
An Intelligent Framework for Cyber–Physical Satellite System and IoT-Aided Aerial Vehicle Security Threat Detection
 , , , , , ,
, , , , , ,
Abstract
:1. Introduction
- The study discusses the most recent developments in drone safety, security, and privacy, as well as the Internet of Drones (IoD), highlighting the need for secure drone networks that are resistant against hacking and other intrusions.
- The proposed framework incorporates advanced machine learning models into the design and structure of IoT-aided drones to prevent cyber-security vulnerabilities. This integration improves the flexibility and security of the technology.
- This research work involves the construction of a new dataset performed by merging a drone dataset and two benchmark datasets (KDD CUP 99 and NSL-KDD). This new dataset serves as a valuable resource for further analysis and evaluation of drone-related algorithms and techniques.
- The proposed strategy surpasses previous algorithms by achieving 99.89% accuracy on the drone dataset and 91.64% on the merged dataset. This demonstrates the effectiveness of the intelligent framework in enhancing security and resilience in cyber–physical satellite systems and IoT-aided aerial vehicle systems.
- The intelligent framework presented in this research article offers a means to improve the security and resilience of various systems, including cyber–physical systems, satellite systems, and IoT-aided aerial vehicle systems.
2. Related Work
2.1. Threats to Drone Security
2.2. Implementation of Drone Security with Machine Learning
3. Drone Architecture
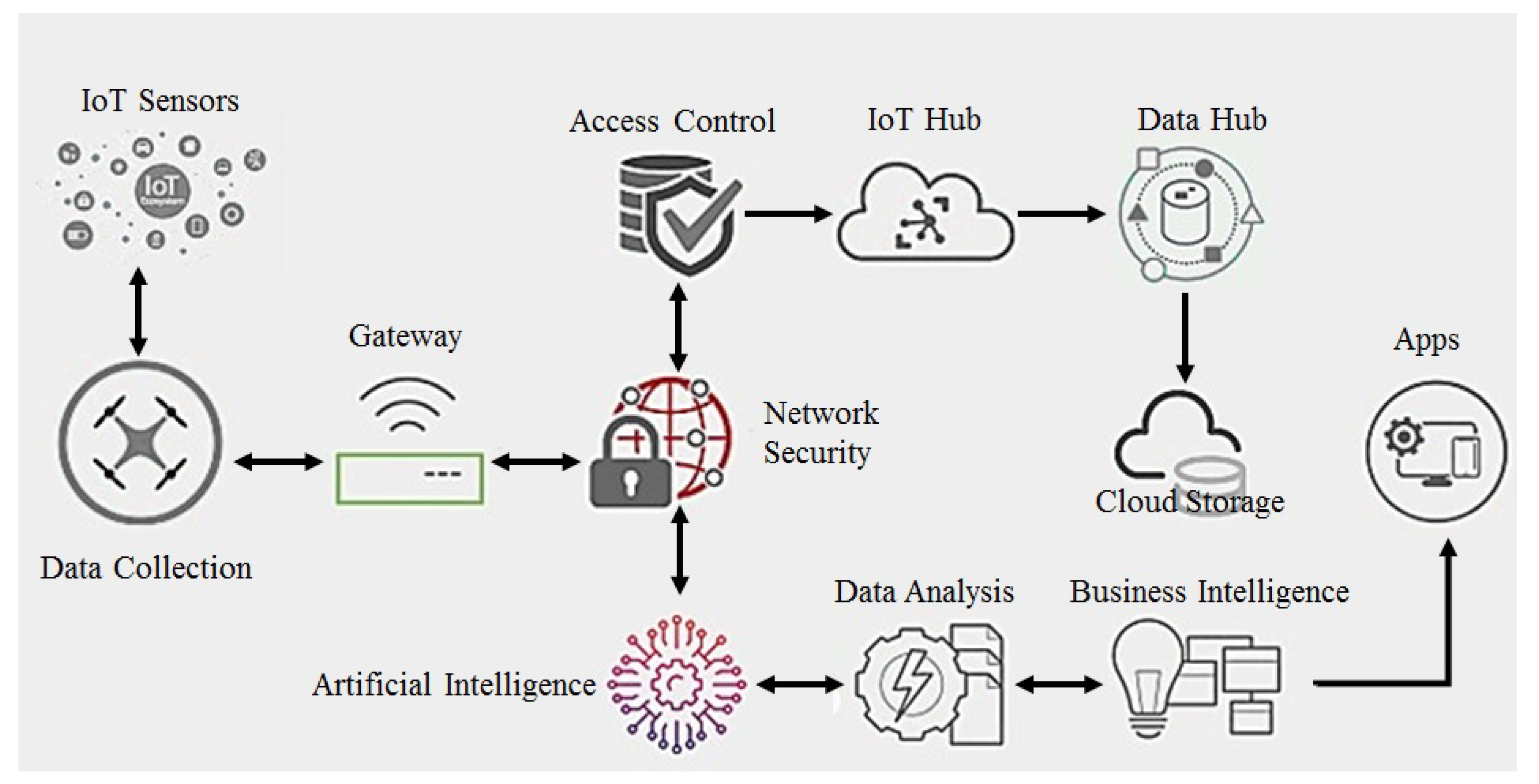
3.1. Layered Architecture for Secure Smart Drones
- Physical privacy threat, which refers to the unauthorized access or tampering of physical devices, sensors, or drones.
- Behavioral privacy threat, which pertains to the collection of personal data through user behavior tracking or monitoring.
- Location privacy threat, which concerns the tracking or disclosure of an individual’s location without consent.
3.2. Physical Components
4. Drone Security
- Threat exposure for cyber-security.
- DDos (denial of service) attacks.
- Malicious attacks.
- Jamming.
- Spoofing.
4.1. Communication Security Threats
- Incorporating a reset option to allow drones to hover in case of hacking or deviation from their designated path due to strong winds, enabling regaining control.
- Developing drone filters capable of detecting signal jammers that could potentially control the drones for cyber-attacks.
- Addressing privacy concerns associated with high-definition cameras on UAVs, ensuring that the recording of private property without permission is prohibited. Canadian Public Safety (CPS) has explicitly stated the need for mutually agreed-upon permission before drones can fly over private properties [65].
4.2. Proposed Approach
4.2.1. Smart Drone Components
4.2.2. Dataset
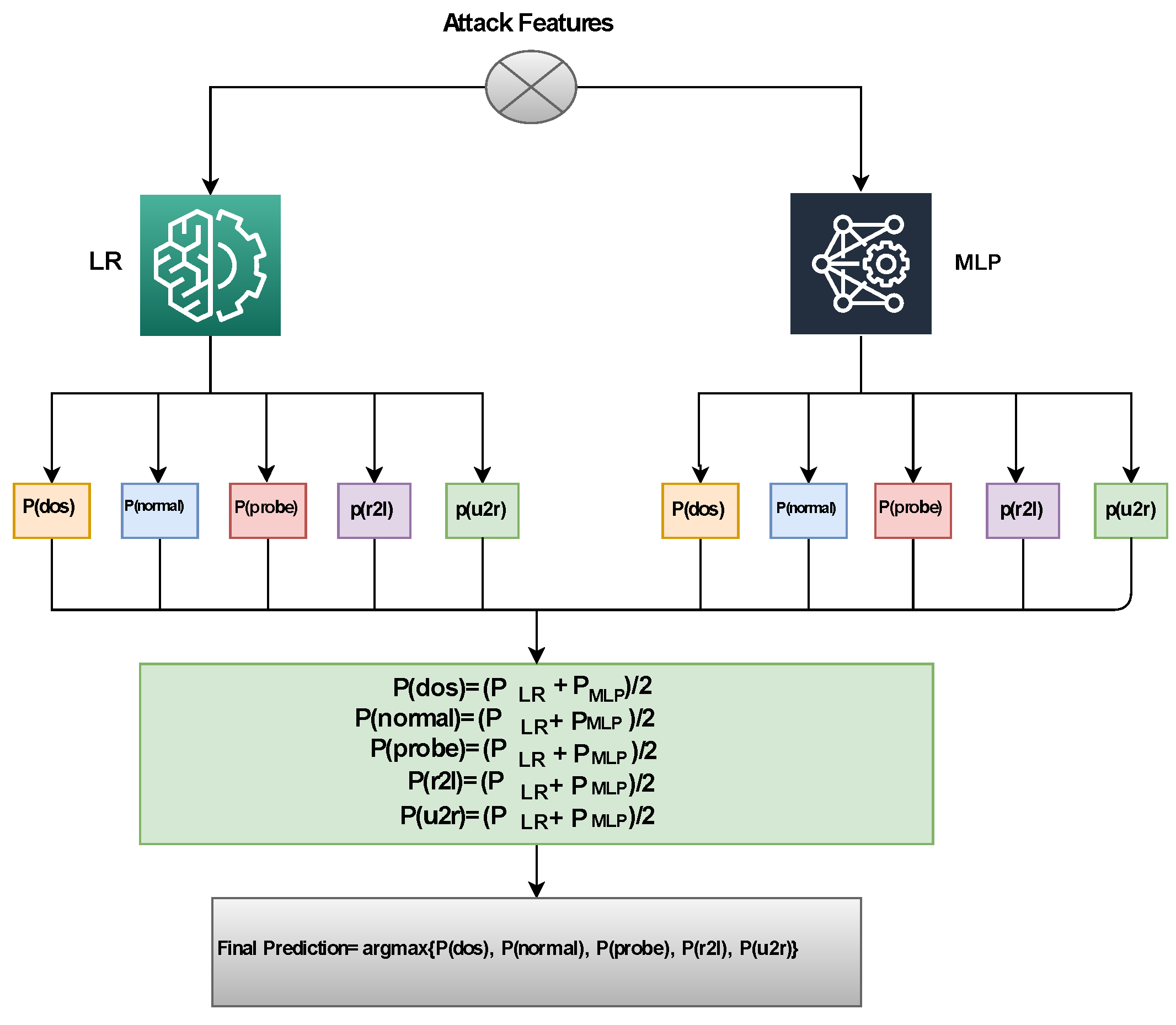
4.2.3. Learning Models
| Algorithm 1: Ensemble approach using LR and MLP (LR-MLP). |
Input: input data = Trained_ LR = Trained_ MLP
|
5. Results and Discussion
5.1. Experimental Results
5.2. Validation of the Proposed Approach
5.3. Performance Comparison of Proposed Approach and State-of-the-Art Models
5.4. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fujimoto, K. DroneWorks Teams Up with Microsoft to Build a Safety Flight Platform for Industrial Drones by Using Azure IoT Hub. Available online: https://microsoft.github.io/techcasestudies/iot/2017/05/19/DroneWorks.html (accessed on 8 April 2020).
- Hell, P.M.; Varga, P.J. Drone systems for factory security and surveillance. Interdiscip. Descr. Complex Syst. INDECS 2019, 17, 458–467. [Google Scholar] [CrossRef]
- Tosato, P.; Facinelli, D.; Prada, M.; Gemma, L.; Rossi, M.; Brunelli, D. An autonomous swarm of drones for industrial gas sensing applications. In Proceedings of the 2019 IEEE 20th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Washington, DC, USA, 10–12 June 2019; pp. 1–6. [Google Scholar]
- Koslowski, R.; Schulzke, M. Drones along borders: Border security UAVs in the United States and the European Union. Int. Stud. Perspect. 2018, 19, 305–324. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on collaborative smart drones and internet of things for improving smartness of smart cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Nouacer, R.; Ortiz, H.E.; Ouhammou, Y.; González, R.C. Framework of Key Enabling Technologies for Safe and Autonomous Drones’ Applications. In Proceedings of the 2019 22nd Euromicro Conference on Digital System Design (DSD), Kallithea, Greece, 28–30 August 2019; pp. 420–427. [Google Scholar]
- Saha, H.N.; Roy, R.; Chakraborty, M.; Sarkar, C. IoT-Enabled Agricultural System Application, Challenges and Security Issues. In Agricultural Informatics: Automation Using the IoT and Machine Learning; Wiley Online Library: Hoboken, NJ, USA, 2021; pp. 223–247. [Google Scholar]
- Ferrag, M.A.; Shu, L.; Yang, X.; Derhab, A.; Maglaras, L. Security and privacy for green IoT-based agriculture: Review, blockchain solutions, and challenges. IEEE Access 2020, 8, 32031–32053. [Google Scholar] [CrossRef]
- Lin, C.; He, D.; Kumar, N.; Choo, K.K.R.; Vinel, A.; Huang, X. Security and privacy for the internet of drones: Challenges and solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Rogers, J. Small States and Armed Drones. In Small States and the New Security Environment; University of Iceland: Reykjavik, Iceland, 2018. [Google Scholar]
- Robakowska, M.; Ślęzak, D.; Tyrańska-Fobke, A.; Nowak, J.; Robakowski, P.; Żuratyński, P.; Ładny, J.; Nadolny, K. Operational and financial considerations of using drones for medical support of mass events in Poland. Disaster Med. Public Health Prep. 2019, 13, 527–532. [Google Scholar] [CrossRef]
- Nassi, B.; Bitton, R.; Masuoka, R.; Shabtai, A.; Elovici, Y. SoK: Security and privacy in the age of commercial drones. In Proceedings of the 2021 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 24–27 May 2021; pp. 1434–1451. [Google Scholar]
- Nayyar, A.; Nguyen, B.L.; Nguyen, N.G. The internet of drone things (IoDT): Future envision of smart drones. In First International Conference on Sustainable Technologies for Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2020; pp. 563–580. [Google Scholar]
- Zhou, J.; Cao, Z.; Dong, X.; Vasilakos, A.V. Security and privacy for cloud-based IoT: Challenges. IEEE Commun. Mag. 2017, 55, 26–33. [Google Scholar] [CrossRef]
- Yin, Z.; Song, Q.; Han, G.; Zhu, M. Unmanned optical warning system for drones. In Proceedings of the Global Intelligence Industry Conference (GIIC 2018), International Society for Optics and Photonics, Beijing, China, 21–23 May 2018; Volume 10835, p. 108350Q. [Google Scholar]
- Ozmen, M.O.; Yavuz, A.A. Dronecrypt-an efficient cryptographic framework for small aerial drones. In Proceedings of the MILCOM 2018–2018 IEEE Military Communications Conference (MILCOM), Los Angeles, CA, USA, 29–31 October 2018; pp. 1–6. [Google Scholar]
- Ozmen, M.O.; Behnia, R.; Yavuz, A.A. IoD-crypt: A lightweight cryptographic framework for Internet of drones. arXiv 2019, arXiv:1904.06829. [Google Scholar]
- Bertino, E. Data Security and Privacy in the IoT. EDBT 2016, 2016, 1–3. [Google Scholar]
- Vattapparamban, E.; Güvenç, I.; Yurekli, A.I.; Akkaya, K.; Uluağaç, S. Drones for smart cities: Issues in cybersecurity, privacy, and public safety. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar]
- Rodday, N. Hacking a professional drone. Black Hat Asia 2016, 2016. Available online: https://www.blackhat.com/docs/asia-16/materials/asia-16-Rodday-Hacking-A-Professional-Drone.pdf (accessed on 9 July 2023).
- Highnam, K.; Angstadt, K.; Leach, K.; Weimer, W.; Paulos, A.; Hurley, P. An uncrewed aerial vehicle attack scenario and trustworthy repair architecture. In Proceedings of the 2016 46th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshop (DSN-W), Toulouse, France, 28 June–1 July 2016; pp. 222–225. [Google Scholar]
- Shoufan, A. Continuous authentication of uav flight command data using behaviometrics. In Proceedings of the 2017 IFIP/IEEE International Conference on Very Large Scale Integration (VLSI-SoC), Abu Dhabi, United Arab Emirates, 23–25 October 2017; pp. 1–6. [Google Scholar]
- Feng, Z.; Guan, N.; Lv, M.; Liu, W.; Deng, Q.; Liu, X.; Yi, W. An efficient uav hijacking detection method using onboard inertial measurement unit. ACM Trans. Embed. Comput. Syst. (TECS) 2018, 17, 1–19. [Google Scholar] [CrossRef]
- Son, Y.; Shin, H.; Kim, D.; Park, Y.; Noh, J.; Choi, K.; Choi, J.; Kim, Y. Rocking drones with intentional sound noise on gyroscopic sensors. In Proceedings of the 24th USENIX Security Symposium (USENIX Security 15), Washington, DC, USA, 12–14 August 2015; pp. 881–896. [Google Scholar]
- Choi, H.; Lee, W.C.; Aafer, Y.; Fei, F.; Tu, Z.; Zhang, X.; Xu, D.; Deng, X. Detecting attacks against robotic vehicles: A control invariant approach. In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 801–816. [Google Scholar]
- Lv, Z. The security of Internet of drones. Comput. Commun. 2019, 148, 208–214. [Google Scholar] [CrossRef]
- Choudhary, G.; Sharma, V.; Gupta, T.; Kim, J.; You, I. Internet of Drones (IoD): Threats, vulnerability, and security perspectives. arXiv 2018, arXiv:1808.00203. [Google Scholar]
- Nassi, B.; Shabtai, A.; Masuoka, R.; Elovici, Y. SoK-security and privacy in the age of drones: Threats, challenges, solution mechanisms, and scientific gaps. arXiv 2019, arXiv:1903.05155. [Google Scholar]
- Giraldo, J.; Sarkar, E.; Cardenas, A.A.; Maniatakos, M.; Kantarcioglu, M. Security and privacy in cyber-physical systems: A survey of surveys. IEEE Des. Test 2017, 34, 7–17. [Google Scholar] [CrossRef]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT framework views and challenges: Towards protecting drones as “Things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Yuan, J.; Song, H. Efficient privacy-preserving authentication framework for edge-assisted Internet of Drones. J. Inf. Secur. Appl. 2019, 48, 102354. [Google Scholar] [CrossRef]
- Yaacoub, J.P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Albalawi, M.; Song, H. Data security and privacy issues in swarms of drones. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–11. [Google Scholar]
- Bera, B.; Saha, S.; Das, A.K.; Kumar, N.; Lorenz, P.; Alazab, M. Blockchain-envisioned secure data delivery and collection scheme for 5g-based iot-enabled internet of drones environment. IEEE Trans. Veh. Technol. 2020, 69, 9097–9111. [Google Scholar] [CrossRef]
- Zhang, Y.; He, D.; Li, L.; Chen, B. A lightweight authentication and key agreement scheme for internet of drones. Comput. Commun. 2020, 154, 455–464. [Google Scholar] [CrossRef]
- Chriki, A.; Touati, H.; Snoussi, H.; Kamoun, F. FANET: Communication, mobility models and security issues. Comput. Netw. 2019, 163, 106877. [Google Scholar] [CrossRef]
- Mehta, P.; Gupta, R.; Tanwar, S. Blockchain envisioned UAV networks: Challenges, solutions, and comparisons. Comput. Commun. 2020, 151, 518–538. [Google Scholar] [CrossRef]
- Luo, A. Drones hijacking. DEF CON Paris France Tech. Rep. 2016. Available online: https://media.defcon.org/DEF%20CON%2024/DEF%20CON%2024%20presentations/ (accessed on 9 July 2023).
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Feng, Z.; Guan, N.; Lv, M.; Liu, W.; Deng, Q.; Liu, X.; Yi, W. Efficient drone hijacking detection using onboard motion sensors. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), Lausanne, Switzerland, 27–31 March 2017; pp. 1414–1419. [Google Scholar]
- Butt, U.A.; Mehmood, M.; Shah, S.B.H.; Amin, R.; Shaukat, M.W.; Raza, S.M.; Suh, D.Y.; Piran, M.J. A review of machine learning algorithms for cloud computing security. Electronics 2020, 9, 1379. [Google Scholar] [CrossRef]
- Gupta, C.; Johri, I.; Srinivasan, K.; Hu, Y.C.; Qaisar, S.M.; Huang, K.Y. A systematic review on machine learning and deep learning models for electronic information security in mobile networks. Sensors 2022, 22, 2017. [Google Scholar] [CrossRef] [PubMed]
- Alsheikh, M.A.; Lin, S.; Niyato, D.; Tan, H.P. Machine learning in wireless sensor networks: Algorithms, strategies, and applications. IEEE Commun. Surv. Tutor. 2014, 16, 1996–2018. [Google Scholar] [CrossRef] [Green Version]
- Sajid, M.B.E.; Ullah, S.; Javaid, N.; Ullah, I.; Qamar, A.M.; Zaman, F. Exploiting machine learning to detect malicious nodes in intelligent sensor-based systems using blockchain. Wirel. Commun. Mob. Comput. 2022, 2022, 1–16. [Google Scholar] [CrossRef]
- Vedula, V.; Lama, P.; Boppana, R.V.; Trejo, L.A. On the Detection of Low-Rate Denial of Service Attacks at Transport and Application Layers. Electronics 2021, 10, 2105. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Sinopoli, B. Active Attack Detection and Control in Constrained Cyber–Physical Systems Under Prevented Actuation Attack. arXiv 2021, arXiv:2101.09885. [Google Scholar]
- Thanh, P.D.; Giang, H.T.H.; Hong, I.P. Anti-jamming RIS communications using DQN-based algorithm. IEEE Access 2022, 10, 28422–28433. [Google Scholar] [CrossRef]
- Khalaf, B.A.; Mostafa, S.A.; Mustapha, A.; Mohammed, M.A.; Abduallah, W.M. Comprehensive review of artificial intelligence and statistical approaches in distributed denial of service attack and defense methods. IEEE Access 2019, 7, 51691–51713. [Google Scholar] [CrossRef]
- Yaseen, H.S.; Al-Saadi, A. Q-learning based distributed denial of service detection. Int. J. Electr. Comput. Eng. 2023, 13, 972. [Google Scholar] [CrossRef]
- Xiao, L.; Li, Y.; Huang, X.; Du, X. Cloud-based malware detection game for mobile devices with offloading. IEEE Trans. Mob. Comput. 2017, 16, 2742–2750. [Google Scholar] [CrossRef]
- Apruzzese, G.; Colajanni, M.; Ferretti, L.; Marchetti, M. Addressing adversarial attacks against security systems based on machine learning. In Proceedings of the 2019 11th International Conference on Cyber Conflict (CyCon), Tallinn, Estonia, 28–31 May 2019; Volume 900, pp. 1–18. [Google Scholar]
- Almiani, M.; AbuGhazleh, A.; Al-Rahayfeh, A.; Atiewi, S.; Razaque, A. Deep recurrent neural network for IoT intrusion detection system. Simul. Model. Pract. Theory 2020, 101, 102031. [Google Scholar] [CrossRef]
- Liu, G.; Zhao, H.; Fan, F.; Liu, G.; Xu, Q.; Nazir, S. An enhanced intrusion detection model based on improved kNN in WSNs. Sensors 2022, 22, 1407. [Google Scholar] [CrossRef] [PubMed]
- Shafique, A.; Mehmood, A.; Elhadef, M. Detecting signal spoofing attack in uavs using machine learning models. IEEE Access 2021, 9, 93803–93815. [Google Scholar] [CrossRef]
- Nugroho, K.; Winarno, E. Spoofing Detection of Fake Speech Using Deep Neural Network Algorithm. In Proceedings of the 2022 International Seminar on Application for Technology of Information and Communication (iSemantic), Semarang, Indonesia, 17–18 September 2022; pp. 56–60. [Google Scholar]
- Li, Z.; Lu, Y.; Shi, Y.; Wang, Z.; Qiao, W.; Liu, Y. A Dyna-Q-based solution for UAV networks against smart jamming attacks. Symmetry 2019, 11, 617. [Google Scholar] [CrossRef] [Green Version]
- Shingate, K.; Jagdale, K.; Dias, Y. Adaptive traffic control system using reinforcement learning. Int. J. Eng. Res. Technol. 2020, 9. [Google Scholar]
- Radanliev, P.; De Roure, D.C.; Nicolescu, R.; Huth, M.; Montalvo, R.M.; Cannady, S.; Burnap, P. Future developments in cyber risk assessment for the internet of things. Comput. Ind. 2018, 102, 14–22. [Google Scholar] [CrossRef]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV command and control, navigation and surveillance: A review of potential 5G and satellite systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar]
- IvyPanda. Unmanned Aerial Vehicles Essay. Available online: https://ivypanda.com/essays/unmanned-aerial-vehicles-essay/ (accessed on 9 July 2023).
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2015; Volume 1. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Cook, K.L. The silent force multiplier: The history and role of UAVs in warfare. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–7. [Google Scholar]
- Mugheri, A.A.; Siddiqui, M.A.; Khoso, M. Analysis on security methods of wireless sensor network (WSN). Sukkur IBA J. Comput. Math. Sci. 2018, 2, 52–60. [Google Scholar]
- Cavoukian, A. Privacy and Drones: Unmanned Aerial Vehicles; Information and Privacy Commissioner of Ontario: Toronto, ON, Canada, 2012. [Google Scholar]
- Speiser, J.L.; Miller, M.E.; Tooze, J.; Ip, E. A comparison of random forest variable selection methods for classification prediction modeling. Expert Syst. Appl. 2019, 134, 93–101. [Google Scholar] [CrossRef] [PubMed]
- Charbuty, B.; Abdulazeez, A. Classification based on decision tree algorithm for machine learning. J. Appl. Sci. Technol. Trends 2021, 2, 20–28. [Google Scholar] [CrossRef]
- Chen, S.; Webb, G.I.; Liu, L.; Ma, X. A novel selective naïve Bayes algorithm. Knowl.-Based Syst. 2020, 192, 105361. [Google Scholar] [CrossRef]
- Ribeiro, A.A.; Sachine, M. On the optimal separating hyperplane for arbitrary sets: A generalization of the SVM formulation and a convex hull approach. Optimization 2020, 71, 213–226. [Google Scholar] [CrossRef]
- Tao, P.; Sun, Z.; Sun, Z. An improved intrusion detection algorithm based on GA and SVM. IEEE Access 2018, 6, 13624–13631. [Google Scholar] [CrossRef]
- Shipe, M.E.; Deppen, S.A.; Farjah, F.; Grogan, E.L. Developing prediction models for clinical use using logistic regression: An overview. J. Thorac. Dis. 2019, 11, S574. [Google Scholar] [CrossRef]
- MUmerSabir. Dataset. Available online: https://github.com/MUmerSabir/MDPIElectronics (accessed on 9 July 2023).
- Li, K.; Zhou, H.; Tu, Z.; Wang, W.; Zhang, H. Distributed Network Intrusion Detection System in Satellite-Terrestrial Integrated Networks Using Federated Learning. IEEE Access 2020, 8, 214852–214865. [Google Scholar] [CrossRef]
- Jia, B.; Ma, Y.; Huang, X.; Lin, Z.; Sun, Y. A novel real-time ddos attack detection mechanism based on MDRA algorithm in big data. Math. Probl. Eng. 2016, 2016, 1467051. [Google Scholar] [CrossRef] [Green Version]
- Andresini, G.; Appice, A.; Di Mauro, N.; Loglisci, C.; Malerba, D. Multi-channel deep feature learning for intrusion detection. IEEE Access 2020, 8, 53346–53359. [Google Scholar] [CrossRef]
- Lian, W.; Nie, G.; Jia, B.; Shi, D.; Fan, Q.; Liang, Y. An Intrusion Detection Method Based on Decision Tree-Recursive Feature Elimination in Ensemble Learning. Math. Probl. Eng. 2020, 2020, 2835023. [Google Scholar] [CrossRef]
- Hussain, J.; Lalmuanawma, S.; Chhakchhuak, L. A two-stage hybrid classification technique for network intrusion detection system. Int. J. Comput. Intell. Syst. 2016, 9, 863–875. [Google Scholar] [CrossRef] [Green Version]
- Jiang, K.; Wang, W.; Wang, A.; Wu, H. Network intrusion detection combined hybrid sampling with deep hierarchical network. IEEE Access 2020, 8, 32464–32476. [Google Scholar] [CrossRef]
- Siddique, K.; Akhtar, Z.; Khan, F.A.; Kim, Y. KDD cup 99 data sets: A perspective on the role of data sets in network intrusion detection research. Computer 2019, 52, 41–51. [Google Scholar] [CrossRef]
- Tavallaee, M.; Bagheri, E.; Lu, W.; Ghorbani, A.A. A detailed analysis of the KDD CUP 99 data set. In Proceedings of the 2009 IEEE Symposium on Computational Intelligence for Security and Defense Applications, Ottawa, ON, Canada, 8–10 July 2009; pp. 1–6. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Attack | Cyber-Security Threats | Threats Found in | Countermeasures Introduced in |
|---|---|---|---|
| Protocol-based attacks | Security of communication link | [13,17,18,19] | [17] |
| Data confidentiality protection | [9] | ||
| Replay attack | [20,21] | [22] | |
| Privacy leakage | [9,19] | ||
| De-authentication attack | [4,13] | ||
| Sensor-based attacks | GPS-spoofing/-jamming attack | [12] | [23] |
| Motion sensor spoofing | [24] | [25] | |
| UAV-spoofing/-jamming attack | [12] | ||
| Compromised component | IoT security threats | [12] | |
| Control/data interception | [12,18] | ||
| Jammers | Denial of service | [4,12,13] | |
| Stop packet delivery | [16] | [16] |
| Attack | Security Technique | Machine Learning Solution |
|---|---|---|
| Jamming | Secure offloading | Q-learning [42,44], DQN [47] |
| Denial of service | Secure offloading | Neural networks [41], Multivariate correlation analysis [48], Q-learning [49] |
| Malware | Access control | Q/Dyna-Q/PDS [50], K-nearest neighbors [51], Random Forest [51] |
| Intrusion | Access control | Naive Bayes [43], Support vector machine [43], neural network [52], K-NN [53] |
| Spoofing | Authentication | SVM [54], DNN [55], Dyna-Q [56], Q-learning [56] |
| Traffic blockage | Authentication | Q-learning [57] |
| Class | Description |
|---|---|
| DoS Attack | Use of resources or services is denied to authorized users. |
| Normal | Connections are generated by simulating user behavior. |
| User-to-remote attacks | Access to account types of administrator is gained by unauthorized entities. |
| Prob attack | Information about the system is exposed to unauthorized entities. |
| Remote-to-local attacks | Access to hosts is gained by unauthorized entities. |
| Model | Description |
|---|---|
| RF | RF is a classification algorithm employing Decision Trees or estimators in ensemble learning. It utilizes the bagging technique and bootstrap samples to train the trees. The results of the individual trees are combined by voting to improve the overall accuracy. All trees are constructed based on the same pattern to test the data to evaluate the model’s performance. A Decision Tree with a lower error rate is assigned a higher weight, which reduces the likelihood of a false prediction [66]. |
| DT | DT is an ML model that is widely used for the classification of text, and it relies on multiple variables to make predictions about an independent capricious event. Data are fragmented into branches in it to construct a reversed tree, which consists of internal nodes, root nodes, and leaf nodes. This algorithm can efficiently handle every type of dataset without requiring a complex parametric structure [67]. |
| NB | The NB classifier is a Bayes theorem-based classifier that assumes objectivity between conjecturers. This theorem serves as the foundation for the classifier and is easy to construct, requiring only simple iterative parameter estimation. As a result, it is well suited to large datasets. Despite its simplicity, the Naive Bayes classifier produces excellent results and outperforms other classifiers of sophisticated nature [68]. |
| SVM | SVM is a popular algorithm for text classification that draws hyperplanes by maximizing the marginal distance to separate classes [69]. In binary classification, the text is divided into two non-overlapping classes by the SVM hyperplane. Compared with deep learning methods, SVM is simpler and less complex, making it easy to interpret. In addition to text classification, intrusion detection is also performed using SVM [70]. |
| Classifier | Parameter |
|---|---|
| ET | Number of trees = 200, random state = 52, maximum depth = 15 |
| DT | Number of trees = 200, random state = 52, maximum depth = 15 |
| RF | Number of trees = 200, random state = 52, maximum depth = 15 |
| LR | Solver = ‘lbfgs’, penalty = ‘l2’ |
| SVM | C = 1.0, kernel = ‘rbf’, gamma = ‘auto’ |
| NB | Binarize = 0.0, alpha = 1.0 |
| MLP | Hidden layers = 3, neurons = 200, activation function = ‘reLU’, batch size = 16, dropout rate = 0.5, optimizer = ‘adam’ |
| VC (LR + MLP) | Voting = ‘soft’ |
| Evaluation Parameter | Formula |
|---|---|
| Accuracy | |
| Precision | |
| Recall | |
| F1-score | 2* |
| Element | Details |
|---|---|
| Language | Python 3.8 |
| OS | 64-bit window 10 |
| RAM | 32 GB |
| GPU | Nvidia, 1060, 8 GB |
| CPU | Intel Xeon eight-core CPUs with 2.8 GHz processor |
| Model | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|
| Random Forest | 99.15% | 99.82% | 99.86% | 99.84% |
| Decision Tree | 99.11% | 99.11% | 99.21% | 99.16% |
| Logistic Regression | 99.53% | 99.82% | 99.90% | 99.86% |
| Naive Bayes | 97.32% | 98.41% | 97.27% | 97.89% |
| Support Vector Machine | 99.14% | 99.22% | 99.30% | 99.26% |
| MLP | 99.64% | 99.76% | 99.88% | 99.82% |
| RegressionNet | 99.80% | 99.81% | 99.89% | 99.86% |
| Domain | Attack Type | Attack Time |
|---|---|---|
| Terrestrial attacks | Web attack | 15:21→15:31 |
| Botnet | 15:01→15:10 | |
| LDAP DDoS | 16:01→16:11 | |
| Backdoor | 15:41→15:52 | |
| NetBIO DDoS | 16:41→16:50 | |
| MSSQL DDoS | 16:21→16:30 | |
| Portmap DDoS | 17:01→17:13 | |
| UDP DDoS | 17:41→17:52 | |
| Syn DDoS | 17:21→17:32 | |
| Satellite attacks | DUP DDoS | 16:52→17:20 |
| Syn DDoS | 15:23→15:57 |
| Attack Type | Accuracy |
|---|---|
| Terrestrial Attack | |
| UDP_Dos | 100.00% |
| Syn_DDoS | 95.81% |
| Average accuracy | 97.90% |
| Satellite Attack | |
| Backdoor | 97.41% |
| LDAP DDoS | 94.22% |
| MSSQL DDoS | 96.24% |
| NetBIO DDoS | 97.37% |
| Portmap DDoS | 92.19% |
| Syn DDoS | 98.41% |
| UDP DDoS | 98.99% |
| Average accuracy | 97.90% |
| Merged Dataset | |
| All attacks | 91.64% |
| Method | Dataset | Accuracy |
|---|---|---|
| RegressionNet | Drone dataset | 99.89% |
| RegressionNet | KDD CUP 99 | 99.87% |
| RegressionNet | NSL-KDD | 99.90% |
| PCA + MCA [74] | KDD CUP 99 | 94.20% |
| Deep Neural Model [75] | KDD CUP 99 | 92.49% |
| DT-RFE [76] | KDD CUP 99 | 99.21% |
| SVM-ANN [77] | NSL-KDD | 91.48% |
| Deep Hierarchical Model [78] | NSL-KDD | 83.58% |
| DT-RFE [76] | NSL-KDD | 99.23% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alturki, N.; Aljrees, T.; Umer, M.; Ishaq, A.; Alsubai, S.; Saidani, O.; Djuraev, S.; Ashraf, I. An Intelligent Framework for Cyber–Physical Satellite System and IoT-Aided Aerial Vehicle Security Threat Detection. Sensors 2023, 23, 7154. https://doi.org/10.3390/s23167154
Alturki N, Aljrees T, Umer M, Ishaq A, Alsubai S, Saidani O, Djuraev S, Ashraf I. An Intelligent Framework for Cyber–Physical Satellite System and IoT-Aided Aerial Vehicle Security Threat Detection. Sensors. 2023; 23(16):7154. https://doi.org/10.3390/s23167154
Chicago/Turabian StyleAlturki, Nazik, Turki Aljrees, Muhammad Umer, Abid Ishaq, Shtwai Alsubai, Oumaima Saidani, Sirojiddin Djuraev, and Imran Ashraf. 2023. "An Intelligent Framework for Cyber–Physical Satellite System and IoT-Aided Aerial Vehicle Security Threat Detection" Sensors 23, no. 16: 7154. https://doi.org/10.3390/s23167154