
Induction Motor Stator Winding Inter-Tern Short Circuit Fault Detection Based on Start-Up Current Envelope Energy
 , and
, and
Abstract
:1. Introduction
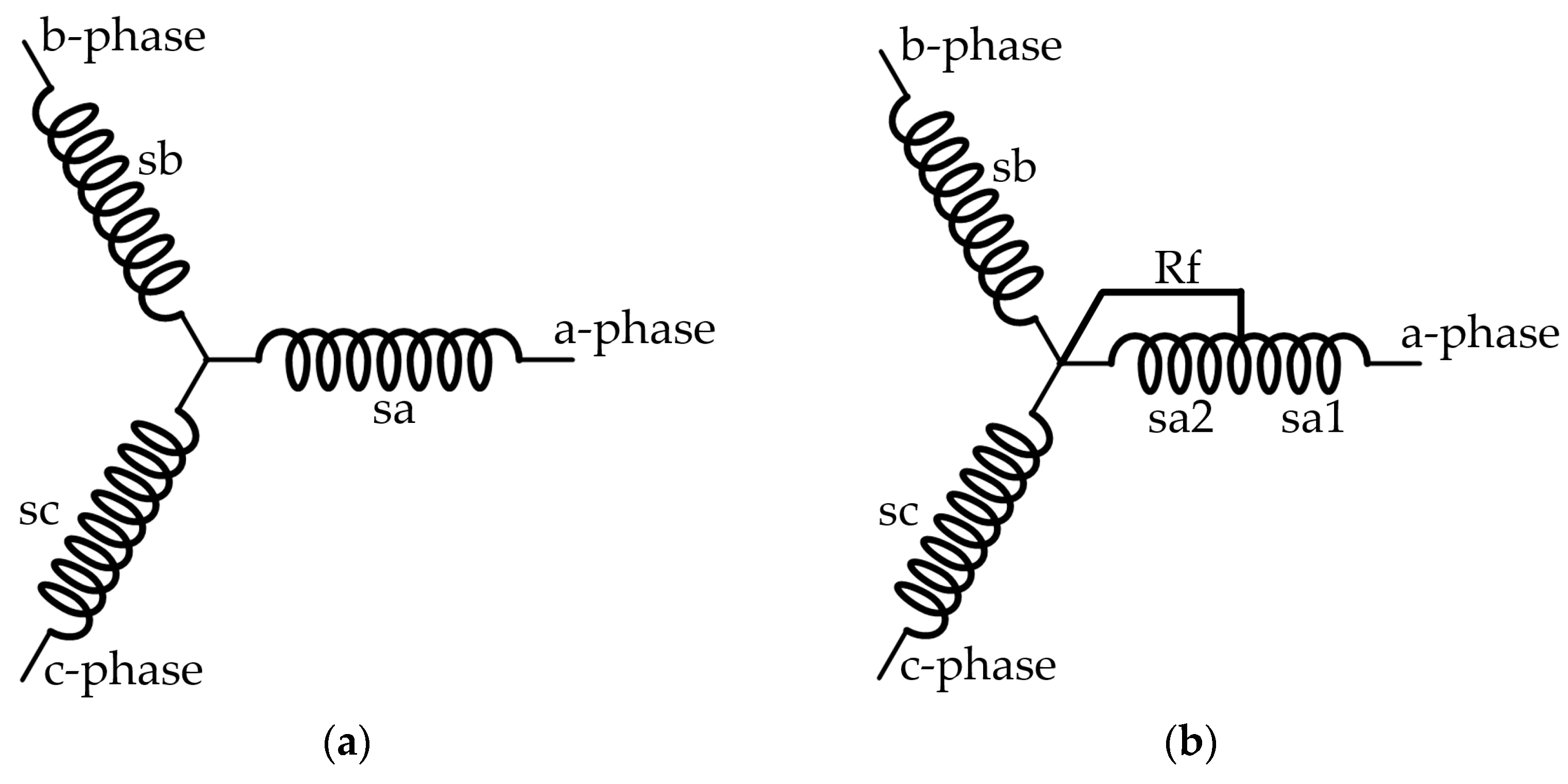
2. Mathematical Model of Induction Motor ITSC Fault
- The constant temperature of the motor;
- The three-phase winding is symmetrical, and the magnetic potential is distributed sinusoidal along the air gap;
- Unsaturation of the magnetic circuit;
- Without consideration of the hysteresis effect, the diaphragm effect, and the eddy current effect.
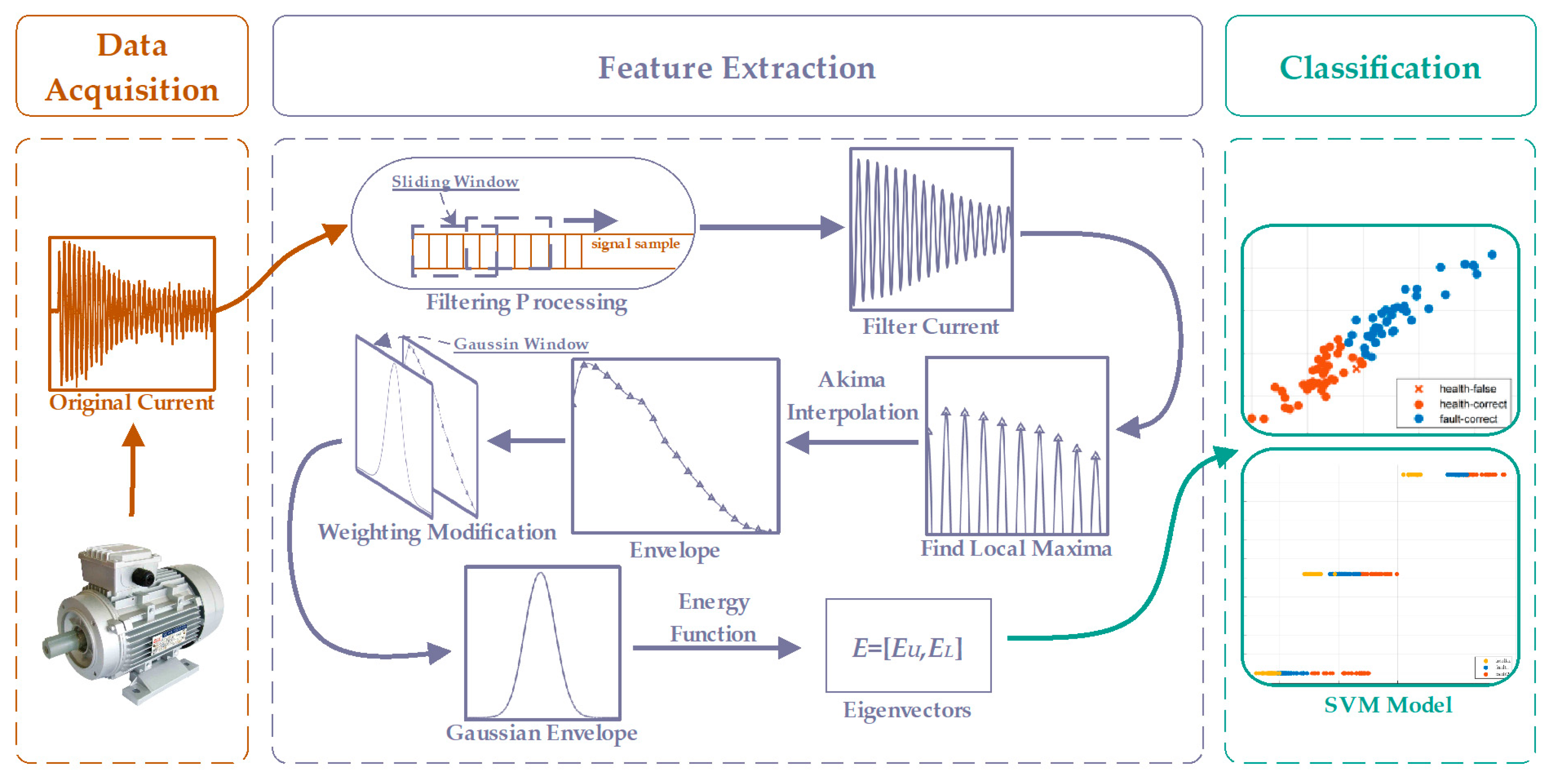
3. Proposed Algorithm
3.1. Sliding-Average Filter
3.2. Envelope Extraction
- Calculate all the original signal’s maximum and minimum coordinate points.
- Use the maximum and minimum coordinate points to obtain the upper and lower envelope through the interpolation function.
- The original data are (, )(), assuming that the curve meets . Meanwhile, any two adjacent data points are approximated using a cubic polynomial.
- Curve needs to meet four conditions:
- 3.
- The expression for the cubic polynomial is as follows:
3.3. Gaussian Window Weighting and Calculation of Envelope Energy
3.4. Support Vector Machine
- Assuming the training dataset is and linearly separable, where , are eigenvectors of dimension , and is the class of the sample, when , it is a negative example, and when , it is a positive example.
- Assuming the classification hyperplane is , in order to maximize the geometric margin between the data points and the classification hyperplane, the Lagrange method is introduced to solve the optimization problem, which can be expressed as
- 3.
- After obtaining the optimal solution , and selecting a positive component of , the parameters of the hyperplane can be calculated as follows:
- 4.
- The decision function can be constructed as
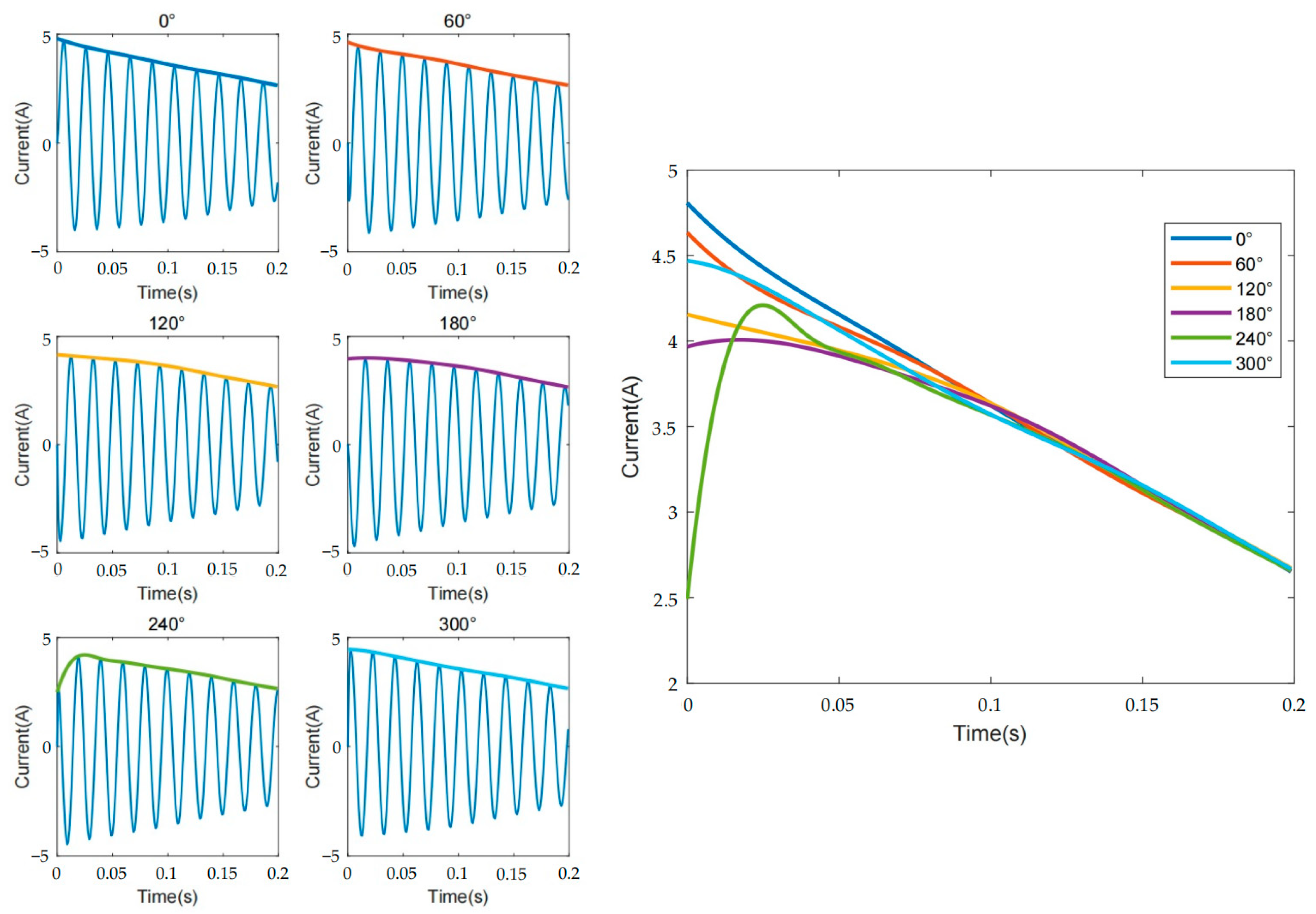
4. Mathematical Simulation
5. Results and Discussion
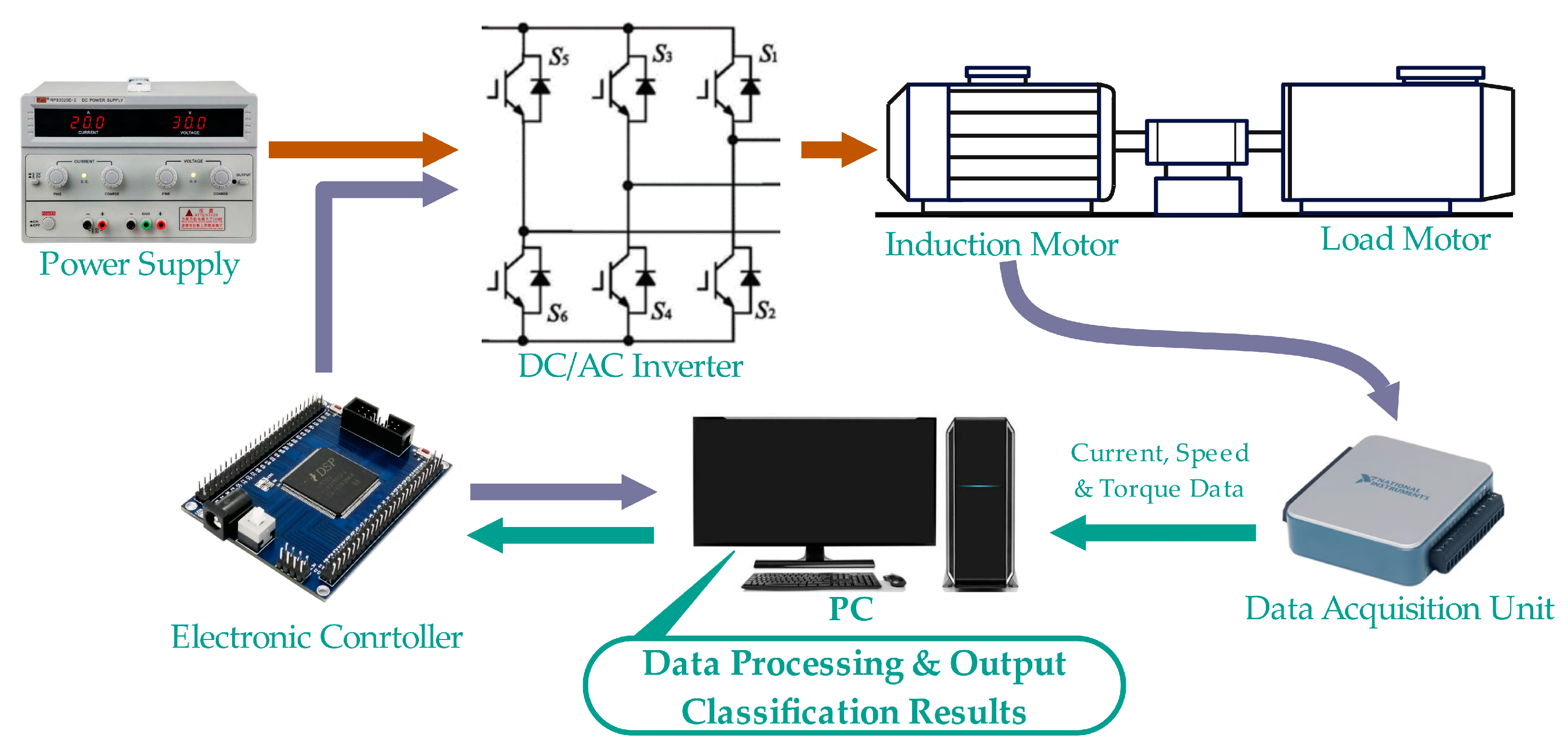
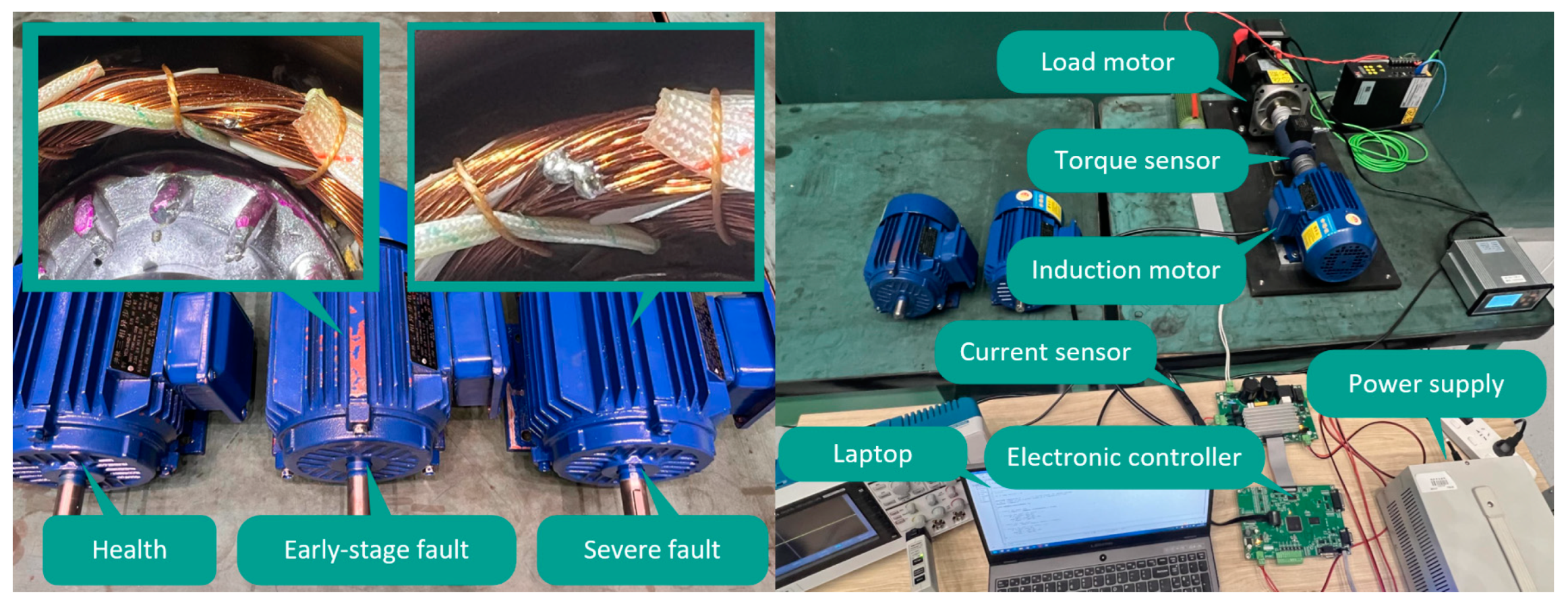
5.1. Experiment Setup
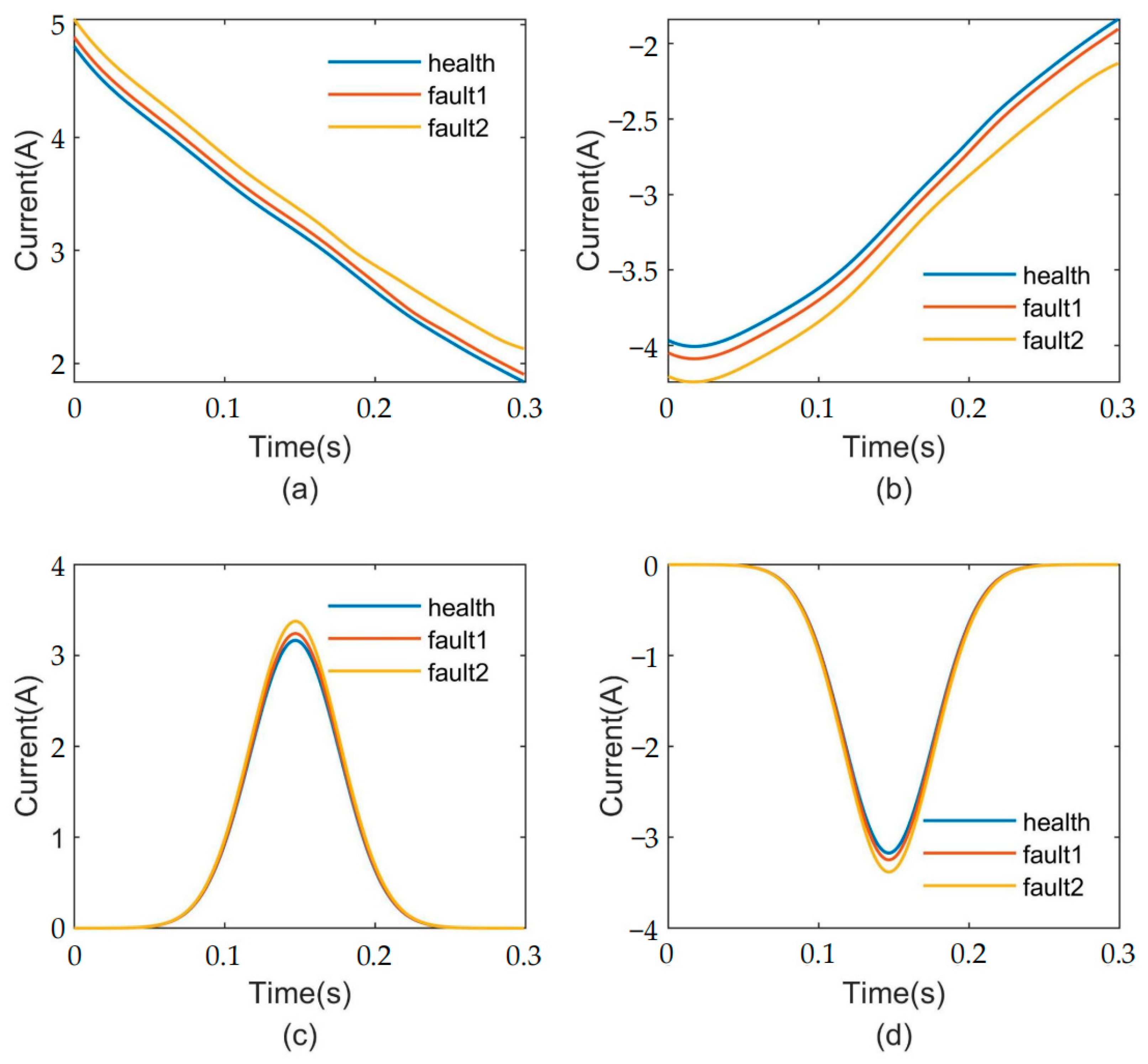
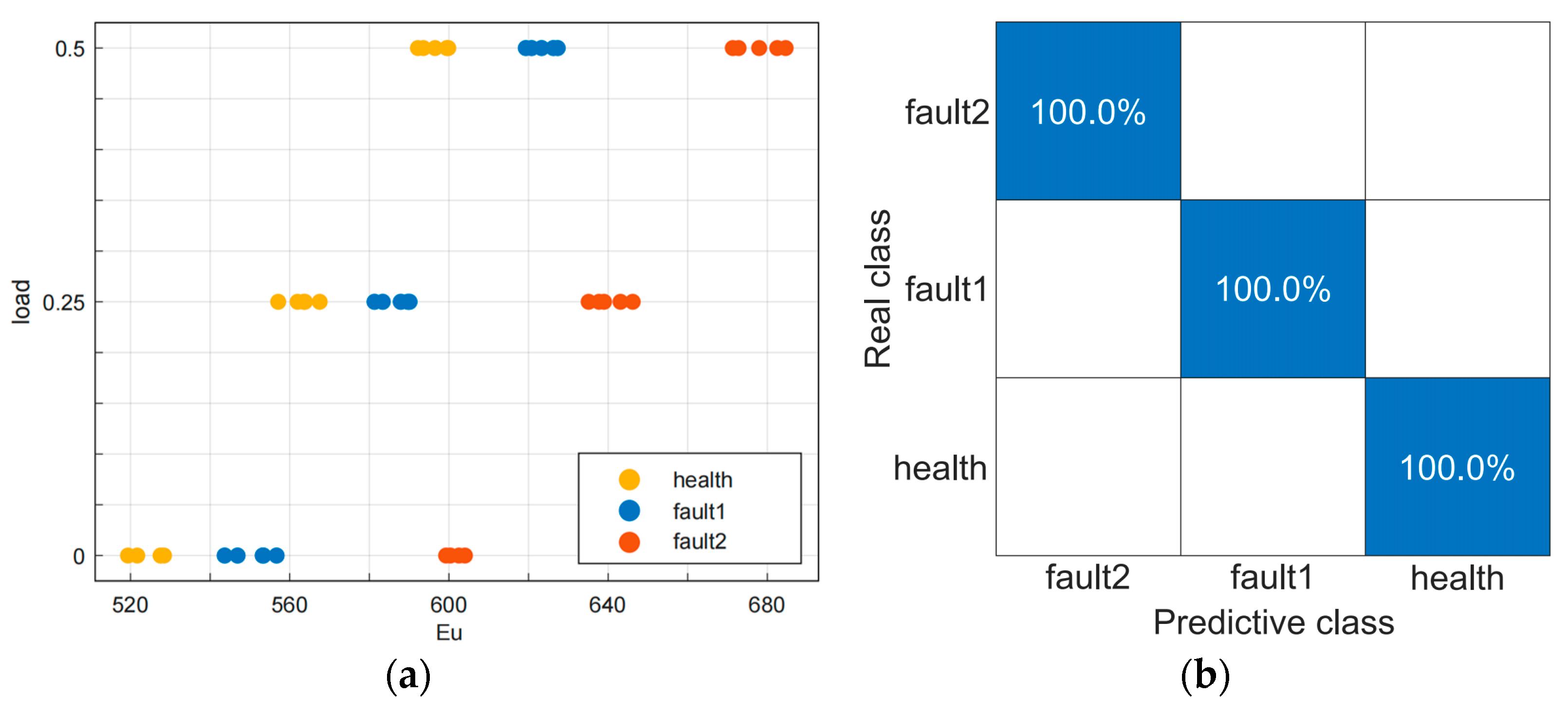
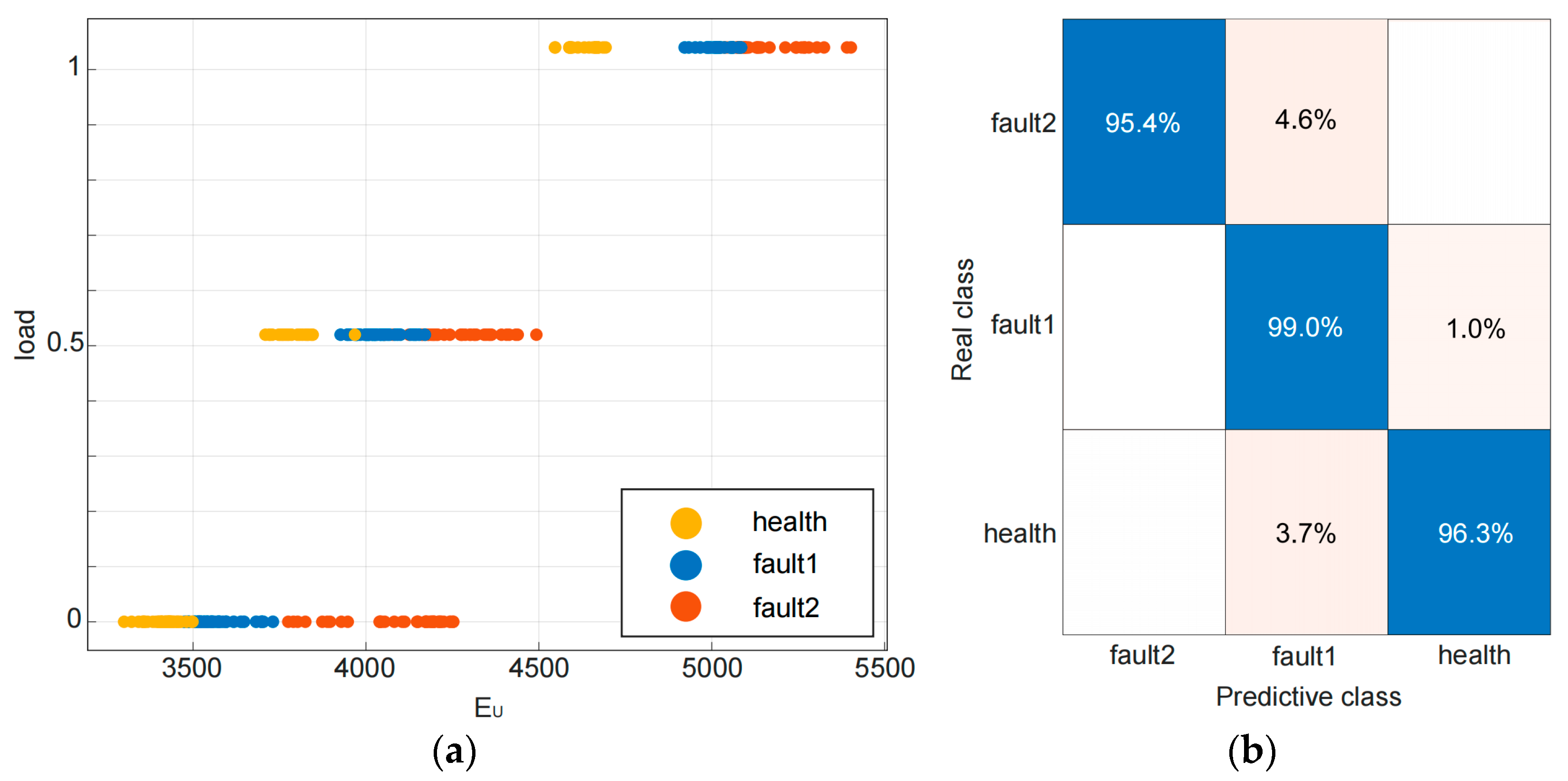
5.2. Results Analysis
5.3. Discussion
5.3.1. Classification Performance Analysis
5.3.2. Limitations of the Proposed Method
- The instability of the voltage source will have a specific impact on the motor’s start-up current, resulting in a decrease in the fault detection accuracy of the proposed method. Therefore, in future research, the stability characteristics of the voltage need to be considered.
- When ITSC faults occur in other phases, they will affect the starting current of the measured phase, resulting in misjudgment of the location of the short circuit fault. This means that measuring single-phase current cannot achieve the position determination of ITSC faults.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gundewar, S.K.; Kane, P.V. Condition Monitoring and Fault Diagnosis of Induction Motor. J. Vib. Eng. Technol. 2021, 9, 643–674. [Google Scholar] [CrossRef]
- Kliman, G.B.; Premerlani, W.J.; Koegl, R.A.; Hoeweler, D. A new approach to on-line turn fault detection in AC motors. In Proceedings of the IAS ′96—Conference Record of the 1996 IEEE Industry Applications Conference, Thirty-First IAS Annual Meeting, San Diego, CA, USA, 6–10 October 1996; pp. 687–693. [Google Scholar]
- Kim, M.-C.; Lee, J.-H.; Wang, D.-H.; Lee, I.-S. Induction Motor Fault Diagnosis Using Support Vector Machine, Neural Networks, and Boosting Methods. Sensors 2023, 23, 2585. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.H.; Lee, J.J.; Kwon, B.H. Online diagnosis of induction motors using MCSA. IEEE Trans. Ind. Electron. 2006, 53, 1842–1852. [Google Scholar] [CrossRef]
- Cusidó, J.; Romeral, L.; Ortega, J.A.; Garcia, A.; Riba, J. Signal Injection as a Fault Detection Technique. Sensors 2011, 11, 3356–3380. [Google Scholar] [CrossRef] [PubMed]
- Bouzida, A.; Touhami, O.; Ibtiouen, R.; Belouchrani, A.; Fadel, M.; Rezzoug, A. Fault Diagnosis in Industrial Induction Machines Through Discrete Wavelet Transform. IEEE Trans. Ind. Electron. 2011, 58, 4385–4395. [Google Scholar] [CrossRef]
- Ciszewski, T.; Gelman, L.; Ball, A.; Abdullahi, A.O.; Jamabo, B.; Ziolko, M. Novel Investigation of Higher Order Spectral Technologies for Fault Diagnosis of Motor-Based Rotating Machinery. Sensors 2023, 23, 3731. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, X.; Zhou, Y. Deep PCA-Based Incipient Fault Diagnosis and Diagnosability Analysis of High-Speed Railway Traction System via FNR Enhancement. Machines 2023, 11, 475. [Google Scholar] [CrossRef]
- Kafeel, A.; Aziz, S.; Awais, M.; Khan, M.A.; Afaq, K.; Idris, S.A.; Alshazly, H.; Mostafa, S.M. An Expert System for Rotating Machine Fault Detection Using Vibration Signal Analysis. Sensors 2021, 21, 7587. [Google Scholar] [CrossRef]
- Misra, S.; Kumar, S.; Sayyad, S.; Bongale, A.; Jadhav, P.; Kotecha, K.; Abraham, A.; Gabralla, L.A. Fault Detection in Induction Motor Using Time Domain and Spectral Imaging-Based Transfer Learning Approach on Vibration Data. Sensors 2022, 22, 8210. [Google Scholar] [CrossRef]
- Pham, M.T.; Kim, J.-M.; Kim, C.H. Deep Learning-Based Bearing Fault Diagnosis Method for Embedded Systems. Sensors 2020, 20, 6886. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- Glowacz, A. Fault diagnosis of single-phase induction motor based on acoustic signals. Mech. Syst. Signal Process. 2019, 117, 65–80. [Google Scholar] [CrossRef]
- Alvarado-Hernandez, A.I.; Zamudio-Ramirez, I.; Jaen-Cuellar, A.Y.; Osornio-Rios, R.A.; Donderis-Quiles, V.; Antonino-Daviu, J.A. Infrared Thermography Smart Sensor for the Condition Monitoring of Gearbox and Bearings Faults in Induction Motors. Sensors 2022, 22, 6075. [Google Scholar] [CrossRef]
- Singh, G.; Anil Kumar, T.C.; Naikan, V.N.A. Induction motor inter turn fault detection using infrared thermographic analysis. Infrared Phys. Technol. 2016, 77, 277–282. [Google Scholar] [CrossRef]
- Singh, G.; Naikan, V.N.A. Infrared thermography based diagnosis of inter-turn fault and cooling system failure in three phase induction motor. Infrared Phys. Technol. 2017, 87, 134–138. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.A.; Riera-Guasp, M.; Folch, J.R.; Palomares, M.P.M. Validation of a new method for the diagnosis of rotor bar failures via wavelet transform in industrial induction machines. IEEE Trans. Ind. Appl. 2006, 42, 990–996. [Google Scholar] [CrossRef]
- Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Burriel-Valencia, J.; Riera-Guasp, M. Fault Diagnosis in the Slip–Frequency Plane of Induction Machines Working in Time-Varying Conditions. Sensors 2020, 20, 3398. [Google Scholar] [CrossRef]
- Burriel-Valencia, J.; Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Pineda-Sanchez, M. Fault Diagnosis of Induction Machines in a Transient Regime Using Current Sensors with an Optimized Slepian Window. Sensors 2018, 18, 146. [Google Scholar] [CrossRef]
- Zhengping, Z.; Zhen, R.; Wenying, H. A novel detection method of motor broken rotor bars based on wavelet ridge. IEEE Trans. Energy Convers. 2003, 18, 417–423. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.; Riera-Guasp, M.; Pons-Llinares, J.; Park, J.; Lee, S.B.; Yoo, J.; Kral, C. Detection of Broken Outer-Cage Bars for Double-Cage Induction Motors Under the Startup Transient. IEEE Trans. Ind. Appl. 2012, 48, 1539–1548. [Google Scholar] [CrossRef]
- Zaparoli, I.O.; Rabelo Baccarini, L.M.; Lamim Filho, P.C.M.; Batista, F.B. Transient envelope current analysis for inter-turn short-circuit detection in induction motor stator. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 97. [Google Scholar] [CrossRef]
- Koti, H.N.; Valipoor, Z.; Chen, H.; Demerdash Nabeel, A.O. On Shortening the Numerical Transient in Time-Stepping Finite Element Analysis of Induction Motor Under Inter-Turn Short Circuit Fault Faults. In Proceedings of the 2021 IEEE Energy Conversion Congress and Exposition (ECCE), Virtual, 10–14 October 2021; pp. 3982–3986. [Google Scholar]
- Gyftakis, K.N.; Spyropoulos, D.V.; Mitronikas, E.D. Advanced Detection of Rotor Electrical Faults in Induction Motors at Start-Up. IEEE Trans. Energy Convers. 2021, 36, 1101–1109. [Google Scholar] [CrossRef]
- Pineda-Sanchez, M.; Riera-Guasp, M.; Antonino-Daviu, J.A.; Roger-Folch, J.; Perez-Cruz, J.; Puche-Panadero, R. Diagnosis of Induction Motor Faults in the Fractional Fourier Domain. IEEE Trans. Instrum. Meas. 2010, 59, 2065–2075. [Google Scholar] [CrossRef]
- Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Perez-Ramirez, C.A.; Camarena-Martinez, D.; Garcia-Perez, A.; Romero-Troncoso, R.J. Fractal dimension and fuzzy logic systems for broken rotor bar detection in induction motors at start-up and steady-state regimes. Meas. Sci. Technol. 2017, 28, 075001. [Google Scholar] [CrossRef]
- Boushaba, A.; Cauet, S.; Chamroo, A.; Etien, E.; Rambault, L. Comparative Study between Physics-Informed CNN and PCA in Induction Motor Broken Bars MCSA Detection. Sensors 2022, 22, 9494. [Google Scholar] [CrossRef]
- Rodriguez-Donate, C.; Romero-Troncoso, R.J.; Cabal-Yepez, E.; Garcia-Perez, A.; Osornio-Rios, R.A. Wavelet-based general methodology for multiple fault detection on induction motors at the startup vibration transient. J. Vib. Control. 2010, 17, 1299–1309. [Google Scholar] [CrossRef]
- Sintoni, M.; Macrelli, E.; Bellini, A.; Bianchini, C. Condition Monitoring of Induction Machines: Quantitative Analysis and Comparison. Sensors 2023, 23, 1046. [Google Scholar] [CrossRef]
- Tallam, R.M.; Habetler, T.G.; Harley, R.G. Transient model for induction machines with stator winding turn faults. IEEE Trans. Ind. Appl. 2002, 38, 632–637. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.L.C.; Shih, H.H.; Zheng, Q.N.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A-Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Mauricio, A.; Gryllias, K. Cyclostationary-based Multiband Envelope Spectra Extraction for bearing diagnostics: The Combined Improved Envelope Spectrum. Mech. Syst. Signal Process. 2021, 149, 107150. [Google Scholar] [CrossRef]
- Guo, L.; Chen, J.; Li, X.L. Rolling Bearing Fault Classification Based on Envelope Spectrum and Support Vector Machine. J. Vib. Control. 2009, 15, 1349–1363. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, D.J.; Cheng, J.S. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurement 2007, 40, 943–950. [Google Scholar] [CrossRef]
- Ming, Y.; Chen, J.; Dong, G.M. Weak fault feature extraction of rolling bearing based on cyclic Wiener filter and envelope spectrum. Mech. Syst. Signal Process. 2011, 25, 1773–1785. [Google Scholar] [CrossRef]
- Akima, H. A new method of interpolation and smooth curve fitting based on local procedures. J. ACM 1970, 17, 589–602. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Frequency | 50 |
| Rated voltage | 220 |
| Number of poles | 2 |
| Stator resistance | 20.63 |
| Rotor resistance | 20.69 |
| Stator leakage inductance | 0.0151 |
| Rotor leakage inductance | 0.0141 |
| Mutual inductance between stator and rotor | 0.347 |
| Inertia | 0.0066 |
| Type | Load | ||||||
|---|---|---|---|---|---|---|---|
| No Load | 0.25 Nm | 0.5 Nm | |||||
| Upper Energy | Lower Energy | Upper Energy | Lower Energy | Upper Energy | Lower Energy | ||
| Health | 0° | 527.553 | 530.990 | 563.514 | 567.522 | 599.831 | 604.131 |
| 60° | 519.365 | 521.687 | 555.176 | 557.106 | 592.212 | 593.567 | |
| 120° | 528.407 | 527.650 | 563.809 | 561.980 | 599.486 | 596.512 | |
| 180° | 530.990 | 527.553 | 567.522 | 563.514 | 604.131 | 599.831 | |
| 240° | 521.687 | 519.365 | 557.106 | 555.176 | 593.567 | 592.212 | |
| 300° | 527.650 | 528.407 | 561.980 | 563.809 | 596.512 | 599.486 | |
| Fault 1 | 0° | 553.208 | 556.694 | 590.093 | 594.171 | 627.316 | 631.706 |
| 60° | 543.654 | 546.890 | 581.301 | 583.363 | 619.326 | 620.762 | |
| 120° | 553.397 | 552.692 | 589.689 | 587.894 | 626.246 | 623.280 | |
| 180° | 556.694 | 553.208 | 594.171 | 590.093 | 631.706 | 627.316 | |
| 240° | 546.890 | 543.654 | 583.363 | 581.301 | 620.762 | 619.326 | |
| 300° | 552.692 | 553.397 | 587.894 | 589.689 | 623.280 | 626.246 | |
| Fault 2 | 0° | 600.357 | 604.015 | 638.967 | 643.109 | 677.946 | 682.491 |
| 60° | 599.295 | 602.505 | 635.106 | 637.718 | 671.325 | 672.771 | |
| 120° | 607.993 | 607.472 | 646.167 | 644.522 | 684.601 | 681.725 | |
| 180° | 604.015 | 600.357 | 643.109 | 638.967 | 682.491 | 677.946 | |
| 240° | 602.505 | 599.295 | 637.718 | 635.106 | 672.771 | 671.325 | |
| 300° | 607.472 | 607.993 | 644.522 | 646.167 | 681.725 | 684.601 | |
| Method | Accuracy (Validation) | Training Time |
|---|---|---|
| Proposed Features + SVM | 98.8% | 0.5395 s |
| Proposed Features + LR | 96.2% | 0.8597 s |
| Proposed Features + KNN | 97.5% | 0.6569 s |
| Proposed Features + NN | 98.8% | 1.2627 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Shen, J.; Xu, G.; Chi, C.; Feng, Q.; Zhou, Y.; Deng, Y.; Wen, H. Induction Motor Stator Winding Inter-Tern Short Circuit Fault Detection Based on Start-Up Current Envelope Energy. Sensors 2023, 23, 8581. https://doi.org/10.3390/s23208581
Chen L, Shen J, Xu G, Chi C, Feng Q, Zhou Y, Deng Y, Wen H. Induction Motor Stator Winding Inter-Tern Short Circuit Fault Detection Based on Start-Up Current Envelope Energy. Sensors. 2023; 23(20):8581. https://doi.org/10.3390/s23208581
Chicago/Turabian StyleChen, Liting, Jianhao Shen, Gang Xu, Cheng Chi, Qiaohui Feng, Yang Zhou, Yuanzhi Deng, and Huajie Wen. 2023. "Induction Motor Stator Winding Inter-Tern Short Circuit Fault Detection Based on Start-Up Current Envelope Energy" Sensors 23, no. 20: 8581. https://doi.org/10.3390/s23208581