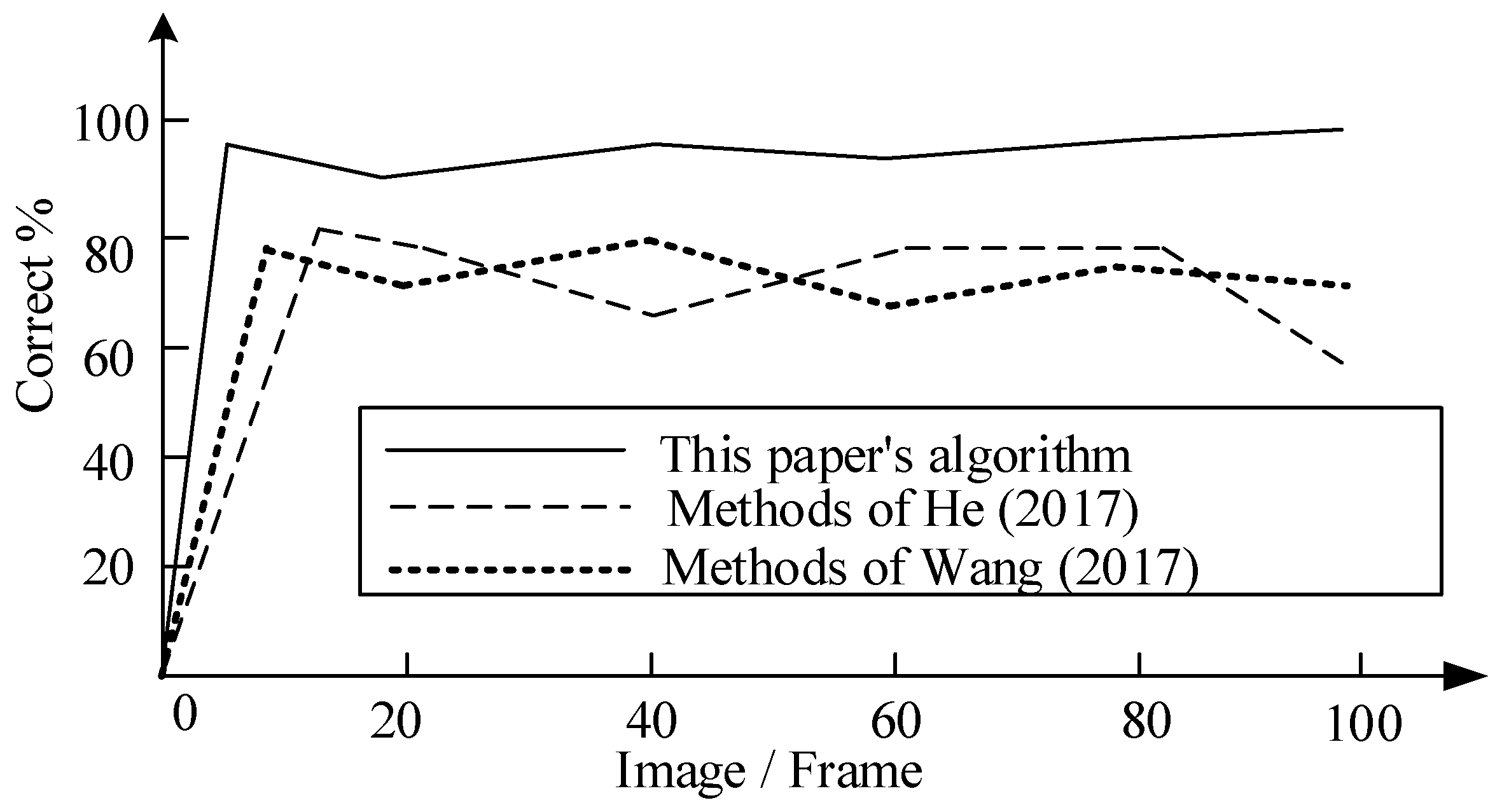
The accuracy of three algorithms for tennis serve motion video image recognition is compared, and this index is mainly used to evaluate the effect of image processing. The test results are shown in Figure 5.
It can be seen from Figure 5 that the correction accuracy of the method in reference [8] is 73%, that of the method in reference [9] is 76%, and that of the proposed algorithm is 95%. The correction accuracy of the proposed algorithm is 22%higher than that of the method in reference [8] and 19% higher than that of the method in reference [9]. With the increase of the number of image frames, the correction accuracy of the proposed algorithm is gradually improved, and the change is stable, which meets the requirements of the correction accuracy of tennis serve video images.
3.3. Tracking Accuracy of Common Motion Paths
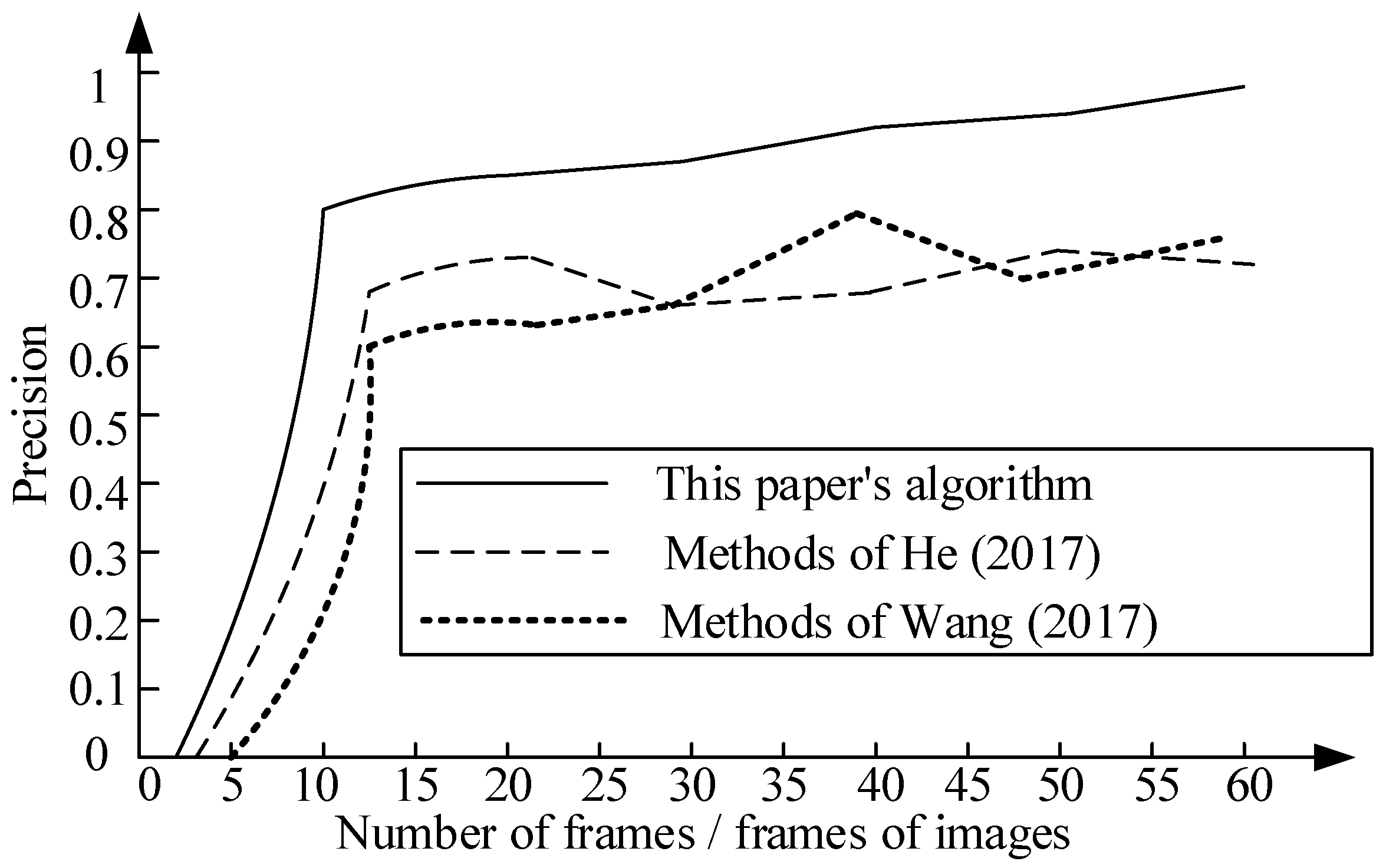
The algorithm has high accuracy in tracking the trajectory of the tennis ball dynamic image. The tracking accuracy is measured by the Euclidean distance between the tracking result and the actual position of the target. When the measured position error is less than the position error threshold, we can consider the tracking result satisfactory. Tracking accuracy is the evaluation of the entire path tracking algorithm. The algorithm in this paper describes the tracking results of the ordinary service path as shown in Figure 6.
It can be seen from the data in Figure 6 that when the routine tennis serve movement is detected, as the number of image frames increases, the tracking accuracy of the three algorithms gradually improves, and the tracking accuracy of the proposed algorithm is always higher than the other two algorithms. The average tracking accuracy of this algorithm is 0.92, while the average tracking accuracy of the other two algorithms is less than 0.78.
3.4. Tracking Accuracy in the Presence of Obstacles
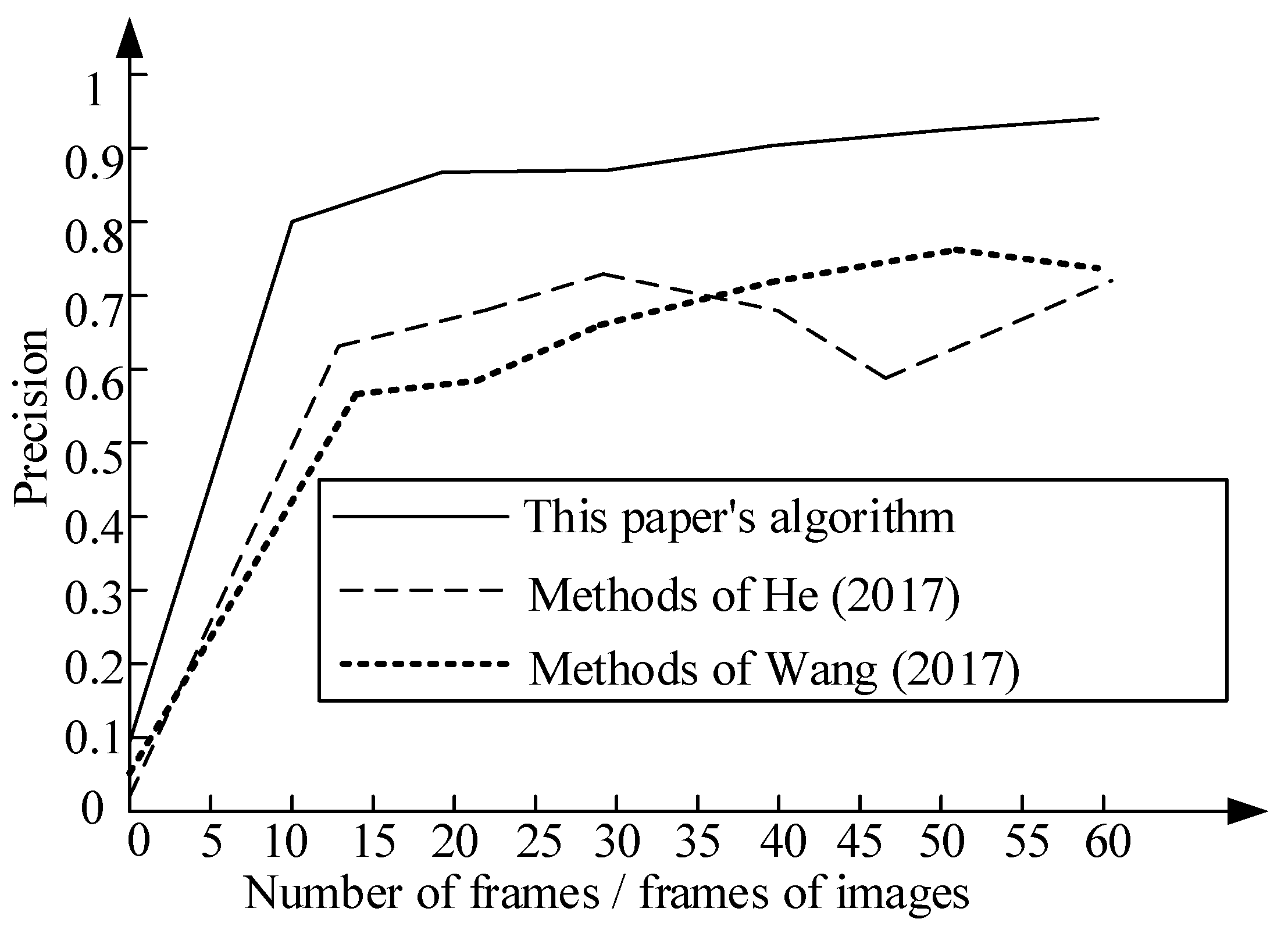
When an obstacle appears, the target may be occluded and lost. Tracking continues as the target moves out of the obstacle. Figure 7 depicts the accuracy of the three algorithms in tracking the tennis path in the presence of obstacles.
As can be seen from Figure 7, when obstacles exist, the tracking accuracy of the method in reference [8] gradually increases in the initial stage with the increase of the number of frames; when the number of frames reaches 30, the tracking accuracy gradually decreases; when the number of frames reaches 45, the tracking accuracy increases again. In the initial stage, the tracking accuracy of the method in reference [9] is low. When the number of frames reaches 35, the tracking accuracy gradually improves; when the number of frames reaches 50, the tracking accuracy decreases again. In this paper, the tracking accuracy of the path under obstacle interference is positively correlated with the number of frames. The average tracking accuracy is 0.94.
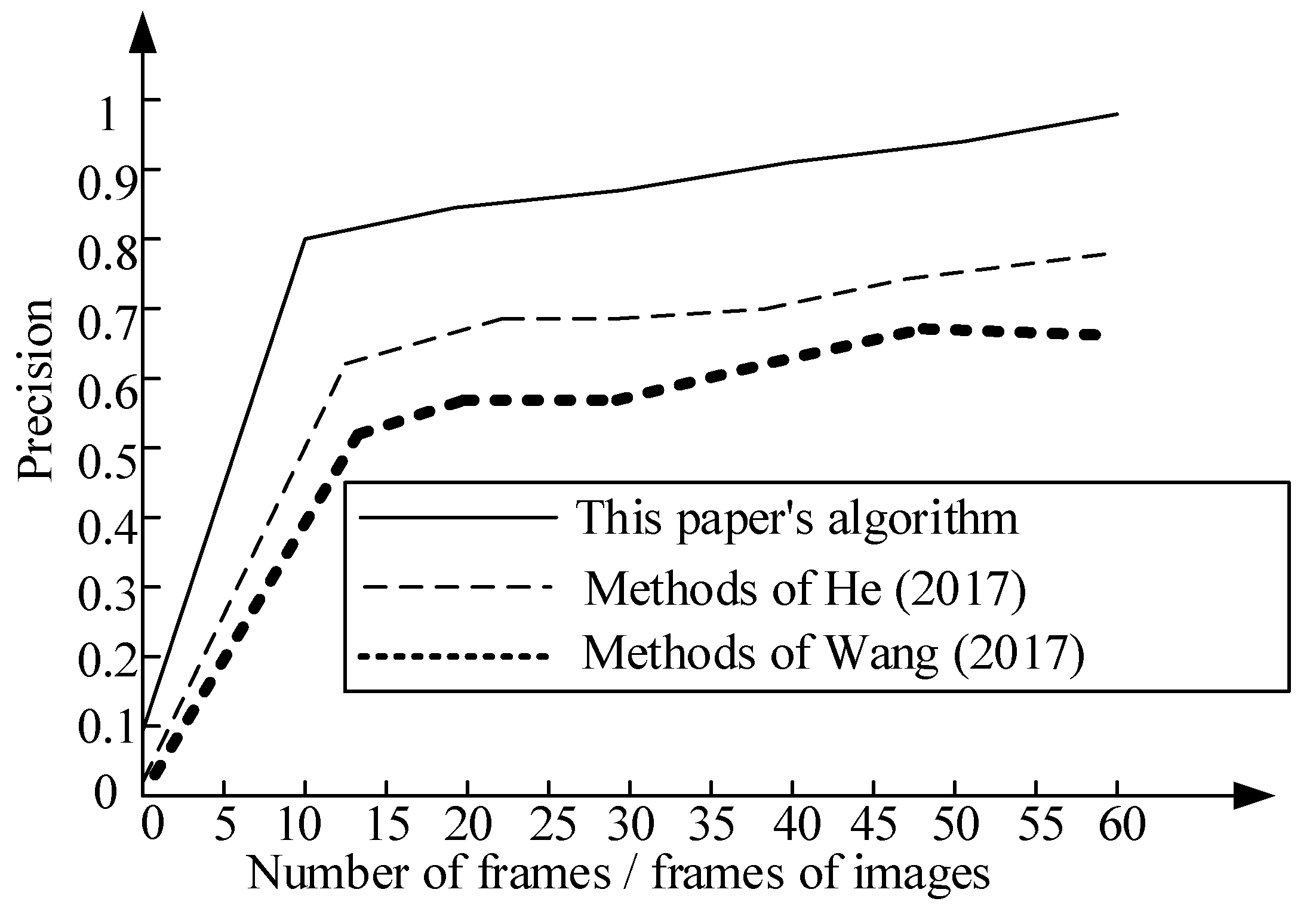
3.5. Tracking Accuracy Analysis under Complex Background
Figure 8 shows the comparison curves of target tracking accuracy of the proposed method, the method in reference [8], and the method in reference [9] under complex background.
As can be seen from the figure above, the tracking accuracy of the method in reference [8] is 0.70, that of the method in reference [9] is 0.57, and the target tracking accuracy of the proposed algorithm is 0.95. It can be concluded that the target tracking accuracy of the proposed algorithm is higher by 0.25 and 0.38 than the method in reference [8] and the method in reference [9], respectively. This shows that the proposed algorithm has high accuracy in the detection and tracking of the tennis tee path under complex background.
4. Discussion
After the analysis of Figure 3 and Figure 4, we perform edge segmentation on the acquired dynamic image following theimage processing method and mark the corner points of the error to achieve accurate correction of the serve path. As can be seen from Figure 5, the average correction accuracy of the method in reference [8] is 73%, that of the method in reference [9] is 75%, and that of the proposed algorithm is 96%.Through comparative analysis, we can conclude that the proposed algorithm has high correction accuracy. This is because the spherical motion image is obtained through the visual acquisition model, and the symmetric algorithm and the serve visual model are also fully utilized to obtain the physical features of the moving target, so that the serve path can be accurately corrected.
It is known from the tracking of tennis serving path under complex background that the highest precision of the proposed algorithm for the hanging net and bottom line of the tennis ball is 92.88% and 93.10%, respectively, and the average value of the image correction accuracy is 95%. The tracking accuracy of the service path under the complex background is 95%. The main reason for this is that the proposed algorithm uses the visual acquisition model to obtain the dynamic image. On this basis, the moving target contour is obtained by the symmetric algorithm, and the complete moving target can be known by using the background difference method. The physical characteristics of the moving target are analyzed by the tennis serve visual model. The path modification model based on the physical feature is used to construct the relevant model and realize the path correction of the moving target.
In addition, the proposed method has good correction performance and has high accuracy in tracking the tennis serve path, so it can be applied to the analysis of tennis matches. Firstly, the video image of tennis match is scanned by using the visual acquisition model constructed in this paper, and the dynamic image acquisition of the tennis serving process is completed. Then, the symmetric algorithm is used to extract the sphere contour, and the background difference method is used to remove the background so as to obtain the complete sphere information. Finally, the physical characteristics of the moving target are analyzed through the tennis service visual model, and the path trajectory is obtained. In this paper, the tennis service path tracking accuracy is high, and the correction model is mainly used to correct the path of the moving target, so that more accurate service information and more accurate game service data can be obtained. The obtained service data can be sorted out and an analysis report can be obtained, which is convenient for athletes and coaches to apply so as to help them achieve better results.
5. Conclusions
In order to further improve the tracking accuracy of tennis ball motion trajectory, this paper studies the correction algorithm of a tennis dynamic image serving path based on a symmetric algorithm. This method mainly uses the visual acquisition model to obtain the dynamic imageand obtains the complete target sphere through the symmetric algorithm and the background difference method. Finally, the physical characteristics of the moving target are analyzed, and the path correction model based on the physical characteristics is used to realize the path correction of the moving target. The superiority of this method is proved by experiments. The experimental results show that the highest accuracy of the proposed algorithm for tennis net and bottom line is 92.88% and 93.10%, respectively, and the average image correction accuracy is 95%. The tracking accuracy of the service path under complex background is 95%, which shows that the proposed algorithm has higher tracking accuracy of tennis dynamic paths under different states, so it has high application value.
Author Contributions
Conceptualization, L.L.; data curation, L.L.; formal analysis, L.L.; writing—original draft, A.Y.; writing—review and editing, A.Y. All authors have read and agreed to the published version of the manuscript.
Funding
The research is supported by: A Project Supported by Scientific Research Fund of Hunan Provincial Education Department (No. 19A013).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All data generated or analysed during this study are included in this published article.
Acknowledgments
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Xun, Y.Y.; Zhao, C.L.; Meng, J.A. Blind frequency estimation algorithm based on least mean square. J. China Acad. Electron. Inf. Technol. 2015, 10, 574–578. [Google Scholar]
- Jiang, H.W. Study on systematic tennis serving skill and synthetic and coordinated training system. J. Chengdu Sport Univ. 2016, 42, 61–65. [Google Scholar]
- Zhang, T. Fault Recovery Path Analysis of a Software Dynamic Image Based on a Fuzzy Control Algorithm. Symmetry 2020, 12, 897. [Google Scholar] [CrossRef]
- Wang, H.; Pei, Y. High-intensity sports load state monitoring system based on characteristic parameters. J. Qiqihar Univ. (Nat. Sci. Ed.) 2021, 37, 76–79+94. [Google Scholar]
- Chen, H. Optimization modeling and simulation of image path correction of tennisball. Comput. Simul. 2017, 34, 218–221. [Google Scholar]
- Gao, X.; Xing, Y.J. Pattern recognition and its application in image processing. Autom. Instr. 2015, 3, 102–103. [Google Scholar]
- Liu, Y.; Yin, X. Design of ball track recognition and tracking system based on tennis color features. Chin. Soc. Sports Sci. 2019, 1, 2838–2839. [Google Scholar]
- He, T. Sphere detection method based on OPF clustering in tennis video. J. Xiangtan Univ. Nat. Sci. 2017, 39, 115–118. [Google Scholar]
- Wang, H. Research on tennis sports video target tracking based on mean shift algorithm. Mod. Electron. Technol. 2017, 40, 73–76. [Google Scholar]
- Wei, T. A convergence and asymptotic analysis of the generalized symmetric fastica algorithm. IEEE Trans. Signal Process. 2015, 63, 6445–6458. [Google Scholar] [CrossRef]
- Zhou, W.; Yu, L.; Zhou, Y.; Qiu, W.; Wu, M.; Luo, T. Local and global feature learning for blind quality evaluation of screen content and natural scene images. IEEE Trans. Image Process. 2018, 27, 2086–2095. [Google Scholar] [CrossRef] [PubMed]
- Sui, T.; Marelli, D.; Sun, X.; Fu, M. Multi-sensor state estimation over lossy channels using coded measurements. Automatica 2020, 111, 108561. [Google Scholar] [CrossRef]
- Mouton, A.; Breckon, T.P. Materials-based 3D segmentation of unknown objects from dual-energy computed tomography imagery in baggage security screening. Pattern Recognit. 2015, 48, 1961–1978. [Google Scholar] [CrossRef]
- Pan, X.M.; Meng, X.F.; Yang, X.L. Asymmetric multiple-image authentication based on complex amplitude information multiplexing and RSA algorith. Acta Phys. Sin. 2015, 64, 110701. [Google Scholar]
- Zheng, W.; Yin, L.; Chen, X.; Ma, Z.; Liu, S.; Yang, B. Knowledge base graph embedding module design for Visual question answering model. Pattern Recognit. 2021, 120, 108153. [Google Scholar] [CrossRef]
- Guang, D. The symmetric generalized LIP model and its application in dynamic range enhancemen. J. Math. Imaging Vis. 2016, 55, 253–265. [Google Scholar]
- Cao, B.; Zhao, J.; Lv, Z.; Gu, Y.; Yang, P.; Halgamuge, S.K. Multiobjective evolution of fuzzy rough neural network via distributed parallelism for stock prediction. IEEE Trans. Fuzzy Syst. 2020, 28, 939–952. [Google Scholar] [CrossRef]
- Chao, M.; Kai, C.; Zhiwei, Z. Research on tobacco foreign body detection device based on machine vision. Trans. Inst. Meas. Control 2020, 42, 014233122092981. [Google Scholar] [CrossRef]
- Thakur, N.; Han, C.Y. A study of fall detection in assisted living: Identifying and improving the optimal machine learning method. J. Sens. Actuator Netw. 2021, 10, 39. [Google Scholar] [CrossRef]
- Fu, X.; Fortino, G.; Pace, P.; Aloi, G.; Li, W. Environment-fusion multipath routing protocol for wireless sensor networks. Inform. Fusion 2020, 53, 4–19. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, B.; Alenezi, F.; Li, S. Communication-efficient surrogate quantile regression for non-randomly distributed system. Inform. Sci. 2022, 588, 425–441. [Google Scholar] [CrossRef]
- Hemati, M.S.; Rowley, C.W.; Deem, E.A. De-biasing the dynamic mode decomposition for applied koopman spectral analysis. J. Nonlinear Sci. 2015, 25, 1–40. [Google Scholar]
- Cheng, Y.; Du, X.; Gu, Z.; Dai, P.; Li, H.; Wang, H. High-speed real-time track inspection image acquisition and processing system based on FPGA and DSP. China Railw. Sci. 2021, 42, 32–42. [Google Scholar]
- Liu, Y.; Yang, C.; Sun, Q.; Wu, S.; Lin, S.; Chou, Y. Enhanced embedding capacity for the SMSD-based data-hiding method. Signal Process. Image Commun. 2019, 78, 216–222. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, C.; Sun, Q. Thresholds based image extraction schemes in big data environment in intelligent traffic management. IEEE Trans. Intel. Transp. Syst. 2020, 22, 3952–3960. [Google Scholar] [CrossRef]
- Li, J.; Xu, K.; Chaudhuri, S.; Yumer, E.; Zhang, H.; Guibas, L.J. GRASS: Generative recursive autoencoders for shape structures. ACM Trans. Graph. 2017, 36, 1–14. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.L. A novel image encryption algorithm based on genetic recombination and hyper-chaotic systems. Nonlinear Dyn. 2016, 83, 333–346. [Google Scholar] [CrossRef]
- Lv, Z.; Song, H. Mobile internet of things under data physical fusion technology. IEEE Internet Things J. 2020, 7, 4616–4624. [Google Scholar] [CrossRef]
- Qu, S.; Zhao, L.; Xiong, Z. Cross-layer congestion control of wireless sensor networks based on fuzzy sliding mode control. Neural Comput. Appl. 2020, 32, 13505–13520. [Google Scholar] [CrossRef]
- Xu, W.; Qu, S.; Zhao, L.; Zhang, H. An improved adaptive sliding mode observer for a middle and high-speed rotors tracking. IEEE Trans. Power Electron. 2020, 36, 1043–1053. [Google Scholar] [CrossRef]
- Mou, J.; Duan, P.; Gao, L.; Liu, X.; Li, J. An effective hybrid collaborative algorithm for energy-efficient distributed permutation flow-shop inverse scheduling. Futur. Gener. Comput. Syst. 2022, 128, 521–537. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Q.; Zhang, Y. A fast image algorithm based on rows and columns switch. Nonlinear Dyn. 2015, 79, 1141–1149. [Google Scholar] [CrossRef]
- Zhang, H.; Qu, S.; Li, H.; Luo, J.; Xu, W. A moving shadow elimination method based on fusion of multi-feature. IEEE Access 2020, 8, 63971–63982. [Google Scholar] [CrossRef]
- Meng, F.; Cheng, W.; Wang, J. Semi-supervised software defect prediction model based on tri-training. KSII Trans. Internet Inf. Syst. 2021, 15, 4028–4042. [Google Scholar]
- Zhu, Q. Research on road traffic situation awareness system based on image big data. IEEE Int. Syst. 2020, 35, 18–26. [Google Scholar] [CrossRef]
- Zheng, W.; Liu, X.; Yin, L. Research on image classification method based on improved multi-scale relational network. PeerJ Comput. Sci. 2021, 7, e613. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Visual collection model of tennis serve movement.

Figure 2.
Image path acquisition of tennis serve without correction.

Figure 3.
Path correction process for tennis serve image.

Figure 4.
Output of tennis serve movement correction.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Basic information for testing video data.
| Video Frequency | All Lenses | Competition Lens | First Half Player | Second Half Player | ||
|---|---|---|---|---|---|---|
| Surf the Internet | Base Line | Surf the Internet | Base Line | |||
| Video 1 | 881 | 316 | 58 | 258 | 230 | 86 |
| Video 2 | 624 | 271 | 100 | 171 | 114 | 157 |
| sum | 1505 | 587 | 158 | 429 | 344 | 243 |
Table 2.
Experimental results.
| Algorithm | Competition Lens | First Half Player | Second Half Player | ||
|---|---|---|---|---|---|
| Quotation Rate (%) | Search Rate (%) | Quotation Rate (%) | Search Rate (%) | ||
| Methods of reference [8] | surf the internet | 29.78 | 30.38 | 55.43 | 61.98 |
| base line | 62.26 | 66.87 | 40.15 | 38.46 | |
| mean value | 46.16 | 48.67 | 47.78 | 50.18 | |
| Methods of reference [9] | surf the internet | 50.35 | 66.24 | 70.31 | 75.46 |
| base line | 77.88 | 71.66 | 69.87 | 70.51 | |
| mean value | 64.31 | 68.85 | 70.41 | 72.79 | |
| The proposed algorithm | surf the internet | 90.12 | 88.56 | 94.38 | 90.11 |
| base line | 95.65 | 97.65 | 90.77 | 93.66 | |
| mean value | 92.88 | 93.10 | 92.57 | 91.88 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, L.; Yang, A. Correction Algorithm of Tennis Dynamic Image Serving Path Based on Symmetric Algorithm. Symmetry 2022, 14, 1833. https://doi.org/10.3390/sym14091833
AMA Style
Li L, Yang A. Correction Algorithm of Tennis Dynamic Image Serving Path Based on Symmetric Algorithm. Symmetry. 2022; 14(9):1833. https://doi.org/10.3390/sym14091833
Chicago/Turabian StyleLi, Liangming, and Aihua Yang. 2022. "Correction Algorithm of Tennis Dynamic Image Serving Path Based on Symmetric Algorithm" Symmetry 14, no. 9: 1833. https://doi.org/10.3390/sym14091833
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.