
A Magnetic Levitation System for Range/Sensitivity-Tunable Measurement of Density
by
 and
and
Junhui Yu
1,
Donghai Li
1,
Chengxian Zhu
1,
Qiran Ouyang
1,
Chunyang Miao
1,* and
Haidong Yu
1,2,* 1
Key Laboratory of Flexible Electronics (KLOFE), School of Flexible Electronics (Future Technologies) & Institute of Advanced Materials (IAM), Nanjing Tech University (NanjingTech), 30 South Puzhu Road, Nanjing 211816, China
2
Xi’an Institute of Flexible Electronics, Northwestern Polytechnical University, 127 West Youyi Road, Xi’an 710072, China
*
Authors to whom correspondence should be addressed.
Sensors 2023, 23(8), 3955; https://doi.org/10.3390/s23083955
Submission received: 21 March 2023
/
Revised: 11 April 2023
/
Accepted: 12 April 2023
/
Published: 13 April 2023
(This article belongs to the Special Issue Recent Advances in Magnetic Sensors: Materials, Design and Applications)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Magnetic levitation (MagLev) is a promising density-based analytical technique with numerous applications. Several MagLev structures with different levels of sensitivity and range have been studied. However, these MagLev structures can seldom satisfy the different performance requirements simultaneously, such as high sensitivity, wide measurement range, and easy operation, which have prevented them from being widely used. In this work, a tunable MagLev system was developed. It is confirmed by numerical simulation and experiments that this system possesses a high resolution down to 10−7 g/cm3 or even higher compared to the existing systems. Meanwhile, the resolution and range of this tunable system can be adjusted to meet different requirements of measurement. More importantly, this system can be operated simply and conveniently. This bundle of characteristics demonstrates that the novel tunable MagLev system could be handily applied in various density-based analyses on demand, which would greatly expand the ability of MagLev technology.
1. Introduction
Density is a fundamental property of materials that is critical in various physical and chemical processes. Its significance in applications such as separation [1,2,3], chemical reactions [4,5,6], quality control [7,8], and blood tests [9] has made it an essential topic of interest in materials science and engineering [10,11,12,13,14,15]. Despite the several techniques proposed to determine material density, they suffer from significant drawbacks. Certain well-known density measurement methods, such as hydrometers, density-gradient columns, pycnometers, oscillating-tube densitometers, suspended microchannel resonators, and hydrostatic weighing balances, require large sample volumes and have limited precision, making them incompatible with certain sample types such as gels, pastes, and gums [16,17,18,19,20,21,22]. Additionally, the required equipment for some of these techniques is bulky, expensive, and challenging to use in certain environments. Therefore, the need for a portable, convenient, low-cost, and accurate density measurement method that can be used in resource-limited environments or field settings is still apparent.
One emerging technology that has attracted significant attention for its potential to address these challenges is magnetic levitation (MagLev) [7,9,23,24,25,26,27,28,29,30,31,32,33]. MagLev is a density-based analytical technique that uses magnetic fields to levitate objects, allowing their density to be determined from their position in the field. It has several advantages over traditional methods, including portability, low cost, simple operation, and precise measurements through visual readout [8,13,14,15,33,34,35,36]. MagLev has already found numerous applications in fields such as separation, self-assembly, forensics, quality control, and bioanalysis, and its simplicity makes it particularly suitable for use in resource-limited environments or as a point-of-care diagnostic tool [22,37,38,39,40,41,42,43,44].
For the original MagLev method, an upright cylindrical container filled with a paramagnetic medium (e.g., an aqueous solution of manganese chloride, MnCl2) is used as a density indicator after loading the test samples. Two indistinguishable NdFeB magnets are separately placed on the top and bottom of the container (the like poles facing each other) [27]. With this vertically aligned configuration, the sample’s density can be measured in a relatively wide range (0.8–3 g/cm3) with a density resolution in the order of 10−2 to 10−4 g/cm3 per 1 mm for a given concentration of the paramagnetic medium. Subsequently, it is found that by tilting the vertically aligned MagLev structure, the resolution gradually increases with the increase of the tilt angle [29]. At the same time, with the support of the container wall, the maximum measurable sample density of this tilted MagLev could reach 23 g/cm3. For the limit case, the MagLev system can be tilted to a horizontally aligned configuration, which has the highest resolution down to the order of 10−6 g/cm3 [29]. Nevertheless, the measurable range is only in the order of 10−4 to 10−5 g/cm3 since the supporting force from the container wall can no longer affect the measurement process. This tilted configuration greatly improves the measurement ability of MagLev but also brings great difficulty in operation. Besides this, the ring magnets were also used to construct the axial aligned MagLev structure, which is more convenient for adding samples and paramagnetic medium to the container [31,32]. However, the density resolution of this axial MagLev structure is only in the order of 10−2 to 10−4 g/cm3, and the range is about 0–4 g/cm3. Although different kinds of MagLev systems can be applied in different situations, a high-resolution MagLev that can be operated conveniently according to the diverse requirements is more expected in practical applications.
Here, we designed a tunable high-resolution MagLev system using multiple detachable magnets to meet the diverse requirements. This system enables the measurements to be adjustable by changing the number of magnets, whose resolution can be set from 10−5 to 10−7 g/cm3, and the range can be changed from 10−3 to 10−5 g/cm3. At the same time, this system also takes advantage of axial MagLev, which can be operated simply and conveniently. These properties endow the multi-magnet MagLev (M-MagLev) system with great potential to be applied in various density-based analyses on demand.
2. Materials and Methods
2.1. Design of M-MagLev System
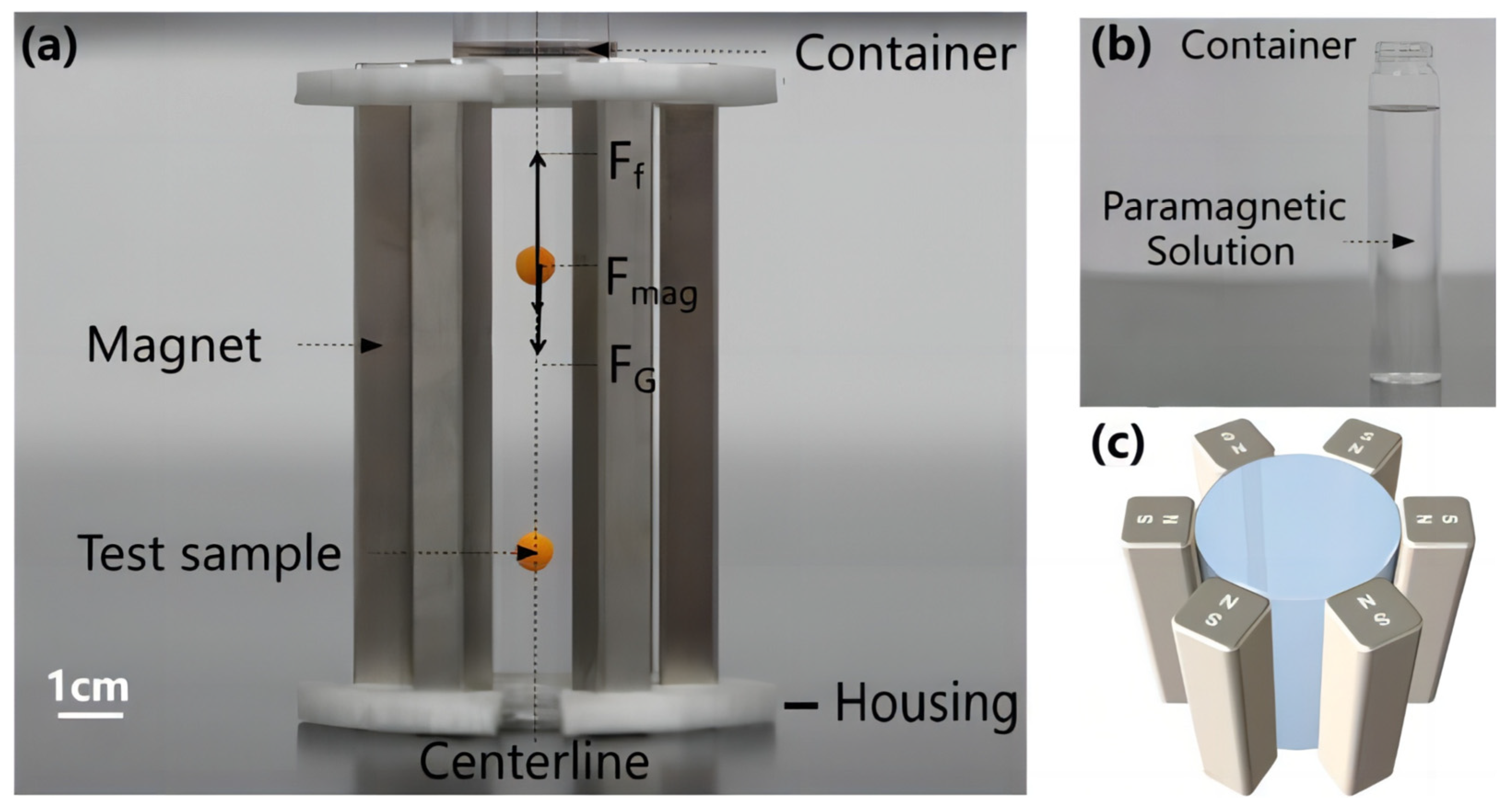
The M-MagLev system is designed based on the horizontally aligned MagLev structure to take advantage of high-resolution and straightforward operation. Here, an upright cylindrical container and several indistinguishable magnets make up the tunable system. As shown in Figure 1a,b, the paramagnetic medium and test samples can be conveniently added to the nonmagnetic container from the top opening. The detachable magnets surround the container symmetrically and are fixed by the magnet housing against the interaction between the magnets since the like-poles of the magnets face each other.
2.2. Theoretical Method
The samples levitated in a paramagnetic medium are subjected to the magnetic force Fmag, the downward gravity force FG, and the upward buoyancy force Ff in the vertical direction. The magnetic force, , acting on the sample is given as:
where is the volume of the sample; , the magnetic permeability of vacuum; is the magnetic flux density; represents the gradient operator, i.e., ; and is the magnetic susceptibility difference between the sample and paramagnetic medium. Here, we defined and as the magnetic susceptibility of the levitating sample and medium, respectively, so we have . We set the centerline of the container as the Z-axis in the Cartesian coordinate system. As indicated by our previous work, the direction of the magnetic flux density at the centerline of the container is along the Z-axis, which is the best levitation position for the test samples [29]. According to the equilibrium conditions of force on the sample, we have:
where and , respectively, are buoyancy force and gravity force on the sample; and the density of the sample and medium, respectively; gravitational acceleration; the gradient of magnetic flux density along the centerline. According to the equilibrium equation (Equation (2)), the density of the sample can be expressed as:
Under the effect of surrounding magnets, the magnetic flux density along the centerline of the container will achieve two extremums: and . Therefore, the maximum density and the minimum density that can be measured by the M-MagLev system could be determined as:
Here, the difference between the maximum density and the minimum density is defined as , which is the range of density measurements for the M-MagLev system with a certain number of magnets. After substituting and , we have the expression of as:
For a given concentration paramagnetic solution, the value of remains constant. We introduce another important characteristic parameter, sensitivity (S), for the M-MagLev system to quantitatively indicate the resolution. The sensitivity is defined as the levitation height variation per unit density difference of sample with a unit of mm (g/cm3)−1. The larger S, the higher the resolution. So far, two key parameters to evaluate the performance of M-MagLev have been introduced here: measurement range and sensitivity S. To obtain the best performance, the numerical simulation for the tunable M-MagLev system is first conducted. Here, we use the COMSOL Multiphysics software to carry out numerical simulations and analyses based on theoretical equations.
2.3. Materials
We use the NdFeB bar-magnets (10 mm × 10 mm × 100 mm, strength N35) to structure the M-MagLev system in our validation experiments. They were purchased from Genchang Magnet Material Co., Ltd., Shanghai, China. We use the Gauss meter (HT108, Hengtong magnetoelectric technology Co., Ltd., Shanghai, China) to measure the magnets’ surface magnetic flux density (Bs). The magnet housings of M-MagLev system (the white polymer parts shown in Figure 1a) were fabricated by 3D printing (Shanghai Yinmeng Intelligent Technology Co., Ltd, Shanghai, China) with Nylon.
We used manganese chloride (MnCl2) aqueous solution prepared by MnCl2·4H2O and deionized water for paramagnetic medium. MnCl2·4H2O was purchased from Adamas-Beta Co., Shanghai, China. In some cases, NaCl2 could also be used to fine-tune the density of the solution. Therefore, the paramagnetic solution density could be adjusted according to the practical requirement, which determines the density benchmark of measuring objects.
Polystyrene beads were used as the test samples, which were purchased from Golden Ball Industry Co., Ltd., Ningbo, China. They were all about the same size (about 6 mm in diameter) and weight (about 0.11 g for each bead). We used a U-tube oscillating densitometer (DMA 35, Anton-Paar, Shanghai, China) to measure the density of the paramagnetic medium. Deionized water (18.4 MΩ/cm) used for all experiments was obtained from Milli-Q system (Millipore, Bedford, MA, USA). A digital single-lens reflex camera was used to record the levitation height.
3. Results
3.1. Simulation Results
The M-MagLev system with six NdFeB bar-magnets (10 mm × 10 mm × 100 mm) was chosen first for simulation. Six bar-magnets were arranged around the container, maintaining the same distance from the center of the container, with a radius (R, the distance between the magnets center and container center) of 42 mm. In order to simplify the analysis, we have imposed the restriction that the system exhibits only the simplest form of rotational symmetry, namely a C2 rotation symmetry, which implies that the system remains invariant under a rotation of 180 degrees around the center axis of the container. This assumption reduces the complexity of the problem and allows us to focus on the essential features of the system’s behavior. Furthermore, this symmetry allows the magnetic field distribution in the container to exhibit only one extremum point. Additional discussion on the distribution of the magnets can be found in Section 4. The magnetic flux density distribution of the M-MagLev system with six magnets is presented in Figure 2. To clearly illustrate the distribution of the magnetic flux density at different heights, we extracted three slices of the magnetic flux density distribution along the vertical direction, as shown in Figure 2a. It can be observed that the magnetic flux emanates from all magnets, and as it propagates, the magnetic flux density progressively declines. Inside the container, the magnetic fluxes mutually superimpose. At the central axis position of the container, due to the symmetrical distribution of the surrounding magnets, the in-plane magnetic flux components cancel out, forming a minimum point of magnetic flux density in the container region. Only the axial component along the container remains. Figure 2b shows the axial profile of the magnetic flux density norm in the container, where the red arrows indicate the direction of magnetic flux density. The distribution of magnetic flux density was found to be symmetric about the central axis, providing favorable magnetic field distribution conditions for accurately measuring the density of samples.
According to the distribution of magnetic flux density, the central axis of the container is the most ideal measurement position. The distribution profiles of magnetic flux density along the centerline for a different number of magnets are summarized in Figure 3a. Except for the area hidden by the magnet housing (about 10 mm in thickness), the magnetic flux density along the Z-axis (Bz) between the two housings changed almost linearly with the height of the container. Furthermore, Bz was entirely antisymmetric about the middle point of the centerline where Bz = 0 mT. Therefore, the area between the two housings was set as the density measurement area, and the distance between the two housings was defined as ∆Z. The maximum magnetic flux density (Bmax) locates at the top position of the measurement area. In contrast, the minimum magnetic flux density (Bmin) locates at the bottom position. They have the same size but opposite directions, i.e., . As we can see from Figure 3a, increasing the number of magnets from two to twelve, the gradient of magnetic flux density along the Z-axis () and two extrema increased gradually. The changes of and Bmax with the number of magnets are shown in the inset of Figure 3a. Both presented a linear change with the number of magnets. Accordingly, the measurement range and sensitivity S for the M-MagLev system can be simplified as:
For the M-MagLev system with a different number of magnets, we calculated and summarized the range ∆ρ and sensitivity S with Equations (7) and (8) in Figure 3b. The increase in the number of magnets can greatly extend the measurement range of the M-MagLev, from g/cm3 for two magnets to g/cm3 for twelve magnets. In other words, the measurement range could be adjusted according to the practical needs just by changing the number of magnets in the M-MagLev system. On the other hand, the sensitivity decreases from mm/(g/cm3) to mm/(g/cm3) with the increasing number of magnets. By comparing with the typical horizontal high-resolution MagLev, this tunable system provides not only a higher resolution down to (g/cm3)/mm, but a wider measurement range.
3.2. Experimental Results
To verify the simulation results, we conducted proof-of-concept experiments of the M-MagLev system with a different number of magnets by levitating polystyrene beads in a container filled with MnCl2 aqueous solution (0.300 mol/L MnCl2·4H2O). The density of this paramagnetic medium can be calculated to be 1.0289 g/cm3, which is confirmed by the measurement of the U-tube oscillating densitometer. We selected several polystyrene beads for the test, whose densities were about 1.02 to 1.03 g/cm3, with slight differences in each other. If the bead density was beyond the range of the system, it would float on the top or settle down at the bottom of the container. For the levitated beads, the levitation height indicates the density of the bead: the higher position, the smaller density. As we can see in the left part of Figure 4, only one bead can levitate in the system. For M-MagLev with twelve magnets, this bead levitates near the center of the container. With the decrease in the number of surrounding magnets, the equilibrium position of this bead gradually rises. It indicates that the density of this bead is a little lower than 1.0289 g/cm3. The right part of Figure 4 presents the relationship between the levitation height and bead density with the number of magnets changing from 4 to 10. The lines are the simulation results, while the points are the experimental results. According to the levitation height, we can infer that the density of this bead is about 1.028891 g/cm3. Thus, the theoretical results are well-matched with the experimental results and provide reliable conclusions for the experimental results. Consequently, the tunable M-MagLev system is straightforward to operate and has a reasonably strong resolution to screen various samples, such as cells and drugs.
4. Discussion
4.1. The Linear Distribution of Magnetic Flux Density
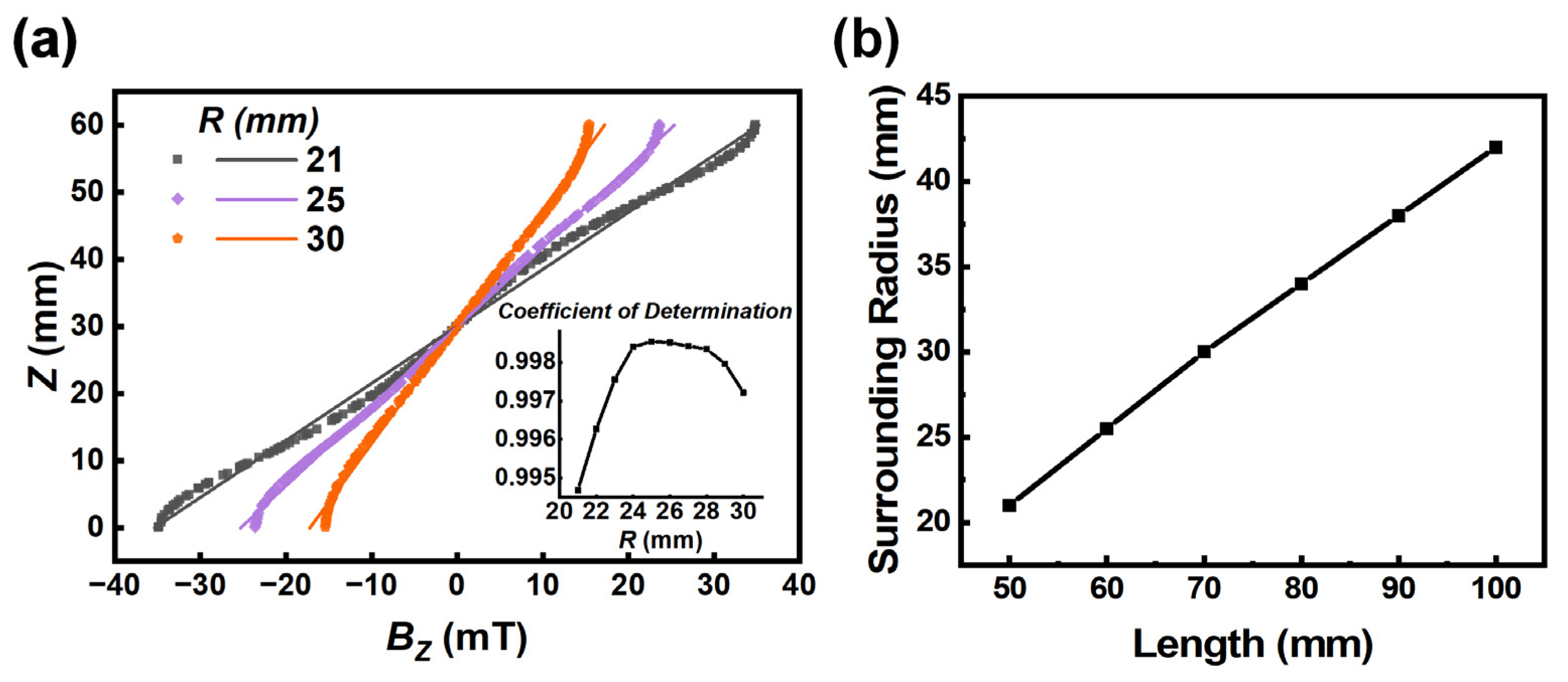
After systematic simulations, we found that the magnet’s length and the surrounding radius of magnets greatly influence the linear distribution of magnetic flux density along the centerline of the container (Bz), which directly affects the accuracy and convenience of operation. Since the number of magnets has little effect on the distribution of Bz (Figure 3a), we use the M-MagLev system with two magnets as an example to illustrate the effects. Firstly, we set the size of the magnet as 10 mm × 10 mm × 60 mm, where the length of the magnet is 60 mm. By numerical simulation, the change of distribution of Bz with the surrounding radius R is plotted in Figure 5a. Naturally, a gradual decline in maximum magnetic flux density Bzmax is presented in this figure as the magnets get farther and farther apart. However, the change of Bz with height Z shows a certain degree of nonlinear distribution for some surrounding radii. Here, we use linear equations to fit these curves. The degree of linearity is evaluated by the coefficient of determination—the closer the value is to 1, the better the linearity of Bz. As the insert in Figure 5a shows, with the increase of surrounding radius R from 21 mm to 30 mm, the coefficient of determination rises rapidly to the maximum value 0.9984 at R = 25 mm and then gradually decreases. That is to say, for the magnet 60 mm in length, a surrounding radius of 25 mm would give the distribution of Bz the best linearity. Subsequently, we summarized the optimal radius for different magnet lengths in Figure 5b. A proportional relationship is presented between the optimized surrounding radius and magnet length. By fitting, it can be found that the linearity of Bz was best when the ratio of surrounding radius to magnet length was about 0.4231. Accordingly, by choosing the appropriate surrounding diameter and length of magnets, better accuracy and convenience could be achieved for the M-MagLev system.
4.2. Measurement Stability
To ensure that the direction of magnetic flux density on the container’s centerline is along the Z-axis, the magnets must be arranged around the container symmetrically. This part will discuss the influence of different symmetries on the M-MagLev system measurement results. Here, we still take the M-MagLev system with six magnets as an example. There are three kinds of axisymmetric distribution for the six magnets: C2, C3, and C6. Here, Cn is the rotational symmetry of order n, which means rotation by an angle of 360°/n does not change the object. By numerical simulations, we found that the symmetry of the magnet’s distribution does not affect the measurement range and resolution of the M-MagLev system but affects the levitation stability of samples. As shown in Figure 6, the distributions of the magnetic flux density at the middle cross-section (XY plane at the midpoint of centerline) for C3 and C6 symmetries present multiple stable points near the centerline (indicated by the red dot circles), which can easily lead to non-univocal results. For comparison, the distribution of magnetic flux density for C2 symmetry shows only one stable point. It lies on the container’s centerline, which is what operators expect for the practical measurement.
The corresponding experiments were also performed to verify the results. As indicated in Figure 7, the C2 symmetrical distribution of magnets makes all the levitated beads lie on the container’s centerline. In contrast, some beads are levitated off the centerline in the case of the C6 symmetrical distribution of magnets. This result is consistent with our numerical simulation and confirms that the C2 symmetrical distribution of magnets is beneficial to improve the measurement stability and accuracy of the M-MagLev system.
5. Conclusions
In summary, a novel tunable high-resolution MagLev system with multiple magnets was developed. By combining theoretical simulation and experiments, the mechanism and performance of this system were well demonstrated and studied. Compared with other MagLev structures, this M-MagLev possesses the highest resolution—down to 1 × 10−7 g/cm3. By changing the number of magnets, the resolution can also be changed from 10−7 to 10−5 g/cm3, and the corresponding measurement range varies from 10−5 to 10−3 g/cm3, which provides excellent convenience for connecting with other density measuring instruments with lower accuracy. With the systematic discussions on the basic parameters of the M-MagLev system, it is found that when the magnet length and surrounding radius reach a proportion of 0.4231, the magnetic flux density on the container’s centerline shows the best linearity with height. Meanwhile, the C2 symmetrical distribution of magnets can significantly improve the levitation stability of samples. These distinguished and adjustable advantages make this tunable high-resolution M-MagLev system suitable for a wide variety of density-based applications on demand.
Author Contributions
Conceptualization, H.Y. and D.L.; methodology, H.Y., C.M. and Q.O.; software, Q.O., J.Y. and C.M.; validation, J.Y., D.L., C.Z. and Q.O.; formal analysis, J.Y., C.Z. and D.L.; resources, H.Y. and D.L.; writing—original draft preparation, J.Y. and Q.O.; writing—review and editing, C.M. and H.Y.; project administration, H.Y. and C.M.; funding acquisition, D.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (21675085, 61704080), Natural Science Foundation of Jiangsu Province (BK20170042, BK20170961), and Major Program of Natural Science Foundation of the Higher Education Institutions of Jiangsu Province, China (No. 19KJA460005).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to internal ownership rules.
Acknowledgments
We would like to express our sincere gratitude to Lehui Ding from Shanghai Haikong Tianma Sensor Technology Ltd. for providing the necessary equipment and materials for the experiments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Aasland, S.; McMillan, P.F. Density-driven liquid–liquid phase separation in the system AI2O3–Y2O3. Nature 1994, 369, 633–636. [Google Scholar] [CrossRef]
- Atkinson, M.B.J.; Bwambok, D.K.; Chen, J.; Chopade, P.D.; Thuo, M.M.; Mace, C.R.; Mirica, K.A.; Kumar, A.A.; Myerson, A.S.; Whitesides, G.M. Using Magnetic Levitation to Separate Mixtures of Crystal Polymorphs. Angew. Chem. Int. Ed. 2013, 52, 10208–10211. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Wong, S.Y.; Bwambok, D.K.; Atkinson, M.B.J.; Zhang, X.; Whitesides, G.M.; Myerson, A.S. Separation and enrichment of enantiopure from racemic compounds using magnetic levitation. Chem. Commun. 2014, 50, 7548–7551. [Google Scholar] [CrossRef] [Green Version]
- Hurley, A.C.; Lennard-Jones, J.E. The electrostatic calculation of molecular energies—I. Methods of calculating molecular energies. Proc. R. Soc. London. Ser. A. Math. Phys. Sci. 1997, 226, 170–178. [Google Scholar]
- Kontturi, E.; Lankinen, A. Following the Kinetics of a Chemical Reaction in Ultrathin Supported Polymer Films by Reliable Mass Density Determination with X-ray Reflectivity. J. Am. Chem. Soc. 2010, 132, 3678–3679. [Google Scholar] [CrossRef]
- Klumpp, S.; Lefèvre, C.T.; Bennet, M.; Faivre, D. Swimming with magnets: From biological organisms to synthetic devices. Phys. Rep. 2019, 789, 1–54. [Google Scholar] [CrossRef]
- Ashkarran, A.A.; Mahmoudi, M. Magnetic levitation: A physical tool to measure the density of unknown diamagnetic materials. Phys. Educ. 2021, 56, 055020. [Google Scholar] [CrossRef]
- Hennek, J.W.; Nemiroski, A.; Subramaniam, A.B.; Bwambok, D.K.; Yang, D.; Harburg, D.V.; Tricard, S.; Ellerbee, A.K.; Whitesides, G.M. Using Magnetic Levitation for Non-Destructive Quality Control of Plastic Parts. Adv. Mater. 2015, 27, 1587–1592. [Google Scholar] [CrossRef]
- Ashkarran, A.A.; Mahmoudi, M. Magnetic Levitation Systems for Disease Diagnostics. Trends Biotechnol. 2021, 39, 311–321. [Google Scholar] [CrossRef]
- De Chiffre, L.; Carmignato, S.; Kruth, J.P.; Schmitt, R.; Weckenmann, A. Industrial applications of computed tomography. CIRP Ann. 2014, 63, 655–677. [Google Scholar] [CrossRef]
- Yoo, J.; Tang, S.; Gao, W. Micro- and nanorobots for biomedical applications in the brain. Nat. Rev. Bioeng. 2023. [Google Scholar] [CrossRef]
- von Muhlen, M.G.; Brault, N.D.; Knudsen, S.M.; Jiang, S.; Manalis, S.R. Label-Free Biomarker Sensing in Undiluted Serum with Suspended Microchannel Resonators. Anal. Chem. 2010, 82, 1905–1910. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lockett, M.R.; Mirica, K.A.; Mace, C.R.; Blackledge, R.D.; Whitesides, G.M. Analyzing Forensic Evidence Based on Density with Magnetic Levitation. J. Forensic Sci. 2013, 58, 40–45. [Google Scholar] [CrossRef] [PubMed]
- Shapiro, N.D.; Mirica, K.A.; Soh, S.; Phillips, S.T.; Taran, O.; Mace, C.R.; Shevkoplyas, S.S.; Whitesides, G.M. Measuring Binding of Protein to Gel-Bound Ligands Using Magnetic Levitation. J. Am. Chem. Soc. 2012, 134, 5637–5646. [Google Scholar] [CrossRef] [Green Version]
- Tasoglu, S.; Khoory, J.A.; Tekin, H.C.; Thomas, C.; Karnoub, A.E.; Ghiran, I.C.; Demirci, U. Levitational Image Cytometry with Temporal Resolution. Adv. Mater. 2015, 27, 3901–3908. [Google Scholar] [CrossRef]
- Wolfrum, E.J.; Nagle, N.J.; Ness, R.M.; Peterson, D.J.; Ray, A.E.; Stevens, D.M. The Effect of Biomass Densification on Structural Sugar Release and Yield in Biofuel Feedstock and Feedstock Blends. BioEnergy Res. 2017, 10, 478–487. [Google Scholar] [CrossRef] [Green Version]
- Ashcroft, S.J.; Booker, D.R.; Turner, J.C.R. Density measurement by oscillating tube. Effects of viscosity, temperature, calibration and signal processing. J. Chem. Soc. Faraday Trans. 1990, 86, 145–149. [Google Scholar] [CrossRef]
- Burg, T.P.; Godin, M.; Knudsen, S.M.; Shen, W.; Carlson, G.; Foster, J.S.; Babcock, K.; Manalis, S.R. Weighing of biomolecules, single cells and single nanoparticles in fluid. Nature 2007, 446, 1066–1069. [Google Scholar] [CrossRef] [Green Version]
- Rabier, F.; Temmerman, M.; Böhm, T.; Hartmann, H.; Daugbjerg Jensen, P.; Rathbauer, J.; Carrasco, J.; Fernández, M. Particle density determination of pellets and briquettes. Biomass Bioenergy 2006, 30, 954–963. [Google Scholar] [CrossRef]
- Burg, T.P.; Manalis, S.R. Suspended microchannel resonators for biomolecular detection. Appl. Phys. Lett. 2003, 83, 2698–2700. [Google Scholar] [CrossRef] [Green Version]
- Dreisbach, F.; Lösch, H.W. Magnetic Suspension Balance For Simultaneous Measurement of a Sample and the Density of the Measuring Fluid. J. Therm. Anal. Calorim. 2000, 62, 515–521. [Google Scholar] [CrossRef]
- Doan-Nguyen, T.P.; Crespy, D. Advanced density-based methods for the characterization of materials, binding events, and kinetics. Chem. Soc. Rev. 2022, 51, 8612–8651. [Google Scholar] [CrossRef] [PubMed]
- Nemiroski, A.; Soh, S.; Kwok, S.W.; Yu, H.-D.; Whitesides, G.M. Tilted Magnetic Levitation Enables Measurement of the Complete Range of Densities of Materials with Low Magnetic Permeability. J. Am. Chem. Soc. 2016, 138, 1252–1257. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abrahamsson, C.K.; Ge, S.; Bell, J.G.; Blackledge, R.D.; Whitesides, G.M. Density Determination and Separation via Magnetic Levitation. In Leading Edge Techniques in Forensic Trace Evidence Analysis; Blackledge, R.D., Ed.; Wiley: Honoken, NJ, USA, 2022; pp. 103–147. [Google Scholar]
- Ge, S.; Nemiroski, A.; Mirica, K.A.; Mace, C.R.; Hennek, J.W.; Kumar, A.A.; Whitesides, G.M. Magnetic Levitation in Chemistry, Materials Science, and Biochemistry. Angew. Chem. Int. Ed. 2020, 59, 17810–17855. [Google Scholar] [CrossRef]
- Moon, F.C. Introduction to Magnetic Levitation. In Superconducting Levitation; Moon, F.C., Ed.; Wiley-VCH: Mörlenbach, Germany, 1995; pp. 1–31. [Google Scholar]
- Mirica, K.A.; Shevkoplyas, S.S.; Phillips, S.T.; Gupta, M.; Whitesides, G.M. Measuring Densities of Solids and Liquids Using Magnetic Levitation: Fundamentals. J. Am. Chem. Soc. 2009, 131, 10049–10058. [Google Scholar] [CrossRef] [PubMed]
- Mirica, K.A.; Phillips, S.T.; Shevkoplyas, S.S.; Whitesides, G.M. Using Magnetic Levitation To Distinguish Atomic-Level Differences in Chemical Composition of Polymers, and To Monitor Chemical Reactions on Solid Supports. J. Am. Chem. Soc. 2008, 130, 17678–17680. [Google Scholar] [CrossRef]
- Nemiroski, A.; Kumar, A.A.; Soh, S.; Harburg, D.V.; Yu, H.-D.; Whitesides, G.M. High-Sensitivity Measurement of Density by Magnetic Levitation. Anal. Chem. 2016, 88, 2666–2674. [Google Scholar] [CrossRef] [Green Version]
- Digiacomo, L.; Quagliarini, E.; Marmiroli, B.; Sartori, B.; Perini, G.; Papi, M.; Capriotti, A.L.; Montone, C.M.; Cerrato, A.; Caracciolo, G.; et al. Magnetic Levitation Patterns of Microfluidic-Generated Nanoparticle–Protein Complexes. Nanomaterials 2022, 12, 2376. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, P.; Gu, F.; Xie, J.; Xia, N.; He, Y.; Fu, J. Single-Ring Magnetic Levitation Configuration for Object Manipulation and Density-Based Measurement. Anal. Chem. 2018, 90, 9226–9233. [Google Scholar] [CrossRef] [Green Version]
- Ge, S.; Whitesides, G.M. “Axial” Magnetic Levitation Using Ring Magnets Enables Simple Density-Based Analysis, Separation, and Manipulation. Anal. Chem. 2018, 90, 12239–12245. [Google Scholar] [CrossRef]
- Winkleman, A.; Perez-Castillejos, R.; Gudiksen, K.L.; Phillips, S.T.; Prentiss, M.; Whitesides, G.M. Density-Based Diamagnetic Separation: Devices for Detecting Binding Events and for Collecting Unlabeled Diamagnetic Particles in Paramagnetic Solutions. Anal. Chem. 2007, 79, 6542–6550. [Google Scholar] [CrossRef] [PubMed]
- Mirica, K.A.; Ilievski, F.; Ellerbee, A.K.; Shevkoplyas, S.S.; Whitesides, G.M. Using Magnetic Levitation for Three Dimensional Self-Assembly. Adv. Mater. 2011, 23, 4134–4140. [Google Scholar] [CrossRef] [PubMed]
- Tasoglu, S.; Yu, C.H.; Liaudanskaya, V.; Guven, S.; Migliaresi, C.; Demirci, U. Magnetic Levitational Assembly for Living Material Fabrication. Adv. Healthc. Mater. 2015, 4, 1469–1476. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Li, M.; Yang, Q.; Li, Y.; Liu, H.; Yang, H.; Xu, F. Magnetically Actuated Droplet Manipulation and Its Potential Biomedical Applications. ACS Appl. Mater. Interfaces 2017, 9, 1155–1166. [Google Scholar] [CrossRef] [PubMed]
- Gao, Q.-H.; Wen, B.; Kang, Y.; Zhang, W.-M. Pump-free microfluidic magnetic levitation approach for density-based cell characterization. Biosens. Bioelectron. 2022, 204, 114052. [Google Scholar] [CrossRef] [PubMed]
- Dabbagh, S.R.; Alseed, M.M.; Saadat, M.; Sitti, M.; Tasoglu, S. Biomedical Applications of Magnetic Levitation. Adv. NanoBiomed Res. 2022, 2, 2100103. [Google Scholar] [CrossRef]
- Quagliarini, E.; Caputo, D.; Cammarata, R.; Caracciolo, G.; Pozzi, D. Coupling magnetic levitation of graphene oxide–protein complexes with blood levels of glucose for early detection of pancreatic adenocarcinoma. Cancer Nanotechnol. 2023, 14, 16. [Google Scholar] [CrossRef]
- Quagliarini, E.; Digiacomo, L.; Caputo, D.; Coppola, A.; Amenitsch, H.; Caracciolo, G.; Pozzi, D. Magnetic Levitation of Personalized Nanoparticle–Protein Corona as an Effective Tool for Cancer Detection. Nanomaterials 2022, 12, 1397. [Google Scholar] [CrossRef]
- Sözmen, A.B.; Arslan-Yıldız, A. Sensitive and rapid protein assay via magnetic levitation. Biosens. Bioelectron. X 2022, 10, 100137. [Google Scholar] [CrossRef]
- Goreke, U.; Bode, A.; Yaman, S.; Gurkan, U.A.; Durmus, N.G. Size and density measurements of single sickle red blood cells using microfluidic magnetic levitation. Lab A Chip 2022, 22, 683–696. [Google Scholar] [CrossRef]
- Ren, X.; Breadmore, M.C.; Maya, F. Biphasic Magnetic Levitation to Detect Organic Pollutants on Microplastics. Anal. Chem. 2022, 94, 9033–9039. [Google Scholar] [CrossRef] [PubMed]
- Ren, X.; Breadmore, M.C.; Maya, F. Magnetism-Assisted Density Gradient Separation of Microplastics. Anal. Chem. 2022, 94, 17947–17955. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Overview of M-MagLev system. Photographs of (a) an M-MagLev system with 6 magnets and (b) the container in the M-MagLev system. (c) The corresponding simulation model of the M-MagLev system.
Figure 1.
Overview of M-MagLev system. Photographs of (a) an M-MagLev system with 6 magnets and (b) the container in the M-MagLev system. (c) The corresponding simulation model of the M-MagLev system.

Figure 2.
Simulation of the M-MagLev system with six magnets. (a) Contour plots of magnetic flux density distribution in horizontal slices of system. (b) Contour plots of magnetic flux density distribution in axis section of system. The red arrows indicate the direction of magnetic flux density.
Figure 2.
Simulation of the M-MagLev system with six magnets. (a) Contour plots of magnetic flux density distribution in horizontal slices of system. (b) Contour plots of magnetic flux density distribution in axis section of system. The red arrows indicate the direction of magnetic flux density.

Figure 3.
(a) Magnetic flux density profile along the centerline for the different numbers of magnets. The two gray areas at the top and bottom represent the parts blocked by the magnet housing. The inset presents the changes of Bmax and with the number of magnets. (b) Changes of range and sensitivity with the different numbers of magnets of the M-MagLev system.
Figure 3.
(a) Magnetic flux density profile along the centerline for the different numbers of magnets. The two gray areas at the top and bottom represent the parts blocked by the magnet housing. The inset presents the changes of Bmax and with the number of magnets. (b) Changes of range and sensitivity with the different numbers of magnets of the M-MagLev system.

Figure 4.
Density measurements using the M-MagLev system. Left part is captured photographs of the polystyrene bead levitated in M-MagLev with 4, 6, 8, and 10 magnets, respectively. Right part is the mapping of levitation height and the density of the bead for the corresponding M-MagLev according to the theoretical model. Symbols are the experimental results, while lines are the simulation results.
Figure 4.
Density measurements using the M-MagLev system. Left part is captured photographs of the polystyrene bead levitated in M-MagLev with 4, 6, 8, and 10 magnets, respectively. Right part is the mapping of levitation height and the density of the bead for the corresponding M-MagLev according to the theoretical model. Symbols are the experimental results, while lines are the simulation results.

Figure 5.
(a) Magnetic flux density profile along the centerline for different surrounding radii R. Points are the simulation results, and the corresponding lines were obtained by linear fitting. The coefficients of determination for the linear fitting are listed in the insert. (b) Relationship between the optimized surrounding radius and magnet length.
Figure 5.
(a) Magnetic flux density profile along the centerline for different surrounding radii R. Points are the simulation results, and the corresponding lines were obtained by linear fitting. The coefficients of determination for the linear fitting are listed in the insert. (b) Relationship between the optimized surrounding radius and magnet length.

Figure 6.
Magnetic flux density distribution in middle cross-section (x-y plane) of 6-magnet M-MagLev system with C2-symmetry (a), C3-symmetry (b), and C6-symmetry (c). The red dotted circles in (b,c) indicate the multiple stable positions.
Figure 6.
Magnetic flux density distribution in middle cross-section (x-y plane) of 6-magnet M-MagLev system with C2-symmetry (a), C3-symmetry (b), and C6-symmetry (c). The red dotted circles in (b,c) indicate the multiple stable positions.

Figure 7.
Captured photographs of polystyrene beads levitated in 6-magnet M-MagLev system with (a) C6-symmetry distribution of magnets and (b) C2-symmetry distribution of magnets. The insets are the distribution diagram of six magnets. The red dashed lines represent the different positions of the same ball under different magnetic distributions.
Figure 7.
Captured photographs of polystyrene beads levitated in 6-magnet M-MagLev system with (a) C6-symmetry distribution of magnets and (b) C2-symmetry distribution of magnets. The insets are the distribution diagram of six magnets. The red dashed lines represent the different positions of the same ball under different magnetic distributions.

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yu, J.; Li, D.; Zhu, C.; Ouyang, Q.; Miao, C.; Yu, H. A Magnetic Levitation System for Range/Sensitivity-Tunable Measurement of Density. Sensors 2023, 23, 3955. https://doi.org/10.3390/s23083955
AMA Style
Yu J, Li D, Zhu C, Ouyang Q, Miao C, Yu H. A Magnetic Levitation System for Range/Sensitivity-Tunable Measurement of Density. Sensors. 2023; 23(8):3955. https://doi.org/10.3390/s23083955
Chicago/Turabian StyleYu, Junhui, Donghai Li, Chengxian Zhu, Qiran Ouyang, Chunyang Miao, and Haidong Yu. 2023. "A Magnetic Levitation System for Range/Sensitivity-Tunable Measurement of Density" Sensors 23, no. 8: 3955. https://doi.org/10.3390/s23083955
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.