

A Sensor Placement Approach Using Multi-Objective Hypergraph Particle Swarm Optimization to Improve Effectiveness of Structural Health Monitoring Systems

Abstract
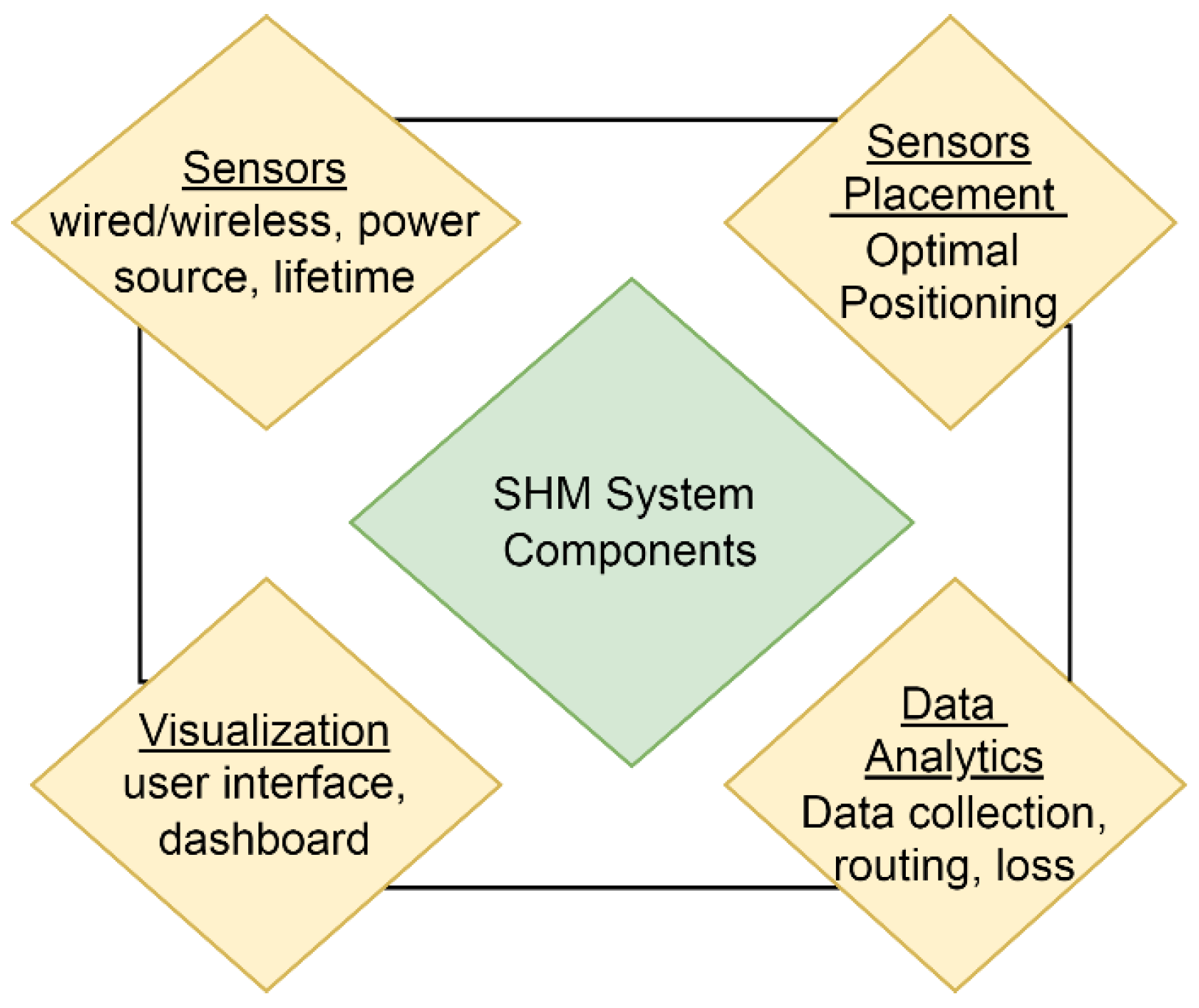
:1. Introduction
- A novel optimization algorithm with the concept of a hypergraph is developed for the optimal sensor’s placement in the structure.
- Multiple structural objectives are incorporated to decide the location preference, and a Pareto front with the non-dominated solutions in the archive is developed.
- A novel relational analysis is developed to determine the new solution’s entry in the archive of the Multi-Objective Hypergraph Particle Swarm Optimization algorithm.
- Fuzzy decision-making is used to obtain the single optimal solution from the archive.
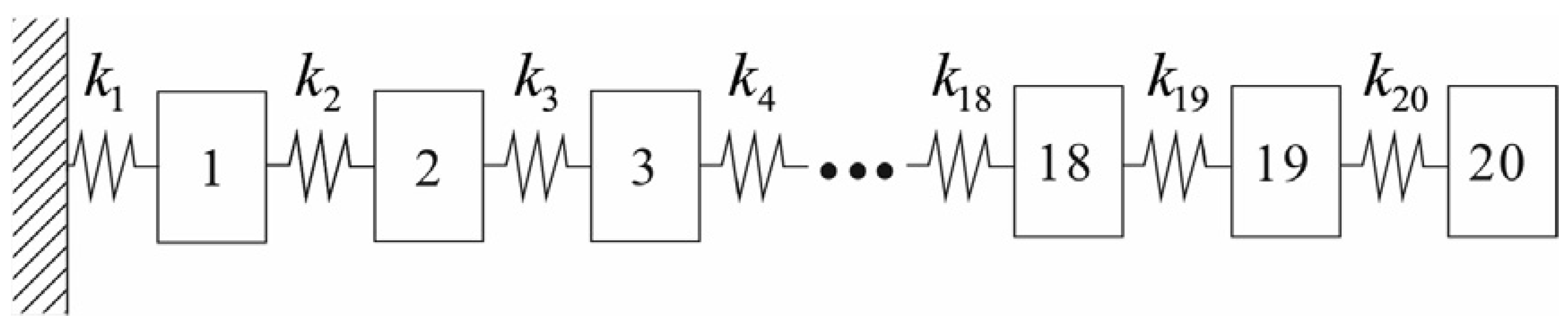
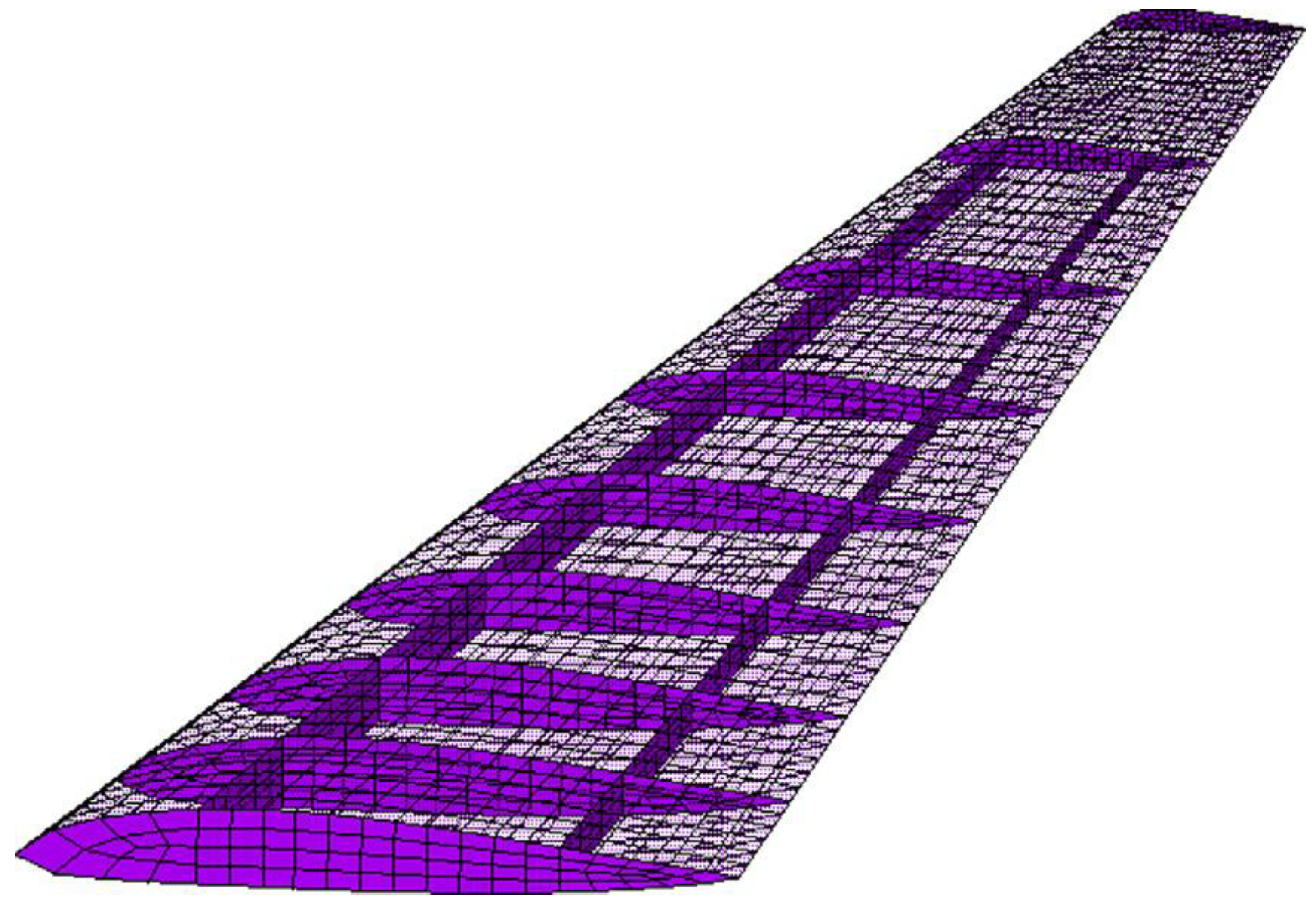
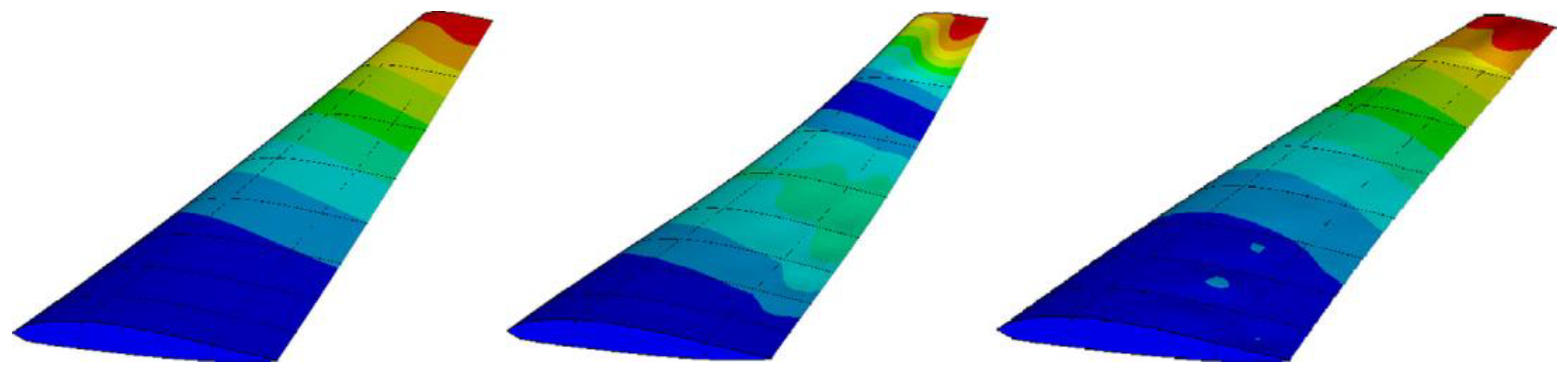
- A spring–mass system and fixed wing of an airplane are used for the analysis.
2. Literature Review
3. Methodology
3.1. Problem Statement
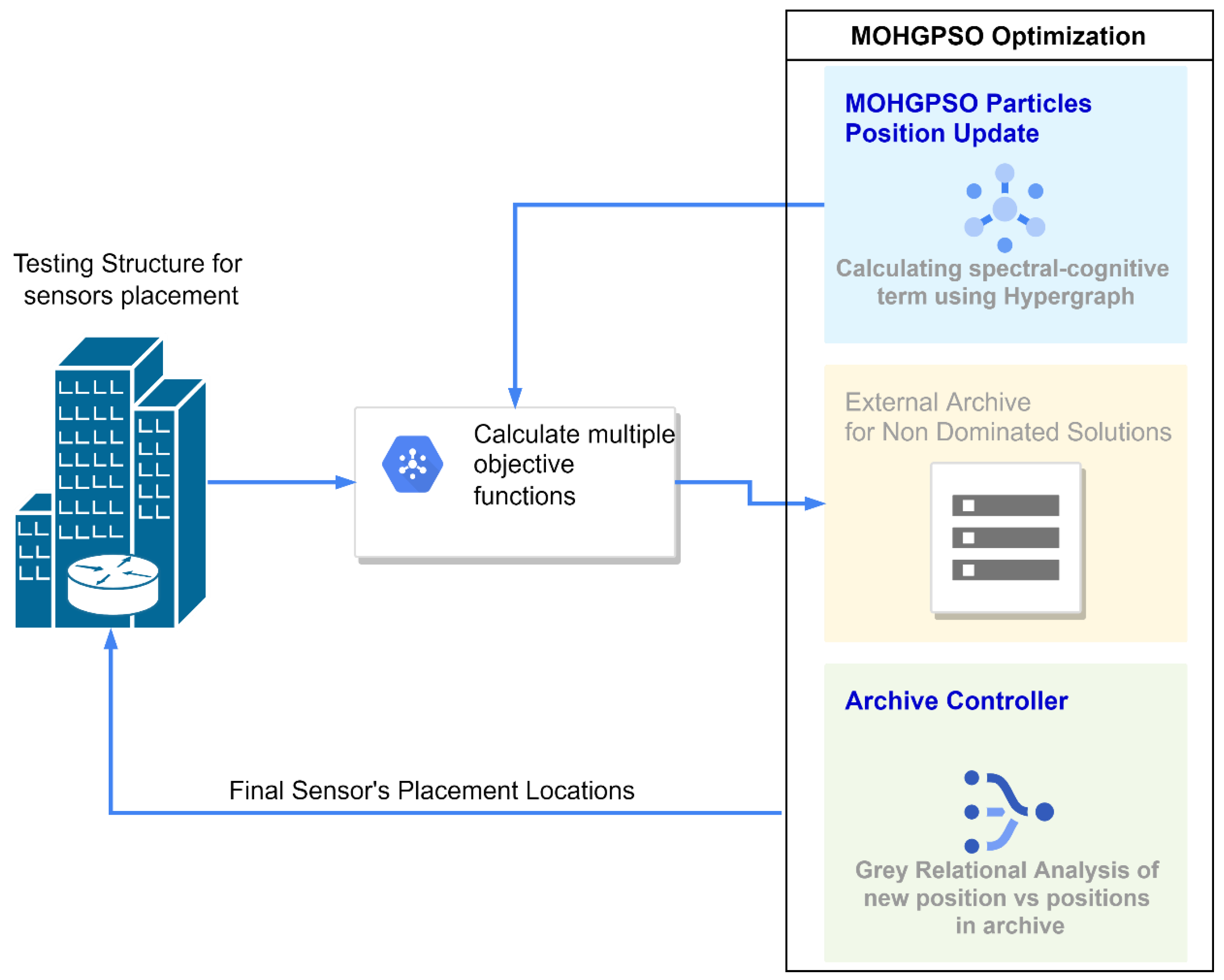
3.2. Proposed Methodology
| Algorithm 1: Coarser pseudocode for the proposed methodology |
| Input: structure information from the FEM analysis, number of sensors Output: optimal locations of the sensors
|
4. Proposed Solution
4.1. Sensor Nodes’ Placement’s Objective Function
4.2. EfI Method
- : n x n matrix of modal shapes
- : its i-th order
- n: candidate sensor positions count
- N: order number
- : the generic modal coordinates
- : its i-th order
- : noise vector
4.3. Driving Point Residue (DPR)
4.4. Average Driving Point Residue (ADPR)
4.5. EfI-DPR Method
4.6. Eigenvalue Vector Product (EVP)
4.7. Mode Shape Summation Plot (MSSP)
4.8. Multi-Objective OSP to Relational Objectives
- Step 1.
- Finding the grey relational grade.
- Step 2.
- Figuring out the grey relational coefficient.
- Step 3.
- Employing the grey relational coefficient in decision making.
| Algorithm 2: Optimality collation of sensor orientations using Grey Relational Analysis |
| Input using Equation (15) using Equation (16) |
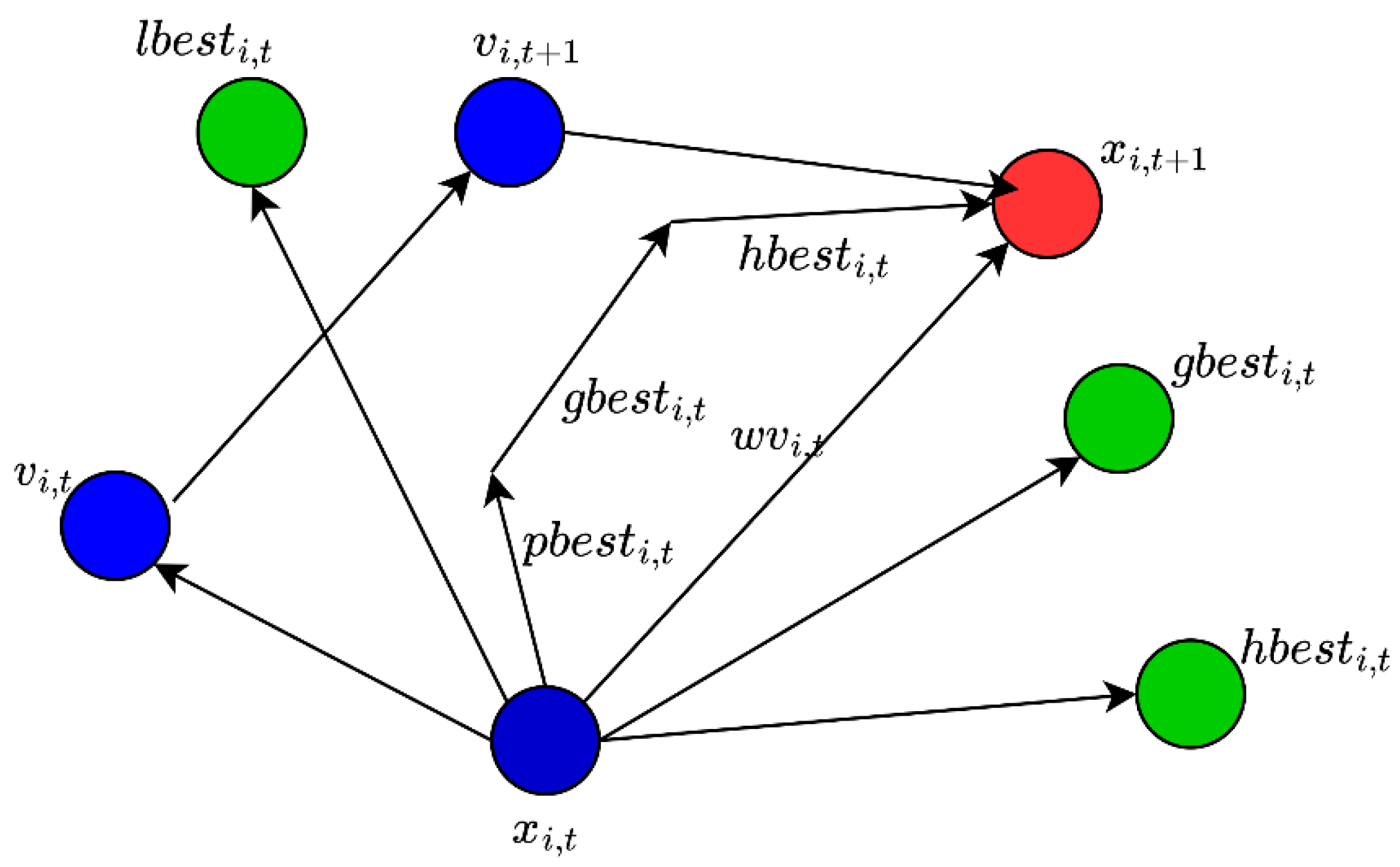
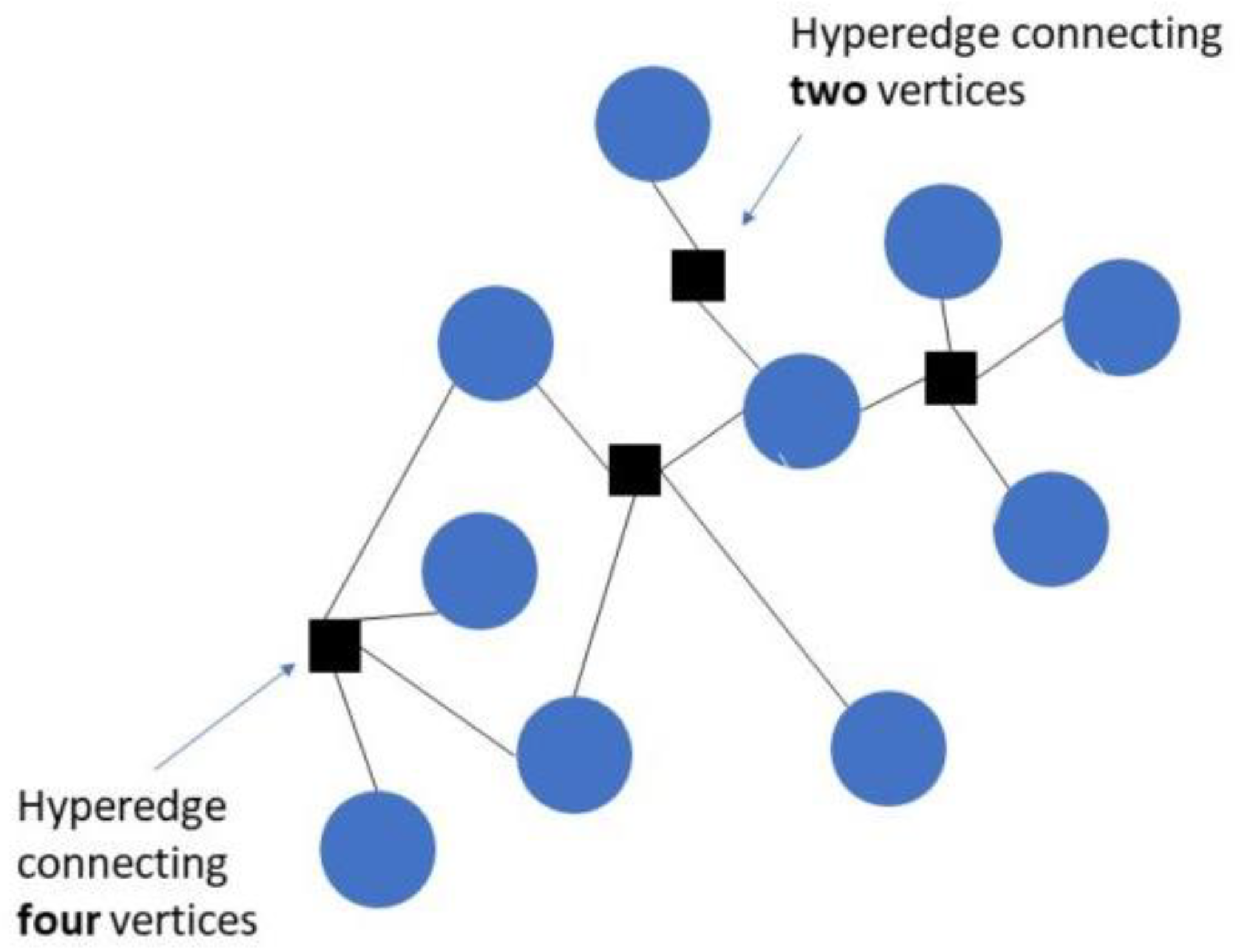
4.9. Multi-Objective Hypergraph Particle Swarm Optimization (MOHGPSO) Algorithm
- (i)
- Global Minimum: For a given function if , and, more importantly, , the global minimum is estimated to be given by
- (ii)
- Pareto Dominance: If two vectors, one represented by and the other by , respectively, are mutually related such that the objective values of are no worse than those of , and are strictly better than the latter for at least one of the obtained solution elements, for any given objective, then vector is said to dominate vector . In a nutshell: , i.e.,
- (iii)
- General Multi-Objective Optimization Problem (MOP) and Pareto Optimal Set: The objective of this approach is to find a vector represented by,
- (iv)
- Pareto Front:
- (v)
- Pareto Optimality: Conventionally, it is evaluated apropos the whole decision variable space (unless otherwise specified). For a point represented by to be Pareto optimal, it is imperative that there exists no realizable vector that can decrease some criterion without causing a simultaneous increase in at least one other criterion. Thus, for every and
- (a)
- The particles in the repository that are best so far and the current position of all particles and their corresponding fitness values are used.
- (b)
- Calculate the best fitness value for each objective in the multi-objective from the repository.
- (c)
- Subtract that best value from each particle’s fitness value.
- (d)
- Generate the adjacency matrix by following the nearest neighbor approach
- (e)
- Use the hypergraph calculation of eigenvalues.
- (f)
- Find the centroid position among all particles by the k-means clustering of eigenvalues calculated in step 5.
4.10. Combination of HGPSO with GRA and FDM for Generating a Pareto Front
| Algorithm 3: SHM Analysis using MOHGPSO, deploying GRA and FDM |
| Input: structure information from the FEM analysis, number of sensors |
| Output: optimal locations of the sensors. |
|
5. Results and Discussions
5.1. Evaluation Parameters
5.1.1. Determinant (DET) of FIM
5.1.2. Mean Value of Off-Diagonal Entries of MAC
5.1.3. Modal Strain Energy (MSE)
5.1.4. SDI
5.1.5. Analysis
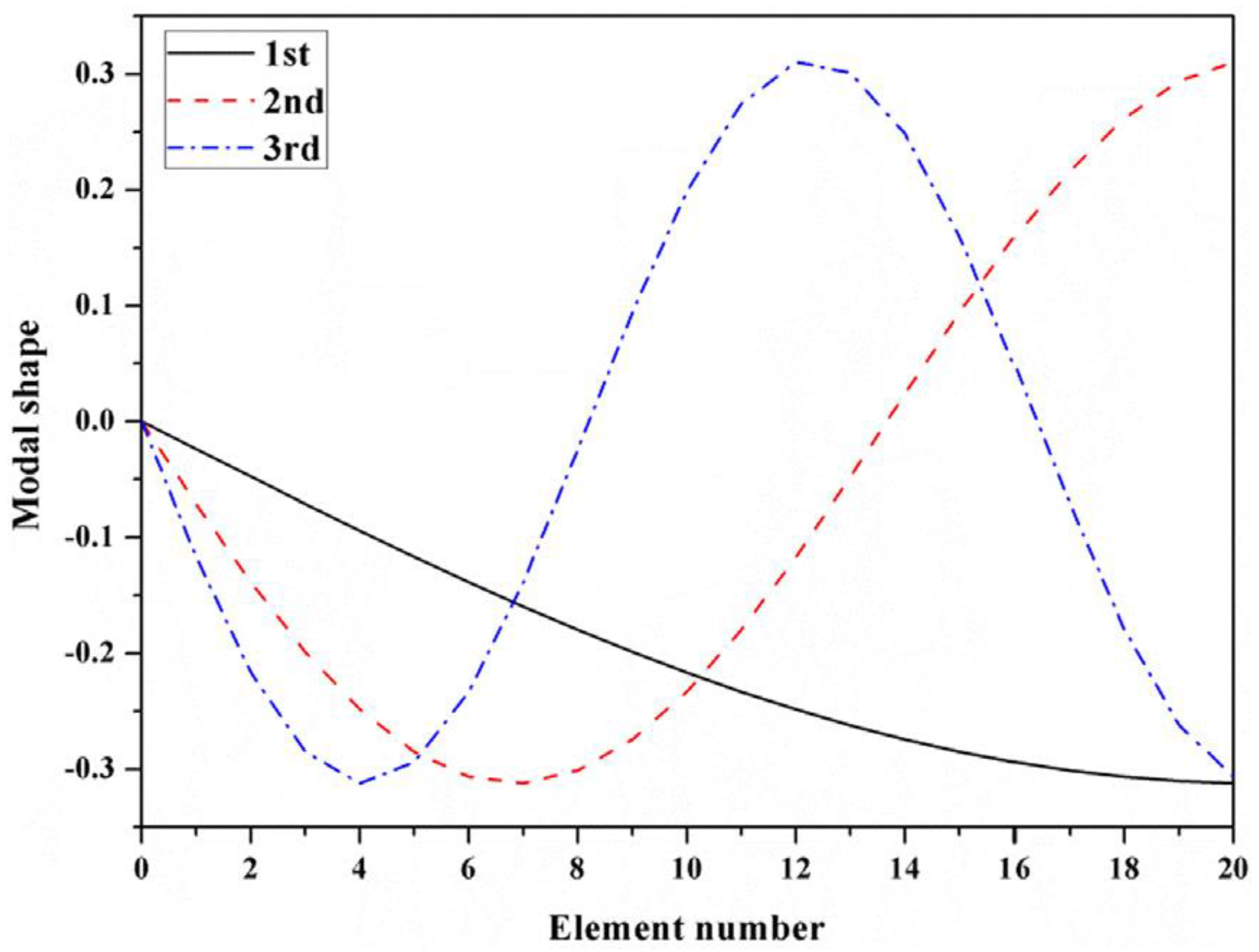
5.2. Spring–Mass System
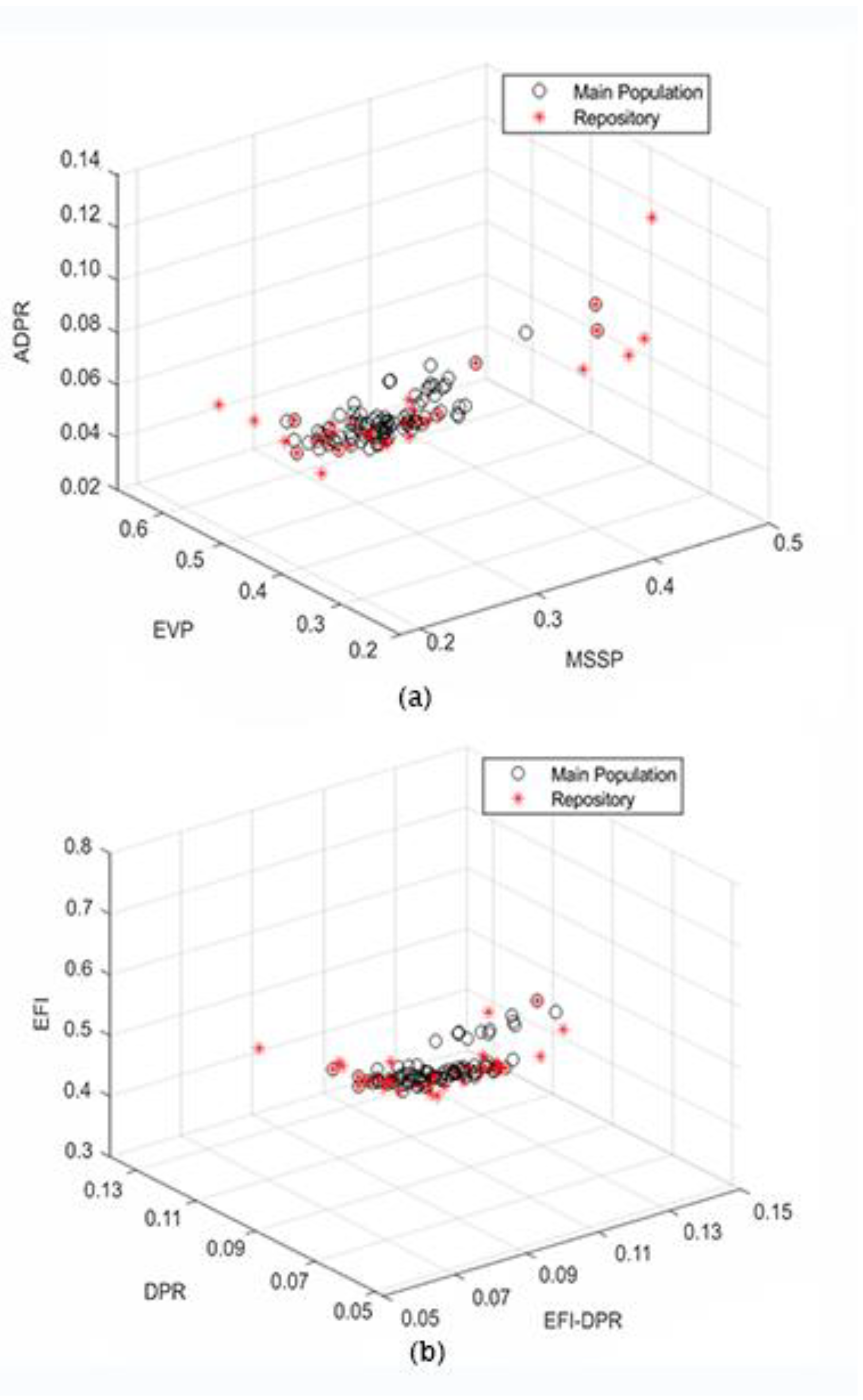
5.3. Fixed Wing
5.4. Optimized Sensor Positions in Fixed Wing Aircraft Experiments
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Seo, J.; Hu, J.W.; Lee, J. Summary Review of Structural Health Monitoring Applications for Highway Bridges. J. Perform. Constr. Facil. 2016, 30, 04015072. [Google Scholar] [CrossRef]
- Das, S.; Saha, P.; Patro, S.K. Vibration-based Damage Detection Techniques Used for Health Monitoring of Structures: A Review. J. Civ. Struct. Health Monit. 2016, 6, 477–507. [Google Scholar] [CrossRef]
- Noel, A.B.; Abdaoui, A.; Elfouly, T.; Ahmed, M.H.; Badawy, A.; Shehata, M. Structural Health Monitoring Using Wireless Sensor Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2017, 19, 1403–1423. [Google Scholar] [CrossRef]
- Catbas, F.N. Structural health monitoring: Applications and data analysis. In Structural Health Monitoring of Civil Infrastructure Systems; Woodhead Publishing: Sawston, UK, 2009; pp. 1–39. [Google Scholar]
- Li, H.-N.; Ren, L.; Jia, Z.; Yi, T.-H.; Li, D. State-of-the-art in Structural Health Monitoring of Large and Complex Civil Infrastructures. J. Civ. Struct. Health Monit. 2016, 6, 3–16. [Google Scholar] [CrossRef]
- Brownjohn, J.M.W. Structural Health Monitoring of Civil Infrastructure. Philos. Trans. R. Soc. 2007, 365, 589–622. [Google Scholar] [CrossRef] [PubMed]
- Olivera López, J.J.; Vergara Reyes, L.; Oyarzo Vera, C. Structural Health Assessment of a R/C Building in the Coastal Area of Concepción, Chile. Procedia Eng. 2017, 199, 2214–2219. [Google Scholar] [CrossRef]
- Yan, K.; Zhang, Y.; Yan, Y.; Xu, C.; Zhang, S. Fault Diagnosis Method of Sensors in Building Structural Health Monitoring System Based on Communication Load Optimization. Comput. Commun. 2020, 159, 310–316. [Google Scholar] [CrossRef]
- Roghaei, M.; Zabihollah, A. An Efficient and Reliable Structural Health Monitoring System for Buildings After Earthquake. APCBEE Procedia 2014, 9, 309–316. [Google Scholar] [CrossRef]
- Zhou, C.; Chase, J.G.; Rodgers, G.W.; Huang, B.; Xu, C. Effective Stiffness Identification for Structural Health Monitoring of Reinforced Concrete Building Using Hysteresis Loop Analysis. Procedia Eng. 2017, 199, 1074–1079. [Google Scholar] [CrossRef]
- Pierdicca, A.; Clementi, F.; Mezzapelle, P.A.; Fortunati, A.; Lenci, S. One-year Monitoring of a Reinforced Concrete School Building: Evolution of Dynamic Behavior During Retrofitting Works. Procedia Eng. 2017, 199, 2238–2243. [Google Scholar] [CrossRef]
- Antunes, P.; Lima, H.; Varum, H.; André, P. Optical Fiber Sensors for Static and Dynamic Health Monitoring of Civil Engineering Infrastructures: Abode Wall Case Study. Measurement 2012, 45, 1695–1705. [Google Scholar] [CrossRef]
- Sajedi, S.O.; Liang, X. A Data-driven Framework for Near Real-time and Robust Damage Diagnosis of Building Structures. Struct. Control Health Monit. 2020, 27, e2488. [Google Scholar] [CrossRef]
- Gao, W.; Li, H.-N.; Ho, S.C.M. A Novel Embeddable Tubular Piezoceramics-based Smart Aggregate for Damage Detection in Two-dimensional Concrete Structures. Sensors 2019, 19, 1501. [Google Scholar] [CrossRef] [PubMed]
- Chatzis, M.N.; Chatzi, E.; Smyth, A.W. An Experimental Validation of Time Domain System Identification Methods with Fusion of Heterogeneous Data. Earthq. Eng. Struct Dyn. 2015, 44, 523–547. [Google Scholar] [CrossRef]
- Soltaninejad, M.; Soroushian, S.; Livani, H. Application of Short-time Matrix Pencil Method for High-frequency Damage Detection in Structural System. Struct. Control Health Monit. 2020, 27, e2589. [Google Scholar] [CrossRef]
- García-Macías, E.; Ubertini, F. Automated Operational Modal Analysis and Ambient Noise Deconvolution Interferometry for the Full Structural Identification of Historic Towers: A Case Study of the Sciri Tower in Perugia, Italy. Eng. Struct. 2020, 215, 110615. [Google Scholar] [CrossRef]
- Sun, H.; Al-Qazweeni, J.; Parol, J.; Kamal, H.; Chen, Z.; Buyukozturk, O. Computational Modeling of a Unique Tower in Kuwait for Structural Health Monitoring: Numerical Investigations. Struct. Control Health Monit. 2019, 26, e2317. [Google Scholar] [CrossRef]
- Morales-Valdez, J.; Alvarez-Icaza, L.; Escobar, J.A. Damage Localization in a Building Structure During Seismic Excitation. Shock Vib. 2020, 2020, 8859527. [Google Scholar] [CrossRef]
- Valinejadshoubi, M.; Bagchi, A.; Moselhi, O. Development of a Bim-based Data Management System for Structural Health Monitoring with Application to Modular Buildings: Case Study. J. Comput. Civ. Eng. 2019, 33, 05019003. [Google Scholar] [CrossRef]
- Pachón, P.; Infantes, M.; Cámara, M.; Compán, V.; García-Macías, E.; Friswell, M.I.; Castro-Triguero, R. Evaluation of Optimal Sensor Placement Algorithms for the Structural Health Monitoring of Architectural Heritage. Application to the Monastery of San Jerónimo De Buenavista (Seville, Spain). Eng. Struct. 2020, 202, 109843. [Google Scholar] [CrossRef]
- García-Macías, E.; Ubertini, F. MOVA/MOSS: Two Integrated Software Solutions for Comprehensive Structural Health Monitoring of Structures. Mech. Syst. Signal Process. 2020, 143, 106830. [Google Scholar] [CrossRef]
- Yang, C. An Adaptive Sensor Placement Algorithm for Structural Health Monitoring Based on Multi-objective Iterative Optimization Using Weight Factor Updating. Mech. Syst. Signal Process. 2021, 151, 107363. [Google Scholar] [CrossRef]
- Papadimitriou, C. Pareto Optimal Sensor Locations for Structural Identification. Comput. Methods Appl. Mech. Eng. 2005, 194, 1655–1673. [Google Scholar] [CrossRef]
- Kammer, D.C. Effect of Model Error on Sensor Placement for On-orbit Modal Identification of Large Space Structures. J. Guid. Control. Dyn. 1992, 15, 334–341. [Google Scholar] [CrossRef]
- Bin Zahid, F.; Ong, Z.C.; Khoo, S.Y. A Review of Operational Modal Analysis Techniques for In-service Modal Identification. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 398. [Google Scholar] [CrossRef]
- Stecher, J.L. Space Mission Success through Testing. In Proceedings of the Eighteenth Space Simulation Conference, Baltimore, MD, USA, 31 October 1994; Volume 3280. [Google Scholar]
- Pereira, J.L.J.; Francisco, M.B.; de Oliveira, L.A.; Chaves, J.A.S.; Cunha, S.S.; Gomes, G.F. Multi-objective Sensor Placement Optimization of Helicopter Rotor Blade Based on Feature Selection. Mech. Syst. Signal Process. 2022, 180, 109466. [Google Scholar] [CrossRef]
- Meo, M.; Zumpano, G. On the Optimal Sensor Placement Techniques for a Bridge Structure. Eng. Struct. 2005, 27, 1488–1497. [Google Scholar] [CrossRef]
- Peterson, L.D.; Doebling, S.W.; Alvin, K.F. Experimental Determination of Local Structural Stiffness by Disassembly of Measured Flexibility Matrices. In Proceedings of the 36th Structures, Structural Dynamics and Materials Conference, New Orleans, LA, USA, 10–13 April 1995. [Google Scholar]
- Ručevskis, S.; Rogala, T.; Katunin, A. Optimal Sensor Placement for Modal-Based Health Monitoring of a Composite Structure. Sensors 2022, 22, 3867. [Google Scholar] [CrossRef]
- Ding, L.; Yilmaz, A. Interactive Image Segmentation Using Probabilistic Hypergraphs. Pattern Recognit. 2010, 43, 1863–1873. [Google Scholar] [CrossRef]
- Jin, M.; Wang, H.; Zhang, Q. Association Rules Redundancy Processing Algorithm Based on Hypergraph in Data Mining. Clust. Comput. 2019, 22, 8089–8098. [Google Scholar] [CrossRef]
- Arya, D.; Worring, M. Exploiting Relational Information in Social Networks Using Geometric Deep Learning on Hypergraphs. In Proceedings of the ACM on International Conference on Multimedia Retrieval, Yokohama, Japan, 11–14 June 2018; pp. 117–125. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1st | 2nd | 3rd | |
|---|---|---|---|
| Spring–mass system | 0.387 cycles/s (Hz) | 1.14 cycles/s (Hz) | 1.93 cycles/s (Hz) |
| Fixed Wing | 24.3 cycles/s (Hz) | 84.1 cycles/s (Hz) | 141 cycles/s (Hz) |
| Sensor Positions | DET | MAC | MSE | SDI | RSP | |
|---|---|---|---|---|---|---|
| Effective Independence | 5, 6, 12, 13, 20 | 0.031 | 0.003 | 489.814 | 0.343 | 0.366 |
| Driving Point Residue | 16, 17, 18, 19, 20 | 0.000 | 0.786 | 77.774 | 0.255 | 0.568 |
| Average DPR | 16, 17, 18, 19, 20 | 0.000 | 0.786 | 77.774 | 0.255 | 0.568 |
| EFI-DPR | 12, 17, 18, 19, 20 | 0.000 | 0.571 | 254.940 | 0.481 | 0.599 |
| Eigenvalue Vector Product | 10, 11, 18, 19, 20 | 0.001 | 0.437 | 258.365 | 0.203 | 0.534 |
| Mode Shape Summation Plot | 5, 11, 18, 19, 20 | 0.021 | 0.292 | 445.806 | 0.637 | 0.601 |
| Novel Sensor Placement Algorithm [23] | 5, 6, 11, 12, 20 | 0.030 | 0.014 | 490.155 | 0.332 | 0.433 |
| MOHGPSO (proposed) | 12, 17, 4, 1, 6 | 0.031 | 0.013 | 491.009 | 0.331 | 0.431 |
| Features | SDI | RSP | |
|---|---|---|---|
| Effective Independence | 1.301 | 0.684 | 0.432 |
| Driving Point Residue | 0 | 0.144 | 0.784 |
| Average DPR | 0 | 0.144 | 0.784 |
| EFI-DPR | 0 | 0.143 | 0.784 |
| Eigenvalue Vector Product | 0 | 0.144 | 0.784 |
| Mode Shape Summation Plot | 0 | 0.144 | 0.784 |
| Novel Sensor Placement Algorithm | 1.268 | 0.144 | 0.784 |
| (Proposed) MOHGPSO | 1.266 | 0.143 | 0.786 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Waqas, M.; Jan, L.; Zafar, M.H.; Hassan, S.R.; Asif, R. A Sensor Placement Approach Using Multi-Objective Hypergraph Particle Swarm Optimization to Improve Effectiveness of Structural Health Monitoring Systems. Sensors 2024, 24, 1423. https://doi.org/10.3390/s24051423
Waqas M, Jan L, Zafar MH, Hassan SR, Asif R. A Sensor Placement Approach Using Multi-Objective Hypergraph Particle Swarm Optimization to Improve Effectiveness of Structural Health Monitoring Systems. Sensors. 2024; 24(5):1423. https://doi.org/10.3390/s24051423
Chicago/Turabian StyleWaqas, Muhammad, Latif Jan, Mohammad Haseeb Zafar, Syed Raheel Hassan, and Rameez Asif. 2024. "A Sensor Placement Approach Using Multi-Objective Hypergraph Particle Swarm Optimization to Improve Effectiveness of Structural Health Monitoring Systems" Sensors 24, no. 5: 1423. https://doi.org/10.3390/s24051423