
A Novel Angle Segmentation Method for Magnetic Encoders Based on Filtering Window Adaptive Adjustment Using Improved Particle Swarm Optimization

Abstract
:1. Introduction
- (1)
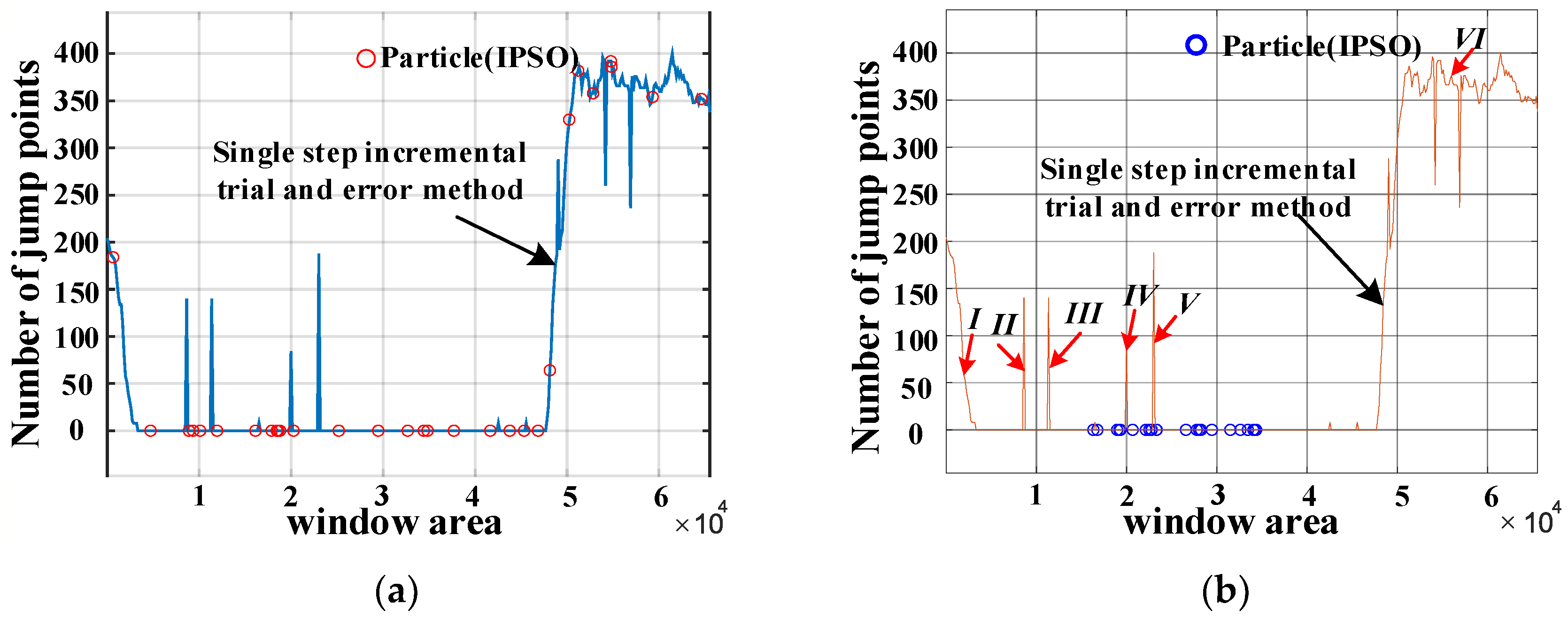
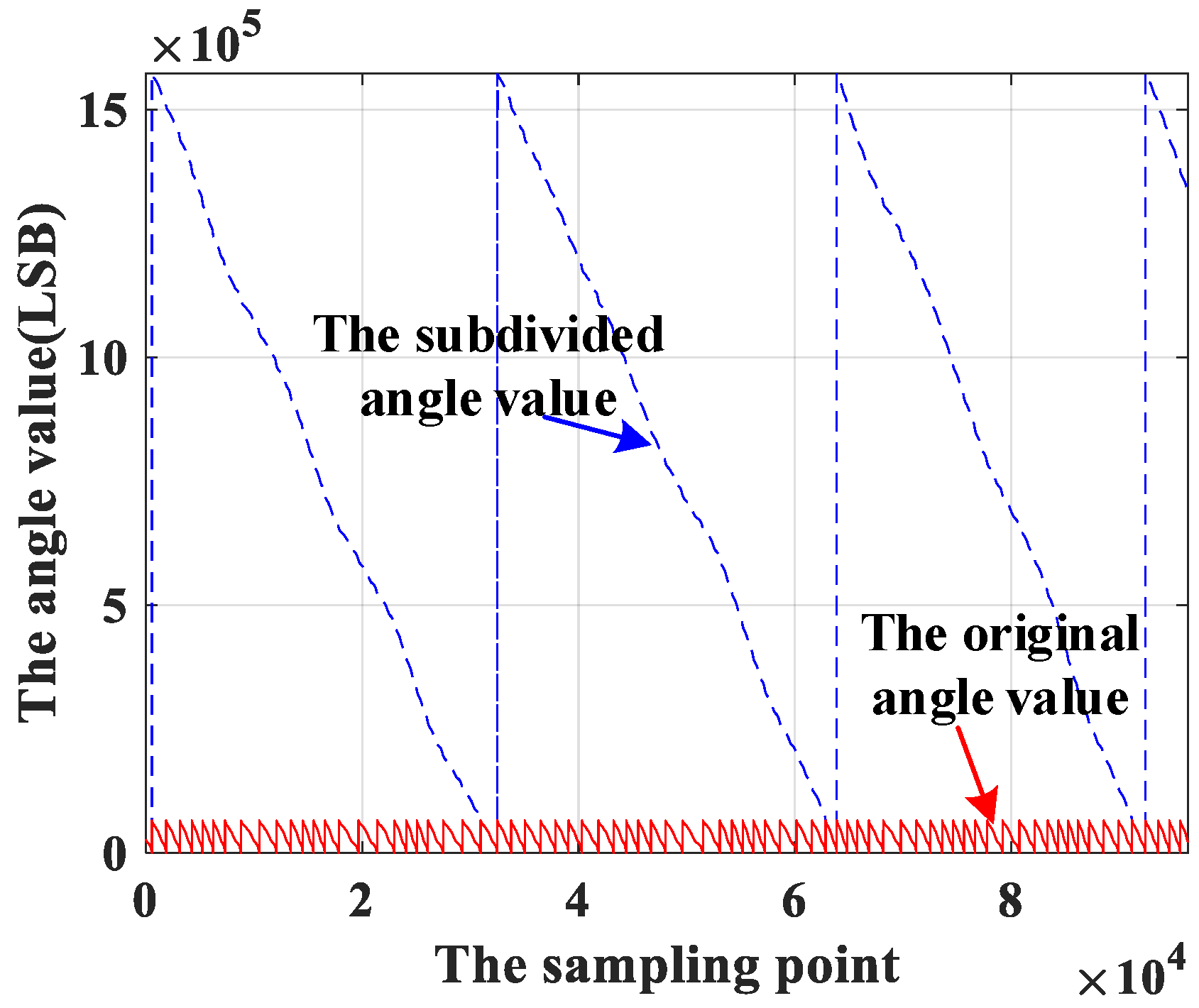
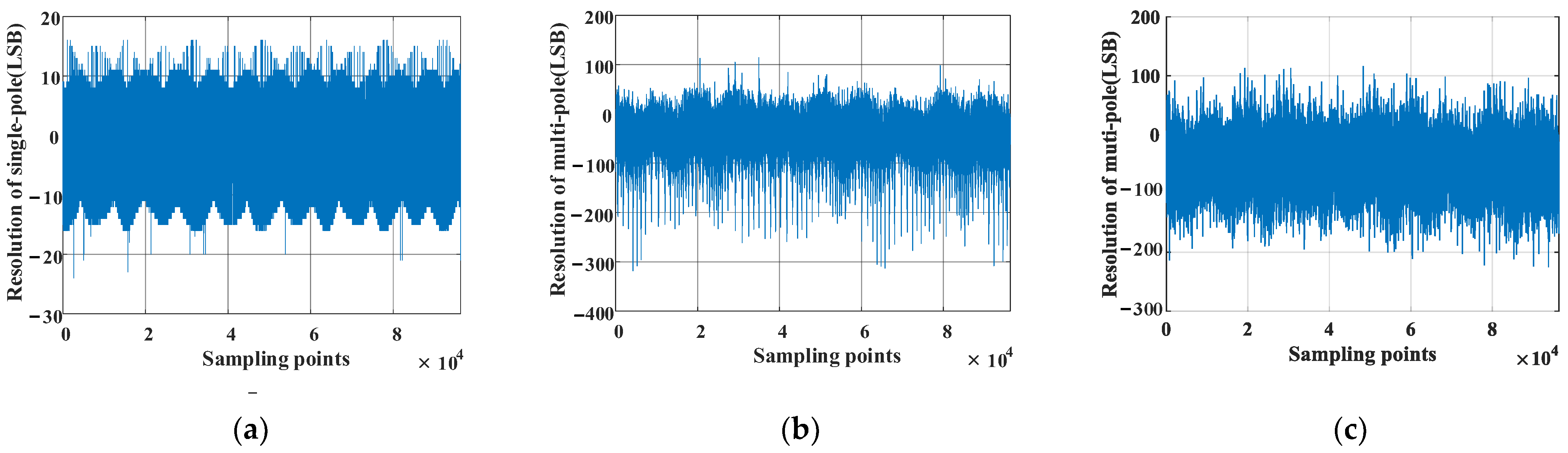
- The window width is screened by a window-filtering angle subdivision algorithm with a dynamic inertia coefficient, which is used to judge the number of poles of the magnetic encoder for which local optimal solutions fail to occur. Hence, an accurate optimal solution can be obtained with fewer iterations, which boosts the operation speed, avoiding the appearance of jump points of the magnetic encoder caused by the error estimation of the window width. Meanwhile, the encoder resolution is improved after subdivision.
- (2)
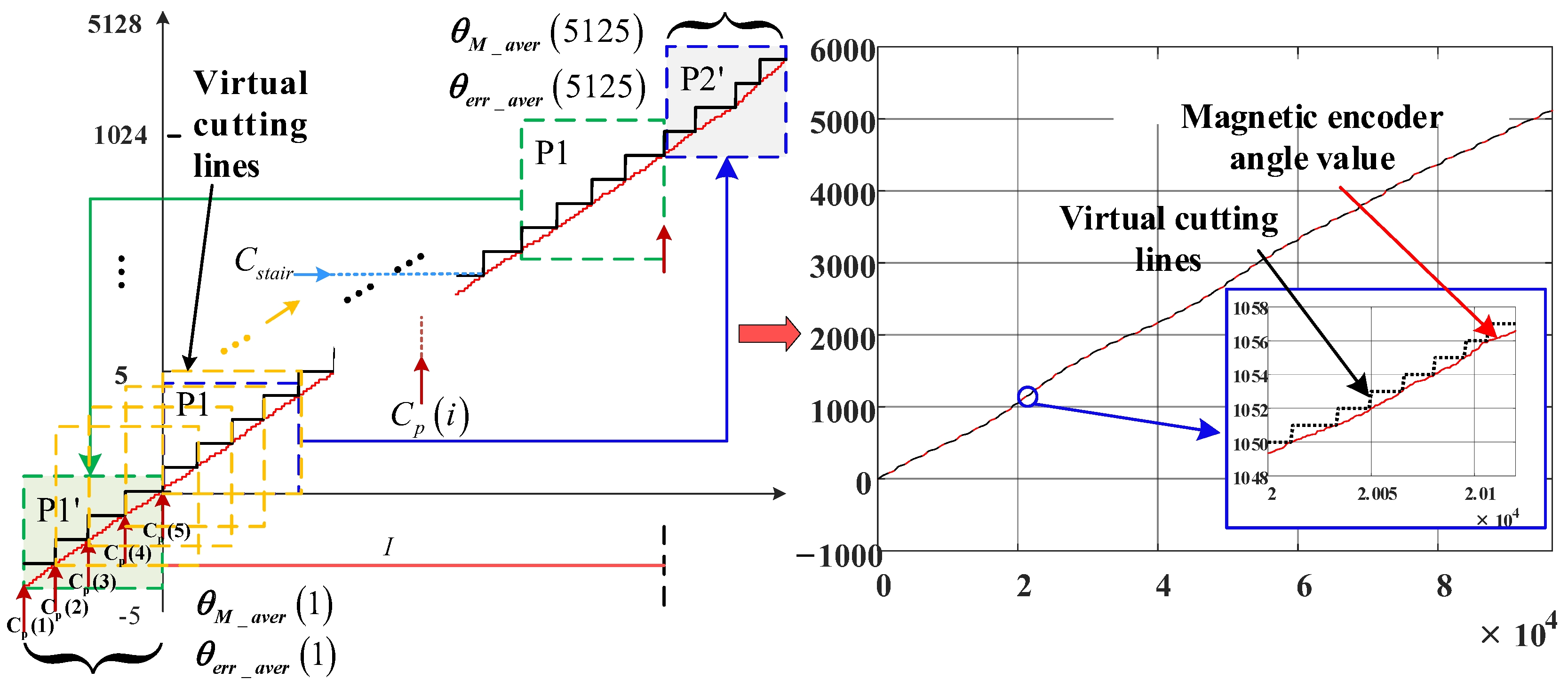
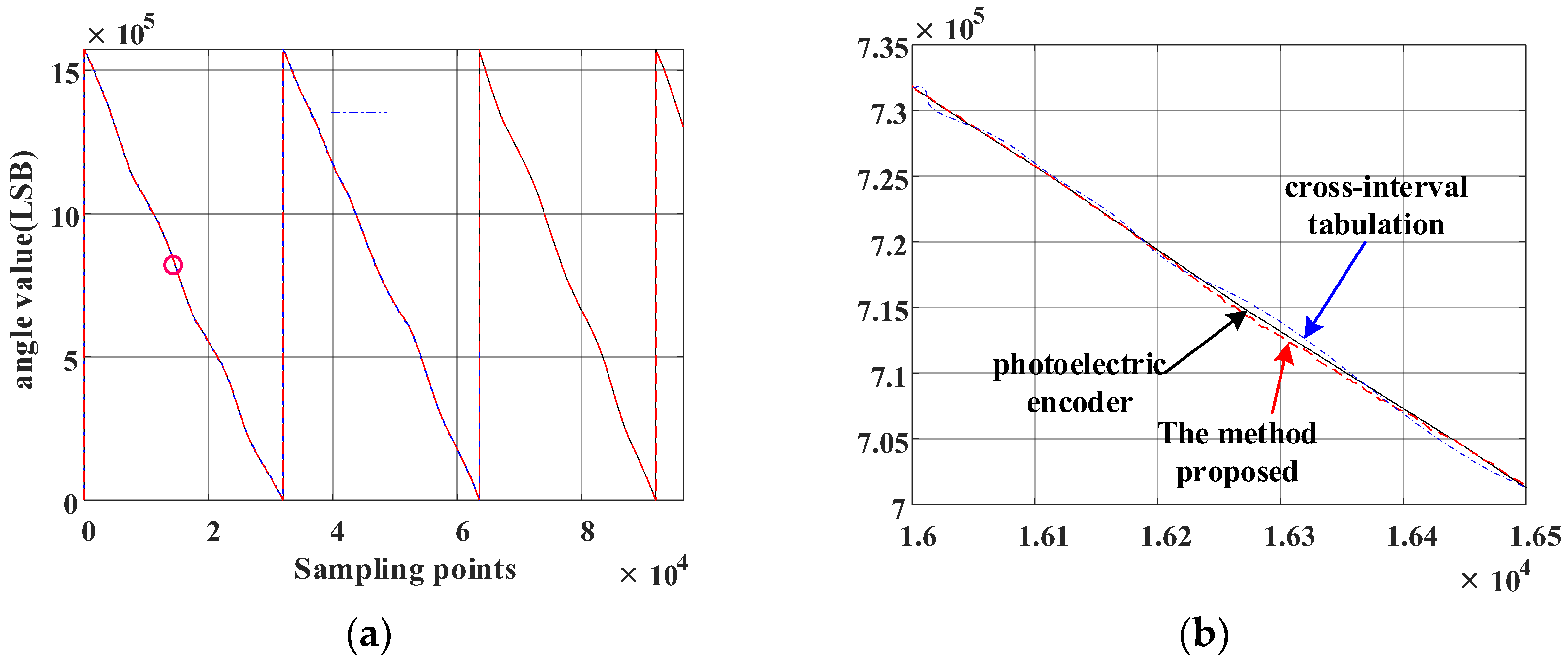
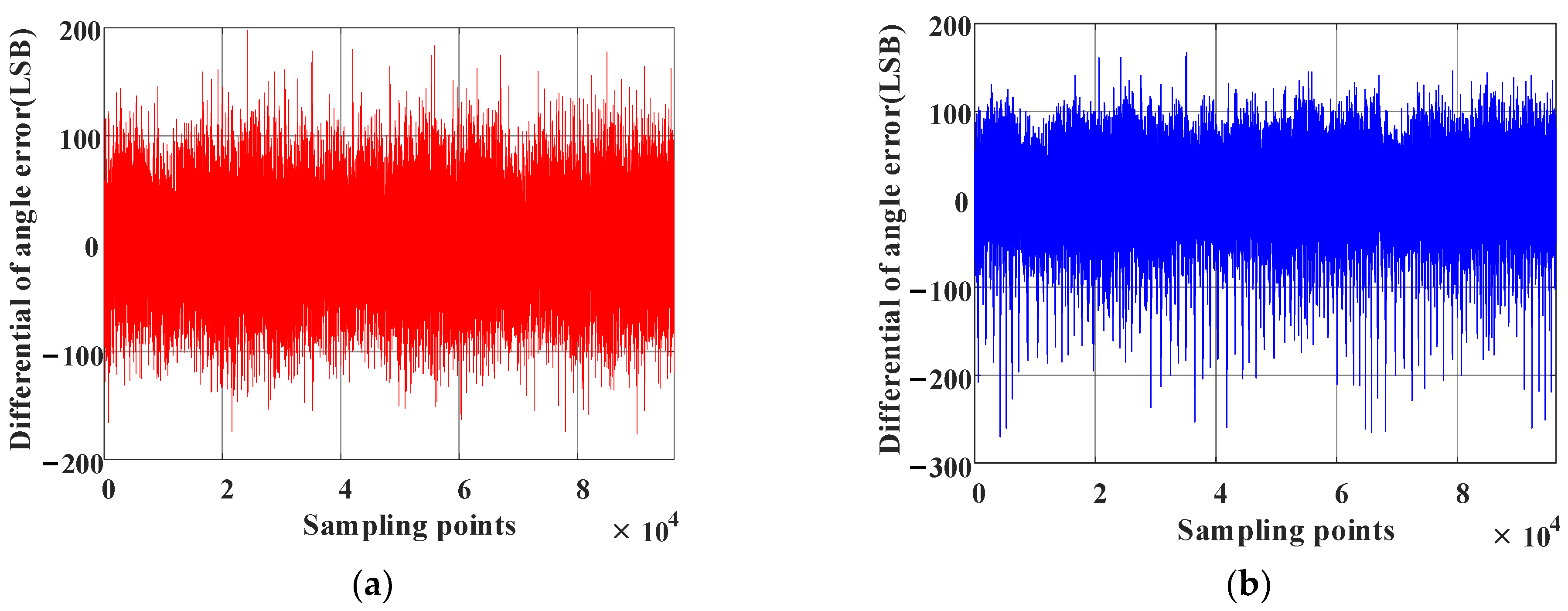
- The accuracy of the magnetic encoder is enhanced by a linear interpolation compensation tabulation algorithm based on virtual cutting. The error compensation table is stored in the fixed memory area of the MCU, which can be retrieved in time as the servo control system works, and the compensation result remains stable and reliable. Compared with cross-interval tabulation employed in the arctangent method [26], the compensation method based on virtual cutting enables the angle of the magnetic encoder to remain high.
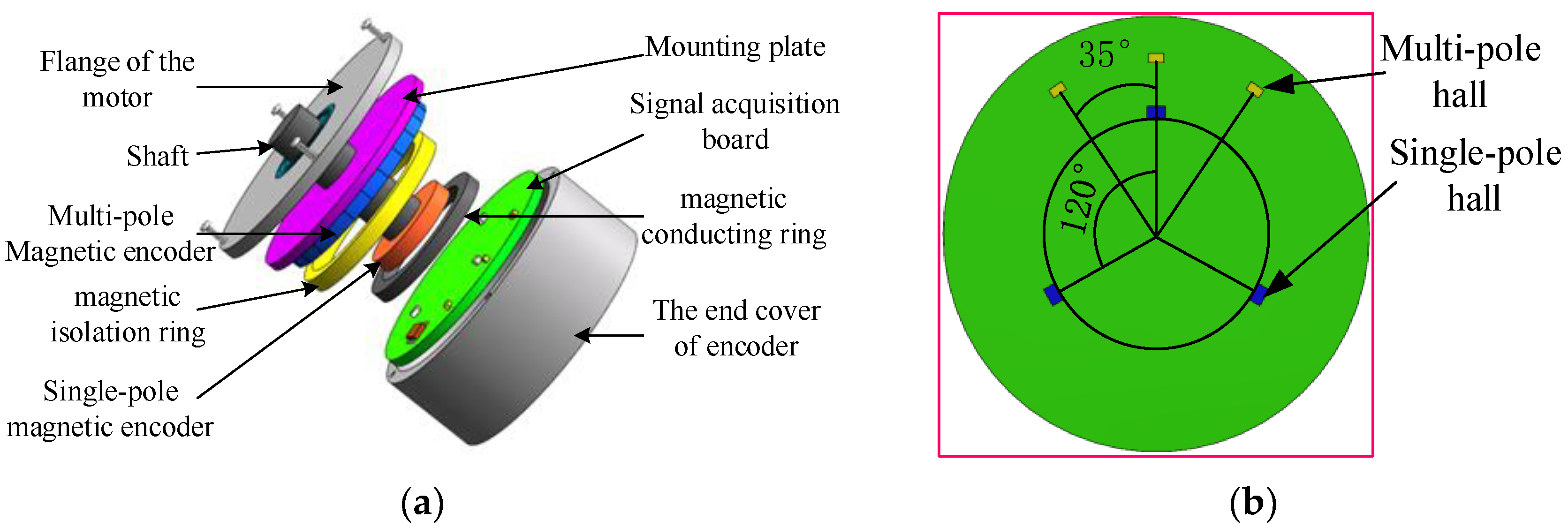
2. Structure and Working Principle
2.1. Structure Design
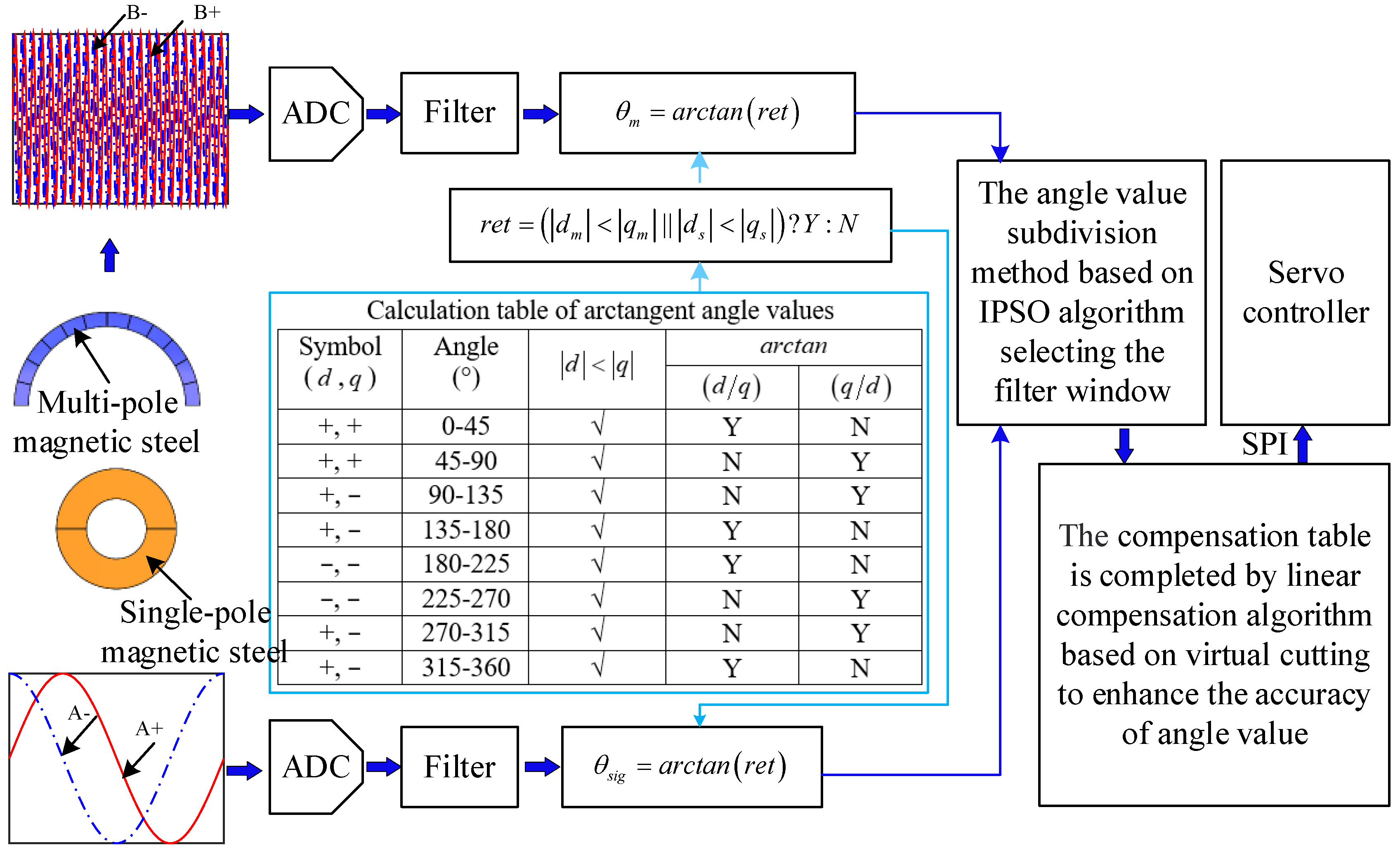
2.2. Working Principle
3. The Window Filter Angle Value Division Method Based on the IPSO
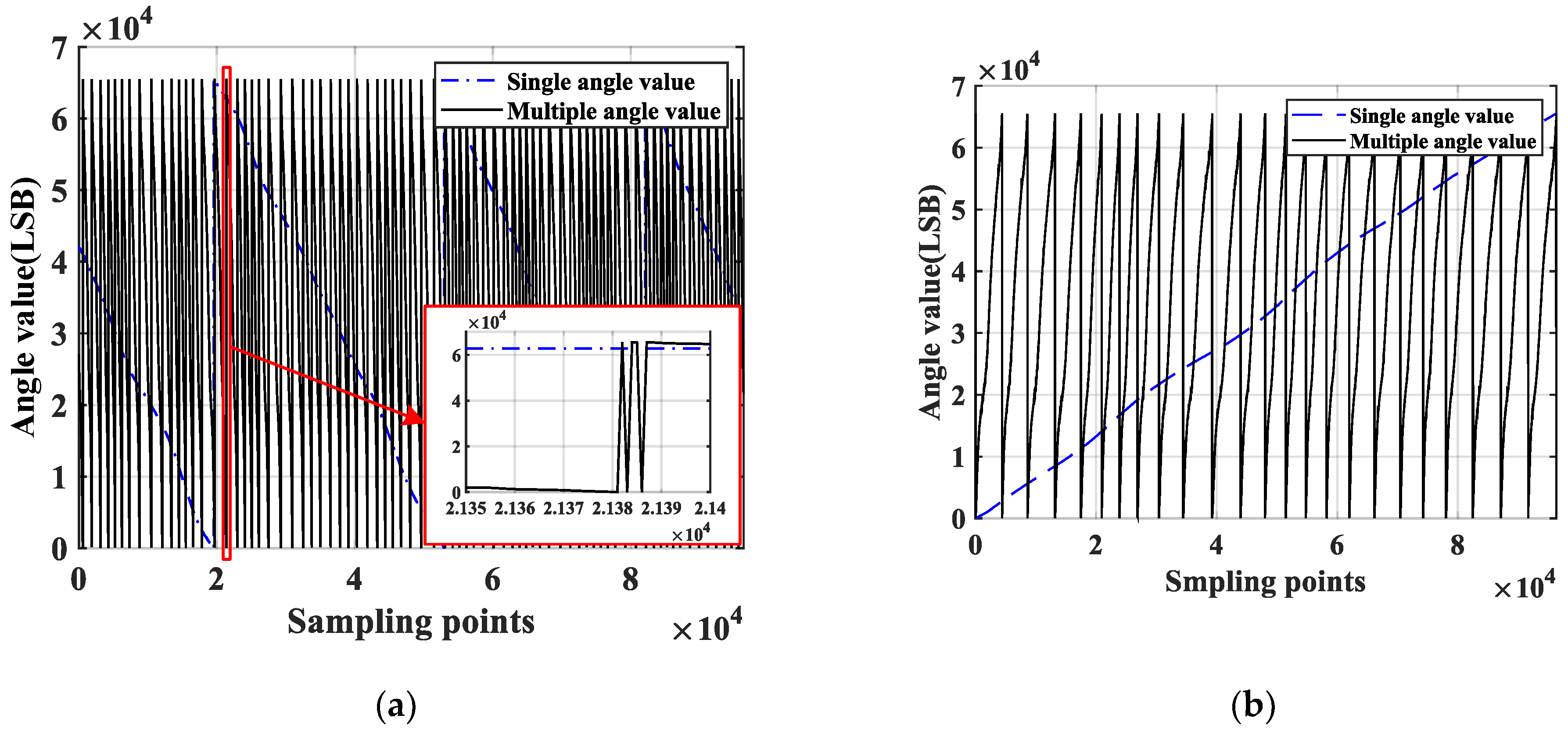
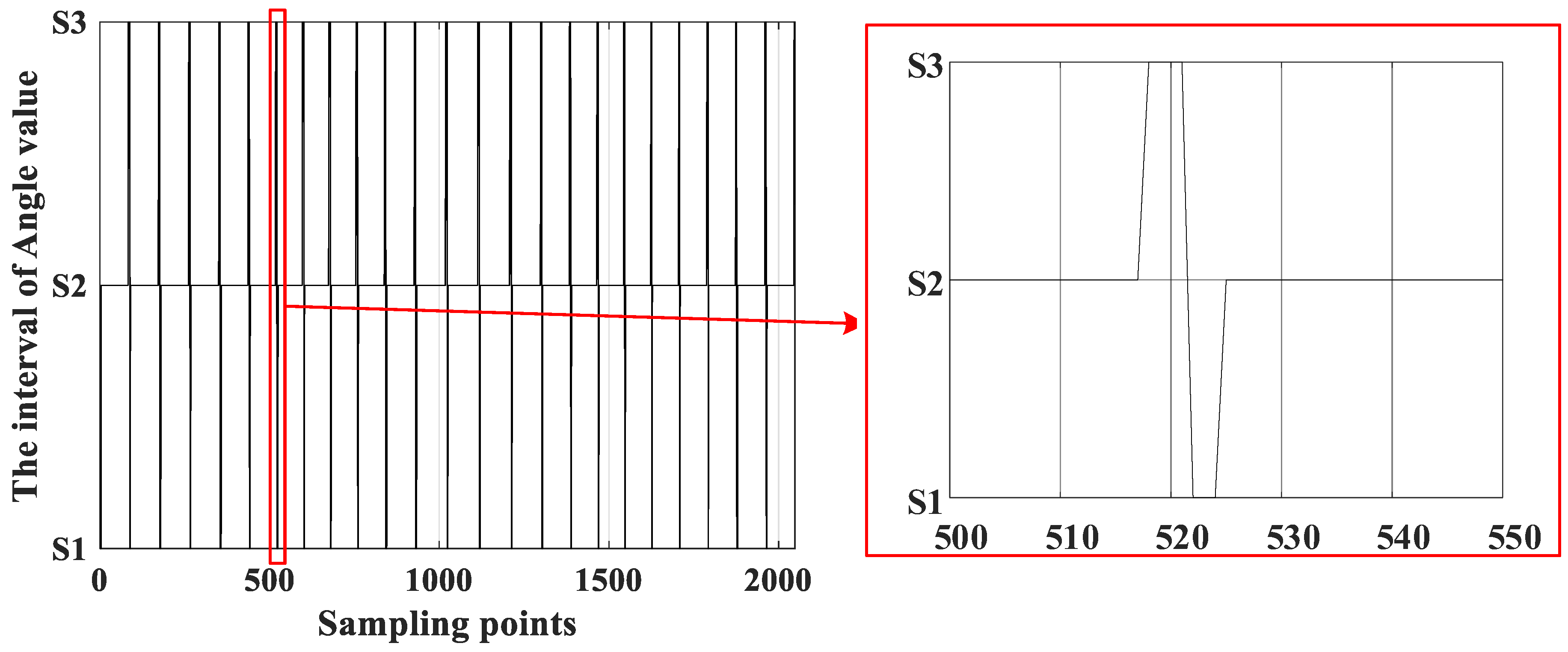
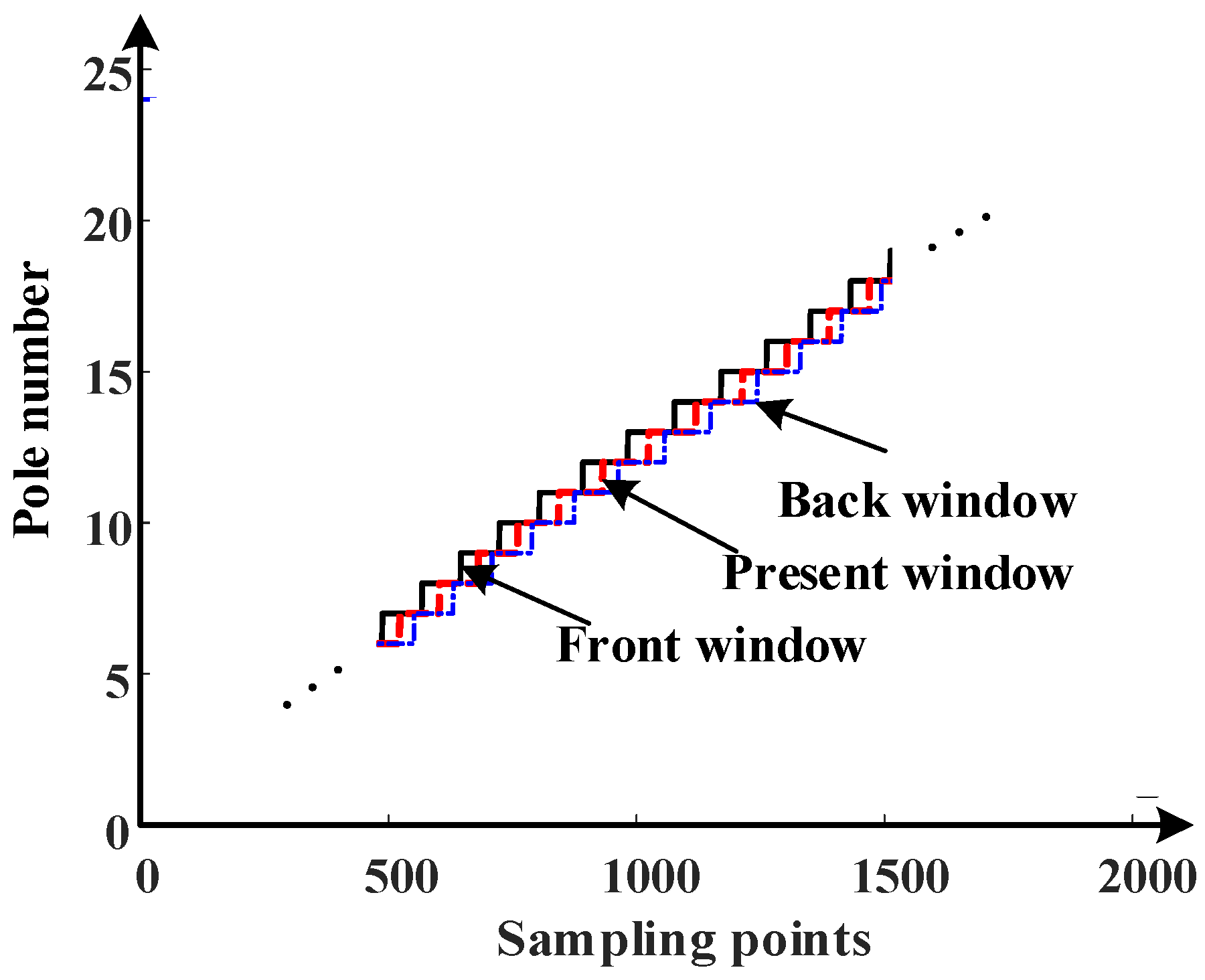
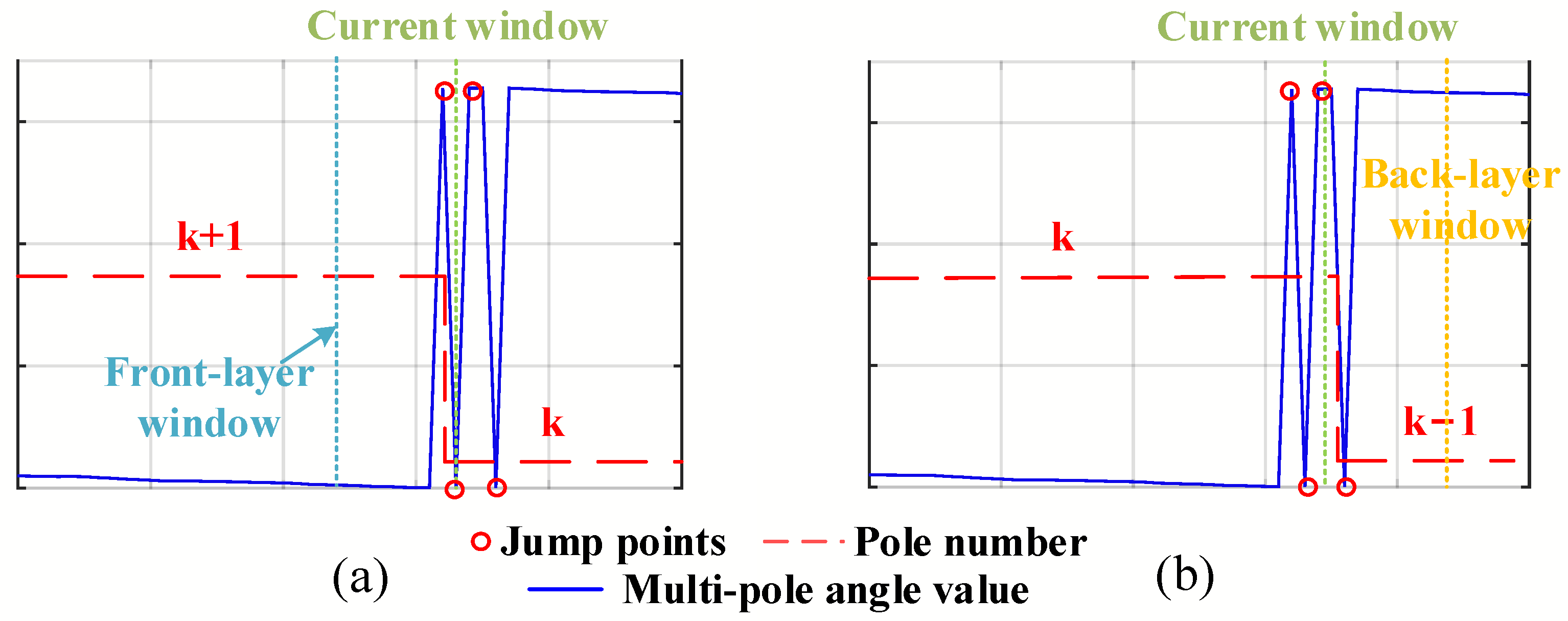
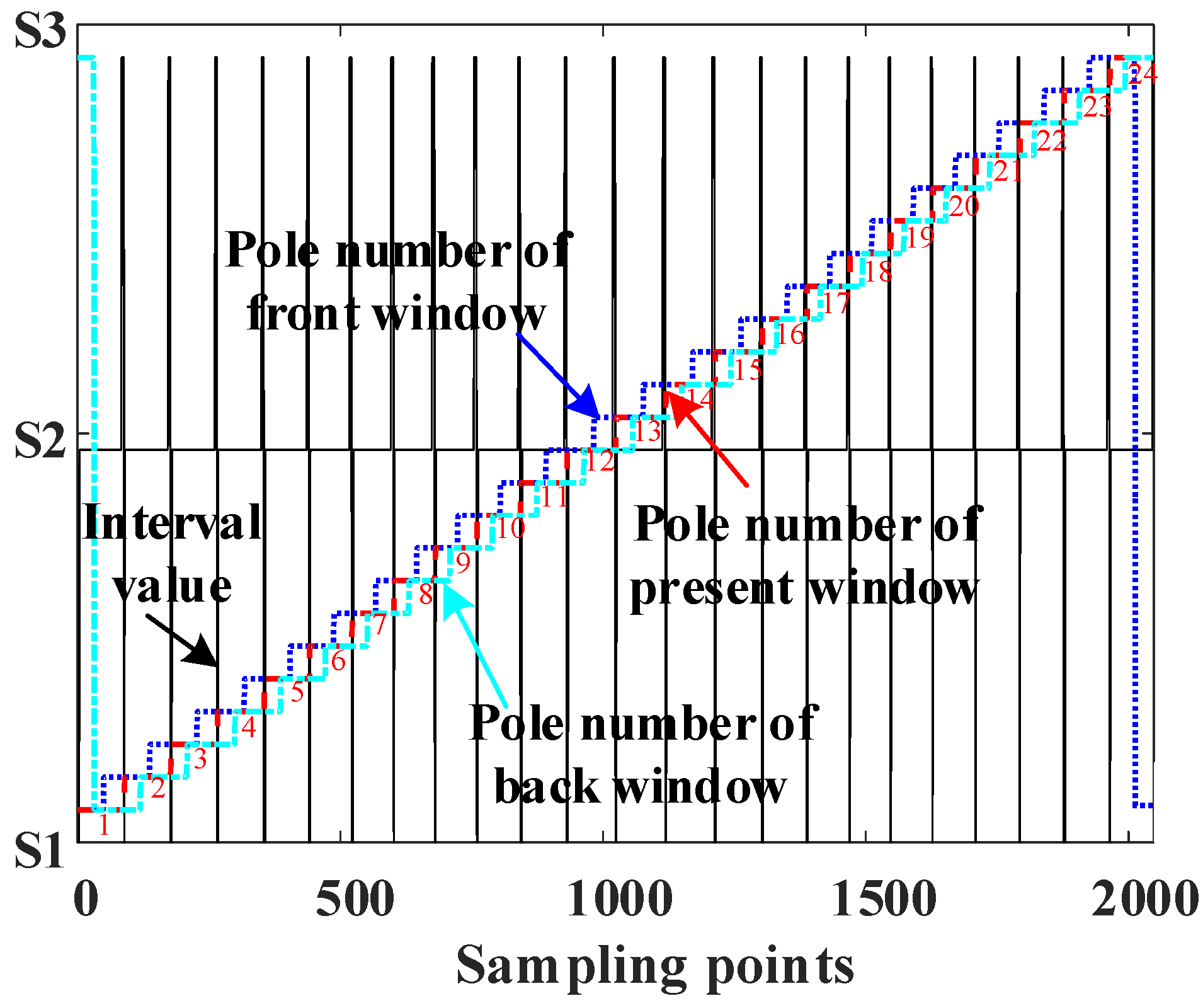
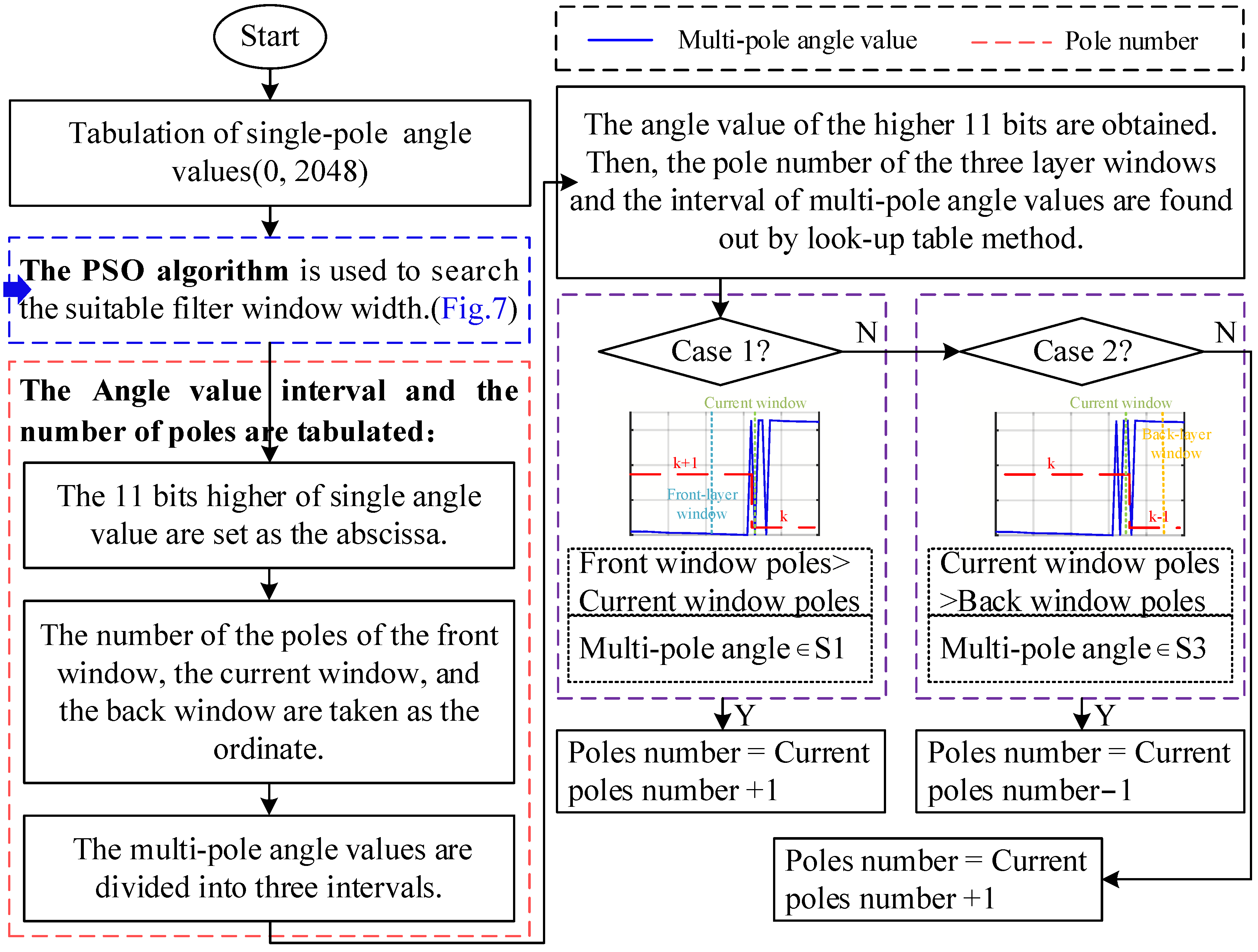
3.1. The Angle Subdivision Method Based on the Window Filter
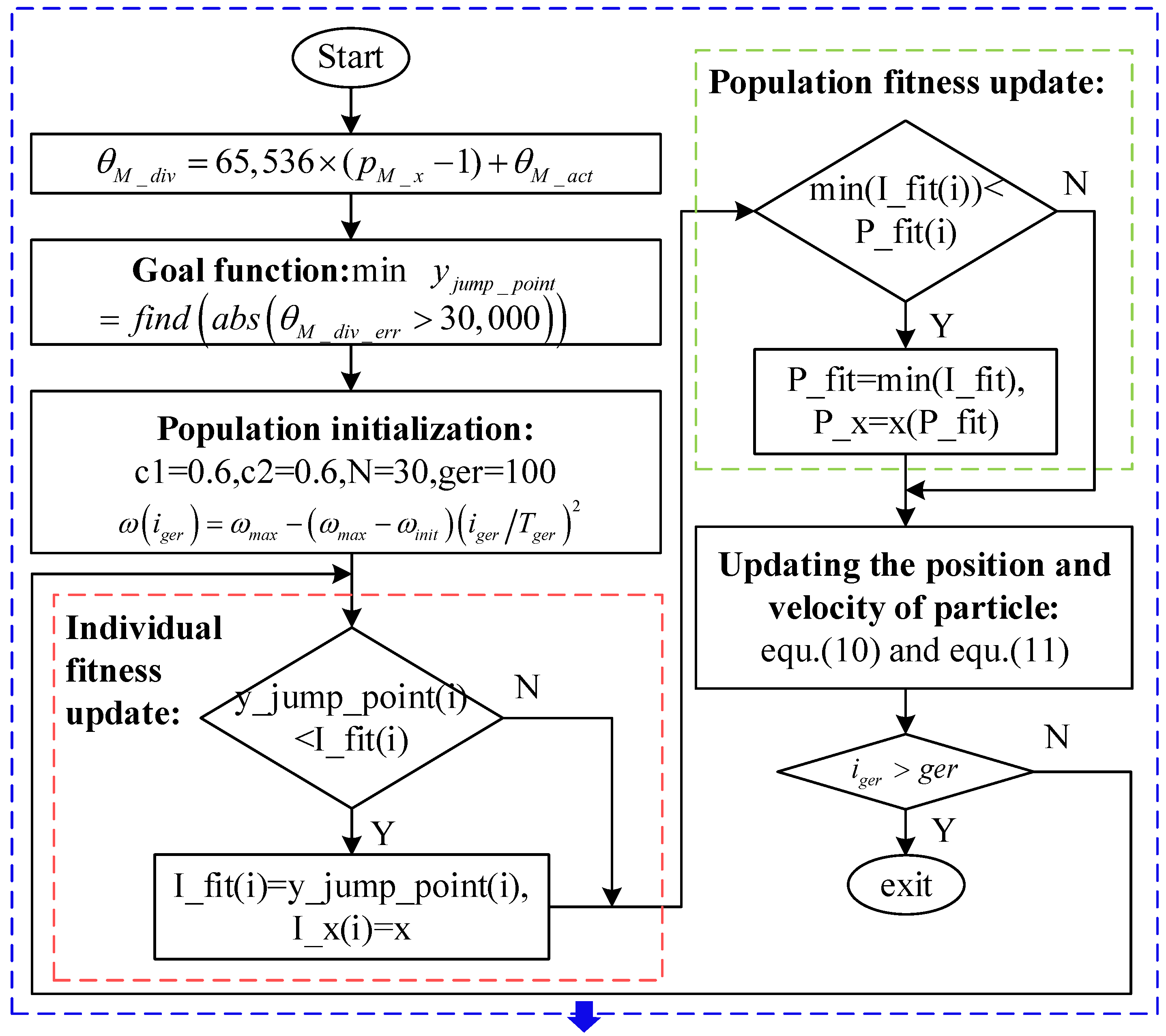
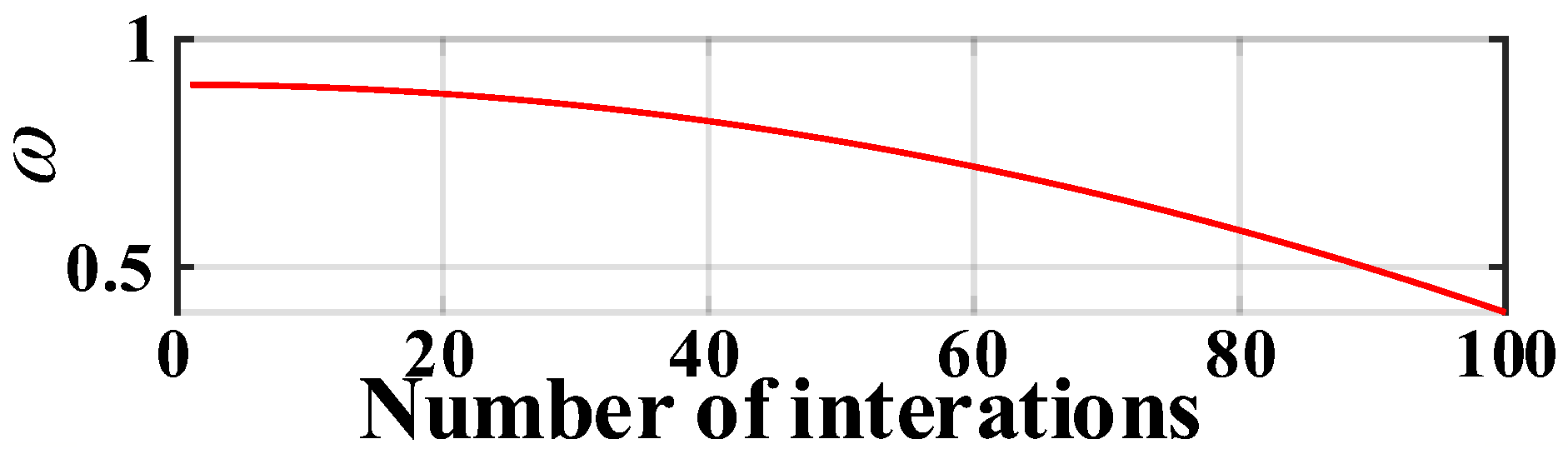
3.2. The Filtering Window Width Prediction Algorithm Based on IPSO
4. Linear Interpolation Compensation Tabulation Method Based on Virtual Cutting
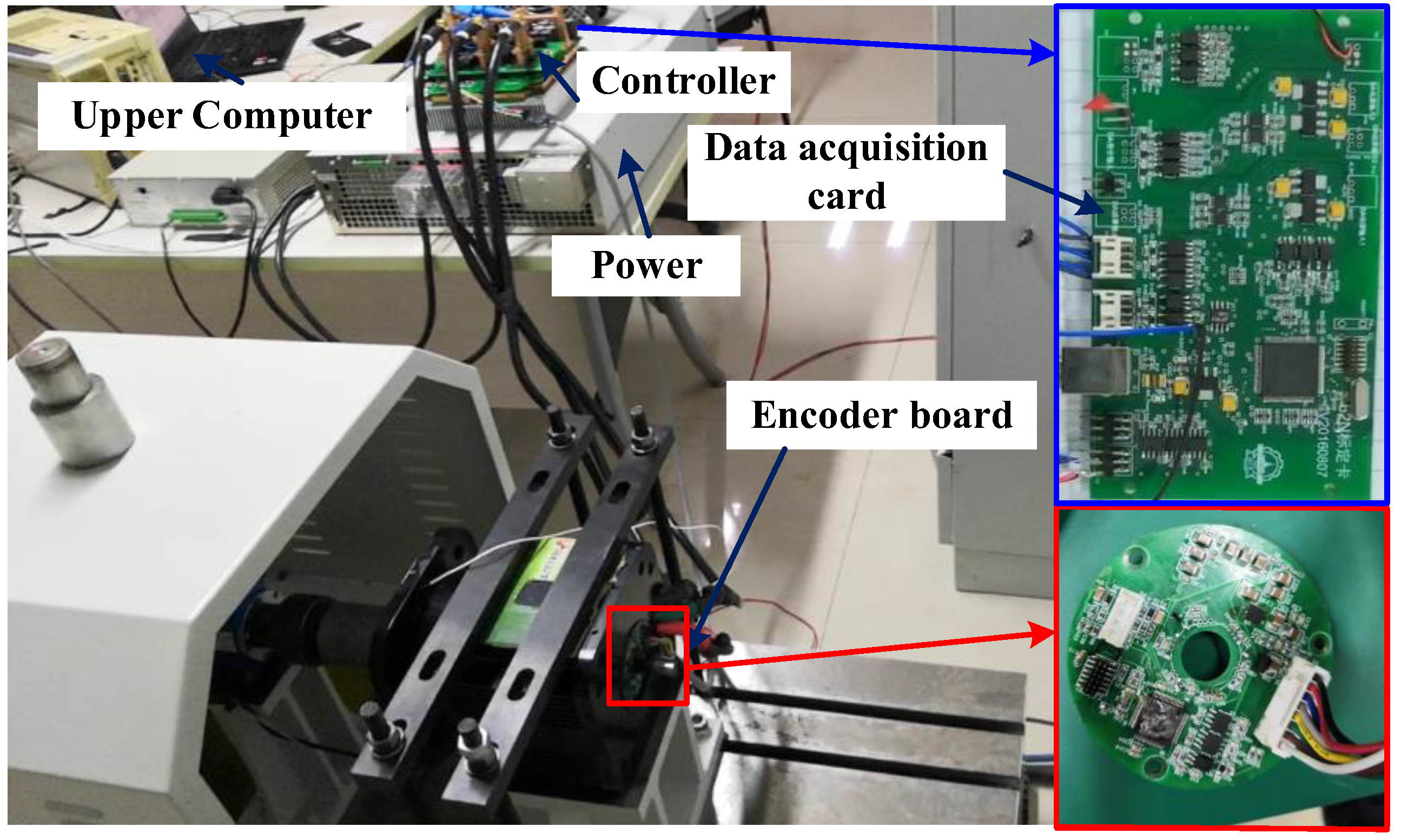
5. Experiment Analysis
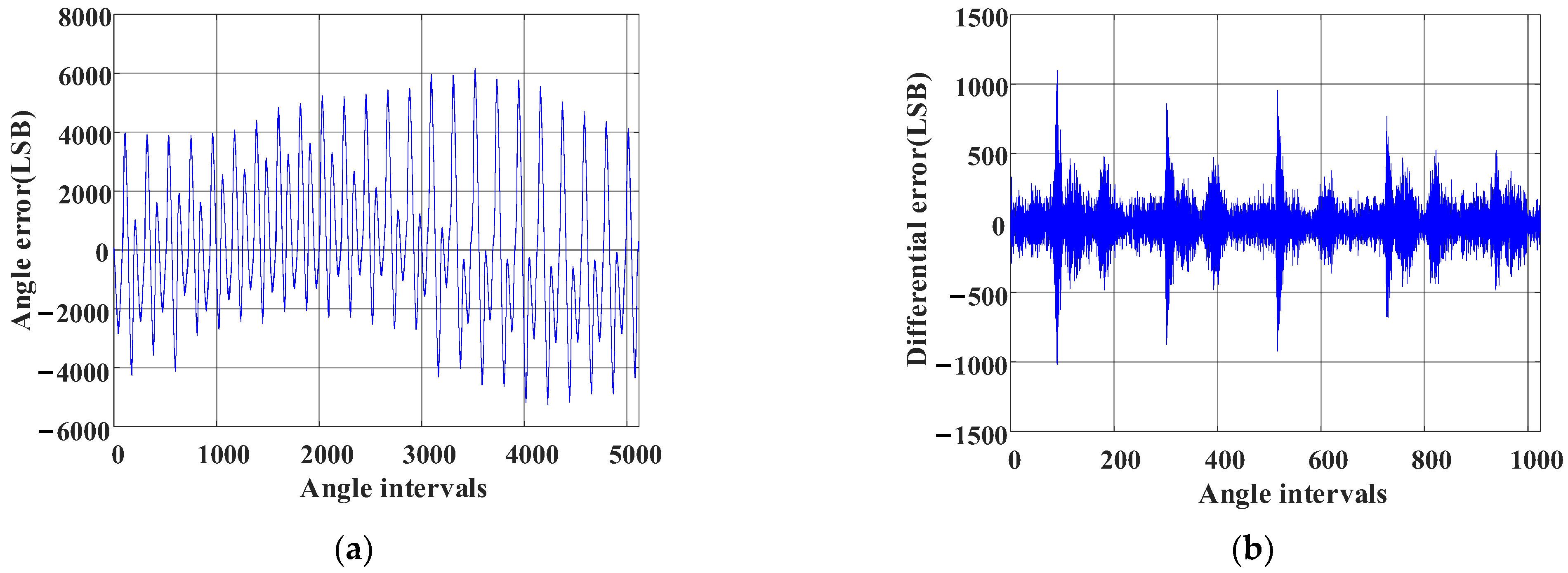
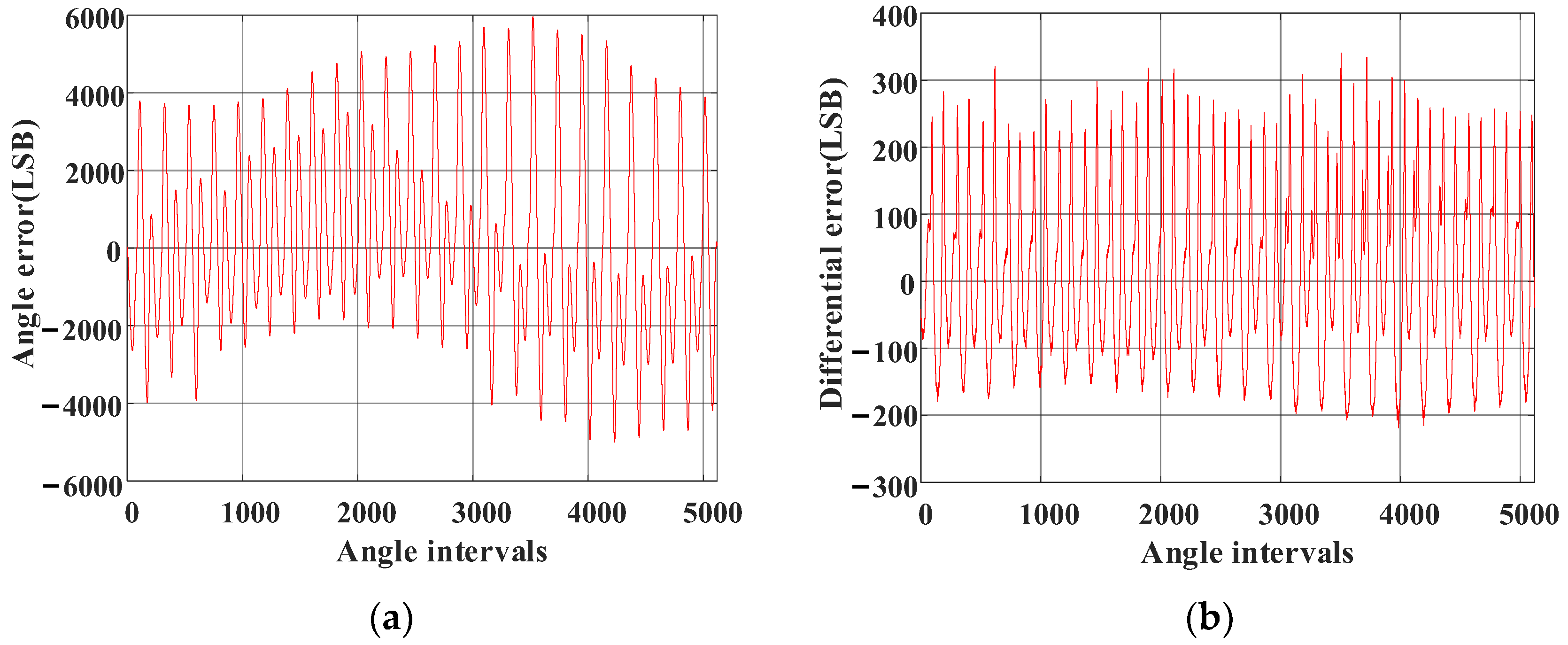
5.1. The Accuracy Test
5.2. The Resolution Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, Y.; Zheng, J.; Yu, X. Hybrid Terminal Sliding-Mode Observer Design Method for a Permanent-Magnet Synchronous Motor Control System. Trans. Ind. Electron. 2009, 56, 3424–3431. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.; Liu, L.Y. Speed-current single-loop control with overcurrent protection for PMSM based on time-varying nonlinear disturbance observer. Trans. Ind. Electron. 2021, 69, 179–189. [Google Scholar] [CrossRef]
- Bitriá, R.; Palacín, J. Optimal PID Control of a Brushed DC Motor with an Embedded Low-Cost Magnetic Quadrature Encoder for Improved Step Overshoot and Undershoot Responses in a Mobile Robot Application. Sensors 2022, 22, 7817. [Google Scholar]
- Jung, D.; Kim, S. A Passive Decomposition Based Robust Synchronous Motion Control of Multi-Motors and Experimental Verification. Sensors 2023, 23, 7603. [Google Scholar] [PubMed]
- Chen, Y.; Yang, M.; Xu, D.; Blaabjerg, F. A Novel Frequency Characteristic Model and Noise Shaping Method for Encoder-Based Speed Measurement in Motor Drive. In Proceedings of the ICPE 2019—ECCE Asia, Busan, Republic of Korea, 27–30 May 2019; pp. 1–6. [Google Scholar]
- Dalboni, M.; Soldati, A. Absolute Two-Tracked Optical Rotary Encoders Based on Vernier Method. IEEE Trans. Instrum. Meas. 2023, 72, 9501412. [Google Scholar] [CrossRef]
- Wang, S.; Wu, Z.; Peng, D.; Chen, S.; Zhang, Z.; Liu, S. Sensing Mechanism of a Rotary Magnetic Encoder Based on Time Grating. IEEE Sens. J. 2018, 18, 3677–3683. [Google Scholar]
- Chen, Y.C.; Lee, C.H.; Chou, M.J.; Shen, S.C. High-Precision Digital Rotary Encoder Based on Dot-Matrix Gratings. IEEE Photon. J. 2018, 10, 6801712. [Google Scholar]
- Hu, Y.; Zhang, S.; Yan, Y.; Wang, L.; Qian, X.; Yang, L. A Smart Electrostatic Sensor for Online Condition Monitoring of Power Transmission Belts. Trans. Ind. Electron. 2017, 64, 7313–7322. [Google Scholar]
- Sado, K.; Deguchi, Y.; Nagatsu, Y.; Hashimoto, H. Development of Magnetic Absolute Encoder Using Eccentric Structure: Improvement of Resolution by Multi-Polarization. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 1 July 2020; pp. 1–6. [Google Scholar]
- Takeyama, A.; Komatsuzaki, S.; Sado, K.; Nagastu, Y.; Hashimoto, H. Development of a Magnetic Absolute Encoder Using Eccentric Structure and Long Short-Term Memory. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar]
- Deguchi, Y.; Isshiki, G.; Sado, K.; Nagatsu, Y.; Ishii, S.; Hashimoto, H. Verification of Ultra-High Resolution Magnetic Absolute Encoder Using Eccentric Structure and Neural Network. In Proceedings of the 2020 IEEE/SICE International Symposium on System Integration (SII), Honolulu, HI, USA, 12–15 January 2020; pp. 848–853. [Google Scholar]
- Liu, Y.; Hao, M. Absolute multi-pole encoder with a simple structure based on an improved gray code to enhance the resolution. J. Chongqing Univ. 2023, 3, 181–187. [Google Scholar]
- Chen, B.; Chang, J.Y. Effect of Flattening Cracked Medium on Positioning Accuracy of a Linear Magnetic Encoder. IEEE Trans. Magn. 2020, 56, 6701207. [Google Scholar]
- Nguyen, H.X.; Tran, N.C.; Park, J.W.; Tran, N.; Jeon, J.W. Improving the Accuracy of Battery-Free Multiturn Absolute Magnetic Encoders by Using a Self-Referencing Lookup Table Algorithm. IEEE Trans. Instrum. Meas. 2019, 69, 5468–5477. [Google Scholar]
- Lara, J.; Xu, J.; Chandra, A. A Novel Algorithm Based on Polynomial Approximations for an Efficient Error Compensation of Magnetic Analog Encoders in PMSMs for EVs. IEEE Trans. Ind. Electron. 2016, 63, 3377–3388. [Google Scholar] [CrossRef]
- Nguyen, H.X.; Tran, N.C.; Park, J.W.; Jeon, J.W. An Adaptive Linear-Neuron-Based Third-Order PLL to Improve the Accuracy of Absolute Magnetic Encoders. IEEE Trans. Ind. Electron. 2019, 66, 4639–4649. [Google Scholar] [CrossRef]
- Hoang, H.V.; Jeon, J.W. An Efficient Approach to Correct the Signals and Generate High-Resolution Quadrature Pulses for Magnetic Encoders. IEEE Trans. Ind. Electron. 2011, 58, 3634–3646. [Google Scholar]
- Yu, S.; Liu, W.; Yang, X.; Shu, F. Quadrature Sinusoidal Signals Correction of Magnetic Encoders Via Radial Basis Function Neural Network and Adaptive Loop Shaping. IEEE Trans. Ind. Electron. 2022, 70, 11527–11534. [Google Scholar] [CrossRef]
- Montanari, A.N.; Oliveira, E. A Novel Analog Multisensor Design Based on Fuzzy Logic: A Magnetic Encoder Application. IEEE Sens. J. 2017, 17, 7096–7104. [Google Scholar] [CrossRef]
- Lin, Y.-J.; Chou, P.-H.; Yang, S.-C. High-Resolution Permanent Magnet Drive Using Separated Observers for Acceleration Estimation and Control. Sensors 2022, 22, 725. [Google Scholar] [CrossRef]
- Ren, Z.; Zhang, A.; Wen, C.; Feng, Z. A Scatter Learning Particle Swarm Optimization Algorithm for Multimodal Problems. IEEE Trans. Cybern. 2014, 44, 1127–1140. [Google Scholar]
- Wang, S.C.; Liu, Y.H. A PSO-Based Fuzzy-Controlled Searching for the Optimal Charge Pattern of Li-Ion Batteries. IEEE Trans. Ind. Electron. 2015, 62, 2983–2993. [Google Scholar] [CrossRef]
- Deligkaris, K.V.; Zaharis, Z.D.; Kampitaki, D.G.; Goudos, S.K.; Rekanos, I.T.; Spasos, M.N. Thinned Planar Array Design Using Boolean PSO With Velocity Mutation. IEEE Trans. Magn. 2009, 45, 1490–1493. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, Y.; Che, L.; Zhou, M. Moving-Distance-Minimized PSO for Mobile Robot Swarm. IEEE Trans. Cybern. 2022, 52, 9871–9881. [Google Scholar] [PubMed]
- Wang, L.; Li, P.; Qiao, Y.; Hao, S.; Hao, M. Study on high precision magnetic encoder based on the arctangent cross-intervals tabulation method. Austral. J. Electr. Electron. Eng. 2016, 13, 167–173. [Google Scholar]
- Wang, L.; Zhang, Y.; Hao, S.; Song, B.; Hao, M.; Tang, Z. Study on high precision magnetic encoder based on PMSM sensorless control. Sens. Rev. 2016, 36, 267–276. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Technologies | Merits |
|---|---|---|
| [11] | Long Short-Term Memory (LSTM) | Decreasing angle error via fewer sensors |
| [15] | Self-referencing lookup table (LUT) | Eliminating the external disturbance effects |
| [16] | Type-2 phase-locked loop (PLL) | Using little memory, with total position error of ±0.2° |
| [17] | Adaptive Linear-Neuron and a third-order phase-locked loop (ALN-PLL) | Reducing noise and eliminating dc-error, and rejecting the disturbances |
| [18] | Digital phase-locked loop (AADPLL) | Extracting high-order sinusoids |
| Motor Model | Rated Power | Bus Voltage | Bus Current |
|---|---|---|---|
| PM-15 | 15 kW | 80 V | 400 A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wei, X.; Liang, P.; Zhang, Y.; Hao, S. A Novel Angle Segmentation Method for Magnetic Encoders Based on Filtering Window Adaptive Adjustment Using Improved Particle Swarm Optimization. Sensors 2023, 23, 8695. https://doi.org/10.3390/s23218695
Wang L, Wei X, Liang P, Zhang Y, Hao S. A Novel Angle Segmentation Method for Magnetic Encoders Based on Filtering Window Adaptive Adjustment Using Improved Particle Swarm Optimization. Sensors. 2023; 23(21):8695. https://doi.org/10.3390/s23218695
Chicago/Turabian StyleWang, Lei, Xin Wei, Pengbo Liang, Yongde Zhang, and Shuanghui Hao. 2023. "A Novel Angle Segmentation Method for Magnetic Encoders Based on Filtering Window Adaptive Adjustment Using Improved Particle Swarm Optimization" Sensors 23, no. 21: 8695. https://doi.org/10.3390/s23218695