
Detection and Classification of Cotton Foreign Fibers Based on Polarization Imaging and Improved YOLOv5

Abstract
:1. Introduction
- A polarization imaging device of cotton foreign fiber was constructed using line laser polarization imaging technology.
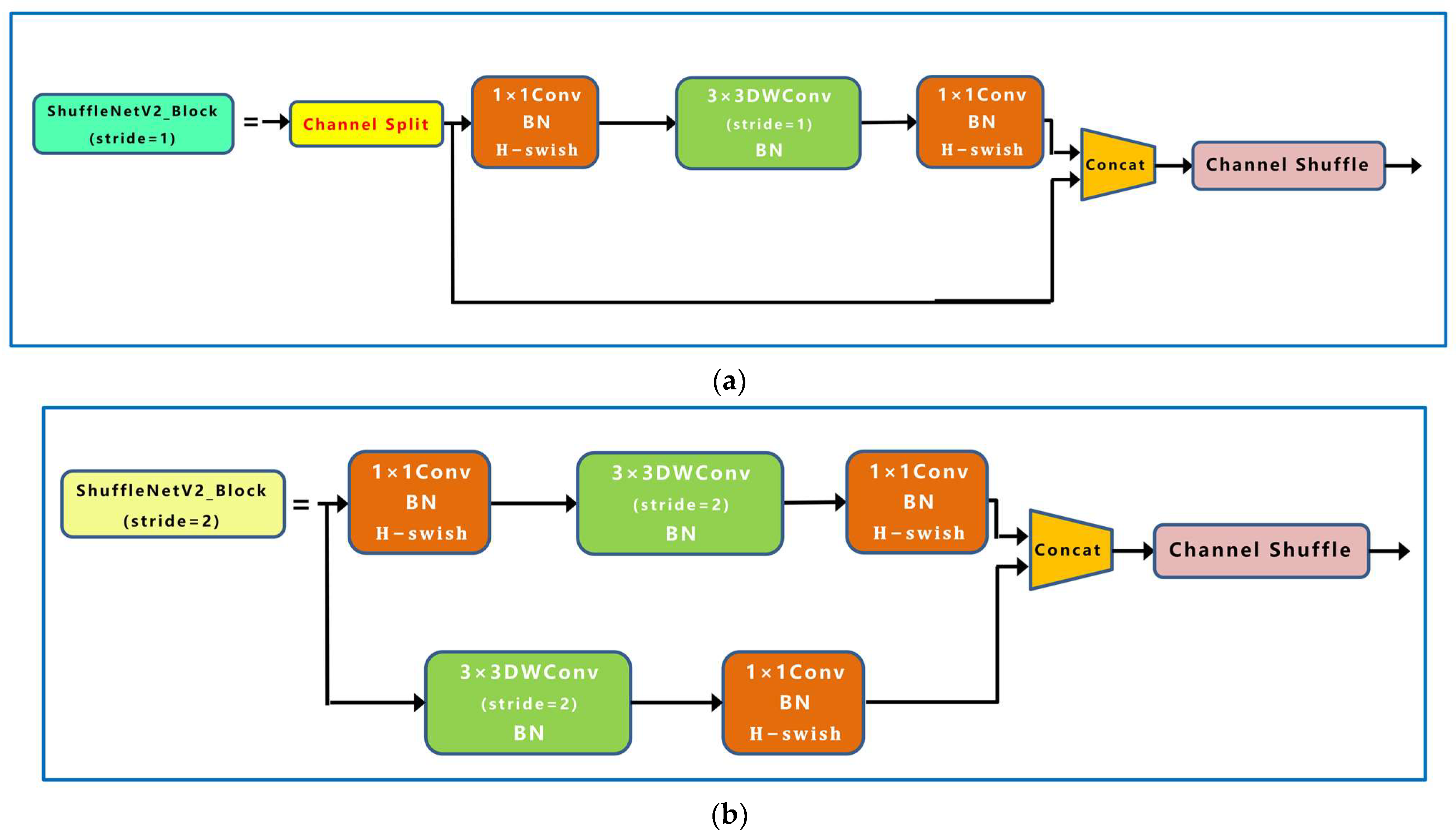
- In order to reduce the model volume and improve the detection speed, the lightweight network Shufflenetv2 with Hard-Swish function was added as the backbone feature extraction network.
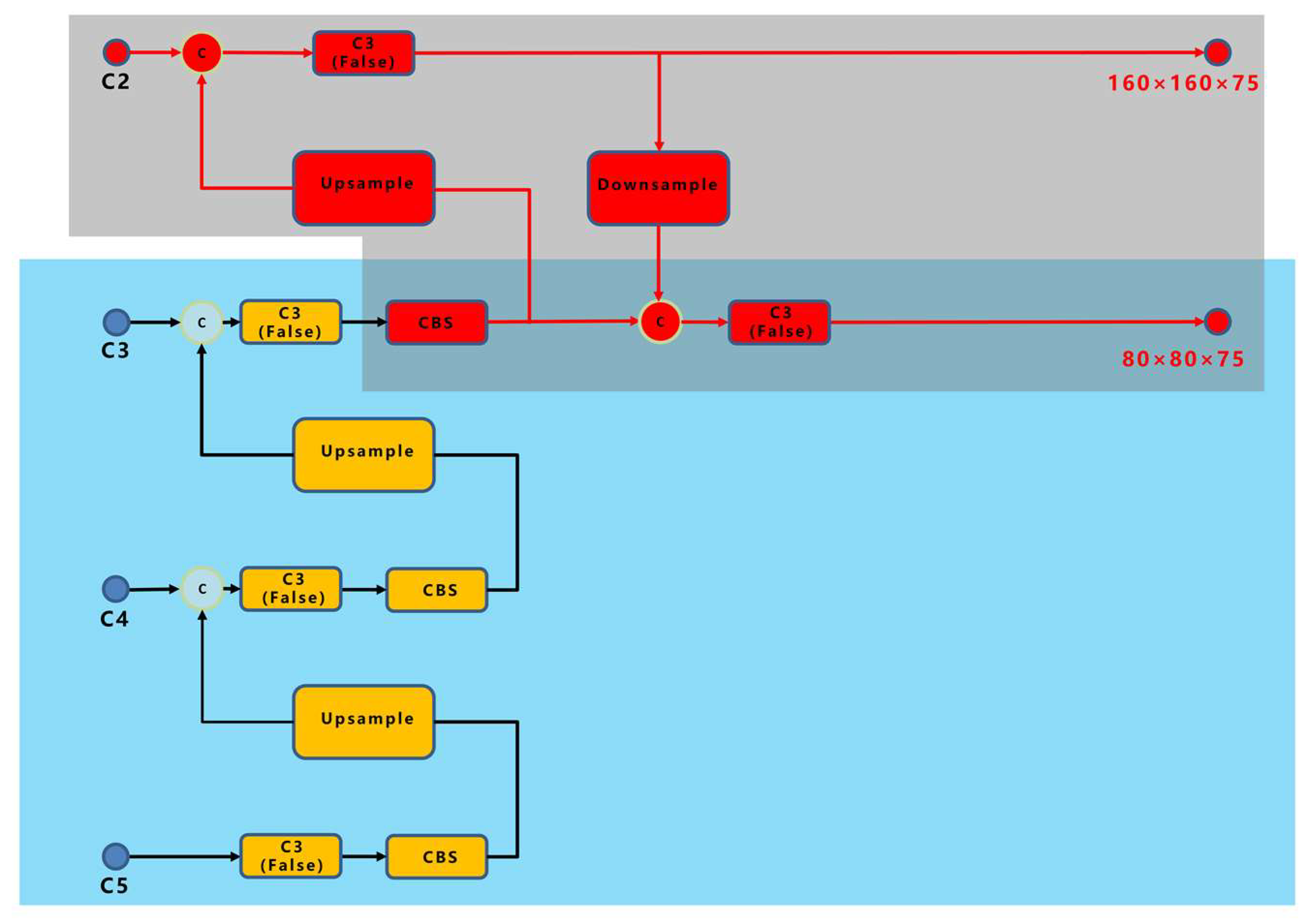
- In order to increase the detection accuracy of foreign fibers in small targets, an improved PANet was added to YOLOV5.
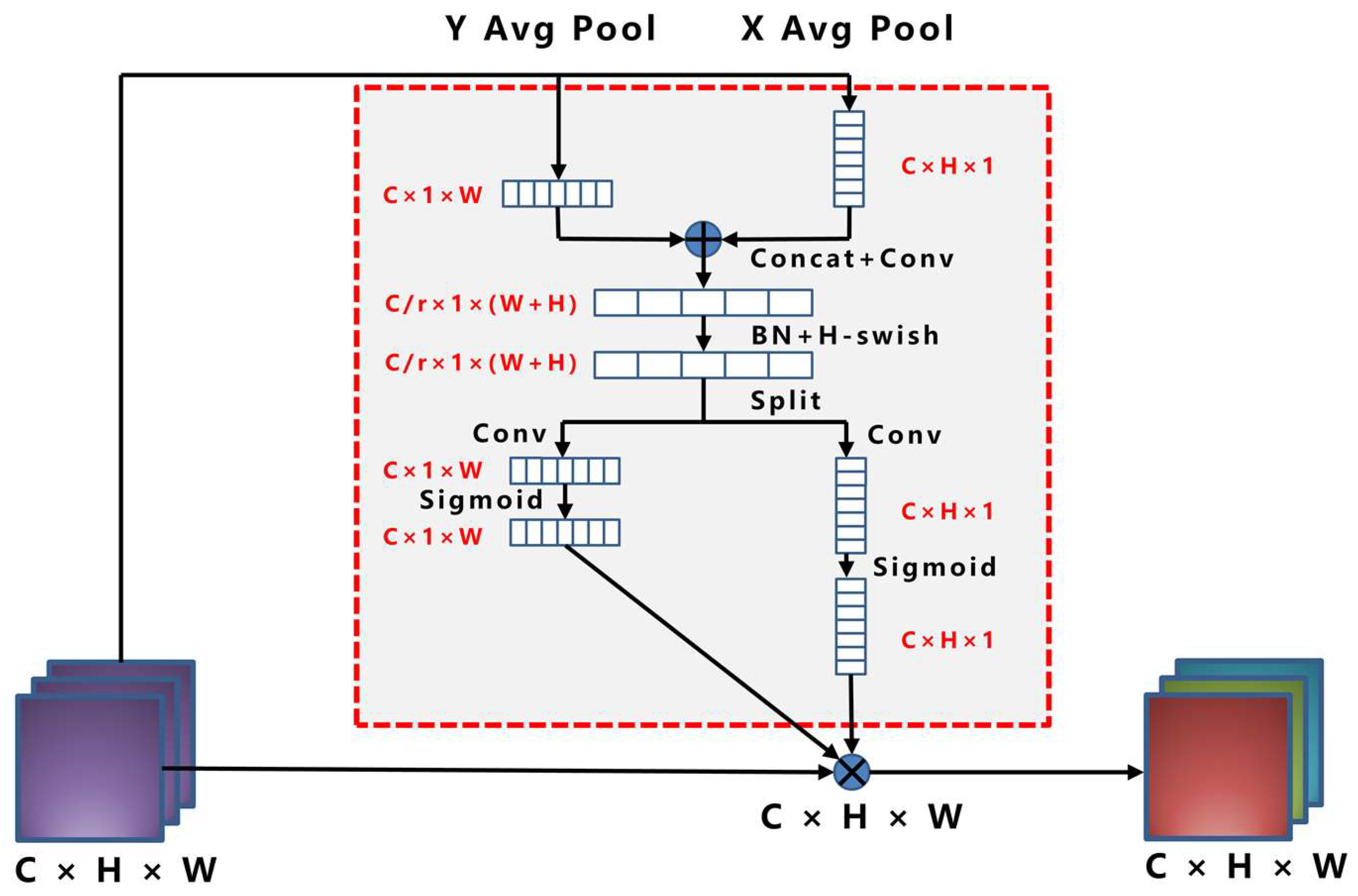
- The CA module was added before the Head of YOLOv5 to allocate the weight of the channel features and spatial features to improve the accuracy of foreign fiber recognition and classification.
2. Materials and Methods
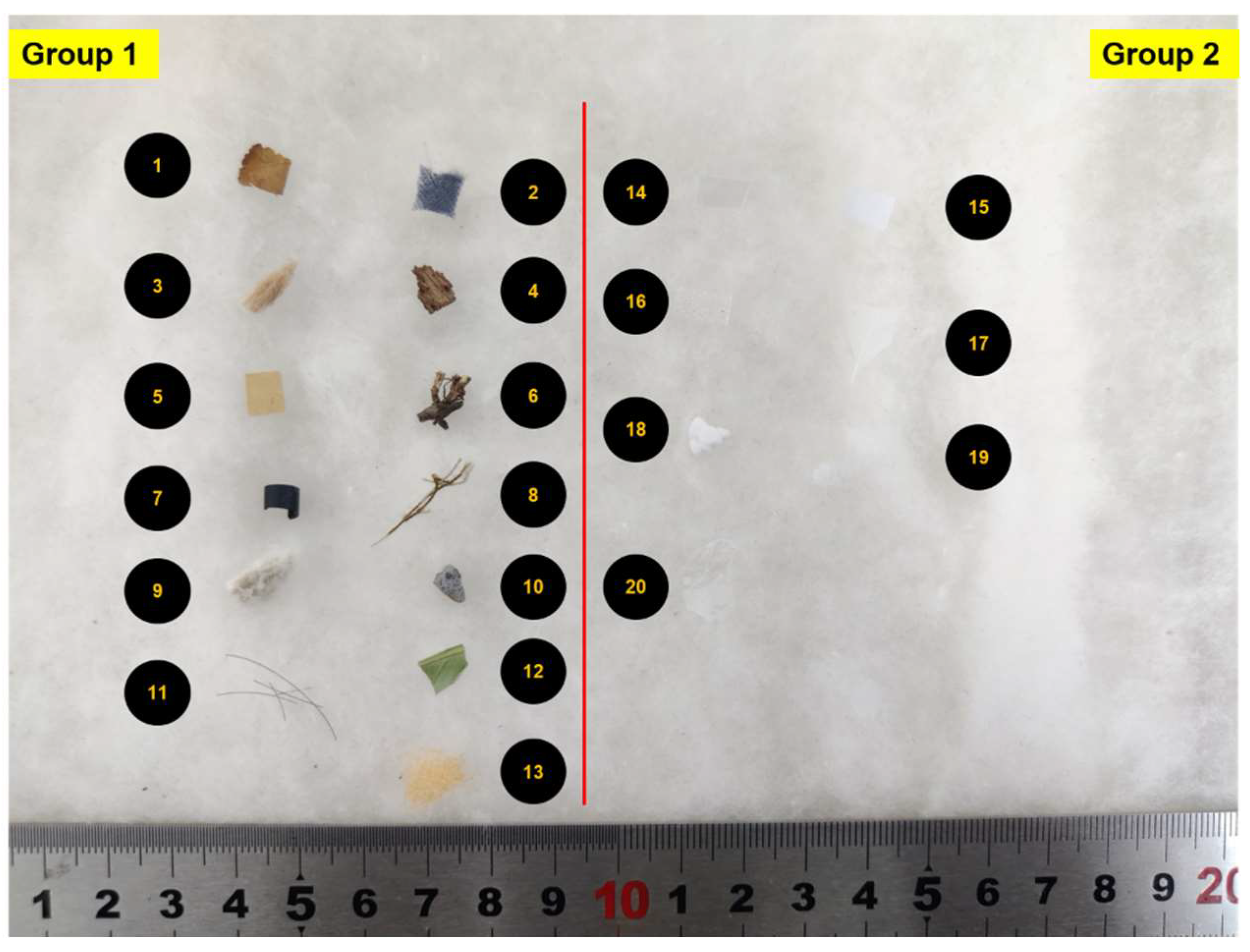
2.1. Experiment Materials
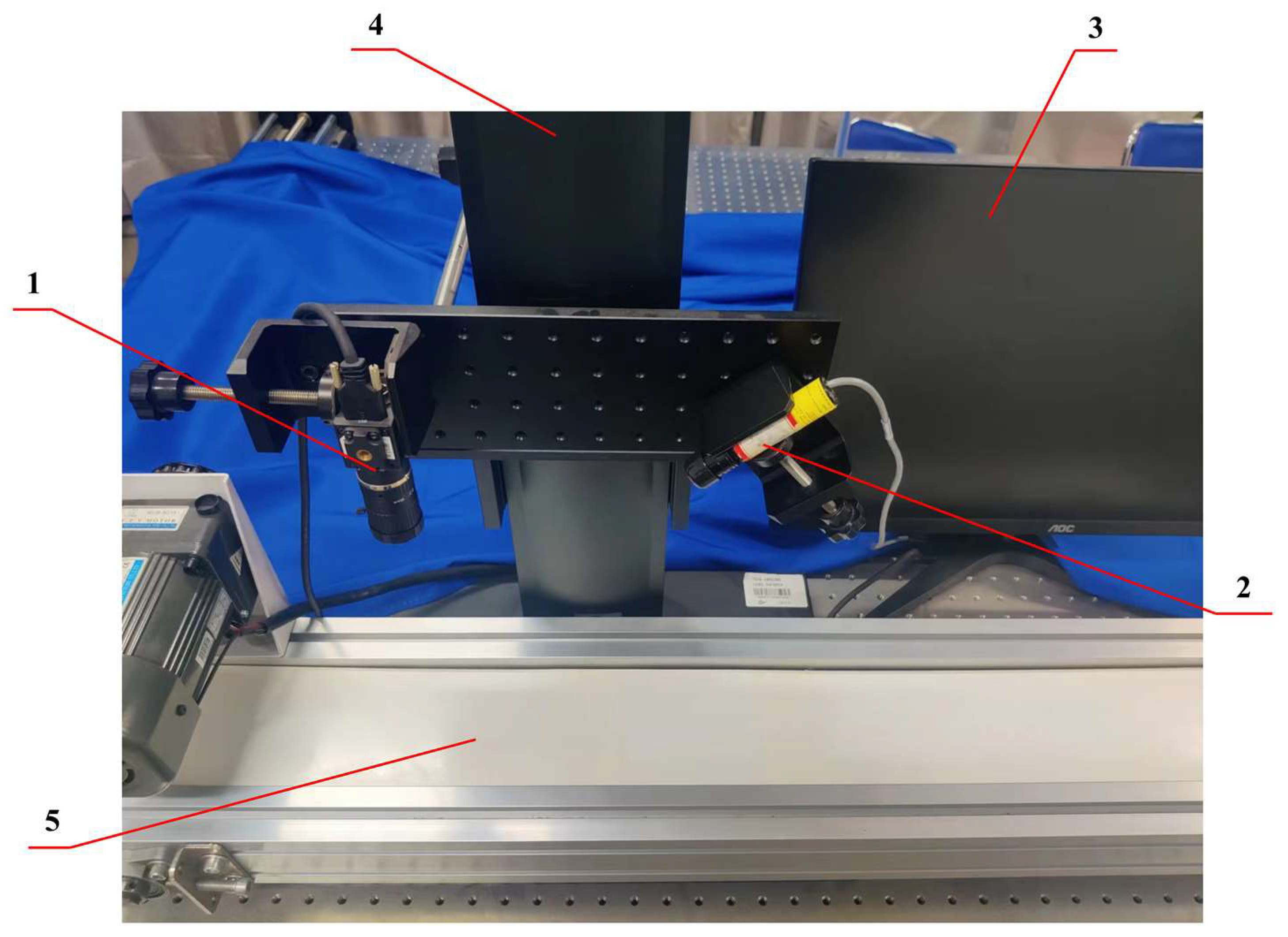
2.2. Experiment Equipment
2.3. Dataset, Environment, and Parameters
2.4. Loss Function and Model Evaluation Metrics
2.5. Improvement of YOLOv5 Network Architecture
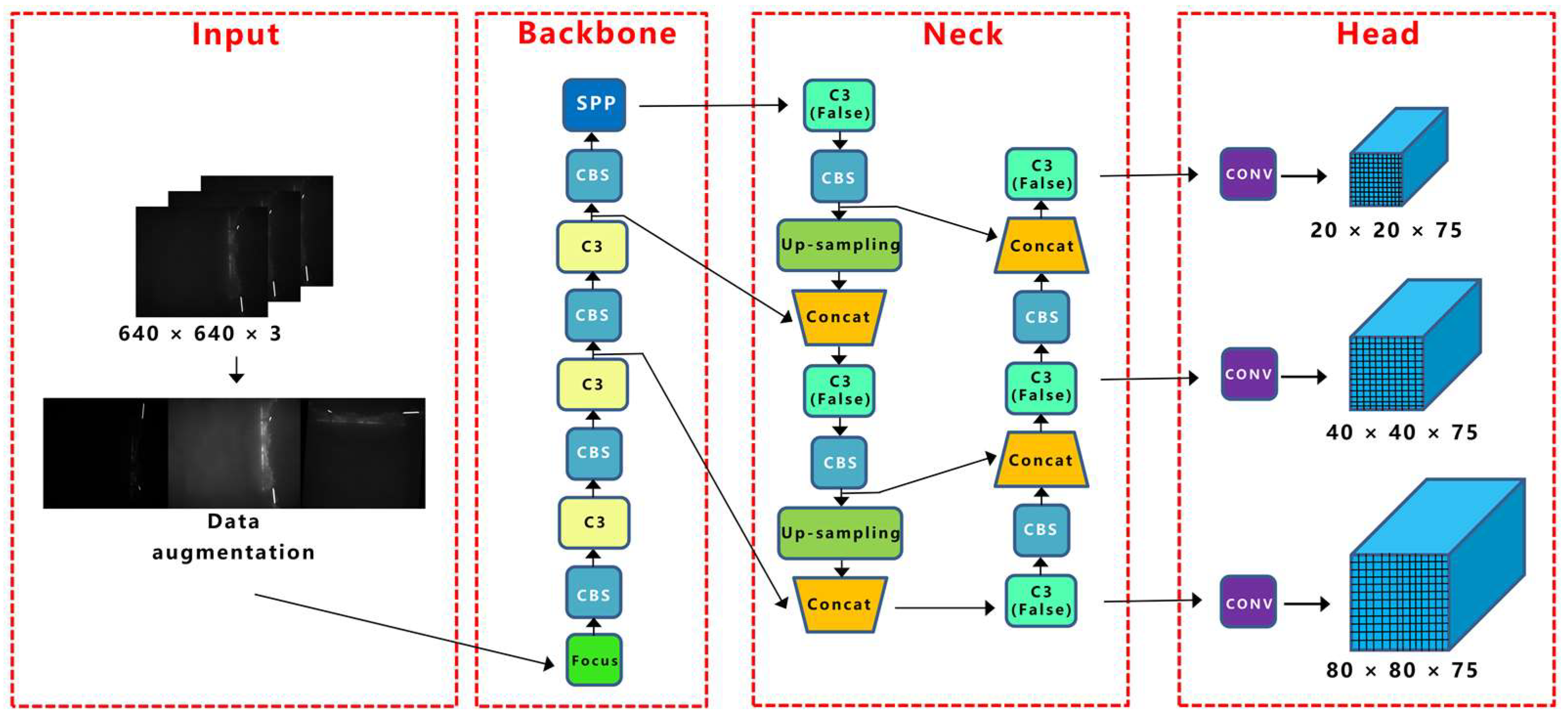
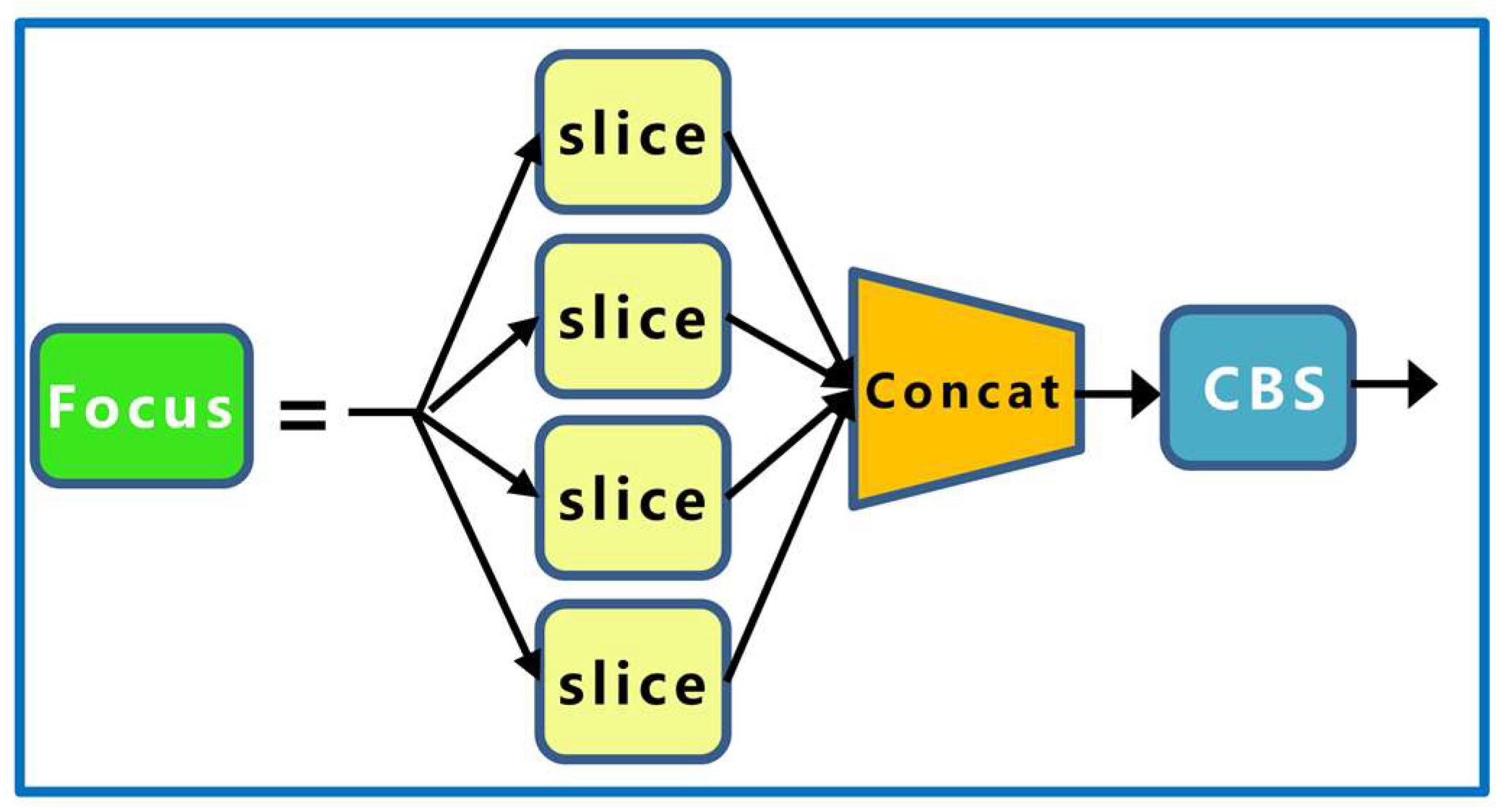
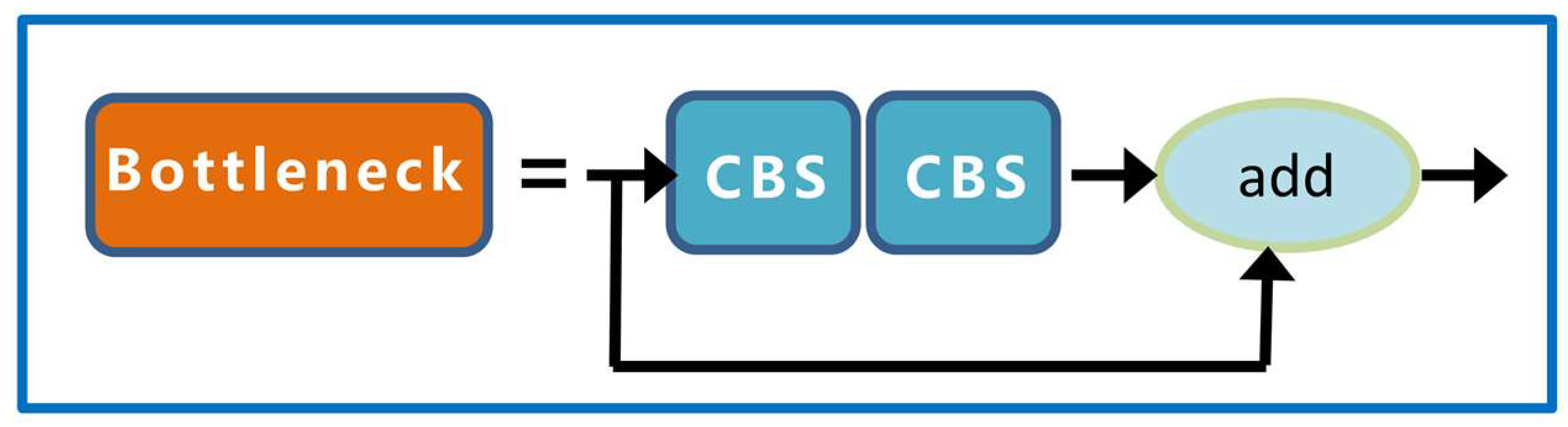
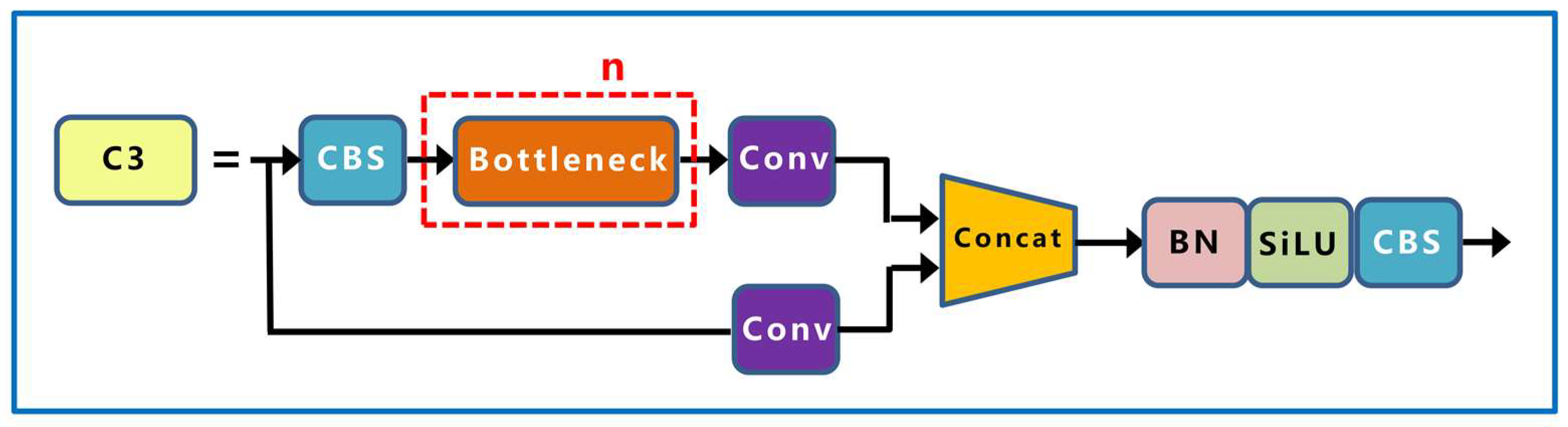
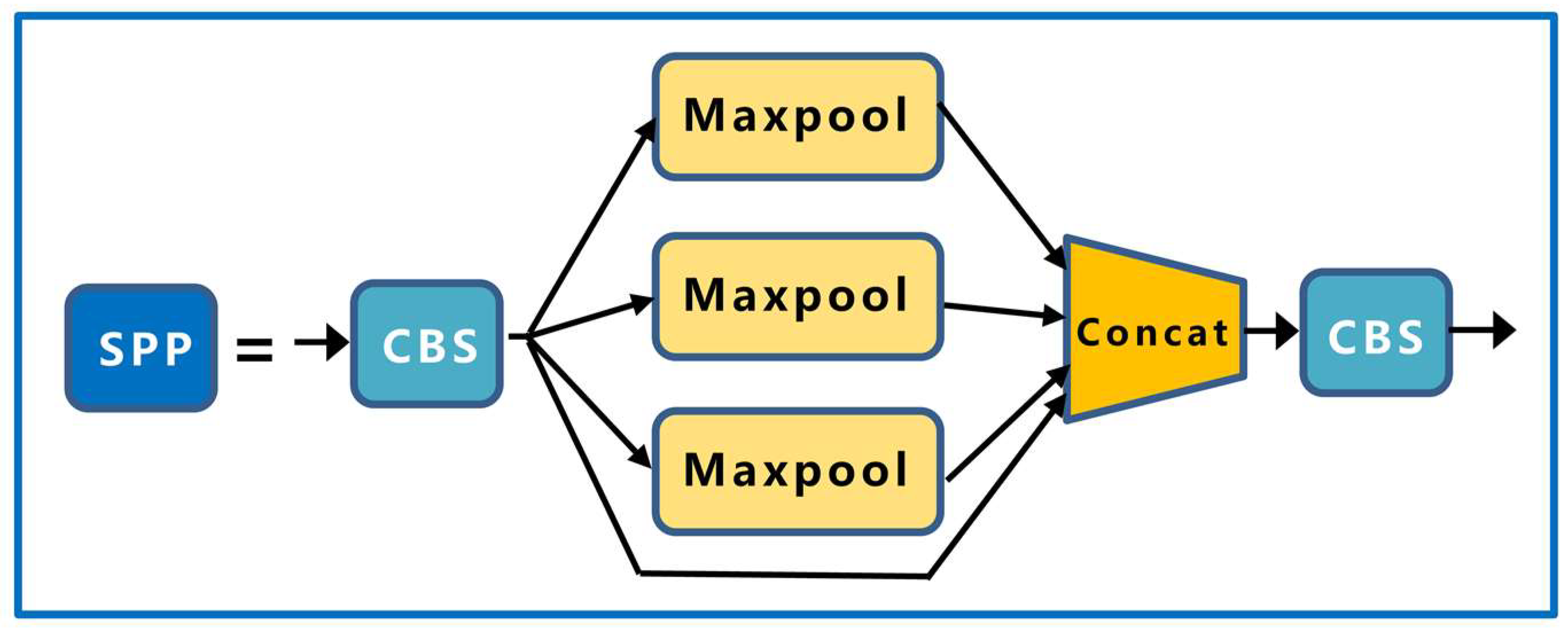
2.5.1. YOLOv5 Network Architecture
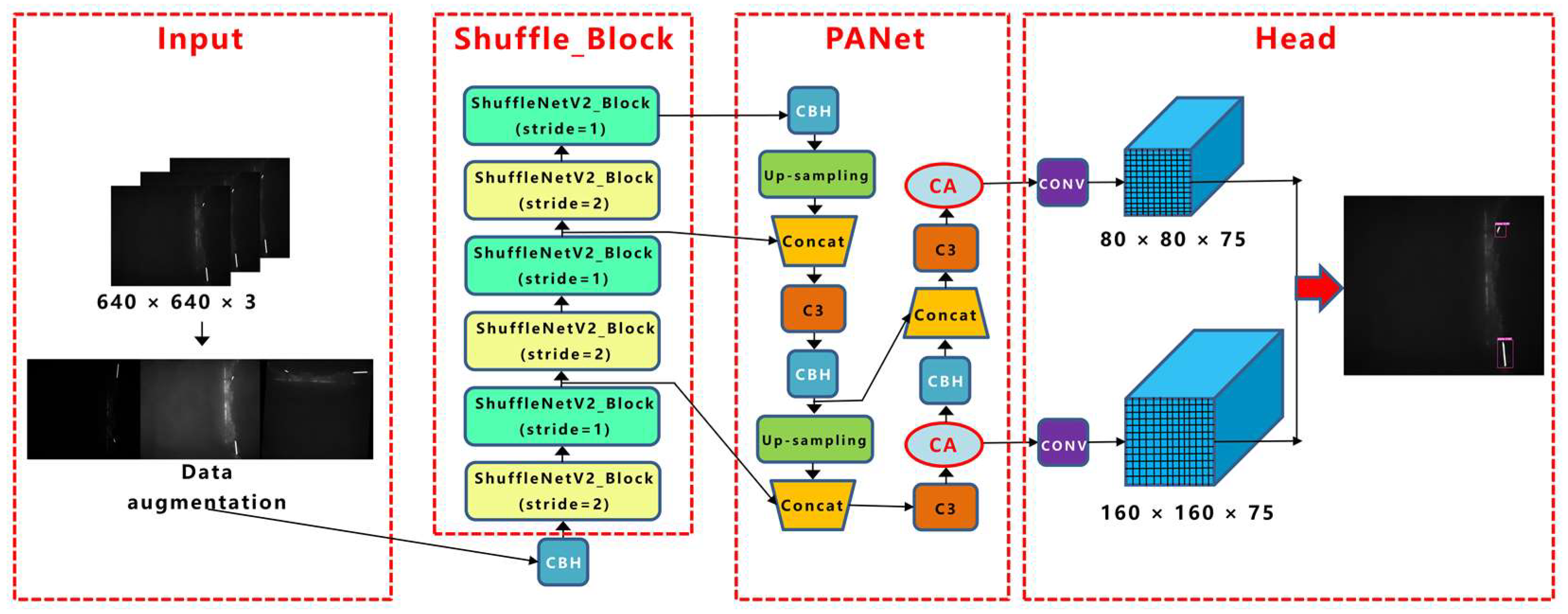
2.5.2. Proposed Approach: YOLOv5-CFD
Improvement of Backbone Network
Improvement of PANet Network
CA Module Design
3. Results and Discussion
3.1. Ablation Experiment
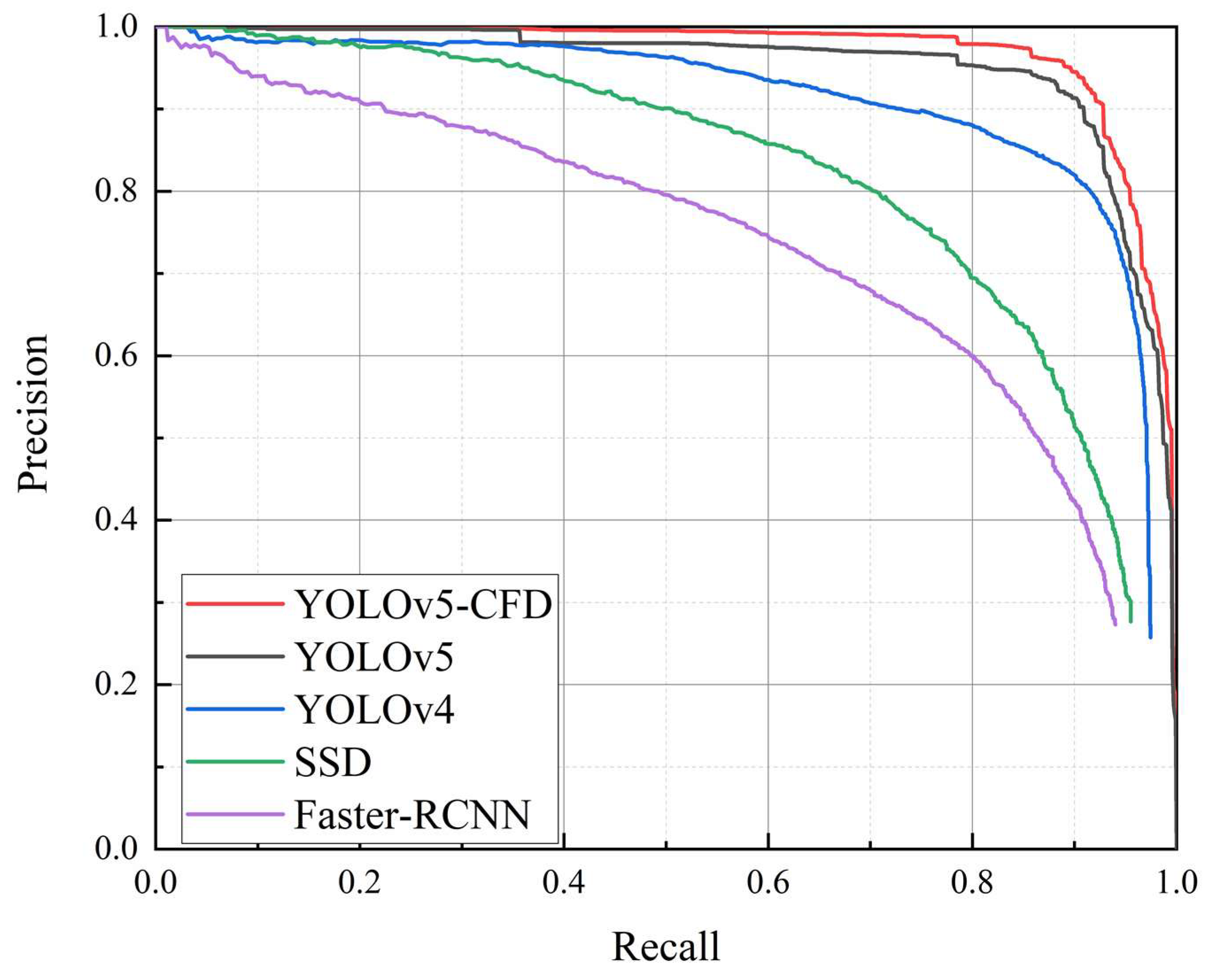
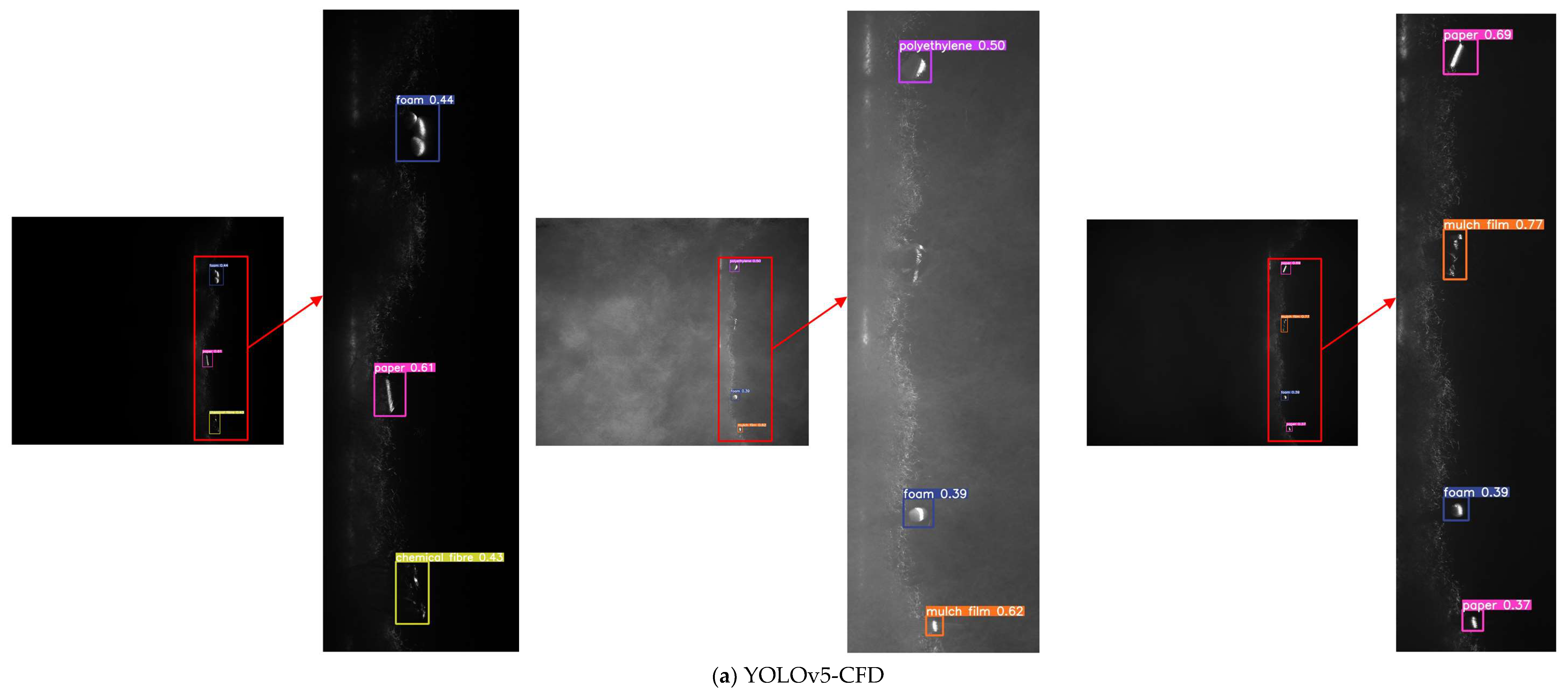
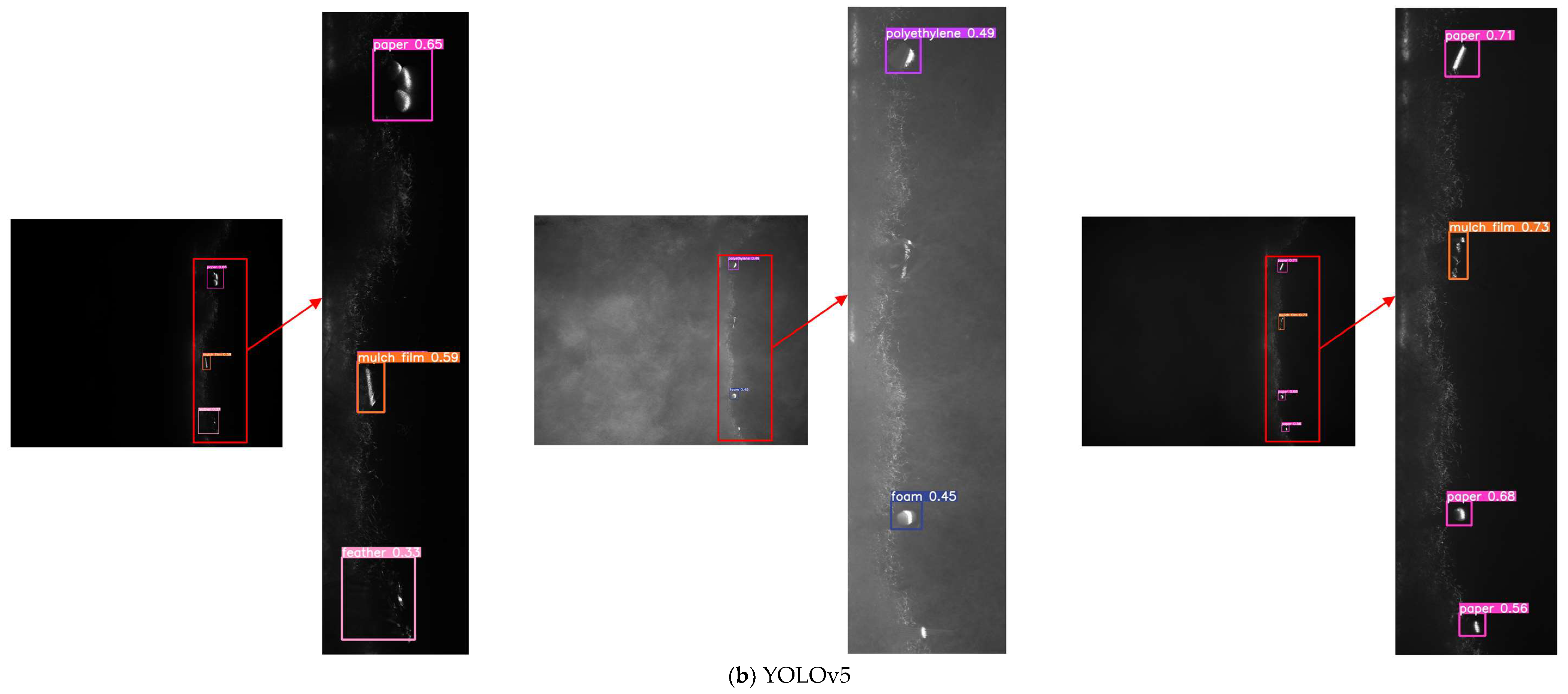
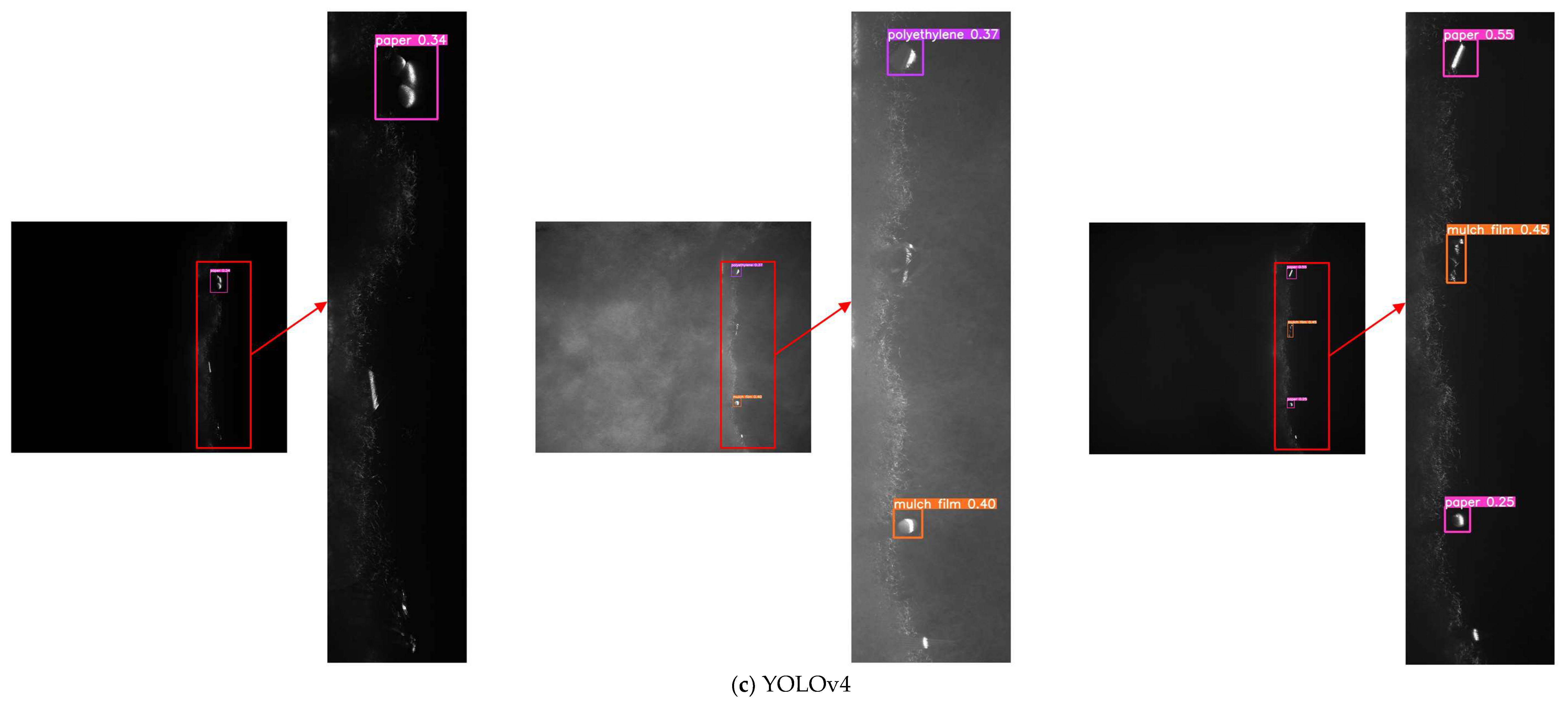
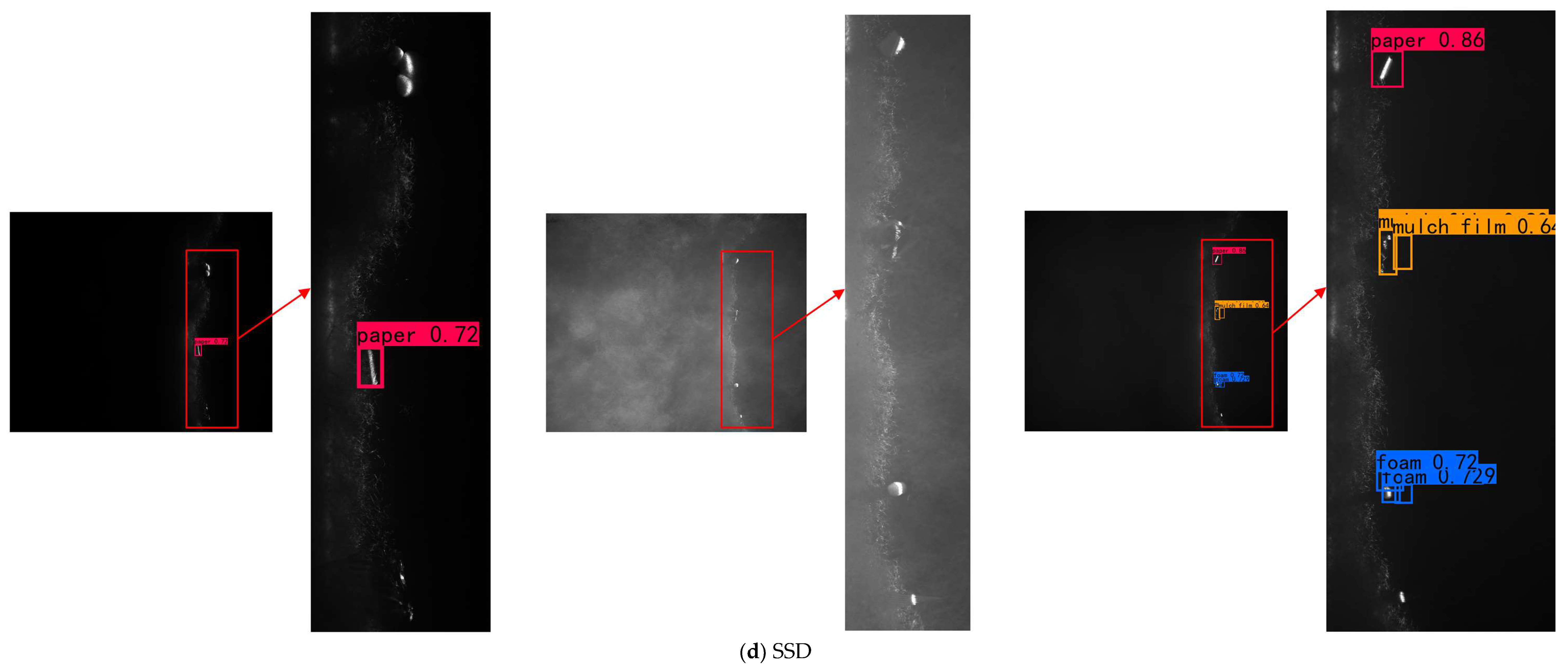
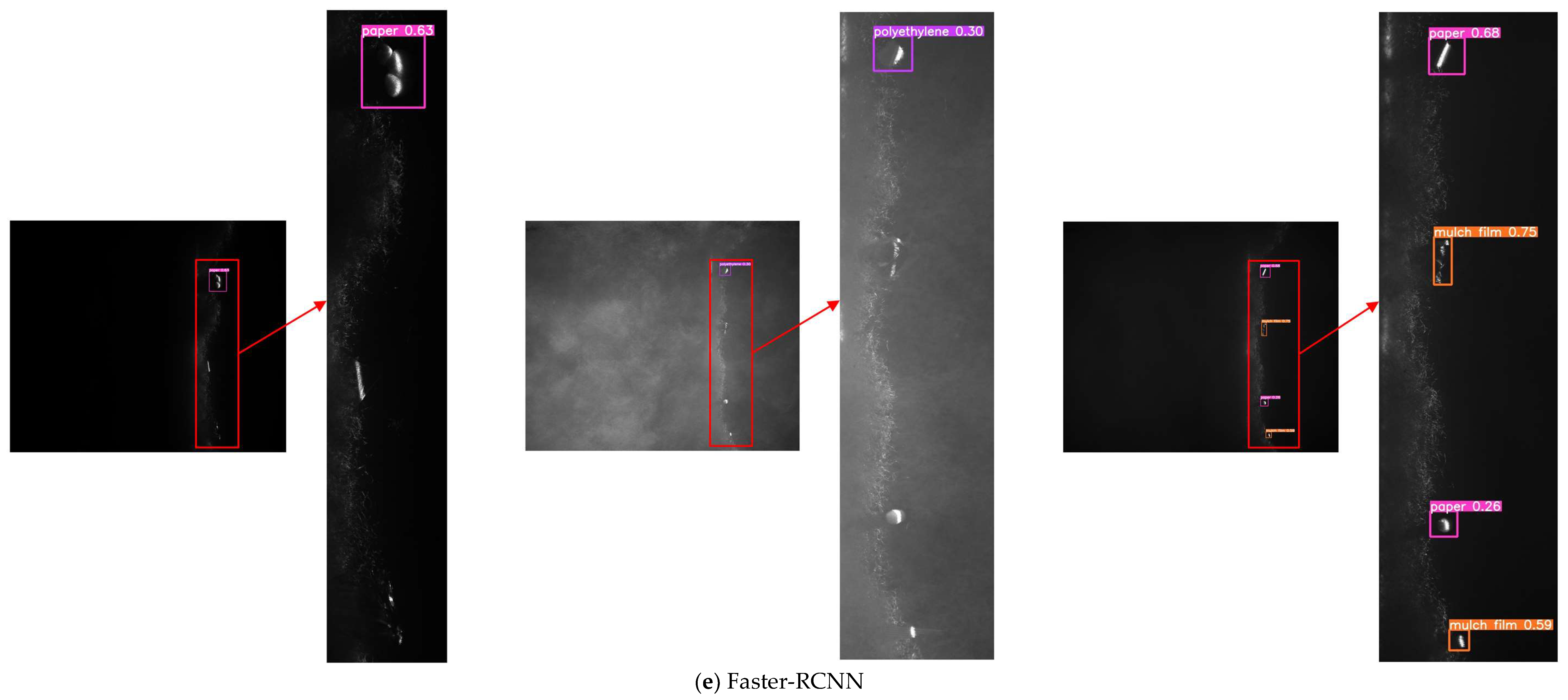
3.2. Comparison of Different Models
3.3. YOLOv5-CFD Test Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, B. Research on the testing technology of cotton foreign fiber content. Mod. Bus. Trade Ind. 2018, 39, 185–186. [Google Scholar]
- Zhang, H.; Li, D. Applications of computer vision techniques to cotton foreign matter inspection: A review. Comput. Electron. Agric. 2014, 109, 59–70. [Google Scholar] [CrossRef]
- Yang, W.; Li, D.; Zhu, L.; Kang, Y.; Li, F. A new approach for image processing in foreign fiber detection. Comput. Electron. Agric. 2009, 68, 68–77. [Google Scholar] [CrossRef]
- Yue, X. Research on Multi-Parameter Optimization of Heterogeneous Fiber Sorting Machine Detection Rate Based on Neural Network. Master’s Thesis, Tianjin Polytechnic University, Tianjin, China, 2020. [Google Scholar]
- Shi, G. Remark upon foreign matter online detecting and clearing. Shanghai Text. Sci. Technol. 2007, 35, 24–25. [Google Scholar]
- Chang, L. The Detecting System of Foreign Fibers in Cotton Based on DSP. Master’s Thesis, Hefei University of Technology, Hefei, China, 2006. [Google Scholar]
- Guo, S.; Kan, Z.; Zhang, R.; Guo, W.; Cong, T. Separation test of electrostatic separating device for machine-harvested seed cotton and plastic film residue. Trans. Chin. Soc. Agric. Eng. 2011, 27, 6–10. [Google Scholar]
- Chen, Y.J.; Wu, T.R.; Shi, S.W.; Zhao, B.; Yang, S.H. Review of Cotton Foreign Fiber Detection Method Using Optical Imaging. Laser Optoelectron. Prog. 2021, 58, 1600007. [Google Scholar]
- Pai, A.; Sari-Sarraf, H.; Hequet, E.F. Recognition of cotton contaminants via X-ray microtomographic image analysis. IEEE Trans. Ind. Appl. 2004, 40, 77–85. [Google Scholar] [CrossRef]
- Luo, D.P.; Zhu, B.T.; Li, X. Fluorescent Effect of Ultra Violet and It’s Application in Detection of Foreign Fibers in Cotton. J. Henan Univ. Sci. Technol. Nat. Sci. 2007, 2007, 63–66+2. [Google Scholar]
- Cai, X.X.; Wu, L.L.; Liang, H.F.; Chen, J. Cotton foreign fiber detection based on near-infrared imaging technology. Cotton Text. Technol. 2021, 49, 6–10. [Google Scholar]
- Hua, C.J.; Su, Z.W.; Qiao, L.; Shi, J. White foreign fibers detection in cotton using line laser. Trans. Chin. Soc. Agric. Mach. 2012, 43, 181–185. [Google Scholar]
- Mustafic, A.; Jiang, Y.; Li, C.Y. Cotton contamination detection and classification using hyperspectral fluorescence imaging. Text. Res. J. 2016, 86, 1574–1584. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, S.L.; Shi, W.X.; Zeng, L.; Deng, D.X. Design and test of foreign fiber removal machine based on embedded system. Trans. Chin. Soc. Agric. Mach. 2017, 48, 43–52. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Goodman, E.D. Introduction to genetic algorithms. In Proceedings of the Fourteenth International Conference on Genetic and Evolutionary Computation Conference Companion-GECCO Companion’12, Philadelphia, PA, USA, 7–11 July 2012; pp. 671–692. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system:optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. SMC 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Liu, S.X.; Wang, J.X.; Zhang, H.; Li, W.; Li, D.L.; Zhang, X.H.; Fan, G.Q. Research on the multi-channel wavelet segmentation method of faint cotton foreign fibers. Chin. J. Sci. Instrum. 2016, 37, 60–66. [Google Scholar]
- He, Y.; Wang, J.F. Rapid nondestructive identification of wood lacquer using Raman spectroscopy based on characteristic-band-Fisher-K nearest neighbor. Laser Optoelectron. Prog. 2020, 57, 013001. [Google Scholar] [CrossRef]
- Jain, A.K.; Dubes, R.C. Algorithms for Clustering Data. Technometrics 1988, 32, 227–229. [Google Scholar]
- Vapnik, V. Statistical Learning Theory. DBLP 1998. [Google Scholar] [CrossRef]
- He, X.Y.; Su, Z.W.; Deng, B.Y.; Pan, Y.F.; Chi, Z.Q. An artificial intelligence method for detecting foreign fiber in seed cotton. Cotton Text. Technol. 2018, 46, 49–52. [Google Scholar]
- He, X.Y.; Wei, P.; Zhang, L.; Deng, B.Y.; Pan, Y.F.; Su, Z.W. Detection method of foreign fibers in seed cotton based on deep-learning. J. Text. Res. 2018, 39, 131–135. [Google Scholar]
- Zhang, D. Research on Seed Cotton Foreign Fiber Sorting Recognition Algorithm Based on Deep Learning. Master’s Thesis, Nanjing Forestry University, Nanjing, China, 2019. [Google Scholar]
- Du, Y.H.; Dong, C.Q.; Zhao, D.; Ren, W.J.; Cai, W.C. Application of improved Faster RCNN model for foreign fiber identification in cotton. Laser Optoelectron. Prog. 2020, 57, 121007. [Google Scholar]
- Dong, C.Q. Research on foreign fiber classification method based on improved Faster R-CNN model. Master’s Thesis, Tianjin Polytechnic University, Tianjin, China, 2020. [Google Scholar]
- Wu, M.X.; Wu, J.; Zhang, C.; Zhu, L. Detection of foreign fiber in cotton based on improved YOLOv3. Chin. J. Liq. Cryst. Disp. 2020, 35, 1195–1203. [Google Scholar] [CrossRef]
- Wei, W.; Deng, D.X.; Zeng, L. Classification of foreign fibers using deep learning and its implementation on embedded system. Int. J. Adv. Robot. Syst. 2019, 7, 1729881419867600. [Google Scholar] [CrossRef]
- Wu, Z.W.; Shi, H.Y. Recognition of Foreign Fiber in Cotton Based on DSConv and CBAM. Cotton Text. Technol. 2022, 50, 19–23. [Google Scholar]
- Zhang, Y.; Zhang, S.J.; Feng, Z.Q. Improved Faster RCNN Target Detection Method for Foreign Fiber in Cotton. Cotton Text. Technol. 2022, 5, 37–41. [Google Scholar]
- Zhang, C.; Li, T.; Li, J. Detection of Impurity Rate of Machine-Picked Cotton Based on Improved Canny Operator. Electronics 2022, 11, 974. [Google Scholar] [CrossRef]
- Abayomi-Alli, O.O.; Damaševičius, R.; Misra, S.; Maskeliūnas, R. Cassava disease recognition from low-quality images using enhanced data augmentation model and deep learning. Expert Syst. 2021, 38, e12746. [Google Scholar] [CrossRef]
- Ye, Y.; Li, Y.; Ouyang, R.; Zhang, Z.; Tang, Y.; Bai, S. Improving machine learning based phase and hardness prediction of high-entropy alloys by using Gaussian noise augmented data. Comput. Mater. Sci. 2023, 223, 112140. [Google Scholar] [CrossRef]
- Zheng, Z.H.; Wang, P.; Liu, W.; Li, J.Z.; Ye, R.G.; Ren, D.W. Distance-IoU loss: Faster and better learning for bounding box regression. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 12993–13000. [Google Scholar]
- Zhao, W.; Wu, D.; Zheng, X. Detection of Chrysanthemums Inflorescence Based on Improved CR-YOLOv5s Algorithm. Sensors 2023, 23, 4234. [Google Scholar] [CrossRef]
- Ma, N.; Zhang, X.; Zheng, H.T.; Sun, J. Shufflenet v2: Practical Guidelines for Efficient CNN Architecture Design. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 116–131. [Google Scholar]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate attention for efficient mobile network design. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 19–25 June 2021; pp. 13713–13722. [Google Scholar]
- Yu, J.; Zhang, W. Face Mask Wearing Detection Algorithm Based on Improved YOLO-v4. Sensors 2021, 21, 3263. [Google Scholar] [CrossRef] [PubMed]
- Qiao, Y.L.; Guo, Y.Y.; He, D.J. Cattle body detection based on YOLOv5-ASFF for precision livestock farming. Comput. Electron. Agric. 2023, 204, 107579. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Angle of Incidence | |||
|---|---|---|---|---|
| 45° | 60° | 75° | 90° | |
| M(X) | 85.0056 | 87.1309 | 79.0224 | 96.0166 |
| Var(x, y) | 5866.0319 | 5287.1670 | 4263.1522 | 2042.0076 |
| Categories | Number of Targets | ||
|---|---|---|---|
| Training Set | Validation Set | Testing Set | |
| Polypropylene | 967 | 112 | 121 |
| Cloth | 966 | 132 | 126 |
| Mulch film | 551 | 56 | 59 |
| Sponge | 954 | 109 | 137 |
| Chemical fiber | 976 | 111 | 113 |
| Stem | 994 | 108 | 98 |
| Dead leaves | 1002 | 102 | 114 |
| PVC | 1005 | 88 | 113 |
| Hair | 499 | 59 | 72 |
| Hemp rope | 1025 | 91 | 120 |
| Cotton seed | 989 | 108 | 121 |
| Kraft paper | 429 | 54 | 51 |
| Foam | 972 | 113 | 139 |
| Yarn | 108 | 11 | 16 |
| Stone | 974 | 109 | 117 |
| Bark | 991 | 101 | 108 |
| Leaf | 968 | 105 | 127 |
| Polyethylene | 985 | 115 | 136 |
| Feather | 987 | 120 | 117 |
| Paper | 975 | 121 | 134 |
| Total | 17,317 | 1925 | 2139 |
| Hardware and Software | Configuration Parameter |
|---|---|
| Computer | Operating System: Windows10 |
| CPU: Intel(R) Core (TM) i9-9900K [email protected] | |
| GPU: NVIDIA GeForce RTX 3090 | |
| RAM: 16 GB | |
| Video memory: 24 GB | |
| Software version | Python3.9.12 + PyTorch1.9.1 + CUDA11.7 + cuDNN8.2.1 + Opencv4.5.5 +Visual Studio Code2022 (1.69.1) |
| Parameter | Value |
|---|---|
| Batch size | 64 |
| Learning rate | 0.01 |
| Warm-up epochs | 3 |
| Number of iterations | 120 |
| Momentum parameter | 0.937 |
| Image size | 640 × 640 |
| Optimizer | SGD |
| ShuffleNet V2 | PANet | CA | H-Swish | Model Volume (MB) | [email protected] (%) | [email protected]:0.95 (%) | FPS (f/s) |
|---|---|---|---|---|---|---|---|
| × | × | × | × | 13.82 | 95.87 | 52.77 | 170 |
| √ | × | × | × | 7.93 | 93.92 | 50.04 | 370 |
| × | √ | × | × | 10.52 | 96.14 | 57.40 | 323 |
| × | × | √ | × | 13.90 | 95.98 | 55.08 | 180 |
| √ | √ | √ | √ | 0.75 | 96.90 | 59.90 | 385 |
| Model | Parameters | Model Volume (MB) | [email protected] (%) | [email protected]:0.95 (%) | FPS (f/s) |
|---|---|---|---|---|---|
| YOLOv5-CFD | 2.97 × 105 | 0.75 | 96.90 | 59.90 | 385 |
| YOLOv5 | 7.28 × 106 | 13.82 | 95.87 | 52.77 | 170 |
| YOLOv4 | 6.39 × 107 | 244.78 | 93.59 | 50.50 | 88 |
| SSD | 2.41 × 107 | 100.29 | 83.07 | 39.06 | 128 |
| Faster-RCNN | 2.84 × 107 | 108.91 | 75.68 | 33.60 | 9 |
| Different Conditions | Identification | Classification | ||||
|---|---|---|---|---|---|---|
| Misrecognition Rate | Misjudgment Rate | Precision | Recall | F1 | ||
| Illumination | dark | 0 | 0 | 90.07% | 97.03% | 0.93 |
| lamplight | 0 | 0 | 84.42% | 92.35% | 0.88 | |
| sunlight | 7.30% | 0 | 72.20% | 87.72% | 0.79 | |
| Incidence angle | 15° | 100% | 13.64% | 0 | 0 | 0 |
| 45° | 0 | 0 | 90.07% | 97.03% | 0.93 | |
| 90° | 3.93% | 22.07% | 67.85% | 76.20% | 0.72 | |
| Different varieties samples | 115,549 | 0 | 5.54% | 73.66% | 66.23% | 0.69 |
| 114,835 | 0 | 7.92% | 75.39% | 70.03% | 0.73 | |
| 114,712 | 12.87% | 0 | 68.55% | 60.34% | 0.64 | |
| Different positions | upper edge | 0 | 0 | 90.07% | 97.03% | 0.93 |
| middle | 0 | 0 | 90.07% | 97.03% | 0.93 | |
| lower edge | 0 | 0 | 90.07% | 97.03% | 0.93 | |
| Foreign fiber size | 1.5 mm2 | 0 | 0 | 70.79% | 77.05% | 0.74 |
| 1 mm2 | 0 | 0 | 66.54% | 78.21% | 0.72 | |
| 0.5 mm2 | 16.05% | 0 | 60.10% | 71.78% | 0.65 | |
| <0.5 mm2 | 100% | 0 | 0 | 0 | 0 | |
| Environment | smog | 0 | 0 | 90.07% | 97.03% | 0.93 |
| dust | 0 | 0 | 90.07% | 97.03% | 0.93 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Zhang, Z.-F.; Yang, B.; Xi, H.-Q.; Zhai, Y.-S.; Zhang, R.-L.; Geng, L.-J.; Chen, Z.-Y.; Yang, K. Detection and Classification of Cotton Foreign Fibers Based on Polarization Imaging and Improved YOLOv5. Sensors 2023, 23, 4415. https://doi.org/10.3390/s23094415
Wang R, Zhang Z-F, Yang B, Xi H-Q, Zhai Y-S, Zhang R-L, Geng L-J, Chen Z-Y, Yang K. Detection and Classification of Cotton Foreign Fibers Based on Polarization Imaging and Improved YOLOv5. Sensors. 2023; 23(9):4415. https://doi.org/10.3390/s23094415
Chicago/Turabian StyleWang, Rui, Zhi-Feng Zhang, Ben Yang, Hai-Qi Xi, Yu-Sheng Zhai, Rui-Liang Zhang, Li-Jie Geng, Zhi-Yong Chen, and Kun Yang. 2023. "Detection and Classification of Cotton Foreign Fibers Based on Polarization Imaging and Improved YOLOv5" Sensors 23, no. 9: 4415. https://doi.org/10.3390/s23094415