
The Impact of Feature Extraction on Classification Accuracy Examined by Employing a Signal Transformer to Classify Hand Gestures Using Surface Electromyography Signals


Abstract
:1. Introduction
2. Literature Review
2.1. Signal Acquisition
2.2. Preprocessing
2.2.1. Filtering
2.2.2. Rectification
2.2.3. Normalization
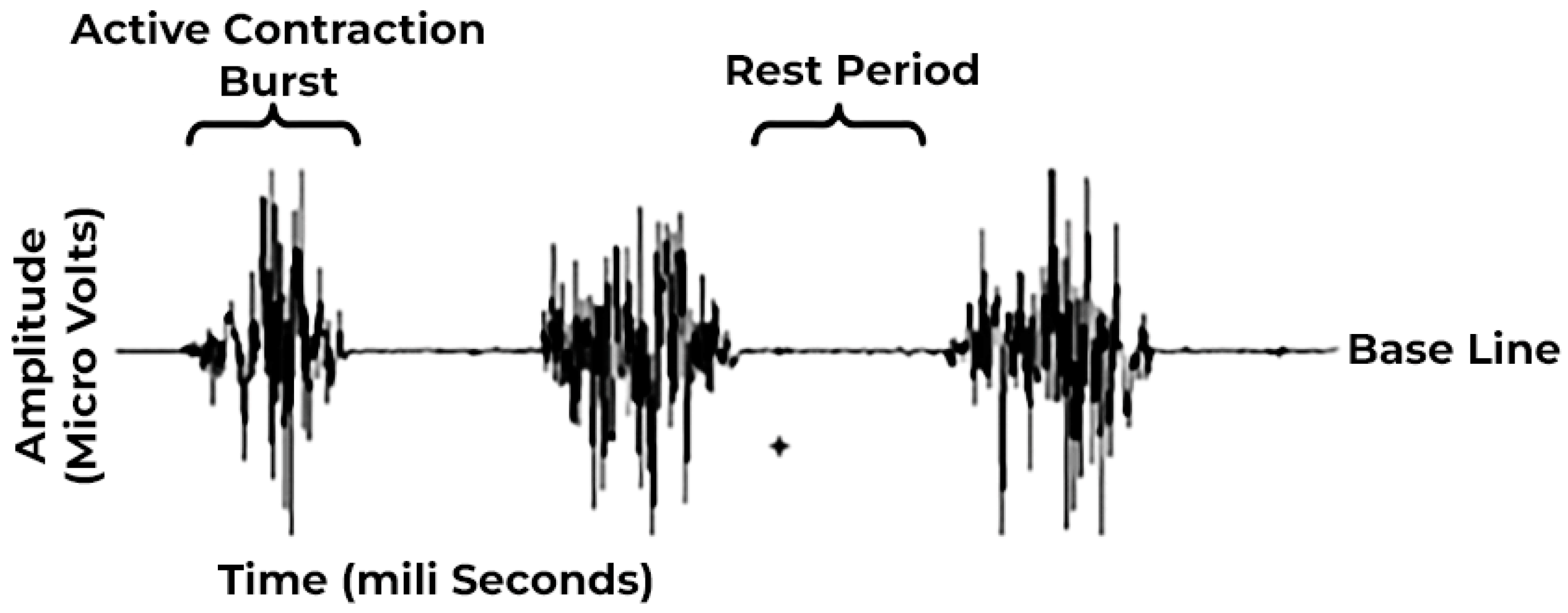
2.2.4. Segmentation
2.3. Feature Extraction
2.3.1. Time Domain Features
2.3.2. Frequency Domain Features
2.3.3. Time–Frequency Domain Features (TFD)
2.4. Classification and Evaluation
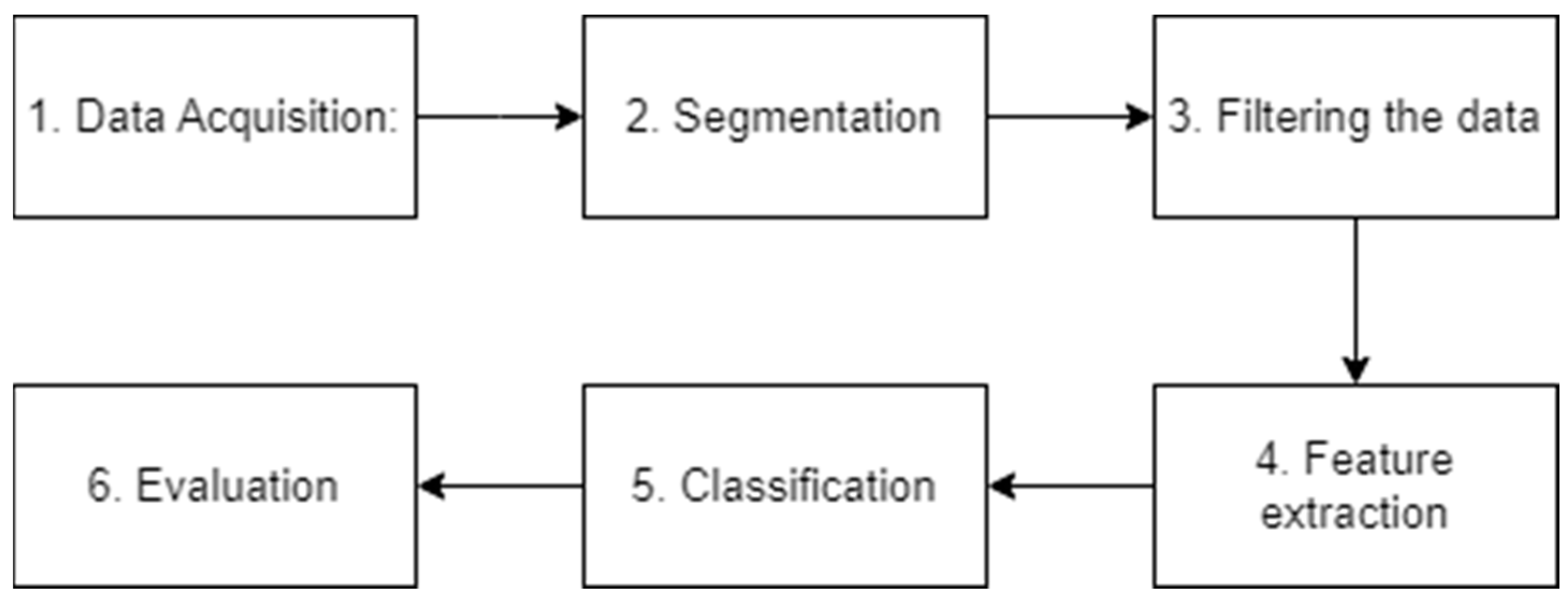
3. Methods
3.1. Data Acquisition
3.2. Segmentation
3.3. Filtering the Data
3.4. Feature Extraction
3.4.1. Fast Fourier Transformation [51]
- F(K) is the discrete signal;
- N is the size of the domain.
3.4.2. Wavelet Transformation [20]
- a is the scaling parameter, and a and b are the time-shift parameter;
- is the mother wavelet function;
- represents the wavelet coefficients.
- t is the time sequence.
3.5. Classification using ST
- X(t) is the input 1D vector to the classifier at time t;
- X1, X2 …… X10 are the output readings of each electrode at time t after the feature extraction step.
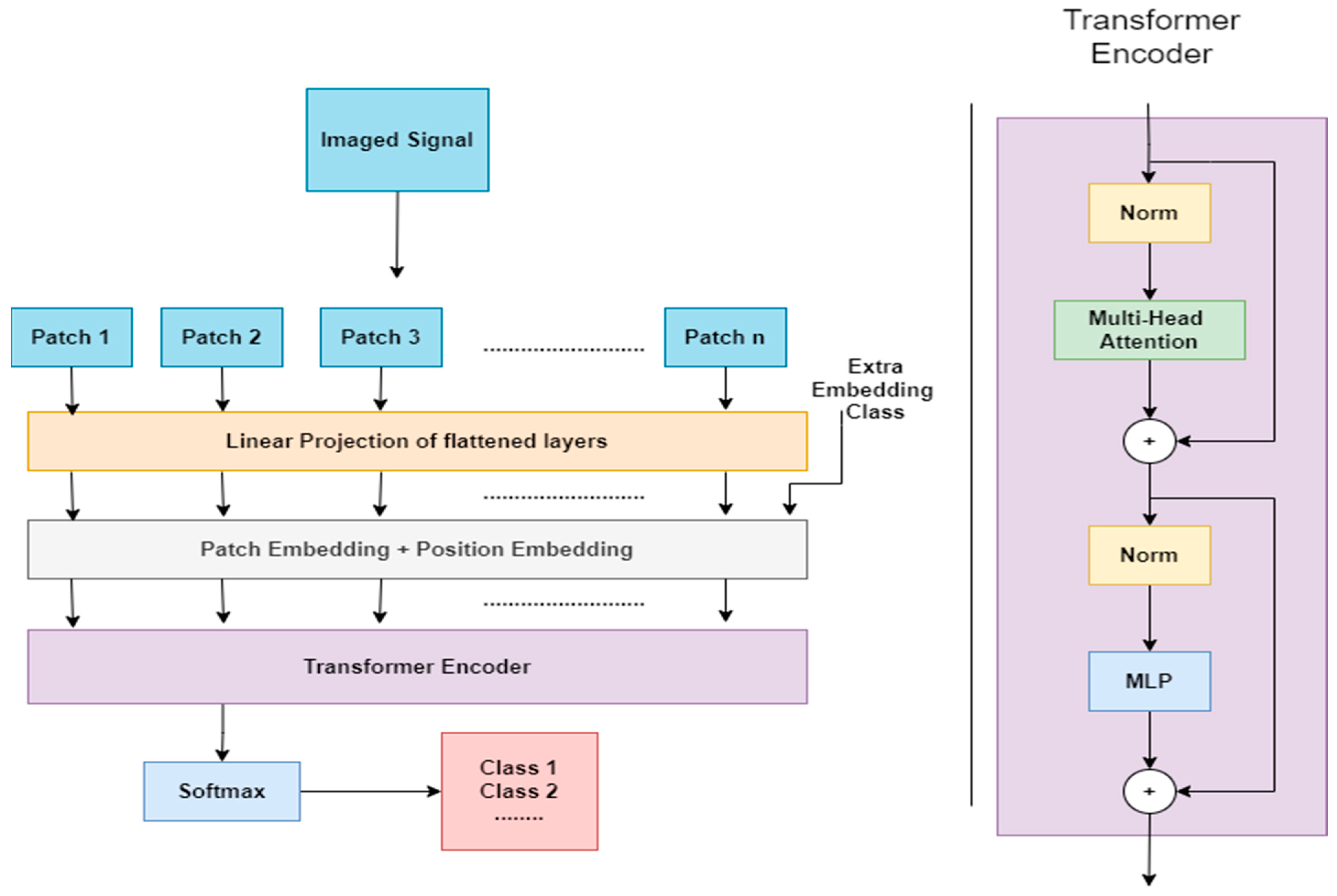
3.5.1. ST Architecture Overview
- Split the matrix signals into patches;
- Patch embeddings;
- Position embeddings;
- Transformer encoder;
- Multilayer perceptron head.
Split the Matrix Signals into Patches
- (H, W) is the resolution of the original image (height and width);
- C is the number of channels of the matrix (1 in our case);
- (P, P) is the resolution of the image patch.
Patch Embeddings
Position Embeddings
- signifies the input sequence of embeddings for the Transformer encoder;
- is the prepended learnable class token;
- is the sequence of embedded patched;
- is the embedding matrix;
- is the position embedding.
Transformer Encoder
- is the patch sequence representation output at layer l of the network;
- (LN) is the layer norm representation applied.
Multilayer Perceptron Head (Classification Head)
- y is the predicted class;
- is the first token of the Transformer’s final layer output.
3.6. Parameters Selection
3.7. Evaluation
4. Results and Discussion
4.1. Training on NinaPro DB1
4.2. Training on CapgMyo DB A
4.3. Training on CapgMyo DB B
4.4. Compared to Previous Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| Feature | Formula | Explanation |
|---|---|---|
| Mean Absolute Value (MAV) [65] | MAV (xi) = | The moving average of the signal. |
| Waveform length (WL) [66] | Offers a simple characterization of the amplitude, duration, and frequency of the signal. | |
| Zero Crossing (ZC) [36] | is used to avoid noise). | |
| Variance (VAR) [24] | An index to the power of the signal. | |
| Root Mean Square (RMS) | Also known as the quadratic mean. Related to the standard deviation when the mean of the signal = 0. | |
| Average Amplitude Change (AAC) [36] | Shows the mean value by which the amplitude of the signal changes | |
| Slope sign change (SSC) [36] | Measures the frequency at which the signal changes the slope sign (derivative). | |
| Skewness (SKEW) [36] | is the standard deviation | Measures the asymmetry of the distribution. |
| Autoregressive coefficient (AR) [36] | is the residual noise | Aims to predict the future values of the signal based on the weighted average of the previous data. It shows each sample point as a linear combination of previous samples and an error. |
| Integrated EMG (IEMG) | Returns the absolute sum of the segment. | |
| Myopulse Percentage Rate (MYOP) | Shows the mean absolute value of the segment of the windows that is larger than an amplitude threshold value. | |
| Temporal Moment (TM) | The 1st order is the MAV, and the 2nd order is the variance; thus, it usually starts from the 3rd order. It is a statistical analysis technique that can also be used as a feature. | |
| V-order (VO) [67] | According to [6] it gives an insight into the force of muscle contraction. | |
| Mean Absolute Derivative (MAD) | Shows the distance between each sample of the window and the mean. |
| Feature | Formula | Explanation |
|---|---|---|
| Mean frequency (MNF) | The average frequency. | |
| Median frequency (MDF) | The frequency divides the spectrum into two regions that are equal in amplitude. | |
| Mean power frequency (MNP) | The average power of the power spectrum. | |
| Peak frequency (PF) | ) | The frequency corresponds to the highest power. |
| Total power (TTP) | A summation of the sEMG power spectrum. | |
| Frequency ratio (FR) | where ULC and LLC are the upper- and lower-cutoff frequency of the low-frequency band, and UHC and LHC are the upper- and lower-cutoff frequency of the high-frequency band, respectively. | The ratio between the highest and lowest frequency components of the sEMG signals used to distinguish between the contraction and relaxation of the muscles. |
| Power spectrum ratio (PSR) | is a feature value of the FPK, and n is the limit for integration | The ratio between the energy (nearly the maximum value of the sEMG power spectrum) and the energy P, which is the whole energy of the sEMG power spectrum. |
| Feature | Formula | Explanation |
|---|---|---|
| Continuous Wavelet transform (CWT) | where a is a scale parameter and b is a translation parameter | Uses every possible wavelet in a range of locations and scales through the changing parameters and b. |
| Discrete Wavelet Transformation (DWT) | and where m is the dilation parameter, n is the translation parameter, and is the step parameter | Uses defined wavelets in a range of locations and scales. |
References
- Ho, N.S.K.; Tong, K.Y.; Hu, X.L.; Fung, K.L.; Wei, X.J.; Rong, W.; Susanto, E.A. An EMG-Driven Exoskeleton Hand Robotic Training Device on Chronic Stroke Subjects: Task Training System for Stroke Rehabilitation. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar] [CrossRef]
- Li, Z.; Wang, B.; Sun, F.; Yang, C.; Xie, Q.; Zhang, W. SEMG-Based Joint Force Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE J. Biomed. Health Inform. 2014, 18, 1043–1050. [Google Scholar] [CrossRef]
- Xing, S.; Zhang, X. EMG-Driven Computer Game for Post-Stroke Rehabilitation. In Proceedings of the 2010 IEEE Conference on Robotics, Automation and Mechatronics, RAM 2010, Singapore, 28–30 June 2010; pp. 32–36. [Google Scholar] [CrossRef]
- Kiguchi, K.; Hayashi, Y. An EMG-Based Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE Trans. Syst. Man Cybern. B Cybern. 2012, 42, 1064–1071. [Google Scholar] [CrossRef] [PubMed]
- Singh, R.M.; Chatterji, S.; Kumar, A. A Review on Surface EMG Based Control Schemes of Exoskeleton Robot in Stroke Rehabilitation. In Proceedings of the 2013 International Conference on Machine Intelligence Research and Advancement, ICMIRA 2013, Katra, India, 21–23 December 2013; pp. 310–315. [Google Scholar] [CrossRef]
- Fang, C.; He, B.; Wang, Y.; Cao, J.; Gao, S. EMG-Centered Multisensory Based Technologies for Pattern Recognition in Rehabilitation: State of the Art and Challenges. Biosensors 2020, 10, 85. [Google Scholar] [CrossRef] [PubMed]
- Zeng, Z.; Wang, F. An Attention Based Chinese Sign Language Recognition Method Using SEMG Signal. In Proceedings of the 2022 12th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems, CYBER 2022, Baishan, China, 27–31 July 2022; pp. 457–461. [Google Scholar] [CrossRef]
- Beauchamp, B.P.; Kandalaft, N. HD-SEMG for Human Interfacing Devices. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference, IEMCON 2019, Vancouver, BC, Canada, 17–19 October 2019; pp. 519–522. [Google Scholar] [CrossRef]
- Ptaszkowski, K.; Wlodarczyk, P.; Paprocka-Borowicz, M. The Relationship Between The Electromyographic Activity Of Rectus And Oblique Abdominal Muscles And Bioimpedance Body Composition Analysis—A Pilot Observational Study. Diabetes Metab. Syndr. Obes. 2019, 12, 2033–2040. [Google Scholar] [CrossRef] [PubMed]
- Arjunan, S.P.; Wheeler, K.; Shimada, H.; Kumar, D. Age Related Changes in the Complexity of Surface EMG in Biceps: A Model Based Study. In Proceedings of the ISSNIP Biosignals and Biorobotics Conference, BRC, Rio de Janeiro, Brazil, 18–20 February 2013. [Google Scholar] [CrossRef]
- Boyas, S.; Maïsetti, O.; Guével, A. Changes in SEMG Parameters among Trunk and Thigh Muscles during a Fatiguing Bilateral Isometric Multi-Joint Task in Trained and Untrained Subjects. J. Electromyogr. Kinesiol. 2009, 19, 259–268. [Google Scholar] [CrossRef] [PubMed]
- Konrad, P. The ABC of EMG. A Practical Introduction to Kinesiological Electromyography; Noraxon: Scottsdale, AZ, USA, 2005. [Google Scholar]
- Wong, Y.M.; Ng, G.Y.F. Surface Electrode Placement Affects the EMG Recordings of the Quadriceps Muscles. Phys. Ther. Sport 2006, 7, 122–127. [Google Scholar] [CrossRef]
- Reaz, M.B.I.; Hussain, M.S.; Mohd-Yasin, F. Techniques of EMG Signal Analysis: Detection, Processing, Classification and Applications. Biol. Proced. Online 2006, 8, 11–35. [Google Scholar] [CrossRef]
- Mendes Junior, J.J.A.; Freitas, M.L.B.; Siqueira, H.V.; Lazzaretti, A.E.; Stevan, S.L.; Pichorim, S.F. Comparative Analysis among Feature Selection of SEMG Signal for Hand Gesture Classification by Armband. IEEE Lat. Am. Trans. 2020, 18, 1135–1143. [Google Scholar] [CrossRef]
- Ruangpaisarn, Y.; Jaiyen, S. SEMG Signal Classification Using SMO Algorithm and Singular Value Decomposition. In Proceedings of the 2015 7th International Conference on Information Technology and Electrical Engineering: Envisioning the Trend of Computer, Information and Engineering, ICITEE 2015, Chiang Mai, Thailand, 29–30 October 2015; pp. 46–50. [Google Scholar] [CrossRef]
- Thakur, N.; Mathew, L. SEMG Signal Classification Using Ensemble Learning Classification Approach and DWT. In Proceedings of the 2018 International Conference on Current Trends towards Converging Technologies, ICCTCT 2018, Coimbatore, India, 1–3 March 2018. [Google Scholar] [CrossRef]
- Alkan, A.; Günay, M. Identification of EMG Signals Using Discriminant Analysis and SVM Classifier. Expert Syst. Appl. 2012, 39, 44–47. [Google Scholar] [CrossRef]
- Gokgoz, E.; Subasi, A. Comparison of Decision Tree Algorithms for EMG Signal Classification Using DWT. Biomed. Signal Process. Control. 2015, 18, 138–144. [Google Scholar] [CrossRef]
- Tanwar, S.; Nayyar, A.; Rameshwar, R. Machine Learning in Signal Processing: Applications, Challenges, and The Road Ahead; CRC Press: Boca Raton, FL, USA; Chapman & Hall: New York, NY, USA, 2022; ISBN 9780367618902. [Google Scholar]
- Guo, D.; Tang, S.; Wang, M. Connectionist Temporal Modeling of Video and Language: A Joint Model for Translation and Sign Labeling. In Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence (IJCAI-19), Macau, China, 10 August 2019. [Google Scholar]
- Suvinen, T.I.; Kemppainen, P. Review of Clinical EMG Studies Related to Muscle and Occlusal Factors in Healthy and TMD Subjects. J. Oral Rehabil. 2007, 34, 631–644. [Google Scholar] [CrossRef] [PubMed]
- Sadikoglu, F.; Kavalcioglu, C.; Dagman, B. Electromyogram (EMG) Signal Detection, Classification of EMG Signals and Diagnosis of Neuropathy Muscle Disease. Procedia Comput. Sci. 2017, 120, 422–429. [Google Scholar] [CrossRef]
- Li, W.; Shi, P.; Yu, H. Gesture Recognition Using Surface Electromyography and Deep Learning for Prostheses Hand: State-of-the-Art, Challenges, and Future. Front. Neurosci. 2021, 15, 621885. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Zhang, J.; Wang, L.; Zhang, M.; Li, J.; Bao, S. A Review of the Key Technologies for SEMG-Based Human-Robot Interaction Systems. Biomed. Signal Process. Control. 2020, 62, 102074. [Google Scholar] [CrossRef]
- Farrow, C.L.; Shaw, M.; Kim, H.; Juhás, P.; Billinge, S.J.L. Nyquist-Shannon Sampling Theorem Applied to Refinements of the Atomic Pair Distribution Function. Phys. Rev. B Condens. Matter Mater. Phys. 2011, 84, 134105. [Google Scholar] [CrossRef]
- Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Geng, W. Surface EMG-Based Inter-Session Gesture Recognition Enhanced by Deep Domain Adaptation. Sensors 2017, 17, 458. [Google Scholar] [CrossRef] [PubMed]
- De Luca, C.J.; Donald Gilmore, L.; Kuznetsov, M.; Roy, S.H. Filtering the Surface EMG Signal: Movement Artifact and Baseline Noise Contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef]
- Yao, B.; Salenius, S.; Yue, G.H.; Brown, R.W.; Liu, J.Z. Effects of Surface EMG Rectification on Power and Coherence Analyses: An EEG and MEG Study. J. Neurosci. Methods 2007, 159, 215–223. [Google Scholar] [CrossRef]
- Myers, L.J.; Lowery, M.; O’Malley, M.; Vaughan, C.L.; Heneghan, C.; St. Clair Gibson, A.; Harley, Y.X.R.; Sreenivasan, R. Rectification and Non-Linear Pre-Processing of EMG Signals for Cortico-Muscular Analysis. J. Neurosci. Methods 2003, 124, 157–165. [Google Scholar] [CrossRef]
- Sousa, A.S.; Tavares, J.M.R.S. Surface Electromyographic Amplitude Normalization Methods: A Review; Nova Science Publishers, Inc.: Hauppauge, NY, USA, 2012. [Google Scholar]
- Bhardwaj, S.; Khan, A.; Muzammil, M. Electromyography in Physical Rehabilitation: A Review. In Proceedings of the National Conference on Mechanical Engineering—Ideas, Innovations & Initiatives (NCMEI3-2016), Aligarh, India, 16–17 April 2016. [Google Scholar]
- Farrell, T.R.; Weir, R.F. The Optimal Controller Delay for Myoelectric Prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 111–118. [Google Scholar] [CrossRef]
- Kulwa, F.; Samuel, O.W.; Asogbon, M.G.; Obe, O.O.; Li, G. Analyzing the Impact of Varied Window Hyper-Parameters on Deep CNN for SEMG Based Motion Intent Classification. In Proceedings of the 2022 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4.0&IoT), Trento, Italy, 7–9 June 2022. [Google Scholar]
- Englehart, K.; Hudgins, B. A Robust, Real-Time Control Scheme for Multifunction Myoelectric Control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef]
- Côté-Allard, U.; Fall, C.L.; Drouin, A.; Campeau-Lecours, A.; Gosselin, C.; Glette, K.; Laviolette, F.; Gosselin, B. Deep Learning for Electromyographic Hand Gesture Signal Classification Using Transfer Learning. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 760–771. [Google Scholar] [CrossRef] [PubMed]
- Nazmi, N.; Rahman, M.A.A.; Yamamoto, S.I.; Ahmad, S.A.; Zamzuri, H.; Mazlan, S.A. A Review of Classification Techniques of EMG Signals during Isotonic and Isometric Contractions. Sensors 2016, 16, 1304. [Google Scholar] [CrossRef]
- Lehmler, S.J.; Saif-ur-Rehman, M.; Glasmachers, T.; Iossifidis, I. Deep Transfer-Learning for Patient Specific Model Re-Calibration: Application to SEMG-Classification. arXiv 2021, arXiv:2112.15019v1. [Google Scholar]
- Said, S.; Albarakeh, Z.; Beyrouthy, T.; Alkork, S.; Nait-Ali, A. Machine-Learning Based Wearable Multi-Channel SEMG Biometrics Modality for User’s Identification. In Proceedings of the 4th International Conference on Bio-Engineering for Smart Technologies (BioSMART 2021), Paris, France, 8–10 December 2021. [Google Scholar] [CrossRef]
- Li, Q.; Langari, R. Myoelectric Human Computer Interaction Using CNN-LSTM Neural Network for Dynamic Hand Gestures Recognition. In Proceedings of the 2021 IEEE International Conference on Big Data, Big Data 2021, Orlando, FL, USA, 15–18 December 2021; pp. 5947–5949. [Google Scholar] [CrossRef]
- Addison, P.S. Wavelet Transforms and the ECG: A Review. Physiol. Meas. 2005, 26, R155–R199. [Google Scholar] [CrossRef] [PubMed]
- Tsinganos, P.; Cornelis, B.; Cornelis, J.; Jansen, B.; Skodras, A. Improved Gesture Recognition Based on SEMG Signals and TCN. In Proceedings of the ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing—Proceedings 2019, Brighton, UK, 12–17 May 2019; pp. 1169–1173. [Google Scholar] [CrossRef]
- Tsagkas, N.; Tsinganos, P.; Skodras, A. On the Use of Deeper CNNs in Hand Gesture Recognition Based on SEMG Signals. In Proceedings of the 10th International Conference on Information, Intelligence, Systems and Applications, IISA 2019, Patras, Greece, 15–17 July 2019. [Google Scholar] [CrossRef]
- Shen, S.; Wang, X.; Mao, F.; Sun, L.; Gu, M. Movements Classification through SEMG With Convolutional Vision Transformer and Stacking Ensemble Learning. IEEE Sens. J. 2022, 22, 13318–13325. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Hu, R.; Zhang, X.; Chen, X. Hand Gesture Recognition Based on Surface Electromyography Using Convolutional Neural Network with Transfer Learning Method. IEEE J. Biomed. Health Inform. 2021, 25, 1292–1304. [Google Scholar] [CrossRef] [PubMed]
- Burrello, A.; Scherer, M.; Zanghieri, M.; Conti, F.; Benini, L. A Microcontroller Is All You Need: Enabling Transformer Execution on Low-Power IoT Endnodes. In Proceedings of the 2021 IEEE International Conference on Omni-Layer Intelligent Systems, COINS 2021, Barcelona, Spain, 23–25 August 2021. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Heynen, S.; Hager, A.G.M.; Deriaz, O.; Van Der Smagt, P.; Castellini, C.; Caputo, B.; Muller, H. Building the Ninapro Database: A Resource for the Biorobotics Community. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 24–27 June 2012; pp. 1258–1265. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.G.M.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Müller, H. Electromyography Data for Non-Invasive Naturally-Controlled Robotic Hand Prostheses. Sci. Data 2014, 1, 140053. [Google Scholar] [CrossRef] [PubMed]
- ZJU CAPG GROUP. Available online: http://zju-capg.org/research_en_electro_capgmyo.html (accessed on 27 October 2023).
- Wei, W.; Wong, Y.; Du, Y.; Hu, Y.; Kankanhalli, M.; Geng, W. A Multi-Stream Convolutional Neural Network for SEMG-Based Gesture Recognition in Muscle-Computer Interface. Pattern Recognit. Lett. 2019, 119, 131–138. [Google Scholar] [CrossRef]
- Tsinganos, P.; Cornelis, B.; Cornelis, J.; Jansen, B.; Skodras, A. Deep Learning in EMG-Based Gesture Recognition. In Proceedings of the 5th International Conference on Physiological Computing Systems (PhyCS 2018), Seville, Spain, 27 September 2018; pp. 107–114. [Google Scholar] [CrossRef]
- Atzori, M.; Cognolato, M.; Müller, H. Deep Learning with Convolutional Neural Networks Applied to Electromyography Data: A Resource for the Classification of Movements for Prosthetic Hands. Front. Neurorobot. 2016, 10, 9. [Google Scholar] [CrossRef]
- Camata, T.V.; Dantas, J.L.; Abrão, T.; Brunetto, M.A.O.C.; Moraes, A.C.; Altimari, L.R. Fourier and Wavelet Spectral Analysis of EMG Signals in Supramaximal Constant Load Dynamic Exercise. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBC’10, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 1364–1367. [Google Scholar] [CrossRef]
- Romanato, M.; Strazza, A.; Piatkowska, W.J.; Spolaor, F.; Fioretti, S.; Volpe, D.; Sawacha, Z.; Di Nardo, F. Characterization of EMG Time-Frequency Content during Parkinson Walking: A Pilot Study. In Proceedings of the 2021 IEEE International Symposium on Medical Measurements and Applications, MeMeA 2021—Conference Proceedings, Lausanne, Switzerland, 23–25 June 2021. [Google Scholar] [CrossRef]
- Buelvas, H.E.P.; Montaña, J.D.T.; Serrezuela, R.R. Hand Gesture Classification Using Deep Learning and CWT Images Based on Multi-Channel Surface EMG Signals. In Proceedings of the International Conference on Electrical, Computer, Communications and Mechatronics Engineering, ICECCME 2023, Tenerife, Spain, 19–21 July 2023. [Google Scholar] [CrossRef]
- Geng, W.; Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Li, J. Gesture Recognition by Instantaneous Surface EMG Images. Sci. Rep. 2016, 6, 36571. [Google Scholar] [CrossRef]
- Tsinganos, P.; Cornelis, B.; Cornelis, J.; Jansen, B.; Skodras, A. Hilbert SEMG Data Scanning for Hand Gesture Recognition Based on Deep Learning. Neural Comput. Appl. 2021, 33, 2645–2666. [Google Scholar] [CrossRef]
- Wang, K.; Chen, Y.; Zhang, Y.; Yang, X.; Hu, C. Iterative Self-Training Based Domain Adaptation for Cross-User SEMG Gesture Recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2974–2987. [Google Scholar] [CrossRef]
- Padhy, S. A Tensor-Based Approach Using Multilinear SVD for Hand Gesture Recognition from SEMG Signals. IEEE Sens. J. 2021, 21, 6634–6642. [Google Scholar] [CrossRef]
- Fan, J.; Wen, J.; Lai, Z. Myoelectric Pattern Recognition Using Gramian Angular Field and Convolutional Neural Networks for Muscle–Computer Interface. Sensors 2023, 23, 2715. [Google Scholar] [CrossRef]
- Wang, S.; Huang, L.; Jiang, D.; Sun, Y.; Jiang, G.; Li, J.; Zou, C.; Fan, H.; Xie, Y.; Xiong, H.; et al. Improved Multi-Stream Convolutional Block Attention Module for SEMG-Based Gesture Recognition. Front. Bioeng. Biotechnol. 2022, 10, 909023. [Google Scholar] [CrossRef]
- Dai, Q.; Wong, Y.; Kankanhali, M.; Li, X.; Geng, W. Improved Network and Training Scheme for Cross-Trial Surface Electromyography (SEMG)-Based Gesture Recognition. Bioengineering 2023, 10, 1101. [Google Scholar] [CrossRef]
- Chahid, A.; Khushaba, R.; Al-Jumaily, A.; Laleg-Kirati, T.M. A Position Weight Matrix Feature Extraction Algorithm Improves Hand Gesture Recognition. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS 2020, Montreal, QC, Canada, 20–24 July 2020; pp. 5765–5768. [Google Scholar] [CrossRef]
- Mian, X.; Bingtao, Z.; Shiqiang, C.; Song, L. MCMP-Net: MLP Combining Max Pooling Network for SEMG Gesture Recognition. Biomed. Signal Process. Control. 2024, 90, 105846. [Google Scholar] [CrossRef]
- Abbaspour, S.; Lindén, M.; Gholamhosseini, H.; Naber, A.; Ortiz-Catalan, M. Evaluation of Surface EMG-Based Recognition Algorithms for Decoding Hand Movements. Med. Biol. Eng. Comput. 2020, 58, 83–100. [Google Scholar] [CrossRef]
- Qin, P.; Shi, X. Evaluation of Feature Extraction and Classification for Lower Limb Motion Based on SEMG Signal. Entropy 2020, 22, 852. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature Reduction and Selection for EMG Signal Classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]



| Title | Dataset | Subject/ Sessions (Total) | Classes/Channels | Time Window | Feature | Classifier | Accuracy (%) |
|---|---|---|---|---|---|---|---|
| [36] | NinaPro Database (DB) 5 | 10/6 | 18/8 | 260 ms | CWT | Transfer learning (TL) + CNN | 68.98 |
| [40] | Private | 7/10 | 5/8 | Not mentioned | Raw | CNN-LSTM | 92.7 |
| [42] | NinaPro DB1 | 27/10 | 52/10 | 2500 ms | Root Mean Square (RMS) | TCN | 89.76/NA |
| [43] | NinaPro DB1-DB5-private | 27/10-8/5-8/5 | 52/10-12/8-12/8 | 150ms-na-na | Non | CNN | 71.85-55.31-78.98 |
| [38] | DB 2, 3 and 4 | 40-11-10/6 | 17/12-17/12-12/12 | 200 ms | 18 feature-Raw | TL + MLP-TL + CNN | 67.00-68.00 |
| [27] | DB1 | 27/10 | 52/8 × 16 | 40 frames centred | Raw + AdaBN | TL + ensemble CNN | 56.50-67.40-Na |
| [44] | DB2 | 40/6 | 49/12 | 200 ms | Time + Frequency | CViT | 80.02 |
| [45] | CapgMyo Db A | 18/8 | 8/128 | 100 ms | CNN | CNN + LSTM + TL | 94.57 |
| Models | Accuracy for Learning Rate of 0.001 | Accuracy for Learning Rate of 0.0001 | Accuracy for Learning Rate of 0.00001 |
|---|---|---|---|
| NinaPro DB1-subject 1 | 88.13 | 89.85 | 85.54 |
| NinaPro DB1-subject 7 | 87.19 | 88.52 | 84.61 |
| NinaPro DB1-subject 22 | 88.15 | 89.85 | 86.71 |
| CapgMyo-A-subject 1 | 92.56 | 94.56 | 94.61 |
| CapgMyo-A-subject 7 | 78.9 | 78.39 | 78.22 |
| CapgMyo-B-subject 1 | 88.21 | 89.1 | 88.8 |
| Average: | 76.69 | 77.87 | 75.91 |
| Models | Accuracy for 4 Transformer Heads | Accuracy for 8 Transformer Heads | Accuracy for 16 Transformer Heads |
|---|---|---|---|
| Nina-subject 1 | 90.34 | 89.68 | 90.13 |
| Nina-subject 7 | 87.56 | 87.6 | 87.8 |
| Nina-subject 22 | 91.99 | 92.43 | 91.77 |
| CapgMyo-A-subject 1 | 94.22 | 94.61 | 92.83 |
| CapgMyo-A-subject 7 | 77.83 | 78.22 | 80.06 |
| CapgMyo-B-subject 1 | 88.8 | 89.1 | 87.4 |
| Average: | 78.29 | 78.44 | 76.49 |
| Models | Accuracy for Morl Scale 1–10 | Accuracy for Morl Scale 1–20 | Accuracy for Morl Scale 1–100 |
|---|---|---|---|
| Nina-subject 1 | 89.09 | 89.22 | 89.18 |
| Nina-subject 7 | 88.31 | 88.42 | 87.41 |
| Nina-subject 22 | 91.99 | 92.39 | 91.95 |
| CapgMyo- A-subject 1 | 94.17 | 94.11 | 94.28 |
| CapgMyo- A-subject 7 | 78 | 78.67 | 78.94 |
| CapgMyo- B-subject 1 | 88.28 | 88.11 | 87.94 |
| Average | 78.3 | 78.48 | 78.28 |
| Models | Accuracy for Mexh Scale 10 | Accuracy for Mexh Scale 20 | Accuracy for Mexh Scale 100 |
|---|---|---|---|
| Nina-subject 1 | 89.38 | 88.64 | 88.64 |
| Nina-subject 7 | 88.46 | 87.6 | 87.84 |
| Nina-subject 22 | 91.84 | 92.02 | 91.99 |
| CapgMyo-A-subject 1 | 73.17 | 74.83 | 75.33 |
| CapgMyo-A-subject 7 | 81.00 | 77.72 | 79.00 |
| CapgMyo-B-subject 1 | 89.78 | 80.11 | 89.56 |
| Average | 78.93 | 78.48 | 78.72 |
| Batch Size | Matrix Signal Size | Num of Epochs | Eval Steps | Learning Rate | Weight Decay | Transformer Layers | Input Patch Size | MLP Head Size |
|---|---|---|---|---|---|---|---|---|
| 55 | 72 × 72 | 8 | 100 | 0.0001 | 0.0001 | 8 | 6 | 2048 × 1024 |
| Model Number | Data Set | Feature Extracted | Model Name |
|---|---|---|---|
| 1 | Ninapro DB1 | Raw Data | ST-Nina-RAW |
| 2 | Ninapro DB1 | Fast Fourier Transform | ST-Nina-FFT |
| 3 | Ninapro DB1 | CWT—Mexican hat | ST-Nina-MEXH |
| 4 | CapgMyo DB A | Raw Data | ST-Capg-A-RAW |
| 5 | CapgMyo DB A | Fast Fourier Transform | ST-Capg-A-FFT |
| 6 | CapgMyo DB A | CWT—Mexican hat | ST-Capg-A-MEXH |
| 7 | CapgMyo DB B | Raw Data | ST-Capg-B-RAW |
| 8 | CapgMyo DB B | Fast Fourier Transform | ST-Capg-B-FFT |
| 9 | CapgMyo DB B | CWT—Mexican hat | ST-Capg-B-MEXH |
| Model Name | Accuracy (%) | F1 Macro Score (%) | F1 Micro Score (%) |
|---|---|---|---|
| ST-Nina-RAW | 85.97 | 14.25 | 57.90 |
| ST-Nina-FFT | 85.30 | 13.27 | 61.74 |
| ST-Nina-MEXH | 85.92 | 14.14 | 58.88 |
| Model Name | Accuracy (%) | F1 Macro Score (%) | F1 Micro Score (%) |
|---|---|---|---|
| ST-Capg-A-RAW | 77.79 | 30.70 | 70.60 |
| ST-Capg-A-FFT | 79.90 | 31.30 | 70.00 |
| ST-Capg-A-MEXH | 77.90 | 29.47 | 67.27 |
| Model Name | Accuracy (%) | F1 Macro Score (%) | F1 Micro Score (%) |
|---|---|---|---|
| ST-Capg-B-RAW | 71.36 | 25.59 | 58.6 |
| ST-Capg-B-FFT | 72.92 | 27.00 | 61.96 |
| ST-Capg-B-MEXH | 71.57 | 25.94 | 58.36 |
| Reference | Database | Algorithm | Accuracy | Evaluation Method |
|---|---|---|---|---|
| [58] | Ninapro DB1 | Self-Learning | 40.24 | Inter-subject |
| [59] | Ninapro DB1 | SVM | 75.2% | Inter-subject |
| [57] | Ninapro DB1 | CNN | 78.75% | Inter-subject |
| [52] | Ninapro DB1 | Random Forest | 75.32% | Inter-subject |
| [52] | Ninapro DB1 | CNN | 66.60% | Inter-subject |
| [56] | Ninapro DB1 | CNN | 78.90% | Inter-subject |
| [51] | Ninapro DB1 | CNN | 70.48% | Inter-subject |
| [50] | Ninapro DB1 | CNN | 85.00% | Inter-subject |
| [60] | Ninapro DB1 | CNN | 85.50% | Inter-subject |
| [61] | Ninapro DB1 | CNN + Attention | 86.00% | Inter-Session |
| [62] | Ninapro DB1 | CNN | 91.40% | Inter-Session |
| [58] | CapgMyo A | Self-Learning | 76.31% | Inter-subject |
| [63] | CapgMyo A | Linear Regression | 77.57% | Inter-subject |
| [63] | CapgMyo A | Position weight | 75.00% | Inter-subject |
| [64] | CapgMyo A | MLP | 90.50% | Inter-Session |
| [58] | CapgMyo B | Self-Learning | 79.86% | Inter-subject |
| [59] | CapgMyo B | SVM | 75.40% | Inter-subject |
| [64] | CapgMyo B | MLP | 90.30% | Inter-Session |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moslhi, A.M.; Aly, H.H.; ElMessiery, M. The Impact of Feature Extraction on Classification Accuracy Examined by Employing a Signal Transformer to Classify Hand Gestures Using Surface Electromyography Signals. Sensors 2024, 24, 1259. https://doi.org/10.3390/s24041259
Moslhi AM, Aly HH, ElMessiery M. The Impact of Feature Extraction on Classification Accuracy Examined by Employing a Signal Transformer to Classify Hand Gestures Using Surface Electromyography Signals. Sensors. 2024; 24(4):1259. https://doi.org/10.3390/s24041259
Chicago/Turabian StyleMoslhi, Aly Medhat, Hesham H. Aly, and Medhat ElMessiery. 2024. "The Impact of Feature Extraction on Classification Accuracy Examined by Employing a Signal Transformer to Classify Hand Gestures Using Surface Electromyography Signals" Sensors 24, no. 4: 1259. https://doi.org/10.3390/s24041259