Author Contributions
Conceptualization, F.L., N.L., H.G. and L.D.; methodology, F.L. and N.L.; validation, F.L. and N.L.; formal analysis, F.L. and N.L.; investigation, F.L., N.L. and L.D.; data curation, H.G., L.D. and Z.D.; writing—original draft preparation, F.L.; writing—review and editing, N.L., H.G., L.D. and Z.D.; visualization, F.L.; supervision, H.G., L.D., Z.D., H.Y. and Z.L.; funding acquisition, H.G., N.L. and L.D. All authors have read and agreed to the published version of the manuscript.
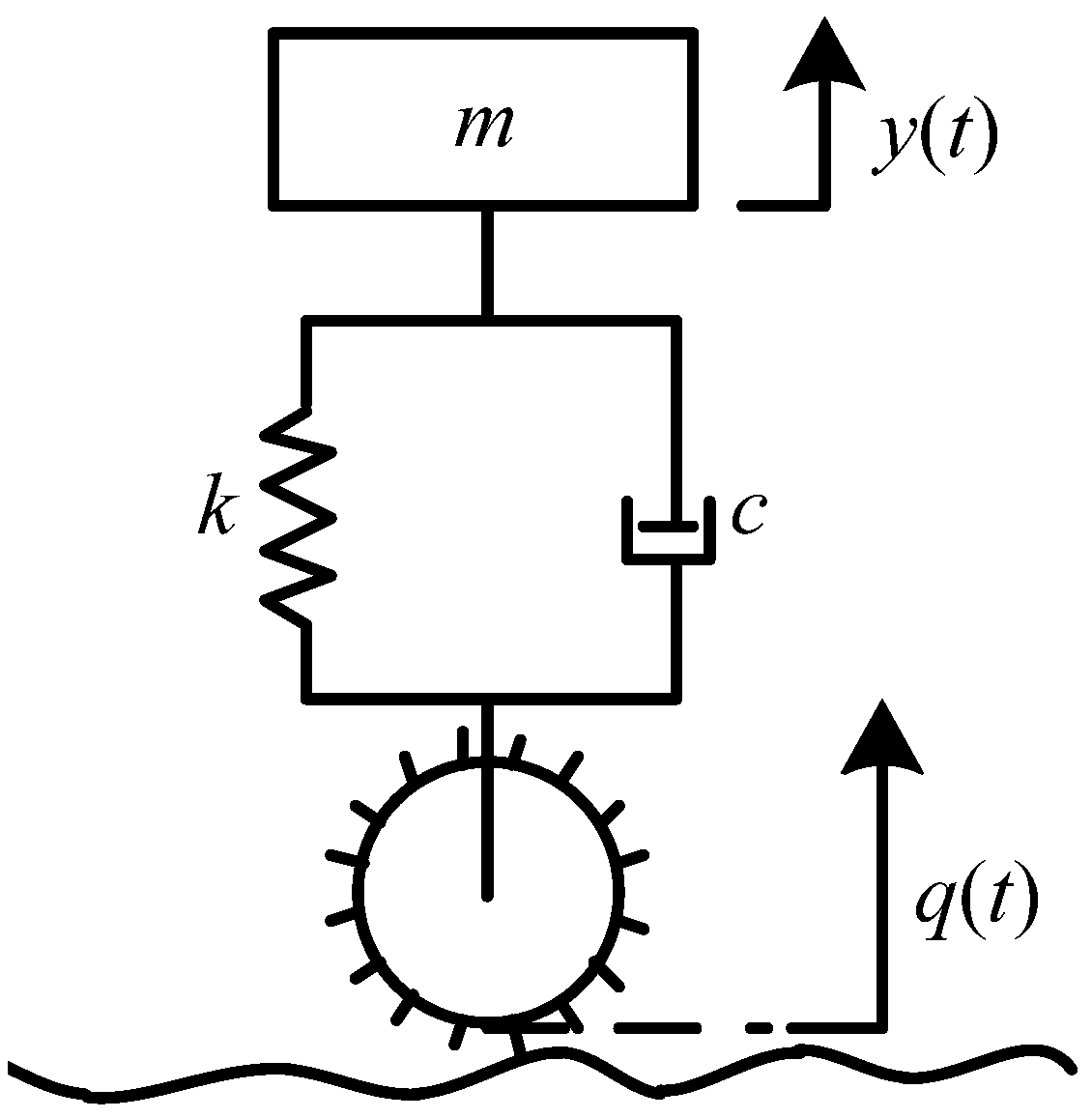
Figure 1.
Model of a rigid lugged wheel traversing on any terrain.
Figure 1.
Model of a rigid lugged wheel traversing on any terrain.
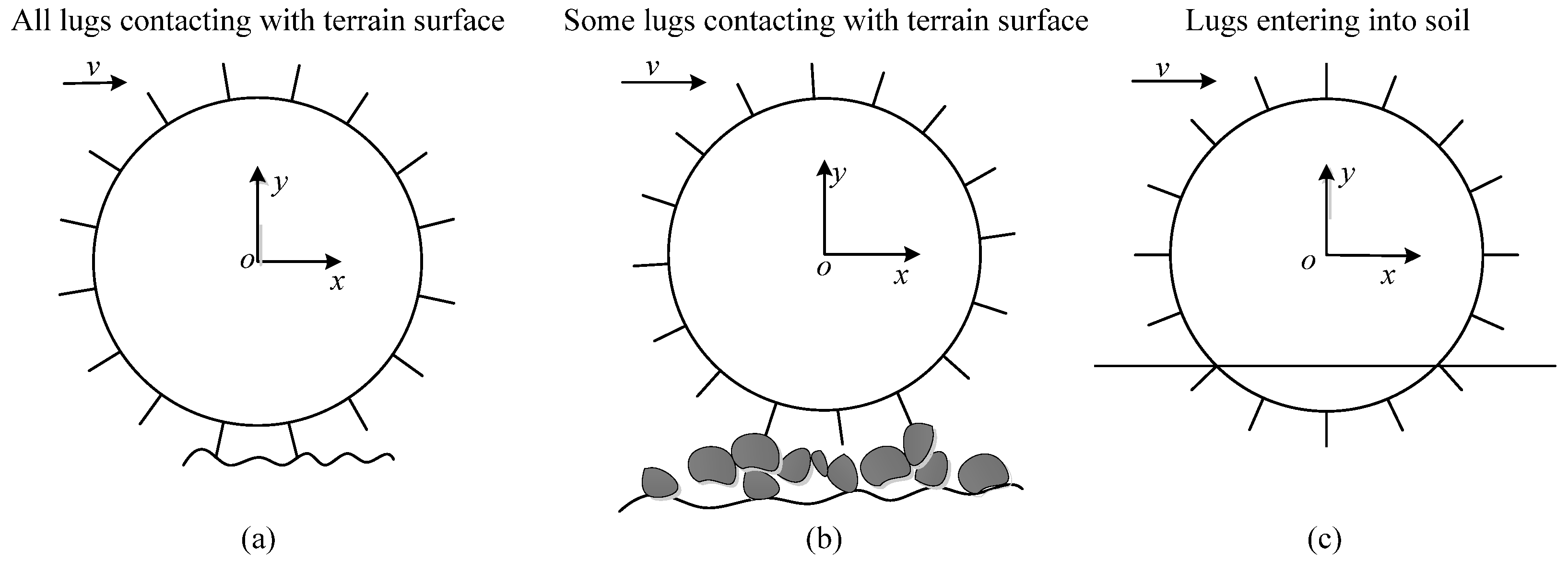
Figure 2.
Wheel–terrain interaction classes (WTICs), with (a) all lugs contacting terrain surface (ALCT), (b) some lugs contacting terrain surface (SLCT), and (c) lugs entering into soil (LEIS).
Figure 2.
Wheel–terrain interaction classes (WTICs), with (a) all lugs contacting terrain surface (ALCT), (b) some lugs contacting terrain surface (SLCT), and (c) lugs entering into soil (LEIS).
Figure 3.
Movement phases of a wheel rotating around the supporting lug when the wheel traverses flat hard terrain.
Figure 3.
Movement phases of a wheel rotating around the supporting lug when the wheel traverses flat hard terrain.
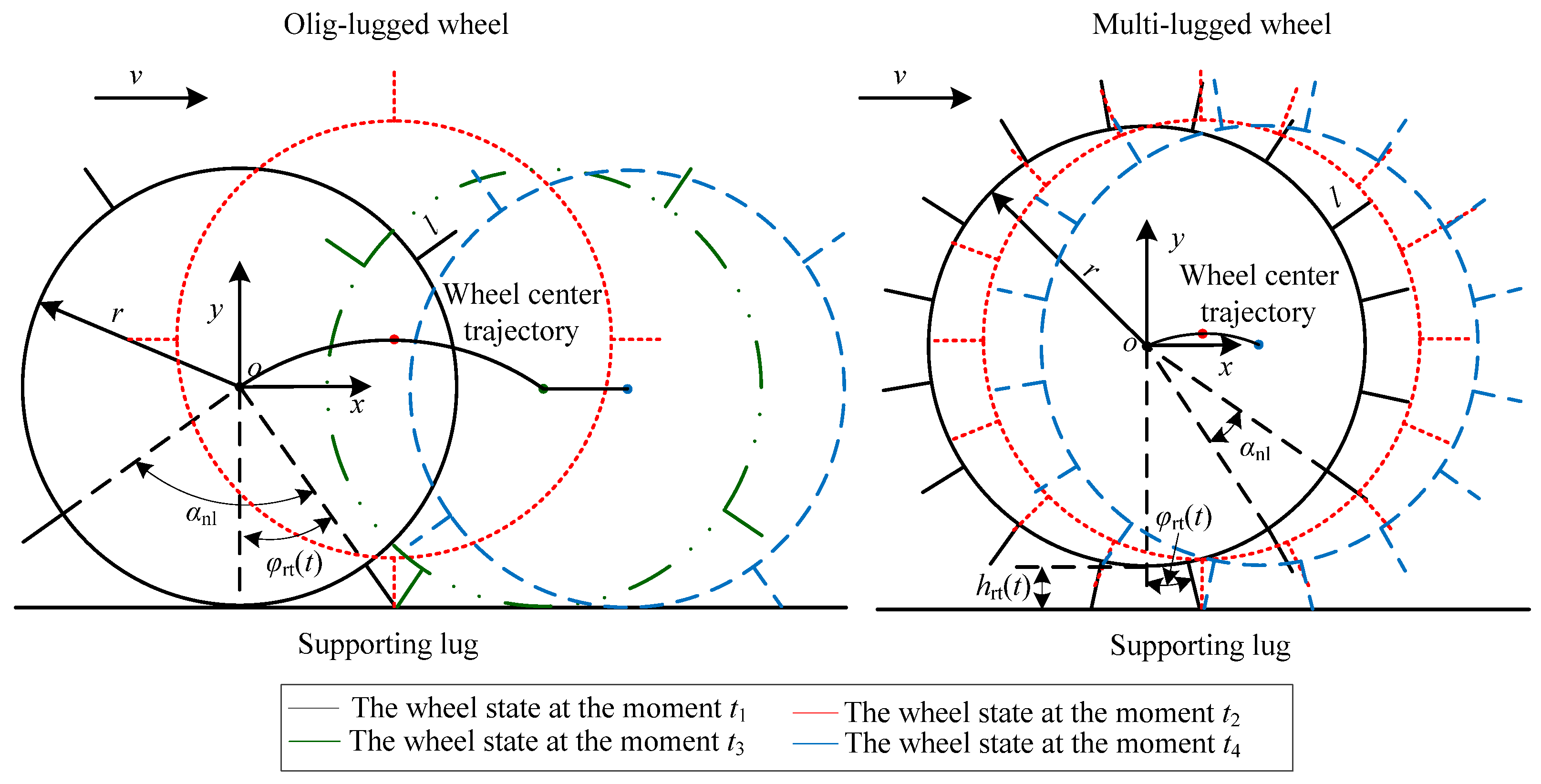
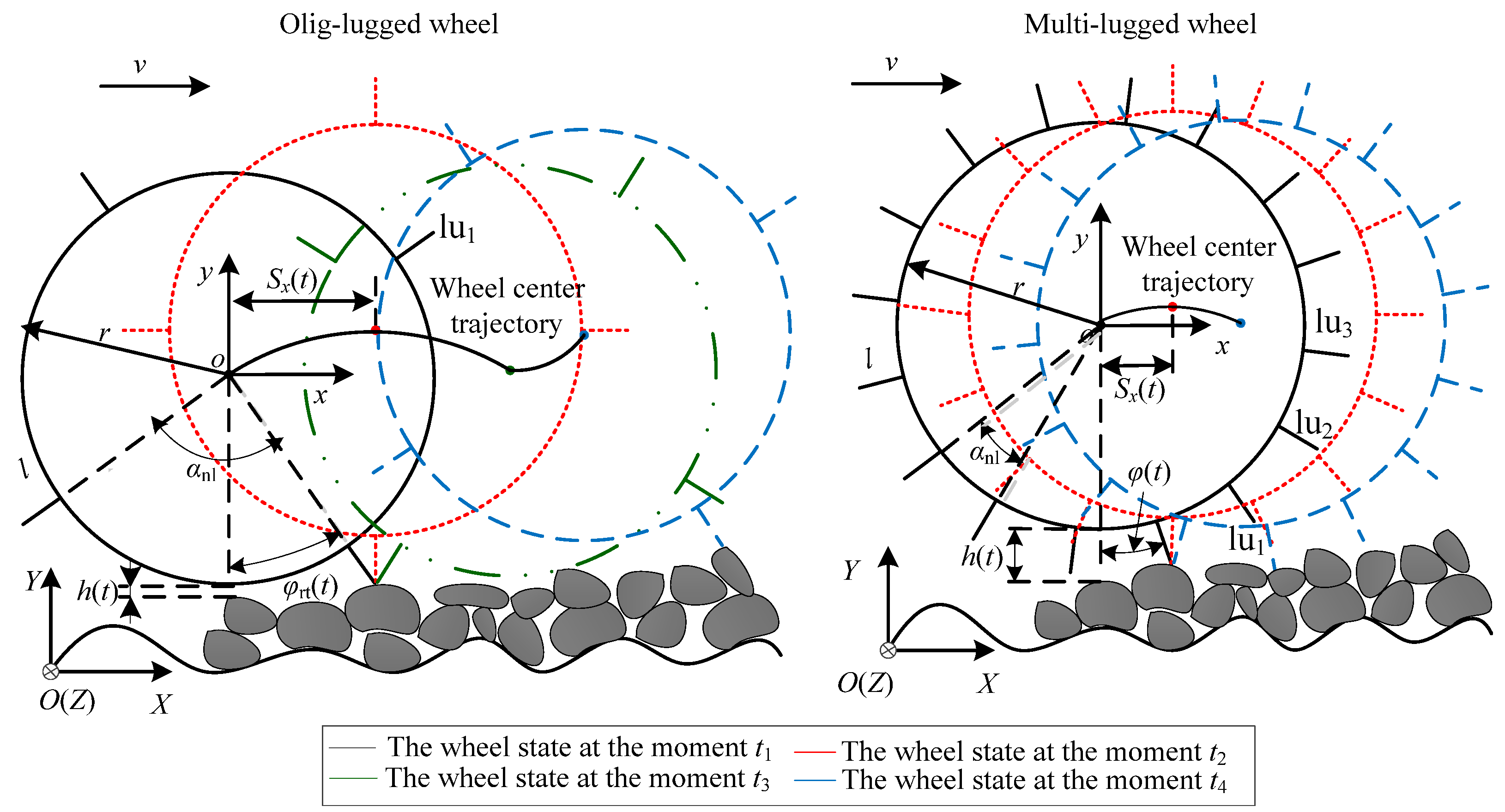
Figure 4.
Wheel motion states of rotating around the supporting lug on natural HT.
Figure 4.
Wheel motion states of rotating around the supporting lug on natural HT.
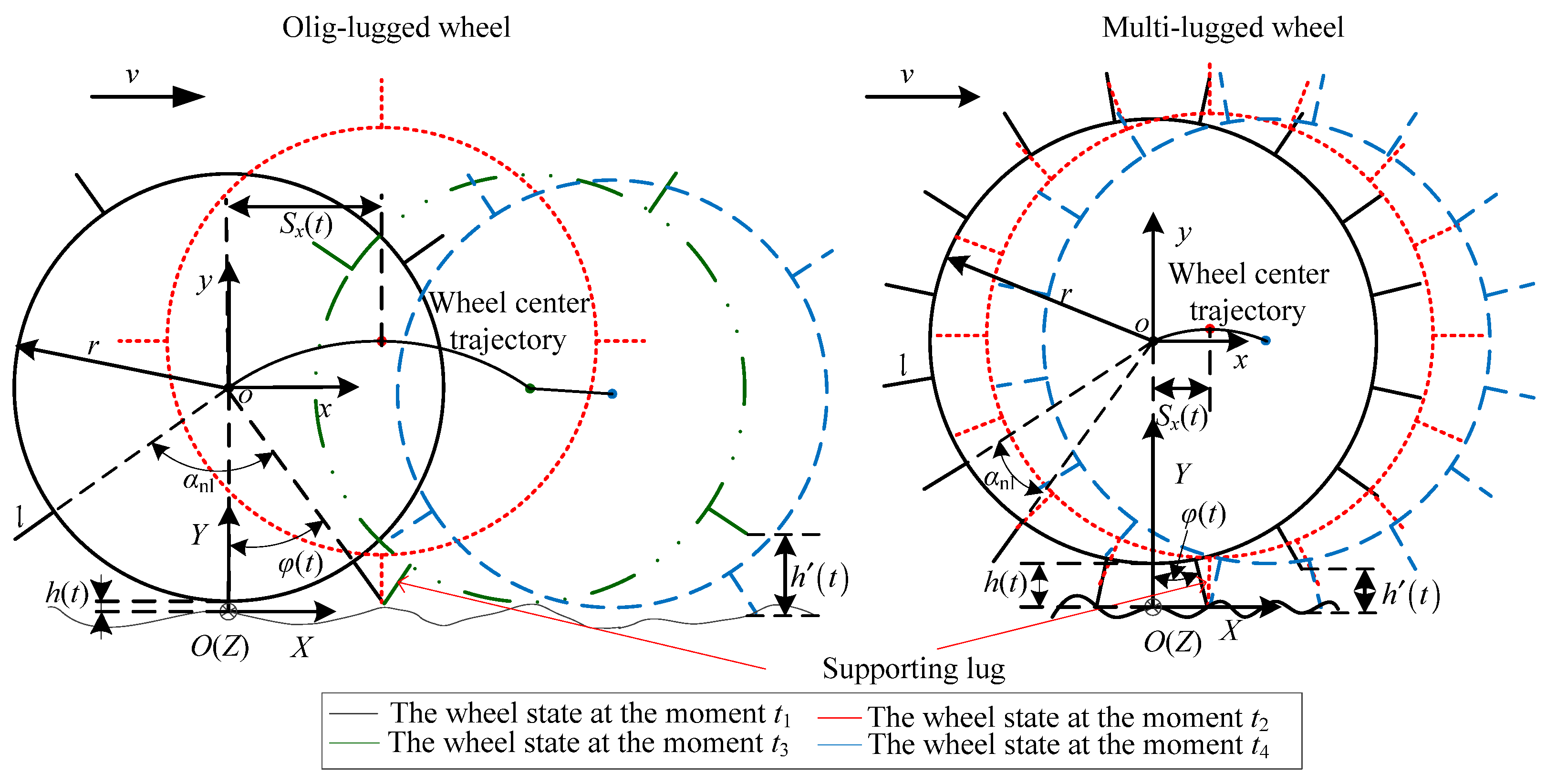
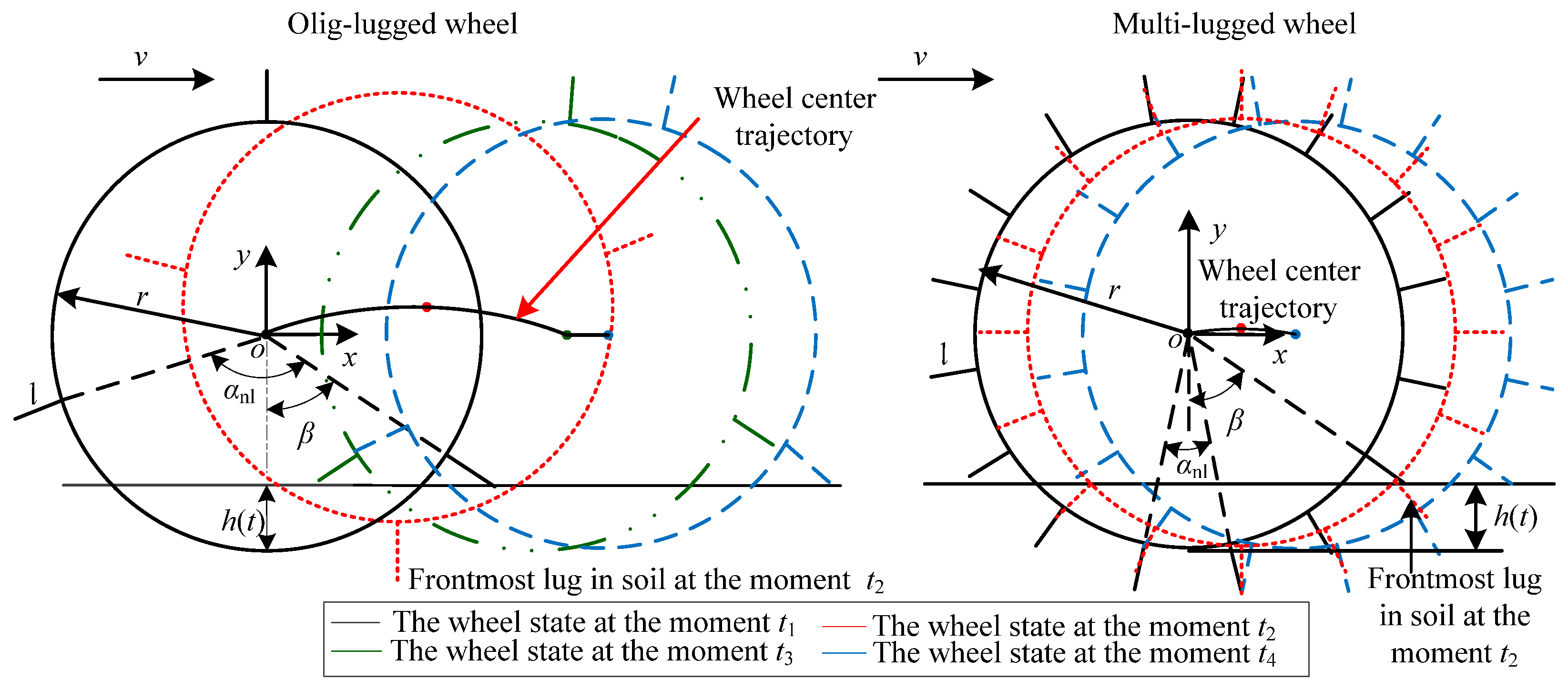
Figure 5.
Wheel motion states of rotating around the supporting lug on GT.
Figure 5.
Wheel motion states of rotating around the supporting lug on GT.
Figure 6.
Wheel motion states when moving on sandy terrain.
Figure 6.
Wheel motion states when moving on sandy terrain.
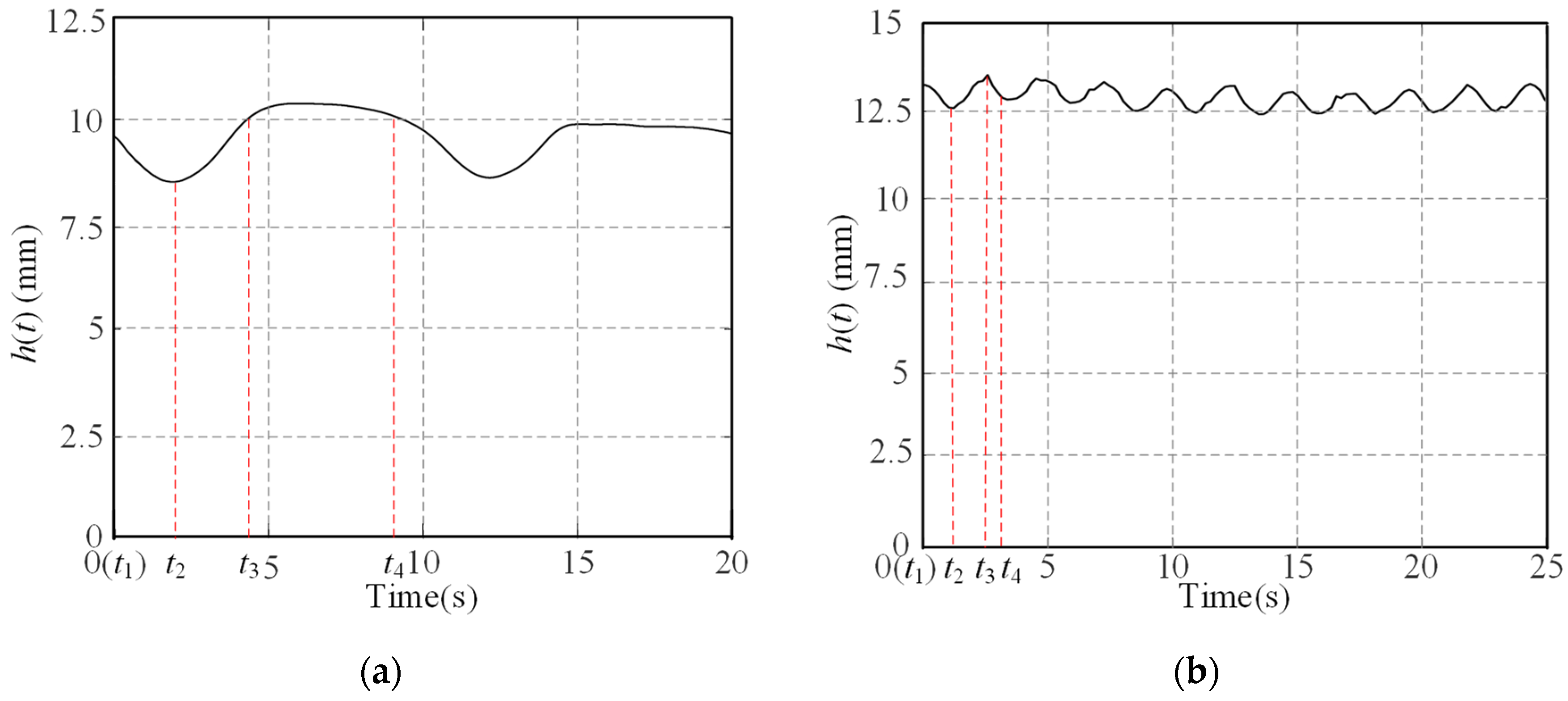
Figure 7.
The distance h(t) between wheel rim’s lowest point and terrain surface, (a) when an olig-lugged wheel moves on ST, (b) when a multi-lugged wheel moves on ST. The black solid line represents the acceleration signal, the red dashed line represents the time point, and the black dashed line represents the coordinate grid.
Figure 7.
The distance h(t) between wheel rim’s lowest point and terrain surface, (a) when an olig-lugged wheel moves on ST, (b) when a multi-lugged wheel moves on ST. The black solid line represents the acceleration signal, the red dashed line represents the time point, and the black dashed line represents the coordinate grid.
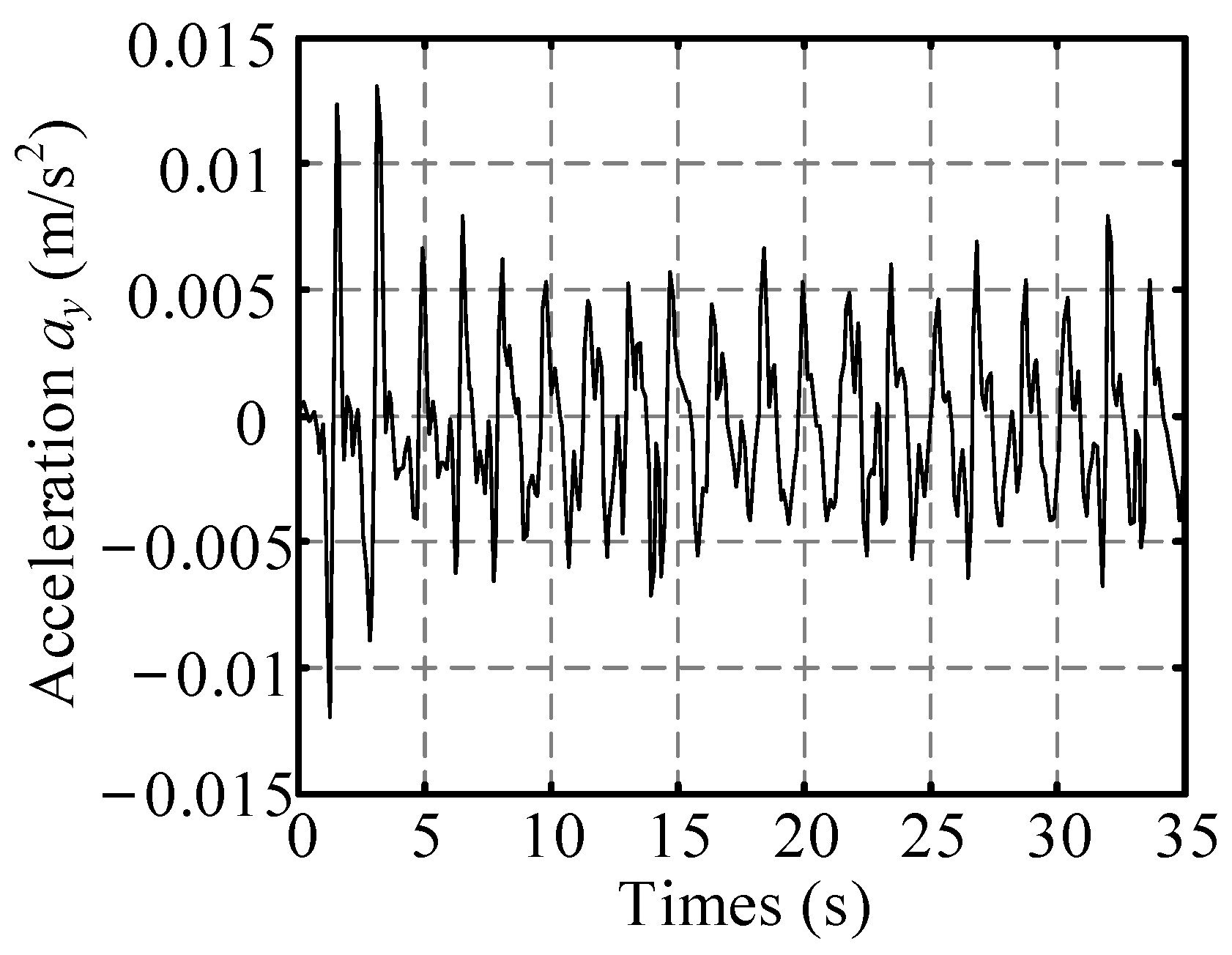
Figure 8.
Sample of vibration acceleration when a wheel moves on ST.
Figure 8.
Sample of vibration acceleration when a wheel moves on ST.
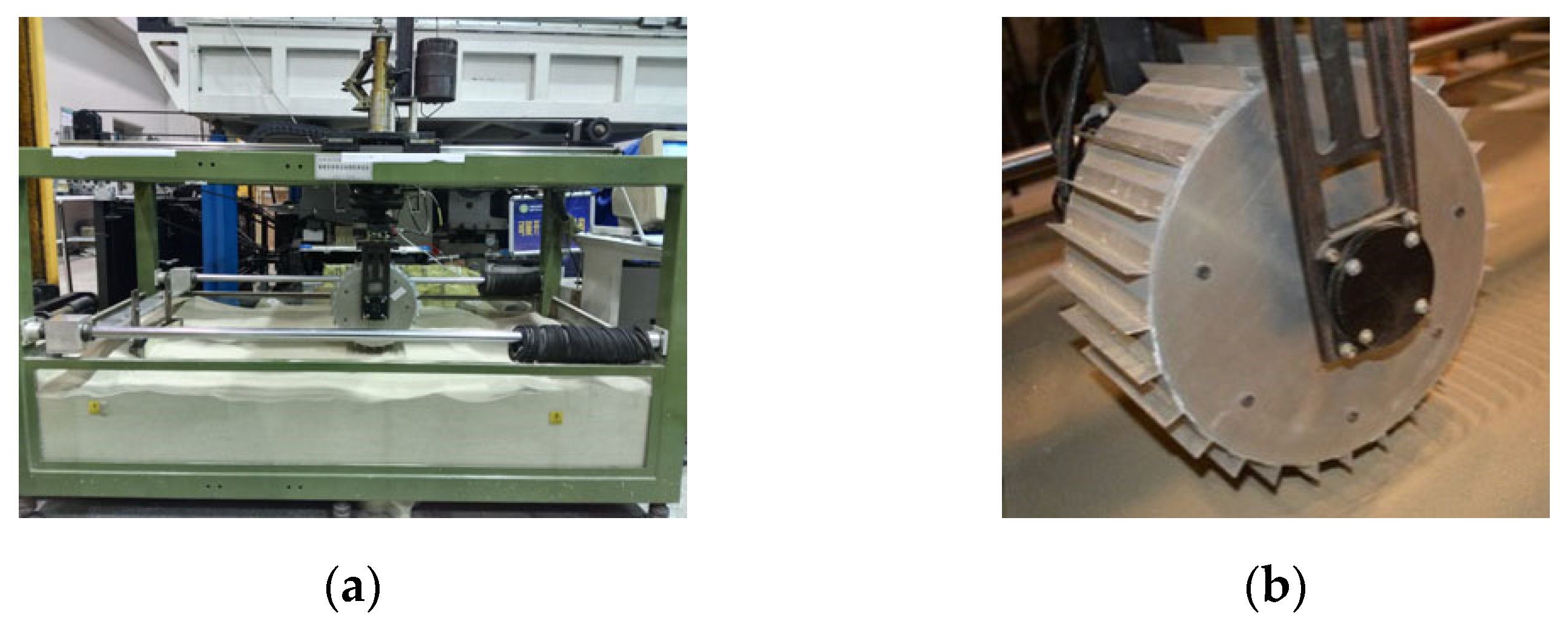
Figure 9.
Experimental equipment, (a) is the wheel–soil interaction test platform and (b) is the experimental wheel.
Figure 9.
Experimental equipment, (a) is the wheel–soil interaction test platform and (b) is the experimental wheel.
Figure 10.
Five terrain classes: (a) HT, (b) GT, (c) ST, (d) HGT, and (e) SGT.
Figure 10.
Five terrain classes: (a) HT, (b) GT, (c) ST, (d) HGT, and (e) SGT.
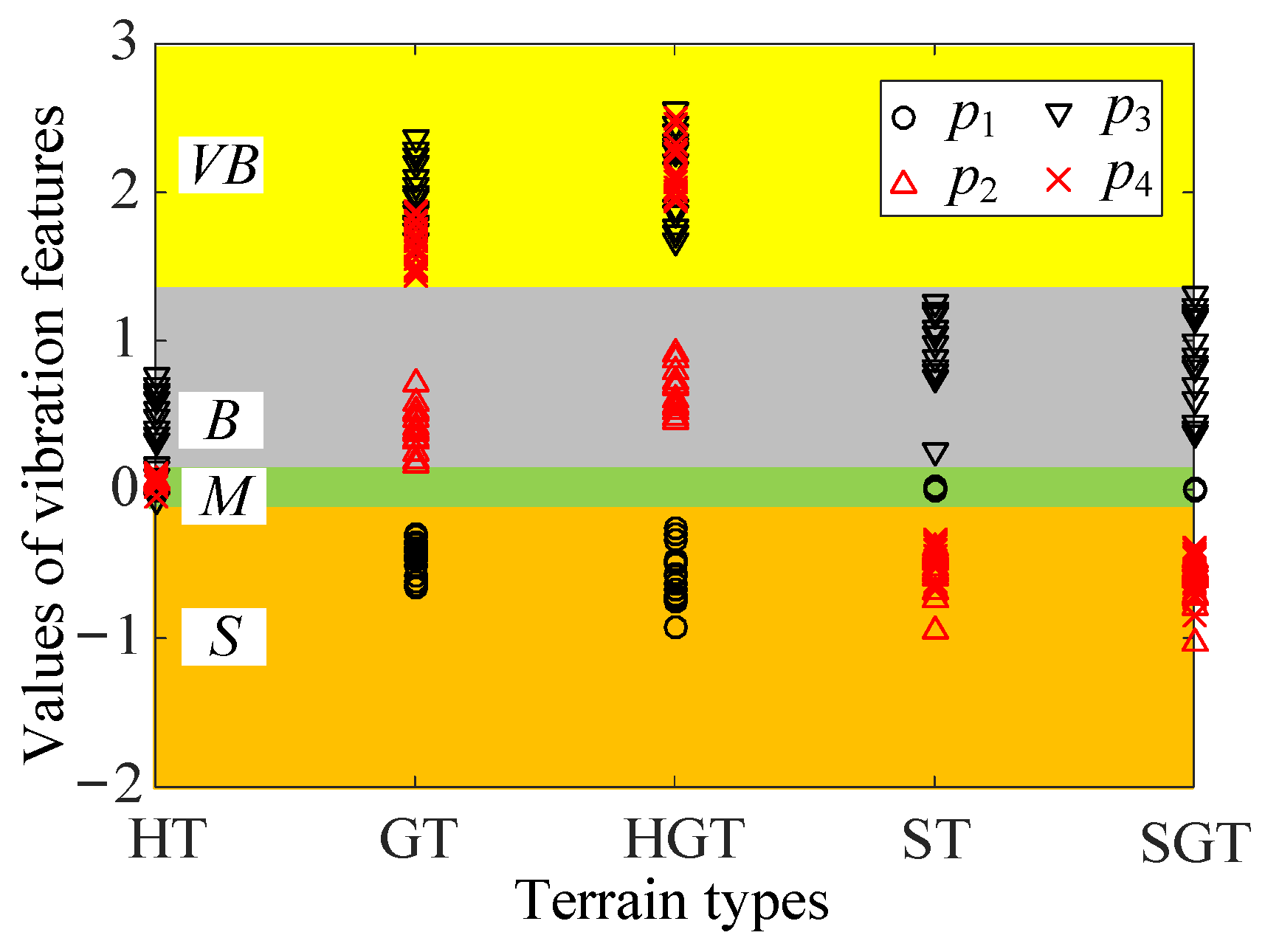
Figure 11.
Values of vibration features for different terrain classes. Vibration features are expressed as the fuzzy set {Small (S), Medium (M), Big (B), Very-Big (VB)}.
Figure 11.
Values of vibration features for different terrain classes. Vibration features are expressed as the fuzzy set {Small (S), Medium (M), Big (B), Very-Big (VB)}.
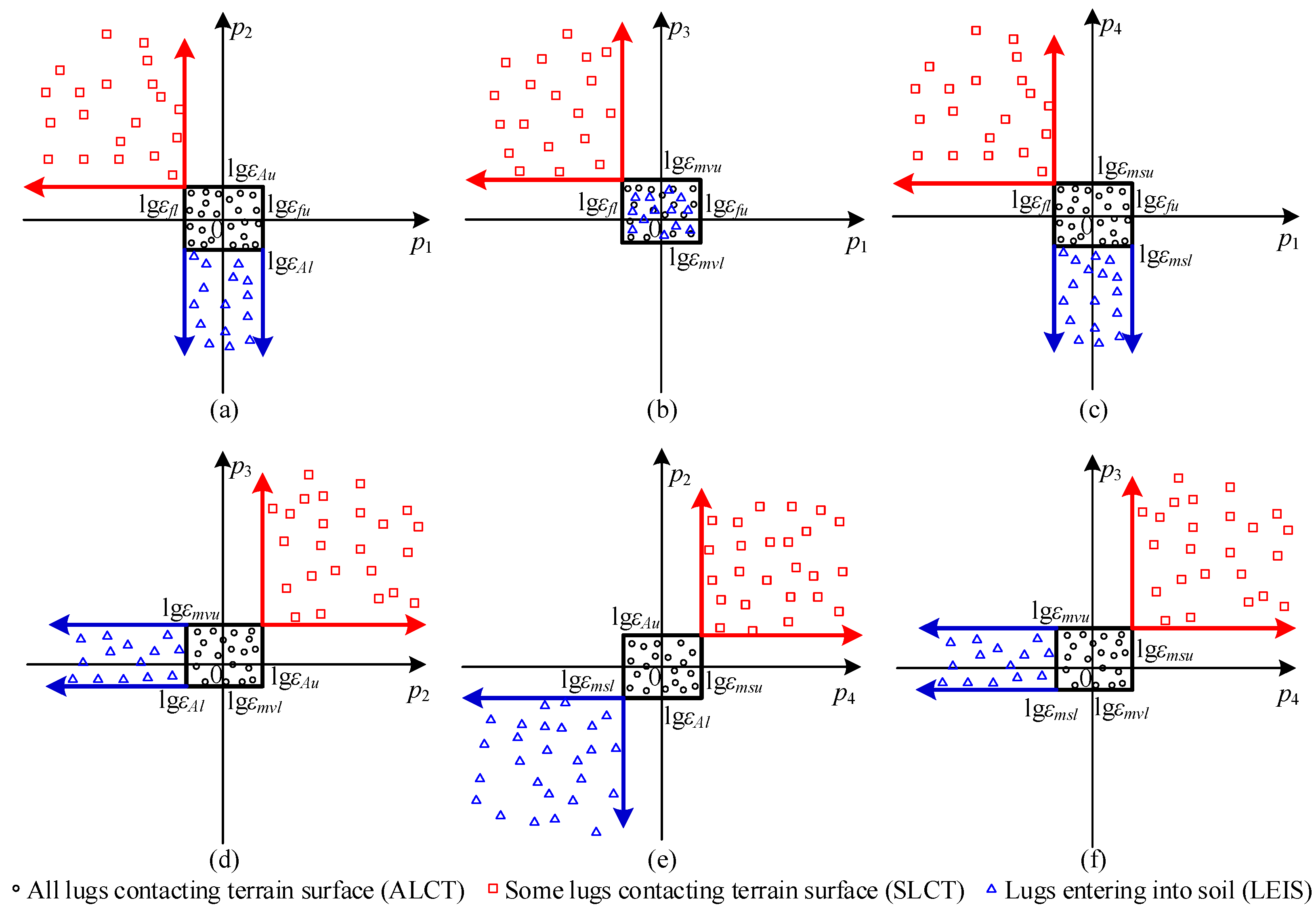
Figure 12.
The regions of feature space formed by the vibration features for different WTICs, with (a) the projection in plane p1p2, (b) the projection in plane p1p3, (c) the projection in plane p1p4, (d) the projection in plane p2p3, (e) the projection in plane p2p4, (f) the projection in plane p3p4.
Figure 12.
The regions of feature space formed by the vibration features for different WTICs, with (a) the projection in plane p1p2, (b) the projection in plane p1p3, (c) the projection in plane p1p4, (d) the projection in plane p2p3, (e) the projection in plane p2p4, (f) the projection in plane p3p4.
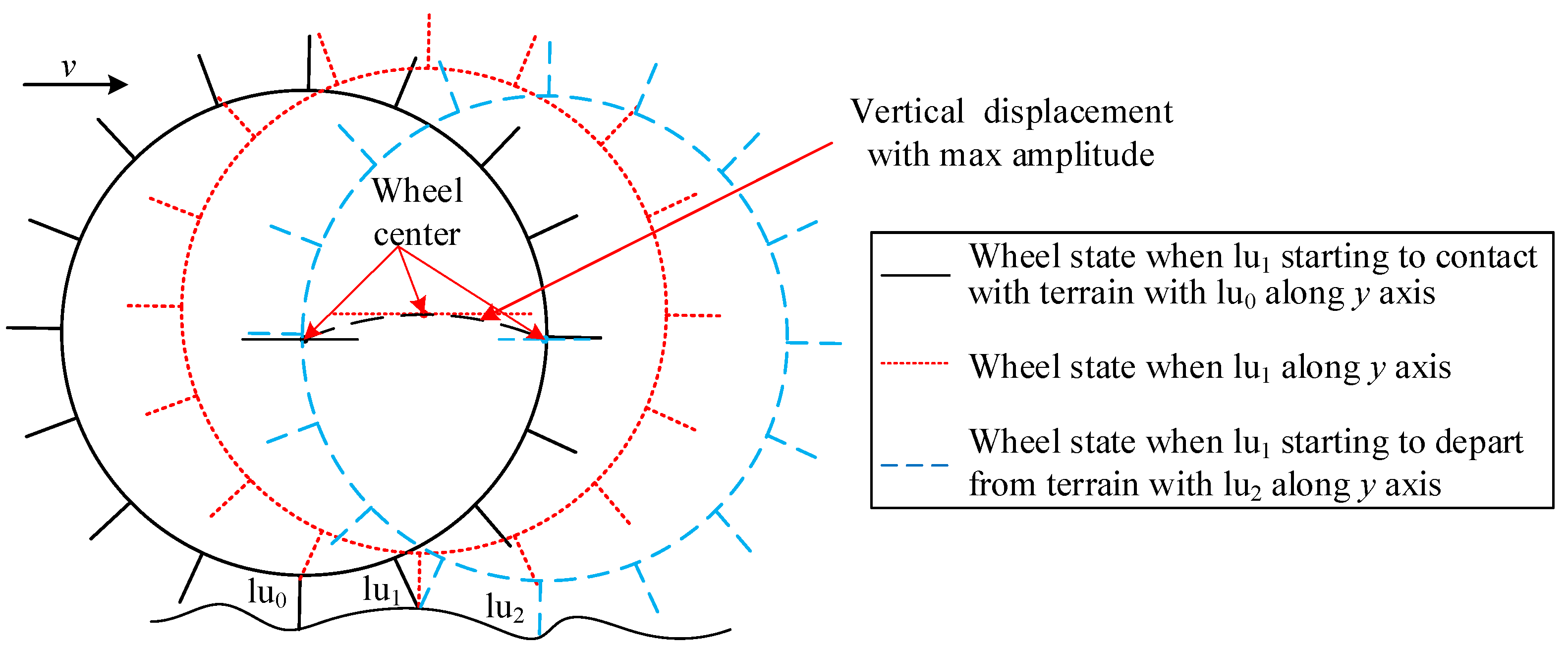
Figure 13.
The wheel–terrain interaction case in which vibration displacement caused by lu1 has the biggest amplitude.
Figure 13.
The wheel–terrain interaction case in which vibration displacement caused by lu1 has the biggest amplitude.
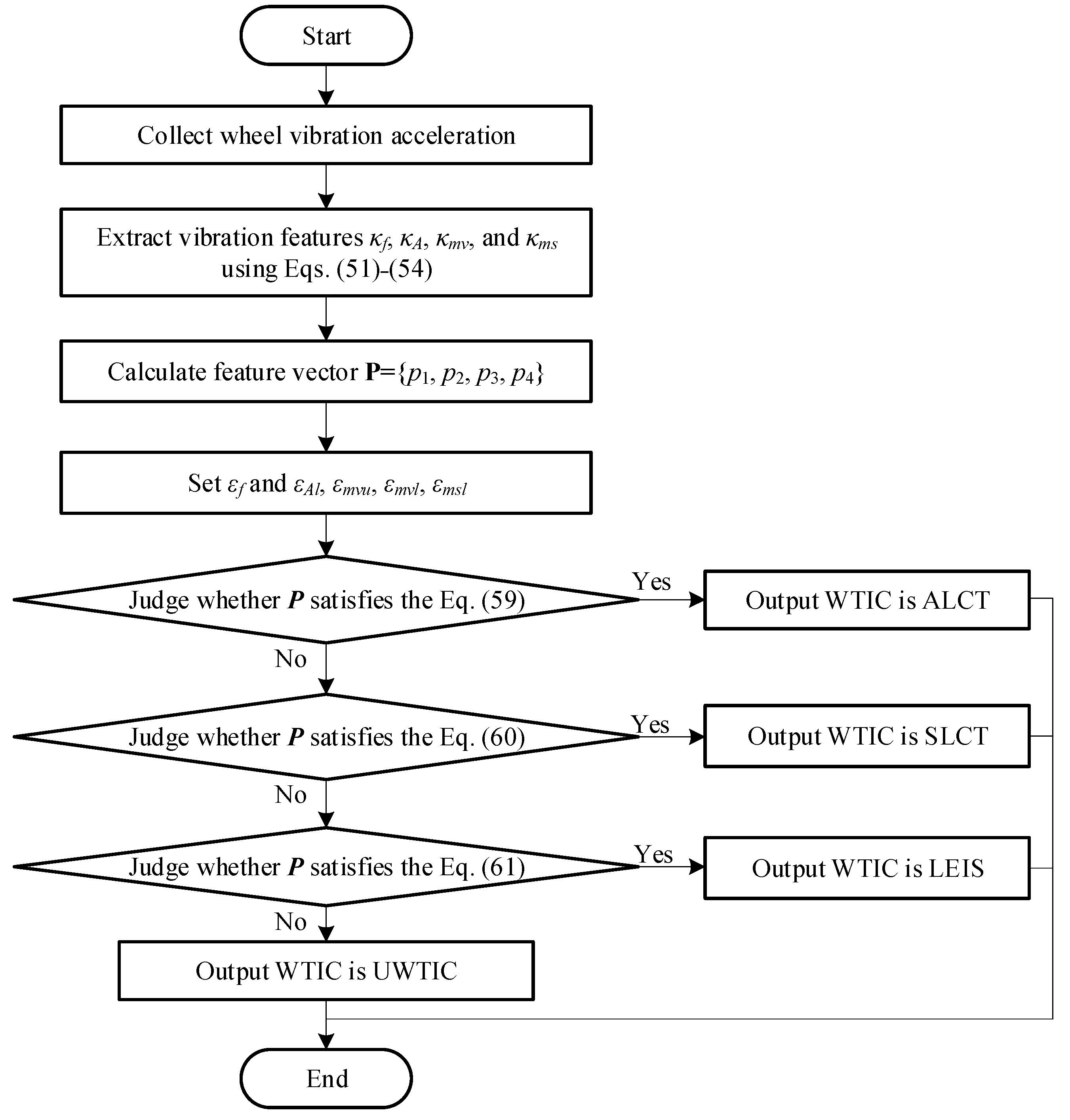
Figure 14.
Flow chart for recognition of wheel–terrain interaction class.
Figure 14.
Flow chart for recognition of wheel–terrain interaction class.
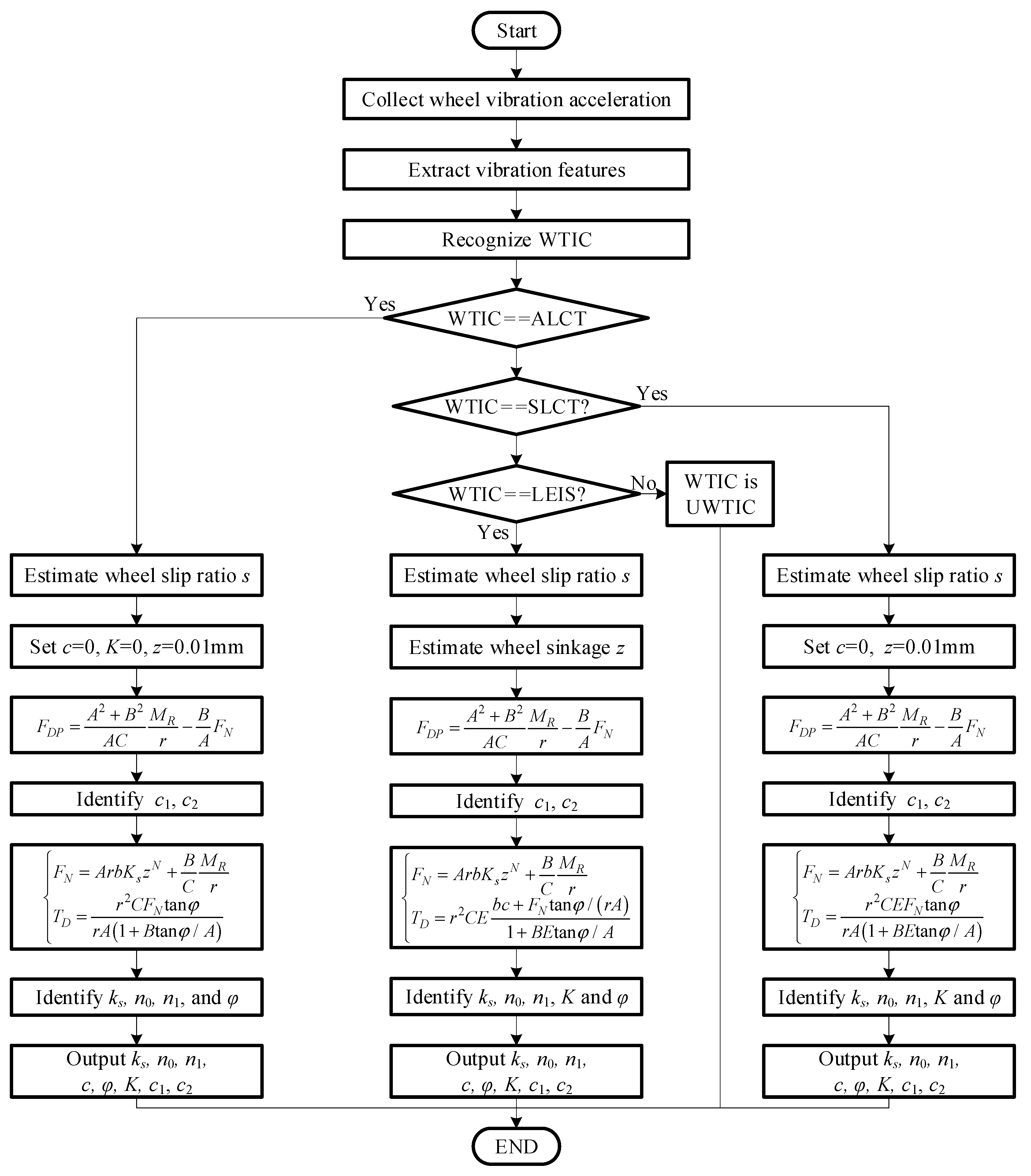
Figure 15.
Flow chart for identifying parameters of various types of terrain.
Figure 15.
Flow chart for identifying parameters of various types of terrain.
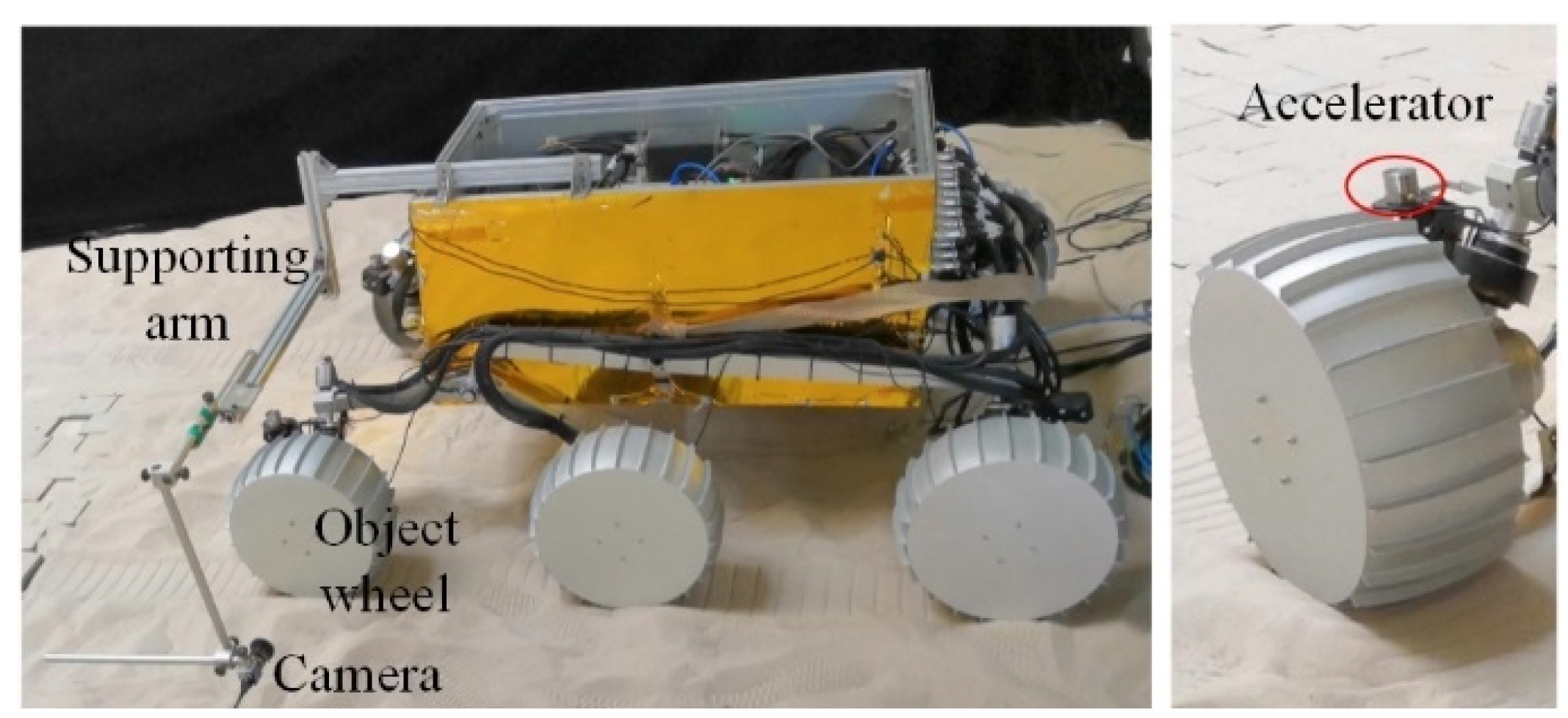
Figure 16.
Planetary Rover Prototype.
Figure 16.
Planetary Rover Prototype.
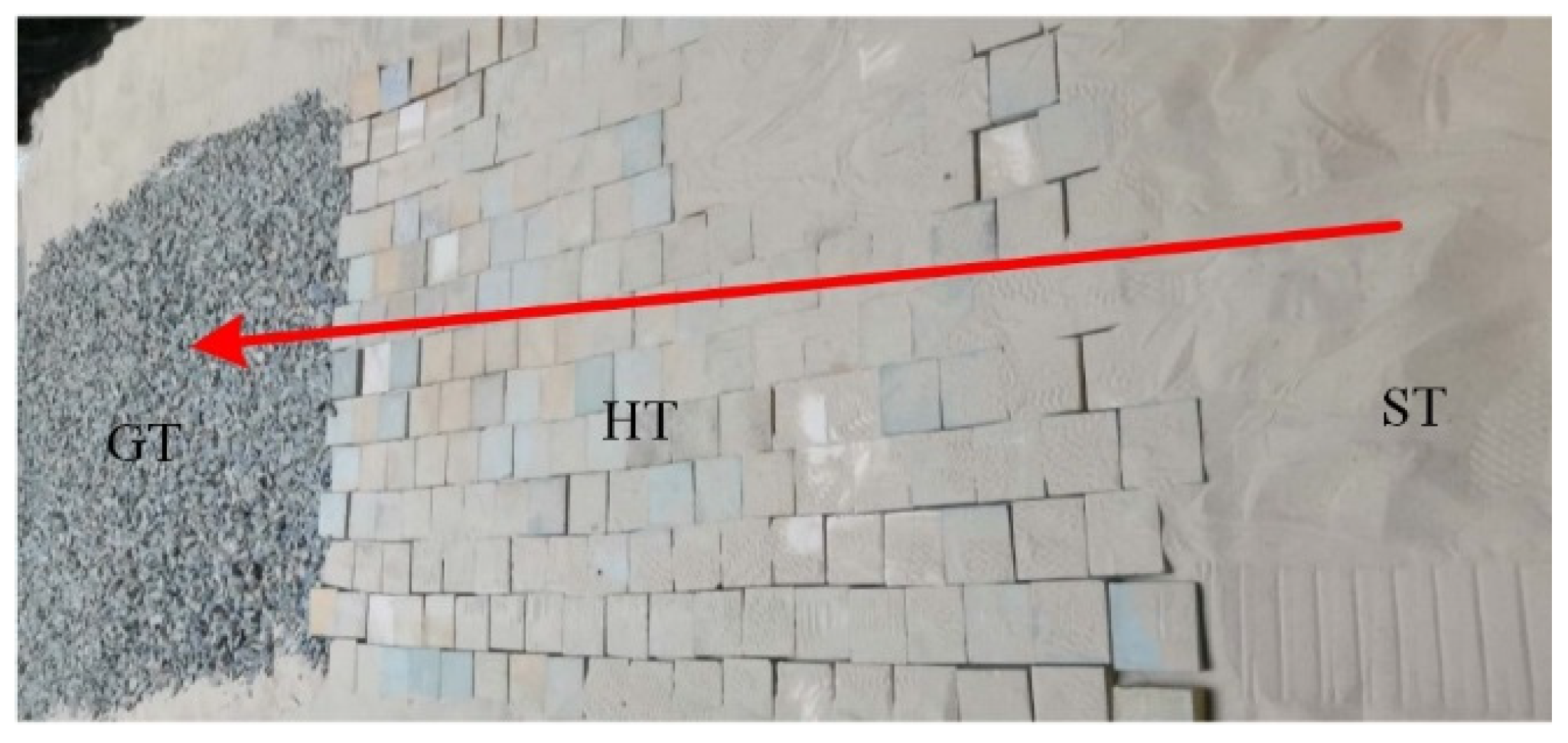
Figure 17.
Terrain environment.
Figure 17.
Terrain environment.
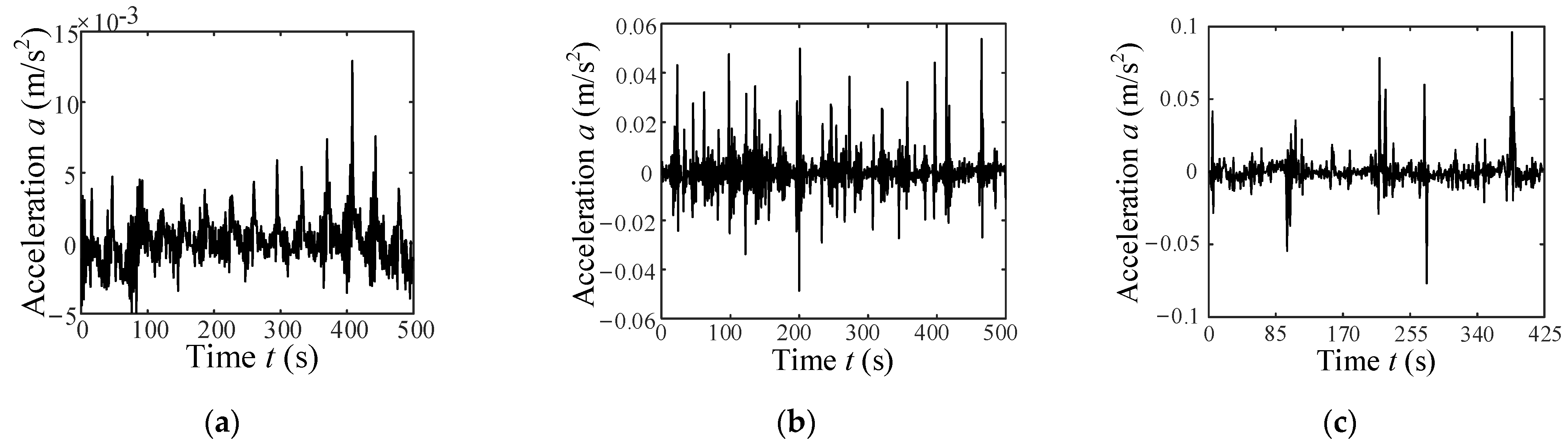
Figure 18.
Down-sampled acceleration signals when a wheel traverses (a) ST, (b) HT, and (c) GT.
Figure 18.
Down-sampled acceleration signals when a wheel traverses (a) ST, (b) HT, and (c) GT.
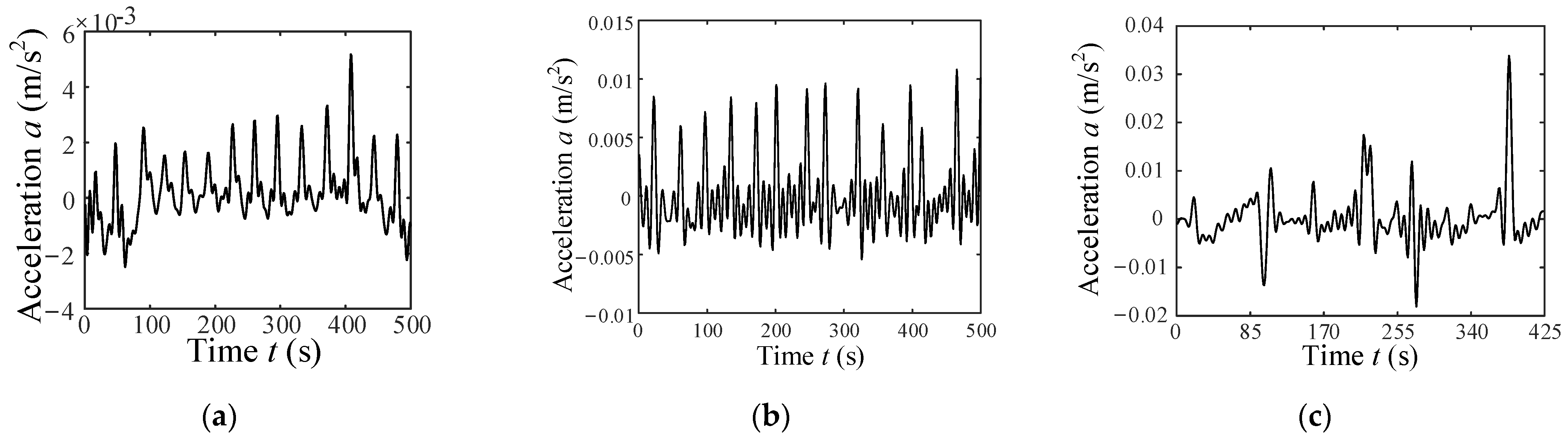
Figure 19.
Low-pass-filtered acceleration signals when a wheel traverses (a) ST, (b) HT, and (c) GT.
Figure 19.
Low-pass-filtered acceleration signals when a wheel traverses (a) ST, (b) HT, and (c) GT.
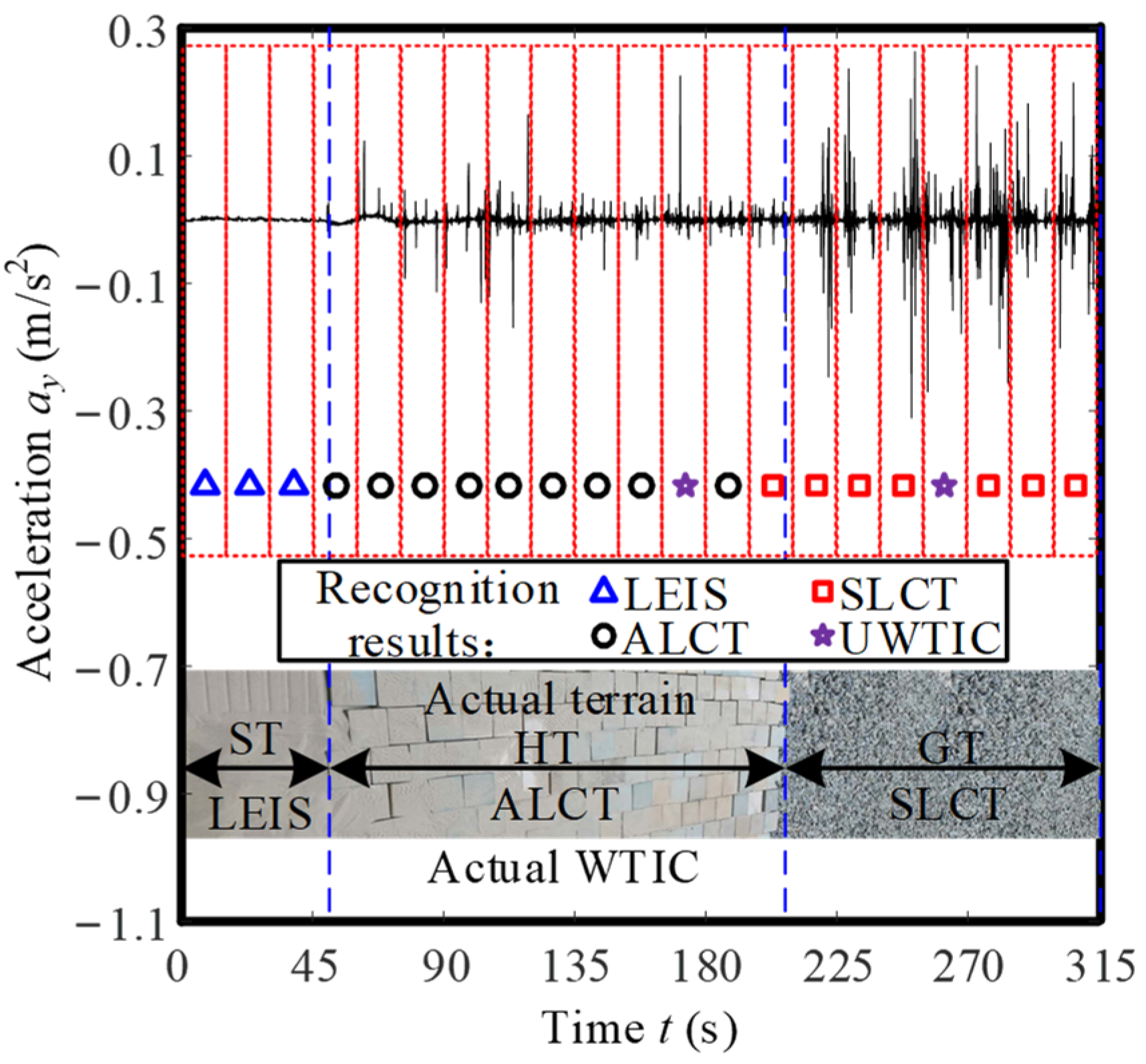
Figure 20.
Vibration acceleration and terrain classification results for distinct single traversals of all three terrain classes.
Figure 20.
Vibration acceleration and terrain classification results for distinct single traversals of all three terrain classes.
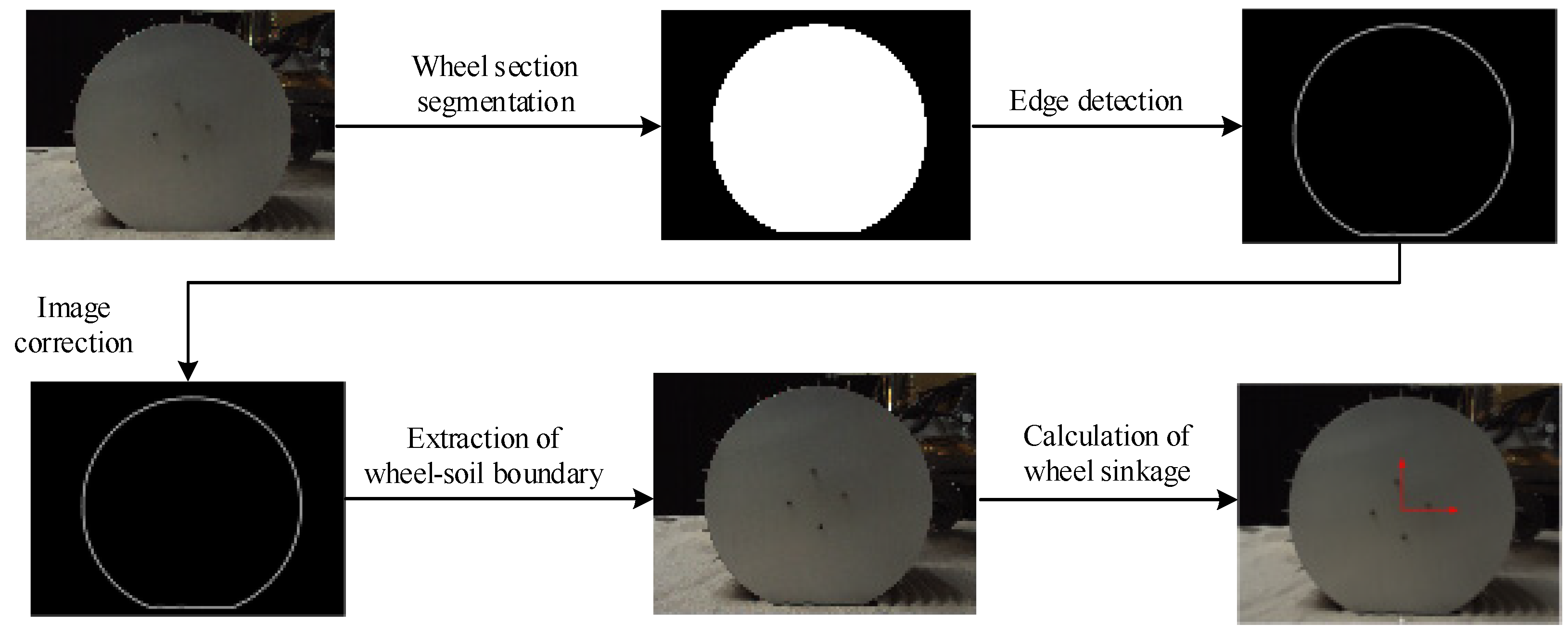
Figure 21.
Flow chart of wheel sinkage detection.
Figure 21.
Flow chart of wheel sinkage detection.
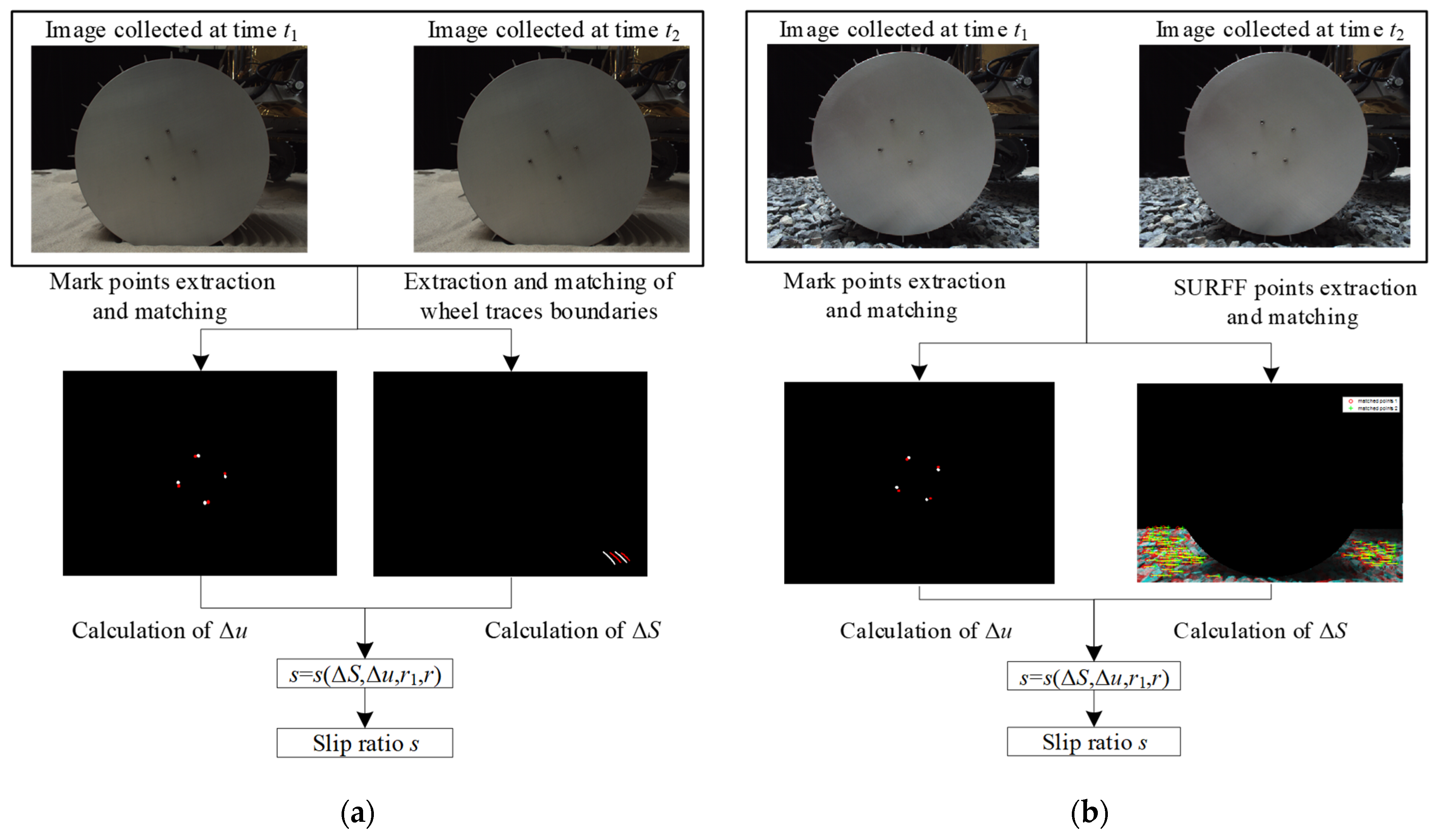
Figure 22.
Flow charts of wheel slip ratio detection, with (a) for the wheel traversing ST, and (b) for the wheel traversing GT/HT.
Figure 22.
Flow charts of wheel slip ratio detection, with (a) for the wheel traversing ST, and (b) for the wheel traversing GT/HT.
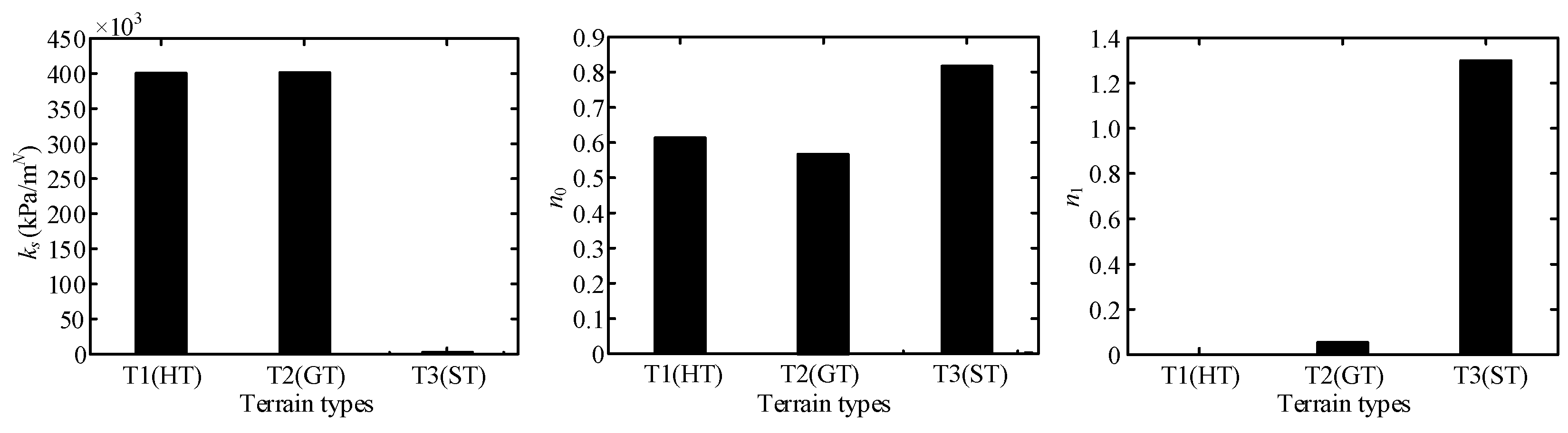
Figure 23.
Comparison of parameters ks, n0, and n1 for three terrains.
Figure 23.
Comparison of parameters ks, n0, and n1 for three terrains.
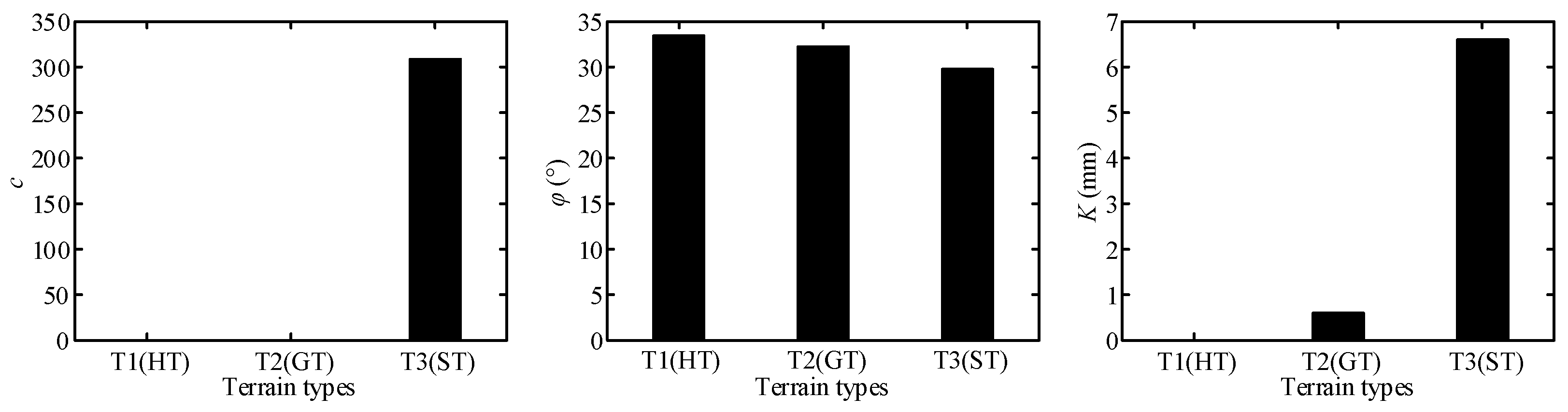
Figure 24.
Comparison of parameters c, φ, and K for three terrains.
Figure 24.
Comparison of parameters c, φ, and K for three terrains.
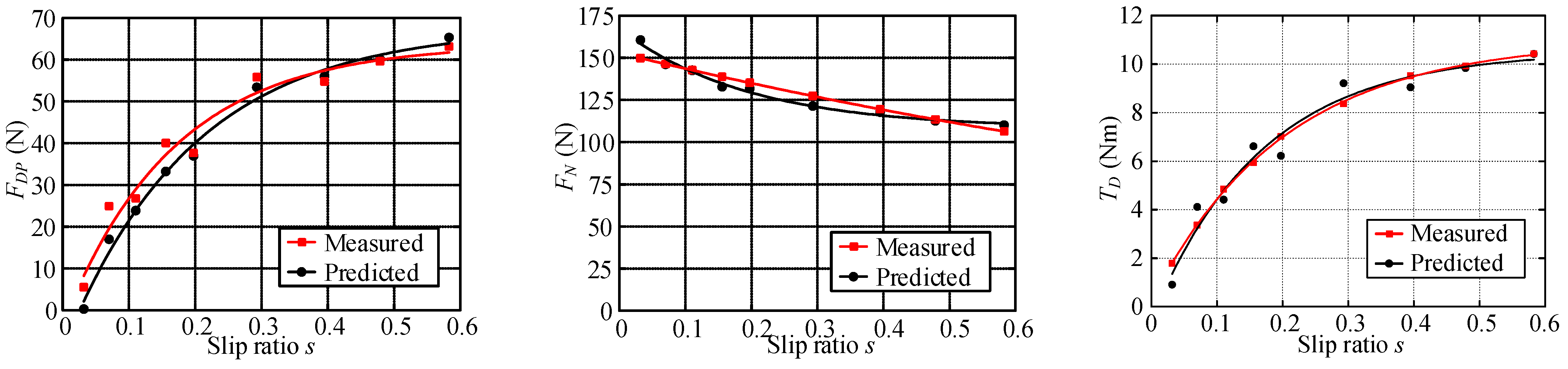
Figure 25.
Wheel–terrain interaction force for Planetary Rover Prototype traversing HT, with (a) s = 0–0.6, and (b) s = 0.05–0.6.
Figure 25.
Wheel–terrain interaction force for Planetary Rover Prototype traversing HT, with (a) s = 0–0.6, and (b) s = 0.05–0.6.
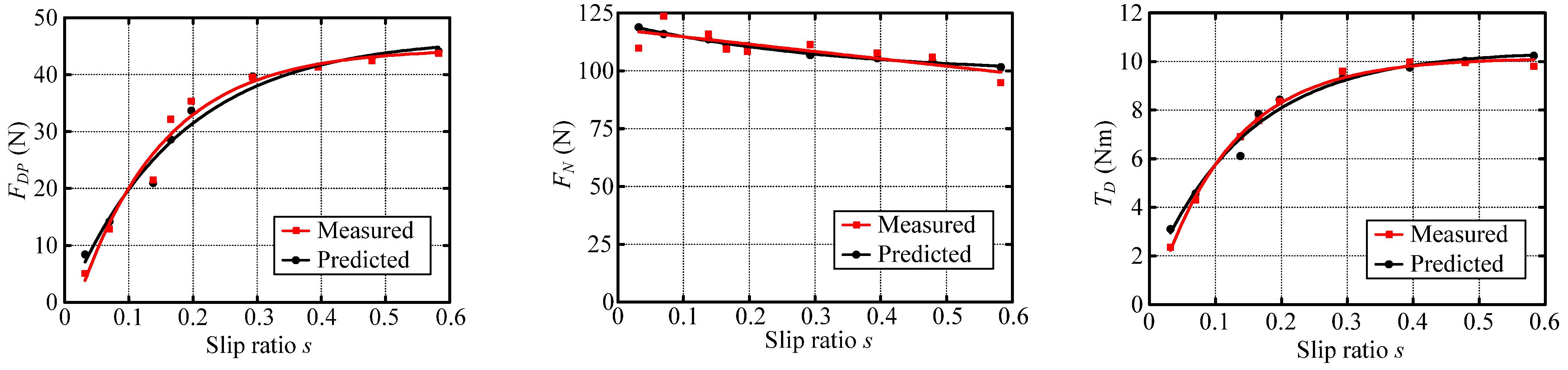
Figure 26.
Wheel–terrain interaction force for the Planetary Rover Prototype moving on GT.
Figure 26.
Wheel–terrain interaction force for the Planetary Rover Prototype moving on GT.
Figure 27.
Wheel–terrain interaction force for the Planetary Rover Prototype moving on ST.
Figure 27.
Wheel–terrain interaction force for the Planetary Rover Prototype moving on ST.
Table 1.
Correspondence between terrain classes and the WTICs.
Table 1.
Correspondence between terrain classes and the WTICs.
| Terrain Class | WTIC |
|---|
| T1 | all lugs contacting terrain surface (ALCT) |
| T2 | some lugs contacting terrain surface (SLCT) |
| T3 | lugs entering into soil (LEIS) |
Table 2.
The comparison of all vibration features for different WTICs.
Table 2.
The comparison of all vibration features for different WTICs.
| Vibration Features | WTIC |
|---|
| ALCT | SLCT | LEIS |
|---|
| p1 = lg(κf) | M | S | M |
| p2 = lg(κA) | M | B | S |
| p3 = lg(κmv) | MB | VB | MB |
| p4 = lg(κms) | M | VB | S |
| Feature vector {p1, p2, p3, p4} | {M, M, MB, M} | {S, B, VB, VB} | {M, S, MB, S} |
Table 3.
WTIC recognition results of 300 samples for the single-wheel test experiments.
Table 3.
WTIC recognition results of 300 samples for the single-wheel test experiments.
| Actual WTIC | Recognized WTIC |
|---|
| ALCT | SLCT | LEIS | UWTIC |
|---|
| ALCT (wheel–HT interaction) | 58 | 0 | 0 | 2 |
| SLCT (wheel–GT/HGT interaction) | 0 | 118 | 0 | 2 |
| LEIS (wheel–ST/SGT interaction) | 0 | 0 | 116 | 4 |
Table 4.
Correspondence between terrain class and setting values of terrain parameters for terramechanics model switching.
Table 4.
Correspondence between terrain class and setting values of terrain parameters for terramechanics model switching.
| WTIC | Terrain Parameters |
|---|
| Soil Cohesion c | Shearing Deformation Modulus K |
|---|
| ALCT | 0 | 0 |
| SLCT | 0 | Without setting value |
| LEIS | Without setting value | Without setting value |
Table 5.
WTIC recognition results for Planetary Rover Prototype test experiments.
Table 5.
WTIC recognition results for Planetary Rover Prototype test experiments.
| Actual WTIC | Recognized WTIC |
|---|
| ALCT | SLCT | LEIS | UWTIC |
|---|
| ALCT (wheel–HT interaction) | 133 | 0 | 0 | 11 |
| SLCT (wheel–GT/HGT interaction) | 0 | 134 | 0 | 10 |
| LEIS (wheel–ST/SGT interaction) | 0 | 0 | 144 | 0 |
Table 6.
Results of terrain parameter identification for Planetary Rover Prototype test experiments.
Table 6.
Results of terrain parameter identification for Planetary Rover Prototype test experiments.
| Terrain | c1 | c2 | Ks (KPa/mN) | n0 | n1 | c (KPa) | φ (°) | K (mm) |
|---|
| T1 (HT) | 0.8069 | 0 | 3.9999 × 105 | 0.6104 | 0.000 | 0 | 33.34 | 0 |
| T2 (GT) | 0 | 0 | 4.0053 × 105 | 0.5680 | 0.054 | 0 | 32.17 | 0.6 |
| T3 (ST) | 0.4424 | −0.6379 | 2.4904 × 103 | 0.8169 | 1.296 | 308.6 | 29.67 | 6.6 |
Table 7.
Relative error of data fitting for FDP, W, and TD.
Table 7.
Relative error of data fitting for FDP, W, and TD.

 ,
, 



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}