
Multi-Dimensional Wi-Fi Received Signal Strength Indicator Data Augmentation Based on Multi-Output Gaussian Process for Large-Scale Indoor Localization †


Abstract
:1. Introduction
2. Related Work
2.1. Data Augmentation
2.2. Indoor Localization Data Augmentation
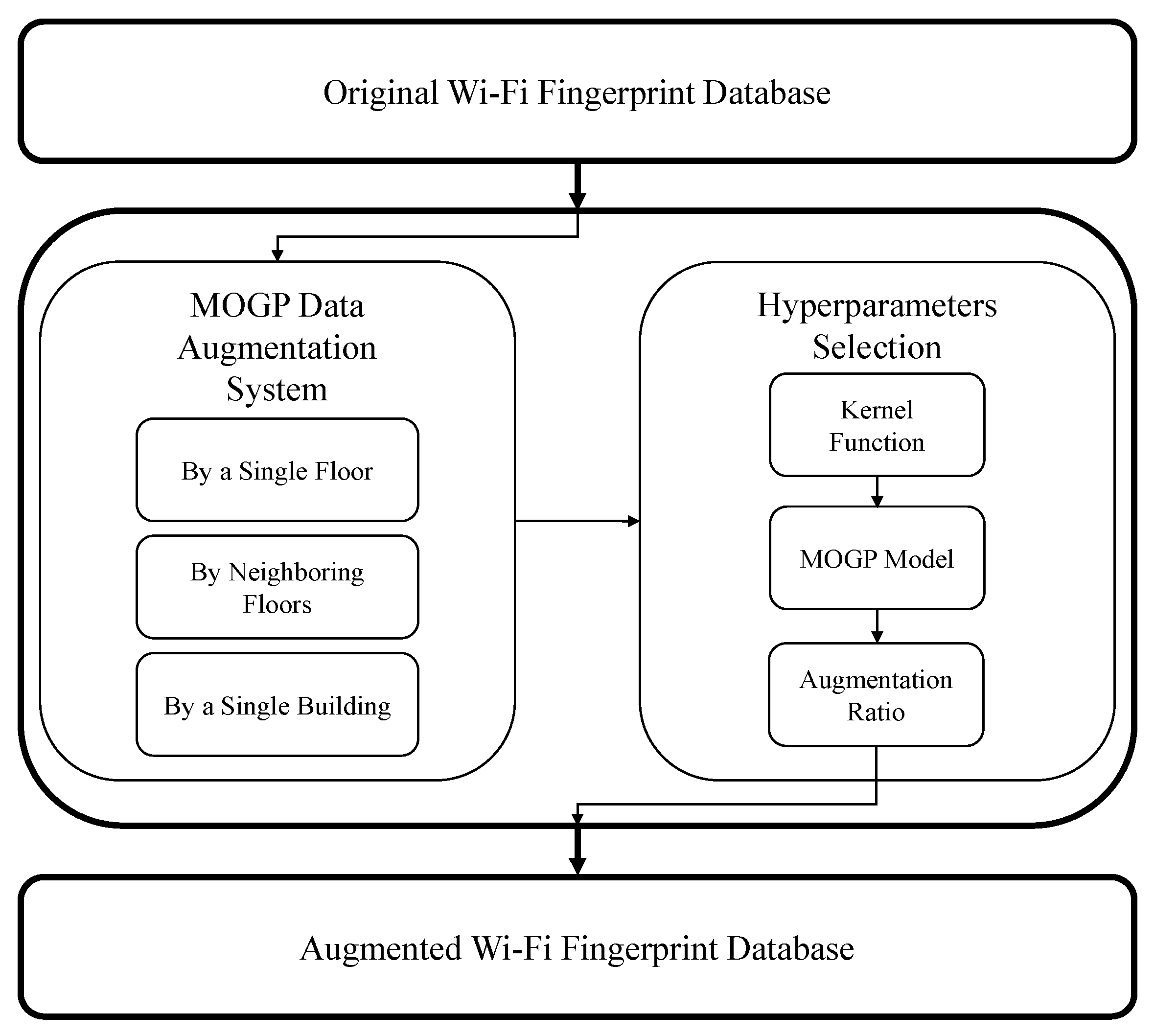
3. Multi-Dimensional Fingerprint Data Augmentation Based on MOGP
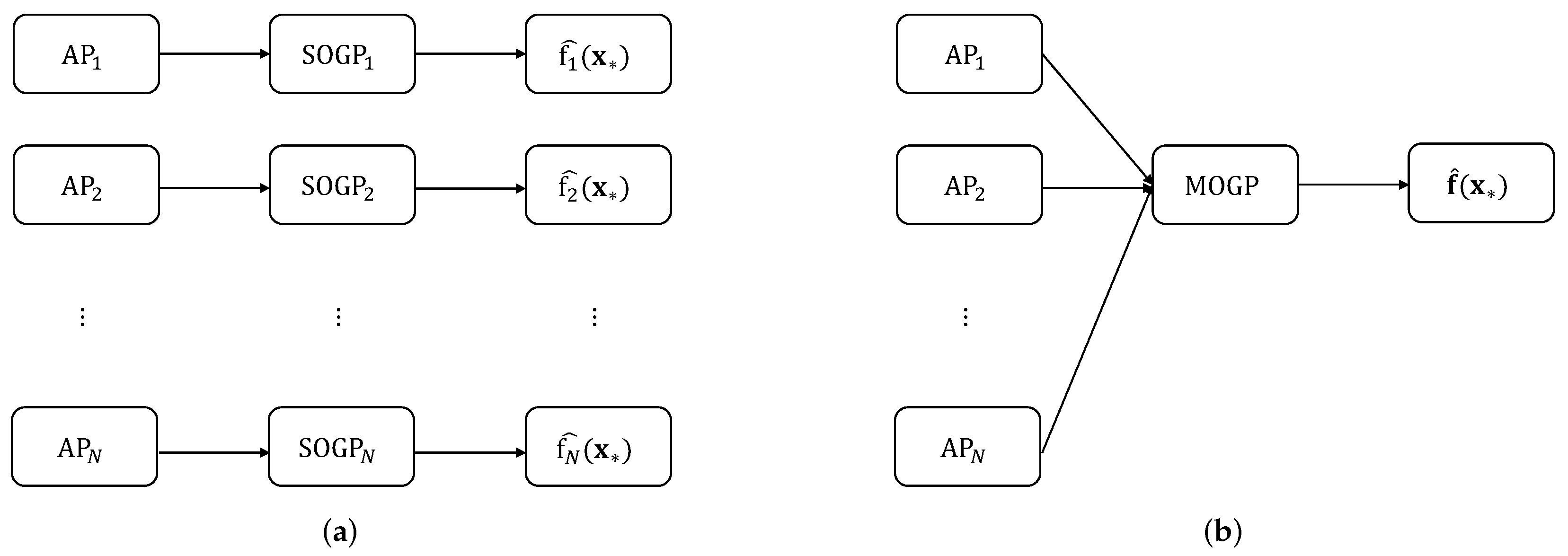
3.1. Single-Output to Multi-Output Gaussian Process
3.2. Linear Models Based on Symmetric MOGP
3.3. Kernels
3.4. Data Augmentation Modes
3.4.1. By a Single Floor
3.4.2. By Neighboring Floors
3.4.3. By a Single Building
4. Experimental Results
4.1. Experimental Setup
4.2. Effects of the Proposed MOGP-Based Data Augmentation on Indoor Localization Performance
4.2.1. Data Augmentation Modes
4.2.2. Number of LMC Latent Functions
4.2.3. Augmentation Ratio
4.2.4. Kernels
4.2.5. Kernel Hyperparameters
4.3. Comparison with the State of the Art
5. Comparison to Related Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Leandro, R.; Landau, H.; Nitschke, M.; Glocker, M.; Seeger, S.; Chen, X.; Deking, A.; BenTahar, M.; Zhang, F.; Ferguson, K.; et al. RTX positioning: The next generation of cm-accurate real-time GNSS positioning. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 1460–1475. [Google Scholar]
- van Diggelen, F. Indoor GPS theory & implementation. In Proceedings of the 2002 IEEE Position Location and Navigation Symposium (IEEE Cat. No. 02CH37284), Palm Springs, CA, USA, 15–18 April 2002; pp. 240–247. [Google Scholar] [CrossRef]
- Kemper, J.; Linde, H. Challenges of passive infrared indoor localization. In Proceedings of the 2008 5th Workshop on Positioning, Navigation and Communication, Hanover, Germany, 27 March 2008; pp. 63–70. [Google Scholar]
- Kim, H.S.; Choi, J.S. Advanced indoor localization using ultrasonic sensor and digital compass. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 14–17 October 2008; pp. 223–226. [Google Scholar]
- Poulose, A.; Han, D.S. UWB indoor localization using deep learning LSTM networks. Appl. Sci. 2020, 10, 6290. [Google Scholar] [CrossRef]
- Sugano, M.; Kawazoe, T.; Ohta, Y.; Murata, M. Indoor Localization System using RSSI Measurement of Wireless Sensor Network based on ZigBee Standard. Wirel. Opt. Commun. 2006, 538, 1–6. [Google Scholar]
- Altini, M.; Brunelli, D.; Farella, E.; Benini, L. Bluetooth indoor localization with multiple neural networks. In Proceedings of the IEEE 5th International Symposium on Wireless Pervasive Computing 2010, Modena, Italy, 5–7 May 2010; pp. 295–300. [Google Scholar]
- Kim, K.S.; Lee, S.; Huang, K. A scalable deep neural network architecture for multi-building and multi-floor indoor localization based on Wi-Fi fingerprinting. Big Data Anal. 2018, 3, 4. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, X.; Liu, K.; Zhang, S. Localization and Tracking of an Indoor Autonomous Vehicle Based on the Phase Difference of Passive UHF RFID Signals. Sensors 2021, 21, 3286. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Elesawi, A.E.A.; Kim, K.S. Hierarchical Multi-Building Furthermore, Multi-Floor Indoor Localization Based On Recurrent Neural Networks. arXiv 2021, arXiv:2112.12478. [Google Scholar]
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An Improved K-Nearest-Neighbor Indoor Localization Method Based on Spearman Distance. IEEE Signal Process. Lett. 2016, 23, 351–355. [Google Scholar] [CrossRef]
- Tang, Z.; Li, S.; Kim, K.S.; Smith, J.S. Multi-Output Gaussian Process-Based Data Augmentation for Multi-Building and Multi-Floor Indoor Localization. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 361–366. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Martínez-Usó, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014; pp. 261–270. [Google Scholar] [CrossRef]
- Lohan, E.S.; Torres-Sospedra, J.; Leppäkoski, H.; Richter, P.; Peng, Z.; Huerta, J. Wi-Fi crowdsourced fingerprinting dataset for indoor positioning. Data 2017, 2, 32. [Google Scholar] [CrossRef]
- Niu, J.; Wang, B.; Cheng, L.; Rodrigues, J.J.P.C. WicLoc: An indoor localization system based on WiFi fingerprints and crowdsourcing. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 3008–3013. [Google Scholar] [CrossRef]
- Frid-Adar, M.; Klang, E.; Amitai, M.; Goldberger, J.; Greenspan, H. Synthetic data augmentation using GAN for improved liver lesion classification. In Proceedings of the 2018 IEEE 15th International Symposium on Biomedical Imaging (ISBI 2018), Washington, DC, USA, 4–7 April 2018; pp. 289–293. [Google Scholar] [CrossRef]
- Hussain, Z.; Gimenez, F.; Yi, D.; Rubin, D. Differential data augmentation techniques for medical imaging classification tasks. In Proceedings of the AMIA Annual Symposium Proceedings, Washington, DC, USA, 4–8 November 2017; Volume 2017, p. 979. [Google Scholar]
- Lan, T.; Wang, X.; Chen, Z.; Zhu, J.; Zhang, S. Fingerprint Augment Based on Super-Resolution for WiFi Fingerprint Based Indoor Localization. IEEE Sens. J. 2022, 22, 12152–12162. [Google Scholar] [CrossRef]
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 1–48. [Google Scholar] [CrossRef]
- Wei, J.; Zou, K. Eda: Easy data augmentation techniques for boosting performance on text classification tasks. arXiv 2019, arXiv:1901.11196. [Google Scholar]
- Li, X.; Ye, P.; Jin, J.; Zhu, F.; Wang, F.Y. Data Augmented Deep Behavioral Cloning for Urban Traffic Control Operations Under a Parallel Learning Framework. IEEE Trans. Intell. Transp. Syst. 2022, 23, 5128–5137. [Google Scholar] [CrossRef]
- Sinha, R.S.; Hwang, S.H. Improved RSSI-Based Data Augmentation Technique for Fingerprint Indoor Localisation. Electronics 2020, 9, 851. [Google Scholar] [CrossRef]
- Sinha, R.S.; Lee, S.M.; Rim, M.; Hwang, S.H. Data augmentation schemes for deep learning in an indoor positioning application. Electronics 2019, 8, 554. [Google Scholar] [CrossRef]
- Njima, W.; Chafii, M.; Chorti, A.; Shubair, R.M.; Poor, H.V. Indoor localization using data augmentation via selective generative adversarial networks. IEEE Access 2021, 9, 98337–98347. [Google Scholar] [CrossRef]
- Hilal, A.; Arai, I.; El-Tawab, S. DataLoc+: A Data Augmentation Technique for Machine Learning in Room-Level Indoor Localization. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Rizk, H.; Shokry, A.; Youssef, M. Effectiveness of Data Augmentation in Cellular-based Localization Using Deep Learning. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Jan, S.S.; Yeh, S.J.; Liu, Y.W. Received Signal Strength Database Interpolation by Kriging for a Wi-Fi Indoor Positioning System. Sensors 2015, 15, 21377–21393. [Google Scholar] [CrossRef] [PubMed]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; Adaptive Computation and Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Liu, H.; Cai, J.; Ong, Y.S. Remarks on multi-output Gaussian process regression. Knowl.-Based Syst. 2018, 144, 102–121. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Bonilla, E.V. Collaborative Multi-output Gaussian Processes. In Proceedings of the Thirtieth Conference on Uncertainty in Artificial Intelligence (UAI), Quebec City, QC, Canada, 23–27 July 2014; pp. 643–652. [Google Scholar]
- Fricker, T.E.; Oakley, J.E.; Urban, N.M. Multivariate Gaussian process emulators with nonseparable covariance structures. Technometrics 2013, 55, 47–56. [Google Scholar] [CrossRef]
- Kanagawa, M.; Hennig, P.; Sejdinovic, D.; Sriperumbudur, B.K. Gaussian Processes and Kernel Methods: A Review on Connections and Equivalences. arXiv 2018, arXiv:1807.02582. [Google Scholar]
- Wilson, A.; Adams, R. Gaussian process kernels for pattern discovery and extrapolation. In Proceedings of the International Conference on Machine Learning, Atlanta, GA, USA, 17–19 June 2013; pp. 1067–1075. [Google Scholar]
- Duvenaud, D. Automatic Model Construction with Gaussian Processes. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 2014. [Google Scholar]
- Genton, M.G. Classes of kernels for machine learning: A statistics perspective. J. Mach. Learn. Res. 2001, 2, 299–312. [Google Scholar]
- Stein, M.L. Interpolation of Spatial Data: Some Theory for Kriging; Springer Science & Business Media: New York, NY, USA, 1999. [Google Scholar]
- Moreira, A.; Nicolau, M.J.a.; Meneses, F.; Costa, A. Wi-Fi fingerprinting in the real world—RTLSUM at the EvAAL competition. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Sheffield Machine Learning Group. GPy—A Gaussian Process (GP) Framework in Python. Available online: https://sheffieldml.github.io/GPy/ (accessed on 1 February 2024).
- Chen, L.; Zhang, S.; Tan, H.; Lv, B. Progressive RSS Data Augmenter With Conditional Adversarial Networks. IEEE Access 2020, 8, 26975–26983. [Google Scholar] [CrossRef]
- Xiao, L.; Behboodi, A.; Mathar, R. A deep learning approach to fingerprinting indoor localization solutions. In Proceedings of the 2017 27th International Telecommunication Networks and Applications Conference (ITNAC), Melbourne, VIC, Australia, 22–24 November 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Sugasaki, M.; Shimosaka, M. Robustifying Wi-Fi Localization by between-Location Data Augmentation. IEEE Sens. J. 2022, 22, 5407–5416. [Google Scholar] [CrossRef]
- Bi, J. Supplementary Open Dataset for WiFi Fingerprint-Based Indoor Localization. Available online: https://github.com/renwudao24/SODIndoorLoc (accessed on 1 February 2024).
- Tang, Z.; Gu, R.; Li, S.; Kim, K.S.; Smith, J. Static vs. dynamic databases for indoor localization based on Wi-Fi fingerprinting: A discussion from a data perspective. In Proceedings of the Sixth International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Osaka, Japan, 19–22 February 2024; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| SAE Hidden Layers | 256-128-64 |
| SAE Activation | ReLU |
| SAE Optimizer | Adam |
| SAE Loss | MSE |
| Common Hidden Layers | 128-128 |
| Common Activation | ReLU |
| Common Dropout | 0.2 |
| Common Loss | MSE |
| LSTM Cells | 256-512 |
| LSTM Activation | ReLU |
| LSTM Optimizer | Adam |
| LSTM Loss | MSE |
| Building/Floor Classifier Hidden Layers | 32-1 |
| Building/Floor Classifier Activation | MSE |
| Building/Floor Classifier Optimizer | Adam |
| Building/Floor Classifier Dropout | 0.2 |
| Building/Floor Classifier Loss | ReLU |
| Position Estimator Hidden Layers | 512-512-2 |
| Position Estimator Activation | MSE |
| Position Estimator Optimizer | Adam |
| Position Estimator Dropout | 0.1 |
| Position Estimator Loss | tanh |
| Building 0 | Building 1 | Building 2 | |
|---|---|---|---|
| Floor 0 | 1059 | 1368 | 1942 |
| Floor 1 | 1356 | 1484 | 2162 |
| Floor 2 | 1443 | 1396 | 1577 |
| Floor 3 | 1391 | 948 | 2709 |
| Floor 4 | N/A | N/A | 1102 |
| Total | 5249 | 5196 | 9492 |
| Parameter | Value |
|---|---|
| Data Augmentation Mode | By a single building |
| Augmentation Ratio (r) | 1 |
| Number of Latent Functions (Q) | N |
| Kernel | Matérn5/2 |
| Variance () | 1 |
| Length scale (l) | 10 |
| Data Augmentation Mode | 3D Error [m] |
|---|---|
| By a single floor | 8.67 |
| By neighboring floors | 8.60 |
| By a single building | 8.42 |
| Numbers of Latent Functions (Q) | 3D Error [m] |
|---|---|
| 1 | 8.70 |
| 2 | 8.60 |
| 3 | 8.58 |
| 4 | 8.61 |
| N | 8.42 |
| Augmentation Ratio | 0 * | 0.5 | 1 | 5 | 10 |
|---|---|---|---|---|---|
| 3D Error [] | 8.62 | 8.72 | 8.42 | 8.69 | 8.88 |
| Kernel | RBF | RQ * | Matérn3/2 | Matérn5/2 | OU |
|---|---|---|---|---|---|
| 3D Error [] | 8.96 | 9.17 | 8.78 | 8.42 | 8.86 |
| Variance () | 0.1 | 1 | 10 |
|---|---|---|---|
| 3D Error [] | 8.80 | 8.42 | 8.69 |
| Length Scale (l) | 1 | 10 | 100 |
|---|---|---|---|
| 3D Error [] | 8.78 | 8.42 | 8.83 |
| Localization Scheme | Building Hit Rate [%] | Floor Hit Rate [%] | 3D Error [m] |
|---|---|---|---|
| Proposed * | 100 † | 94.20 | 8.42 |
| Hierarchical RNN [12] | 100 | 95.23 | 8.62 |
| MOSAIC [41] | 98.65 | 93.86 | 11.64 |
| HFTS [41] | 100 | 96.25 | 8.49 |
| RTLS@UM [41] | 100 | 93.74 | 6.20 |
| ICSL [41] | 100 | 86.93 | 7.67 |
| Augmentation Scheme | Model Interpretability | Localization Type | Notes |
|---|---|---|---|
| Proposed | High | Multi-Building Multi-Floor | MOGP |
| s-GAN [26] | Low | Single-Floor | GAN |
| DataLoc+ [27] | Low | Single-Floor | Dropout |
| DL Augmentation [25] | Low | Single-Floor | Deep Learning |
| CAN [43] | Low | Single-Floor | Conditional Adversarial Networks |
| DL Approach [44] | Low | Single-Floor | AlexNet |
| Between-Location [45] | Low | Single-Floor | Between-Class Learning |
| Augmentation Scheme | Localization Error [m] | Improvement [m, %] |
|---|---|---|
| s-GAN [26] | 4.1 | - |
| s-GAN with Augmentation * [26] | 3.47 | 0.63, 15.36 |
| Hierarchical RNN [12] | 4.2 | - |
| Hierarchical RNN [12] with MOGP-based Augmentation † | 3.40 ‡ | 0.80, 19.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Z.; Li, S.; Kim, K.S.; Smith, J.S. Multi-Dimensional Wi-Fi Received Signal Strength Indicator Data Augmentation Based on Multi-Output Gaussian Process for Large-Scale Indoor Localization. Sensors 2024, 24, 1026. https://doi.org/10.3390/s24031026
Tang Z, Li S, Kim KS, Smith JS. Multi-Dimensional Wi-Fi Received Signal Strength Indicator Data Augmentation Based on Multi-Output Gaussian Process for Large-Scale Indoor Localization. Sensors. 2024; 24(3):1026. https://doi.org/10.3390/s24031026
Chicago/Turabian StyleTang, Zhe, Sihao Li, Kyeong Soo Kim, and Jeremy S. Smith. 2024. "Multi-Dimensional Wi-Fi Received Signal Strength Indicator Data Augmentation Based on Multi-Output Gaussian Process for Large-Scale Indoor Localization" Sensors 24, no. 3: 1026. https://doi.org/10.3390/s24031026