3.1. UWB Channel CIR Feature Extraction
UWB technology estimates distances by calculating the time of flight of signals between devices. In the ranging process, the UWB transmitter emits signals at a predetermined frequency and logs the transmission time. Concurrently, the UWB receiver continuously monitors the received signal’s energy level. When this level surpasses a predefined threshold set by the built-in leading-edge detection (LDE) algorithm, the corresponding time is marked as the signal arrival time. The system then computes the ToF using both the signal emission and arrival times, which is pivotal for accurate ranging results. The LDE algorithm plays a critical role in this process by determining the threshold and the precise signal arrival time based on the CIR. The CIR is a digital measurement of the energy of the received UWB signal and environmental signal noise by UWB hardware. Within the unit time (1.0016 ns) of a UWB quartz clock, the hardware estimates the correlation between the cumulative input sample and the expected potential customer sequence to calculate the CIR, which is recorded as
[
26,
45,
46].
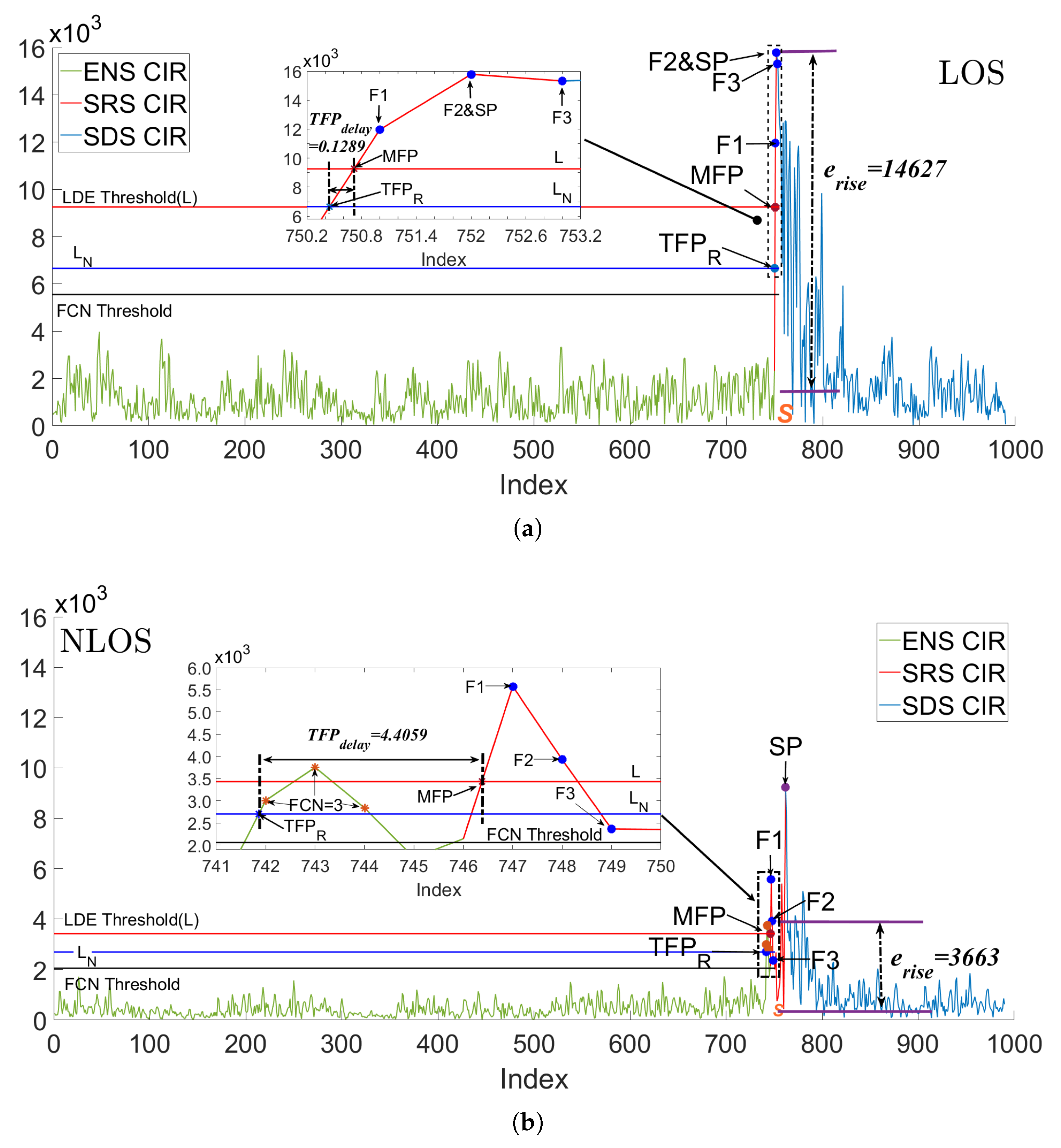
Figure 1a shows the major effective CIRs during one communication in typical LOS. The hardware uses the threshold (
L) from the embedded LDE algorithm [
47] to identify the FP, and its formula is as follows:
where
S is the standard deviation of the CIRs, indicative of the environmental noise level, and
is the noise threshold multiplier, which is set to a constant value of 13 [
48].
As illustrated in
Figure 1, the UWB system continuously evaluates the CIR, while the LDE algorithm dynamically calculates the environmental noise level
S (represented by the purple horizontal line) and updates the FP judgment threshold
L (depicted as the red horizontal line) in real time based on the formula. When the CIR first surpasses the dynamic threshold
L, the system records this moment as the arrival time of the Measured First Path (MFP), as shown in
Figure 1. This study categorizes the CIRs (green line in
Figure 1) preceding the MFP, as reported by the LDE, as the environmental noise stage (ENS). These represent signal noises from the environment and, according to the LOS theory, do not contain UWB signals. Points
,
, and
in
Figure 1 correspond to the CIR amplitudes at three distinct moments post-MFP, closely associated with the signal energy. UWB signals, emitted from the transmitter antenna, reach the receiver through various paths, causing a gradual increase in the CIR. In indoor environments, where the dimensions are relatively small compared to the speed of light, some signals may arrive within intervals shorter than the quartz clock’s resolution, resulting in their recording as a superposition. This leads to the formation of a single CIR with maximum amplitude, identified as the Strongest Path (SP) in
Figure 1, marking the culmination of the CIR rise process due to the UWB signal. As depicted in
Figure 1a, this paper classifies the CIRs (red line in
Figure 1) between the MFP and SP as the CIR steep rise stage (SRS). The subsequent CIRs (blue line in
Figure 1) comprise multipath (MP) signals, whose energy progressively diminishes with increased transmission distance, defining the CIR as the slow descent stage (SDS).
In the NLOS scenario depicted in
Figure 1b, the TFP signal is attenuated by obstacles and obscured within the ENS, with its amplitude falling below the dynamic threshold
L set by the LDE algorithm, leading to the misidentification of the TFP. The contrast between the NLOS (
Figure 1b) and LOS (
Figure 1a) conditions has prompted researchers to develop numerous CIR features to differentiate between channel states. However, the reliance on a substantial portion of the CIRs introduces certain limitations to the existing CIR features. Firstly, processing a large volume of CIRs generates redundant information, which can result in the underutilization of the identification capabilities of CIR features and increased latency. Secondly, the current CIR features, which are independent of the LDE and critical communication stages, are unidimensional, focusing solely on the mathematical characteristics of the entire sequence of CIRs, thereby compromising environmental robustness. To address these shortcomings, this paper introduces two novel parameters: TFP delay (
) and energy rise (
), which are formulated in light of the limitations of the LDE and the distinctions between the TFP signal and signal noise levels.
- (1)
TFP delay ()
The LDE algorithm dynamically evaluates the signal noise level using the parameter
S in (1). However, as shown in
Figure 1,
S (purple horizontal line) alone cannot effectively distinguish signal noise from the TFP for threshold comparison, leading to misjudgment of the TFP caused by the fluctuation and mutation of signal noise. To address this, the LDE algorithm introduces
to effectively distinguish between signal noise and the TFP, thus preventing misjudgment. However, the fixed
is unsuitable for the variable external environment, which may result in the incorrect classification of certain UWB signal CIRs as
S, thereby further enhancing
L. This creates a vicious cycle and significant delay between the MFP and TFP. To address this issue, we initially organize the CIRs in the ENS in ascending order and construct the Cumulative Distribution Function (CDF). The inverse function of the CDF, denoted as
, is utilized to establish a new signal noise level. The ‘−1’ in the upper right corner signifies the inverse function. Under four experimental campaign scenarios, starting with 50% of the CIRs as the baseline for environmental noise and incrementally increasing this proportion, we observe that the ratio of the average values of the remaining and utilized CIRs predominantly ranges between 2.5 and 3.5. As the proportion escalates from 80% to 86%, it stabilizes approximately between 2.91 and 2.92. Continuing this increase, the ratio reaches an average of 2.98 at 90%, with a growth rate of 0.01. Beyond this point, further escalation in the CIR ratio results in an increased growth rate of 0.02 to 0.05. This indicates that the amplitude of the residual CIRs in the sequence is significantly higher than that of the earlier CIRs, suggesting their origin from either the UWB CIR or anomalous signal noise. Consequently, to accurately gauge the real environmental noise, this study considers 90% of the CIR as representative of environmental noise. Additionally, a new multiplier similar (=3) to
is chosen to offset the signal noise mutation. The value 3 was chosen based on the four experimental campaign scenarios that were each repeated 20 times to give rise to the highest LOS/NLOS differentiation with a
accuracy of around 60% to 73%. Consequently, the new threshold (
) used to identify the UWB signal is given by:
This paper used
(the blue horizontal line in
Figure 1) to rejudge the true FP (
). The positive delay between the
and MFP, which is defined as
, can be calculated as follows:
where
t is the time of the CIR value that exceeds the threshold
. In theory, the CIR in the LOS ENS is stable, with only natural fluctuations and no UWB signal. Hence, both
S and
can accurately evaluate the signal noise level. Since the CIR rises sharply and approaches a vertical line under LOS conditions,
is very small at 0.1289, as shown in
Figure 1a. In NLOS, the fixed
value is too large and can cause
L to increase, leading to a wrongly classified weakened TFP and high-energy MPs as the ENS, resulting in a vicious circle of increasing
S and
L. At this point, there is a large difference between the MFP identified by the LDE and the TFP. In this paper, we use
of
to evaluate the real signal noise level and avoid the high-energy TFP and MP from UWB, along with a multiplier of 3 to avoid signal noise mutation. Moreover, the weakened TFP slowly increases the CIR, leading to a further enlarging of
under NLOS conditions with a value of 4.4059, as shown in
Figure 1b.
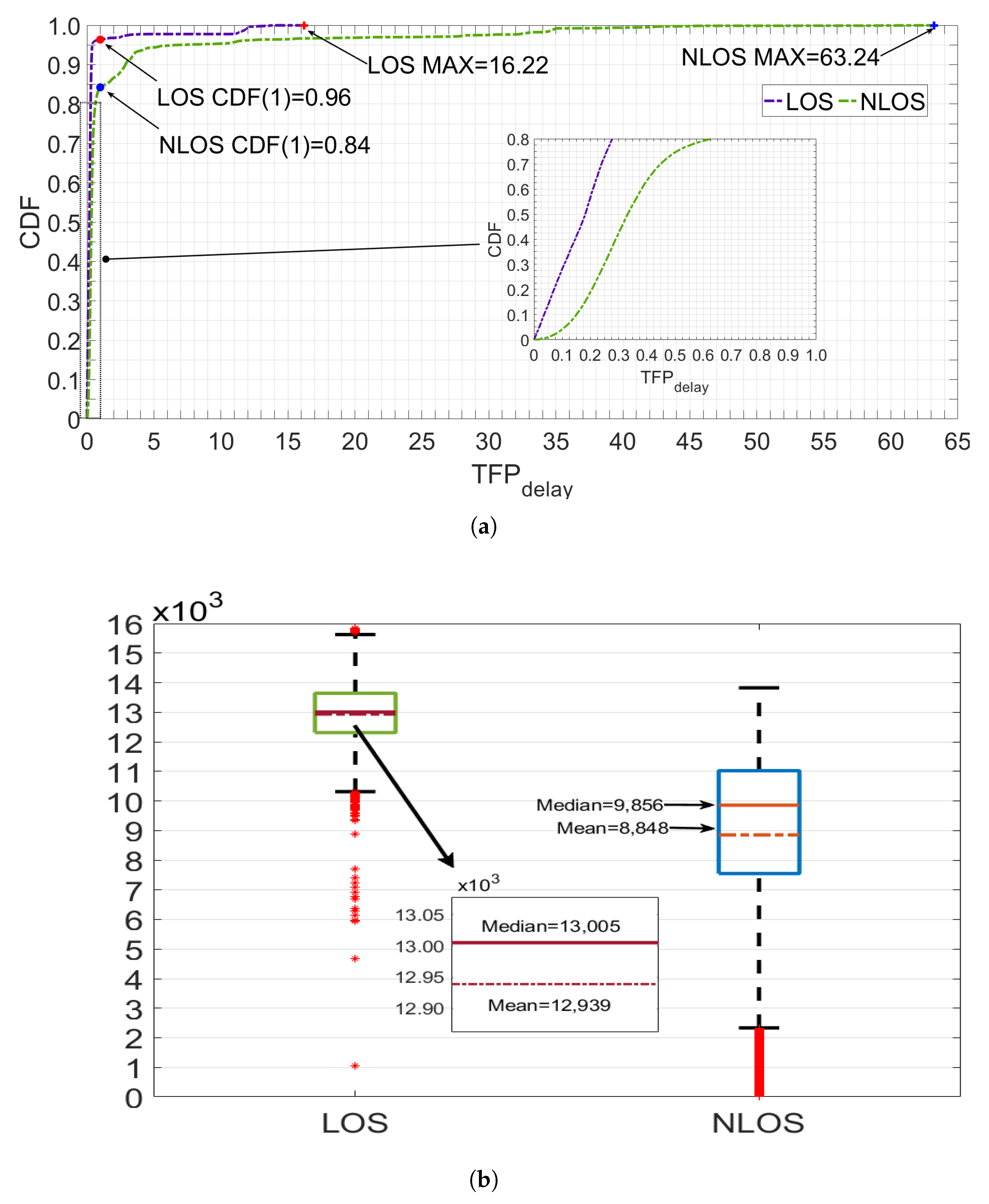
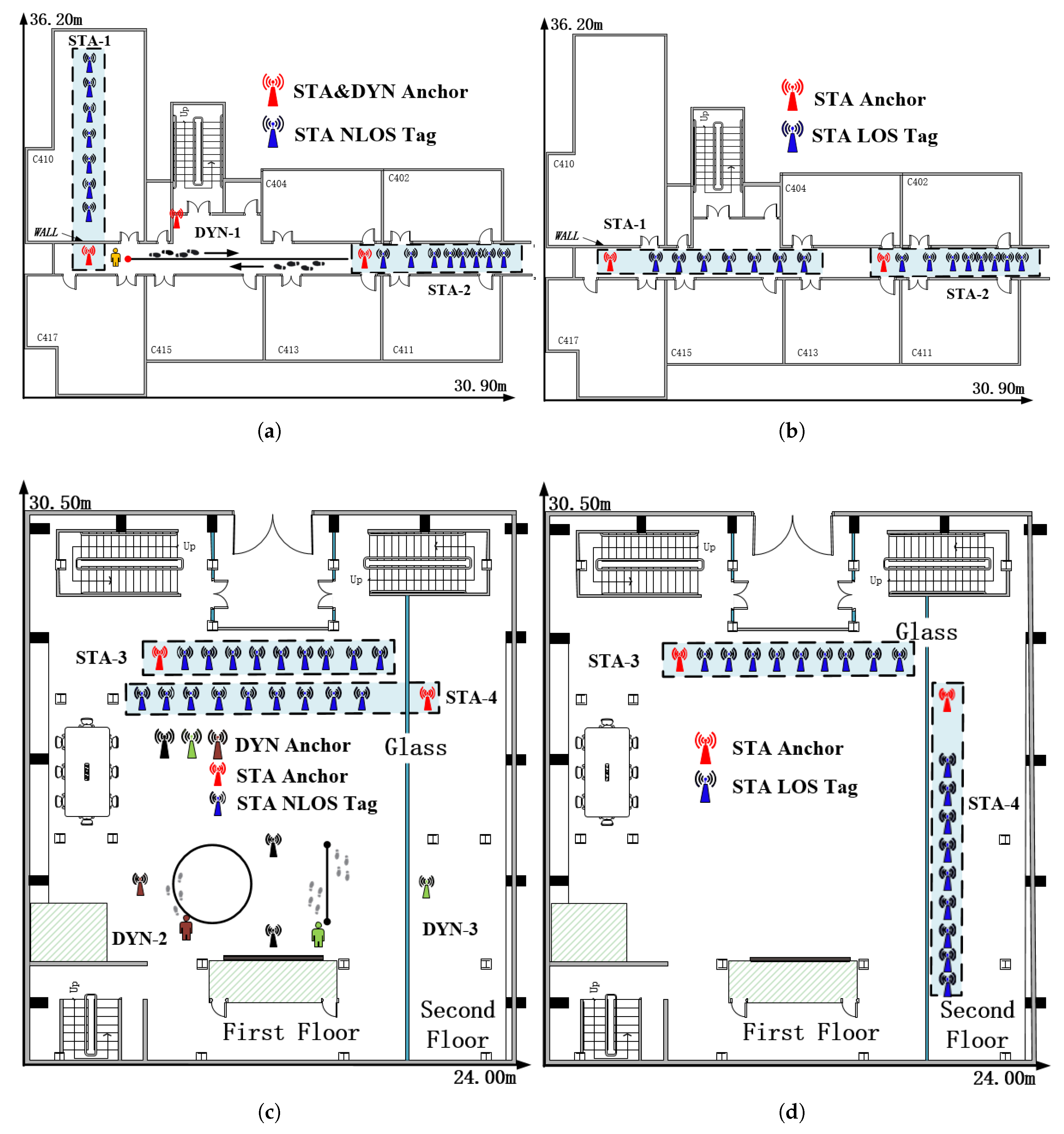
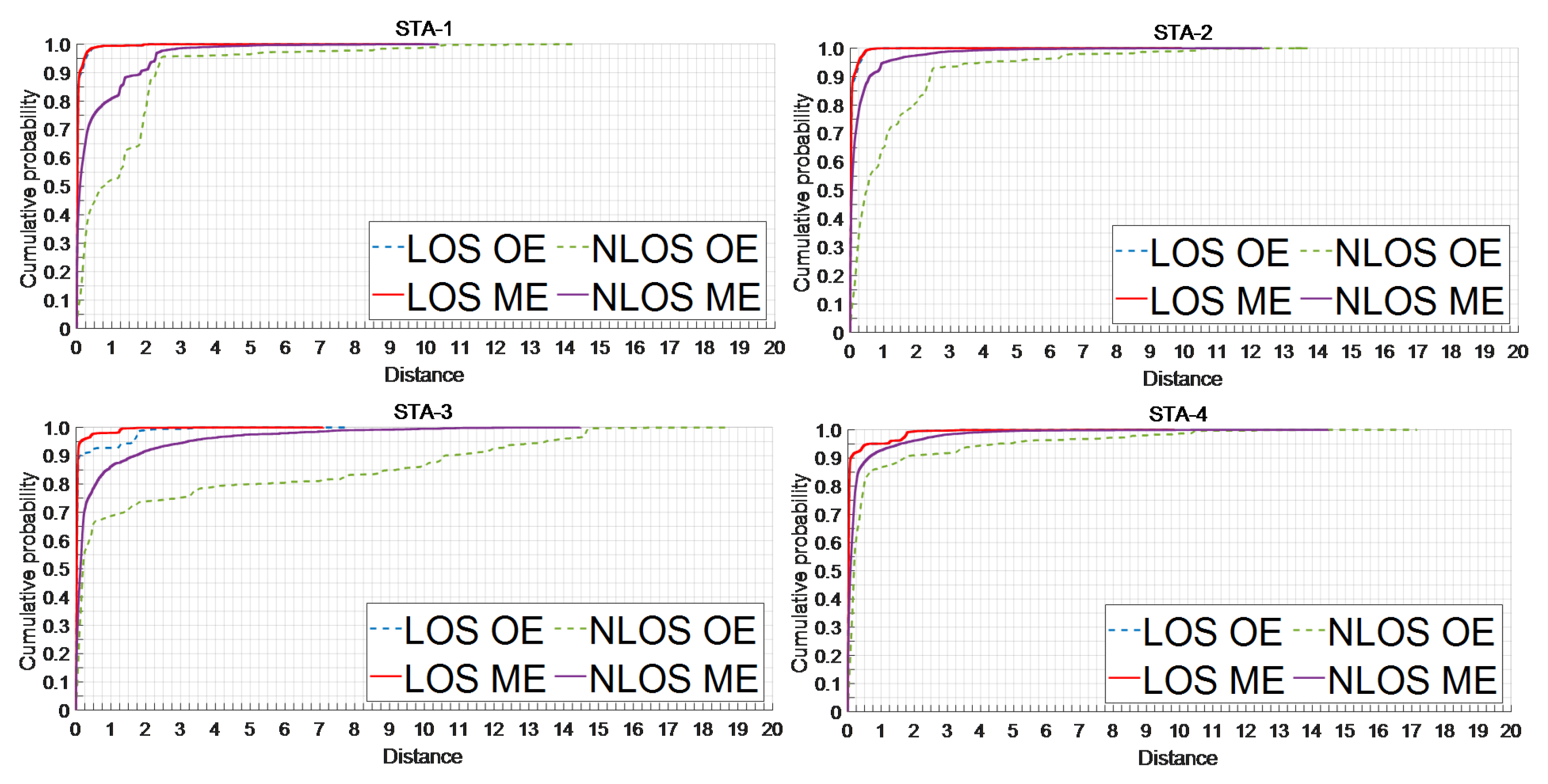
Figure 2a shows the distribution of
in different channel environments. The total data of the
is 33,000, derived from the actual measurements of four static experiments consisting of two experimental scenarios and three obstacles. Overall,
in NLOS is higher than in LOS, with a maximum value of 63.24 in the multiscene dataset, which is much higher than the 16.22 in LOS. In LOS, 95.8% of
is concentrated at 0.5 and below, whereas this number decreases to 75% in NLOS. When the range of
extends to 1, the proportion of NLOS is only 84%, which is still much lower than the 96% in LOS. Combining the principle analysis and data distribution, the proposed new CIR feature,
, can be effectively used to distinguish the channel state.
- (2)
Energy Rise ()
The typical energy-based CIR features are statistical characteristics of the CIR sequence that correspond to different UWB signal types or according to the correlation between the energy and rapid rise of individual CIR features, such as
and
. However, these parameters do not take into account the channel information contained in the signal noise energy from the environment. To address this, we propose a new parameter called energy rise (
), which considers the energy difference between the UWB’s FP signal and signal noise level, as follows:
where
is the CIR of the second index after the
, as shown in
Figure 1, and
S is the same as in (1). In LOS, the CIR rises rapidly and reaches maximum amplitude within three units after the
. Empirically, the maximum amplitude is likely to be
in LOS, as shown in
Figure 1a, which is highly distinguishable from the signal noise level [
48]. However, in NLOS, due to the high delay in the SRS caused by obstacle interference with the UWB signal, the energy cannot reach its maximum value at
, as shown in
Figure 1b. The difference between
and
S under NLOS conditions is much smaller than that under LOS conditions. As shown in
Figure 1a, the
value in LOS is 14,627, which is 10,964 higher than that in NLOS (3663). Moreover,
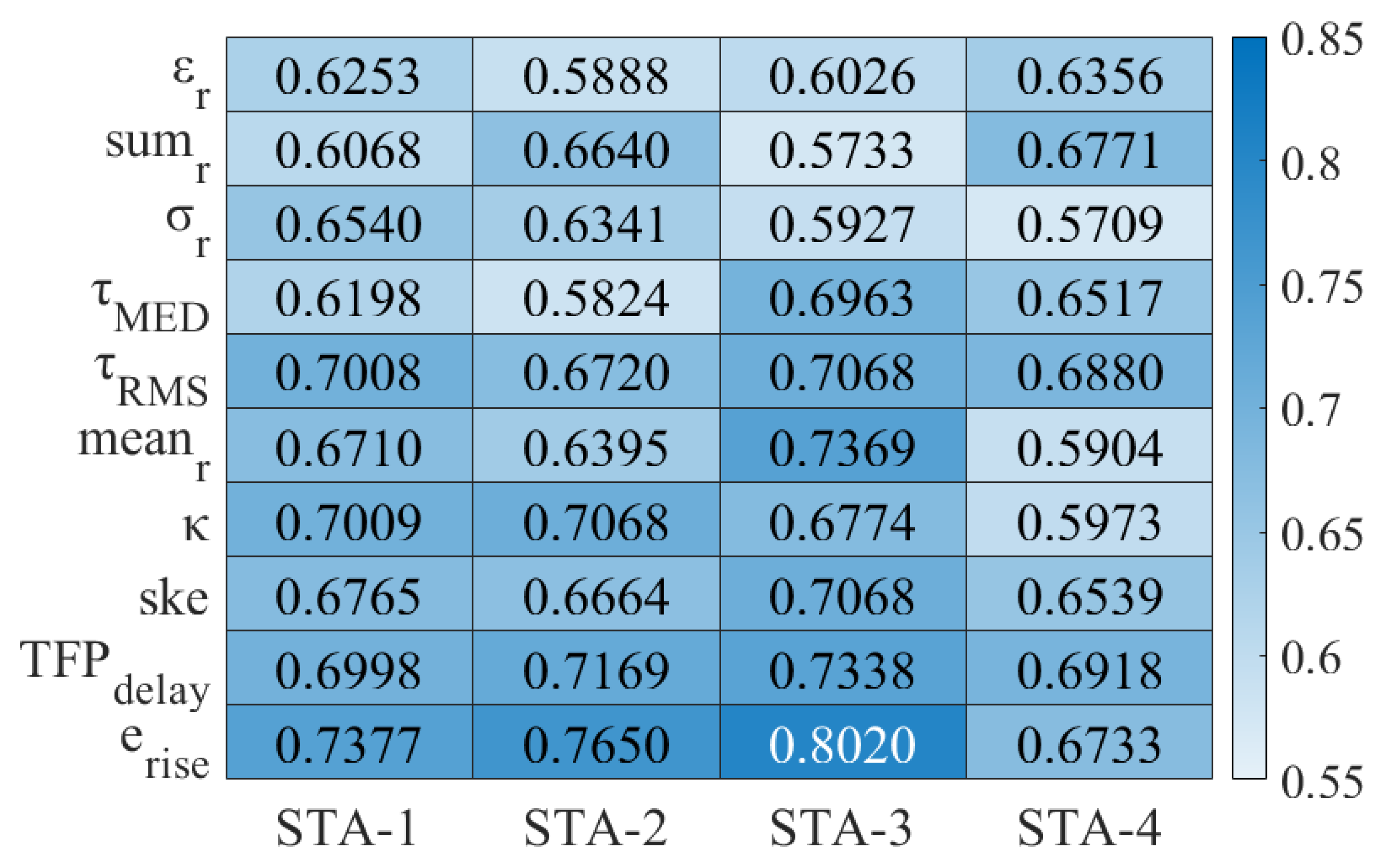
Figure 2b and
Table 1 show that the
values in LOS under multiple scenarios (same as
) are significantly higher than those in NLOS. Under LOS, the
values are mostly clustered between
and
, whereas under NLOS, they are clustered between
and
. The average (median)
value in NLOS is 8848 (9856), which is much lower than 12,939 (13,005) in LOS. Data with
values below
mostly correspond to the NLOS channel.
3.2. Fuzzy Credibility Evaluation
In different scenarios, the same CIR feature value may indicate an opposite channel state under different external conditions. This is mainly because obstacles with different materials and thicknesses attenuate signals in different ways, causing fluctuations in the numerical values of CIR features. This phenomenon is one of the reasons why the classification accuracy of CIR features fluctuates with changes in external conditions. To improve the environmental robustness of CIR features and identification algorithms, this paper introduces the concept of fuzziness and employs fuzzy theory to extract channel information from the parameters. Rather than ultimately attributing the CIR feature with a specific value (
) to LOS or NLOS, this paper assigns a new result (
) to measure the probability of the data’s channel environment being identified as LOS.
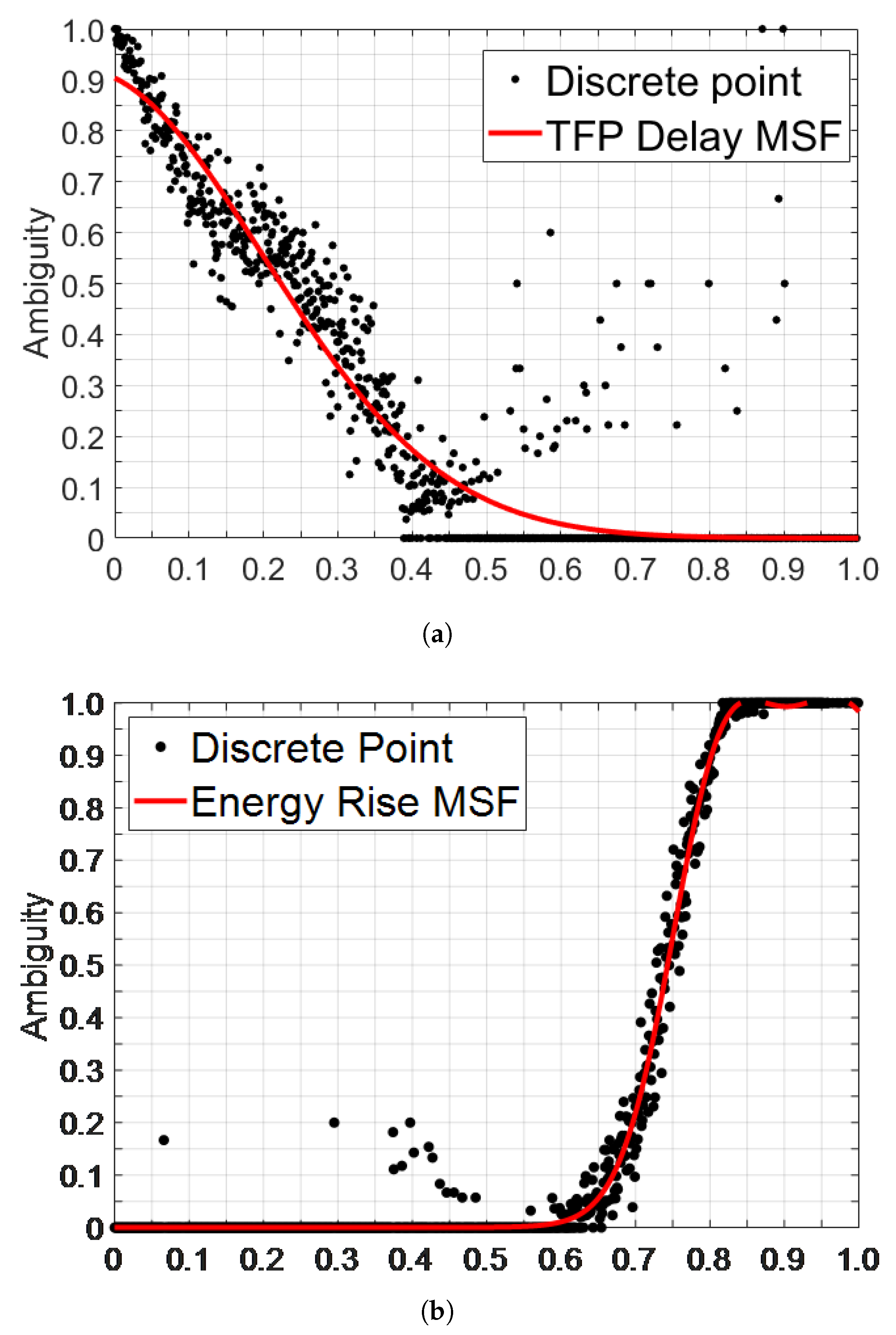
is determined by the membership function (MSF), which is defined using statistical information or experience and consists of three steps. First, the CIR feature values are compressed to
to obtain the normalized
from
by leveraging large amounts of off-line data. This can reduce the influence of varying parameter dimensions on the defuzzification operation. Second, the statistical probability method is used to determine the ambiguity of
by counting the number of occurrences of the same value in the LOS (
) and NLOS (
) channels. The ambiguity of
is
. Third, as more data are collected and parameter intervals are refined, a larger number of discrete points can be obtained, as illustrated in
Figure 3. This paper employs Gaussian fitting to determine the MSF of new CIR features, as depicted by the red curve in
Figure 3. More information on the MSF and other parameters can be found in [
49,
50].
The above operations are fuzzy operations for a single CIR feature. The operation to obtain the fuzziness of the feature vector set is as follows, which is called defuzzification:
where
F and
are two fuzzy sets of the credibility evaluation domain and normalized parameter domain, respectively;
R represents the above fuzzy sets’ relationship; and ‘∘’ is the fuzzy operator used to obtain the evaluation results according to the information of the fuzzy sets. Suppose there are
m kinds of data, and each combination
has
J, as follows:
where
is the normalized value of
. The correlation matrix
R is defined as
=
, and the credibility evaluation of the CIR feature vector is evaluated using
, as follows:
where
is calculated differently according to different fuzzy operators. This paper uses the average (
) and weighted-average (
) values of CIR features to evaluate the ambiguity of the vector, as follows:
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}