
Design and Implementation of a Prototype Seismogeodetic System for Tectonic Monitoring †

 ,
,  , , , , , and
, , , , , and
Abstract
:1. Introduction
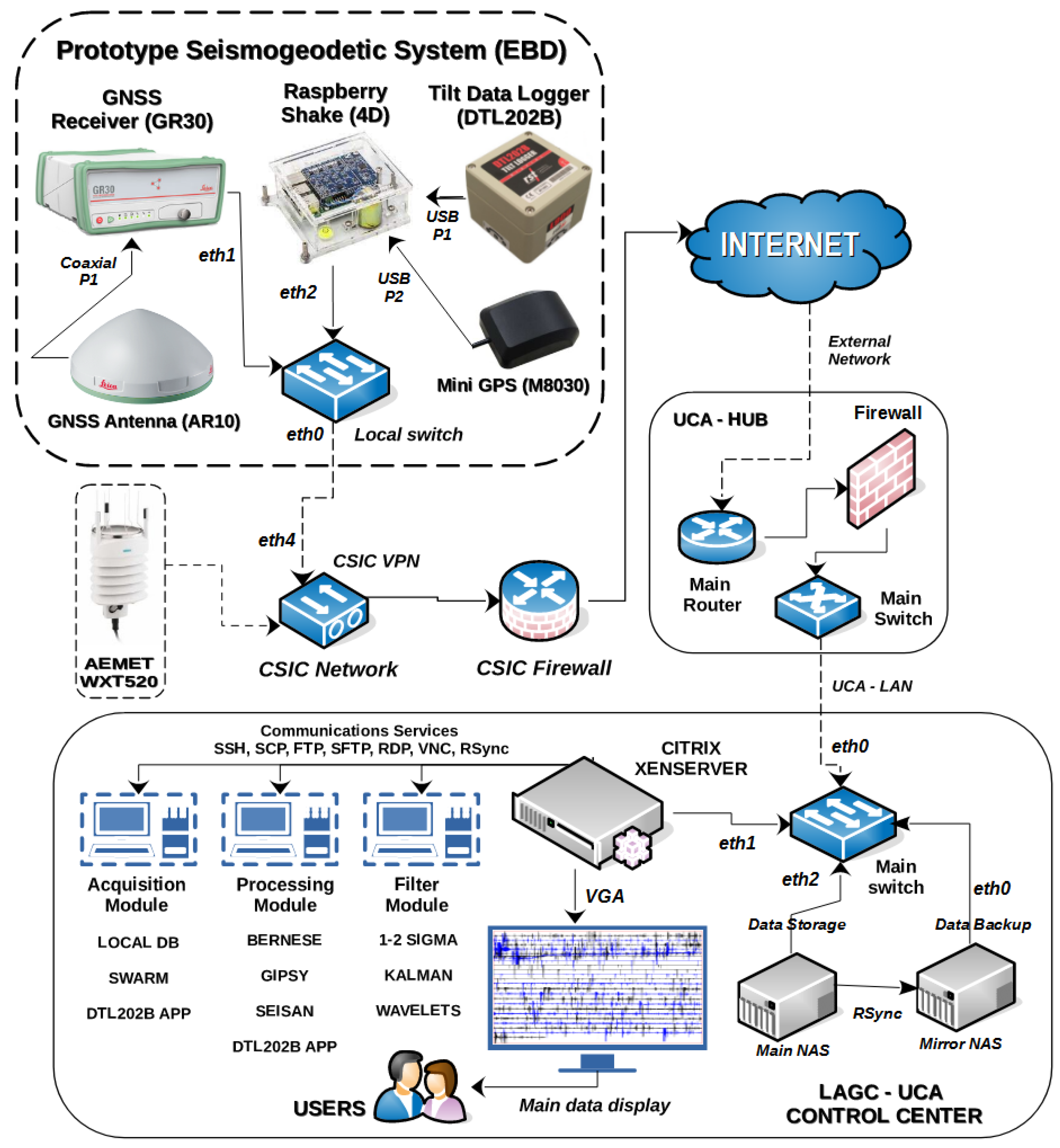
2. Design of the Prototype Seismogeodetic System
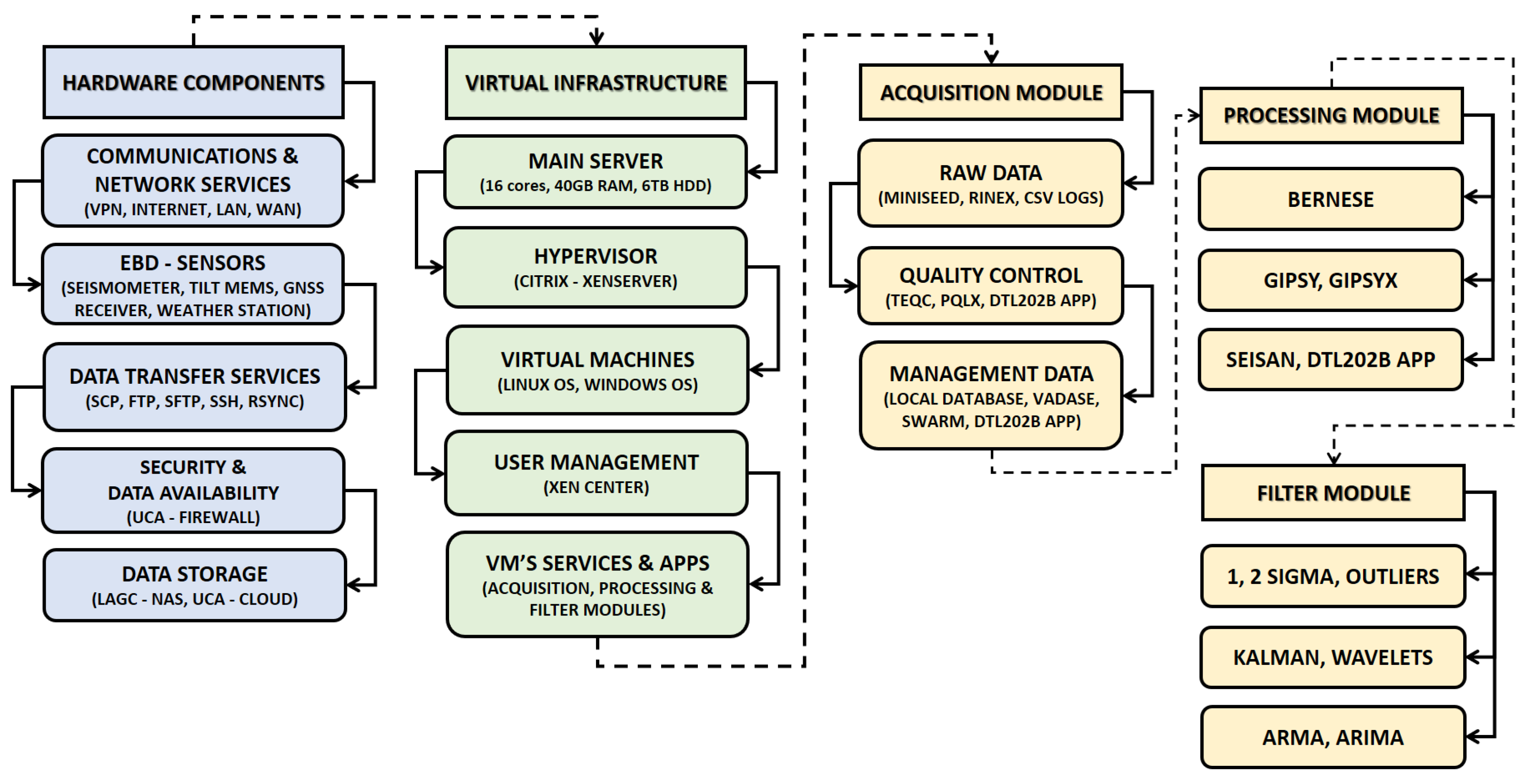
2.1. Deployed Software Applications
2.1.1. Acquisition Module
2.1.2. Processing Module
2.1.3. Filtering Module
3. Data Management and Processing Techniques
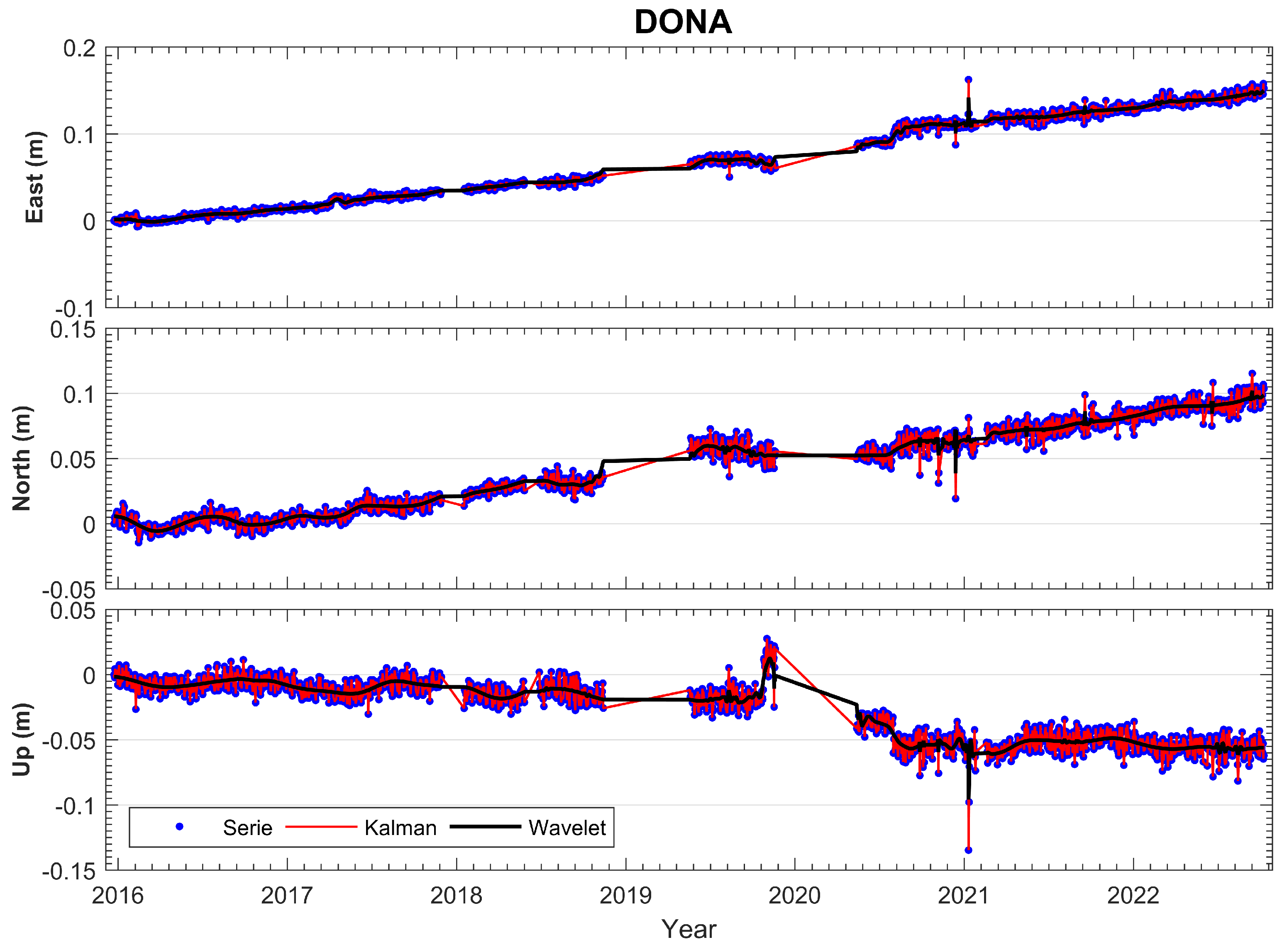
3.1. GNSS Data Processing
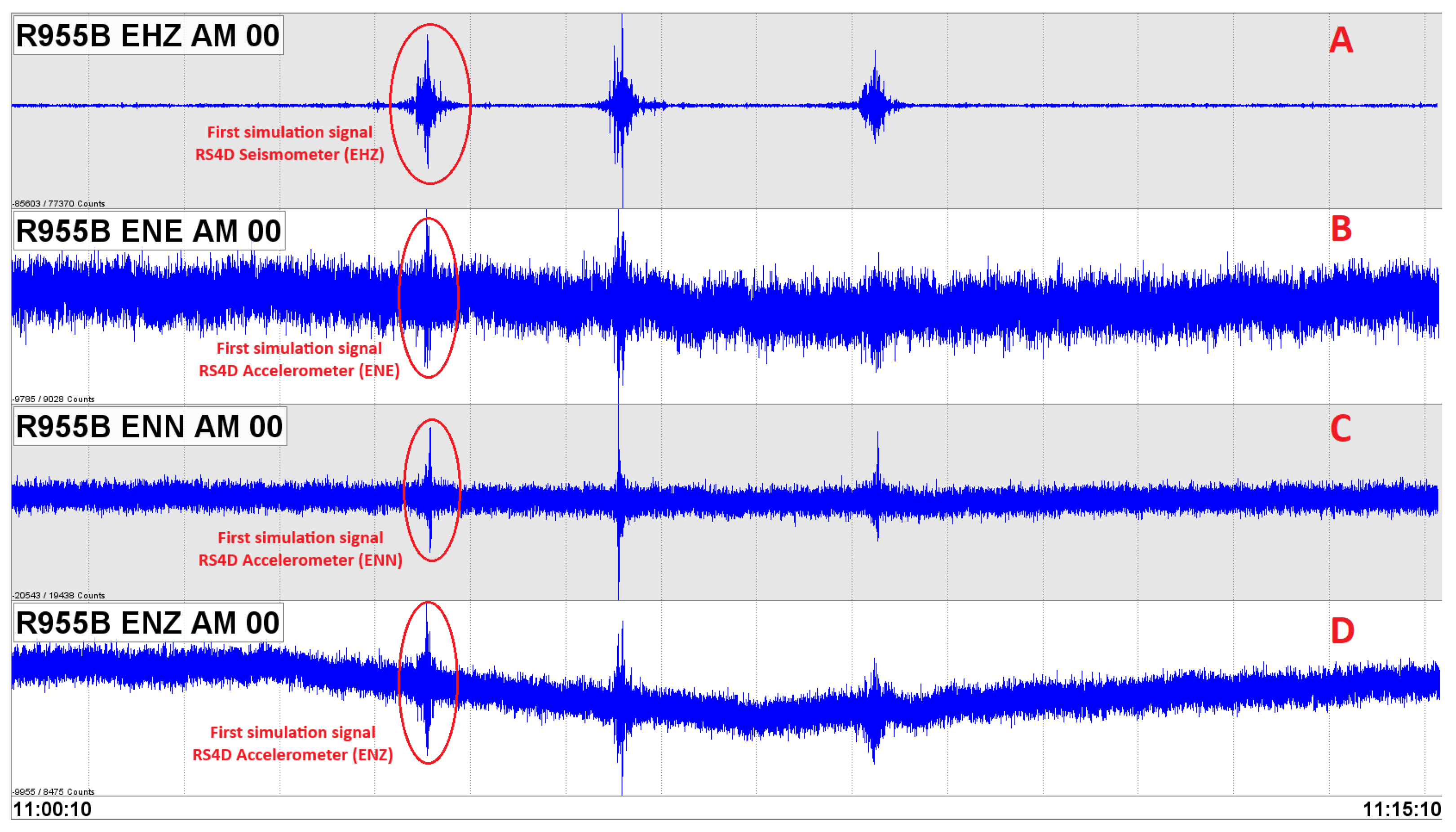
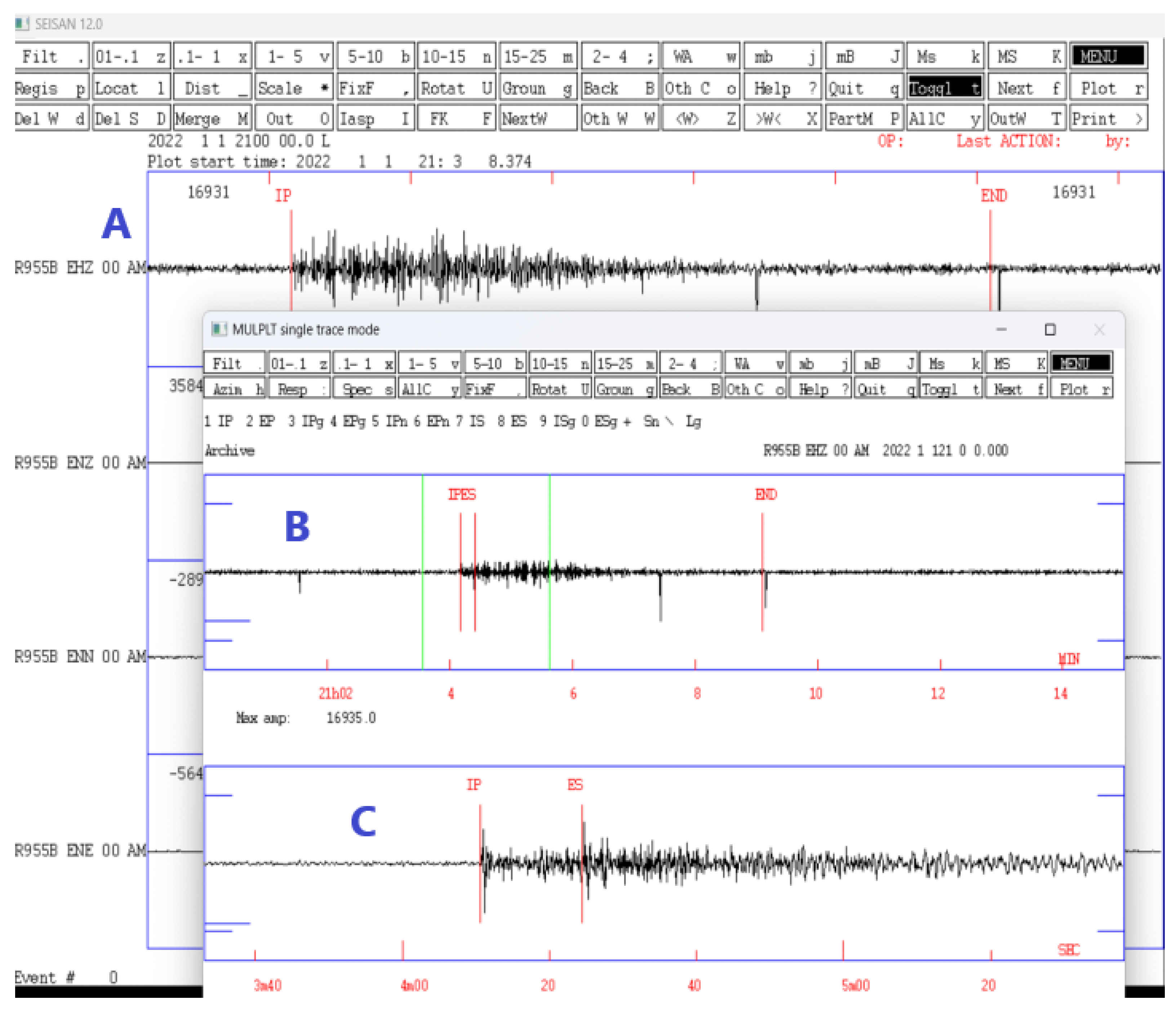
3.2. Seismic Data Processing
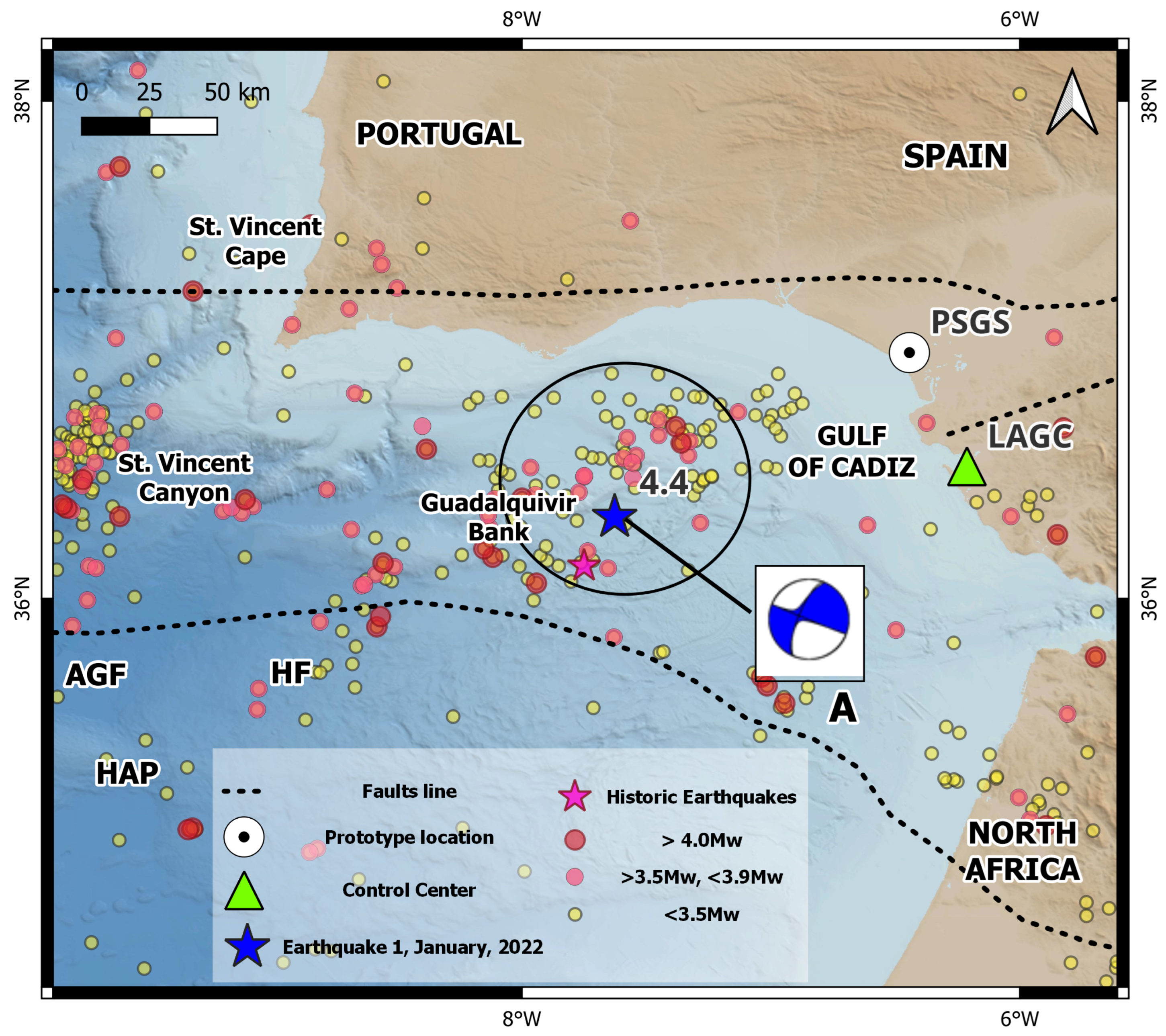
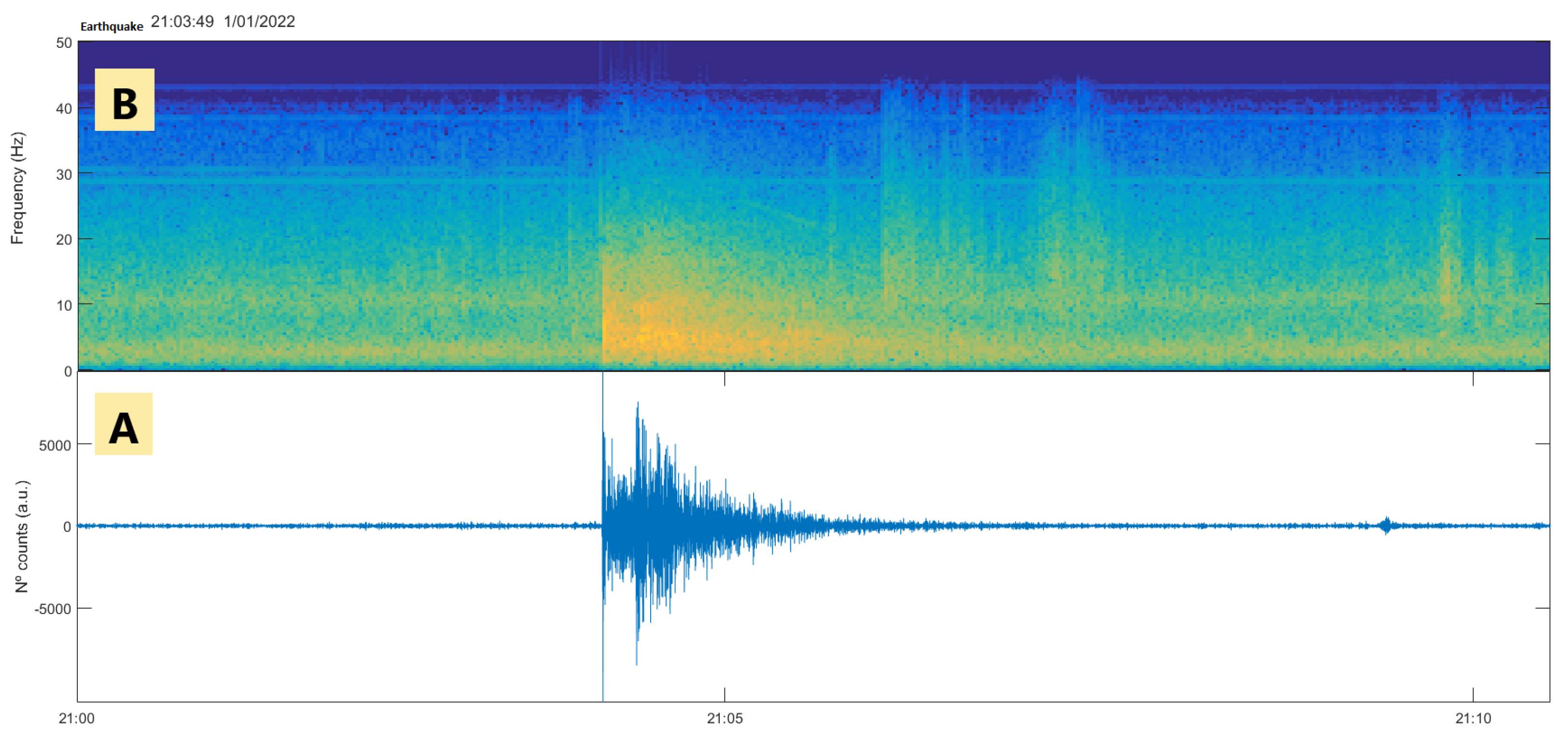
4. Application of the Designed Prototype to the Case Study: Earthquake 4.4 Mw, 1 January 2022, Gulf of Cadiz
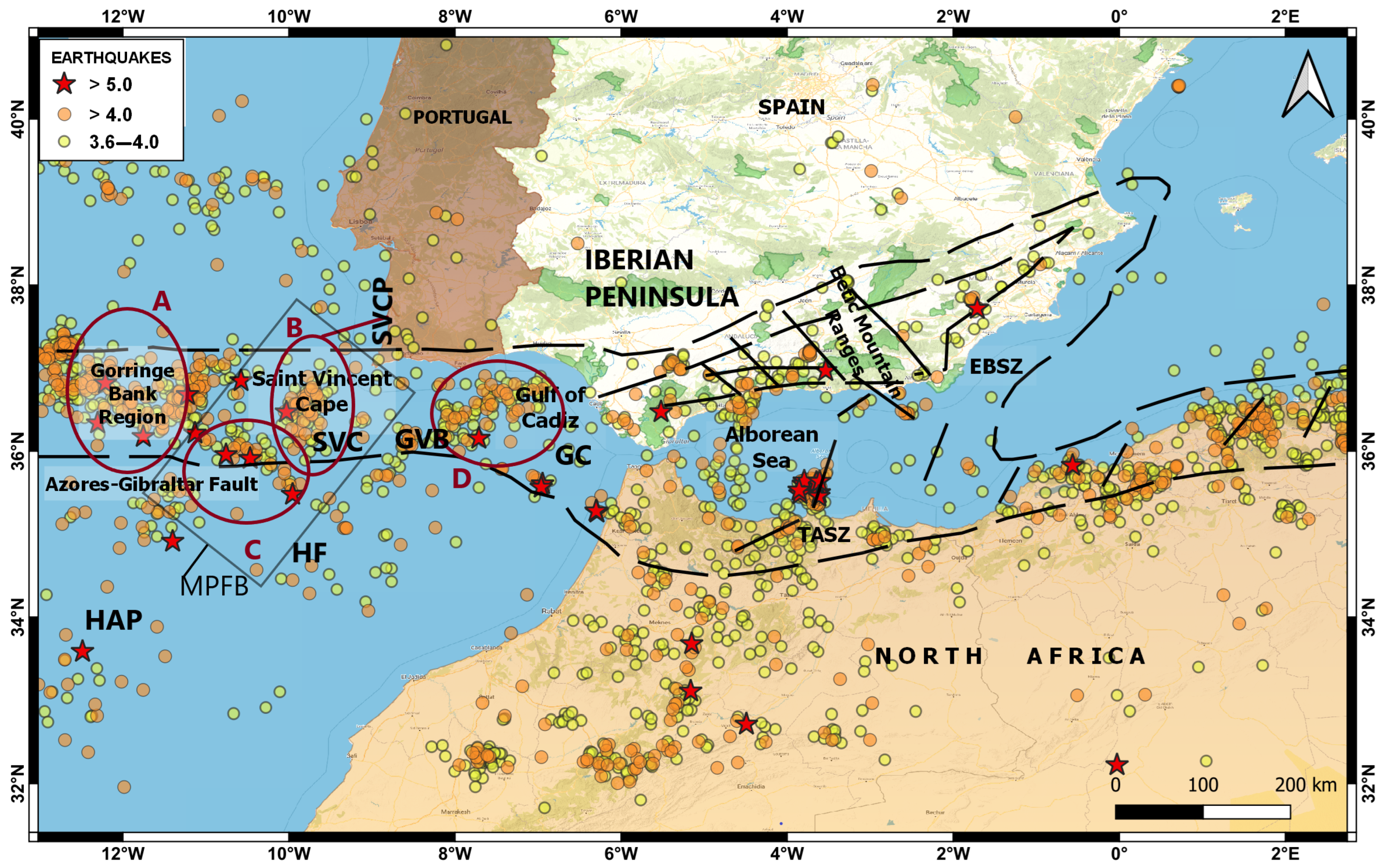
4.1. Seismotectonic Settings of the Gulf of Cadiz
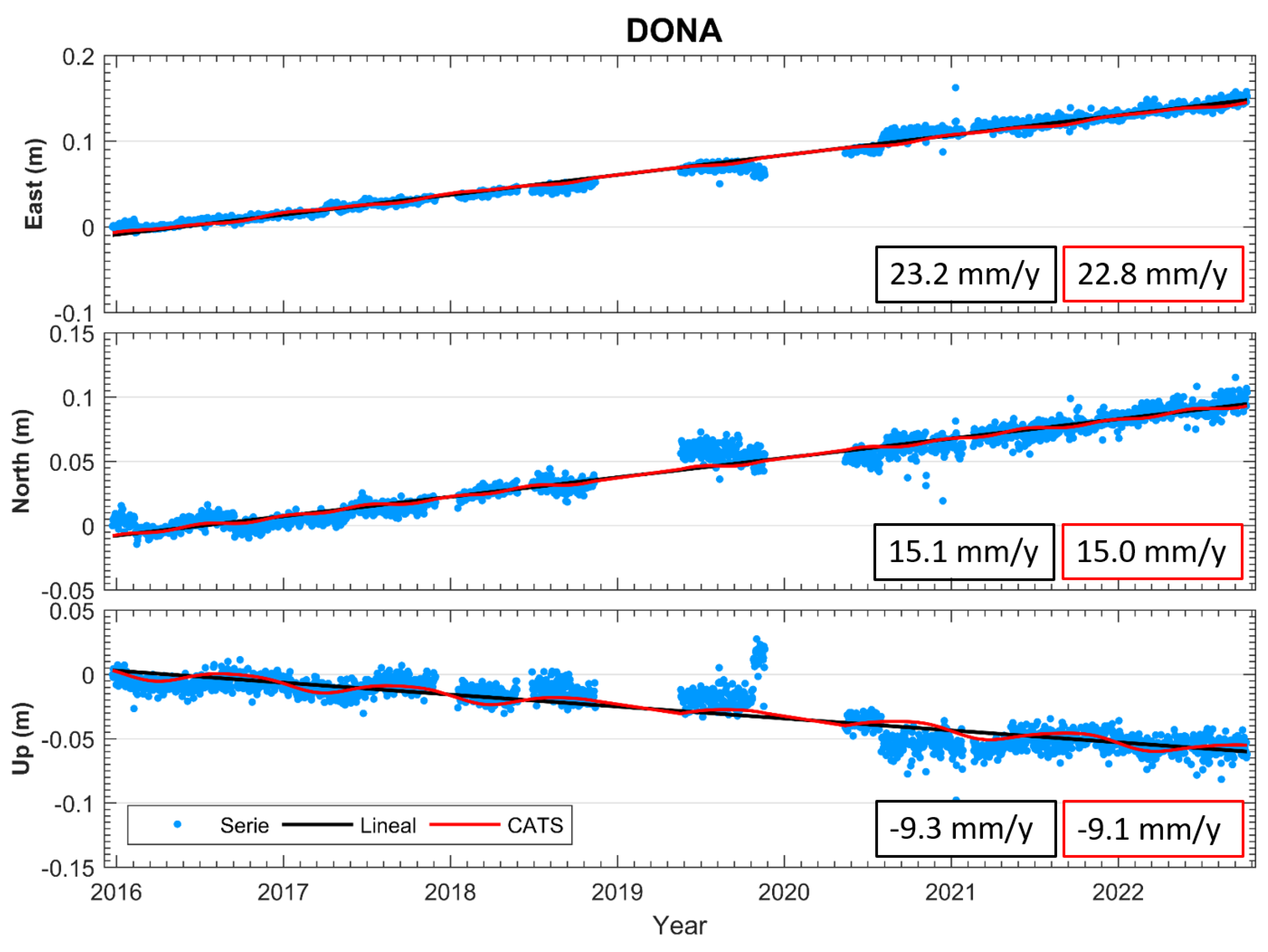
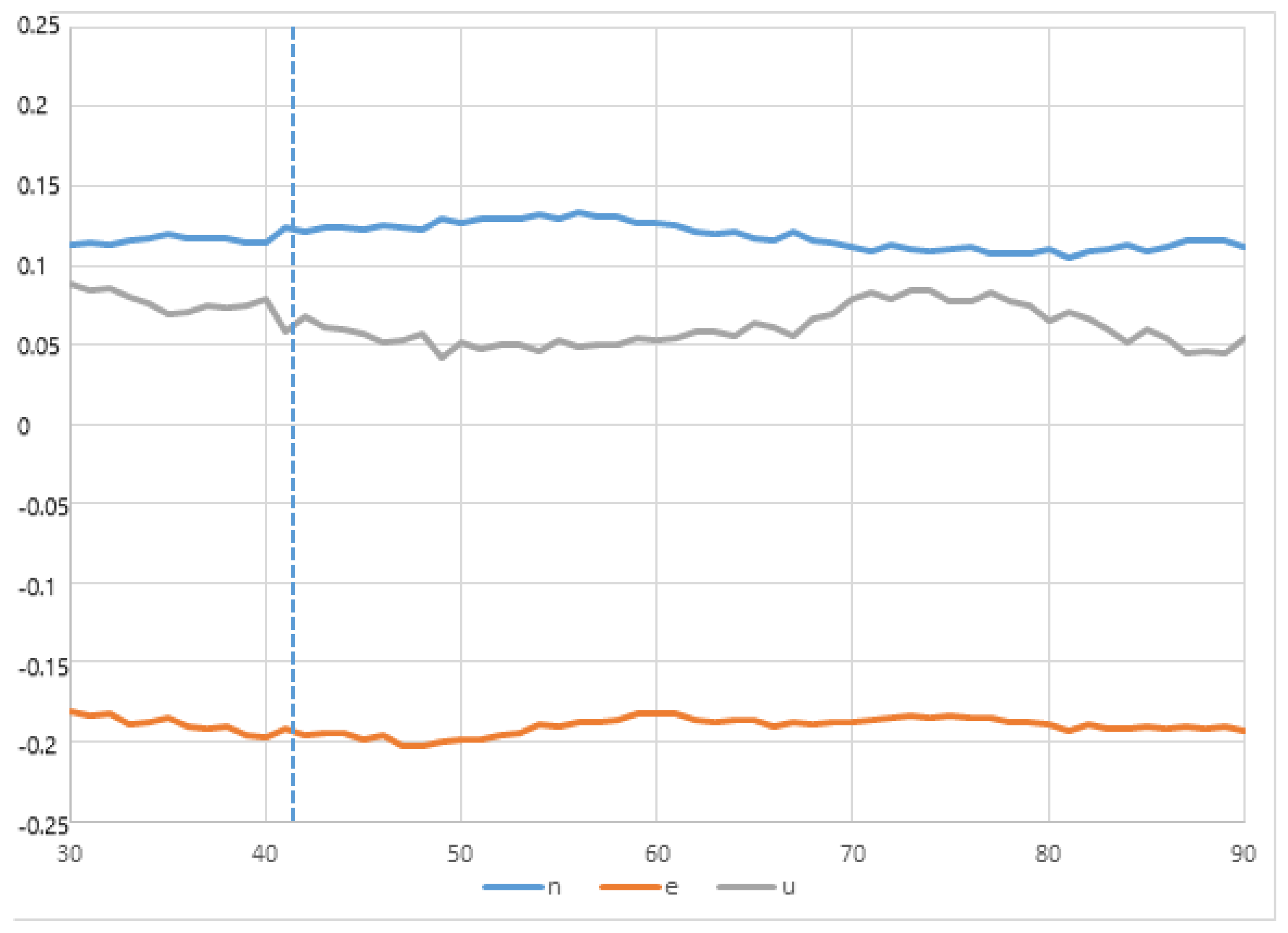
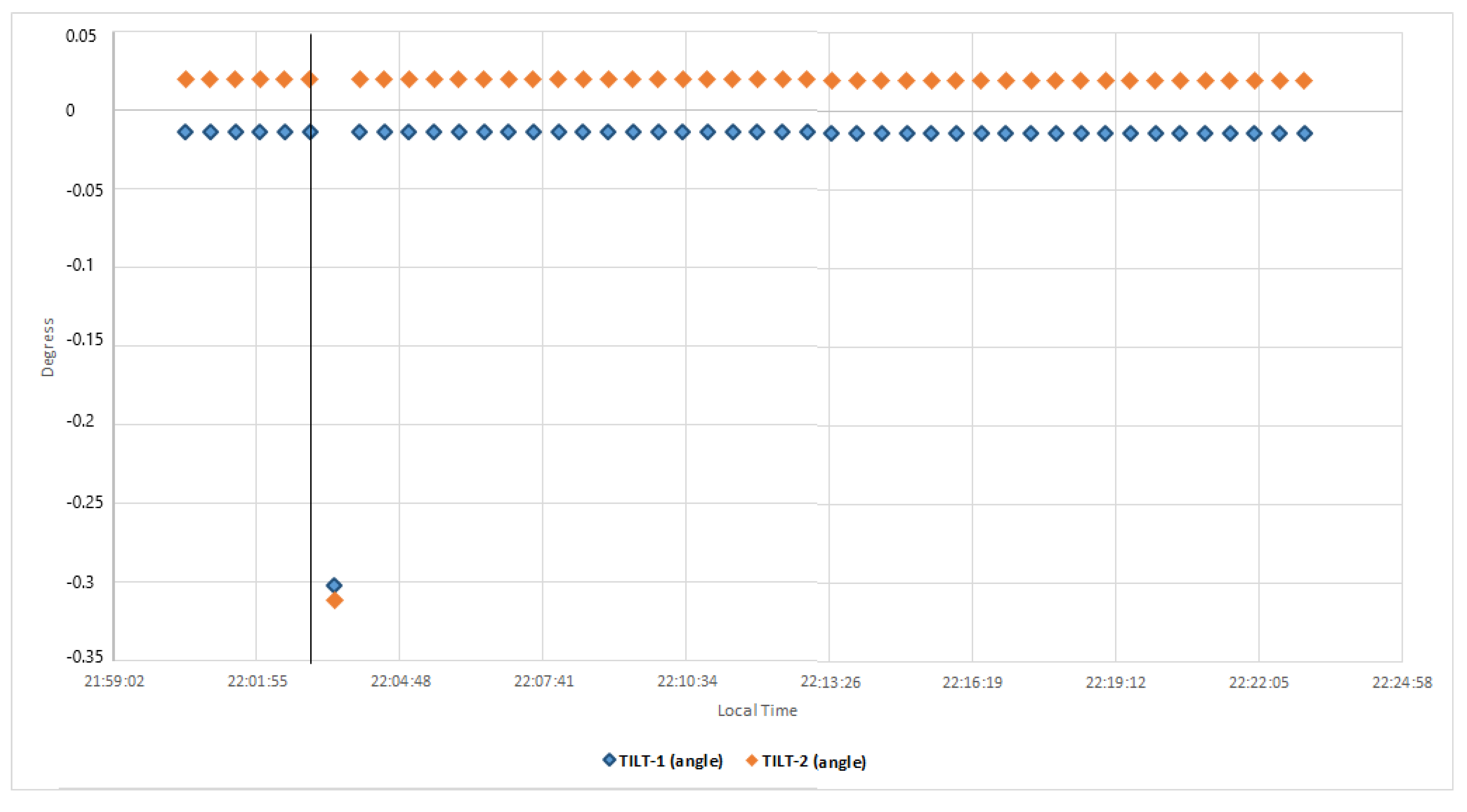
4.2. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIUB | Astronomical Institute of the University of Bern |
| CATS | Create and Analyze Time Series |
| cGPS | Continuous Global Positioning System |
| CSIC | Consejo Superior de Investigaciones Científicas |
| cGNSS | Continuously Operating Global Navigation Satellite Systems |
| CSV | Comma-separated values |
| CORS | Continuously Operating Reference Stations |
| EBD | Estación Biológica Doñana |
| EWS | Early Warning System |
| GPS | Global Positioning System |
| GNSS | Global Navigation Satellite System |
| HAP | Horseshoe Abyssal Plain |
| iLO | Integrated Lights-Out |
| IGN | Instituto Geográfico Nacional |
| IGS | International GNSS Services |
| ITRF | Internacional Terrestrial Reference Frame |
| JPL | Jet Propulsion Laboratory |
| LAGC | Laboratorio de Astronomía Geodesia y Cartografía |
| MEMS | Micro Electro Mechanical Systems |
| NAS | Network Attached Storage |
| NMEA | National Marine Electronics Association |
| NTP | Network Time Protocol |
| PPP | Precise Point Positioning |
| SWARM | Seismic Wave Analysis and Real-time Monitor |
| UCA | Universidad de Cádiz |
| USGS | United States Geological Survey |
| UTC | Universal Time Coordinated |
| VADASE | Velocity and Displacement Autonomous Solution Engine |
| VPN | Virtual Network Protocol |
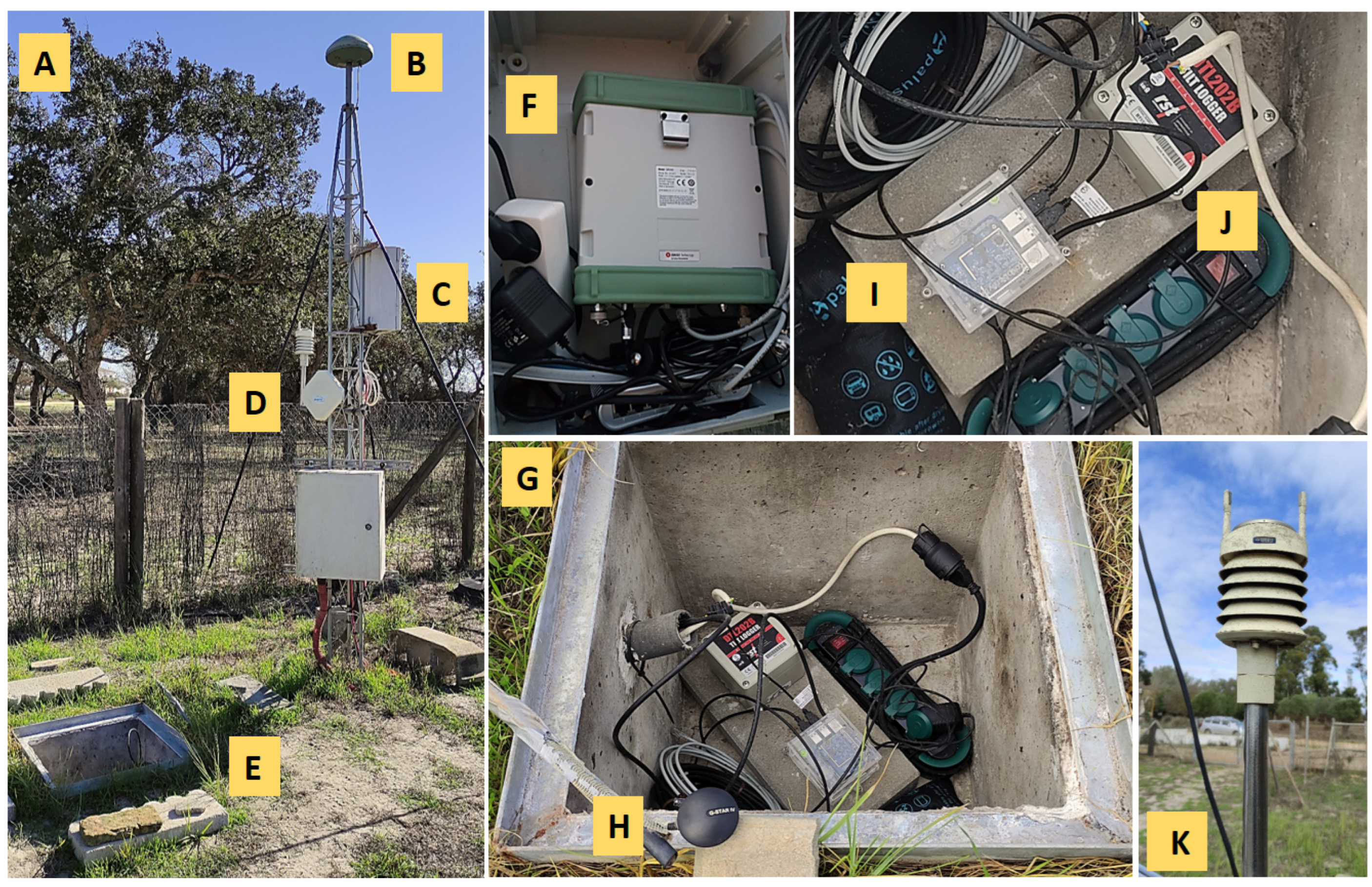
Appendix A. Instrumentation and Specifications
Appendix A.1. Doñana Biological Station

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrumentation | Power Consumption |
|---|---|
| Biaxial Digital Tilt Logger | ∼0.005 W MAX (DC) |
| Raspberry Shake 4D | ∼2.5 W MAX (DC) |
| Leica GR30 GNSS Receiver | ∼3.5 W MAX (DC) |
| Generic Switch (5 ports) | ∼2.0 W MAX (DC) |
| Vaisala WXT520 Transmitter | ∼0.036 W Default (DC) |
| Total Power Consumption | ∼8.041 W (DC) |
Appendix A.2. Control Center
References
- Bilich, A.; Cassidy, J.F.; Larson, K.M. GPS Seismology: Application to the 2002 Mw 7.9 Denali Fault Earthquake. Bull. Seismol. Soc. Am. 2008, 98, 593–606. [Google Scholar] [CrossRef]
- Grapenthin, R.; Johanson, I.A.; Allen, R.M. Operational real–time GPS–enhanced earthquake early warning. J. Geophys. Res. Solid Earth 2014, 119, 7944–7965. [Google Scholar] [CrossRef]
- Xin, S.; Geng, J.; Zeng, R.; Zhang, Q.; Ortega-Culaciati, F.; Wang, T. In–situ real–time seismogeodesy by integrating multi–GNSS and accelerometers. Measurement 2021, 179, 109453. [Google Scholar] [CrossRef]
- Larson, K.M. GPS seismology. J. Geod. 2009, 83, 227–233. [Google Scholar] [CrossRef]
- Basher, R. Global early warning systems for natural hazards: Systematic and people-centred. Philos. Trans. R. Soc. 2006, 364, 2167–2182. [Google Scholar] [CrossRef]
- Ramírez-Zelaya, J.; Jiménez, V.; Barba, P.; Rosado, B.; Gárate, J.; Berrocoso, M. Treatment and Analysis of Multiparametric Time Series from a Seismogeodetic System for Tectonic Monitoring of the Gulf of Cadiz, Spain. Eng. Proc. 2023, 39, 9046. [Google Scholar] [CrossRef]
- Allen, R.M.; Ziv, A. Application of Real–time GPS to Earthquake Early Warning. Geophys. Res. Lett. 2011, 38, L16310. [Google Scholar] [CrossRef]
- Colombelli, S.; Allen, R.M.; Zollo, A. Application of real–time GPS to earthquake early warning in subduction and strike–slip environments. J. Geophys. Res. Solid Earth 2013, 118, 3448–3461. [Google Scholar] [CrossRef]
- Crowell, B.W.; Bock, Y.; Melgar, D. Real–time inversion of GPS data for finite fault modeling and rapid hazard assessment. Geophys. Res. Lett. 2012, 39, L09305. [Google Scholar] [CrossRef]
- Larson, K.M.; Bodin, P.; Gomberg, J. Using 1–Hz GPS Data to Measure Deformations Caused by the Denali Fault Earthquake. Science 2003, 300, 1421–1424. [Google Scholar] [CrossRef] [PubMed]
- Trifunac, M.D.; Todorovska, M.I. A note on the useable dynamic range of accelerographs recording translation. Soil Dyn. Earthq. Eng. 2001, 21, 275–286. [Google Scholar] [CrossRef]
- Bock, Y.; Melgar, D.; Crowell, B.W. Real–time strong–motion broadband displacements from collocated GPS and accelerometers. Bull. Seismol. Soc. Am. 2011, 101, 2904–2925. [Google Scholar] [CrossRef]
- Shu, Y.; Fang, R.; Geng, J.; Zhao, Q.; Liu, J. Broadband Velocities and Displacements From Integrated GPS and Accelerometer Data for High-Rate Seismogeodesy. Geophys. Res. Lett. 2018, 45, 8939–8948. [Google Scholar] [CrossRef]
- Cisco System Official Website. What Is a VPN? Available online: https://www.cisco.com/c/en/us/products/security/vpn-endpoint-security-clients/what-is-vpn.html (accessed on 21 September 2021).
- Rsync Official Website. Rsync Home Page. Available online: https://rsync.samba.org/ (accessed on 4 November 2023).
- NTP Official Website. Network Time Foundation’s NTP Support Wiki. Available online: https://support.ntp.org/bin/view/Main/WebHome (accessed on 4 November 2023).
- USGS Official Website. SWARM Home Page. Available online: https://volcanoes.usgs.gov/software/swarm/index.shtml (accessed on 10 January 2021).
- RST—Instruments Official Website. DT–Logger–Host Software Home Page. Available online: https://rstinstruments.com/product/dt-logger-host-software/ (accessed on 10 July 2020).
- SEISAN Official Website. SEISAN Home Page. Available online: http://www.seisan.info/ (accessed on 4 November 2023).
- Bertiger, W.; Bar-Sever, Y.; Dorsey, A.; Haines, B.; Harvey, N.; Hemberger, D.; Heflin, M.; Lu, W.; Miller, M.; Moore, A.; et al. GipsyX/RTGx, a new tool set for space geodetic operations and research. Adv. Space Res. 2020, 66, 469–489. [Google Scholar] [CrossRef]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software, Version 5.2 User Manual; Astronomical Institute, University of Bern, Bern Open Publishing: Bern, Switzerland, 2015. Available online: https://boris.unibe.ch/id/eprint/72297 (accessed on 4 November 2023).
- Rosado, B.; Fernández-Ros, A.; Jiménez, A.; Berrocoso, M. Modelo de deformación horizontal GPS de la región sur de la Península Ibérica y norte de África (SPINA). BoletíN GeolóGico Min. 2017, 128, 141–156, ISSN: 0366-0176. [Google Scholar] [CrossRef]
- Rosado, B.; Fernández-Ros, A.; Berrocoso, M.; Prates, G.; Gárate, J.; De Gil, A.; Geyer, A. Volcano–tectonic dynamics of Deception Island (Antarctica): 27 years of GPS observations (1991–2018). J. Volcanol. Geotherm. Res. 2019, 381, 57–82. [Google Scholar] [CrossRef]
- Barba, P.; Rosado, B.; Ramírez–Zelaya, J.; Berrocoso, M. Comparative Analysis of Statistical and Analytical Techniques for the Study of GNSS Geodetic Time Series. Eng. Proc. 2021, 5, 21. [Google Scholar] [CrossRef]
- Incorporated Research Institutions for Seismology (IRIS) Official Website. Data Formats Section, IRIS Web Page. Available online: http://ds.iris.edu/ds/nodes/dmc/data/formats/miniseed/ (accessed on 15 March 2019).
- International GNSS Service Official Website. Rinex Format Description. Available online: https://igs.org/wg/rinex/#documents-formats (accessed on 1 February 2019).
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Blewitt, G.; Hammond, W.; Kreemer, C.; Plag, H.P.; Stein, S.; Okal, E. GPS for real-time earthquake source determination and tsunami warning systems. J. Geod. 2009, 83, 335–343. [Google Scholar] [CrossRef]
- Xu, P.; Shi, C.; Liu, J.; Niu, X.; Zhang, Q.; Yanagidani, T. High–rate precise point positioning (PPP) to measure seismic wave motions: An experimental comparison of GPS PPP with inertial measurement units. J. Geod. 2013, 87, 361–372. [Google Scholar] [CrossRef]
- Berrocoso, M.; Ramírez, M.E.; Pérez-Peña, A.; Enríquez-Salamanca, J.M.; Fernández, A.; Torrecillas, C. El Sistema de Posicionamiento Global. Servicio de Publicaciones de la Universidad de Cádiz: Cádiz, Spain, 2004. [Google Scholar]
- Havskov, J.; Voss, P.H.; Ottemöller, L. Seismological observatory software: 30 Years of SEISAN. Seismol. Res. Lett. 2020, 91, 1846–1852. [Google Scholar] [CrossRef]
- Martín-Dávila, J.; Gárate, J.; Pazos, A. Geophysical/Geodetical Activities of the ROA to Study the Eurasia–Africa Plate Boundary Zone in the Ibero–Maghrebian Region; The Tenth General Assembly of the Wegener Project; Extended Abstracts Book; Ministerio de Defensa: Madrid, Spain, 2000.
- Jiménez-Munt, I.; Negredo, A. Neotectonic modelling of the western part of the Africa-Eurasia plate boundary: From the Mid–Atlantic ridge to Algeria. Earth Planet. Sci. Lett. 2003, 205, 257–271. [Google Scholar] [CrossRef]
- Dewey, J.F.; Helman, M.L.; Turco, E.; Hutton, D.H.; Knott, S.D. Kinematics of the Western Mediterranean. In Alpine Tectonics; Special Publication 45; The Geological Society: London, UK, 1989. [Google Scholar]
- Nocquet, J.M. Present-day kinematics of the Mediterranean: A comprehensive overview of GPS results. Tectonophysics 2012, 579, 220–242. [Google Scholar] [CrossRef]
- Buforn, E.; Bezzeghoud, M.; Udías, A.; Pro, C. Seismic sources on the Iberia–African plate boundary and their tectonic implications. Pure Appl. Geophys. 2004, 161, 623–646. [Google Scholar] [CrossRef]
- Maramai, A.; Brizuela, B.; Graziani, L. The Euro-Mediterranean Tsunami Catalogue. Ann. Geophys. 2014, 57, S0435. [Google Scholar] [CrossRef]
- Baptista, M.A.; Miranda, J.M.; Chierici, F.; Zitellini, N. New study of the 1755 earthquake source based on multi–channel seismic survey data and tsunami modeling. Nat. Hazards Earth Syst. Sci. 2003, 3, 333–340. [Google Scholar] [CrossRef]
- Baptista, M.A.; Miranda, J.M. Revision of the Portuguese catalog of tsunamis. Nat. Hazards Earth Syst. Sci. 2009, 9, 25–42. [Google Scholar] [CrossRef]
- Geissler, W.H.; Matias, L.; Stich, D.; Carrilho, F.; Jokat, W.; Monna, S.; Zitellini, N. Focal mechanisms for sub-crustal earthquakes in the Gulf of Cadiz from a dense OBS deployment. Geophys. Res. Lett. 2010, 37, L18309. [Google Scholar] [CrossRef]
- Silva, S.; Terrinha, P.; Matias, L.; Duarte, J.C.; Roque, C.; Ranero, C.R.; Zitellini, N. Micro-seismicity in the Gulf of Cadiz: Is there a link between micro-seismicity, high magnitude earthquakes and active faults? Tectonophysics 2017, 717, 226–241. [Google Scholar] [CrossRef]
- Buforn, E.; Udías, A. Sismicidad y mecanismo focal de los terremotos de la región Cabo de San Vicente–Argelia. Rev. Soc. GeolóGica España 2007, 20, 301–310. Available online: https://sge.usal.es/archivos/REV/20(3-4)/Art12.pdf (accessed on 5 November 2022).
- Vázquez, J.; Ercilla, G.; Alonso, B.; Peláez, J.; Palomino, D.; León, R.; Bárcenas, P.; Casas, D.; Estrada, F.; Fernández-Puga, M.C.; et al. Triggering Mechanisms of Tsunamis in the Gulf of Cadiz and the Alboran Sea: An Overview; Historical Earthquakes, Tsunamis and Archaeology in the Iberian Peninsula; Springer Nature: Singapore, 2022; pp. 65–104. [Google Scholar] [CrossRef]
- Stich, D.; Mancilla, F.; Morales, J. Crust–mantle coupling in the Gulf of Cadiz (SW–Iberia). Geophys. Res. Lett. 2005, 32, L13306. [Google Scholar] [CrossRef]
- Stich, D.; Martin, R.; Morales, J. Moment tensor inversion for Iberia–Maghreb earthquakes (2005–2008). Tectonophysics 2010, 483, 390–398. [Google Scholar] [CrossRef]
- Martín, R.; Stich, D.; Morales, J.; Mancilla, F. Moment tensor solutions for the Iberian–Maghreb region during the IberArray deployment (2009–2013). Tectonophysics 2015, 663, 261–274. [Google Scholar] [CrossRef]
- Sallarès, V.; Gailler, A.; Gutscher, M.; Graindorge, D.; Bartolomé, R.; Gràcia, E.; Díaz, J.; Dañobeitia, J.; Zitellini, N. Seismic evidence for the presence of Jurassic oceanic crust in the central Gulf of Cadiz (SW Iberian margin). Earth Planet. Sci. Lett. 2011, 311, 112–123. [Google Scholar] [CrossRef]
- Leica Geosystems Official Website. Leica GR30 GNSS Receiver Datasheet. Available online: https://leica-geosystems.com/en-gb/products/gnss-reference-networks/receivers/leica-gr50-and-gr30 (accessed on 11 September 2020).
- RST Instruments Official Website. Digital Tilt Loggers Specifications. Available online: https://rstinstruments.com/product/dtl201b-dtl202b-uniaxial-biaxial-digital-tilt-loggers/ (accessed on 10 November 2021).
- Raspberry Official Website. Raspberry Shake RS4D Specifications Manual. Available online: https://manual.raspberryshake.org/_downloads/SpecificationsforRaspberryShake4DMEMSV4.pdf (accessed on 11 November 2021).
- Ublox Official Website. UBlox USB GNSS Receiver Manual. Available online: http://bit.ly/QGPgnss (accessed on 14 February 2021).
- Vaisala Instruments Official Website. Vaisala “WKT520” User Guide. Available online: https://www.vaisala.com/sites/default/files/documents/M210906EN-C.pdf (accessed on 21 September 2020).
- Citrix XenServer Official Website. XenServer 7.0 Standard Edition Web Page. Available online: https://www.citrix.com/es-es/downloads/citrix-hypervisor/product-software/xenserver-70-standard-edition.html (accessed on 15 February 2019).
- HP Support Center Official Website. HP ProLiant DL360 G7 Server Overview. Available online: https://support.hpe.com/hpesc/public/docDisplay?docId=emr_na-c02206768 (accessed on 3 October 2019).
- Synology Official Website. Synology Hardware Specifications. Available online: https://www.synology.com/es-es/products/RS1221+ (accessed on 10 September 2019).
- HP Support Center Official Website. HP ProLiant DL180 G6 Server Overview. Available online: https://support.hpe.com/hpesc/public/docDisplay?docLocale=en_US&docId=c01709693 (accessed on 2 October 2019).














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramírez-Zelaya, J.; Rosado, B.; Jiménez, V.; Gárate, J.; Peci, L.M.; de Gil, A.; Pérez-Peña, A.; Berrocoso, M. Design and Implementation of a Prototype Seismogeodetic System for Tectonic Monitoring. Sensors 2023, 23, 8986. https://doi.org/10.3390/s23218986
Ramírez-Zelaya J, Rosado B, Jiménez V, Gárate J, Peci LM, de Gil A, Pérez-Peña A, Berrocoso M. Design and Implementation of a Prototype Seismogeodetic System for Tectonic Monitoring. Sensors. 2023; 23(21):8986. https://doi.org/10.3390/s23218986
Chicago/Turabian StyleRamírez-Zelaya, Javier, Belén Rosado, Vanessa Jiménez, Jorge Gárate, Luis Miguel Peci, Amós de Gil, Alejandro Pérez-Peña, and Manuel Berrocoso. 2023. "Design and Implementation of a Prototype Seismogeodetic System for Tectonic Monitoring" Sensors 23, no. 21: 8986. https://doi.org/10.3390/s23218986