1. Introduction
In recent years, rehabilitation systems have been developed in order to assist patients with their movements and restore their motor ability. Exoskeletons have contributed to patients’ health by helping them to carry out physiotherapeutic routines [
1]. Among the tasks with which the exoskeletons assist, we can mention support for walking, for standing, and for the execution of specific therapy routines [
2,
3,
4]. The exoskeletons for patients or elderly care are responsible for helping people with some type of weakness to carry out their daily tasks as in [
5], in which the authors developed a lower limb exoskeleton with the purpose of assisting the sit-to-stand and stand-to-sit tasks for people with spinal cord injury or elderly people. In addition, exoskeletons applied to rehabilitation have become an important tool for therapists; they reduce the risks to their health caused by the transport of people [
6]. There are various architectures that can be used for bilateral training; for lower limbs, mainly for adults, as in [
7], where three healthy male subjects aged 27, 25 and 24, and three subjects undergoing stroke rehabilitation, two men and one woman aged 54, 68 and 30, were enrolled in experiments with walking rehabilitation exoskeletons. Some authors place great emphasis on the mechanical and electronic design of the exoskeleton as a fundamental part of its development, as in [
8,
9], where the authors present in detail the mechanical design of their exoskeletons.
An important part of the research on exoskeletons consists of the actuators that will be used. In [
10], many papers on exoskeletons that were developed using springs as part of their structure were reviewed, such as: series elastic actuators (SEA), parallel elastic actuators (PEA) and elastic actuators of the magneto-rheological series (MRSEA) and other interactions. According to this paper, the use of SEA actuators is important given that they ensure that the coupling between the user and the motor is compliant, thereby protecting the user’s joints from impact loads and other undesirable interactions. Furthermore, as mentioned in [
10], “the compliance introduced by the spring facilitates a torque-based control strategy by transforming the torque/force control problem into a position control problem based on the measurement of the springs deformation. These sensors, widely used in exoskeletons, allow a smooth force transmission, accurate force control, lower output impedance, shock tolerance, energy efficiency, and back-drivability in human–robot physical interactions. The spring acts as an impact damper and reduces the actuator inertia felt by the user, thus allowing the user to increase safety and comfort. A further advantage is the peak motor power reduction exploiting the spring capacity of storing energy. In [
11], the authors outline the hardware of two printed circuit board (PCB) designs for collecting and conditioning sensor feedback from two SEA subsystems and an inertial measurement unit (IMU).
One of the recently explored areas is the detection of the intention of motion to activate specific movement routines in exoskeletons [
12,
13]. The human intention (HI) is defined as the determination of a person to perform a movement, which is a fundamental component in the development of exoskeletons and is the goal of this paper. Human intention detected by the correct sensors produces a human–machine interaction in which the patient collaborates with the device during the recovery process. Electromyographic signals can be used as an alternative to detecting the human intention, which are manifestations of the movement generated 30 ms before an action is performed [
14,
15]. Some studies that apply surface electromyography (sEMG) use the sEMG-driven musculoskeletal (MS) model, which establishes a relationship between signals and joint moment, angular velocity or acceleration [
16].
Another group of studies implements machine learning (ML). Machine learning performs discrete motion classification or continuous motion estimation by mapping sEMG inputs to the human movement intention through techniques such as neural networks (NN), vector support machines (VSM), and K-means (KM), among others [
14]. In [
16], the authors estimated the torque of the knee joint exerted by the set of muscles used for the extension and flexion of the knee, in real time with the implementation of a Hill-type musculoskeletal model. In [
17], the authors accomplished the estimation of the torque using sEMG and the optimal control of adaptive impedance during rehabilitation assisted by an active knee orthosis. The optimization model was performed by comparing the estimated sEMG torque with the torque generated by the inverse dynamics tool of the OpenSim software. As an alternative solution, they proposed a multilayer perceptron neural network (NN) to map the EMG signals to the user’s torque. In [
18], the authors presented an electric assistance robot that adapts to human intention and a method to recognize the successive phases that a subject performs during the movement of sitting and standing. Surface electromyographic signals (sEMG) and the ground reaction force (FGR) were used as inputs of the algorithm. A neural network assembly and a window of 0.1 s were used to identify each phase.
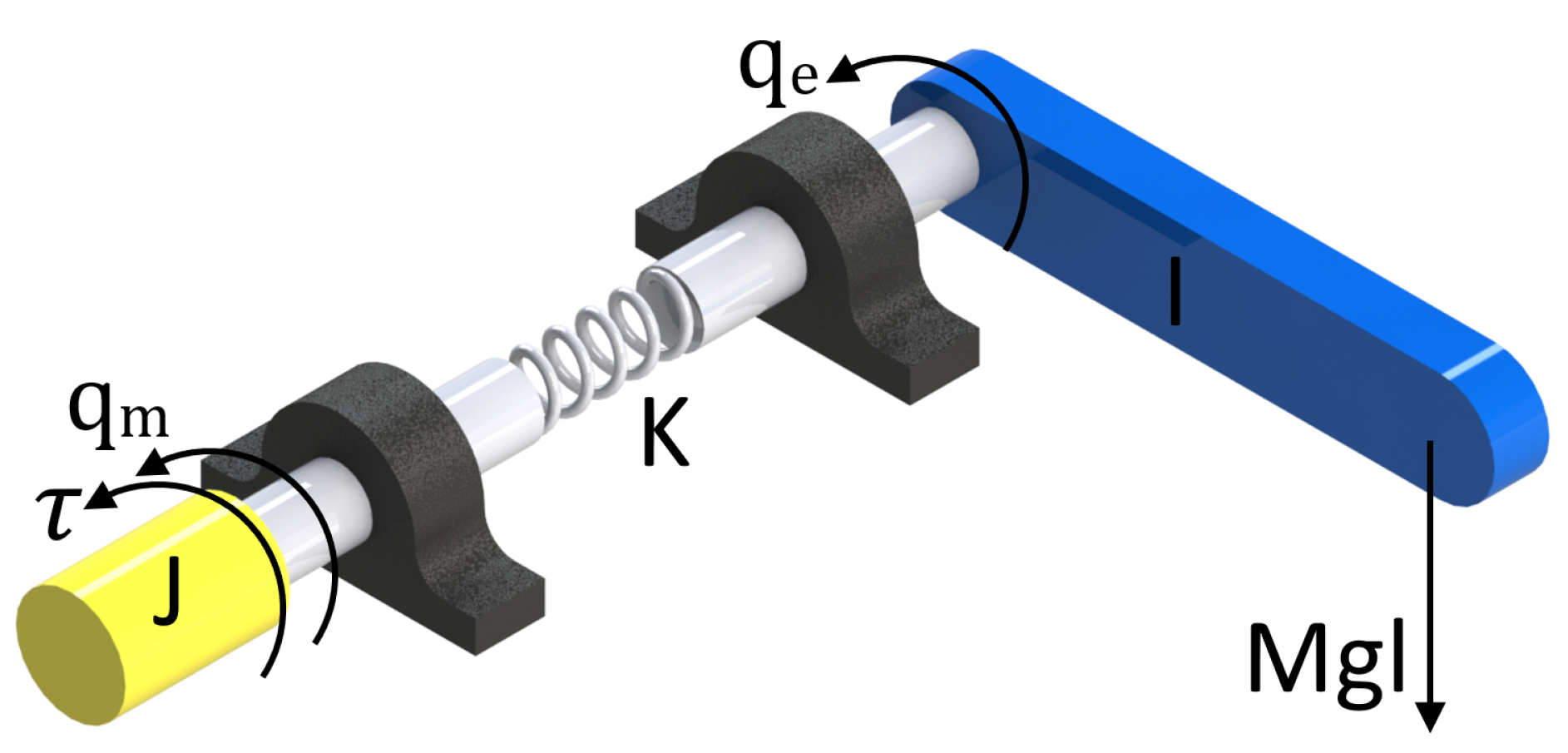
In this paper, an exoskeleton was developed with rotational elastic type actuators which are a variation of the SEA actuators, whose operation is explained in more detail in
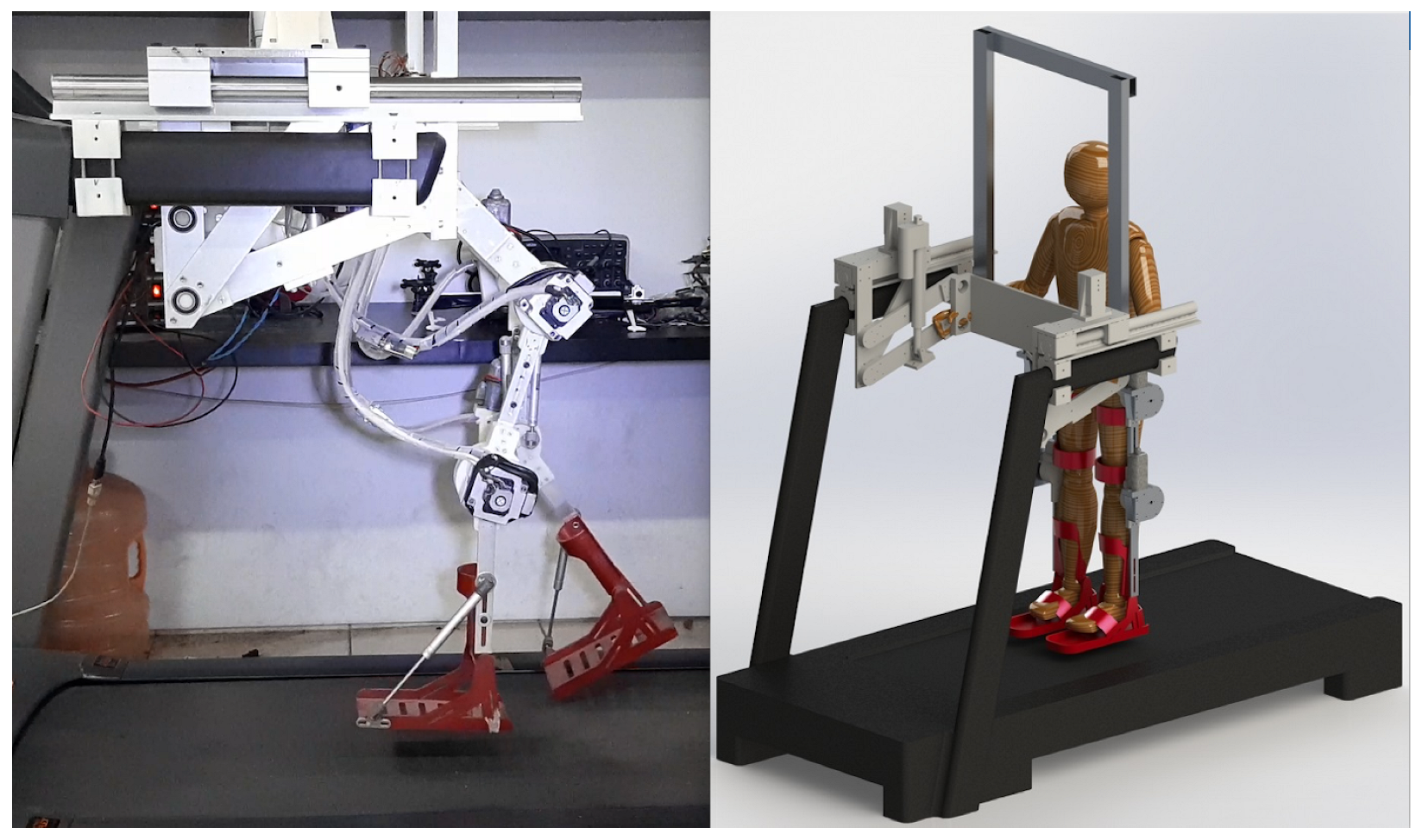
Section 3.2. The exoskeleton prototype has six degrees of freedom divided in four DoF for the lower limbs (two for knees joints and the other two for hip joints) and two DoF as part of the mechanism that allows standing and sitting exercises. Mechanically, the exoskeleton can be divided into two main parts, the lifting system, and the lower limb system. In
Figure 1, we see these two parts that integrate the complete prototype. The lifting system holds the patient by the torso using a safety harness and is responsible for supporting the full weight of the patient, and is actuated by two linear motors and a 4-bar system used to sit and stand the patient. The lower limb system is an anthropomorphic exoskeleton that supports the patient’s legs, which is actuated by four motors whose axes coincide with the axis of rotation of the patient’s hip and knee joints. The mechanical design of the prototype allows the exoskeleton to take the human patient and assist him/her from sitting to standing position for later assisting him/her in a gait rehabilitation exercises.
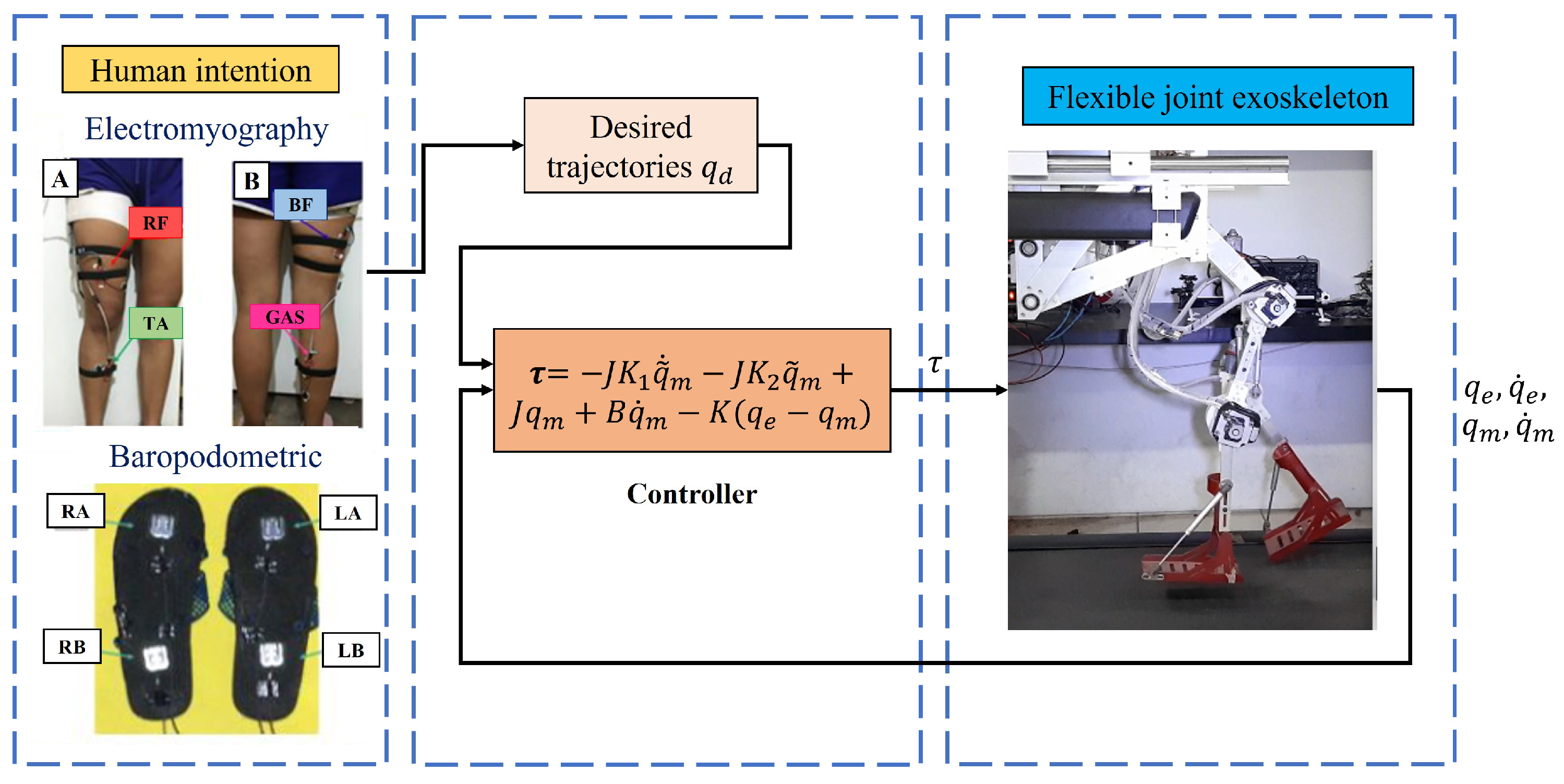
The exoskeleton prototype also contains a human intention detection system based on electromyography; these signals along with the signals from the baropodometry sensors are classified by an algorithm that decides which routine (walking, sitting or standing) the exoskeleton should perform. These routines are already programmed into a desired trajectory suitable for each joint of the exoskeleton so that the classification system only generates a movement command.
Finally, the exoskeleton contains a feedback control system, which performs trajectory tracking. When the desired trajectory is finished, the human intention detection system waits again for an effort from the patient to classify the signals obtained and again decide which cycle to start reproducing.
To develop the control law, a dynamical model of the exoskeleton was obtained considering its flexible joints, but a dynamical model of the human is not obtained because we are performing only passive rehabilitation. That means that the patient must not make any effort during the performance of the exoskeleton movement routine. If for some reason the human generates any movement or effort, these are considered disturbances and the proposed control is capable of rejecting them.
Then, the goal of this paper was the use of a signal classifier of baropodometry, electromyography, and torque sensors as a human detection system to develop a lower limb therapy exoskeleton with a feedback control law that considers the non-linearities of the mathematical model to obtain numerical and real-time experimental results.
The paper is organized as follows. In
Section 2, the design and mechanical development of the platform is presented. In
Section 3, the development of the exoskeleton dynamical model with elastic joints and the obtaining trajectories of motion are presented. The electromyography and baropodometry sensors are described in
Section 4. The design and development of the control law are presented in
Section 5. The numerical results and real-time experimental results are presented in
Section 6. Finally, the conclusions are presented in
Section 7.
2. Platform Development
The developed lower limb exoskeleton was specifically designed to meet the following requirements:
Adjust the sizes of the Latin American population;
Support the patient’s weight without the need for a crane;
Assist in the task of retraining training, as well as in the task of sitting and getting up.
In addition, the design must be ergonomic and easy to place.
The final design consists of three parts: the exoskeleton legs with actuators and sensors, the exoskeleton lifting system, and the control unit. The exoskeleton rehabilitation movements are made through a series of links attached by joints that correspond to the patient’s knee and hip joints.
2.1. Exoskeleton Lower Limb System
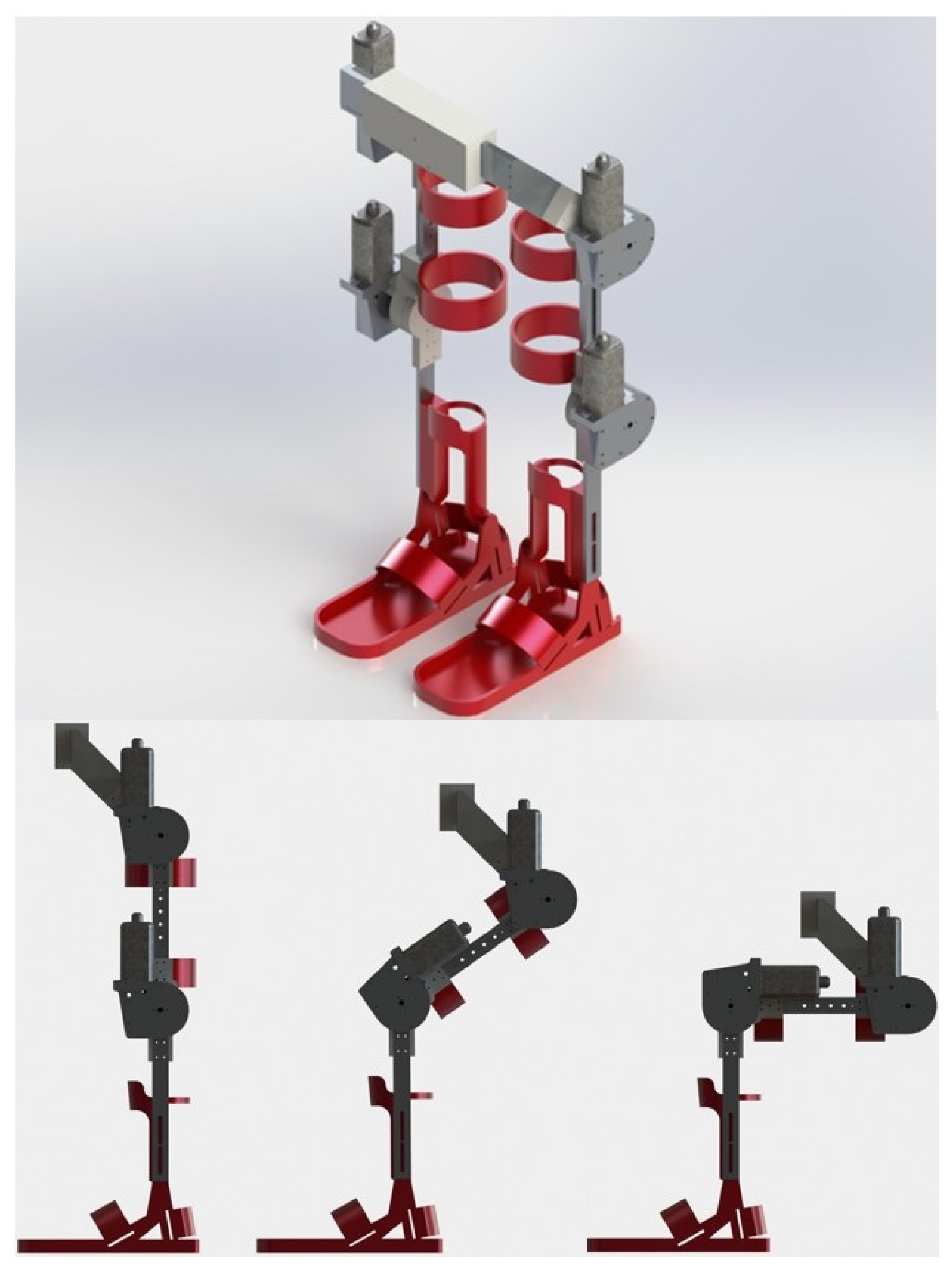
The exoskeleton’s legs, shown in
Figure 2, were designed with an anthropomorphic approach to allow easy adjustment of the patient’s legs. In this sense, the exoskeleton was specifically designed so that it could fit the patient in front of the body and not in the back, with the intention that the patient can be adjusted while sitting, and help the patient to get up and then start the rehabilitation exercises. In addition, from the sitting position, the exoskeleton can help in exercises such as knee extension or the process of sitting and getting up. Considering the variations in population measures, an extension system was added in the links of the legs and trunk, with the purpose of covering a slightly wider range of patients.
The required torque for each joint was provided by an AHC2 family Bosh CD engine, through an elastic transmission, which generates up to 20 Nm of torque. Two absolute encoders model AMT20 of the company CUI INC; Tualatin, U.S.A., with a resolution of 12 bits and SPI interface, were used for each joint to measure the angular position of both the link and the motor, and the angular speeds and accelerations can be calculated.
In order to keep the user safe, we should avoid hyperextension in the joints. Mechanical stops are added in all the joints to obtain the range of motion (RoM) described in
Table 1.
2.2. Exoskeleton Lifting System
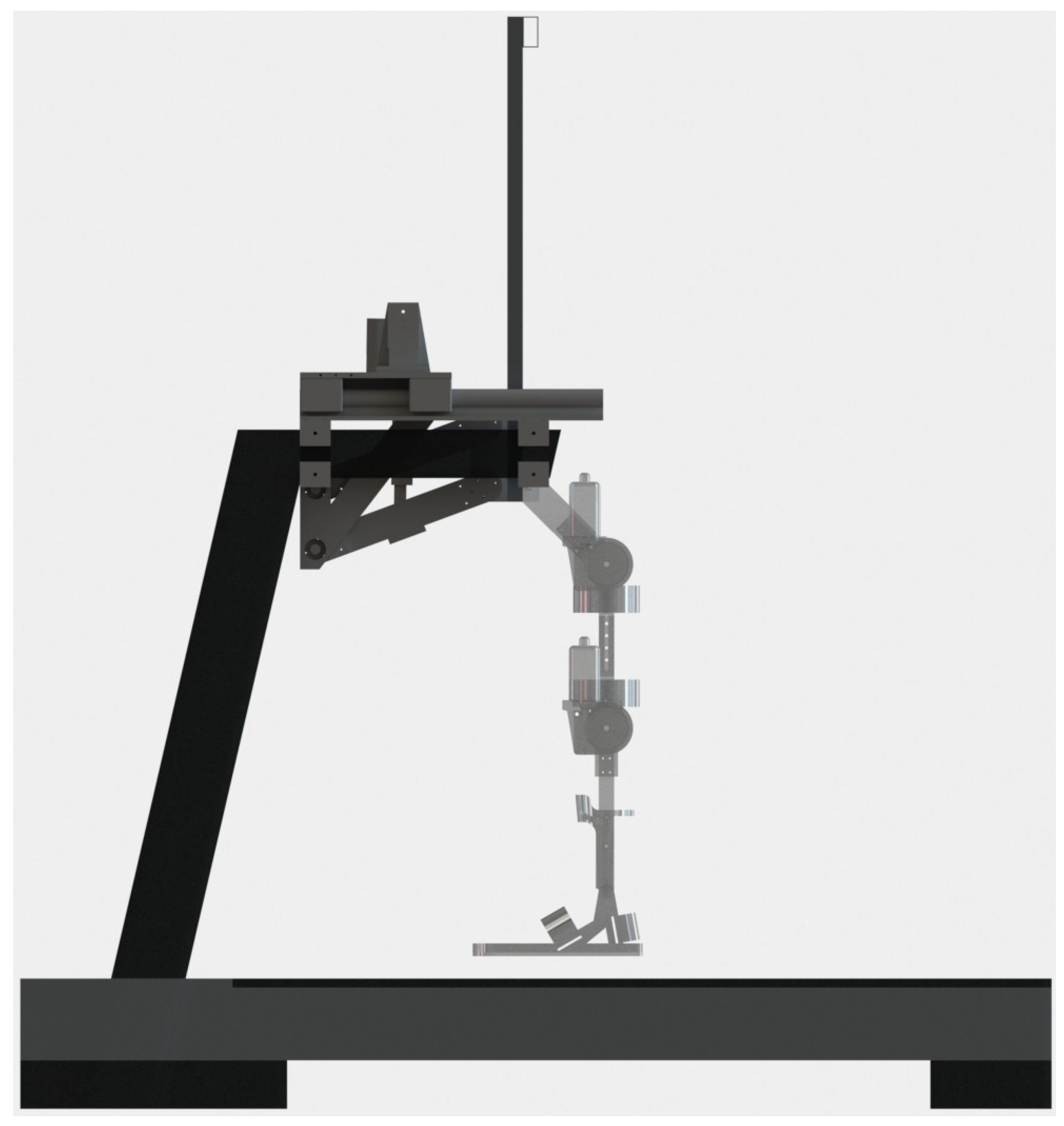
The lifting system of the exoskeleton is responsible for carrying the entire weight of the patient, from the sitting position to the standing position and for the entire rehabilitation session, leaving the rehabilitation task to the legs only. The exoskeleton lifting system is made up of a double four-bar system operated by two linear actuators, model LACT6P, which can withstand a load of 50 kg each, see
Figure 3. It is anchored, at one end, to the hand supports of a standard treadmill and, at the other end, joins the mechanical legs, allowing them to go up and down while always maintaining its vertical.
The patient is supported by a harness (not shown) that is attached to the upper bar of the harness frame, which is joined to the four-bar system in the same place where the mechanical legs are connected. Thus the exoskeleton is able to comfortably lift patients weighing more than average.
2.3. Control System
The control system consists of the real-time control electronic card and the host computer with the interface for the physiotherapist.
The control electronic card, manufactured by National Instruments© (Austin, TX, USA), is responsible for running the controller in real-time, receiving data from absolute encoders and analog sensors, and operating the motors through PWM outputs which are connected to H-bridge controllers; it communicates with the host computer via a USB connection, and also has an emergency stop system available for the patient. It has two secondary cards designed ad hoc for the connection of all the sensors and motors of the exoskeleton, which has six degrees of freedom.
The main computer runs the physiotherapist’s graphic interface, allowing him to command all the movements and exercises that the exoskeleton can execute. For development stages, the main computer is used to program new control laws and test their performance; in this case, the interface shows graphs of all the variables of interest as well as the desired trajectories
4. Detection of Human Intention
The human intention can be detected using the flexible part of the robot joints. When the user slightly flexes the hip or a knee, the elastic element of the exoskeleton joint contracts, generating feedback to the exoskeleton control that sends a signal to move the prototype motors. This is the simplest way to control the exoskeleton but it requires the user to have at least a small degree of mobility in the joints.
When the user has some impediment to mobilize but still generates electromyography signals, the human intention can be detected with a system that interprets these signals and generates commands to perform desired tasks.
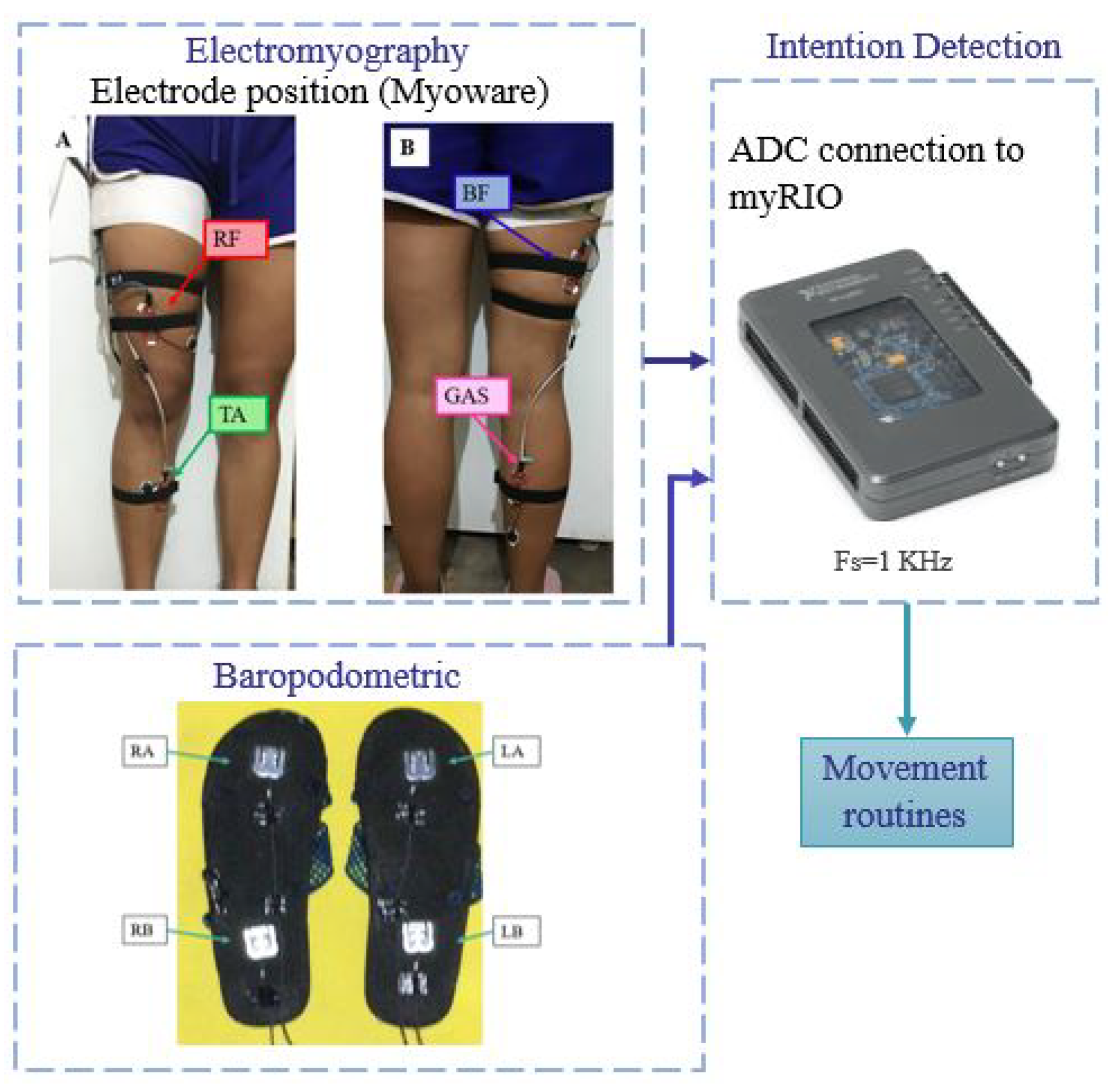
The detection system proposed and developed in this paper has two inputs corresponding to surface electromyography and baropodometry sensors that are read by the myRIO microprocessor where the signals are processed. The detection system recognizes three different movements and then generates the corresponding movement routine for the exoskeleton, as shown in
Figure 8.
The electromyographic acquisition is divided into four stages: the skin preparation, the electrode position, the analog conditioning, and the analog-digital conversion. The human skin preparation consists of cleaning the skin to provide sEMG recordings with low noise levels. It ensures the removal of body hair, oils, and flaky skin layers and consequently reduces the impedance at the electrode–gel–skin interface. Using an abrasive solution and wetting clean skin with water reduces the impedance of the skin and electrodes. It also minimizes allergic responses [
20].
The surface electrodes are made of silver/silver chloride (Ag/AgCl), which are transducers of the sEMG signal. The Covidien type H124SG Ag/AgCl electrode with a 24 mm diameter is used because this satisfies the requirements of the European Concerted Action Surface EMG for noninvasive assessment of muscle [
21].
The assembly of the electrodes in a bipolar configuration is located between the zone of innervation and the regions of the tendon [
22]. The Myoware sensor electrodes have a distance between electrodes of 30 mm, which are positioned in the middle of the muscle body aligned with the orientation of the muscle fibers on the four muscles: Rectus femoris (RF), Biceps femoris (BF), Tibialis Anterior (TA) and Gastrocnemius (GAS).
The Myoware sensor performs the assignment of conditioning the sEMG signal and the sensor stages are: the input to the AD8226 instrumentation amplifier, rectification, smoothing, and signal amplification.
The sEMG signal is acquired with the myRIO Digital Analogue converter by using the Nyquist–Shanon sampling theorem and a maximum frequency
of the electromyographic signal of 500 Hz, the sampling frequency must be at least
Hz [
23]. Then, the used sampling frequency is of 1 kHz. The signals are filtered using a band-pass filter type butter-worth of fourth order from 10 to 250 Hz to have better information.
4.1. Human Intention
The identification system detects the human intention to execute three different movements. Those movements are getting up from a chair, sitting in a chair and starting walking. The two possible initial positions are sitting or relaxed standing. The system identifies the initial position and then differentiates between getting up from a chair and the other movements with the initial standing position. Being in the relaxed standing position, distinguishes between sitting and walking intentions.
Characteristics of the movements:
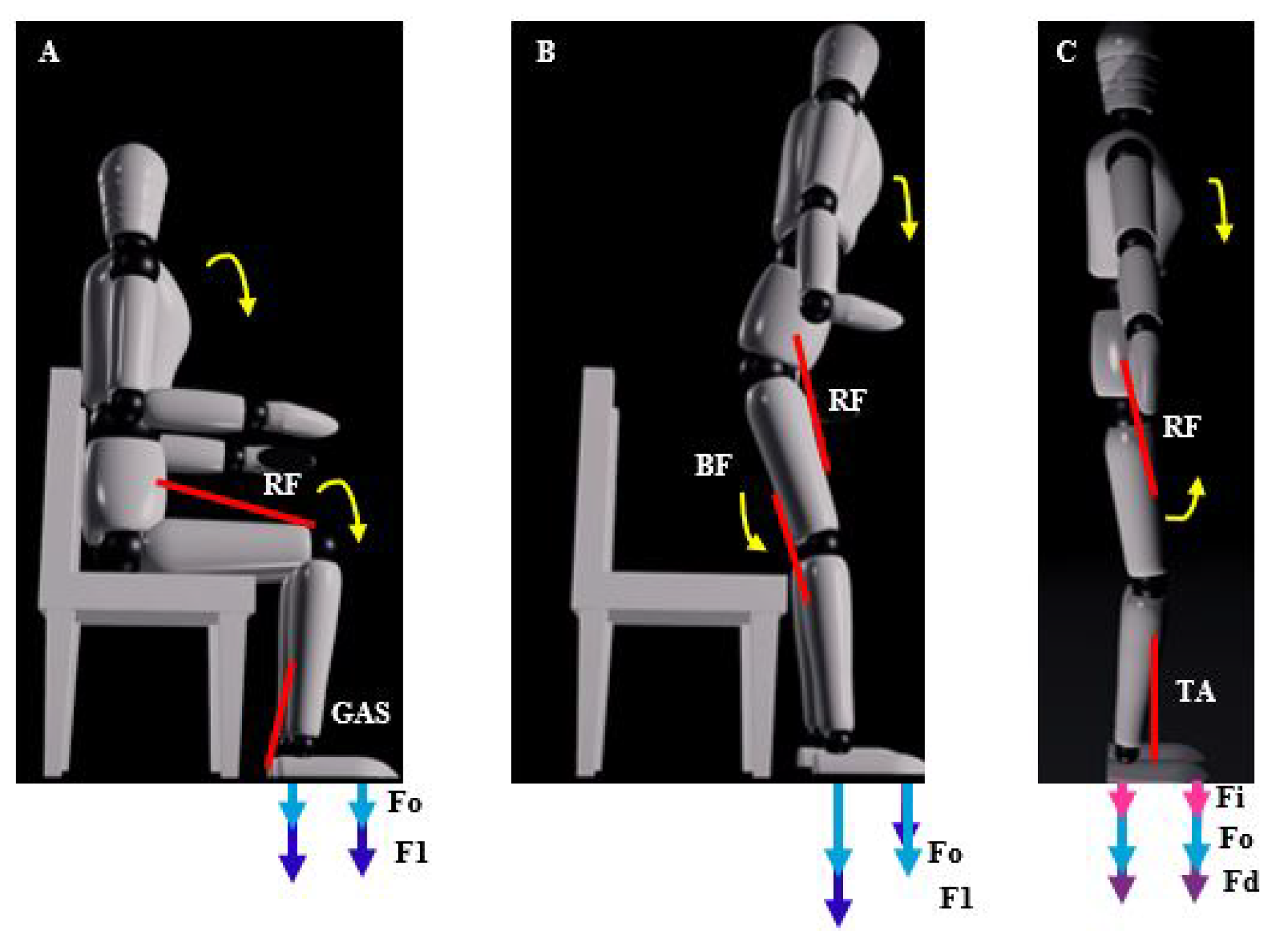
The characteristics of the three movements are described with the activation of the muscles and the ground reaction forces in the front and rear of each foot. is the reaction force of both feet in the starting position. is the initial force to move for both feet. represents the reaction force at the left limb and the reaction force at the right limb.
Getting up from a chair:
In this movement of getting up from a chair, the rectus femoris muscle is an extensor of the knee that contracts and the gastrocnemius muscle contracts to perform the plantar flexion. The ground reaction force behaves like the initial value of
increases to
being higher at the back, generally
, which can be seen in
Figure 9A.
Sitting on a chair:
In the initial movement of sitting on a chair, with respect to the muscles, to flex the hip the rectus femoris contracts and to flex the knee the biceps femoris contracts. With respect to the ground reaction force, the initial value
increases at the back of both feet
and at the bottom of both feet the force
decreases, being the sum equal to the initial reaction force
, which can be seen in
Figure 9B.
Start walking:
In the beginning of walking, with respect to the muscles, for flexion of the hip the rectus femoris contracts and for dorsiflexion the tibialis anterior contracts. With respect to the ground reaction force, the initial value
increases in the part on the supporting foot (in this case on the right foot)
and the force on the left foot
decreases, where
and
, which can be seen in
Figure 9C.
Signal Threshold Detection
The signal threshold detection method uses the physiological description of sEMG signals from the muscles and the physics of FGR sensors found in
Section 4.1.
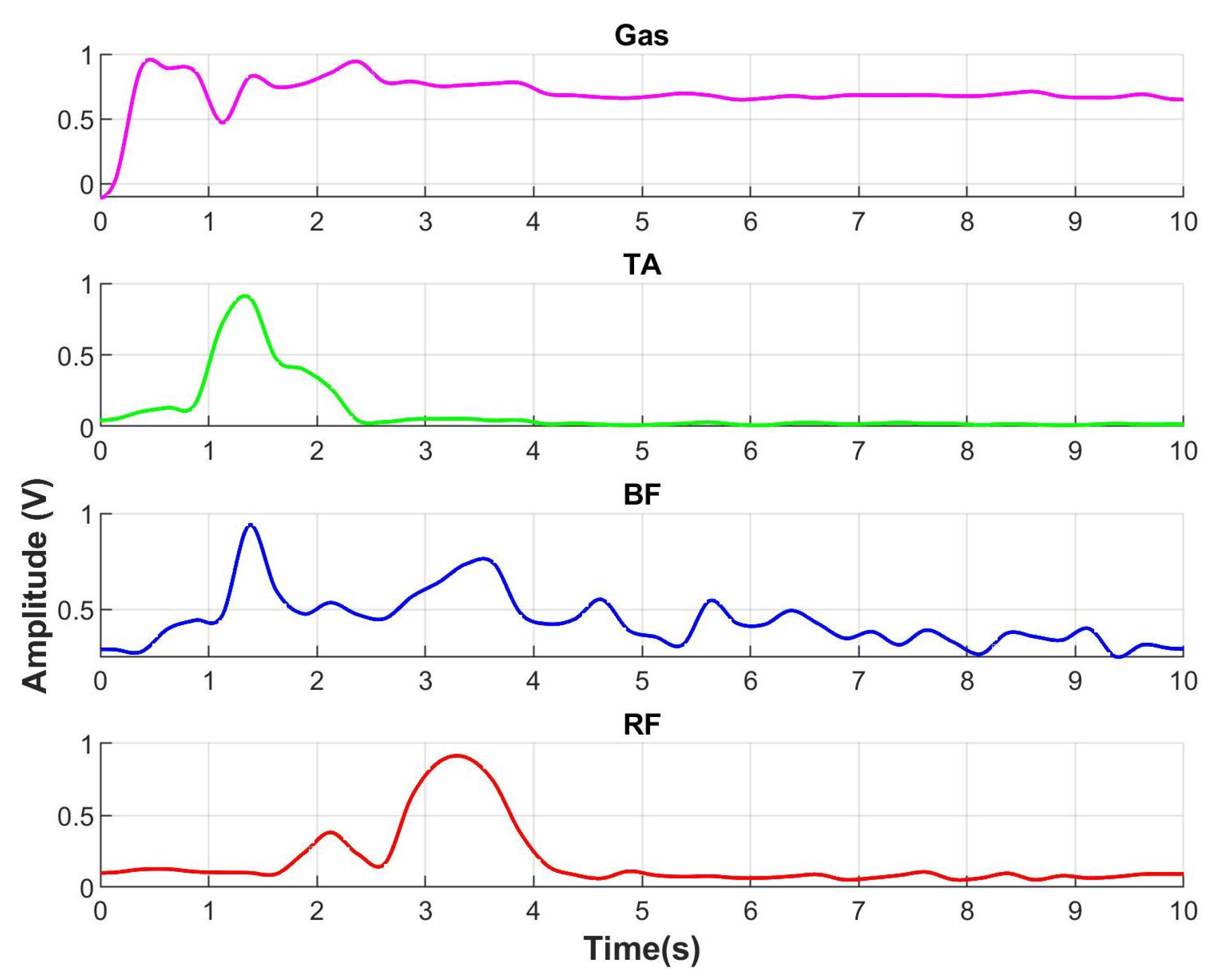
When a person gets up from a chair, the gastrocnemius contracts to perform plantar flexion which is seen in
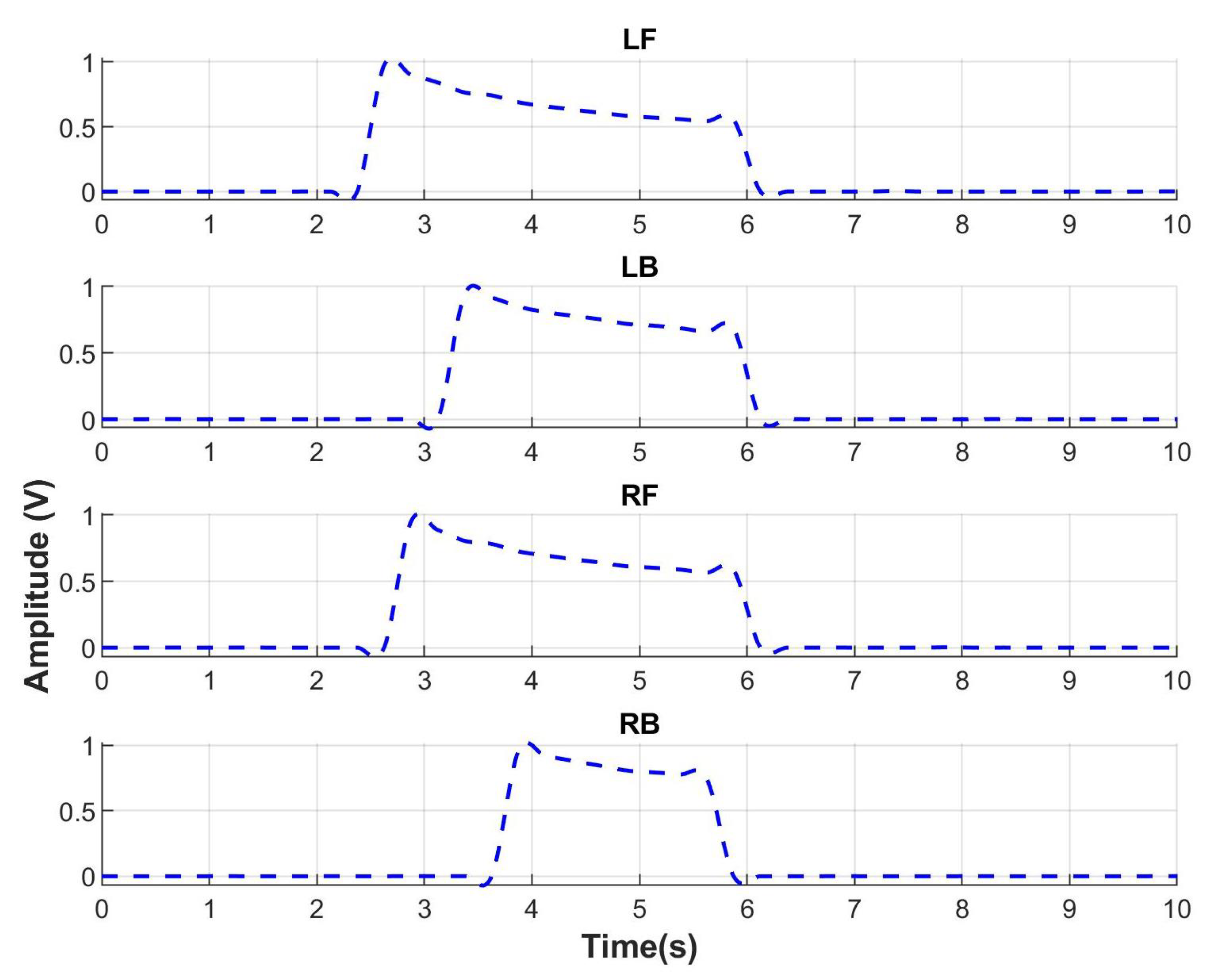
Figure 10. The sEMG for gastrocnemius (line in color pink) starts to increment its amplitude indicating the intention of motion to get up. Then, rectus femoris muscle that is an extensor of the knee contracts indicating the end of the motion. With respect to the ground reaction force in
Figure 11, the FGR signals at the front part of both feet, left front (LF), and right front (RF) start to increase. It indicates the initial force when a person uses the front part of feet to get up.
The identification percentages of the three movement routines are presented in
Table 3. Furthermore, the confusion matrix to evaluate the performance of the detection is shown in
Table 4.
5. Feedback Control
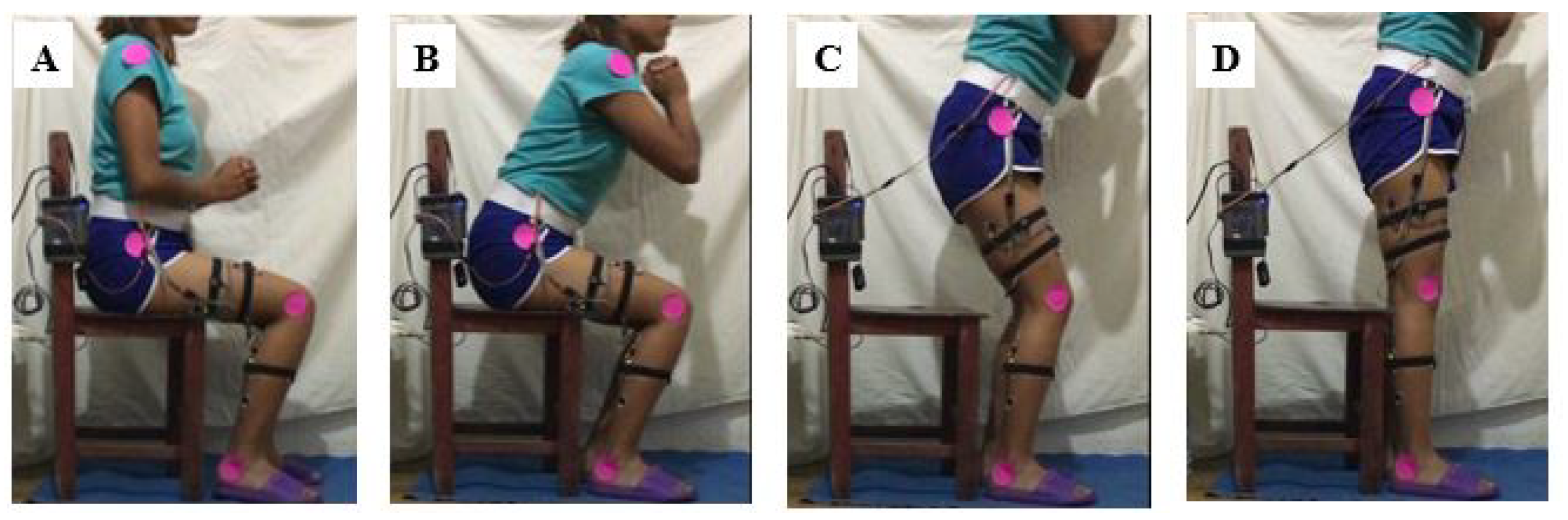
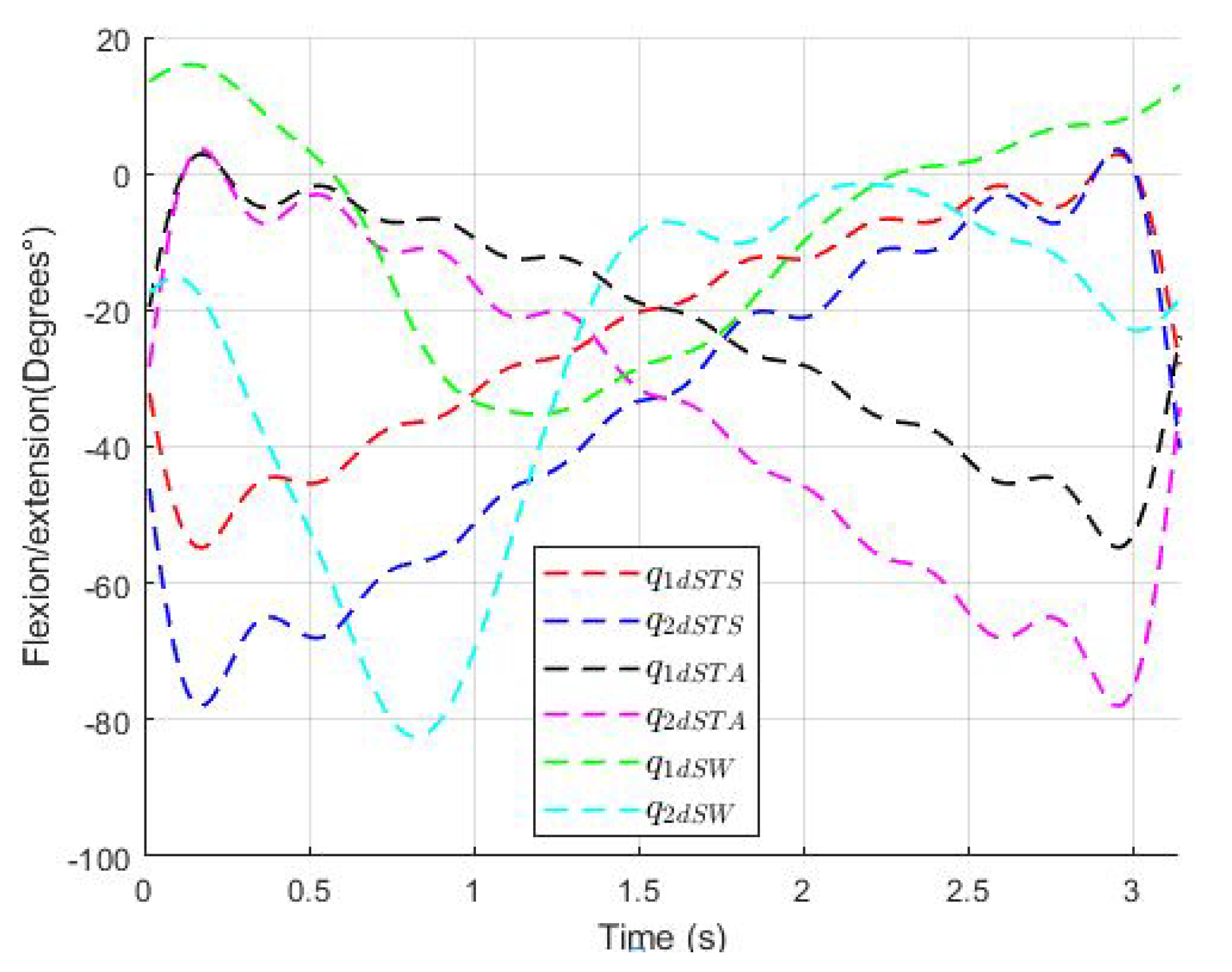
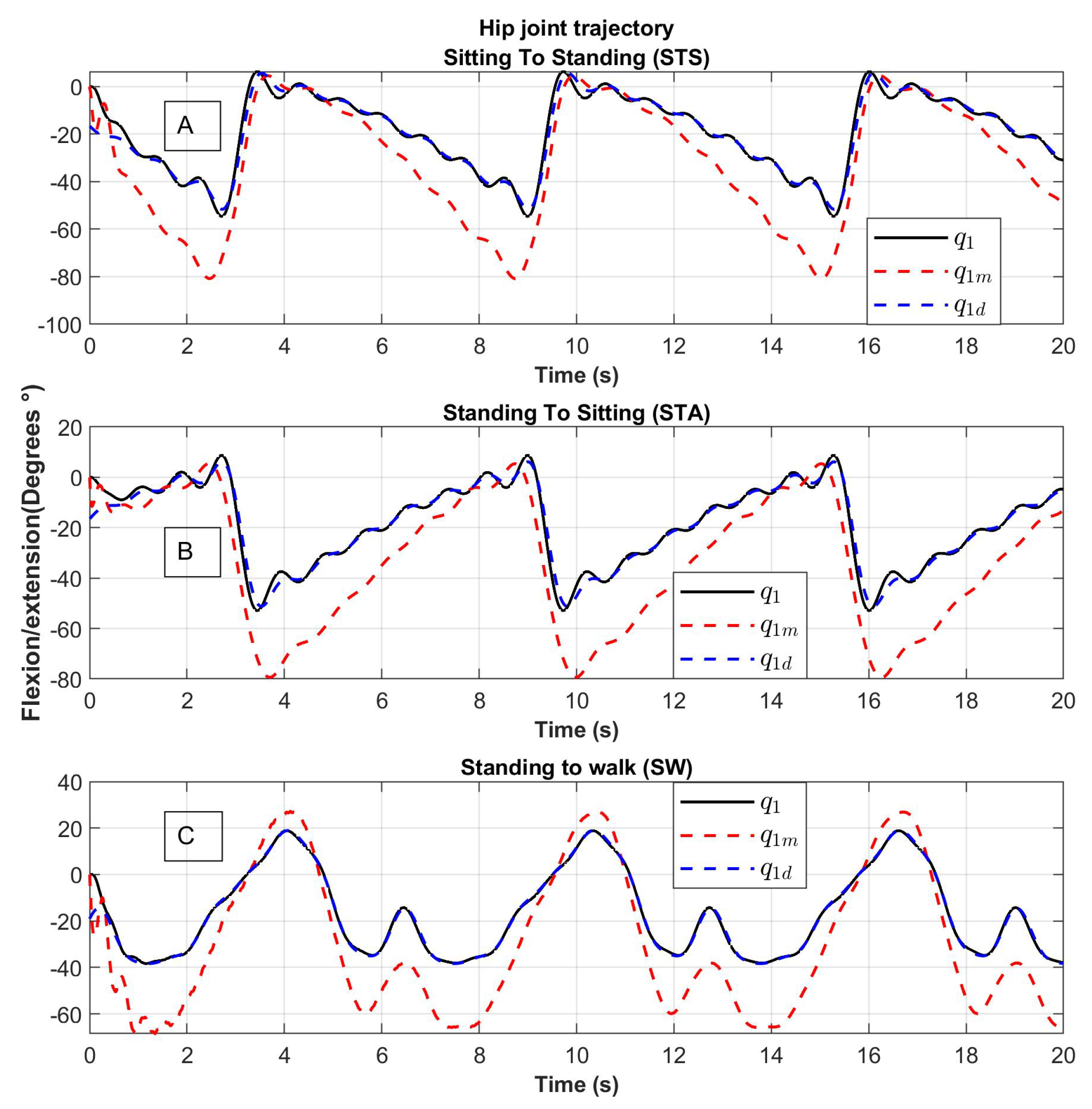
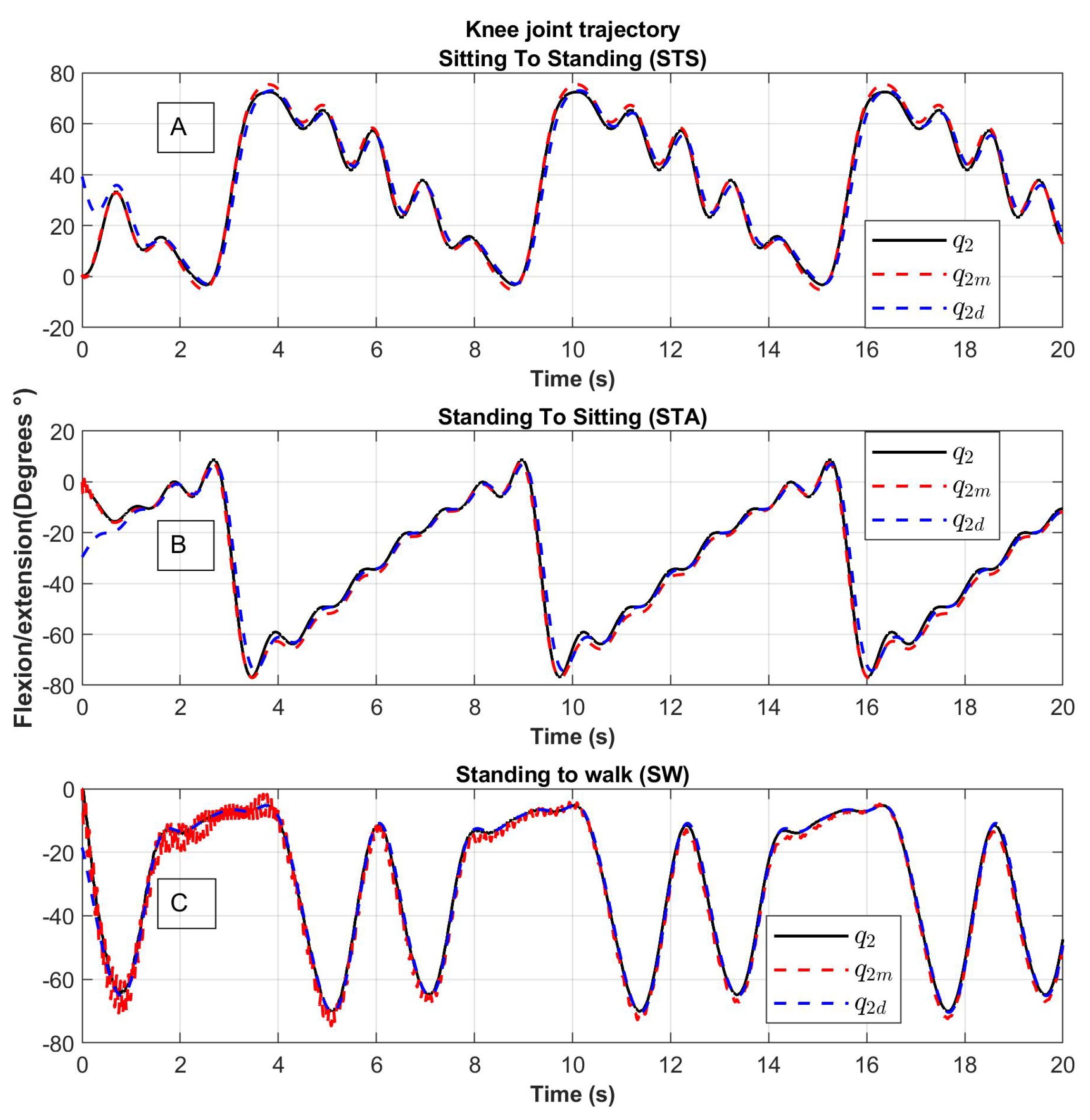
In this section, the control approach is described. Let us remember that: first, the human intention is detected using electromyograpy and baropodometry, then the system chooses which task will be developed (sitting to standing, standing to sitting, or sitting to walk), and selects one of the desired trajectories , or , respectively, which were obtained by video analysis and are already programmed in the exoskeleton’s computer.
To obtain the control law, the system is considered to be connected in a cascade of the dynamics of the robot links and the dynamics of the motors links. The dynamics of the links is actuated by the angles of the motors
through the flexible joints, the dynamics of the motors is actuated by the motor torques
. From Equation (
5), which corresponds to the dynamical model, we have:
The methodology used [
24] considered
as the input of the first equation in (
13) and a control law
∈
is proposed for
as:
where
∈
is diagonal and constant,
where
,
and
∈
,
∈
is diagonal and constant.
Defining
∈
, and substituting in the first equation of (
13) we have:
Lyapunov’s candidate function is chosen as:
The derivative along the trajectories of the system is:
If , then and tend to zero when and as with, so and have zero when .
As a second step,
is considered as the input of the second equation of (
13). Derive
as
and
, substituting the above into (
13) we have:
The proposed control law is:
where
and
are a positive diagonal matrix.
Lyapunov’s candidate function is chosen as:
The derivative along the trajectories of the system is:
where
I is the identity matrix.
If
, then
, from (
16), it follows
then
.
7. Conclusions
A motion intention detection system was obtained using electromyography sensors and ground reaction force sensors that operate as a baropodometry sensor. Four muscles were established whose signals are read by the detection system: the Biceps Femoris (BF), the Rectus Femoris (RF), the Tibialis Anterior (TA) and the Gastrocnemius (GAS).
The human intention detection system has a performance of 90% of correct detection. In addition, the performance metrics show an average precision of 0.9, indicating a good performance of the system.
An important contribution of this paper is to show an effective way to obtain the human intention using electromyography and baropodometry signals. However, sensing the intention of movement mechanically is essential for other types of active exercises. For this reason the exoskeleton was designed with this type of flexible actuators containing a torque sensor.
The required trajectories for motion in an exoskeleton’s joints were obtained from the analysis of movement of different videos, which were approximated by trigonometric polynomials. The trajectories in the implementation of the exoskeleton control were suitable for 3D-CAD motion.
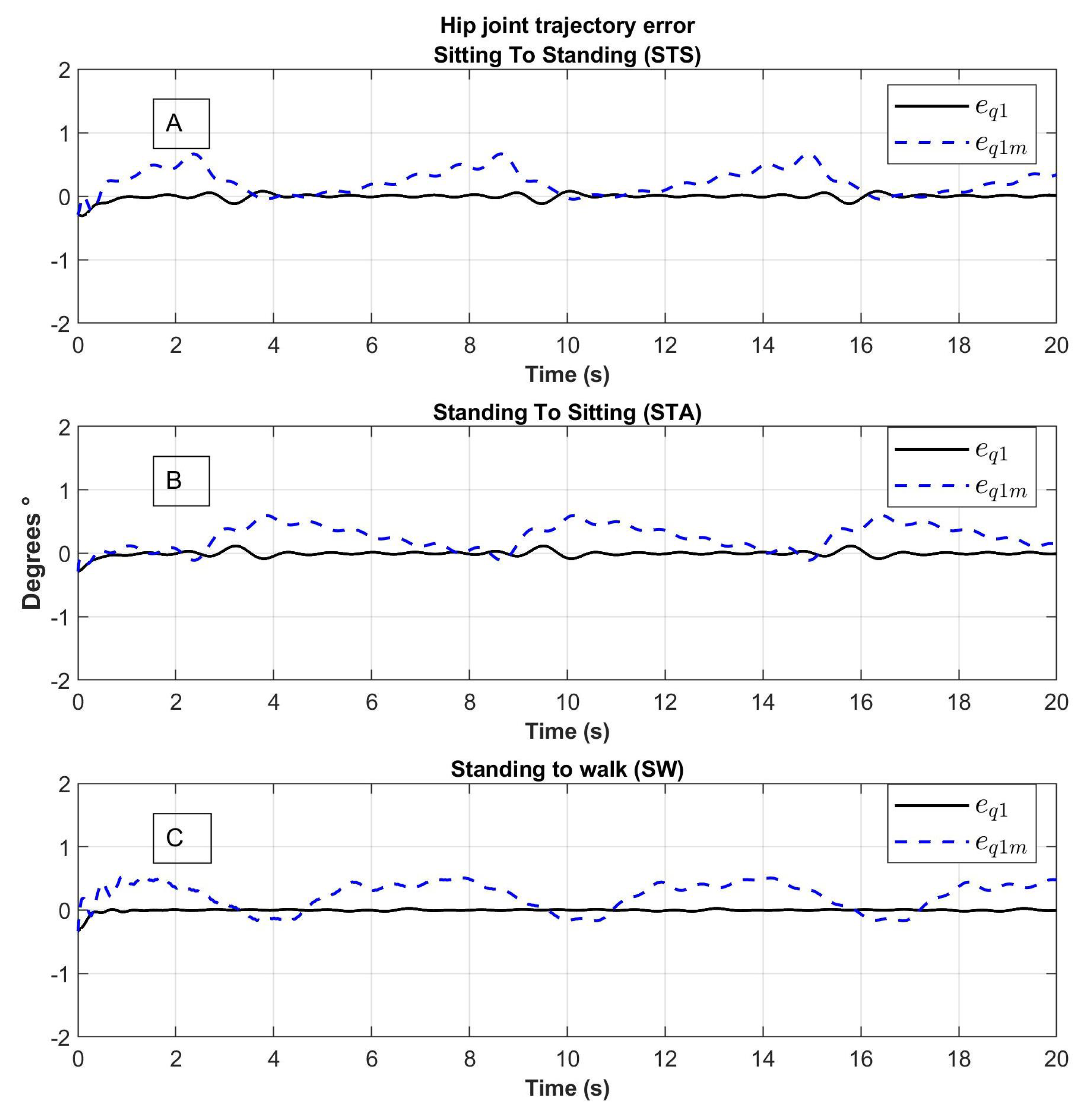
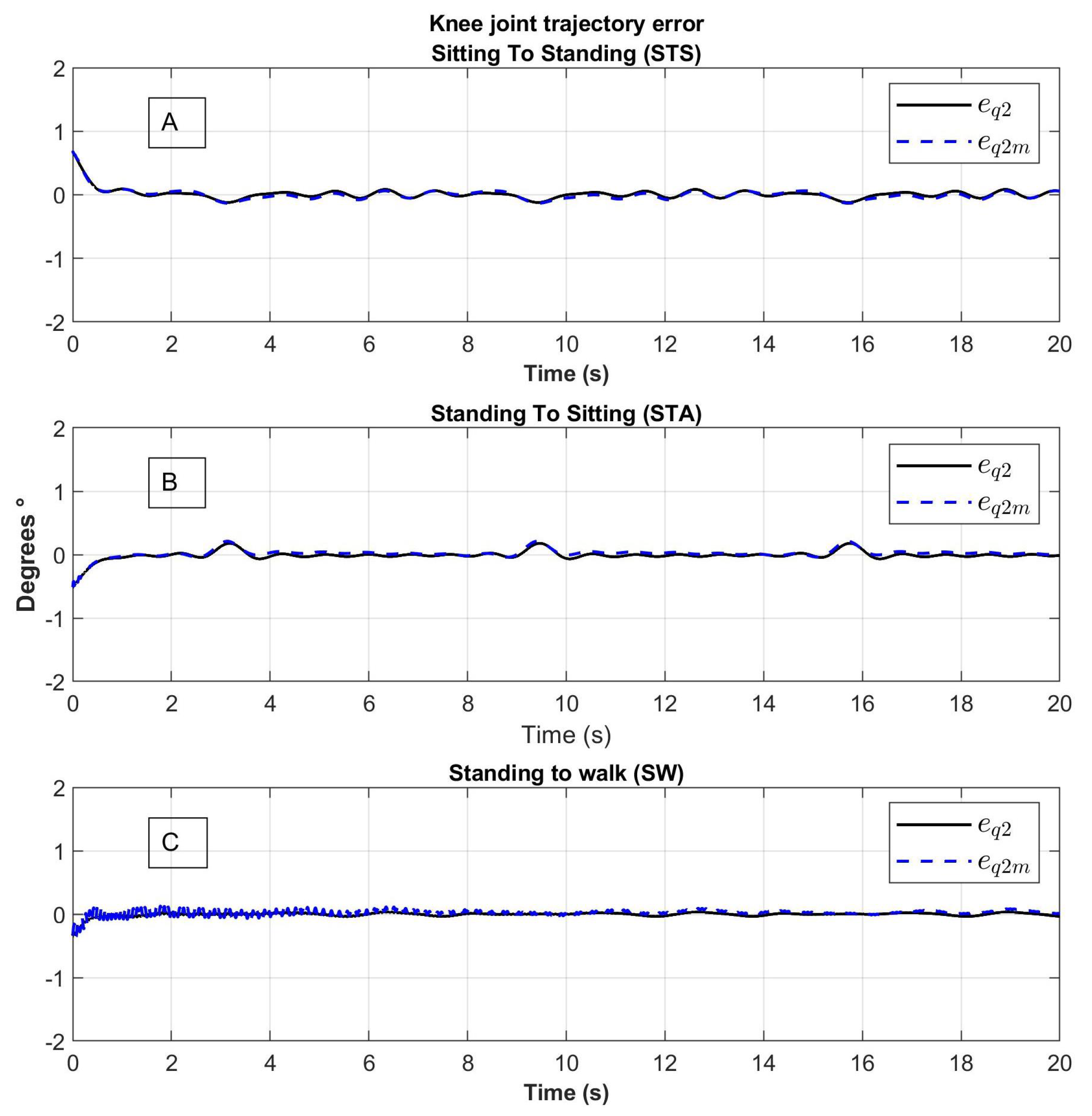
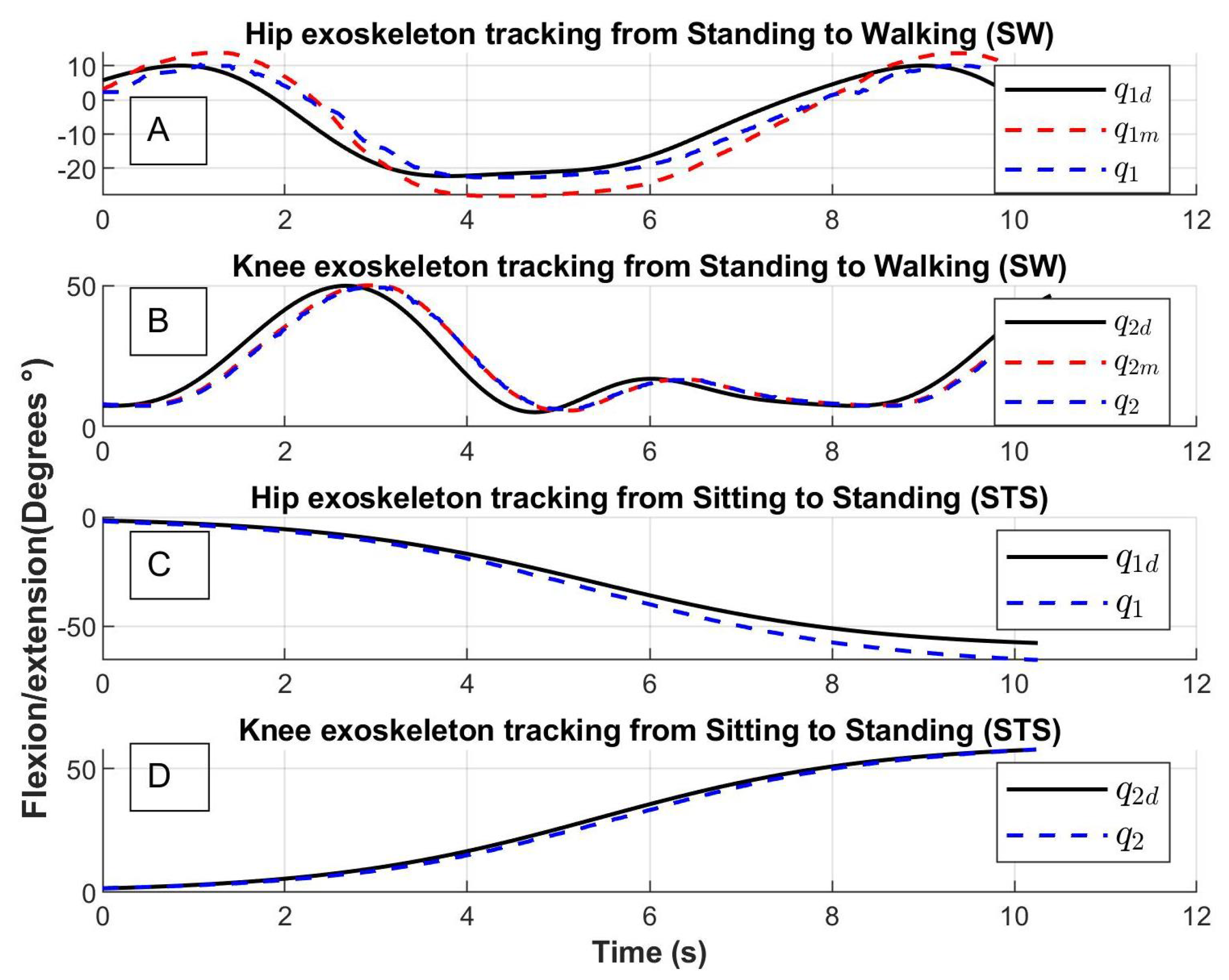
The proposed control law is based on the exoskeleton dynamic model; this exoskeleton mobilizes the hip and knee joints. The implemented control has a good performance for tracking trajectory, which means that tracking errors tend to zero. In fact, when a rehabilitation is performed, the most convenient is to adjust the control gains, this action is very simple, only tuning the gains in the sense of closed-loop stability ( must be positive and ). The error in the link model is smaller than in the motor model, which is explained by the dynamics of the elastic joints in motors.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}