
Extending the Framework for Developing Intelligent Virtual Environments (FIVE) with Artifacts for Modeling Internet of Things Devices and a New Decentralized Federated Learning Based on Consensus for Dynamic Networks
 , , , and
, , , and 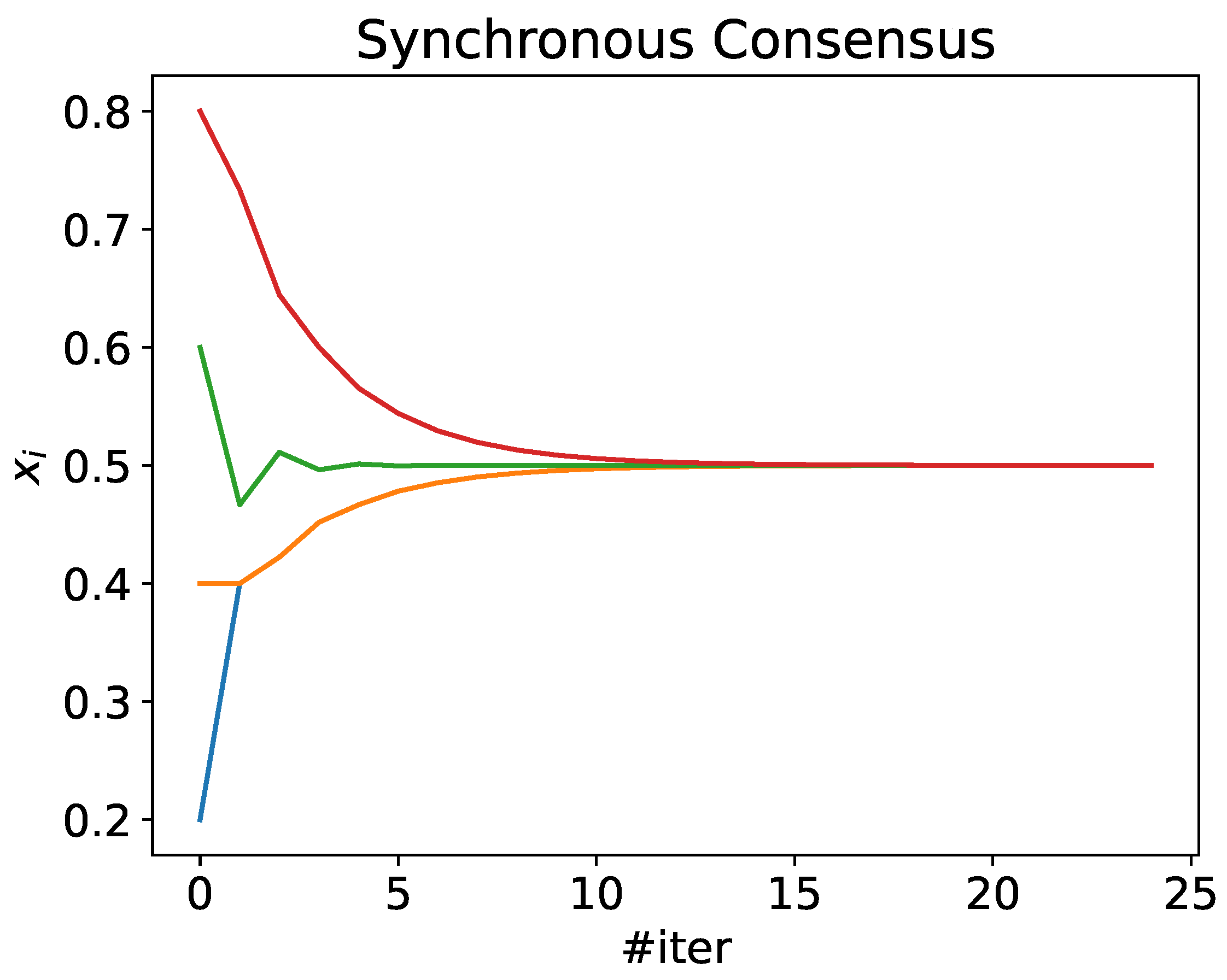{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. State of the Art
2.1. Artifacts
2.2. Intelligent Virtual Environments
2.3. Digital Twins
- Digital Model: there is no automatic data exchange between the physical and virtual environments.
- Digital Shadow: information flows from the physical to the virtual world.
- Digital Twin: where information flows in both directions and changes in one world affect the other. A digital twin would therefore be a computer system that accurately reflects a physical object or process and is capable of reacting in real time to the same inputs that its real twin receives, undergoing the same changes and producing the same responses as its real twin. In a way, a digital twin would be interchangeable with its real model in studying its behavior and in decision making.
- Crops: monitoring, resource optimization, and cultivation support.
- Urban: controlled environment and aquaponic farming.
- Livestock farming: monitoring, management, and optimization.
- Product design: smart services and machinery management.
- Supply and value chains: This includes environmental condition management or the use of DT to evaluate and improve the performance of value chains.
- Policy, environment, and infrastructure: DTs to facilitate policy decisions related to agriculture based on data collected in real time.
2.4. Federated Learning
2.5. Consensus in Multi-Agent Systems
3. GTG-CoL
3.1. Problem Definition
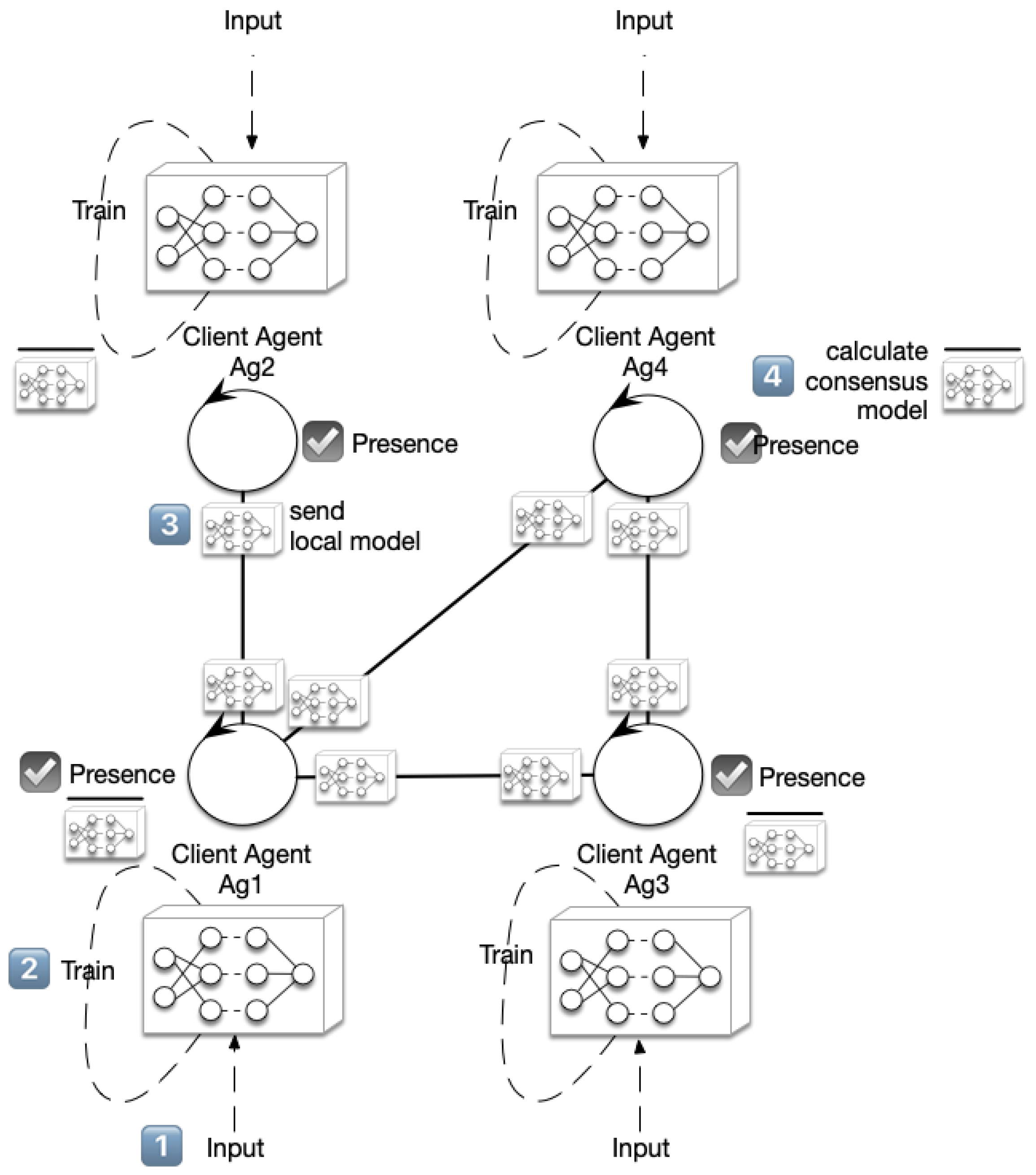
3.2. Co-Learning Algorithm
| Algorithm 1 —Co-Learning Algorithm for agent |
 |
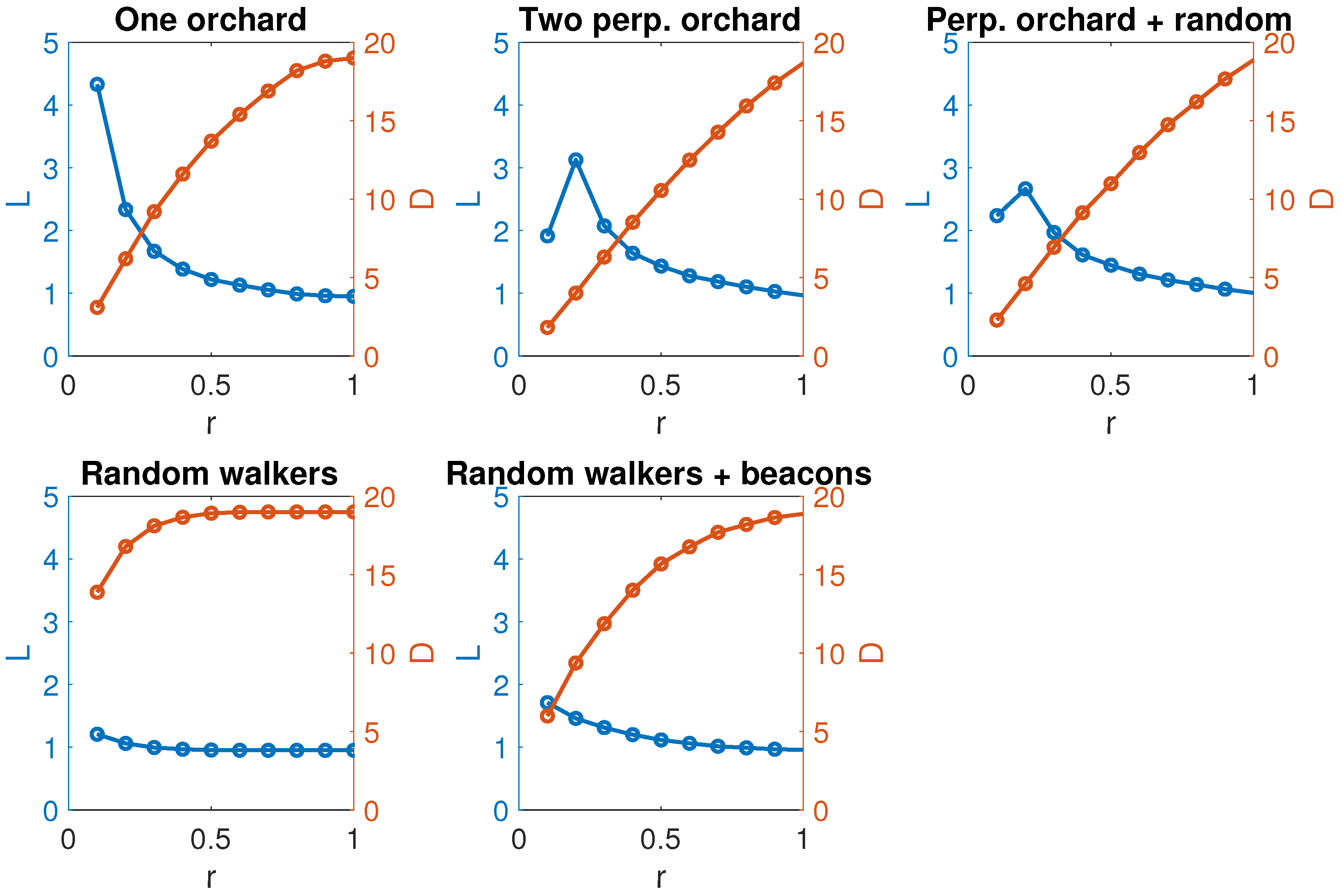
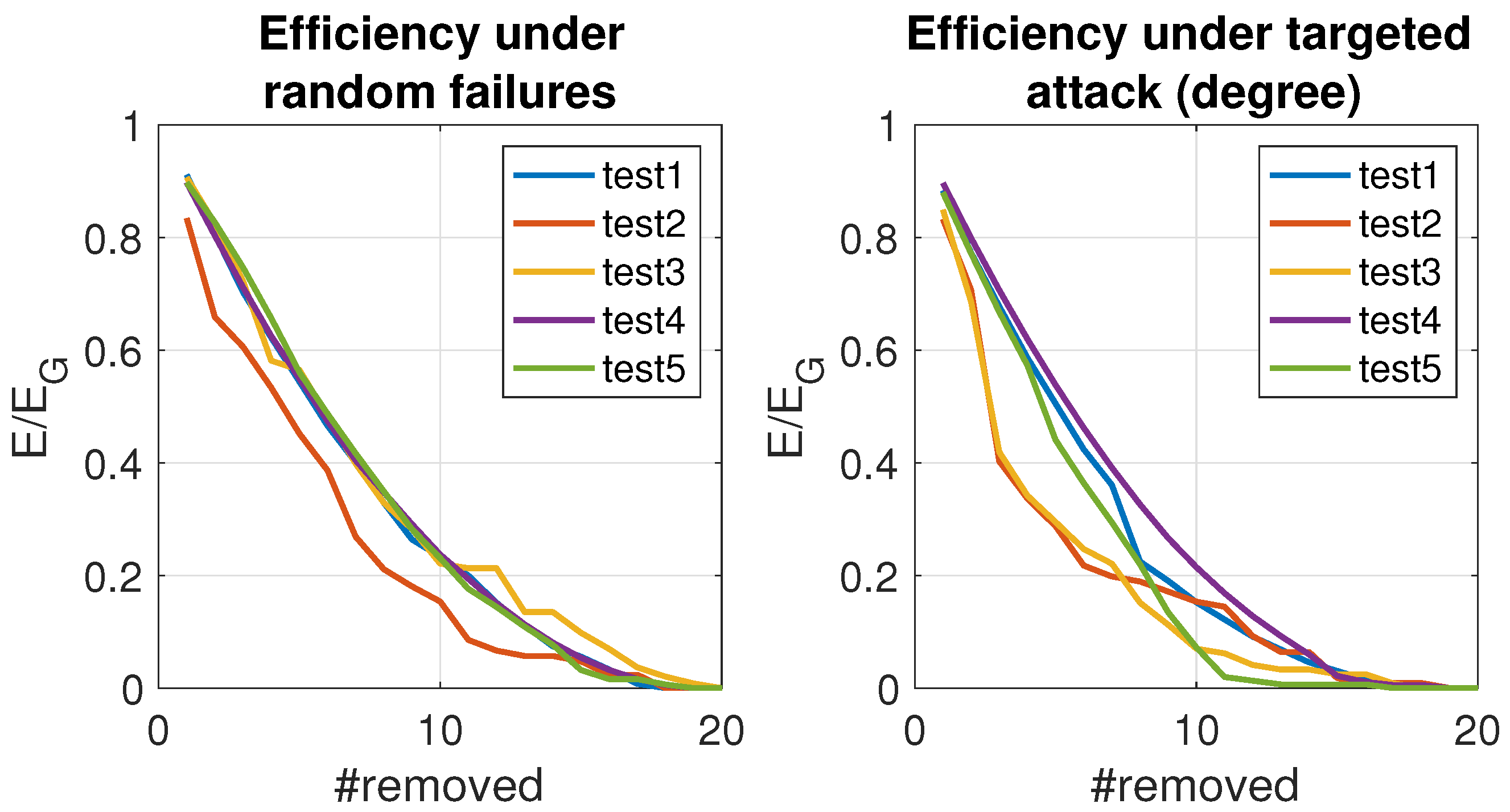
3.3. Network Characterization for WANETs
- Test 1:
- one orchard with all robots running over parallel end-to-end lines.
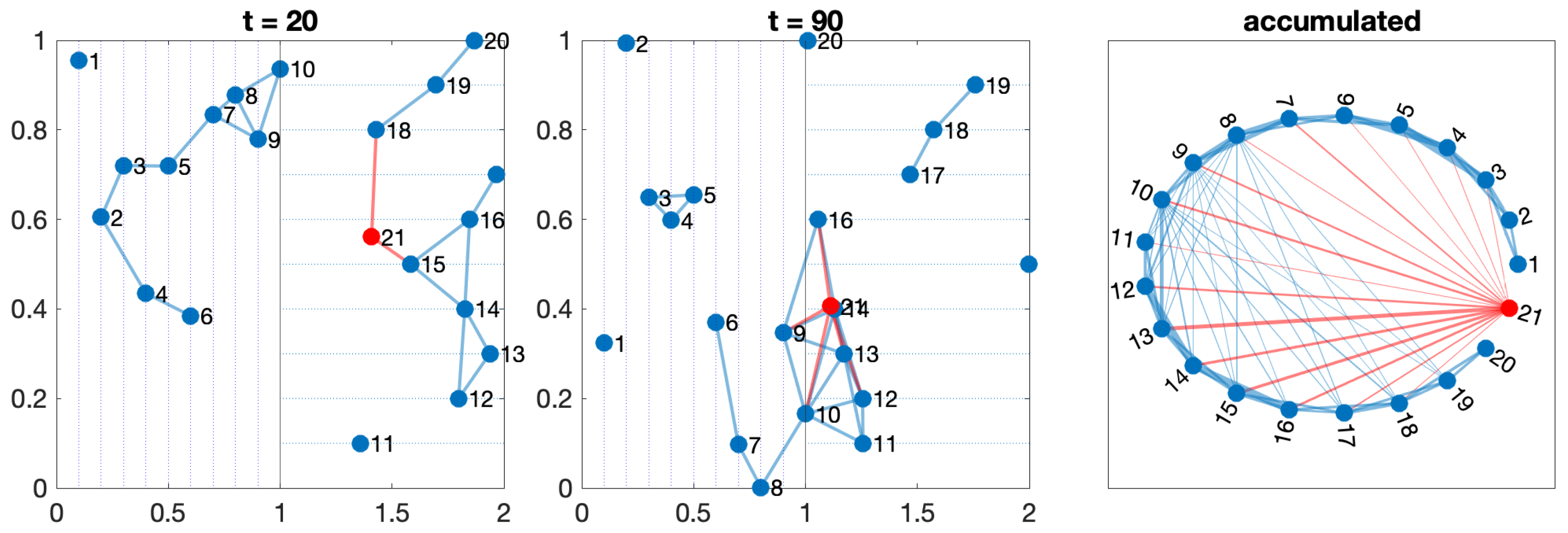
- Test 2:
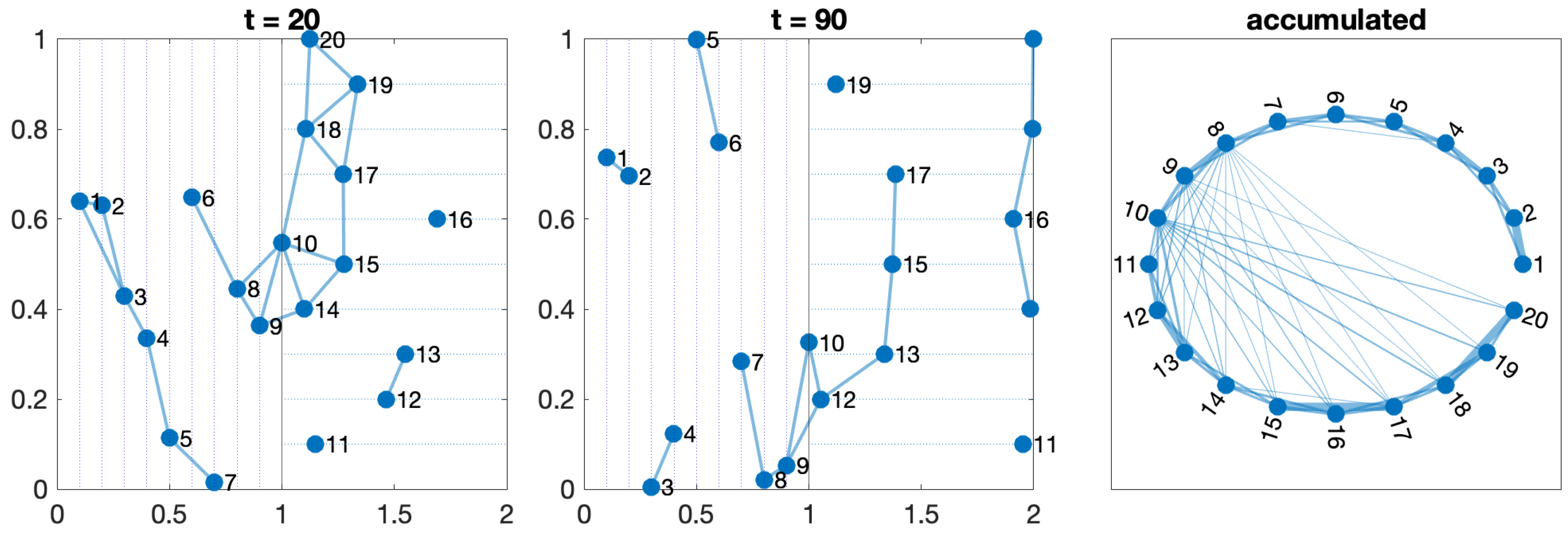
- two orchards next to each other, with agents moving perpendicularly.
- Test 3:
- Test 2 + one extra agent that moves following a random walk.
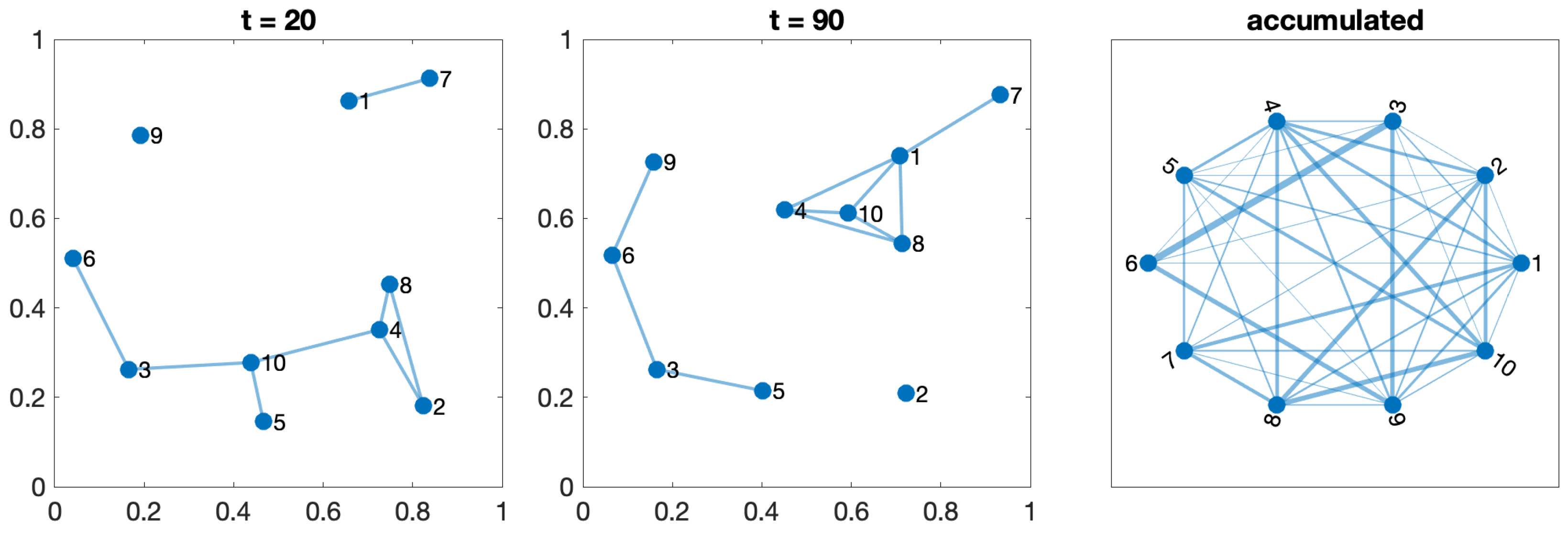
- Test 4:
- one orchard with all agents moving following a cyclic random walk.
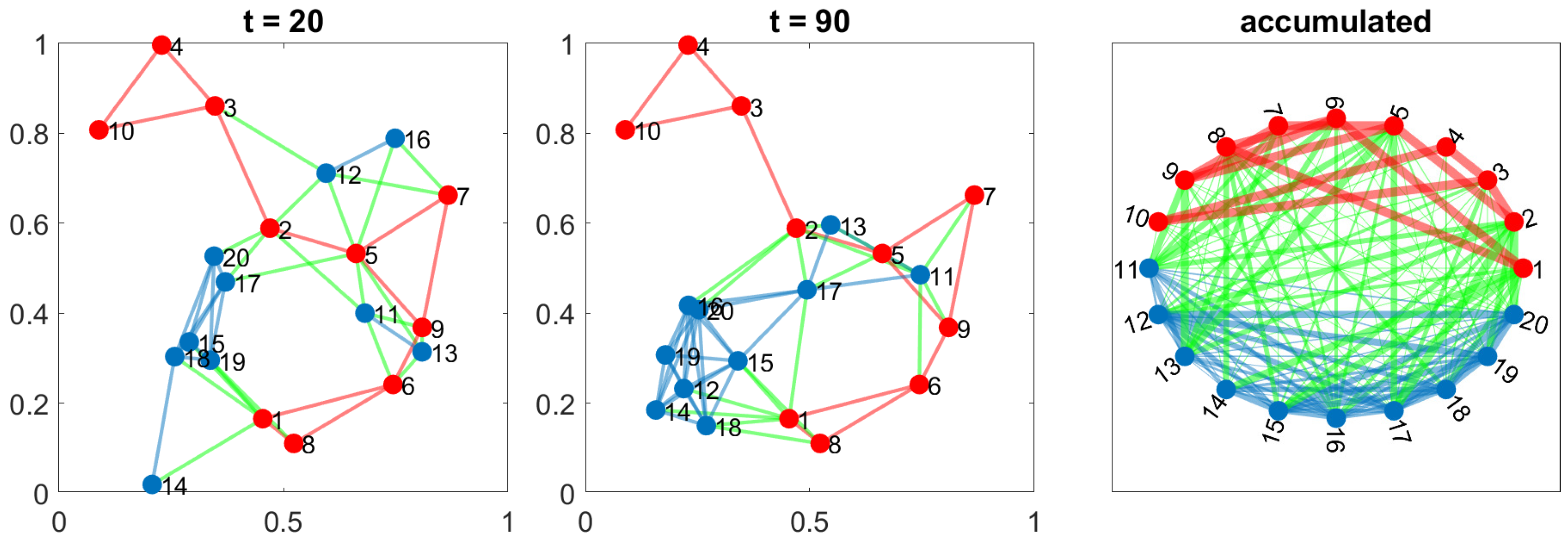
- Test 5:
- Test 4 + a static network of beacons.
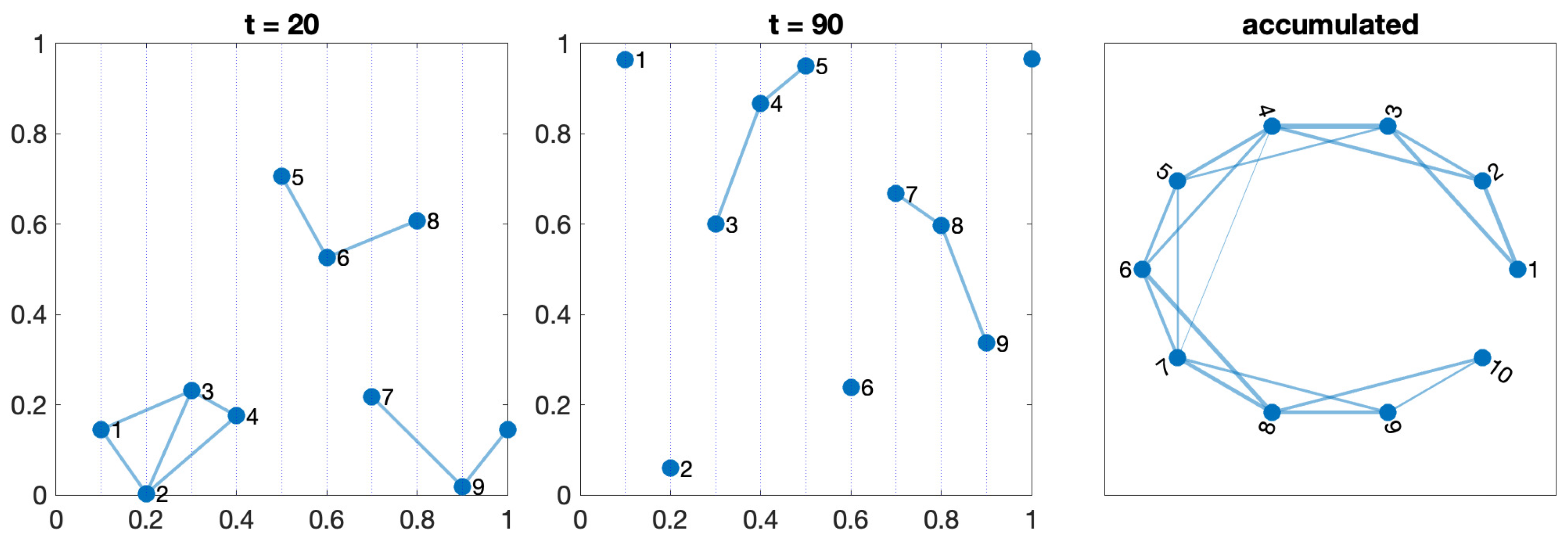
- As the chosen topologies are RGGs, the area is defined as a unit square when just one orchard is simulated (tests 1, 4, and 5). For those tests involving two orchards (tests 2 and 3), the complete area is formed by two adjacent unit squares.
- Agents with rectilinear movement run with random speeds. Lanes are equispaced in their corresponding unit square.
- Random walks are generated with a variable speed in the interval and a random angle in
- The static beacon network (test 5) is generated as an RGG with the same parameters as the dynamic networks and a connection radius . (This radius provides the best performance, as can be seen in Figure 8).
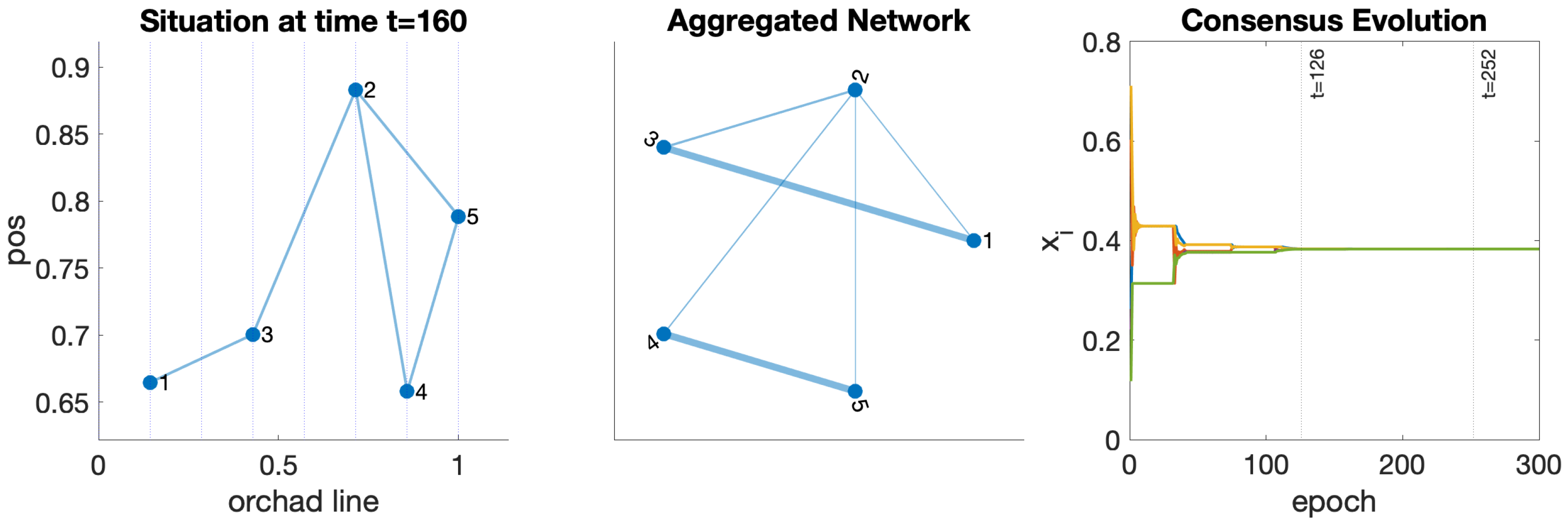
- The weights in the aggregated network correspond to the number of times two agents have been connected.
- All tests run over 200 iterations.
3.3.1. Test 1—One Orchard

3.3.2. Test 2—Two Perpendicular Orchards

3.3.3. Test 3—Two Perpendicular Orchards and a Free Agent

3.3.4. Test 4—All Drones Are Modeled as Random Walkers

3.3.5. Test 5—Drones with Static Beacons’ Network

3.3.6. Comparing the Scenarios


4. Orchard Digital Model for Validating WANET Designs
4.1. FIVE
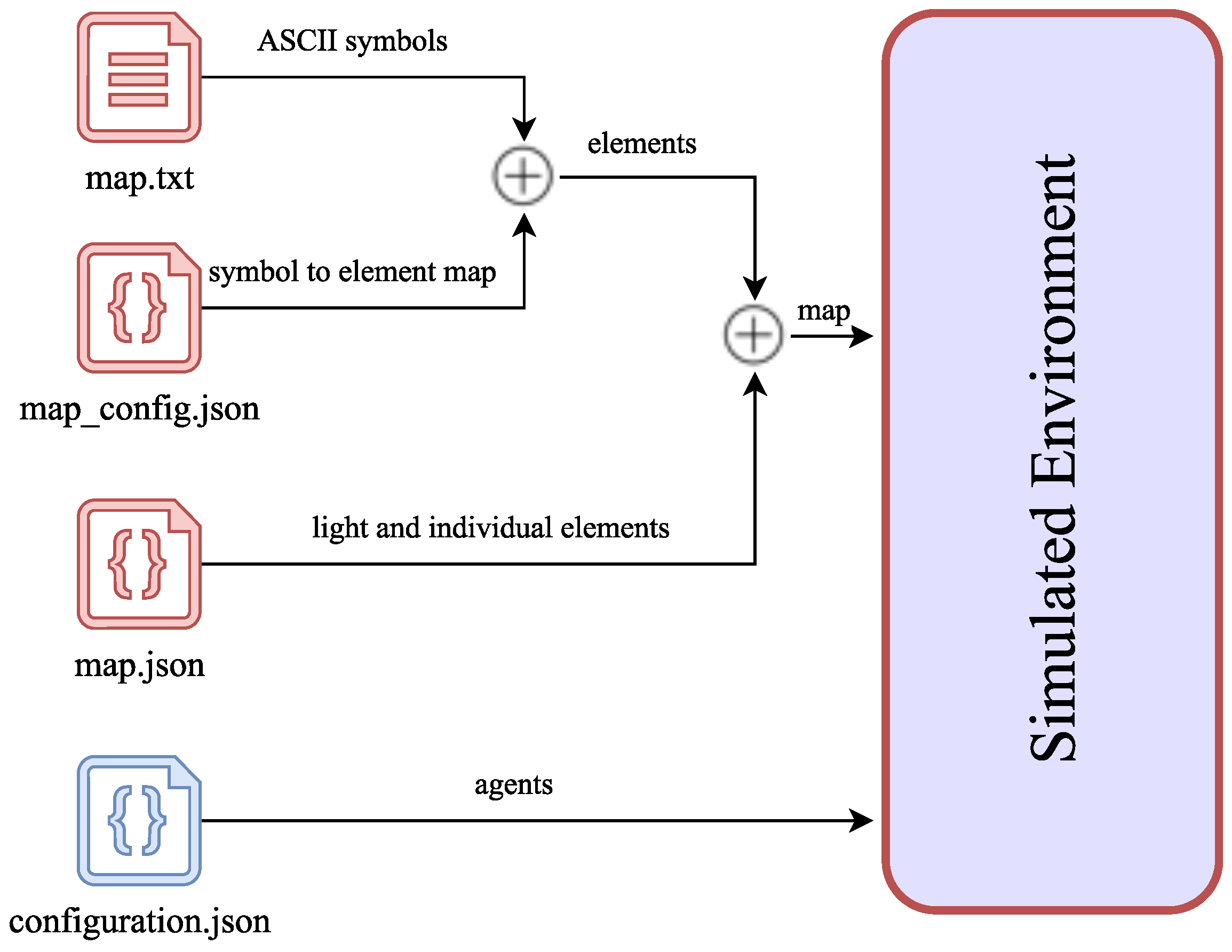
4.1.1. FIVE Designer

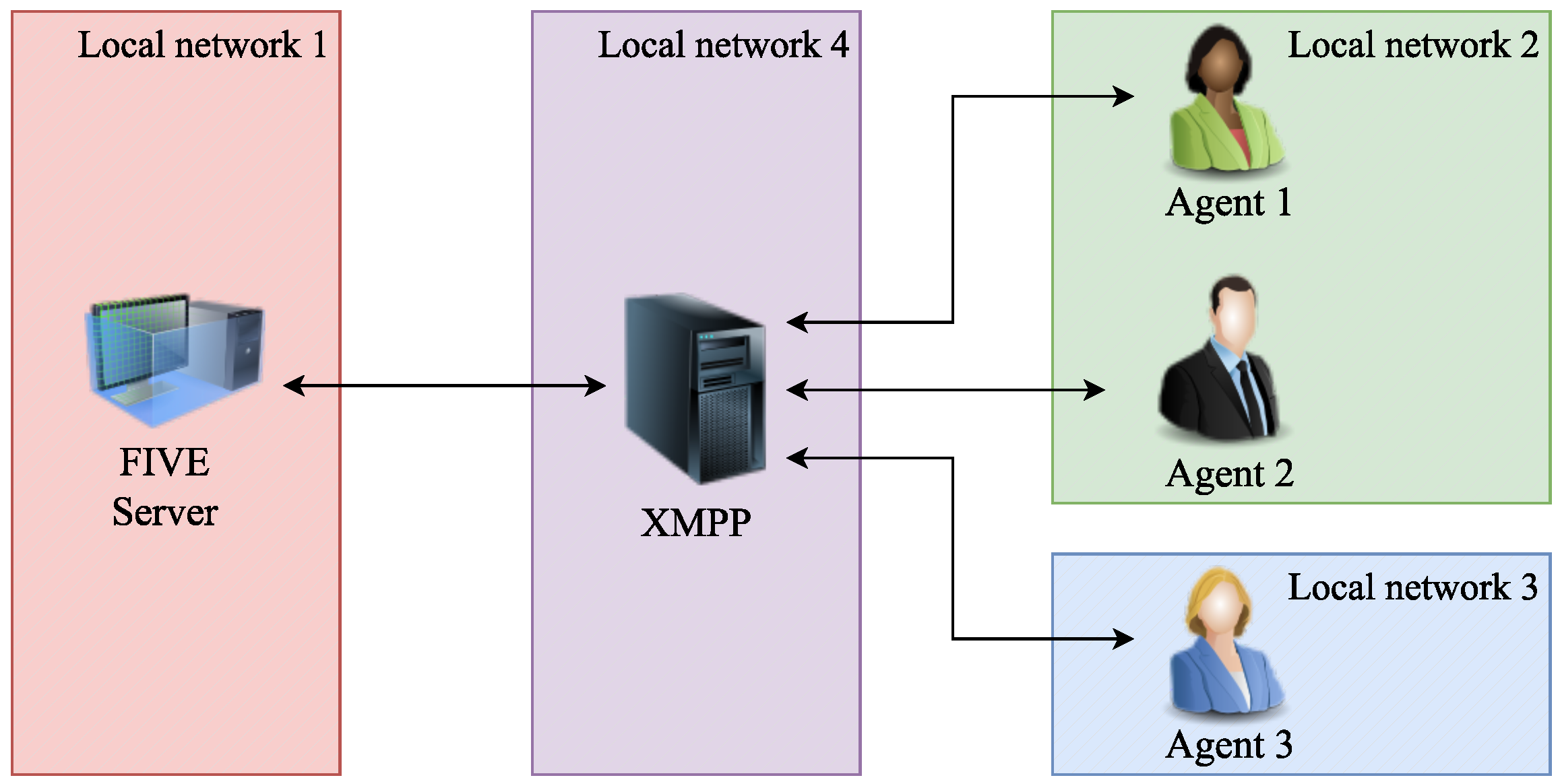
4.1.2. FIVE Execution System
- The XMPP (Extensible Messaging and Presence Protocol) server enables communication between the agents and the environment.
- The FIVE Server Agent, which is developed using the Unity (Bellevue, WA, USA, https://unity.com, accessed on 1 February 2024) engine.
- A collection of SPADE inhabitant agents that populate the IVE.

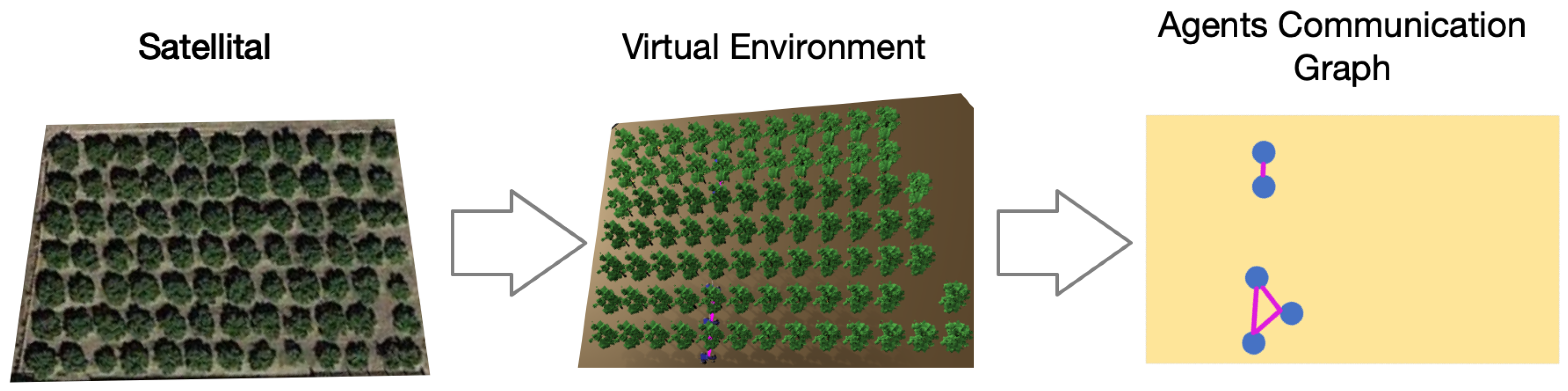
5. Case Study: A Simulation of Fruit Orchard Smart Areas



6. Including Artifacts into FIVE
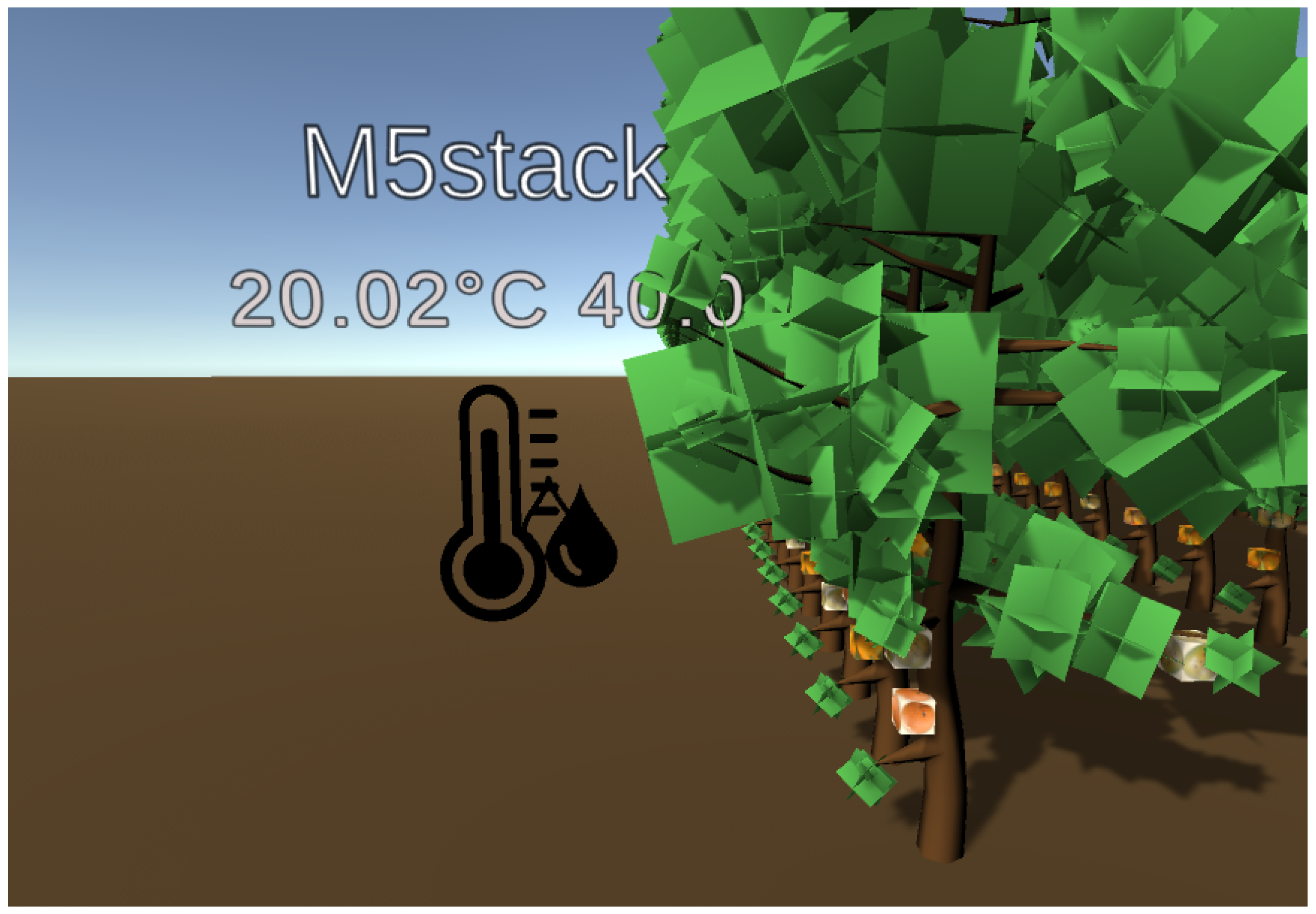
6.1. Incorporating an IoT Artifact into the IVE
6.2. Software Description
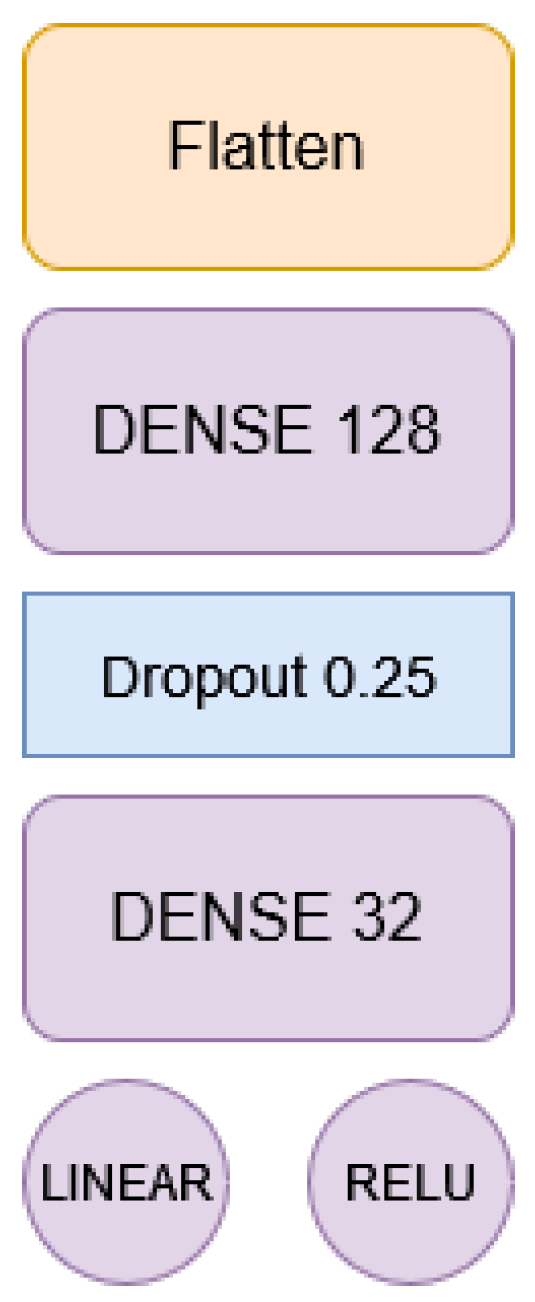
- An initial flattened layer that reduces the input tensor (with dimensions ) to a vector of 72 elements.
- A dense layer of 128 neurons with a ReLU activation function, contributing 9344 parameters.
- Dropout with a probability of 0.25 for better model generalization.
- A dense layer of 32 neurons with a ReLU activation function, contributing 4128 parameters.
- An output neuron with a linear activation function for temperature.
- An output neuron with a ReLU activation function for humidity.

6.3. Integration in FIVE

7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rebollo, M.; Rincon, J.; Hernández, L.; Enguix, F.; Carrascosa, C. GTG-CoL: A New Decentralized Federated Learning Based on Consensus for Dynamic Networks. In Proceedings of the International Conference on Practical Applications of Agents and Multi-Agent Systems, Guimarães, Portugal, 12–14 July 2023; pp. 284–295. [Google Scholar]
- Bradonjic, M.; Kong, J. Wireless ad hoc networks with tunable topology. In Proceedings of the 45th Annual Allerton Conference on Communication, Control and Computing, Monticello, IL, USA, 26–28 September 2007. [Google Scholar]
- Masuda, N.; Miwa, H.; Konno, N. Geographical threshold graphs with small-world and scale-free properties. Phys. Rev. E 2005, 71, 036108. [Google Scholar] [CrossRef] [PubMed]
- Bradonjić, M.; Hagberg, A.; Percus, A.G. The structure of geographical threshold graphs. Internet Math. 2008, 5, 113–139. [Google Scholar] [CrossRef]
- Brendan McMahan, H.; Moore, E.; Ramage, D.; Hampson, S.; Agüera y Arcas, B. Communication-efficient learning of deep networks from decentralized data. In Proceedings of the Artificial Intelligence and Statistics, Fort Lauderdale, FL, USA, 20–22 April 2017; pp. 1273–1282. [Google Scholar]
- Carrascosa, C.; Rincón, J.; Rebollo, M. Co-Learning: Consensus-based Learning for Multi-Agent Systems. In Proceedings of the Advances in Practical Applications of Agents, Multi-Agent Systems, and Complex Systems Simulation, the PAAMS Collection, L’Aquila, Italy, 13–15 July 2022; pp. 63–75. [Google Scholar]
- Palanca, J.; Terrasa, A.; Julian, V.; Carrascosa, C. SPADE 3: Supporting the New Generation of Multi-Agent Systems. IEEE Access 2020, 8, 182537–182549. [Google Scholar] [CrossRef]
- Luck, M.; Aylett, R. Applying artificial intelligence to virtual reality: Intelligent virtual environments. Appl. Artif. Intell. 2000, 14, 3–32. [Google Scholar] [CrossRef]
- Omicini, A.; Ricci, A.; Viroli, M. Artifacts in the A&A meta-model for multi-agent systems. Auton. Agents Multi-Agent Syst. 2008, 17, 432–456. [Google Scholar]
- Boissier, O.; Bordini, R.H.; Hübner, J.F.; Ricci, A.; Santi, A. Multi-agent oriented programming with JaCaMo. Sci. Comput. Program. 2013, 78, 747–761. [Google Scholar] [CrossRef]
- Burattini, S.; Ciortea, A.; Galassi, M.; Ricci, A. Towards Framing the Agents & Artifacts Conceptual Model at the Knowledge Level: First Ideas and Experiments. In Proceedings of the Engineering Multi-Agent Systems: 11th International Workshop, EMAS 2023, London, UK, 29–30 May 2023; Revised Selected Papers. Springer Science and Business Media Deutschland GmbH: Berlin, Germany, 2023; Volume 14378 LNAI, pp. 208–219. [Google Scholar] [CrossRef]
- Palanca, J.; Rincon, J.; Julián, V.; Carrascosa, C.; Terrasa, A. IoT Artifacts: Incorporating Artifacts into the SPADE Platform. In Proceedings of the International Symposium on Ambient Intelligence, Salamanca, Spain, 6–8 October 2021; pp. 69–79. [Google Scholar]
- Brandão, F.C.; Lima, M.A.T.; Pantoja, C.E.; Zahn, J.; Viterbo, J. Engineering approaches for programming agent-based iot objects using the resource management architecture. Sensors 2021, 21, 8110. [Google Scholar] [CrossRef]
- Ricci, A.; Viroli, M.; Omicini, A. CArtAgO: A Framework for Prototyping Artifact-Based Environments in MAS; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4389 LNAI, pp. 67–86. [Google Scholar] [CrossRef]
- Freitas, A.; Panisson, A.R.; Hilgert, L.; Meneguzzi, F.; Vieira, R.; Bordini, R.H. Integrating ontologies with multi-agent systems through CArtAgO artifacts. In Proceedings of the 2015 IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology (WI-IAT), Singapore, 6–9 December 2015; Volume 2, pp. 143–150. [Google Scholar] [CrossRef]
- Croatti, A.; Ricci, A. Mobile Apps as Personal Assistant Agents: The JaCa-Android Framework for programming Agents-based applications on mobile devices. Auton. Agents Multi-Agent Syst. 2020, 34, 48. [Google Scholar] [CrossRef]
- Engelmann, D.; Ferrando, A.; Panisson, A.; Ancona, D.; Bordini, R.; Mascardi, V. RV4JaCa—Runtime Verification for Multi-Agent Systems. In Proceedings of the Second Workshop on Agents and Robots for reliable Engineered Autonomy, AREA@IJCAI-ECAI 2022, Vienna, Austria, 24 July 2022; Volume 362, pp. 23–36. [Google Scholar] [CrossRef]
- Luck, M.; Aylett, R. Guest editorial: Intelligent virtual environments. Appl. Artif. Intell. 2000, 14, 1–2. [Google Scholar] [CrossRef]
- Gutiérrez Cejudo, J.; Enguix Andrés, F.; Lujak, M.; Carrascosa Casamayor, C.; Fernandez, A.; Hernández López, L. Towards Agrirobot Digital Twins: Agri-RO5 –A Multi-Agent Architecture for Dynamic Fleet Simulation. Electronics 2024, 13, 80. [Google Scholar] [CrossRef]
- Carrascosa, C.; Enguix, F.; Rebollo, M.; Rincon, J. Consensus-Based Learning for MAS: Definition, Implementation and Integration in IVEs. Int. J. Interact. Multimed. Artif. Intell. 2023, 8, 21–32. [Google Scholar] [CrossRef]
- Rincon, J.; Garcia, E.; Julian, V.; Carrascosa, C. The JaCalIVE framework for MAS in IVE: A case study in evolving modular robotics. Neurocomputing 2018, 275, 608–617. [Google Scholar] [CrossRef]
- Duric, B.; Rincon, J.; Carrascosa, C.; Schatten, M.; Julian, V. MAMbO5: A new ontology approach for modelling and managing intelligent virtual environments based on multi-agent systems. J. Ambient Intell. Humaniz. Comput. 2019, 10, 3629–3641. [Google Scholar] [CrossRef]
- Grieves, M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication; Grieves Ltd.: Cocoa Beach, FL, USA, 2015. [Google Scholar]
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2020, 29, 36–52. [Google Scholar] [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in manufacturing: A categorical literature review and classification. IFAC-PapersOnLine 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Hribernik, K.; Cabri, G.; Mandreoli, F.; Mentzas, G. Autonomous, context-aware, adaptive Digital Twins—State of the art and roadmap. Comput. Ind. 2021, 133, 103508. [Google Scholar] [CrossRef]
- Mihai, S.; Yaqoob, M.; Hung, D.V.; Davis, W.; Towakel, P.; Raza, M.; Karamanoglu, M.; Barn, B.; Shetve, D.; Prasad, R.V.; et al. Digital twins: A survey on enabling technologies, challenges, trends and future prospects. IEEE Commun. Surv. Tutor. 2022, 24, 2255–2291. [Google Scholar] [CrossRef]
- Testasecca, T.; Lazzaro, M.; Sirchia, A. Towards Digital Twins of buildings and smart energy networks: Current and future trends. In Proceedings of the 2023 IEEE International Workshop on Metrology for Living Environment (MetroLivEnv), Milano, Italy, 29–31 May 2023; pp. 96–101. [Google Scholar]
- Attaran, M.; Attaran, S.; Celik, B.G. Revolutionizing Agriculture Through Digital Twins. In Encyclopedia of Information Science and Technology, Sixth Edition; IGI Global: Hershey, PA, USA, 2025; pp. 1–14. [Google Scholar] [CrossRef]
- Purcell, W.; Neubauer, T. Digital Twins in Agriculture: A State-of-the-art review. Smart Agric. Technol. 2023, 3, 100094. [Google Scholar] [CrossRef]
- Shaheen, M.; Farooq, M.S.; Umer, T.; Kim, B.S. Applications of federated learning; Taxonomy, challenges, and research trends. Electronics 2022, 11, 670. [Google Scholar] [CrossRef]
- Rauniyar, A.; Hagos, D.H.; Jha, D.; Håkegård, J.E.; Bagci, U.; Rawat, D.B.; Vlassov, V. Federated learning for medical applications: A taxonomy, current trends, challenges, and future research directions. IEEE Internet Things J. 2023, 1. [Google Scholar] [CrossRef]
- Nguyen, D.C.; Ding, M.; Pathirana, P.N.; Seneviratne, A.; Li, J.; Poor, H.V. Federated learning for internet of things: A comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 1622–1658. [Google Scholar] [CrossRef]
- Wu, H.; Wang, P. Node Selection Toward Faster Convergence for Federated Learning on Non-IID Data. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3099–3111. [Google Scholar] [CrossRef]
- Gao, H.; Thai, M.T.; Wu, J. When Decentralized Optimization Meets Federated Learning. IEEE Netw. 2023, 1–7. [Google Scholar] [CrossRef]
- Panigrahi, M.; Bharti, S.; Sharma, A. FedDCS: A distributed client selection framework for cross device federated learning. Future Gener. Comput. Syst. 2023, 144, 24–36. [Google Scholar] [CrossRef]
- Georgatos, E.; Mavrokefalidis, C.; Berberidis, K. Fully Distributed Federated Learning with Efficient Local Cooperations. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Chhetri, B.; Gopali, S.; Olapojoye, R.; Dehbash, S.; Namin, A.S. A Survey on Blockchain-Based Federated Learning and Data Privacy. arXiv 2023, arXiv:2306.17338. [Google Scholar]
- Wang, P.; Sun, W.; Zhang, H.; Ma, W.; Zhang, Y. Distributed and Secure Federated Learning for Wireless Computing Power Networks. IEEE Trans. Veh. Technol. 2023, 72, 9381–9393. [Google Scholar] [CrossRef]
- Zhao, T.; Du, J.; Shao, Y.; Guan, Z. Reinforcement Federated Learning Method Based on Adaptive OPTICS Clustering. arXiv 2023, arXiv:2306.12859. [Google Scholar]
- Zeng, D.; Hu, X.; Liu, S.; Yu, Y.; Wang, Q.; Xu, Z. Stochastic Clustered Federated Learning. arXiv 2023, arXiv:2303.00897. [Google Scholar]
- Dai, H.; Hong, Y. Research on Model Optimization Technology of Federated Learning. In Proceedings of the 2023 IEEE 8th International Conference on Big Data Analytics (ICBDA), Harbin, China, 3–5 March 2023; pp. 107–112. [Google Scholar] [CrossRef]
- Kairouz, P.; McMahan, H.; Avent, B.; Bellet, A.; Bennis, M.; Bhagoji, A.; Bonawitz, K.; Charles, Z.; Cormode, G.; Cummings, R.; et al. Advances and Open Problems in Federated Learning; Now Foundations and Trends: 2021; Now Publishers: Boston, MA, USA, 2021; Volume 14, pp. 1–210. [Google Scholar]
- Baresi, L.; Quattrocchi, G.; Rasi, N. Open Challenges in Federated Machine Learning. IEEE Internet Comput. 2023, 27, 20–27. [Google Scholar] [CrossRef]
- Xu, M.; Peng, J.; Gupta, B.B.; Kang, J.; Xiong, Z.; Li, Z.; El-Latif, A.A. Multiagent Federated Reinforcement Learning for Secure Incentive Mechanism in Intelligent Cyber-Physical Systems. IEEE Internet Things J. 2022, 9, 22095–22108. [Google Scholar] [CrossRef]
- Lim, W.Y.B.; Luong, N.C.; Hoang, D.T.; Jiao, Y.; Liang, Y.C.; Yang, Q.; Niyato, D.; Miao, C. Federated Learning in Mobile Edge Networks: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2031–2063. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Li, Y.; Tan, C. A survey of the consensus for multi-agent systems. Syst. Sci. Control Eng. 2019, 7, 468–482. [Google Scholar] [CrossRef]
- Aslam, M.; Ahmed, Z.; Du, L.; Hassan, M.; Ali, S.; Nasir, M. An Overview of Recent Advances of Resilient Consensus for Multiagent Systems under Attacks. Comput. Intell. Neurosci. 2022, 2022, 6732343. [Google Scholar] [CrossRef]
- Tedeschini, B.C.; Savazzi, S.; Stoklasa, R.; Barbieri, L.; Stathopoulos, I.; Nicoli, M.; Serio, L. Decentralized Federated Learning for Healthcare Networks: A Case Study on Tumor Segmentation. IEEE Access 2022, 10, 8693–8708. [Google Scholar] [CrossRef]
- Hunkeler, U.; Truong, H.L.; Stanford-Clark, A. MQTT-S—A publish/subscribe protocol for Wireless Sensor Networks. In Proceedings of the 2008 3rd International Conference on Communication Systems Software and Middleware and Workshops (COMSWARE’08), Bangalore, India, 6–10 January 2008; pp. 791–798. [Google Scholar]
- Saint-Andre, P. Extensible Messaging and Presence Protocol (XMPP): Core; Technical Report; RFC Editor, Internet Engineering Task Force: Fremont, CA, USA, 2011. [Google Scholar]
- García-Martín, J.P.; Torralba, A. Energy Consumption Analytical Modeling of NB-IoT Devices for Diverse IoT Applications. Comput. Netw. 2023, 232, 109855. [Google Scholar] [CrossRef]
- Singh, R.K.; Puluckul, P.P.; Berkvens, R.; Weyn, M. Energy consumption analysis of LPWAN technologies and lifetime estimation for IoT application. Sensors 2020, 20, 4794. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rebollo, M.; Rincon, J.A.; Hernández, L.; Enguix, F.; Carrascosa, C. Extending the Framework for Developing Intelligent Virtual Environments (FIVE) with Artifacts for Modeling Internet of Things Devices and a New Decentralized Federated Learning Based on Consensus for Dynamic Networks. Sensors 2024, 24, 1342. https://doi.org/10.3390/s24041342
Rebollo M, Rincon JA, Hernández L, Enguix F, Carrascosa C. Extending the Framework for Developing Intelligent Virtual Environments (FIVE) with Artifacts for Modeling Internet of Things Devices and a New Decentralized Federated Learning Based on Consensus for Dynamic Networks. Sensors. 2024; 24(4):1342. https://doi.org/10.3390/s24041342
Chicago/Turabian StyleRebollo, Miguel, Jaime Andrés Rincon, Luís Hernández, Francisco Enguix, and Carlos Carrascosa. 2024. "Extending the Framework for Developing Intelligent Virtual Environments (FIVE) with Artifacts for Modeling Internet of Things Devices and a New Decentralized Federated Learning Based on Consensus for Dynamic Networks" Sensors 24, no. 4: 1342. https://doi.org/10.3390/s24041342