1. Introduction
In the management of aircraft, UAVs and other airborne systems, the measurement of three-dimensional positioning information of aircraft is important, and research and development of various techniques has been carried out. The most popular method is satellite positioning. An Automatic Dependent Surveillance–Broadcast (ADS-B) [
1] signal, which is based on GPS technology, is transmitted from almost all civilian aircraft, and the information contained therein is governed by regulations. Furthermore, many airfields are equipped with equipment for radar observation such as Airport Surveillance Radar (ASR) [
2], which is used to determine the positions of aircraft that do not transmit an ADS-B signal. The majority of these positioning technologies are based on the principles of 3D position measurement based on detecting the response from an object to a signal transmitted from an antenna. We have regularly been conducting simulations of aircraft noise [
3]. For these simulations, it is required to identify the aircraft’s position at relatively lower altitudes below 1000 ft, while measuring frequency characteristics of the aircraft sound. In such a case, if the accuracy of measuring flight altitude is coarse, the precision of the predicted acoustic characteristics related to the flight increases. Therefore, a more accurate technique for estimating flight positions at lower altitude is needed. However, it is difficult to use radar information due to the presence of undetectable aircraft types, the effects of reflections and obstructions from buildings, and issues related to information confidentiality. Furthermore, GPS technologies, including ADSB, are not satisfactory due to the presence of aircraft that do not emit their signals and challenges with quantization errors [
4] in GPS altitude measurements. Consequently, an alternative method for estimating flight paths using optical techniques can be effectively adopted.
There has been extensive research on the use of video data captured from the ground for detection of aircraft, and much of this prior work was conducted on themes related to practical application of UAVs in particular. For example, Davies et al. investigated the effectiveness of a Kalman filter for detecting very small aircraft in low-contrast images [
5]. Furthermore, Rozantsev et al. successfully detected very small aircraft from images acquired with moving cameras by using computer vision [
6]. Doyle et al. developed a system capable of real-time tracking of drones by using a combination of computer vision with pan/tilt technology [
7], and Kashiyama et al. have been actively investigating the inference of UAV flight paths by applying cutting-edge technology [
8]. These studies have generally investigated detection of aircraft by unique algorithms using video from fixed-focal-point cameras, and we also use these detection methods as a reference. In addition, Kang & Woolsey researched flight path detection by stereoscopic measurement methods using two fish-eye cameras [
9]. In contrast, the method in the present paper greatly differs in the sense that it aims to acquire the 3D coordinates of aircraft in accordance with surveying theory. Moreover, the determination of 3D flight paths over a wider range of actual aircraft has not been confirmed in comparison with existing technology, even in case studies. Research into outdoor ground-to-air aircraft detection can therefore be said to have high novelty. Research that captures video of the sky by using a fish-eye camera, unrelated to aircraft, is often found in the field of meteorology. In this research, solar irradiation and other parameters. are inferred from captured sky images [
10,
11].
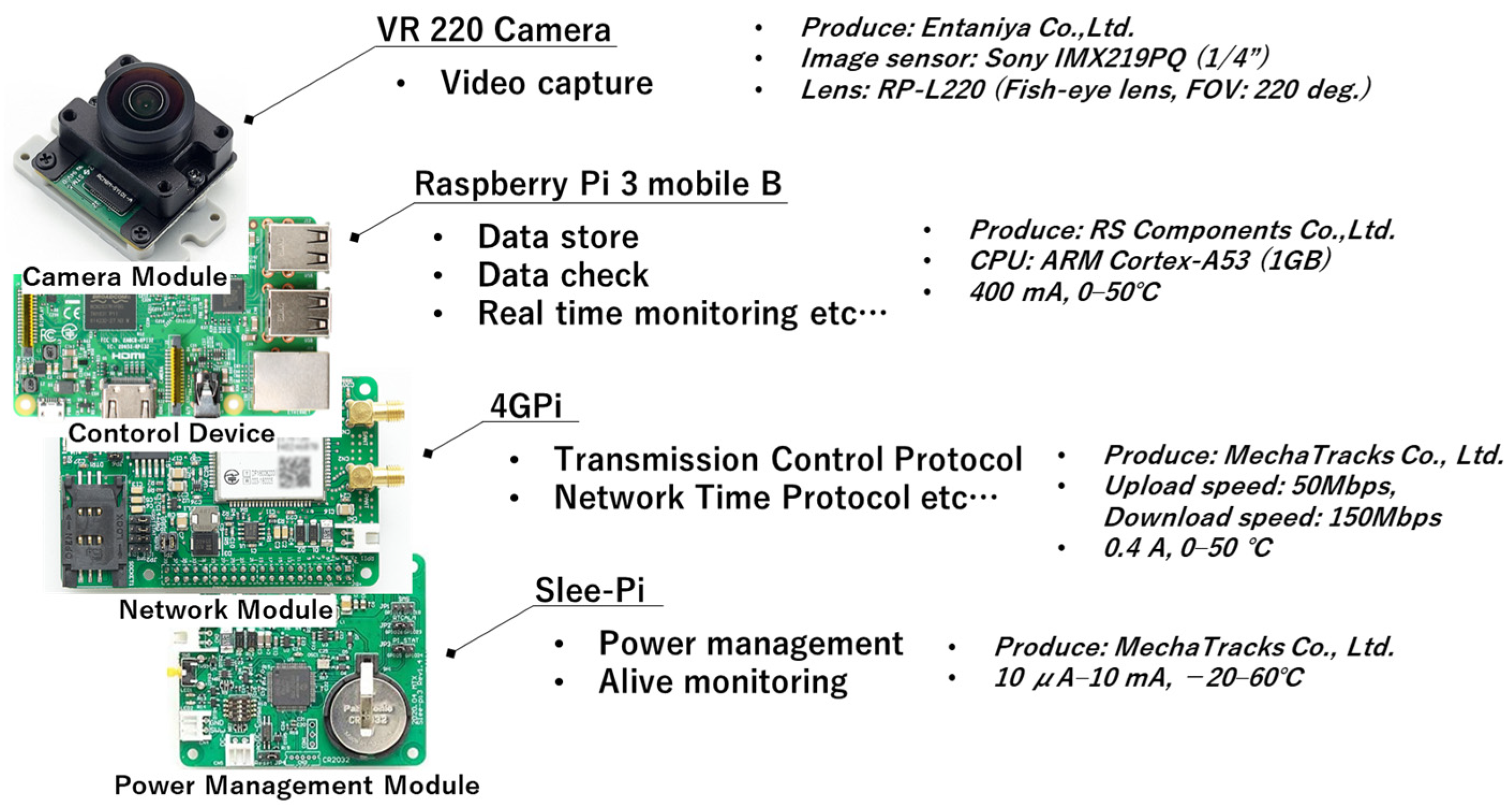
We therefore developed an aircraft positioning camera (APC) that is based on low-cost, portable Internet of Things (IoT) devices equipped with a fish-eye camera and that can mechanically measure the three-dimensional position of aircraft in a local region [
12]. We are now conducting research to confirm the capabilities of the APC. The remainder of this paper is organized as follows.
Section 2 introduces the specifications of the APC, and
Section 3 gives the details of the algorithms used for analysis.
Section 4 discusses the fundamental calibration experiments, and
Section 5 presents a case study for confirming its flight path measurement capabilities.
Section 6 includes further discussion including limitations, and finally,
Section 7 concludes the paper.
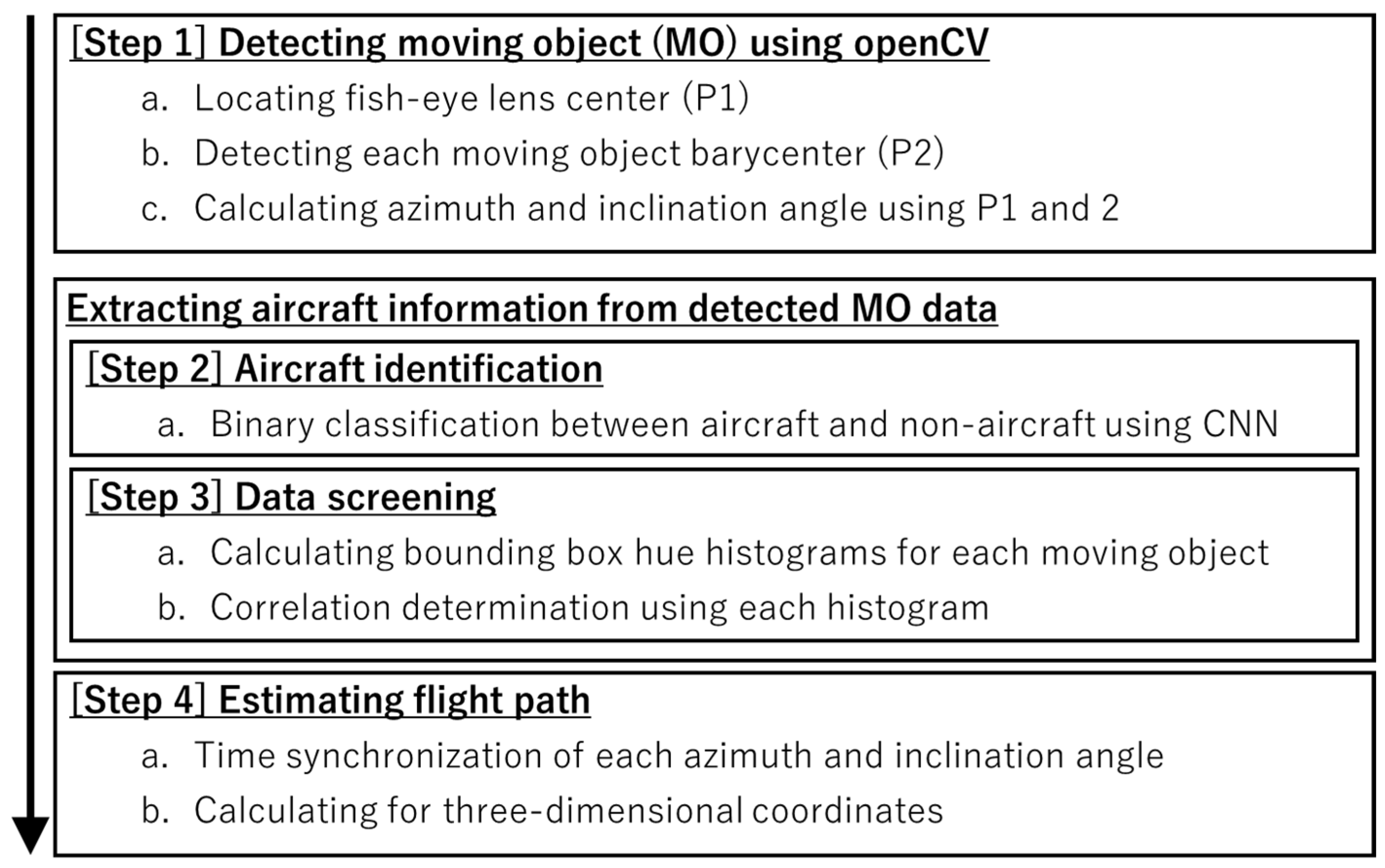
3. Algorithm for Estimating Flight Path
Figure 3 shows a flowchart of the analysis algorithm for flight path inference in this study. Methods that employ YOLO [
13] for this kind of moving object (MO) identification have become mainstream in recent years, and our system can potentially also be migrated to this method in the future. As shown in
Figure 3, a conventional method based on MO detection and a convolutional neural network (CNN) [
14] was used to perform post facto analysis of the video captured at each site. First, MO detection of barycenter pixels of all MOs captured in the video at each site was performed using openCV [
15], and the values of the azimuth angle and angle of elevation of the MO at each time were calculated from the coordinates and center of the fish-eye lens (Step 1). Although the sky occupies most of the image when the sky is filmed using a fish-eye lens, the ground is also captured around the edges of the lens because the field of view is wide. Because of this, the MOs from MO detection are not limited to flying objects such as aircraft, birds and insects. MOs are also detected on the ground, such as people, cars and trees, and these constitute noise that obscures the information about the aircraft. To extract aircraft information from the data, aircraft identification is performed by CNN (Step 2), and processing combines this with data screening based on this identification result (Step 3). In Step 4, the extracted continuous values of the angle of each aircraft at each site are time synchronized, and the coordinates are calculated by the method of forward intersection from surveying [
16] based on this angle information and the coordinates of each measurement site. The details of the processing method in each step are described below.
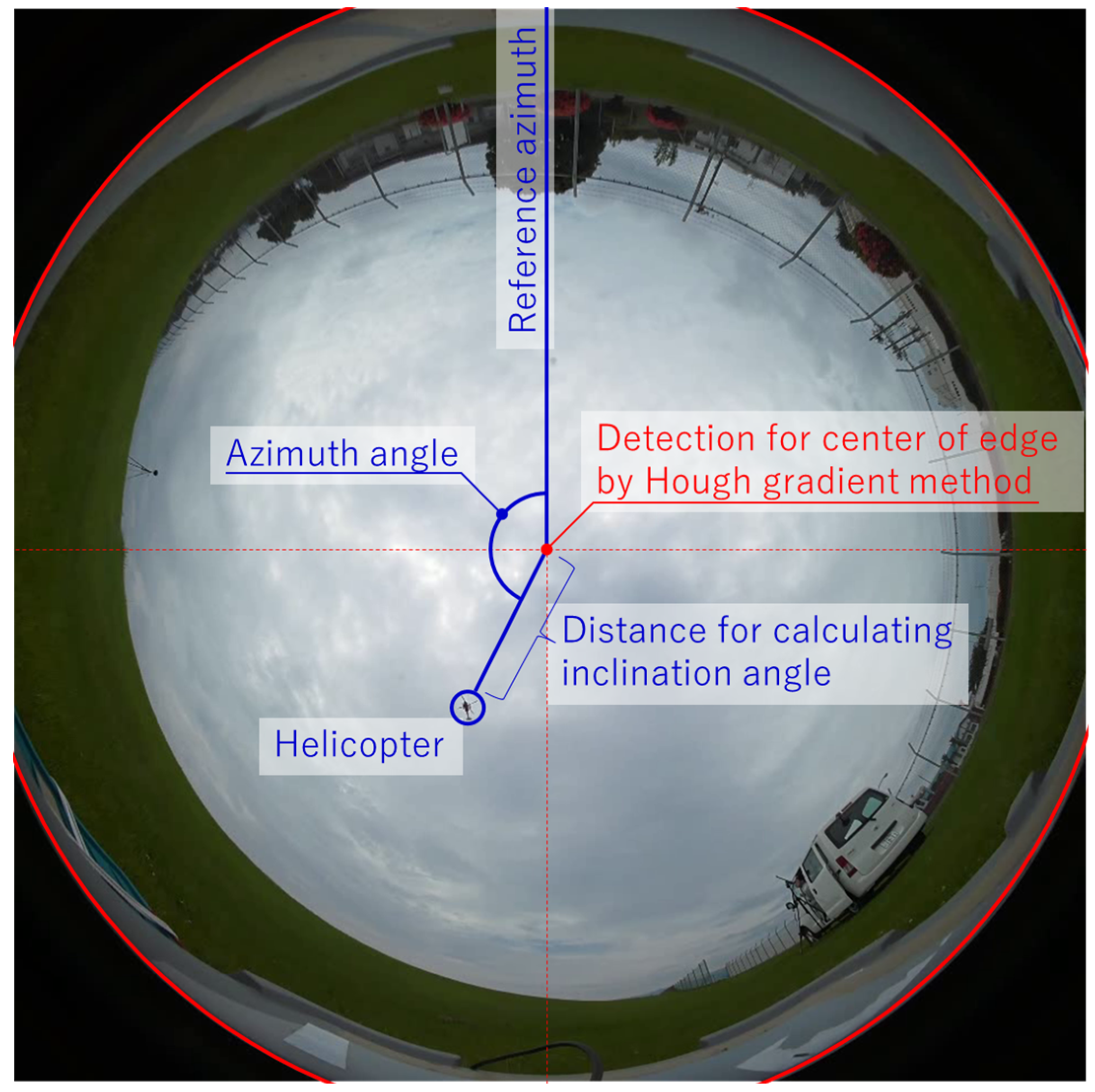
3.1. MO Detection Using openCV (Step 1)
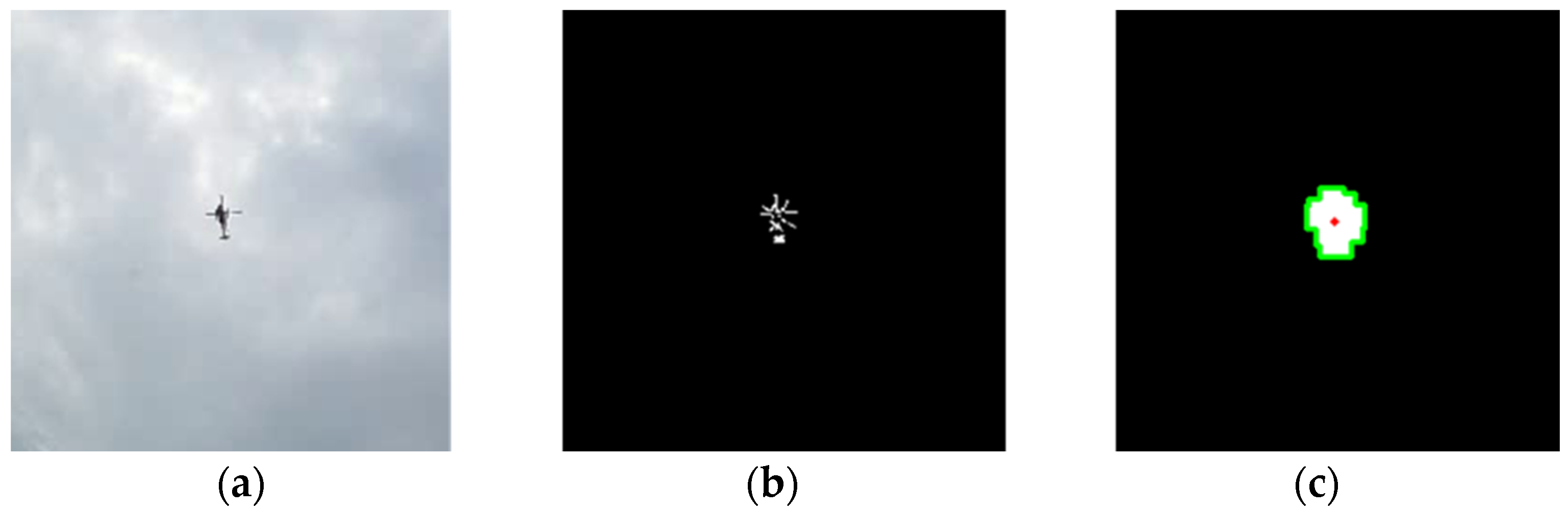
Figure 4 shows an image of the calculation of the azimuth angle and angle of inclination from the fish-eye camera images, and
Figure 5 shows example frames of each analysis step in MO detection. This analysis method is based on the idea of inferring the inclination angle from the distance between the center coordinate of the circle of the fish-eye lens and the barycenter coordinates of the MO, and the azimuth angle from the angle formed by these two coordinates and the reference azimuth (in this study, the upward direction in the image of the system). The center coordinate is detected by Hough transformation of the center of the fish-eye lens captured in the image (red lines in
Figure 4). The barycenter coordinate is calculated by using a simple MO detection technique. More specifically, the difference between consecutive frames is calculated by the frame difference method, and the difference image is converted to grayscale and then binarized (middle panel in
Figure 5). This binarized image is composed of a set of many minuscule points (white is MO, black is not MO), and the white parts must be joined to be recognized as a region. Because of this, the discontinuous white regions are joined by applying the values of the white pixels to the surrounding black regions by expansion processing. The silhouette of the MO region is detected from the image, and finally the pixel coordinates of the barycenter of that silhouette are defined as the position of the MO (right panel in
Figure 5).
The azimuth angle
and inclination angle
are calculated by the following equations based on the center (
Fx,
Fy) of the fish-eye lens as calculated by the above method and the barycenter coordinates (
Ox,
Oy) of the MO:
where
pave is a ratio obtained from calibration experiments described below for converting the distance between pixels into an angle.
3.2. Extracting Aircraft Information from Detected MO Data
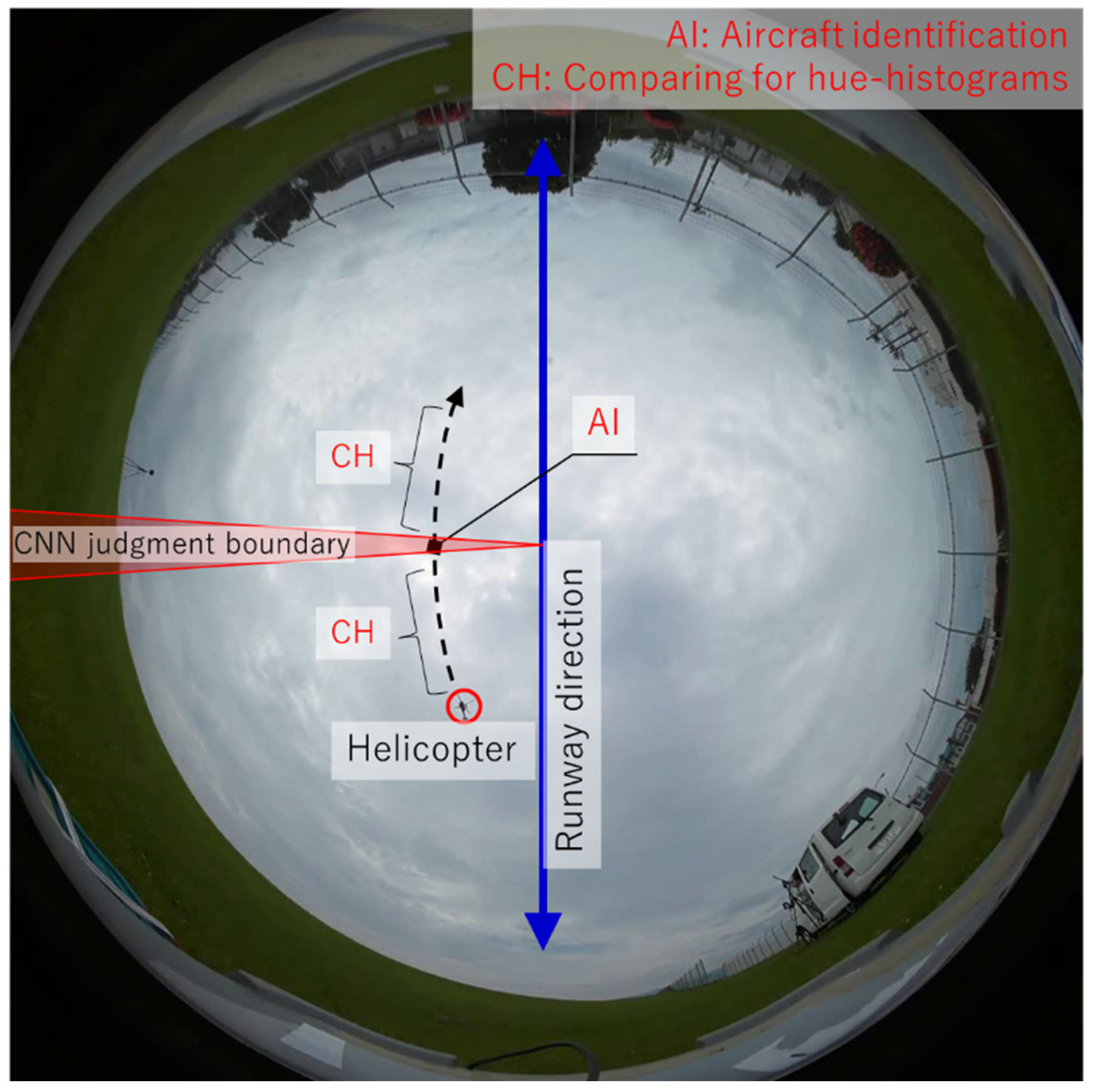
Figure 6 shows an image for the extraction of aircraft information from data calculated by the above MO detection. In cases such as urban areas and green areas where the video captured by the APC can easily capture MO other than aircraft, the amount of MO information analyzed in Step 1 increases greatly. When mechanical processing is performed on this kind of MO data, the processing time also increases proportionally. In this study, the measurement target is aircraft flying at low altitude near airfields, and these aircraft regularly fly along a path in the runway direction (blue line in
Figure 6). In this study, boundary lines (red lines in
Figure 6) through which the aircraft always pass were set on the camera lens, and a CNN was used to perform binary classification limited to MOs that pass through this region. The classification of aircraft outside this range and other MOs is determined by calculating the correlations of the hue histograms for each MO at each moment.
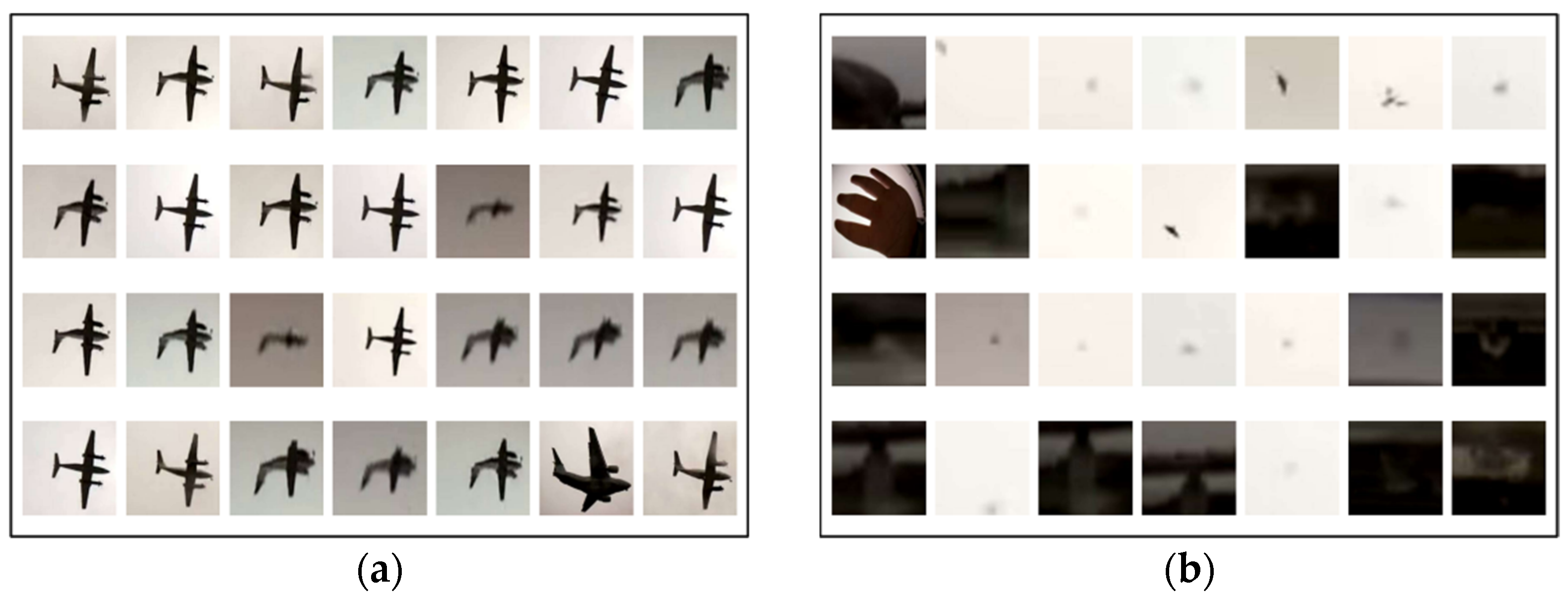
In the binary classification of aircraft and other MOs using a CNN, bounding box images of the MO detected at the same time as the MO detection calculation are used as training data.
Figure 7 shows an example image of a training dataset. For the video for obtaining the training data, data captured in advance by the APC on a different day in the experiment were used in the case study described below. For classification annotations, all images are classified by visual determination as “aircraft” or “other” in the analyzed bounding box images. The aircraft set (left side in
Figure 7) contains multiple aircraft types including jet planes, propeller planes and helicopters, and the non-aircraft set (right side in
Figure 7) contains MOs such as people, birds, insects, trees and vehicles. In each category, 1000 images were used for training.
Table 2 shows the setting items for training the CNN. In this study, PyTorch [
17] was used as the framework, and after the ResNet-18 structure [
18] and weightings of the trained model were loaded by following the tutorial, it was trained using the above dataset. Parameters such as loss coefficients and activation coefficients were set to default values.
To investigate the performance of binary classification using this CNN, classification was performed on 3200 unknown measured images that were not contained in the training data (1600 in each category).
Table 3 shows the confusion matrix of the results. The vertical direction shows the prediction results and the horizontal direction shows the classification results. The overall accuracy as shown at the bottom right was 86.7%. However, if we look at the aircraft column for the predicted label, this model had an accuracy of 99.9% for aircraft prediction, with almost no misidentifications. This high accuracy was obtained because the MO is clear when a low-altitude flying MO near a runway is captured by the APC, as shown in
Figure 7. These conditions make it easy to distinguish aircraft MOs from non-aircraft MOs. The subsequent data screening was performed based on the judgment results from this model.
3.3. Data Screening (Step 3)
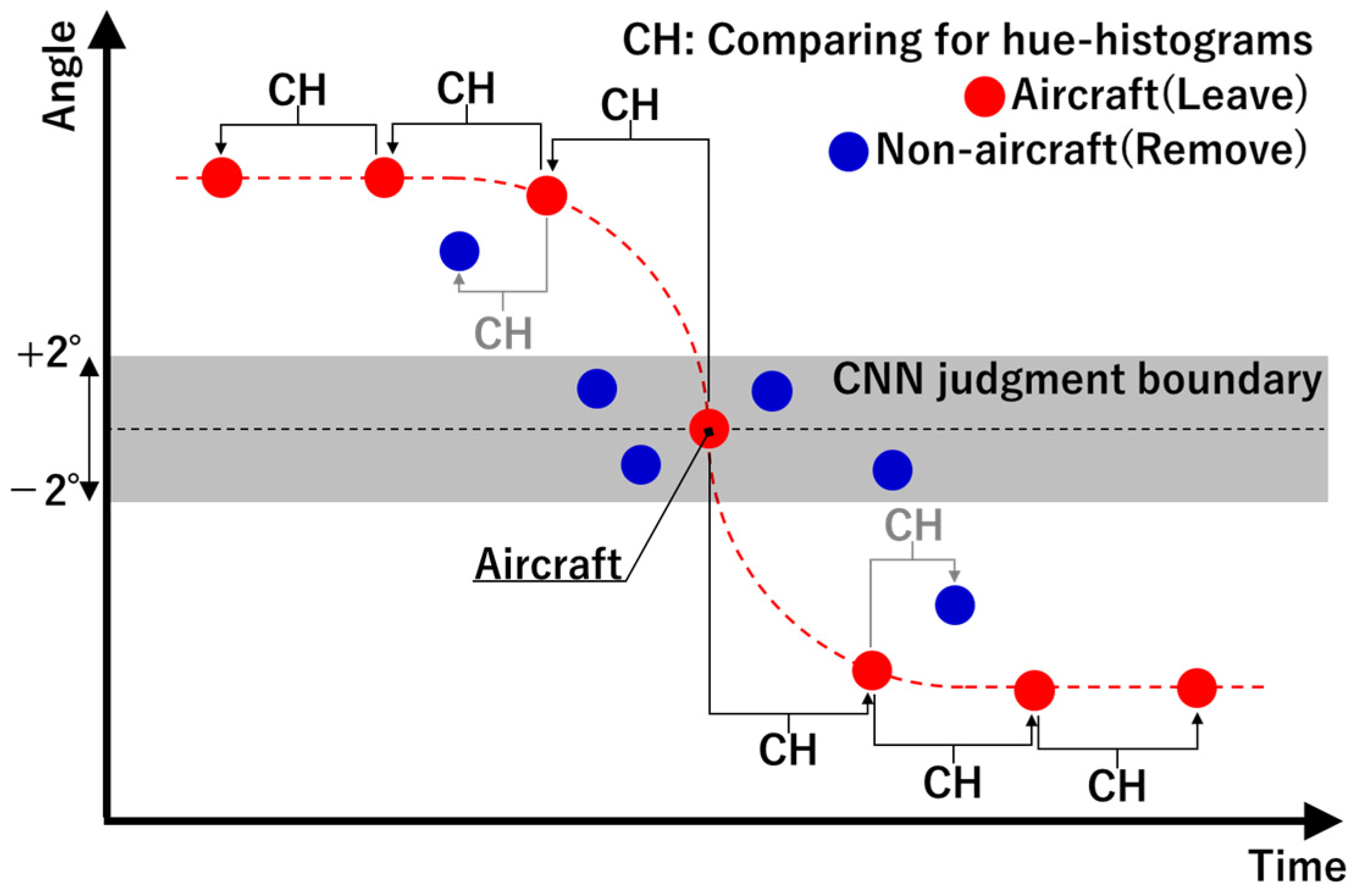
Figure 8 shows an image of the data screening based on judgment results from the CNN. First, a range of ±2° was set as the CNN judgment boundary, and binary classification by the CNN was performed on the bounding box images of MOs passing through this region. In this way, hue histograms were obtained for the bounding box images of MOs judged to be aircraft in the range of the boundaries, and the correlation coefficient was calculated between temporally adjacent MOs. If this correlation coefficient exceeds a threshold, the MO is judged to be an aircraft; otherwise, it is a non-aircraft. Then, screening is performed on only the aircraft information from among the MO information in the entire region by repeatedly performing this processing over time while updating the original histogram information. In this study, a correlation coefficient of ≥0.85 and a time interval of ≤2 s were set as the threshold for the correlation coefficient for judgment.
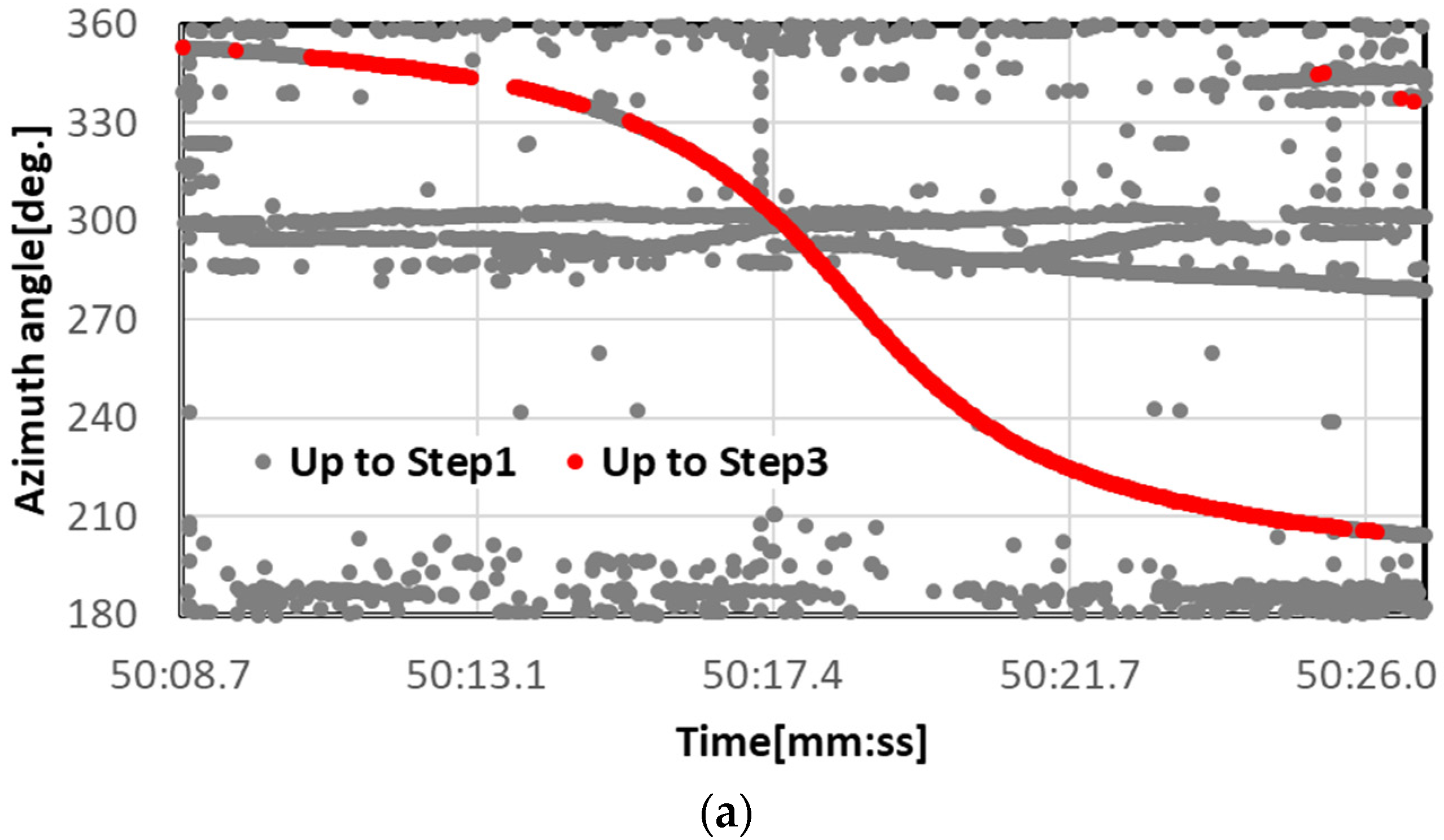
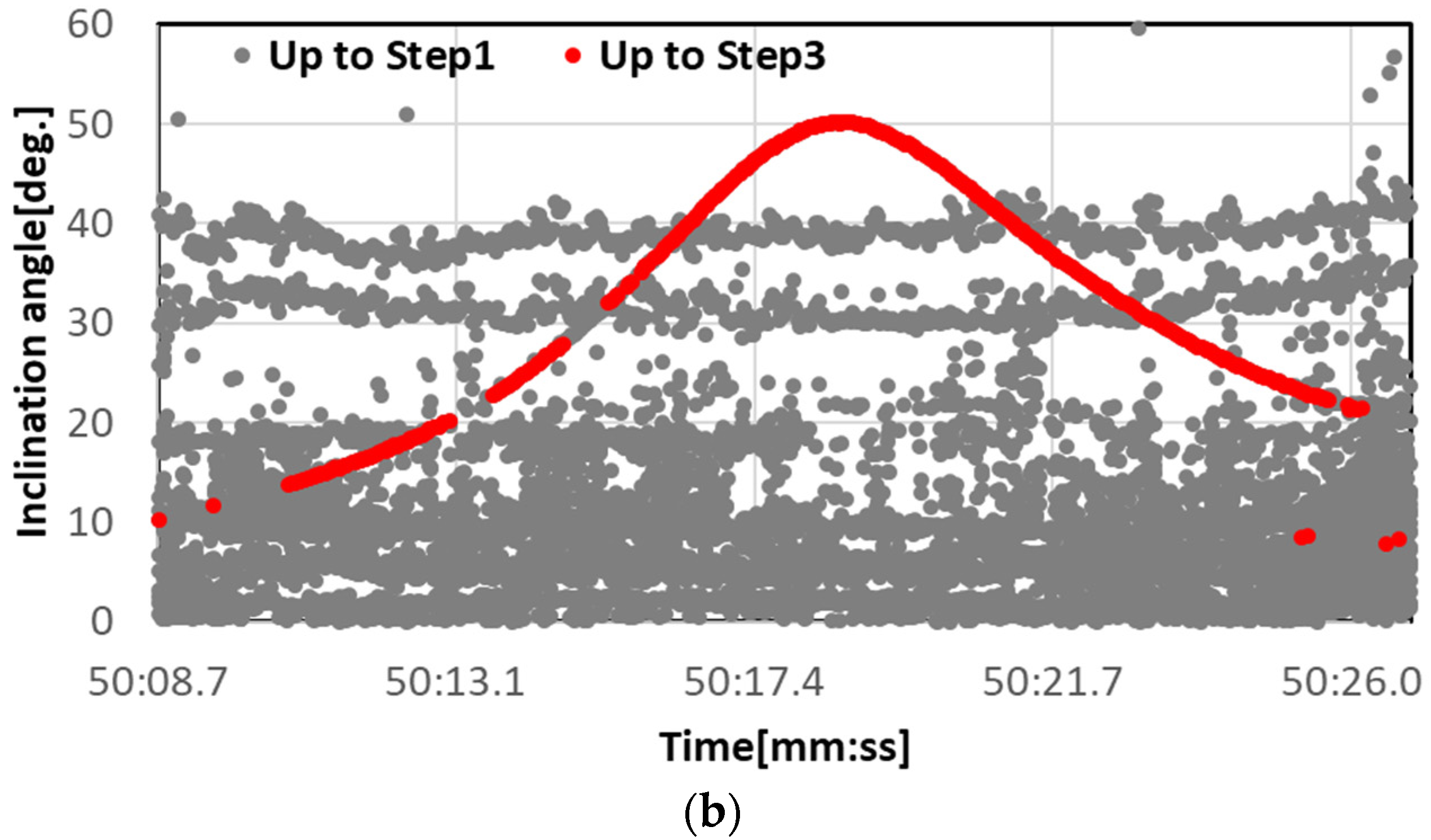
Figure 9 shows an example of the results of extracting the aircraft information by using Steps 2 and 3. In this example, although there were several outliers at low inclination angles in the right side of the figure, extremely clean angle variation properties appeared outside this angle range. The outliers at low inclination angle are thought to be due to the effect of the increasing inclusion of non-aircraft MOs in the hue histogram judgment.
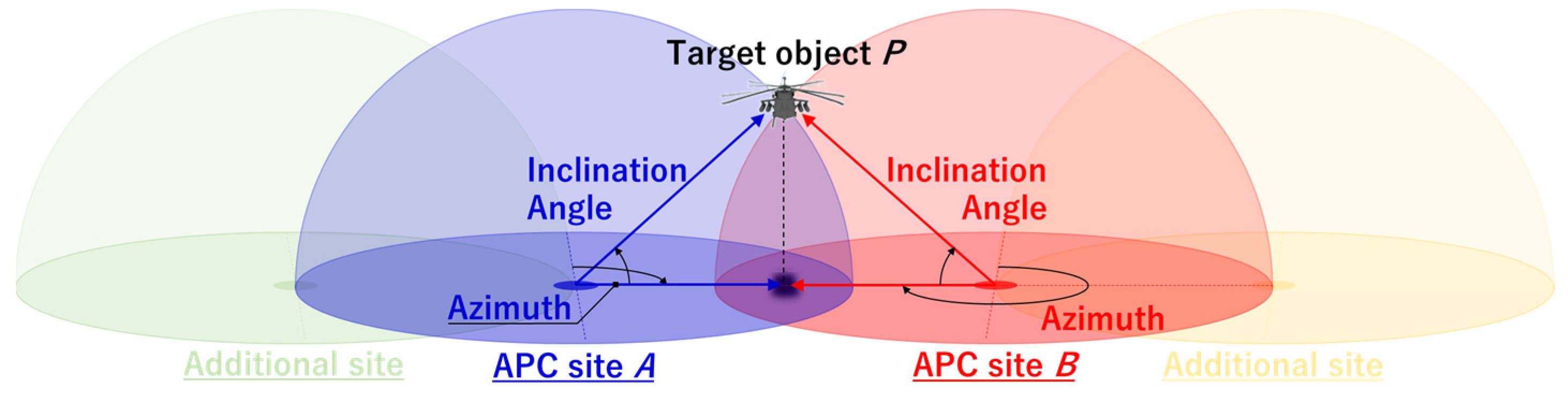
3.4. Estimation of Flight Position
If the time-continuous values of azimuth angle (
θA,
θB) and inclination angle (
φA,
φB) up to Step 3 can be extracted at site A (
Ax,
Ay,
Az) and site B (
Bx,
By,
Bz) around a flying aircraft
P as shown in
Figure 1, then the three-dimensional flying position (
Px,
Py,
Pz) of the aircraft can be calculated using the following equations:
where
,
,
, and
is the horizontal distance between site A and the aircraft. Note that since
m1 and
m2 diverge due to the
tan calculation when the azimuth angle at both sites is 90° or 270°, the following measure to prevent this was taken in this study:
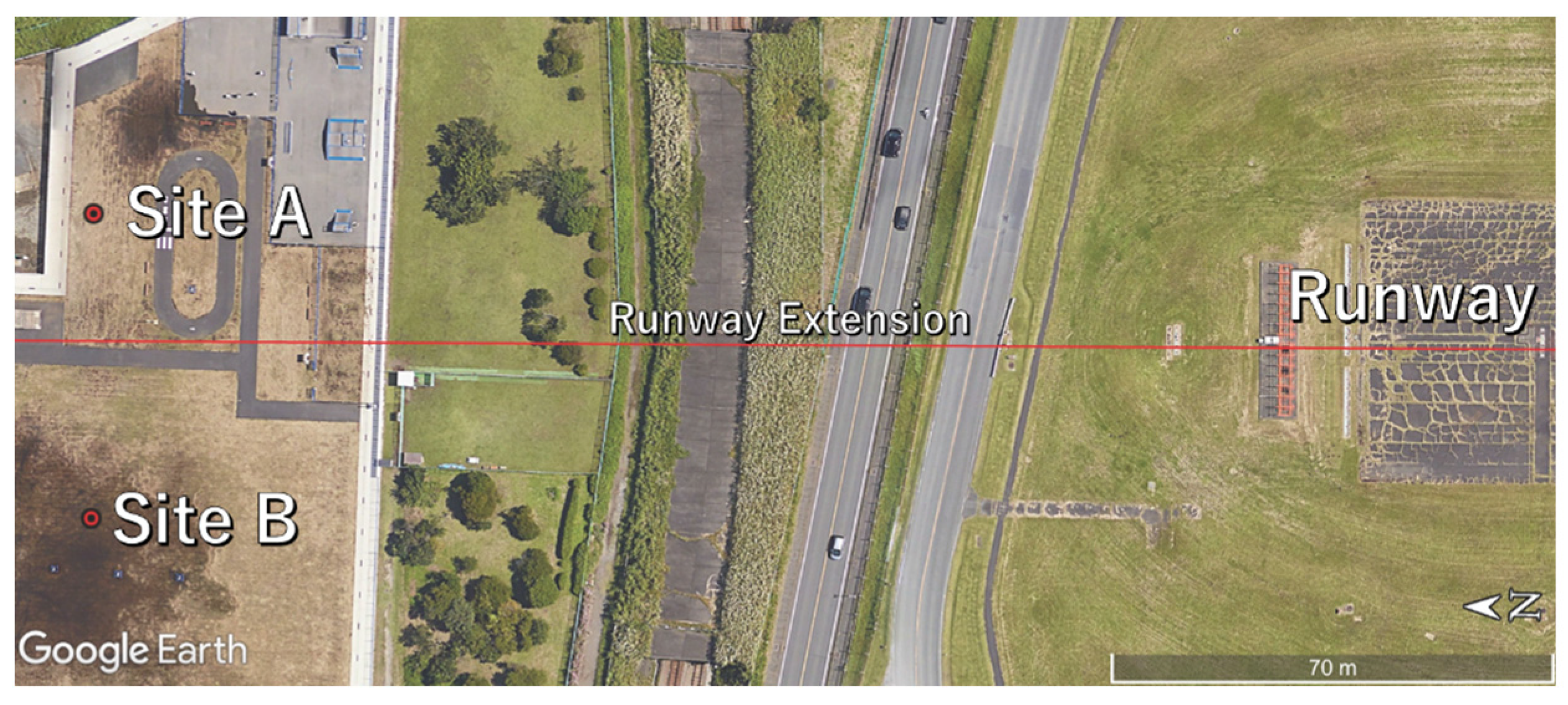
To perform the above calculations, it is necessary to synchronize the azimuth and inclination angles obtained at each location of Sites A and B. In this study, these data were synchronized by using the Network Time Protocol time information measured at each site.
6. Discussion and Limitations
This study showed that APC can infer the local path of a flying aircraft, similar to existing technology, but many issues remain that need to be investigated. We are planning further research themes using this system. The details are described below.
The issues that require investigation include (1) the policy for setting each of the parameters in MO detection; (2) the effects of errors during installation; (3) the detection limit; (4) comparisons with previous research; and (5) investigation of the effects of weather and other factors.
For issue 1, the first parameters are the setting values for MO detection in openCV in the APC in this study, which were adjusted empirically in this work. These parameters will need to be changed depending on the equipment used, the types of MO targeted, and effects of factors such as the video capture environment. As a result, the policy for sophisticated setting of the parameters under various conditions needs to be investigated.
Regarding issue 2, error during installation included misalignment when the APC was installed at the site, with parameters such as the tilt adjusted manually in this study. The size of the effect that this installation error has on the output results needs to be confirmed. Depending on the situation, a mechanism for digital error correction also needs to be considered.
With respect to issue 3, the detection limit is the range that can be captured by the APC, and in the results of the case study in this report, detection was within a range of around 500 m. However, we envision that this range will vary depending on conditions such as the type of aircraft, contrast with the background, and speed of the aircraft. As a result, it is desirable to accurately investigate the measurement thresholds for MO detection under various flight parameters.
To address issue 4, comparisons should be made with the previous research listed in
Section 1. For a given type of airborne MO, it is desirable to rigorously confirm the differences in performance between the cases of using fixed-focus-point cameras, fish-eye lens stereo cameras and the present APC.
For issue 5, the weather conditions during video capture need to be considered. In the present case study, the path in
Figure 14 was obtained under cloudy conditions as shown in
Figure 13. However, there is a high possibility that tracking by camera is not possible in cases including precipitation, low thick clouds, bright sunlight and nighttime. Knowing these detection limits is also important in terms of metrology, and some method that enables the inference of paths during bad weather by digital processing would also be desirable to investigate.
Further research themes that are planned are as follows: (1) dynamic laboratory experiments employing computer graphics and three-dimensional video capture technology; (2) the ability to measure source emission power; and (3) applications such as surveys counting the number of flights.
The laboratory experiments in research theme 1 are envisioned to target markers that are actually moving, unlike the static calibration experiments shown in
Section 4. In the envisioned experiment, computer graphic video with an arbitrarily created moving MO will be projected onto a 3D dome by employing computer graphics and 3D projection technology, and the MO will be captured on video by the camera. If such a virtual experimental method is effective, it will make it possible to investigate issues 1 to 4 as described earlier, and to conduct rigorous investigation by changing the size, speed and contrast with the background of the target MOs. This would also allow investigation of misalignment during installation and the effect of the type of camera.
Measurement of source emission power in research theme 2 means simultaneously measuring the acoustic power of noise emitted at every instant at the position of the aircraft, and this information will become important data for preparing noise maps for evaluating the impacts of aircraft noise. A method of noise measurement based on mutual correlation methods employing multichannel microphones [
20] is conventionally used but requires large equipment and high costs. If the same measurement can be performed with the APC, it would have the advantages not only of convenience, but also the ability to easily identify the types of aircraft from video, in contrast to sound measurements.
Surveys counting the number of flights in research theme 3 above would entail measurement of operating performance such as active times of aircraft arriving at and departing from an airfield, operational directions, flight modes and flight paths, and these data are considered important when preparing noise maps. Since the majority of civilian aircraft transmit the ADS-B signal, it is easy to determine their total number of flights. However, military aircraft often do not transmit this signal, so technology for observing the number of active aircraft is needed in addition to ADS-B. It is thought that the APC can be applied effectively as one of these methods.
7. Conclusions
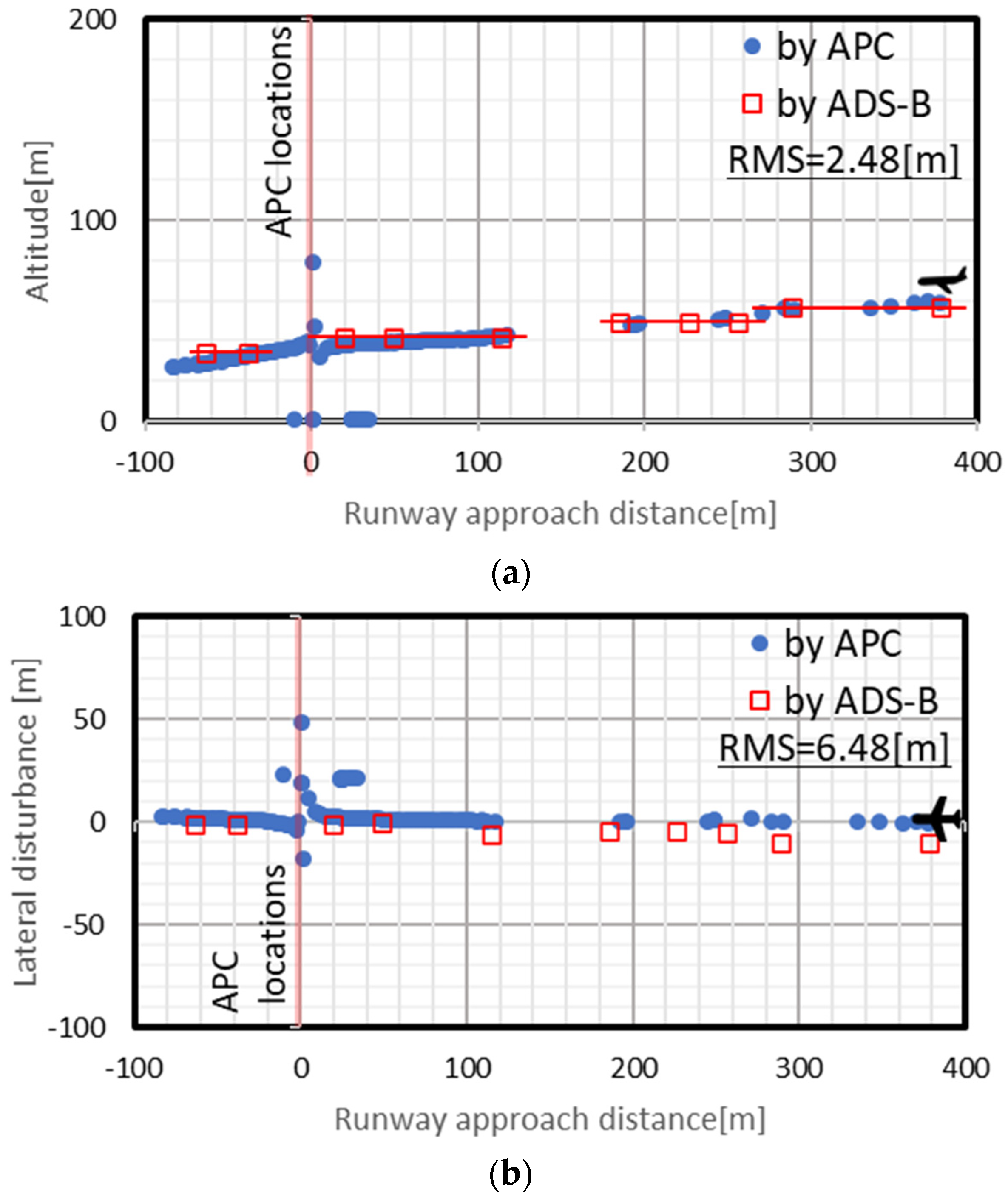
In the management of aircraft, UAVs and other airborne systems, measurement of three-dimensional position information of aircraft is important. Against a backdrop where research and development of various technologies has been carried out, we developed an APC that is based on IoT devices equipped with a low-cost, portable fish-eye camera and can mechanically measure the three-dimensional position of aircraft in a local region. This paper introduced the specifications of this APC, the details of the algorithms used for analysis, fundamental static calibration experiments and a case study for confirming its flight path measurement capabilities. The three-dimensional flight paths of aircraft in the situations of takeoff and landing were measured by the two methods of APC and ADS-B. Although the paths obtained by each of the methods had individual characteristics, the RMS values of the three-dimensional coordinates measured by the present method indicated only a minor discrepancy of 2.48 m for the vertical profile and 6.48 m for the horizontal plane. This fact indicates that the APC method enables detailed position measurements at relatively lower altitudes, which was difficult to measure with existing technologies such as radar and ADS-B.
By applying the technology of N-view triangulation [
21], the APC method presented in this study has the potential to increase the measurement accuracy. In future work, the current method can be expanded to become more accurate by increasing the number of reference points.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}