
Localization and Classification of Venusian Volcanoes Using Image Detection Algorithms





1
Rijeka Development Agency PORIN, Ul. Milutina Barača 62, 51000 Rijeka, Croatia
2
Faculty of Engineering, University of Rijeka, Vukovarska 58, 51000 Rijeka, Croatia
*
Author to whom correspondence should be addressed.
Sensors 2023, 23(3), 1224; https://doi.org/10.3390/s23031224
Submission received: 3 January 2023
/
Revised: 16 January 2023
/
Accepted: 19 January 2023
/
Published: 20 January 2023
(This article belongs to the Section Sensing and Imaging)
Abstract
:Imaging is one of the main tools of modern astronomy—many images are collected each day, and they must be processed. Processing such a large amount of images can be complex, time-consuming, and may require advanced tools. One of the techniques that may be employed is artificial intelligence (AI)-based image detection and classification. In this paper, the research is focused on developing such a system for the problem of the Magellan dataset, which contains 134 satellite images of Venus’s surface with individual volcanoes marked with circular labels. Volcanoes are classified into four classes depending on their features. In this paper, the authors apply the You-Only-Look-Once (YOLO) algorithm, which is based on a convolutional neural network (CNN). To apply this technique, the original labels are first converted into a suitable YOLO format. Then, due to the relatively small number of images in the dataset, deterministic augmentation techniques are applied. Hyperparameters of the YOLO network are tuned to achieve the best results, which are evaluated as mean average precision ([email protected]) for localization accuracy and F1 score for classification accuracy. The experimental results using cross-vallidation indicate that the proposed method achieved 0.835 [email protected] and 0.826 F1 scores, respectively.
1. Introduction
The development of the internet and hardware resources in the last twenty years has facilitated access to a large amount of data. The data generated in recent years is expanding in variety and complexity, and the speed of collection is also increasing. Such exponential growth in the amount of data requires simple, fast, and accurate tools for processing. Artificial intelligence (AI) jumps in as a solution. Computer vision is one of the most attractive research areas today. Scientists in this field have achieved enormous progress in recent years, from the development of an algorithm for driving autonomous vehicles [1], all the way to the detection of cancer using only information from images [2].
In the past, data collection in astronomy was a manual and time-consuming job for humans, but with the advancement of technology and automation, today the amount of data collected by observing the sky is almost unimaginable. Looking back 20 years, efforts such as the Sloan Digital Sky Survey (SDSS) [3], Pan-STARRS [4], and the Large Synatopic Survey Telescope (LSST) [5], have shifted from individualized data collection to studying larger parts of the sky and wider wavelength ranges of light, e.g., collecting data on more events, objects, and larger areas of the sky through larger areas and better light detectors. SDSS is one of the largest astronomical surveys today. Every night the SDSS telescope collects 200 GB of data, while there are telescopes that collect up to 90 terabytes of data every night (Table 1) [6]. Due to the enormous amount of data collected, astronomers struggle with more than 100 to 200 petabytes of data per year, which requires a large storage infrastructure. Therefore, it is crucial to process this large amount of collected data. Such an exponential increase in data provides an ideal opportunity to apply artificial intelligence and machine learning to help process all this data.
The application discussed in this paper focuses on data collected from the Magellan spacecraft, which was launched in 1989 and arrived in the orbit of Venus in 1990. During its four years in orbit around Earth’s sister planet, Magellan recorded 98% of the surface of Venus and collected the gravitational data of the planet itself in high resolution using synthetic aperture radar (SAR) [7]. During Magellan’s active operation, about 30,000 images of the surface of Venus were collected, on which there are also numerous volcanoes, but the manual labeling of these images is time-consuming and so far, only 134 images have been processed by geological experts [8]. It is believed that there are more than 1600 large volcanoes on the surface of Venus whose features are known so far, but their number may be over a hundred thousand or even over a million [8,9]. Understanding the global distribution of the volcanoes is critical to understanding the geologic evolution of the planet. Therefore, collecting relevant information, such as volcanoes size, location, and other relevant information, can provide the data that could answer questions about the geophysics of the planet Venus. The sheer volume of collected planetary data makes automated tools necessary if all of the collected data are to be analyzed. It was precisely for this reason that a tool was created using machine learning algorithms that would serve as an aid in labeling such a large amount of data.
Burl et al. proposed the JARtool System (JPL Adaptive Recognition Tool) [8], which is a trainable visual recognition system developed for this specific problem. JARtool uses a matched filter derived from training examples, then via principal components analysis (PCA) provides a set of domain-specific features. On top of that, supervised machine learning techniques are applied to classify the data into two classes (volcano or non-volcano). For detecting possible volcanic locations, JARtool’s first component is the focus of attention (FOA) algorithm [10], which outputs a discrete list of possible volcanic locations. Later mentioned, the investigation is concluded using a combination of classifiers in which each classifier is trained to detect a different volcano subclass. In their experiments, each label is counted as a volcano regardless of the assigned confidence (volcanoes are classified depending on their confidence score). Experiments were performed on two types of Magellan data products, Homogeneous and Heterogeneous images. Homogeneous images represent images that are relatively similar in appearance (homogeneous) and are mostly from the same area. Heteregoeneus images represent images chosen from random locations, and those images contained a significantly greater variety in appearance. The JARtool system performed relatively well on homogeneous image sets in the 50–64% range of detected volcanoes (one class, regardless of the classification), while performance on heterogeneous image sets was in the 35–40% range.
The scope of this problem is focused on detecting geological features over the SAR imagery, which can be noisy and thus challenging. Due to the nature of SAR images, they are affected by multiplicative noise, which is also known as speckle noise [11]. This kind of noise is one of the main things that affect the overall performance of any classification methodology. Many studies have applied SAR imagery to machine learning-based algorithms, even including deep learning [12]. The first attempts using deep learning methods in SAR imagery were for a variety of tasks, which includes terrain face classification [13], object detection [14], and even disaster detection [15]. This problem requires both detection and classification of the desired object, which requires the usage of more known convolutional neural network (CNN) architectures such as Fast-RCNN [16], You only look Once algorithm, etcetera. After some research, it is concluded that most of the object detection in SAR imagery is focused on detecting human-made objects. For example, there are deep learning methods used for detecting ships, airplanes, and other man-made features in SAR imagery.
In this paper, authors used the You Only Look Once (YOLO) version 5 algorithm [17] as a base for an automatic tool for localizing and classifying Venusian volcanoes. YOLOv5 algorithm is currently one of the fastest and most precise algorithms for object detection and, today, it is used in almost every field. From the many studies concluded in the past years using YOLO on different problems, it demonstrates better results in more cases compared to other object detectors. For example, Mostafa et al. [18] trained YOLOv5, YOLOX, and Faster R-CNN models for the detection of autonomous vehicles. YOLOv5, YOLOX, and Faster R-CNN achieved mean average precision (mAP) at 0.5 thresholds of 0.777, 0.849, and 0.688, respectively; therefore, YOLO outperforms Faster R-CNN. Wang et al. [19] used the YOLOv5 algorithm in shape wake detection in SAR imagery and achieved an mAP score in the range of 80.1–84.8%, proving that YOLOv5 can successfully be used in complex conditions, such as different sea states and multiple targets. Xu et al. [20] trained the YOLOv5 algorithm for ship detection in large-scene Sentinel-1 SAR images, effectivly scoring mAP of 0.7315. Yoshida and Ouchi also used YOLOv5 for ship detection cruising in the azimuth direction and achieved an mAP score of 0.85 [21]. Reviewing the usage of YOLOv5 in SAR imagery proves that YOLOv5 can successfully be used to detect desired features in such complex imagery as SAR imagery. Furthermore, the mAP score in the range 0.7–0.85 seems to be a good score for detection in SAR imagery.
The goal of this paper is to examine a YOLOv5 algorithm as a backbone to an automation system for labeling small Venusian volcanoes over SAR imagery. Furthermore, this paper focuses on Magellan heterogeneous image sets, because it appears to be a larger problem when reviewing Burl et al. [8] and trying to classify all four classes of volcanoes instead of just treating them as the same class. One of the problems with the Magellan dataset is that it contains a relatively small number of labeled images. Today deep learning models require a large number of images for successful training. Based on the idea of this investigation and the literature overview, the following questions were derived:
- Is it possible to achieve good classification accuracy with the YOLOv5 algorithm on SAR imagery and such a small dataset?
- Can classical training data augmentation techniques improve classification accuracy, or are some advanced methods are required?
The structure of this paper can be divided into the following sections: Materials and Methods, Results and Discussion, and Conclusions. In the Materials and Methods section, the dataset description is given as well as the used augmentation methods for training the YOLOv5 algorithm. In Results and Discussions, the results of conducted experiments are presented and discussed. The Conclusion section includes thoughts and conclusions that were obtained during the examination of the results of the experiment and provides answers to the hypotheses defined in the Introduction section.
2. Materials and Methods
In this section, the dataset and its preparation for the YOLOv5 algorithm are explained, as well as the utilized augmentation techniques. The steps taken to properly train a YOLOv5 algorithm on a Magellan dataset are next:
- Formatting the dataset into appropriate YOLO format from a Magellan format;
- Splitting the dataset into training and testing sets;
- Performing the augmentation on a training set to increase the number of training images.
All of the above mentioned steps are more described in the following text.
2.1. Dataset Description
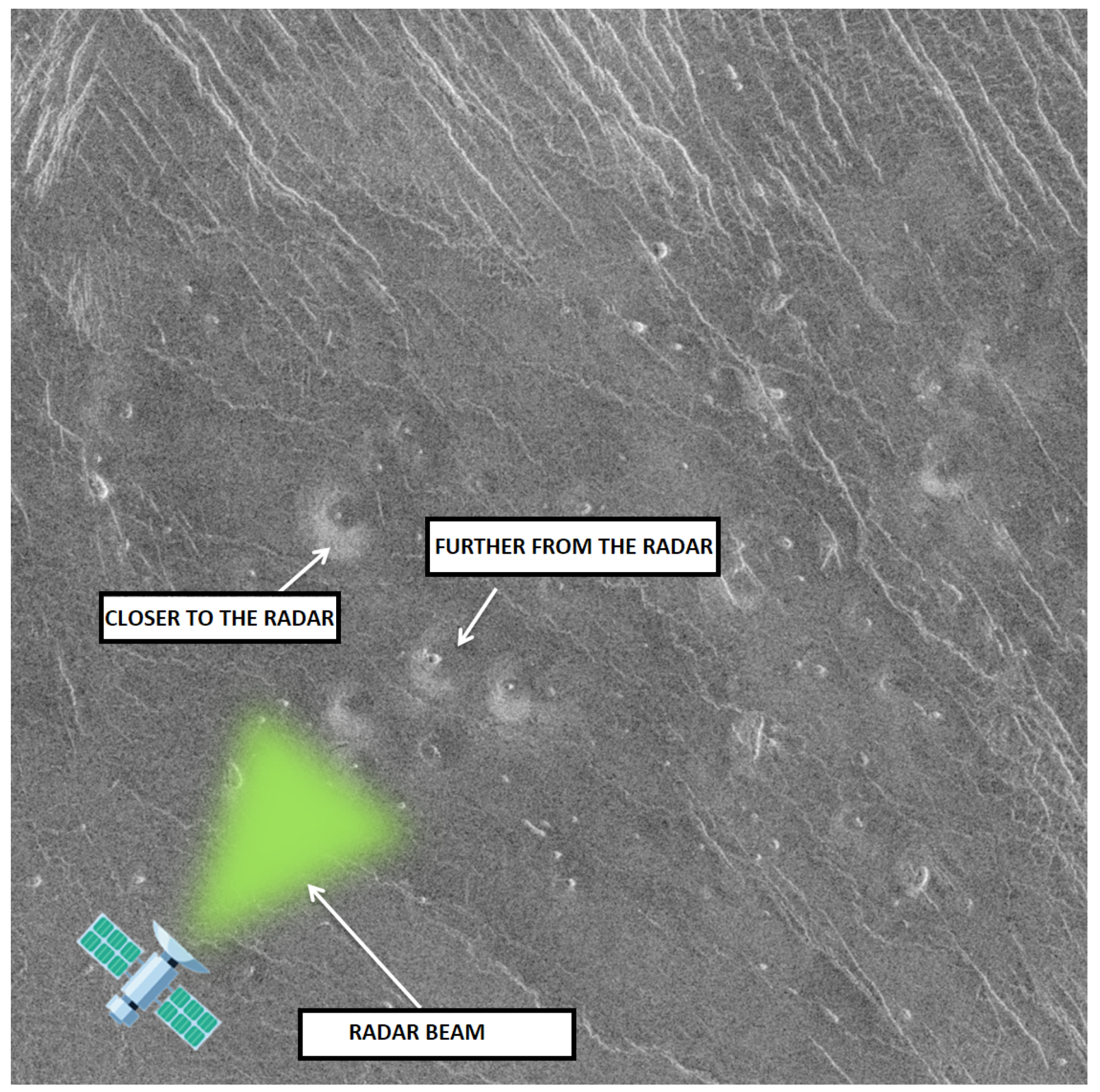
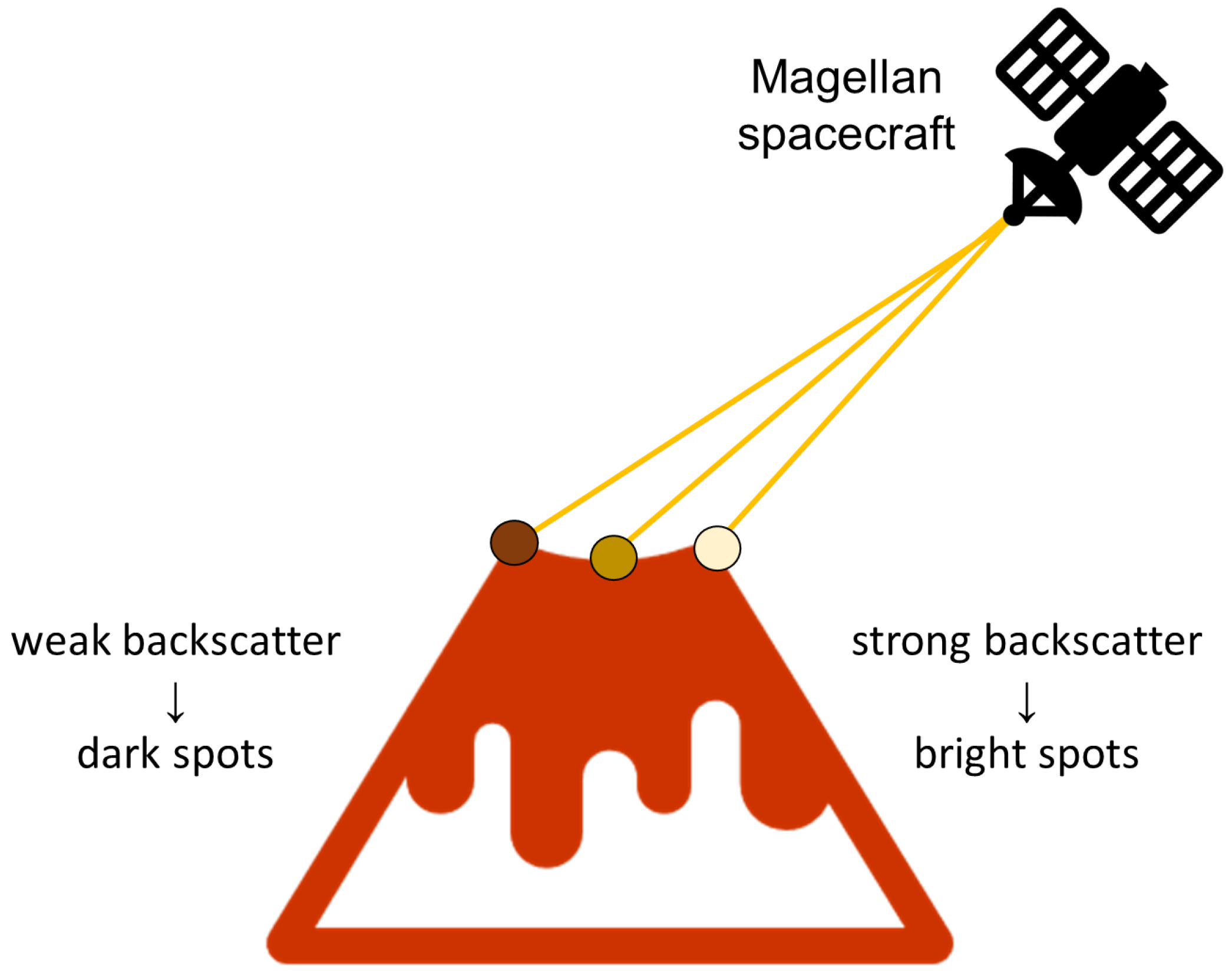
The Magellan data set consists of 134 images with dimensions of 1024 × 1024 pixels representing the surface of planet Venus. Figure 1 shows a 30 km × 30 km surface image of Venus taken by the Magellan spacecraft. Volcanoes on the surface of the planet can be recognized by their so-called “radar signature”, which is a product of the SAR radar, e.g., the side of the volcano facing the radar is brighter, while the opposite side of the volcano is darker.
The reason for this is that the closer side of the object (in this case the volcano), which is facing the direction of the radar, reflects a larger amount of energy back toward the radar sensor, while the farther (darker) side facing the opposite direction scatters the beam into the surrounding space. The brightness of each pixel is proportional to the logarithm of the reflected energy back to the sensor. Accordingly, the typical “radar signature” of a volcano appears as a “light-dark” circular outline with bright pixels in the center [8]; this described phenomenon is illustrated in Figure 2. Brighter pixels in the very center of the volcano usually appear because the SAR beam is scattered within the crater itself. However, if the crater is small compared to the resolution of the image, it is possible that this feature will not appear. The phenomena described above are just some of the features according to which experts have classified volcanoes on the surface.
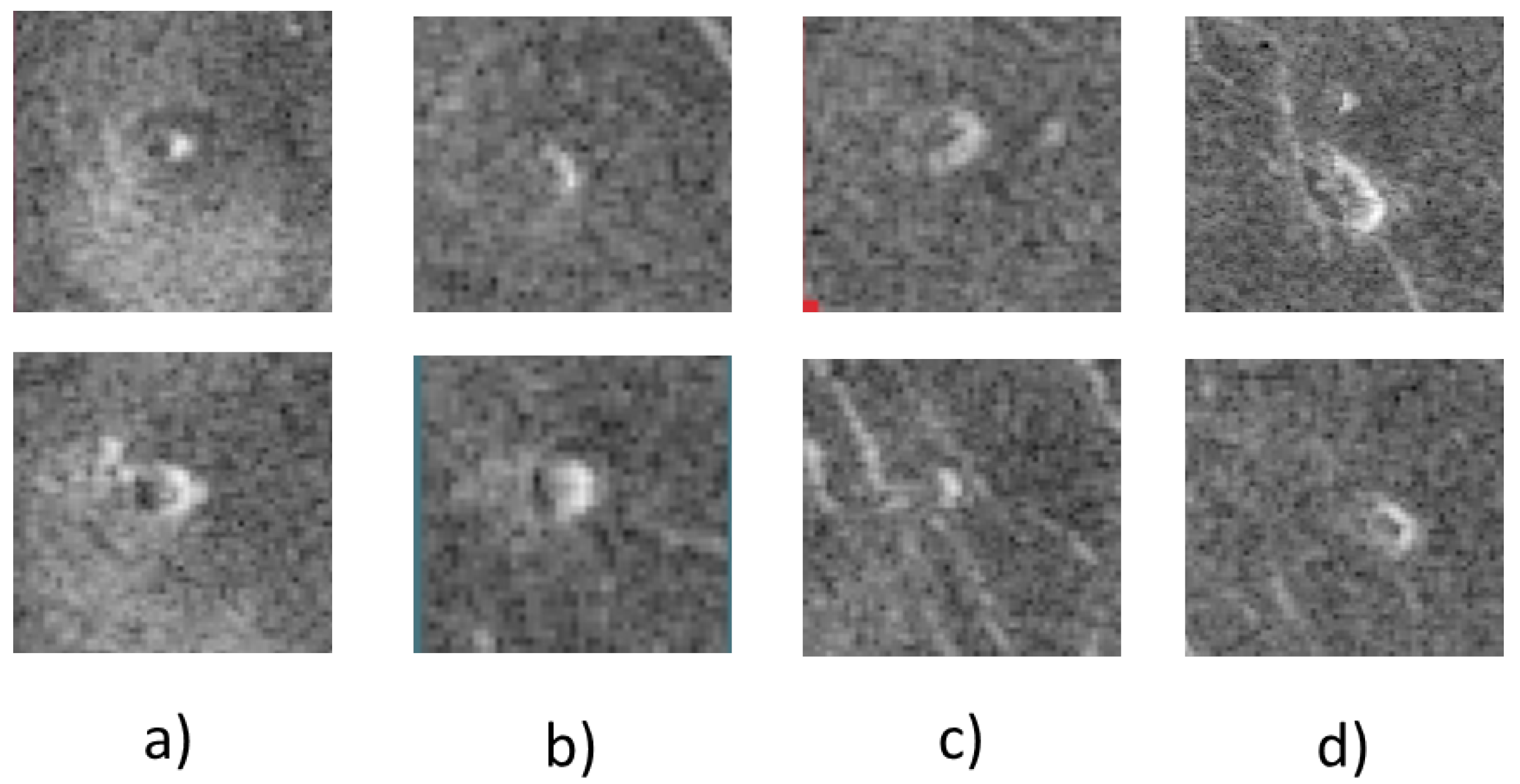
Due to the forested nature of SAR images, even experts cannot determine with 100% certainty whether one of the objects in the image is actually a volcano or not. Unfortunately, this problem occurs due to various influencing factors such as image resolution or signal-to-noise ratio (SNR). Different experts will assign different classes to the same volcanoes for the same image. Based on extensive discussions with experts, Burl et al. [8] propose the next five categories of volcanoes:
- “Category 1—almost certainly a volcano ); the image clearly shows a summit pit, a bright-dark pair, and a circular planimetric outline.
- Category 2—probably a volcano (); the image shows only two of the three category 1 characteristics.
- Category 3—possibly a volcano (); the image shows evidence of bright-dark flanks or a circular outline; the summit pit may or may not be visible.
- Category 4—a pit (); the image shows a visible pit but does not provide conclusive evidence for flanks or a circular outline.
- Category 5—not a volcano ()” [8].
2.2. Dataset Preparation
All images from the data set come in two files of different formats (SDT and SPR) that describe the image. The SPR file is a so-called header file that contains features that describe the image (e.g., image dimensions), while the SDT file contains the binary record of the image itself. Because of this, there is a need to transfer images to a format suitable for learning the YOLO algorithm (e.g., JPEG or PNG format). On this occasion, the vread.py script was developed. Its purpose is to load images from the given two files into the Python environment and return them in PNG format, which is suitable for learning the algorithm. Each image from the data set also contains the so-called ground-truth file of the same name, which indicates the location of the volcano in the image and its belonging to a certain class. Ground-truth files are also called labels (in TXT format). In the Magellan data set, the ground truth comes in the LXYR format, the structure of which is shown in Table 2. The first digit indicates the class of the volcano, the second digit indicates the x-coordinate of the origin (in pixels) of the circle, the third indicates the y-coordinate of the origin of the circle, and the last digit indicates the radius of the circle.
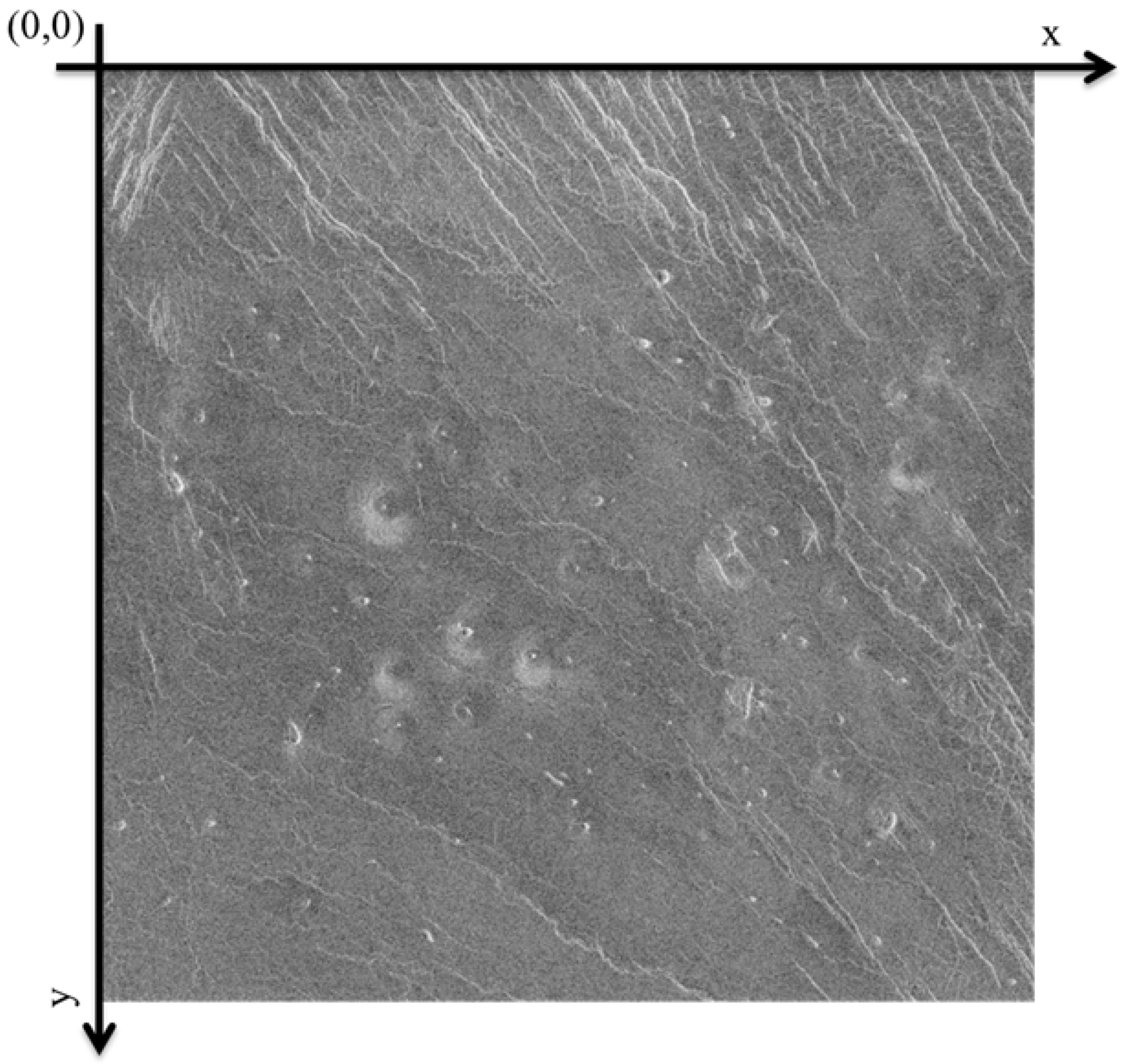
When marking images, the coordinate system is located in the upper left corner of the image itself, an example of the image coordinate system is shown in Figure 4.
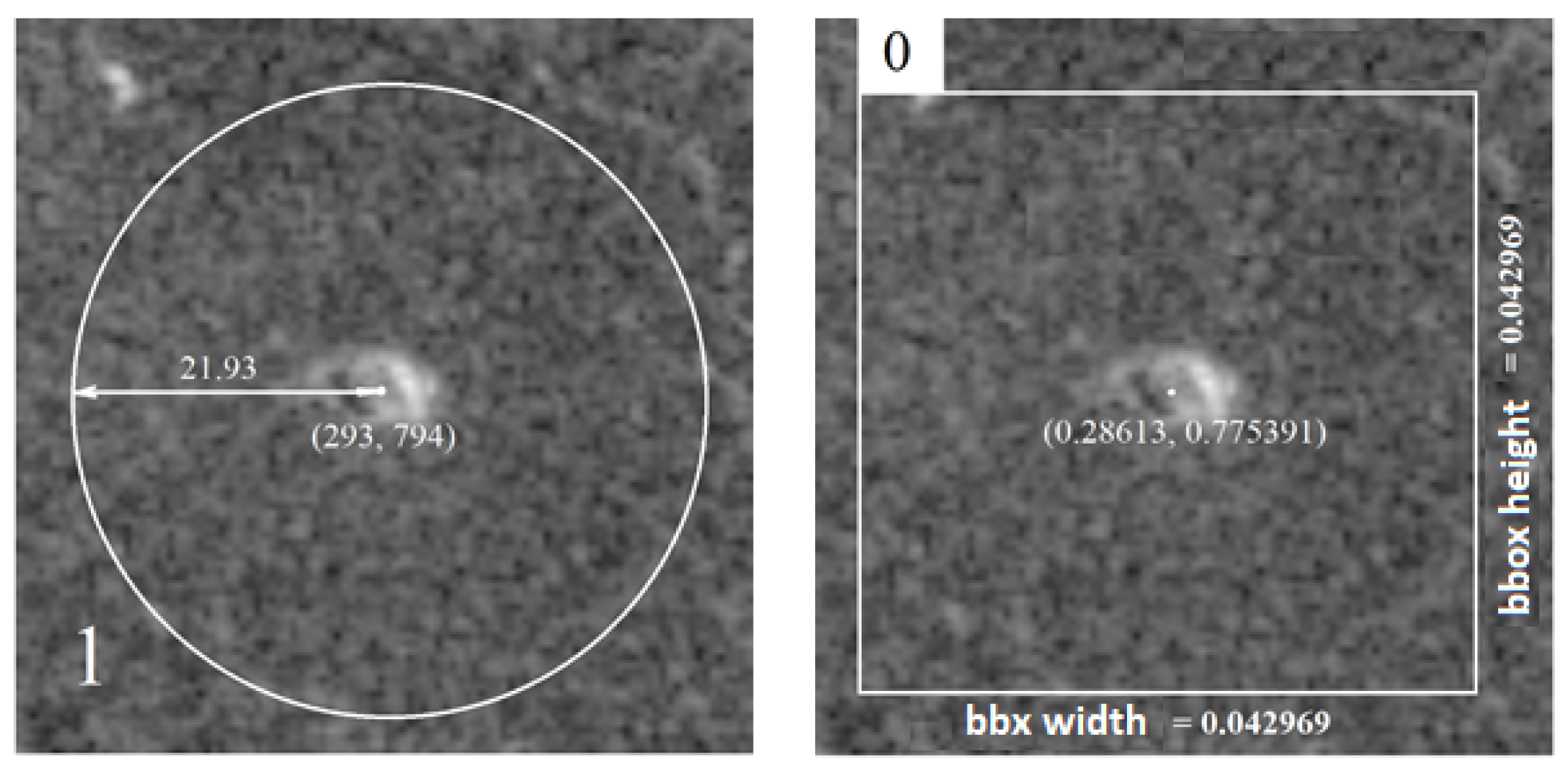
An example of a label for the YOLO format is shown in Table 3 where the first digit indicates the class of the volcano, the second digit indicates the x-coordinate of the origin, the third indicates the y-coordinate of the origin, and the last two digits indicate the width and height of the bounding box that describes the object normalized to the values [0, 1].
Examples of the difference between the above two formats are shown in Figure 5, where the basic difference between the two object annotation formats can be observed. The Magellan annotation format expresses its center coordinates in pixels, while in the YOLO format, they are normalized. Another visible difference is that the Magellan format uses a circle to mark the object in the image, while the YOLO format uses a rectangle or square to mark it. The last but important difference in the annotations is that, in the YOLO format, class belonging marks start from the number zero, while in the Magellan format, they start from the number one.
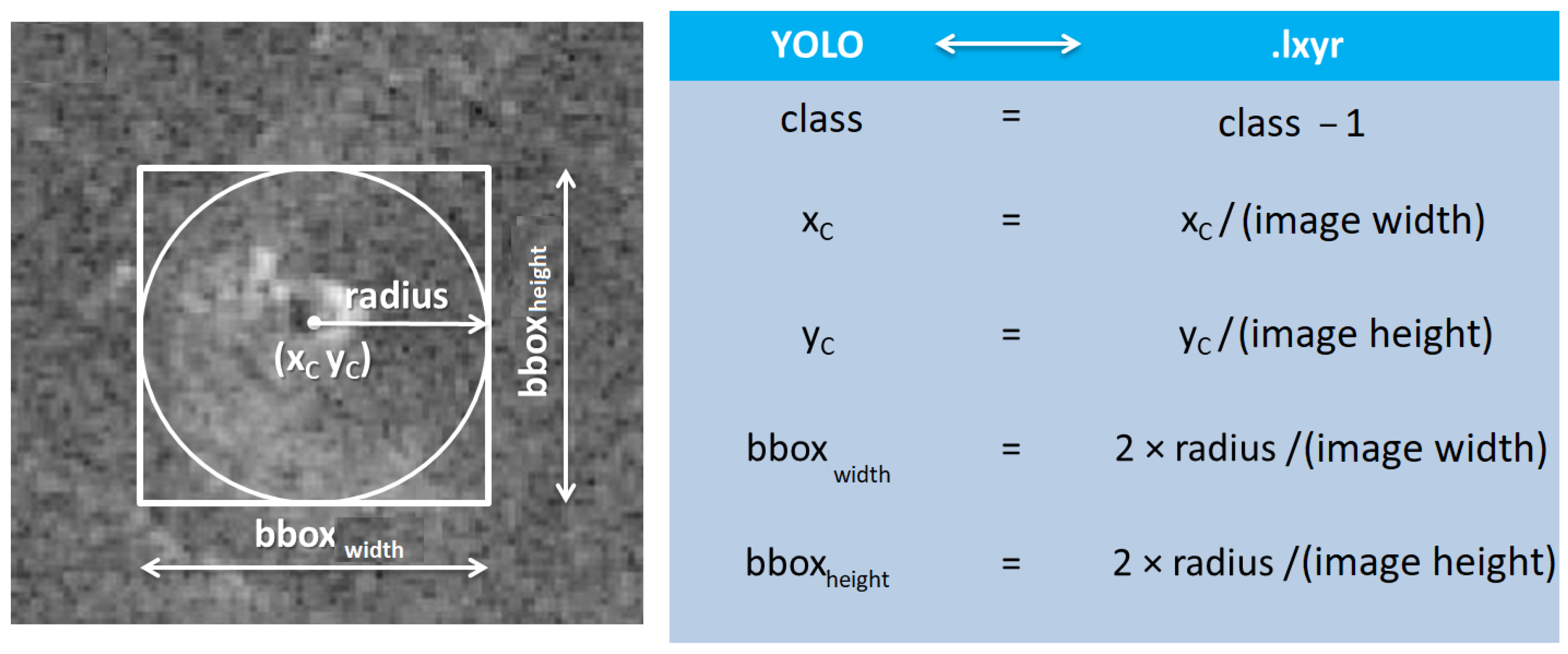
Due to the sheer difference in annotations, there was a need to develop a way to convert the labels from the Magellan format to the YOLO format, which is suitable for learning. For this purpose, a script was created. This function loads LXYR format files and converts them to YOLO format as shown in Figure 6.
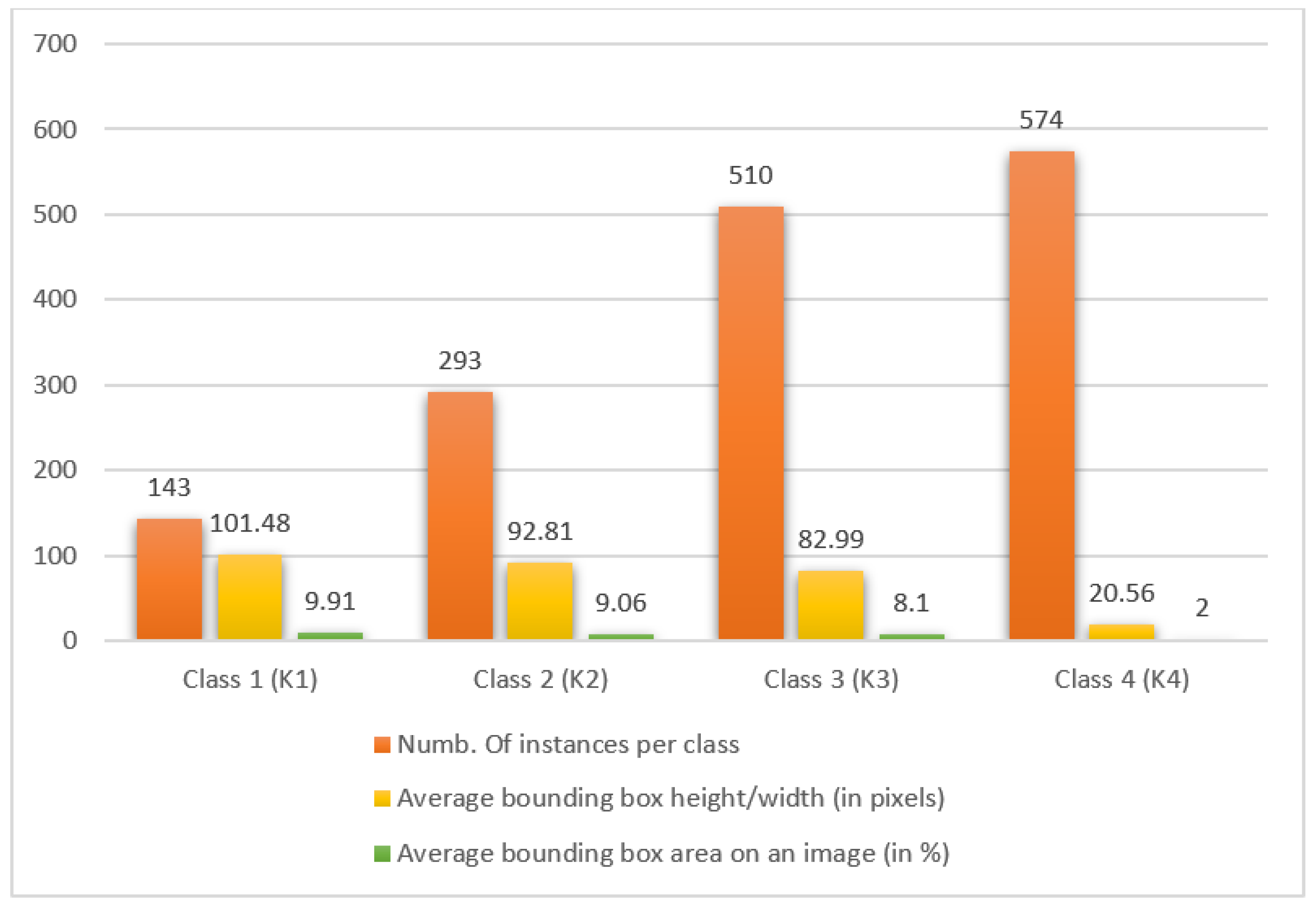
As already mentioned in the introduction of this chapter, the Magellan data set consists of a total of 134 images with dimensions of 1024 × 1024 pixels. The data set consists of a relatively small number of images, which presents separate challenges when successfully training the model. In Figure 7, a graphic representation of the data set analysis is shown separately for each class. The first column shows the number of instances per class, i.e., the number of objects per class in the data set. The second column shows the average dimensions of an object of that class, while the third column shows how much average image area these objects occupy. From the graph, it can be concluded that the data set is rather unbalanced, i.e., certain object classes are overrepresented, while some classes are underrepresented. There are a total of 1520 marked volcanoes in the Magellan data set, of which 574 (37.76%) are from class four and 510 (33.55%) from class three, while from classes one and two there are 143 (9.41%) and 293 (19.28%) volcanoes. In the second case, it can be observed that objects from class one are the largest, while objects from class four are very small (≈20 × 20 pixels) and occupy an average of 2% of the total image area, which presents some difficulties in the detection and classification of such objects.
2.3. Dataset Augmentation
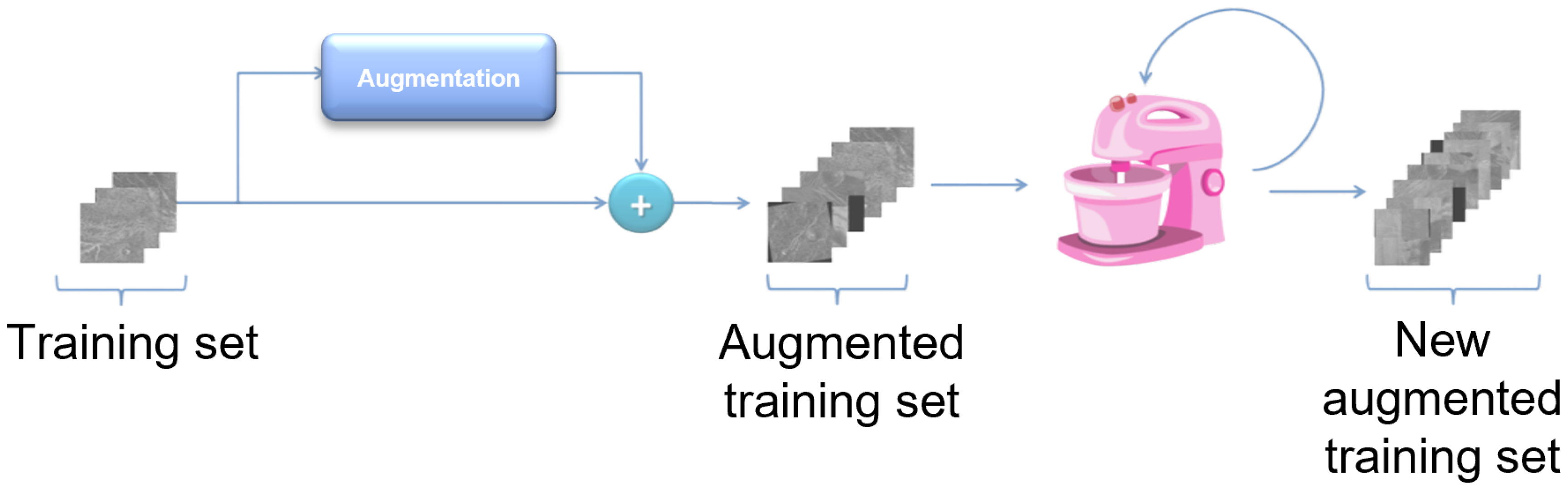
Due to the relatively small number of images in the Magellan data set, a sufficient number of images could not be distributed in the training set to effectively train the model. The number of images in the training set can be artificially enlarged by augmentation techniques. Augmentation is the process of artificially increasing the amount of new data from existing data [22,23]. This includes adding minor changes to the data or using machine learning models to generate new data or geometrical transformations. A schematic representation of data augmentation is shown in Figure 8.
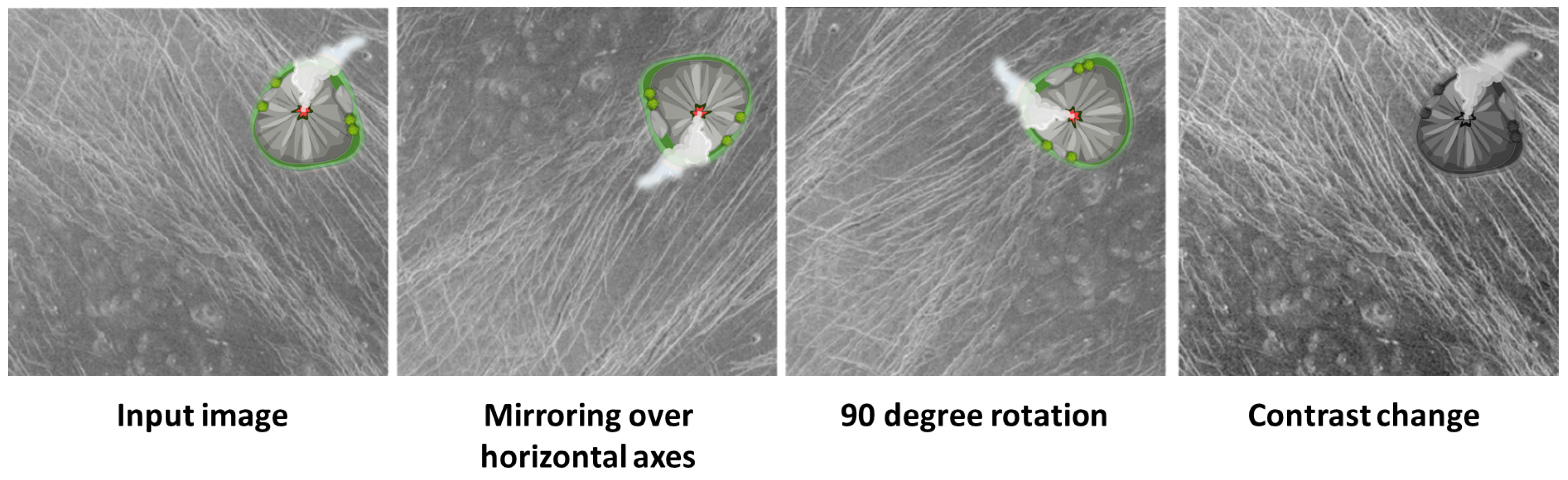
When augmenting the data set, care must be taken to avoid the so-called data leak, i.e., the order between the division of the data set and the augmentation is important. If data augmentation is done before dividing the data set, there is a problem where two versions of the same image (containing the same features) are found in the training and testing sets. If this happens, the results of such a model are not valid and should be approached with caution. During the augmentation of the training set, an attempt was made to make meaningful augmentations, i.e., manipulation of the images was done in such a way that the new artificially obtained images sufficiently represent the environment in which volcano detection is done. During image processing, some examples of augmentation techniques are rotation, mirroring, contrast change, zooming, translation, etc. [22]. The authors used geometric transformations in the augmentation of satellite images, for the reason that objects in satellite images are viewed from above, so transformations such as mirroring across the horizontal or vertical axis, and rotations generally do not add unwanted features to the training set. When augmenting the training data set, the following methods were used:
- Rotations for 90°, 180°, and 270°;
- Mirroring across horizontal and vertical axes;
- Change of contrast, brightness;
- Cutout technique.
In Figure 9, some of the augmentation techniques used are shown (points 1–3).
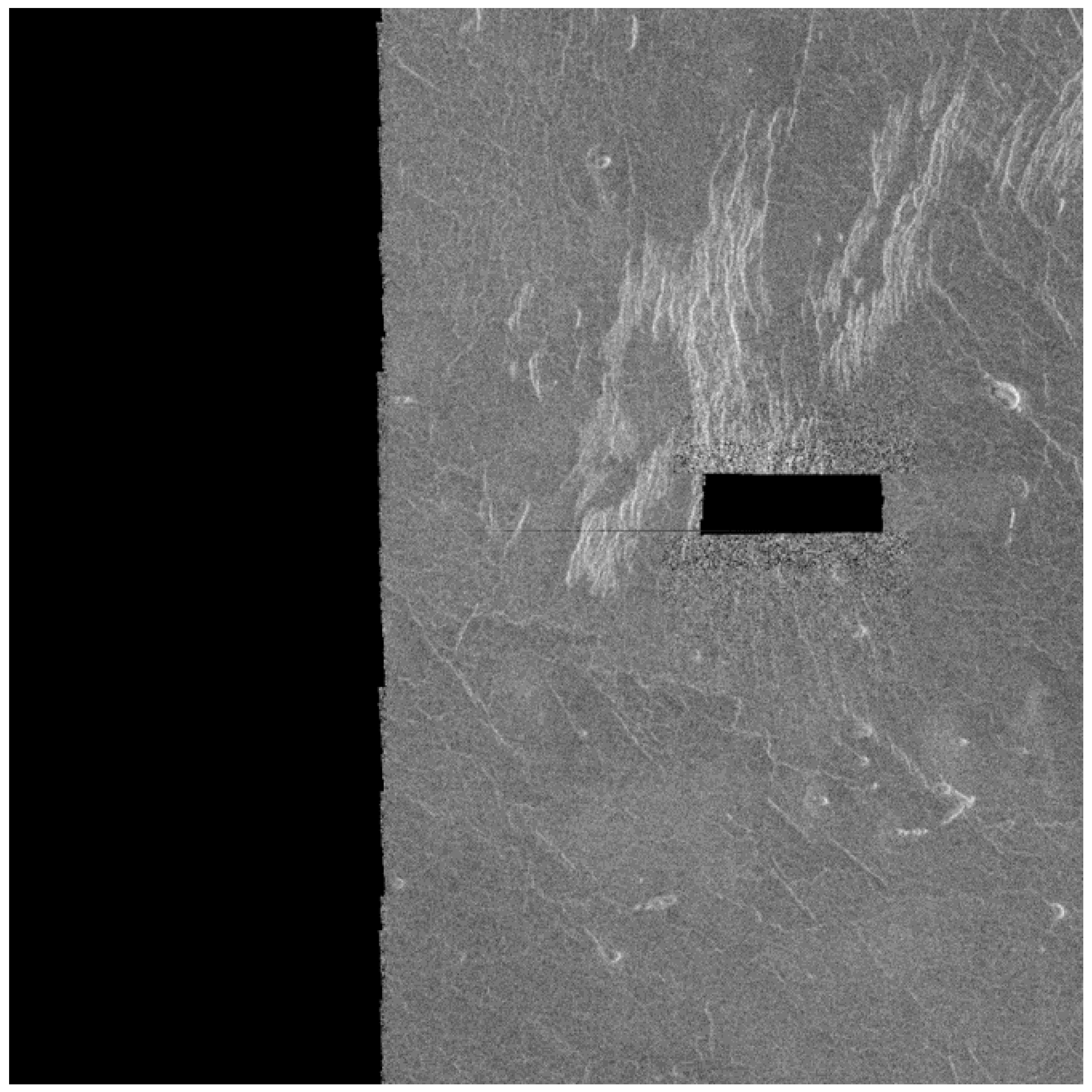
If some of the images from the Magellan data set are looked at, it can be noticed that some images have “black zones”. They arise when the radar failed to catch the return rays or when part of the planet’s surface was not in range. Figure 10 shows an example image with a “black zone”.
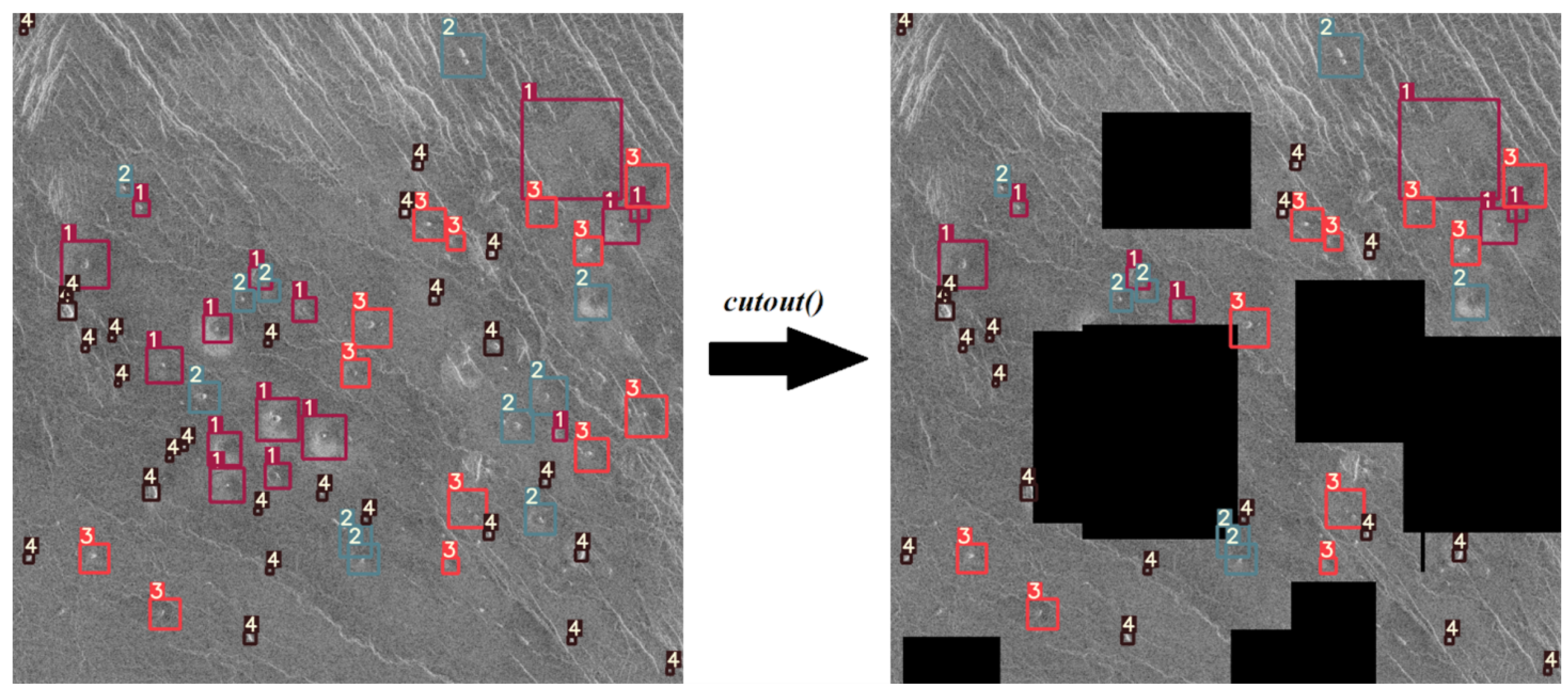
To simulate this phenomenon, a cutout() function was implemented which draws black rectangles of random dimensions and in random locations. Then the same function checks according to the label files (annotations) whether it covered more than 50% of the surface of a volcano. If the black rectangle covers more than 50% of the surface of a volcano, it is deleted from the list of annotations. An example of this augmentation technique is shown in Figure 11.
Augmentation Pipeline
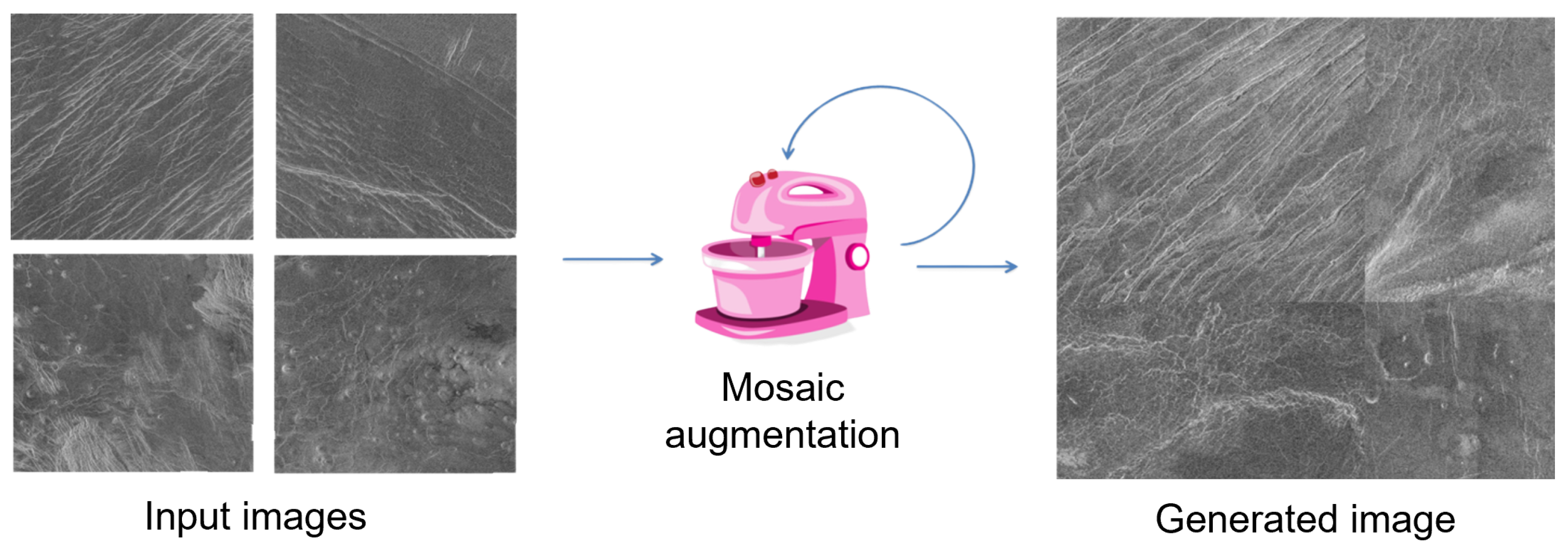
Since it was not possible to artificially increase the number of images to a sufficient number with classic augmentation methods, a more advanced augmentation technique had to be used. To obtain a sufficient number of images and objects for model training, in addition to the classic augmentation technique, mosaic augmentation was used. In Figure 12, a schematic representation of the implementation of the augmentation pipeline using mosaic augmentation is presented. In addition to the classical augmentation of the data set, mosaic augmentation was serially added to artificially increase the number of images. The reason for using classical augmentation in this series is to maximize the number of images before entering mosaic augmentation to obtain as diverse several images as possible.
The mosaic augmentation technique works on the principle of artificially generating a new image from two or more images (usually 4), which is composed of smaller parts of the previous images. This augmentation method is not always convenient to use because it can generate new images that have some new features that are not representative of the cases of the environment in which the model will operate. In this case, this augmentation technique is suitable for use. An example of mosaic augmentation is shown in Figure 13.
2.4. YOLOv5 Algorithm
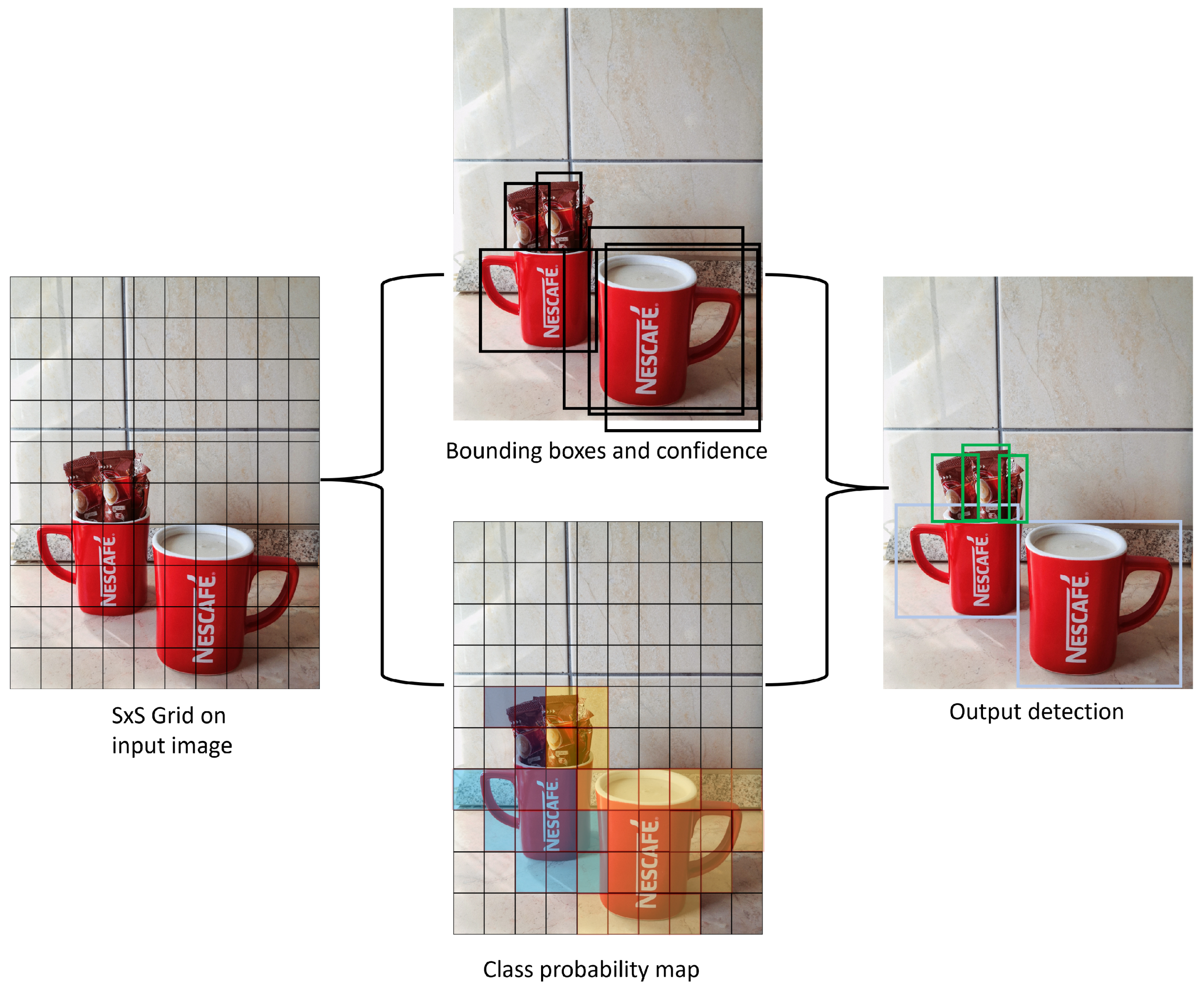
YOLOv5 is a family of one-stage architectures for real-time object detection developed by Ultralytics [17]. This version of the algorithm is based on the original YOLO algorithm developed by Redmon et al. [24], and is currently one of the most well-known and used architectures. Before the creation of YOLO, CNNs with two-stage architectures were used in computer vision. Two-stage networks divide an input image into bounding boxes, then run a classifier on the bounding boxes, and remove the duplicate detections. YOLO algorithm works on the principle of dividing the input image into a matrix with S × S cells of equal dimensions Figure 14. Each of these S cells is responsible for the detection and localization of the object it contains. Accordingly, in addition to the localization of the object, these cells also perform the classification of the object within them, and therefore the position of the object within the cell and its predicted class with probability are obtained as an output. Such a working principle is a one-stage architecture and results in less computing time.
YOLOv5 Structure
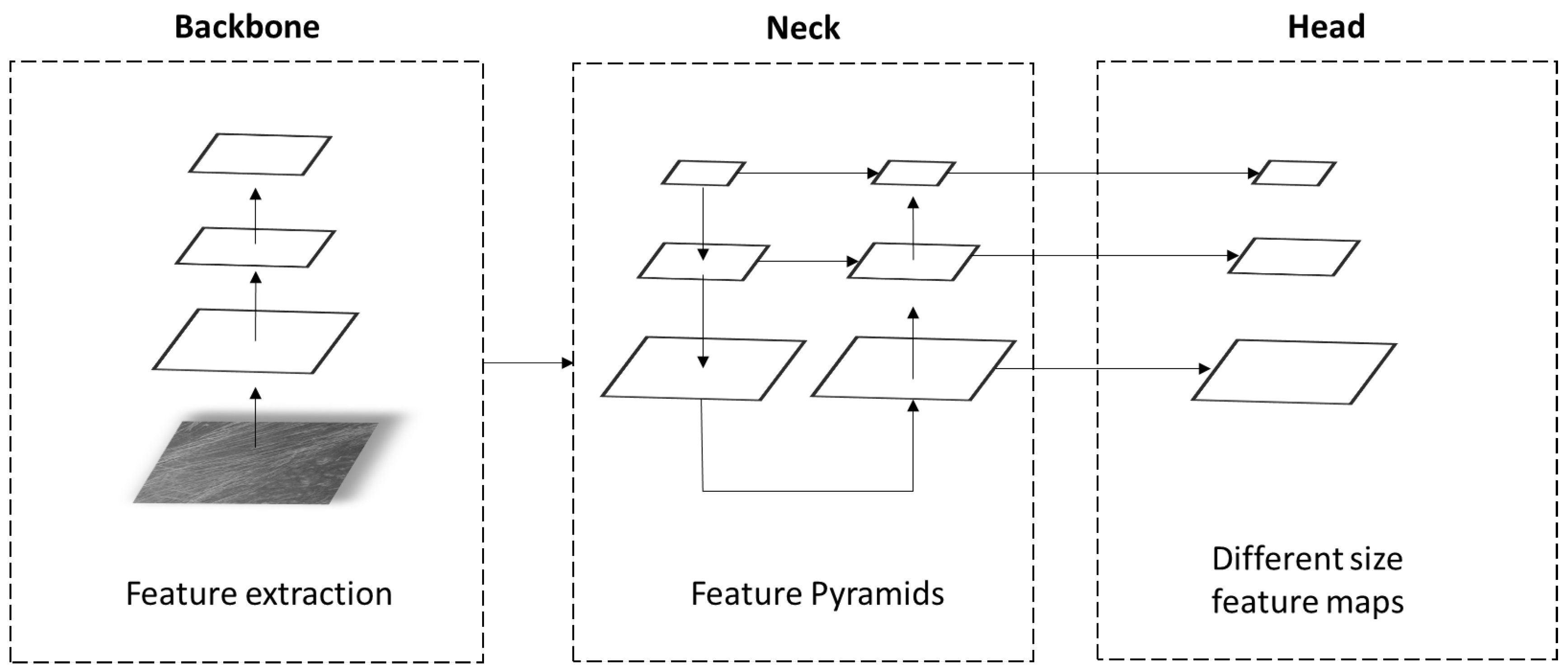
The architecture of the YOLOv5 algorithm consists of three main components: backbone, head, and neck. The architecture of the YOLOv5 model is shown in Figure 15.
The backbone layer is mainly used to extract important features from a given input image. The backbone of the YOLOv5 architecture is called CSPDarknet-53, and it contains 23 residual units [25]. Residual units are made from one CNN layer with one 3 × 3 layer and one 1 × 1 layer. After the convolutional layer comes a batch normalization layer, followed by an activation function. The YOLOv5 CSPDarknet-53 backbone is pretrained using the ImageNet database [26]. After the backbone layer, comes the neck with path aggregation network (PANet) [27]. PANet adopts a new feature pyramid network structure with an improved bottom-up path that improves the diffusion of low-level features [28]. PANet improves the localization signals in lower layers, which results in a better prediction of the object’s position. The last part of the YOLOv5 structure is the head. The head uses a feature pyramid network (FPN) to detect objects at three different scales [25]. In short, the head layer generates three feature maps of different sizes that are used for multi-scale prediction effectively allowing a model to find large to small-sized objects on images.
2.5. Evaluation Method
The detected object’s result can be divided into three possible outcomes. The first outcome defines the bounding box with correct detection, which means that the detected object is identified as true positive (TP). The second outcome defines a bounding box with incorrect detection, which is considered a false positive (FP), and the third possible outcome defines that the object is not detected with the bounding box (false negative (FN)). Based on the three possible outcomes, there are two evaluation metrics defined, precision (P) and recall (R) [29]. Precision and recall can be calculated using the following equations:
A model is trained well if it has high Precision and Recall metrics. An ideal model has zero FN predictions and zero FP predictions, which means that both Precision and Recall are equal to one.
Using the above-mentioned parameters, the F-measure can be calculated. F-measure (commonly known as F1-score) [30] is the localization detection performance, which can be expressed using the following equation:
The next measure that is used is intersection over union (IoU) [31]. The IoU evaluates the degree of overlap between the predicted effectively box and the bounding box is considered to be an accurate prediction, and is defined by the following expression:
where:
- A represents the predicted bounding box;
- B represents the correct prediction.
IoU takes values between zero and one, where zero represents no overlap, and one represents the complete overlap between two bounding box frames. This measure is useful by setting a threshold value (for example, a threshold value α) and using that threshold it can be decided whether the detection made by the model is correct or not.
Average precision, or AP@α, is the area under the Precision–Recall (PR) curve evaluated at the threshold value α. Mathematically, it is defined by the following expression:
where:
- AP@α represents average precision;
- p(r) represents the P–R curve function;
- α represents a treshold value.
AP@α means that the average precision is evaluated at a threshold value (IoU threshold) equal to α. If there are measurements written as AP50 or AP75, they only mean that AP is calculated for values of IoU = 0.5 or IoU = 0.75. AP is calculated individually for each class. This means that there are as many AP values as there are classes. To obtain an estimate of the precision of the model overall for all classes, the mean value of APs of all classes is calculated and this metric is called the mean average precision (mAP) [32]. mAP is defined by the following expression and is one of the main metrics used to evaluate model performance:
where:
- mAP@α represents mean average precision;
- n represents number of classes;
- APi represents average precision for a given class i.
2.6. K-Fold Cross Validation
Because of the relatively small dataset, standard practices such as splitting the dataset into two parts for training and testing is not sufficient for providing relative results for model estimation. To provide truthful model estimation, cross-validation was used.
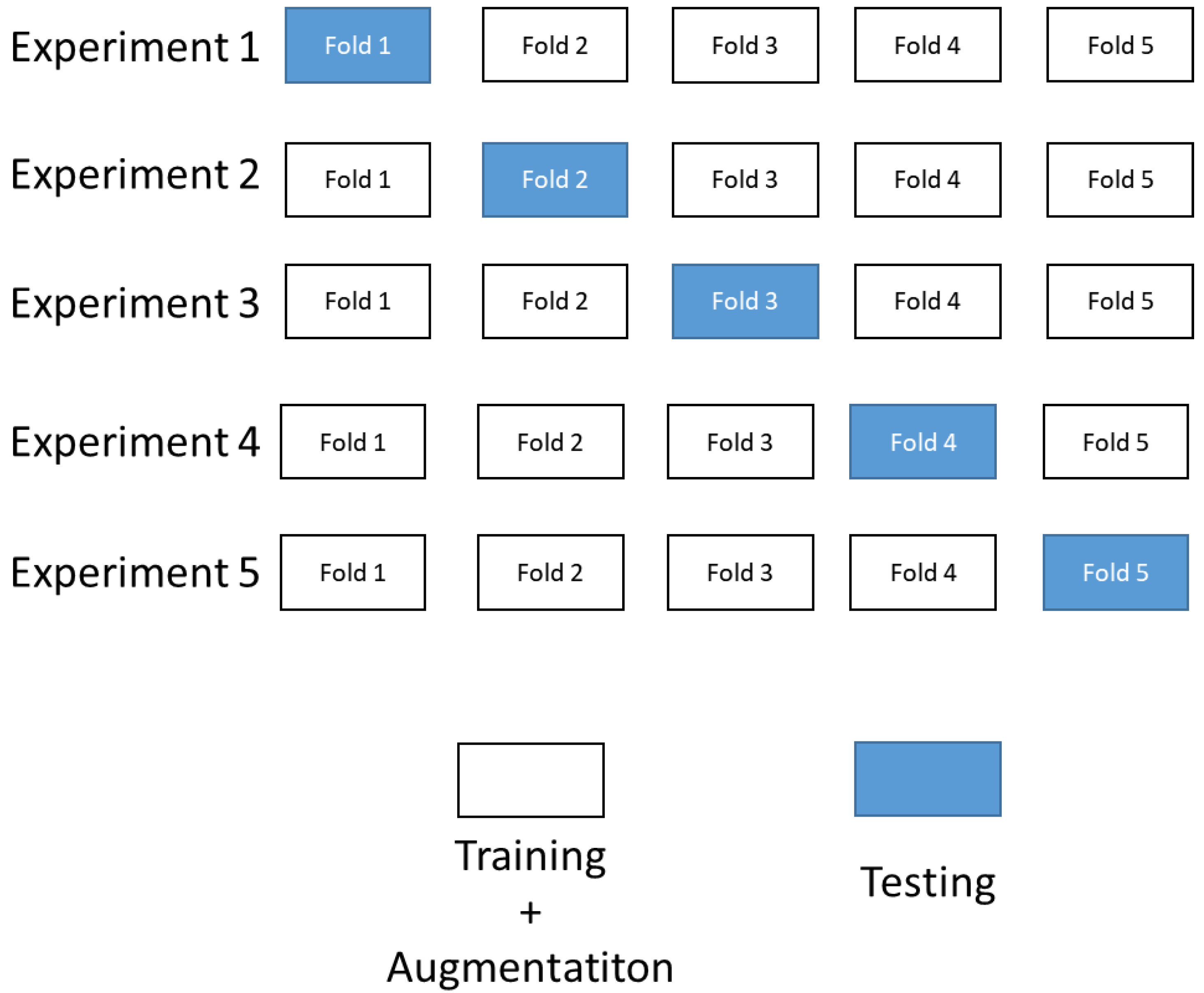
The k-fold cross-validation (KCV) technique is one of the most used approaches for model estimation. The KCV consists of splitting a dataset into k subsets, then iteratively some of them are used to train the model, while the others are used to assess the model’s performance [33,34,35]. In practice, the typical choice of k is between 5 and 10. Yung [36] mentions that k < 5 might cause an issue and thus not give reliable model estimation. In this paper, because of the above mentioned reasons, the 5-fold cross-validation is used. The initial dataset is randomly divided into five equal folds (k = 5), where four folds of the dataset (k − 1) will be used for the training of the model, and one fold will be used for testing the model. This procedure is repeated five times, where each time a different fold is used for model testing (Figure 16).
After finishing experiments, models are estimated using average values and standard deviation from all experiments for mAP, Precision, Recall, and F1 score values. For example, the average value for Precision is calculated using:
where:
- P represents average precision from all experiments;
- N represents number of experiments;
- Pi represents precision for a given experiment i.
Standard deviaton for Precision metric can be calculated using:
where:
- δ (P) represents standard deviation of precision from all experiments;
- N represents number of experiments;
- Pi represents precision for given experiment i;
- P represents the average value of Precision from all experiments.
Average values and standard deviation from all other metrics are calculated using the same principle.
3. Results
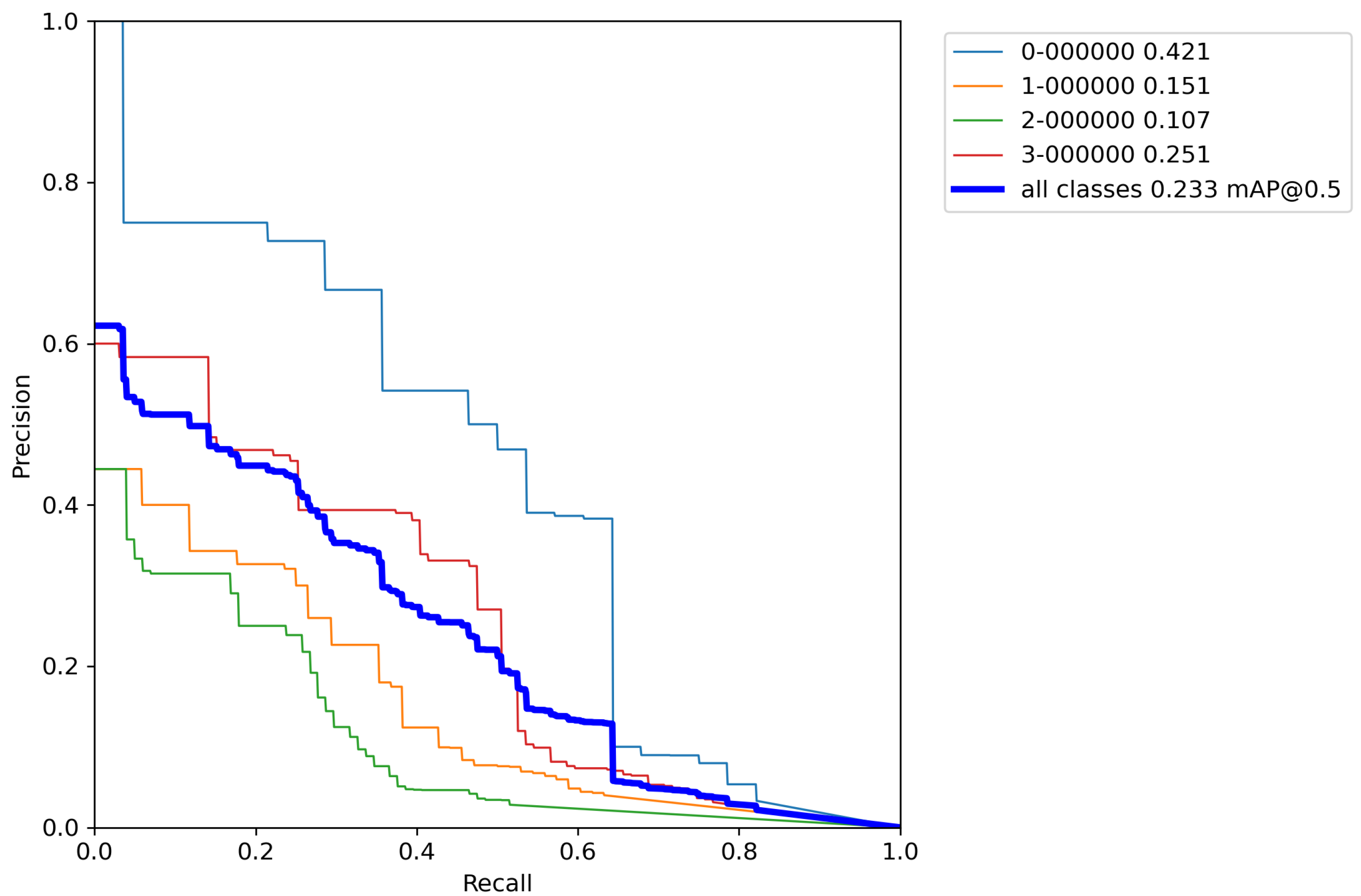
In this section, the results of the experiments using the YOLOv5 algorithm with cross-validation on the Magellan dataset are presented. Classification accuracy on a validation set is presented using previously described metrics such as mAP, F1 score, Precision, and Recall. Furthermore, Appendix A, Appendix B and Appendix C contains Precision–Recall (P-R) curves from all trained models using the cross-validation method.
Before starting training and evaluating the results of the model, it is necessary to determine the basic model based on which, by changing hyperparameters and data augmentation techniques, comparison and assessment of the accuracy of the investigated models will be made. The pretrained YOLOV5l6 model was used as the base model with the transfer learning method. YOLOv5l6 weights were pretrained on a COCO dataset [37]. The reason for using transfer learning is that with randomly generated weight coefficients, due to the relatively small number of images, it would not be possible to obtain a sufficiently precise model, and this method has proven to be a good choice for relatively small datasets in the past. Hyperparameters of the YOLOv5l6 model are given in Table 4.
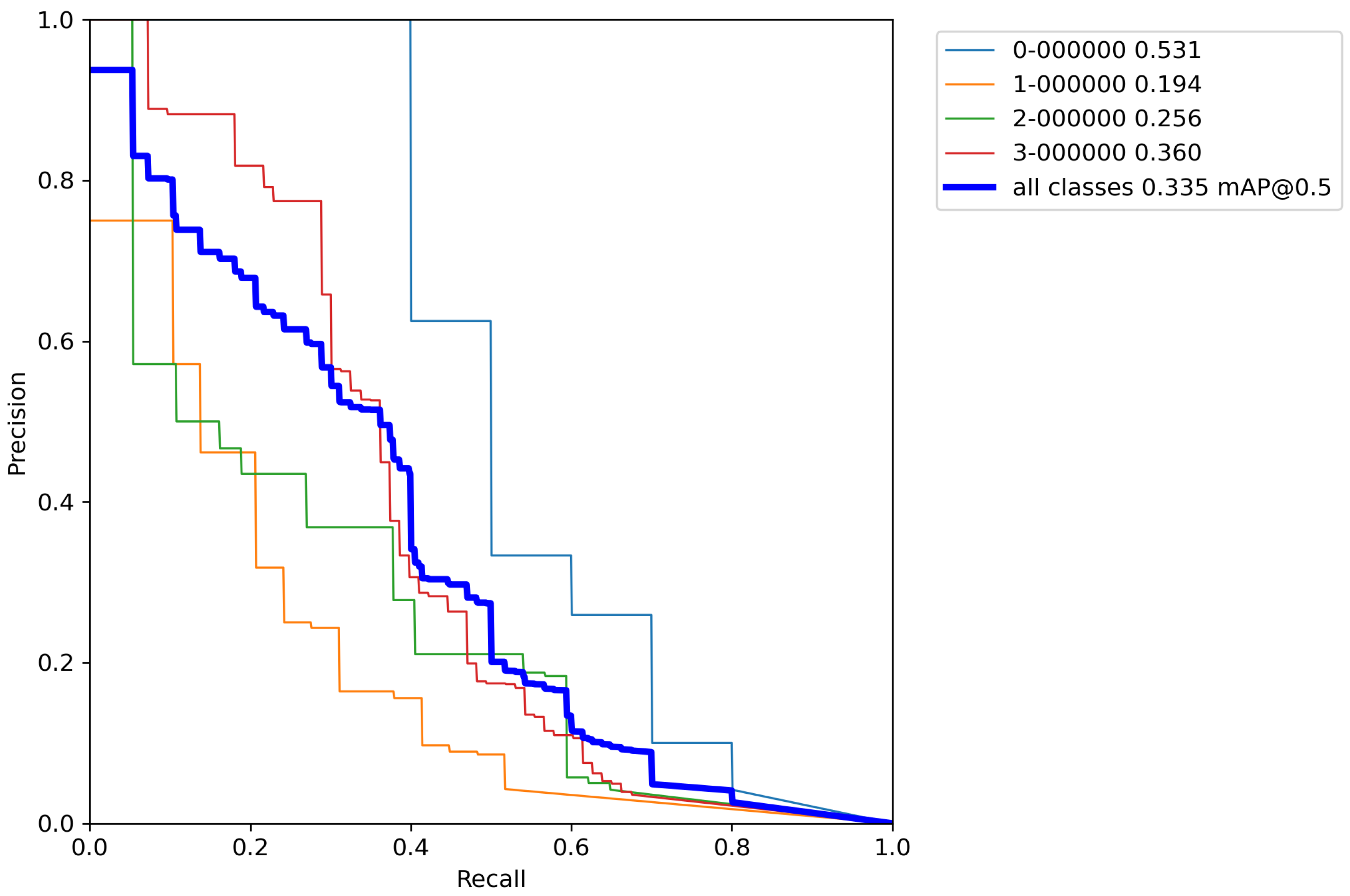
First, the base model with pretrained weights, and without performing any augmentation techniques on a training set was trained for reference. The results of cross-validation metrics for the base model can be seen in Table 5 and Appendix A.
After calculating the average value and standard deviation from all cross-validation experiments performed on a base model, the evaluation of a base model can be seen in Table 6. Furthermore, Figure A1, Figure A2, Figure A3, Figure A4 and Figure A5 contains P–R curves of the trained base model.
Next, the same cross-validation procedure was performed on a base model, but this time using classical augmentation techniques on a training set. Results of cross-validation metrics for the model can be seen in Table 7.
After calculating the average value and standard deviation from all cross-validation experiments performed on a base model with classical augmentation techniques, the evaluation of a model can be seen in Table 8. Furthermore, Figure A6, Figure A7, Figure A8, Figure A9 and Figure A10 contains P–R curves of the model trained using classical augmentation techniques.
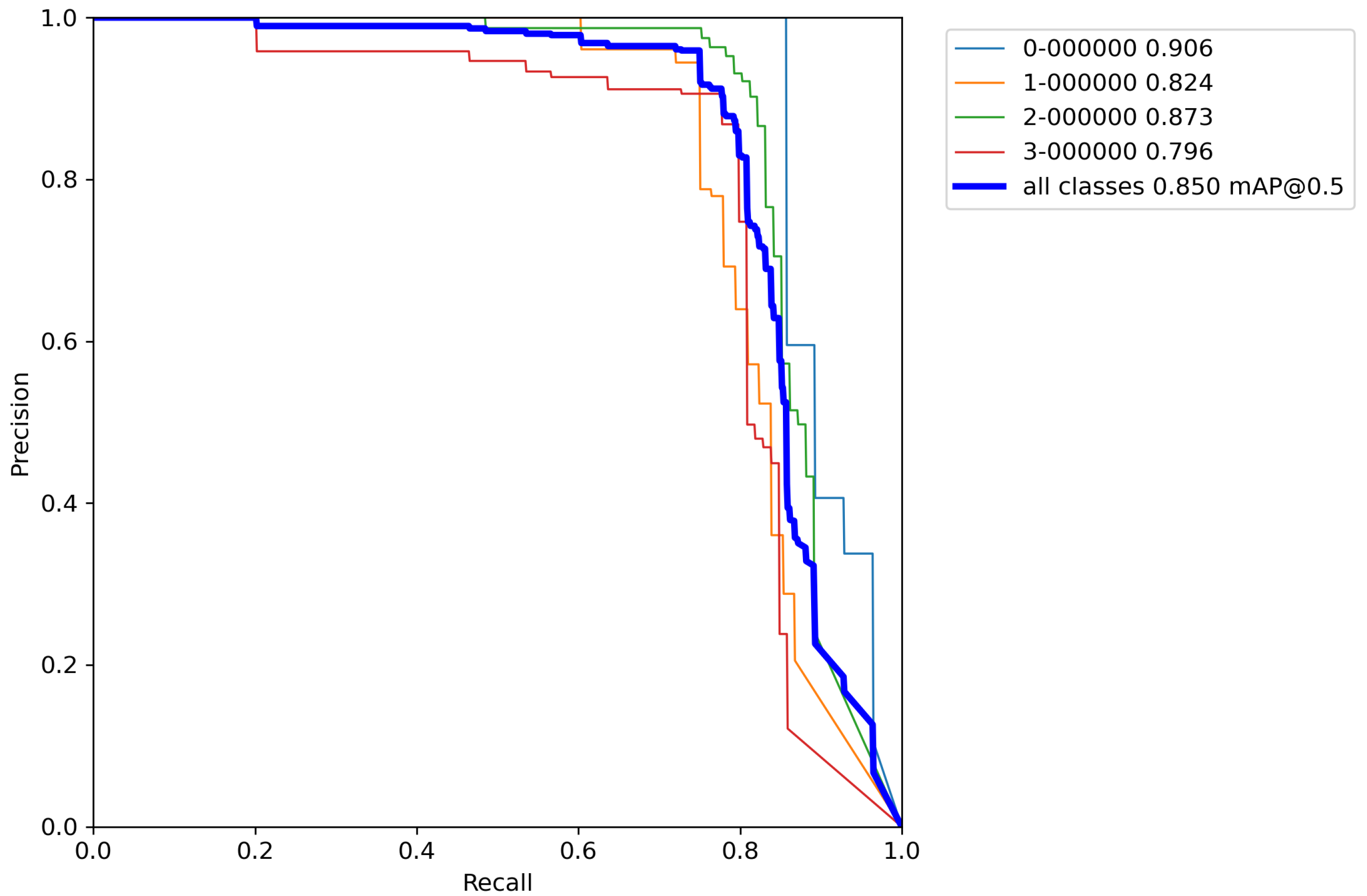
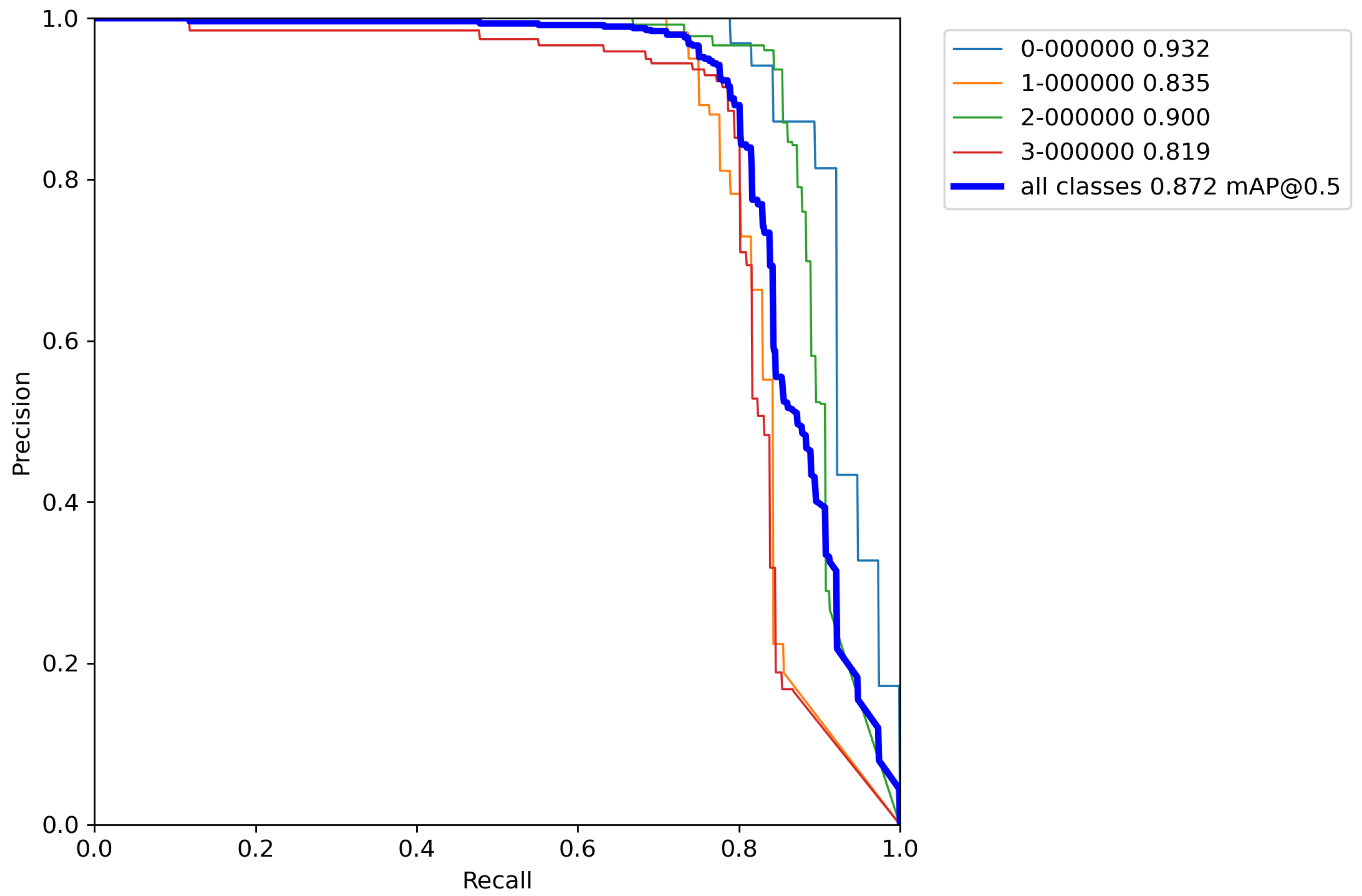
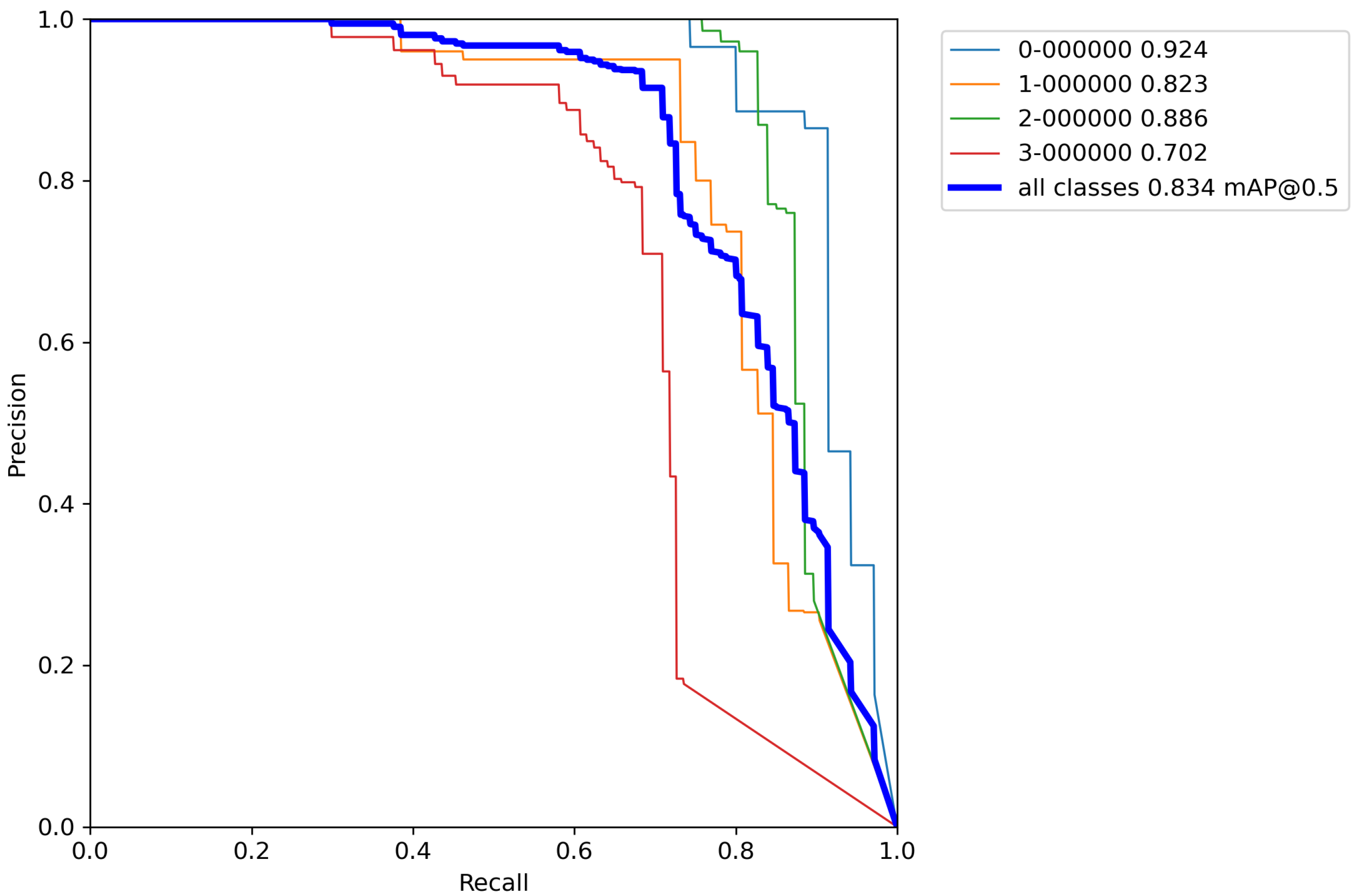
Finally, for the last cross-validation procedure, the proposed augmentation pipeline technique was used on a training set. The results of cross-validation metrics for the model can be seen in Table 9.
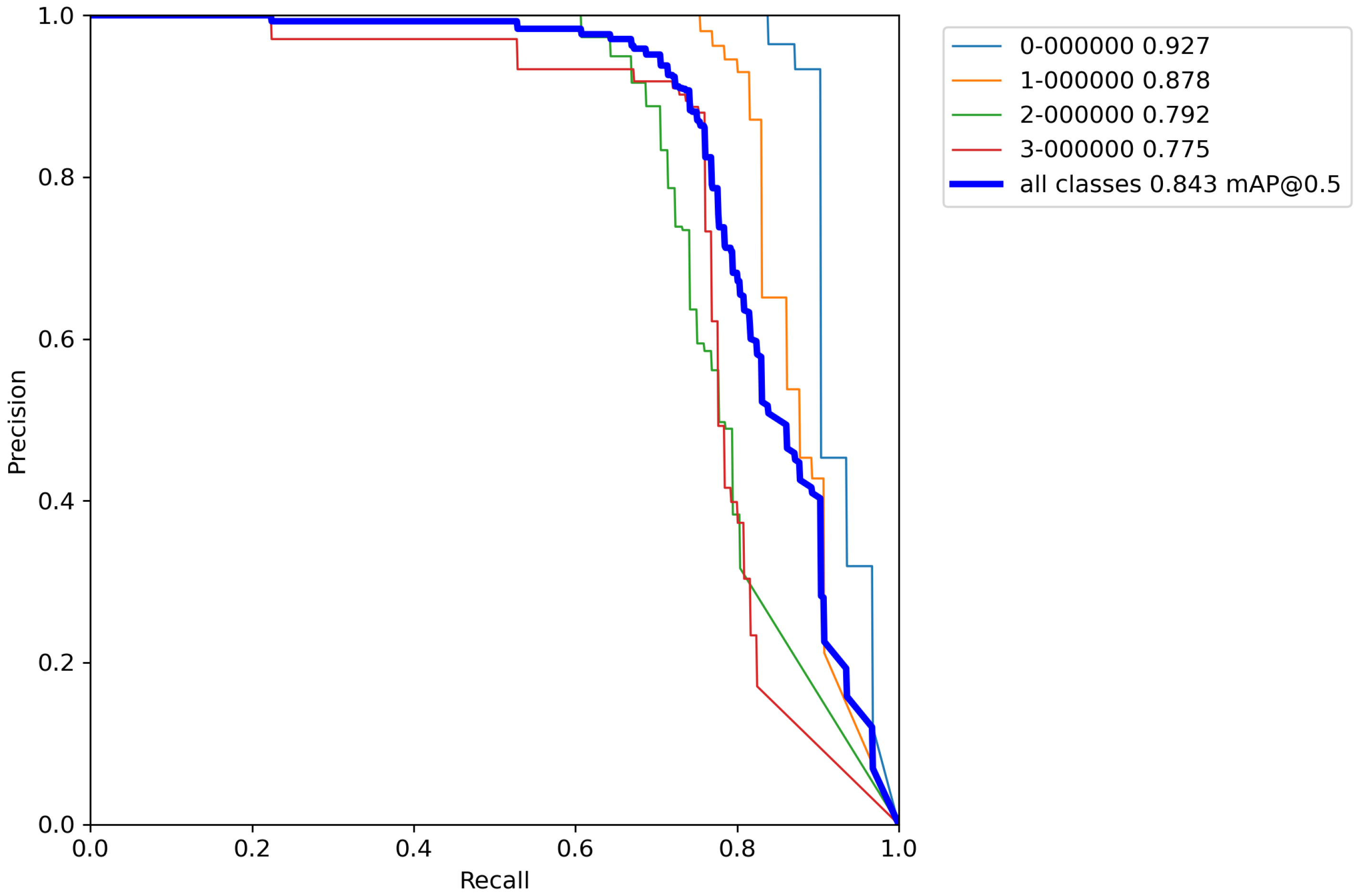
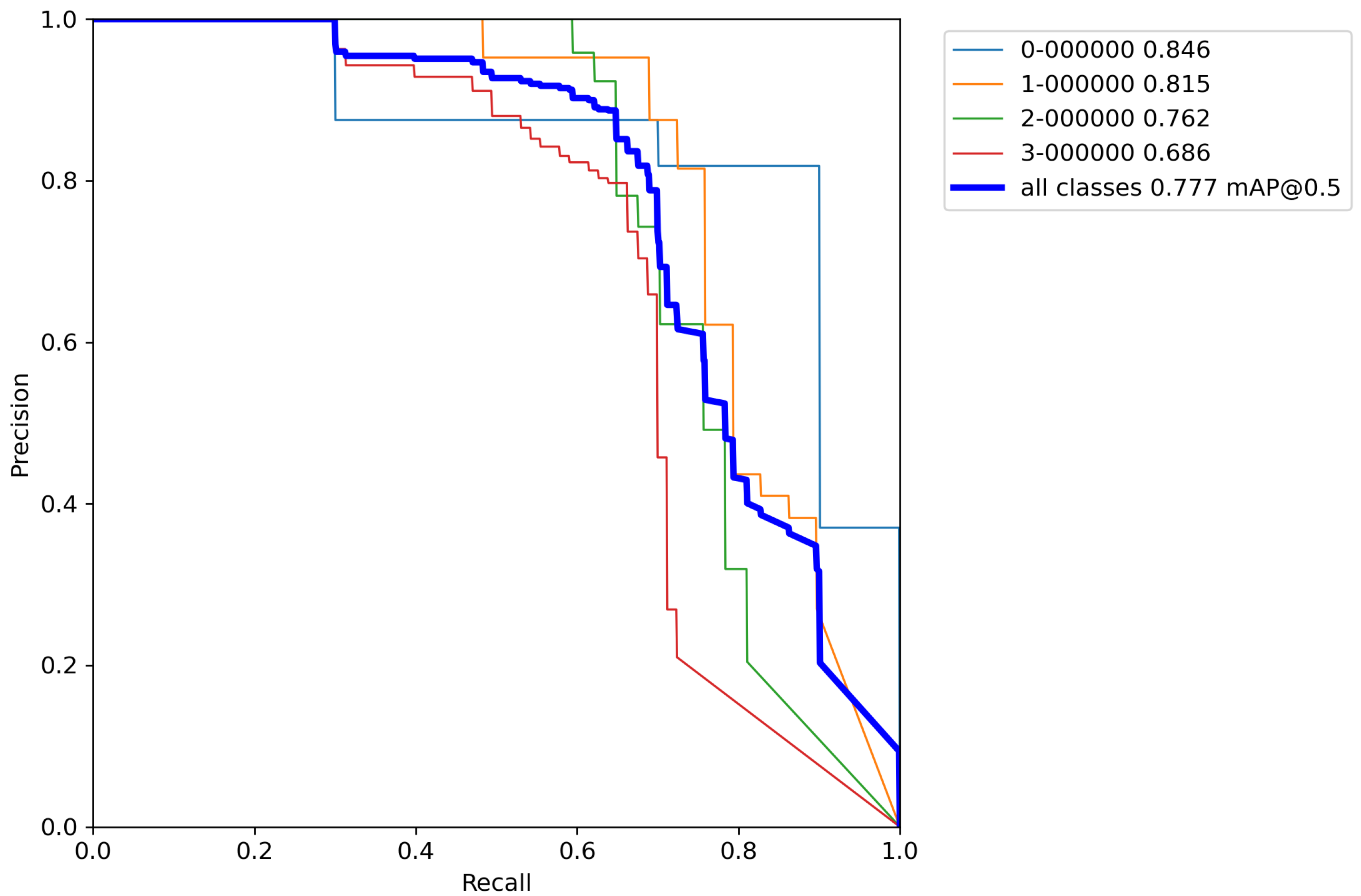
After calculating the average value and standard deviation from all cross-validation experiments performed on a base model with classical augmentation techniques, the evaluation of a model can be seen in Table 10. Moreover, Figure A11, Figure A12, Figure A13, Figure A14 and Figure A15 contain P–R curves of the model trained using the proposed augmentation pipeline.
4. Discussion
From Table 6 it can be seen that the base model after performing cross-validation scores the mean average accuracy value of mAP = 28.4%, which is low accuracy due to the extremely small number of images for training the model. This is why augmentation techniques were used on the training data set. Due to the relatively poor accuracy of the base model, classic augmentation methods were used and tested.
By using classical methods of augmentation over images in the training set and performing cross-validation, Table 8 shows that there is an increase in the accuracy of the model by 2.5% versus the base model. Unfortunately, there is no drastic increase in precision and the obtained results are still unsatisfactory. The reason for this is still the relatively small number of images for training a model with such a large number of parameters. Although the number of images in the training set has been artificially increased by a factor of 8, it is still an insufficient number to successfully train the model. More than 1500 images per object and more than 10,000 total labeled objects per class are needed for successful model training [38]. Since in this case most of the images contain all the objects, for successful training it is enough to artificially increase the number of images to approximate that number. Unfortunately, using classic augmentation techniques, the number of images can be artificially increased only up to a certain limit (it can be increased by a factor of how many techniques are used). Another problem stems from the fact that the Magellan data set has an extremely small number of images (134 in total), and depending on the data set division, the model can be trained well. When dividing the data set, care had to be taken to take enough images for validation and testing to cover a large number of real-world cases, while also allowing a large enough number of images to train the model. For this reason, a more advanced data augmentation technique was used, such as implementing of the above-described augmentation pipeline.
By comparing the results from Table 6, Table 8, and Table 10, it can be observed that the accuracy of the proposed model compared to the base model trained by the proposed increased by 55.1% versus the base model, and 52.6% versus the model trained with classical augmentation techniques, which is proof that this is a successful method for model training. Despite all that, the model gave satisfactory results for the detection and classification of volcanoes over SAR imagery on the surface of the planet Venus.
Testing the Developed Model
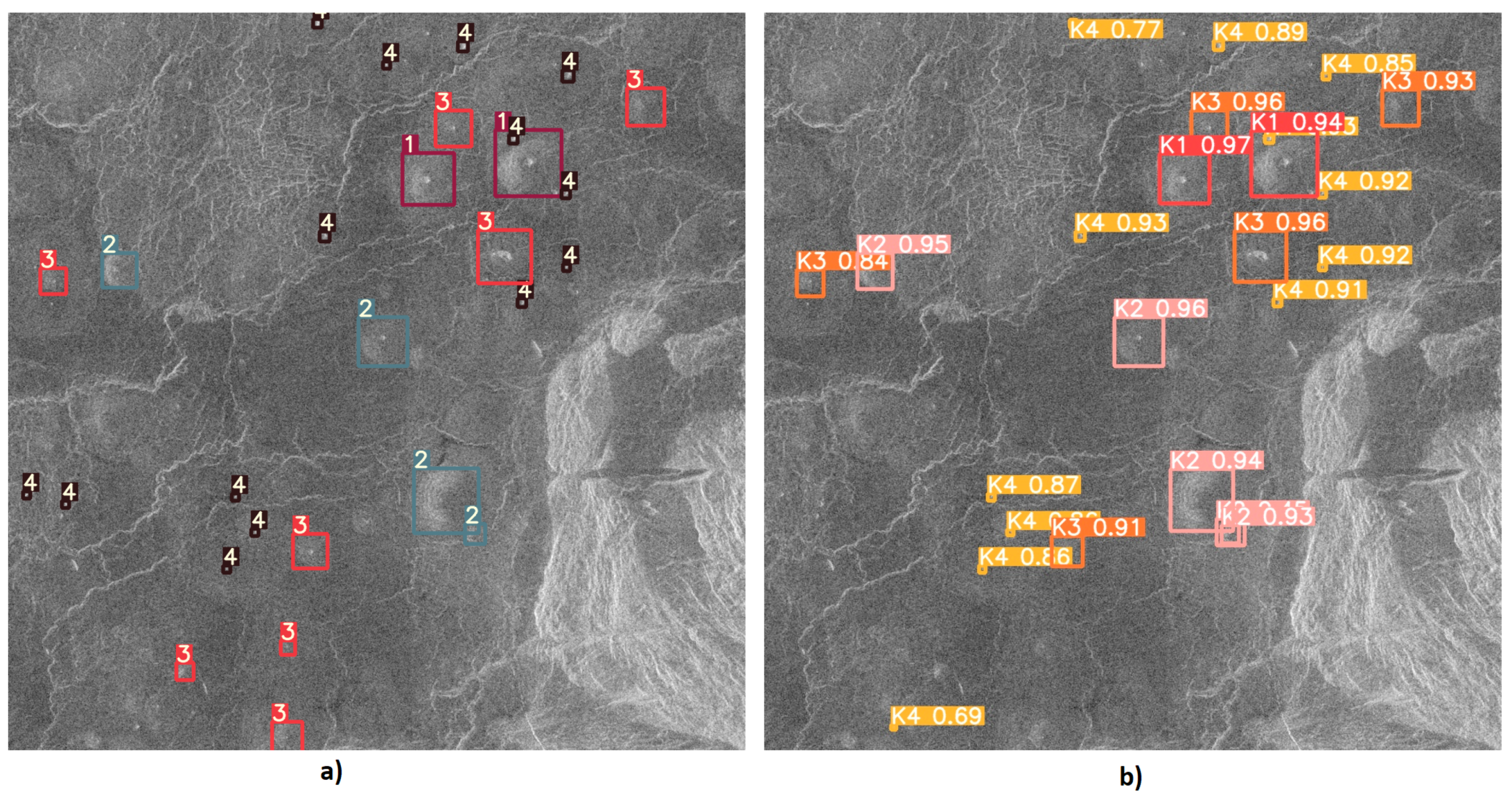
After training the YOLOv5l6 model using the methods described in the previous subsections, the weights that give the best results on testing were downloaded and tested. The detection results of the YOLOv5l6 model are shown in Figure 17, Figure 18 and Figure 19. From Figure 17, it can be noticed how the correct detection of the classification of most objects occurs correctly.
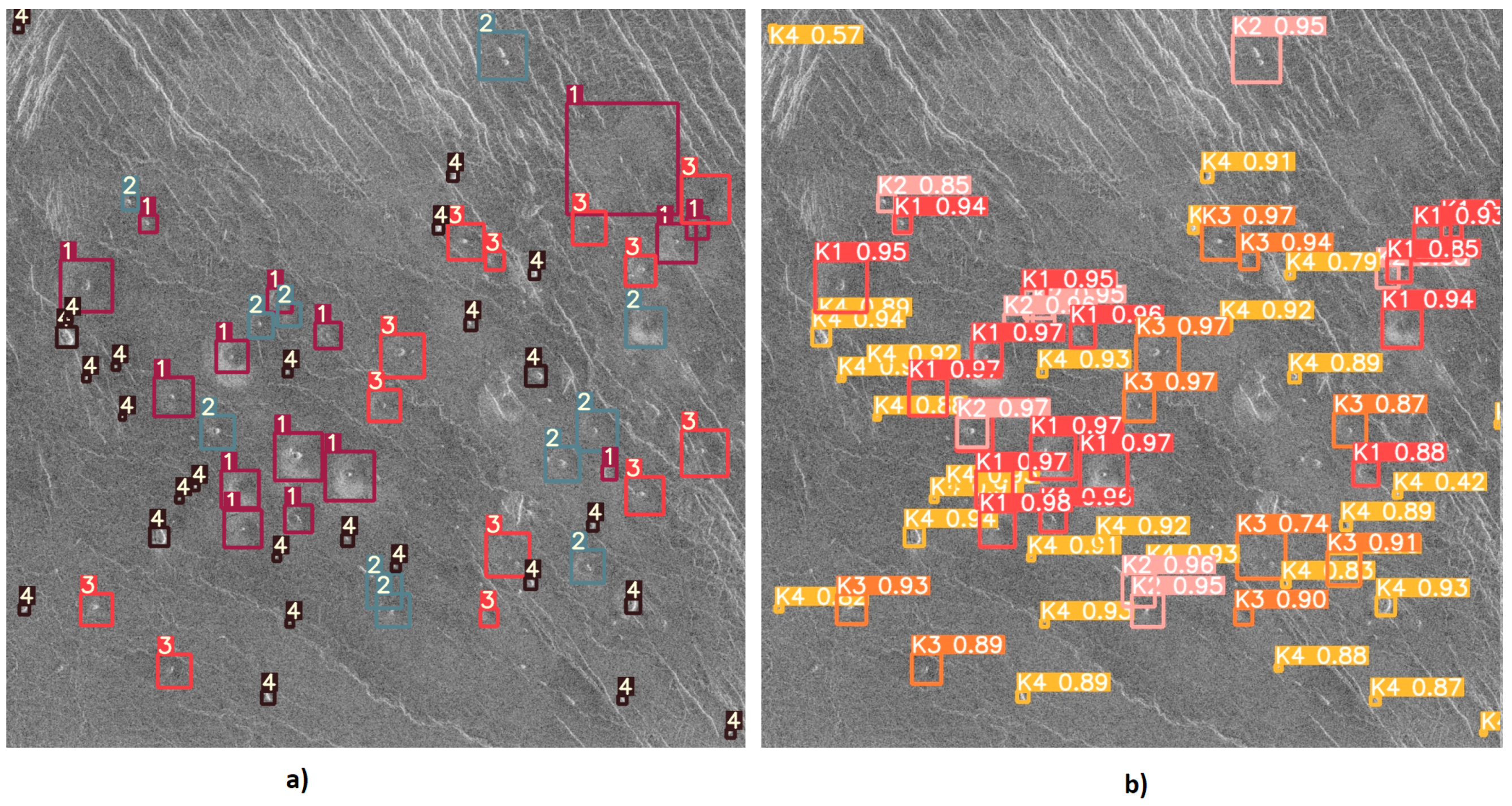
From Figure 18 it can be noticed that the YOLO algorithm has a problem with the detection and classification of objects in places where there are many instances of various classes.
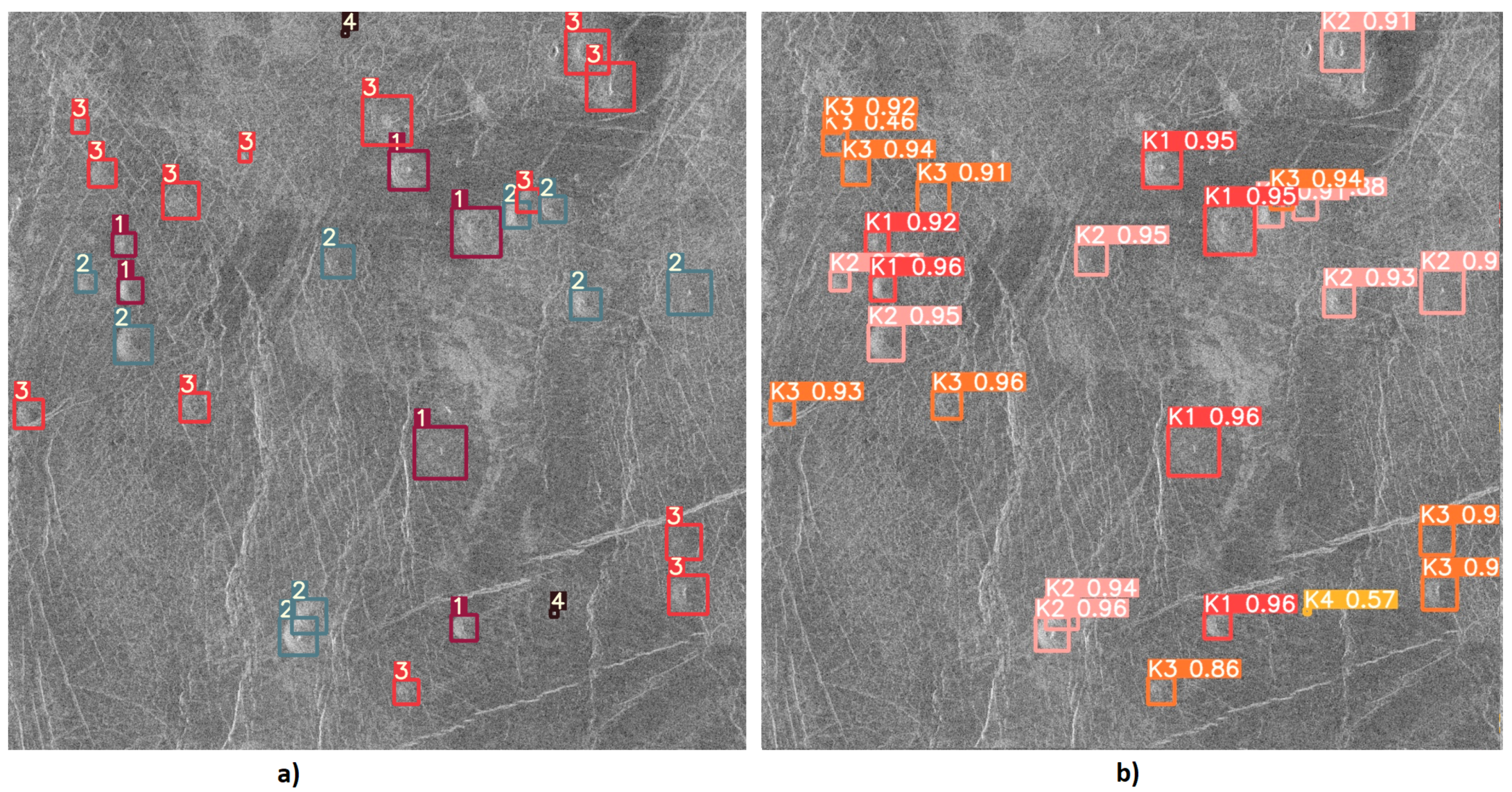
Figure 19 shows one of the cases where class K3 volcanoes were wrongly classified (as class K2) due to their similar characteristics between classes.
From Figure 17, Figure 18 and Figure 19 it can be noticed that the model has successfully detected and classified the majority of volcanoes. Despite everything, the model gave satisfactory results of volcano detection and classification from satellite SAR imagery of the surface of Venus, and it can be concluded that a volcano detection system has been successfully developed and tested.
5. Conclusions
In this paper, a system was developed and tested for the detection and classification of volcanoes from satellite images of the surface of the planet Venus using the YOLOv5 algorithm. For successful model training, it is necessary to have a large number of images and labeled objects in the data set. However, with relatively small data sets such as the Magellan dataset, it is possible to artificially increase the number of images to properly train the model. This is achieved by the joint use of classic data augmentation techniques (e.g., image rotation or mirroring) and more advanced methods (such as mosaic augmentation) in the manner presented in this paper. When performing data augmentation, it is important to take into account which methods are used, because otherwise unwanted features can be introduced into the training data set that result in worse model results. By testing the system on test images, the model gave satisfactory results considering the limitations provided by the dataset itself. Further improvements may be achieved by detailed tuning of hyperparameters. However, that was not the goal of the current article. Furthermore, the next step of research could be to develop an algorithm that divides the image into the dimension grid cell in order to artificially increase image resolution. The goal of the proposed method is to try to increase the precision of the model in the detection and classification of objects of very small dimensions (around 20 × 20 pixels). In conclusion, this developed system performed successful and could find its application in mapping the surfaces of planets for the purposes of scientific research.
Author Contributions
Conceptualization, S.B.Š. and D.Đ.; methodology, Z.C.; software, D.Đ.; validation, S.B.Š., I.L. and Z.C.; formal analysis, I.L.; investigation, D.Đ.; resources, I.L.; data curation, S.B.Š.; writing—original draft preparation, D.Đ.; writing—review and editing, S.B.Š., I.L. and Z.C.; visualization, D.Đ.; supervision, I.L.; project administration, Z.C.; funding acquisition, Z.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
“Magellan dataset” at http://archive.ics.uci.edu/ml/datasets/volcanoes+on+venus+-+jartool+experiment (accessed on 15 January 2022).
Acknowledgments
This research has been (partly) supported by the CEEPUS network CIII-HR-0108, European Regional Development Fund under the grant KK.01.1.1.01.0009 (DATACROSS), project CEKOM under the grant KK.01.2.2.03.0004, Erasmus+ project WICT under the grant 2021-1-HR01-KA220-HED-000031177, and the University of Rijeka scientific grants uniri-mladi-technic-22-61, uniri-mladi-technic-22-57, and uniri-tehnic-18-275-1447.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AI | Artificial intelligence |
| YOLO | You Only Look Once |
| CNN | Convolutional neural network |
| mAP | Mean average precision |
| JARTool | JPL adaptive recognition tool |
| PCA | Principal components analysis |
| FOA | Focus of attention |
| RCNN | Region-based convolutional neural network |
| SAR | Synthetic-aperture radar |
| TP | True positive |
| FP | False positive |
| FN | False negative |
| P | Precision |
| R | Recall |
| IoU | Intersection over union |
| PR Curve | Precision–Recall curve |
| AP | Average Precision |
| KCV | K-fold cross-validation |
Appendix A
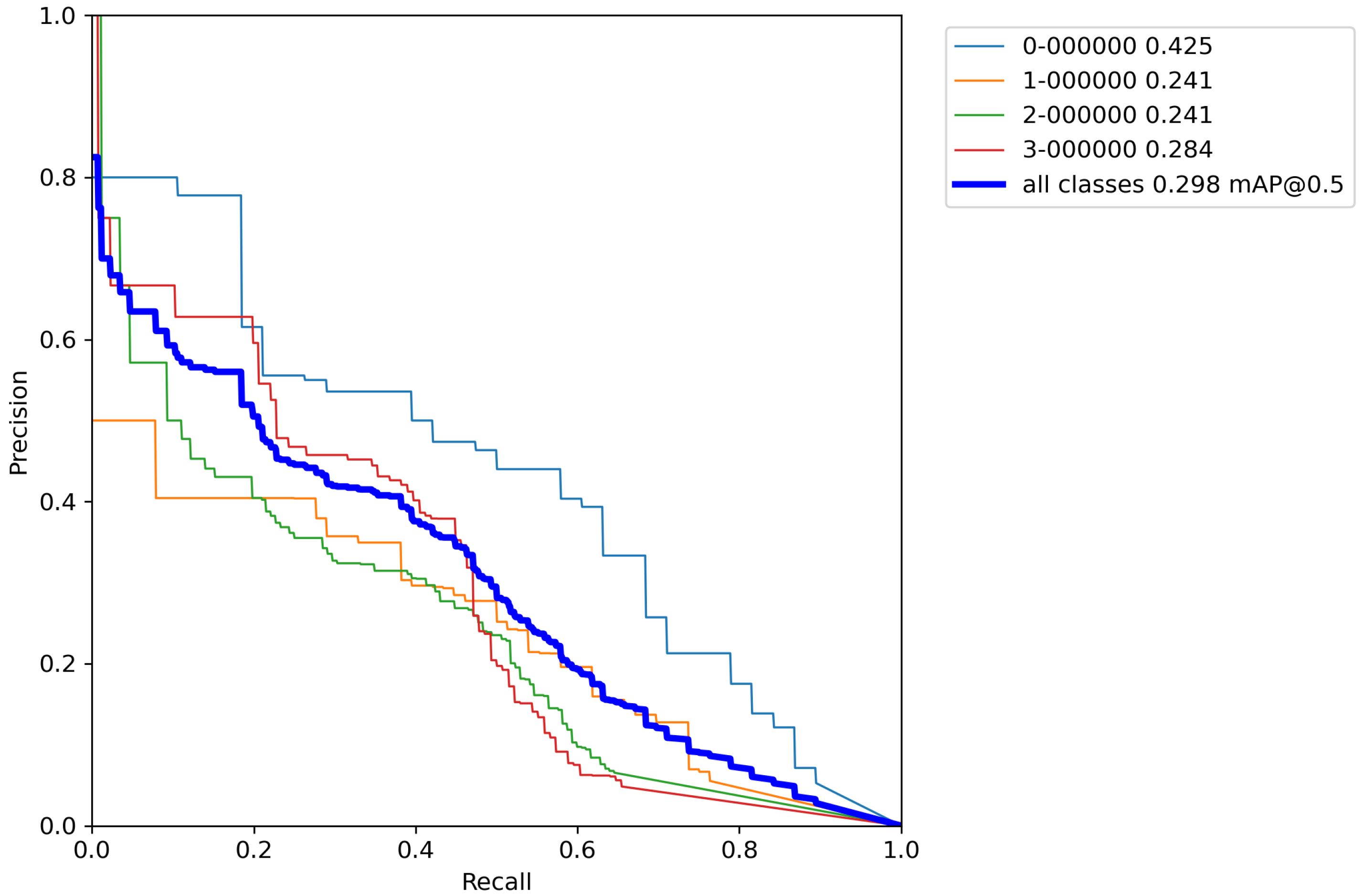
In this Appendix, the P–R curves of the base model are shown. Each subsection represents the single P–R curve of each conducted cross-validation experiment.
Figure A1.
Base model P–R curve—Experiment 1.

Figure A2.
Base model P–R curve—Experiment 2.

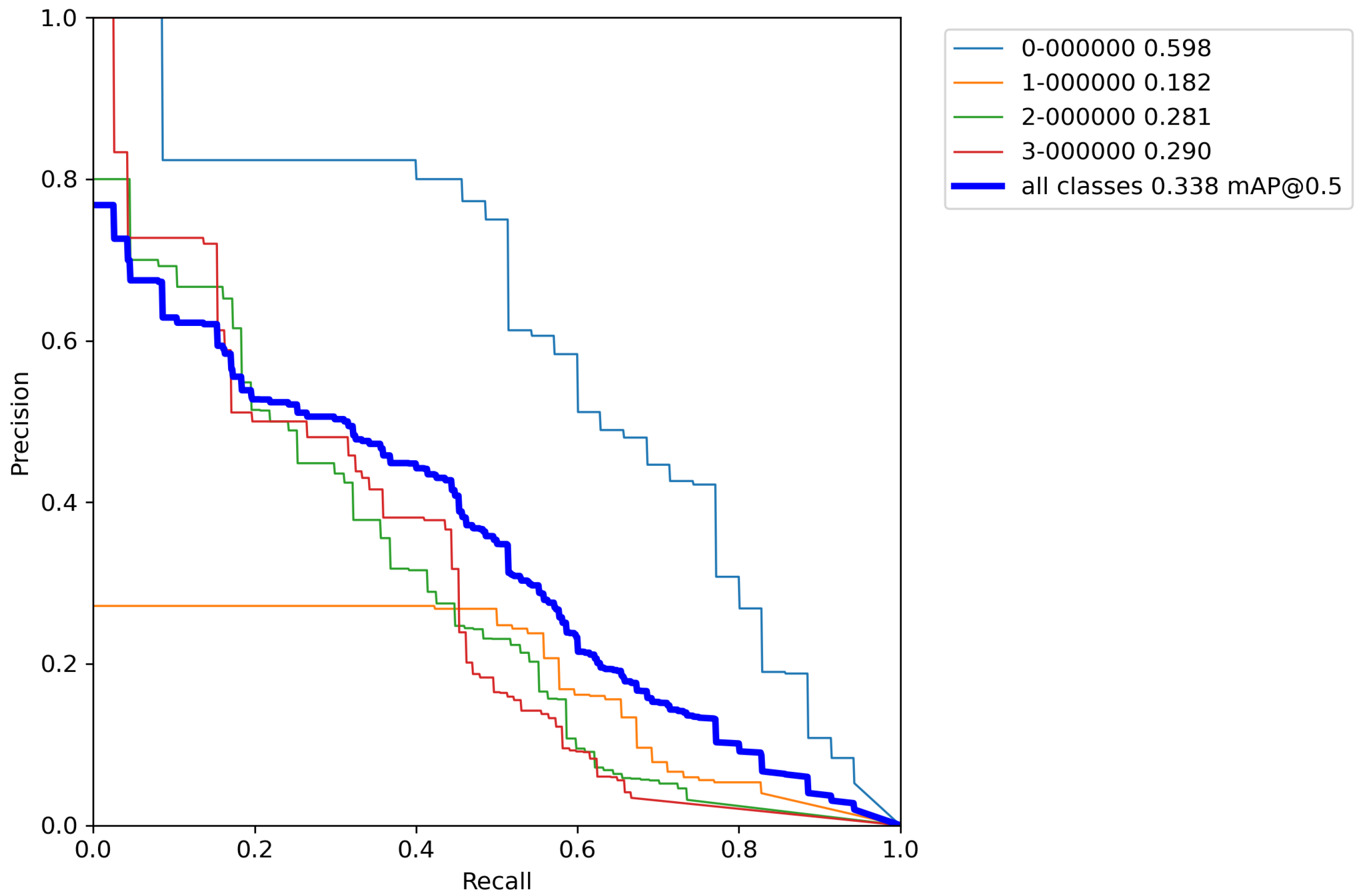
Figure A3.
Base model P–R curve—Experiment 3.

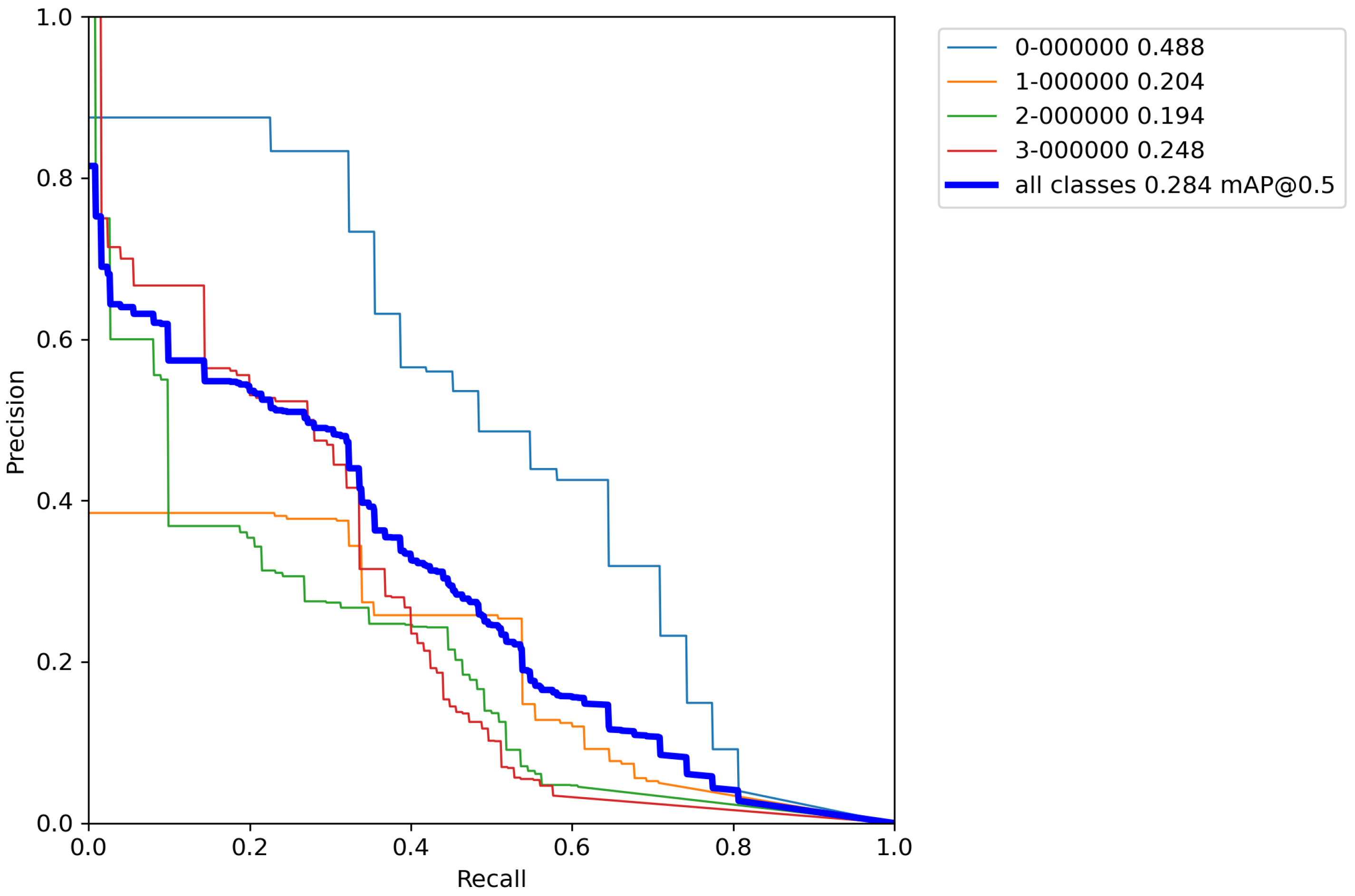
Figure A4.
Base model P–R curve—Experiment 4.

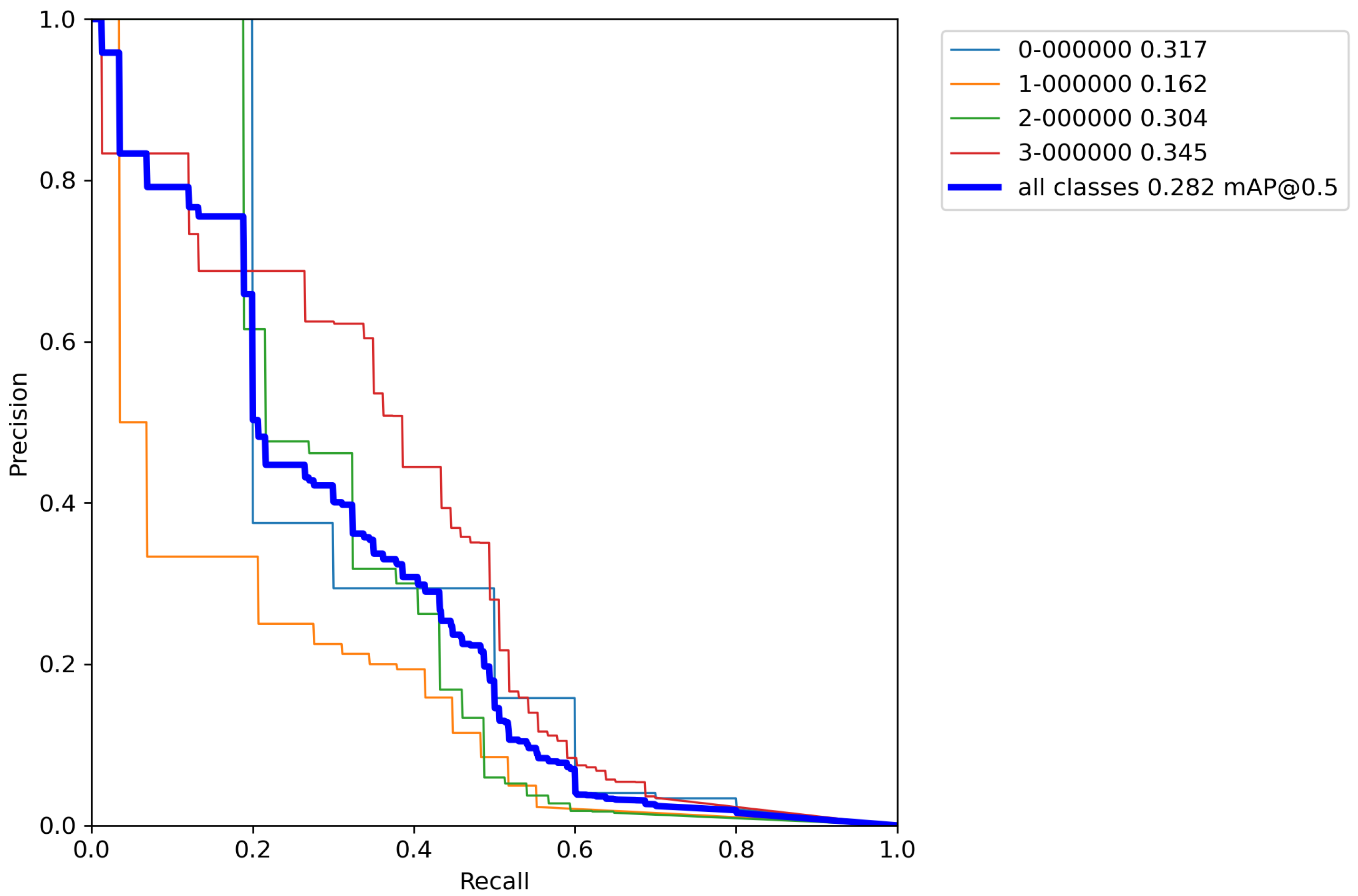
Figure A5.
Base model P–R curve—Experiment 5.

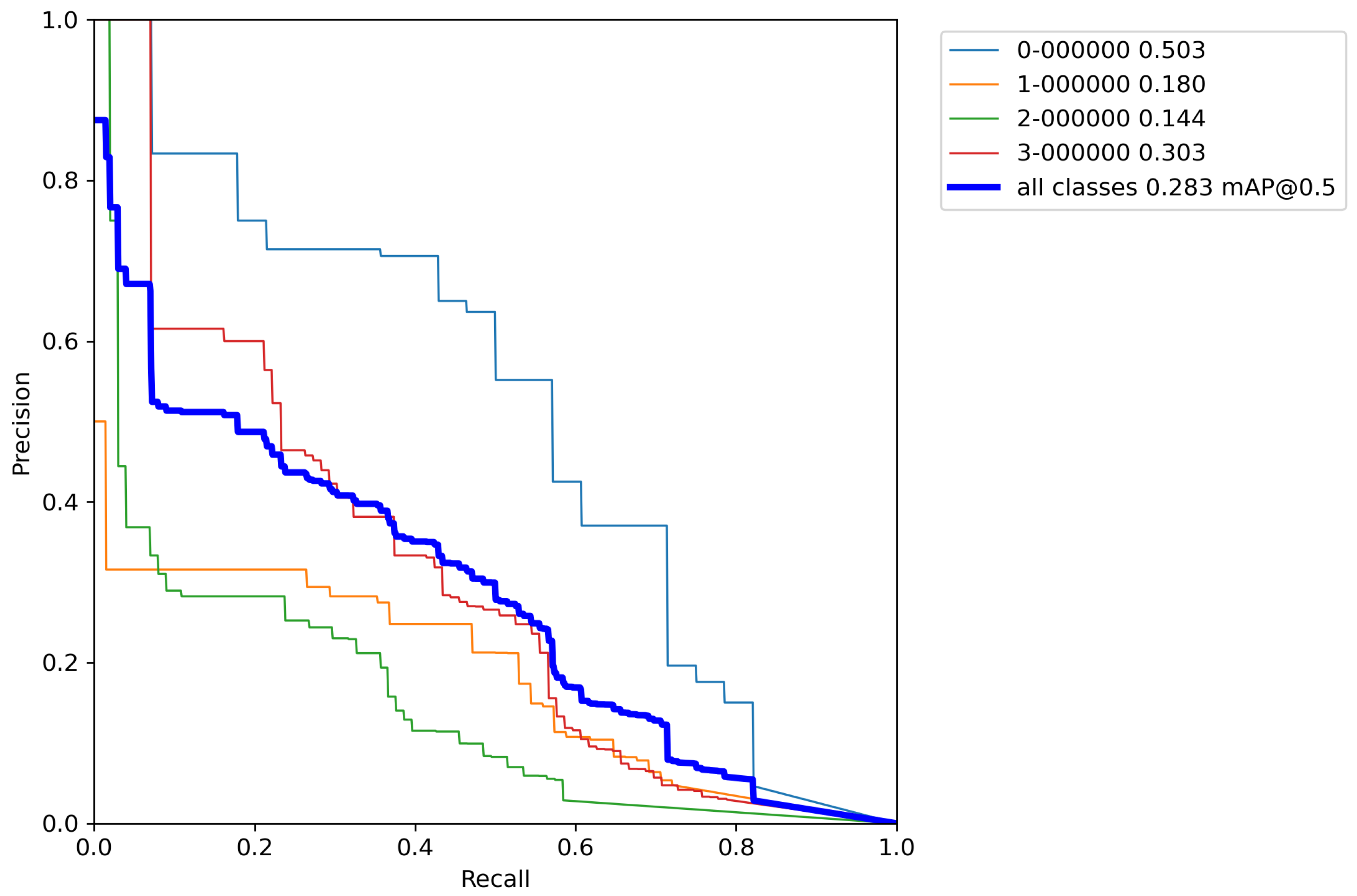
Appendix B
In this Appendix, the P–R curves of the model trained using classical augmentation techniques are shown. Each subsection represents the single P–R curve of each conducted cross-validation experiment.
Figure A6.
Model trained with classic augmentation techniques P–R curve—Experiment 1.

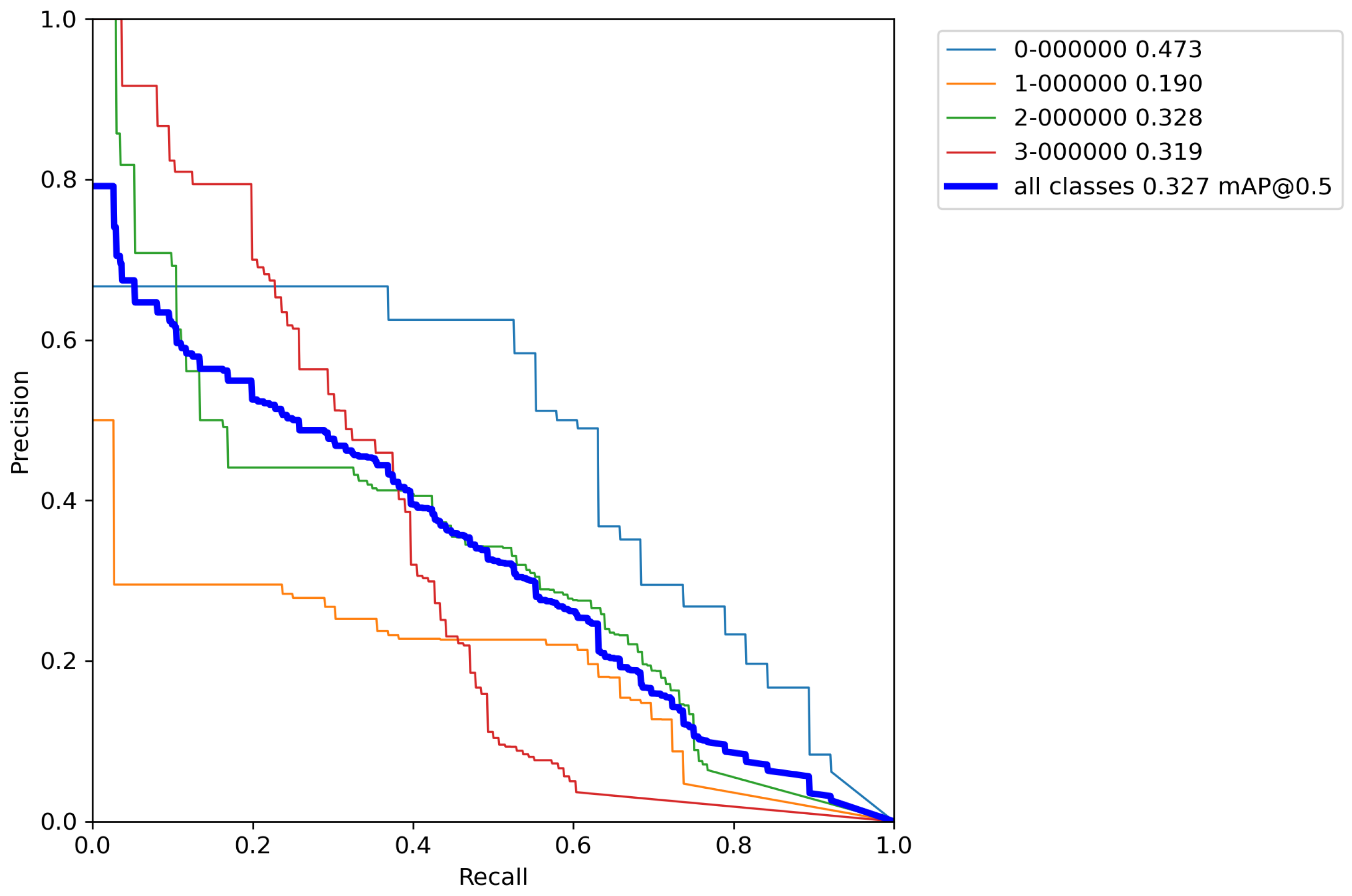
Figure A7.
Model trained with classic augmentation techniques P–R curve—Experiment 2.

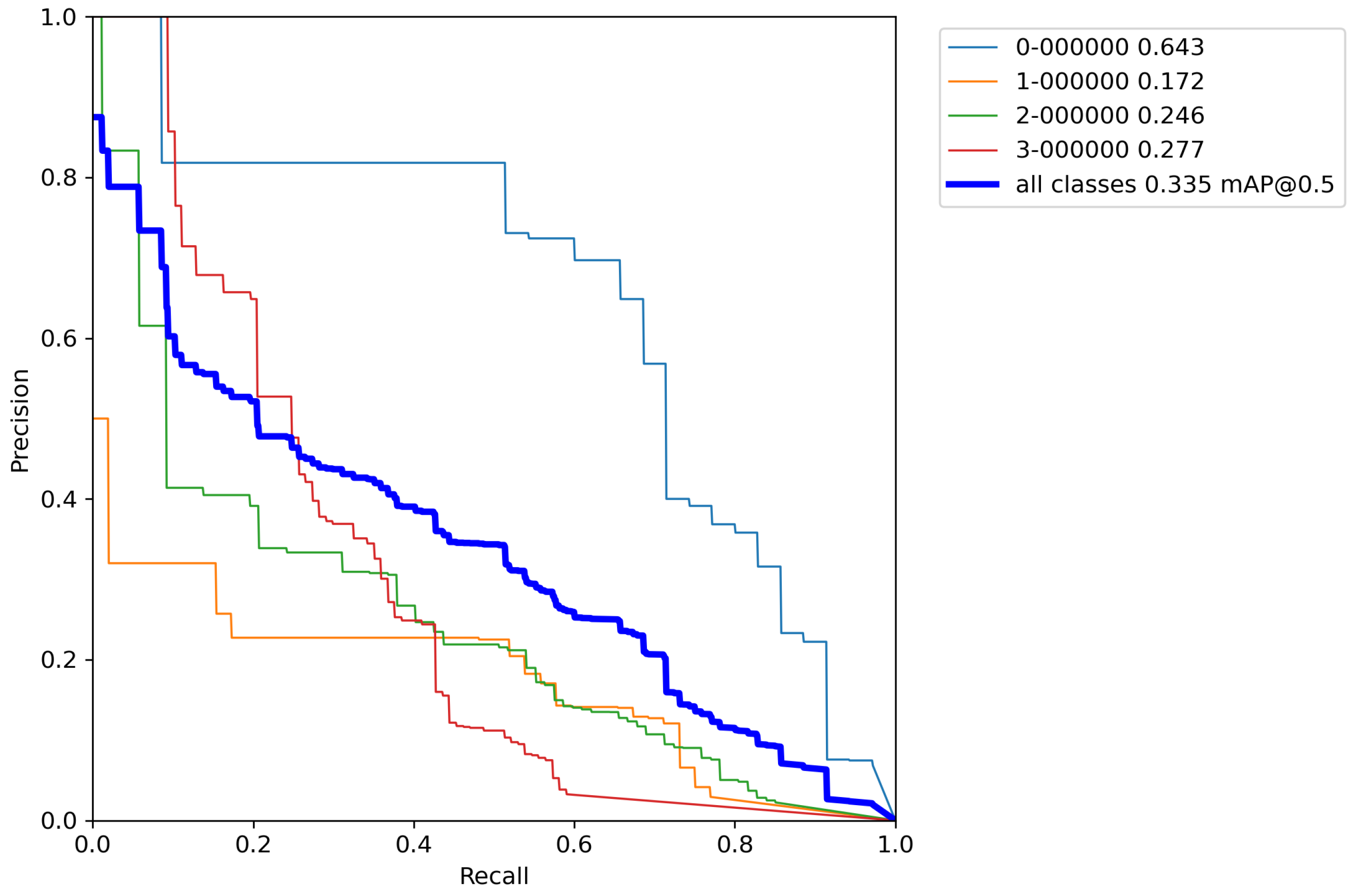
Figure A8.
Model trained with classic augmentation techniques P–R curve—Experiment 3.

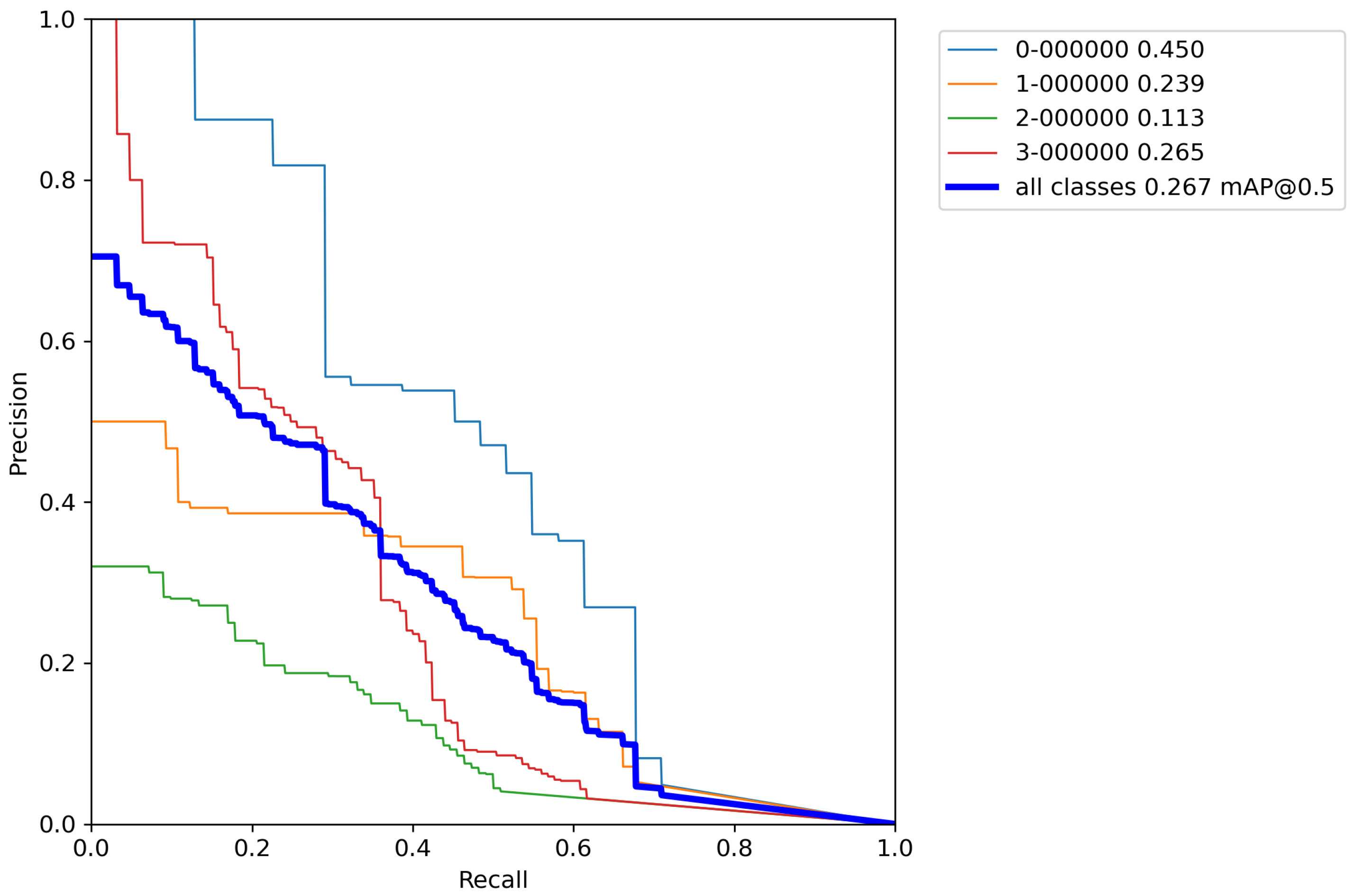
Figure A9.
Model trained with classic augmentation techniques P–R curve—Experiment 4.

Figure A10.
Model trained with classic augmentation techniques P–R curve—Experiment 5.

Appendix C
In this Appendix, the P–R curves of the model trained using the proposed augmentation pipeline technique are shown. Each subsection represents the single P–R curve of each conducted cross-validation experiment.
Figure A11.
Model trained with augmentation pipeline P–R curve—Experiment 1.

Figure A12.
Model trained with augmentation pipeline P–R curve—Experiment 2.

Figure A13.
Model trained with augmentation pipeline P–R curve—Experiment 3.

Figure A14.
Model trained with augmentation pipeline P–R curve—Experiment 4.

Figure A15.
Model trained with augmentation pipeline P–R curve—Experiment 5.

References
- Agarwal, N.; Chiang, C.W.; Sharma, A. A Study on Computer Vision Techniques for Self-driving Cars. Front. Comput. 2019, 629–634. [Google Scholar] [CrossRef]
- Bi, W.L.; Hosny, A.; Schabath, M.B.; Giger, M.L.; Birkbak, N.J.; Mehrtash, A.; Allison, T.; Arnaout, O.; Abbosh, C.; Dunn, I.F.; et al. Artificial intelligence in cancer imaging: Clinical challenges and applications. ACS J. 2019, 69, 127–157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kent, S.M. Sloan digital sky survey. Astrophys. Space Sci. 1994, 217, 27–30. [Google Scholar] [CrossRef]
- Kaiser, N. Pan-STARRS: A wide-field optical survey telescope array. Ground-Based Telesc. SPIE 2004, 5489, 11–22. [Google Scholar]
- Thomas, S.J.; Barr, J.; Callahan, S.; Clements, A.W.; Daruich, F.; Fabrega, J.; Ingraham, P.; Gressler, W.; Munoz, F.; Neill, D.; et al. Rubin Observatory: Telescope and site status. Ground-Based Airborne Telesc. VIII SPIE 2020, 11445, 68–82. [Google Scholar]
- Kremer, J.; Stensbo-Smidt, K.; Gieseke, F.; Pedersen, K.S.; Igel, C. Big Universe, Big Data: Machine Learning and Image Analysis for Astronomy. IEEE Intell. Syst. 2017, 32, 16–22. [Google Scholar] [CrossRef]
- Saunders, R.S.; Spear, A.J.; Allin, P.C.; Austin, R.S.; Berman, A.L.; Chandlee, R.C.; Clark, J.; Decharon, A.V.; De Jong, E.M.; Griffith, D.G.; et al. Magellan mission summary. J. Geophys. Res. Planets 1992, 97, 13067–13090. [Google Scholar] [CrossRef]
- Burl, M.C.; Asker, L.; Smyth, P.; Fayyad, U.; Perona, P.; Crumpler, L.; Aubele, J. Learning to Recognize Volcanoes on Venus. Mach. Learn. 1998, 30, 165–194; [Google Scholar] [CrossRef] [Green Version]
- Venus. Available online: https://volcano.oregonstate.edu/venus (accessed on 23 October 2022).
- Burl, M.C.; Fayyad, U.M.; Perona, P.; Smyth, P.; Burl, M.P. Automating the hunt for volcanoes on Venus. In Proceedings of the 1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 302–309. [Google Scholar] [CrossRef]
- Kumar, B.; Ranjan, R.K.; Husain, A. A Multi-Objective Enhanced Fruit Fly Optimization (MO-EFOA) Framework for Despeckling SAR Images using DTCWT based Local Adaptive Thresholding. Int. J. Remote Sens. 2021, 42, 5493–5514. [Google Scholar] [CrossRef]
- Zhu, X.X.; Montazeri, S.; Ali, M.; Hua, Y.; Wang, Y.; Mou, L.; Shi, Y.; Xu, F.; Bamler, R. Deep Learning Meets SAR: Concepts, models, pitfalls, and perspectives. IEEE Geosci. Remote Sens. Mag. 2021, 9, 5493–5514. [Google Scholar] [CrossRef]
- Parikh, H.; Patel, S.; Patel, V. Classification of SAR and PolSAR images using deep learning: A review. Int. J. Image Data Fusion 2020, 11, 1–32. [Google Scholar] [CrossRef]
- Chen, S.; Wang, H. SAR target recognition based on deep learning. In Proceedings of the International Conference on Data Science and Advanced Analytics (DSAA), Shanghai, China, 30 October–1 November 2014; pp. 541–547. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, L. Geological Disaster Recognition on Optical Remote Sensing Images Using Deep Learning. Procedia Comput. Sci. 2014, 91, 566–575. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Jocher, G. Ultralytics/yolov5: V7.0—YOLOv5 SOTA Realtime Instance Segmentation. Available online: https://zenodo.org/record/7347926#.Y66053bMJPZ (accessed on 23 October 2022).
- Mostafa, T.; Chowdhury, S.J.; Rhaman, M.K.; Alam, M.G.R. Occluded Object Detection for Autonomous Vehicles Employing YOLOv5, YOLOX and Faster R-CNN. In Proceedings of the 2022 IEEE 13th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 12–15 October 2022; pp. 0405–0410. [Google Scholar] [CrossRef]
- Wang, H.; Nie, D.; Zuo, Y.; Tang, L.; Zhang, M. Nonlinear Ship Wake Detection in SAR Images Based on Electromagnetic Scattering Model and YOLOv5. Remote Sens. 2022, 14, 5788. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, X.; Zhang, T. Lite-YOLOv5: A Lightweight Deep Learning Detector for On-Board Ship Detection in Large-Scene Sentinel-1 SAR Images. Remote Sens. 2022, 14, 1018. [Google Scholar] [CrossRef]
- Yoshida, T.; Ouchi, K. Detection of Ships Cruising in the Azimuth Direction Using Spotlight SAR Images with a Deep Learning Method. Remote Sens. 2022, 14, 4691. [Google Scholar] [CrossRef]
- Adedeji, O.; Owoade, P.; Ajayi, O.; Arowolo, O. Image Augmentation for Satellite Images. arXiv 2022, arXiv:2207.14580. [Google Scholar]
- Hu, B.; Lei, C.; Wang, D.; Zhang, S.; Chen, Z. A preliminary study on data augmentation of deep learning for image classification. arXiv 2019, arXiv:1906.11887. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Mishra, M.; Jain, V.; Singh, S.K.; Maity, D. Two-stage method based on the you only look once framework and image segmentation for crack detection in concrete structures. Archit. Struct. Constr. 2022, 1–18. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE conference on computer vision and pattern recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Wang, K.; Liew, J.H.; Zou, Y.; Zhou, D.; Feng, J. Panet: Few-shot image semantic segmentation with prototype alignment. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27–28 October 2019; pp. 9197–9206. [Google Scholar]
- Cengil, E.; Çinar, A.; Yildrim, M. A Case Study: Cat-Dog Face Detector Based on YOLOv5. In Proceedings of the 2021 International Conference on Innovation and Intelligence for Informatics, Computing, and Technologies (3ICT), Zallaq, Bahrain, 29–30 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 149–153. [Google Scholar]
- Zhang, P.; Su, W. Statistical inference on recall, precision and average precision under random selection. In Proceedings of the 2012 9th International Conference on Fuzzy Systems and Knowledge Discovery, Chongqing, China, 29–31 May 2021; pp. 1348–1352. [Google Scholar]
- Chicco, D.; Jurman, G. The advantages of the Matthews correlation coefficient (MCC) over F1 score and accuracy in binary classification evaluation. BMC Genom. 2020, 21, 6. [Google Scholar] [CrossRef] [Green Version]
- Rezatofighsi, H.; Tsoi, N.; Gwak, J.Y.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Francies, M.L.; Ata, M.M.; Mohamed, M.A. A robust multiclass 3D object recognition based on modern YOLO deep learning algorithms. Concurr. Comput. Pract 2022, 34, e6517. [Google Scholar] [CrossRef]
- Anguita, D.; Ghelardoni, L.; Ghio, A.; Oneto, L.; Ridella, S. The ‘K’in K-fold cross validation. In Proceedings of the 20th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN), Bruges, Belgium, 25–27 April 2012; pp. 441–446. [Google Scholar]
- Rodriguez, J.D.; Perez, A.; Lozano, J.A. Sensitivity analysis of k-fold cross validation in prediction error estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 32, 569–575. [Google Scholar] [CrossRef]
- Khasawneh, N.; Fraiwan, M.; Fraiwan, L. Detection of K-complexes in EEG signals using deep transfer learning and YOLOv3. Clust. Comput. 2022, 1–11. [Google Scholar] [CrossRef]
- Jung, Y. Multiple predicting K-fold cross-validation for model selection. J. Nonparametr. Stat. 2018, 30, 197–215. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Yu, Y.; Zhao, J.; Gong, Q.; Huang, C.; Zheng, G.; Ma, J. Real-Time Underwater Maritime Object Detection in Side-Scan Sonar Images Based on Transformer-YOLOv5. Remote Sens. 2021, 13, 3555. [Google Scholar] [CrossRef]
Figure 1.
The example of a radar signature [8].
Figure 1.
The example of a radar signature [8].

Figure 2.
The reflection of the radar beam from the volcano [8].
Figure 2.
The reflection of the radar beam from the volcano [8].

Figure 3.
Defined volcano classes in the dataset: (a) Category 1, (b) Category 2, (c) Category 3, (d) Category 4 [8].
Figure 3.
Defined volcano classes in the dataset: (a) Category 1, (b) Category 2, (c) Category 3, (d) Category 4 [8].

Figure 4.
Image coordinate system.

Figure 5.
Difference between Magellan (left) and YOLO (right) annotations.

Figure 6.
The method of transferring labels from Magellan format to YOLO format.

Figure 7.
Analysis graph of the Magellan data set.

Figure 8.
Schematic representation of dataset augmentation.

Figure 9.
Examples of standard dataset augmentation techniques.

Figure 10.
Examples of an image with a “black zone” [8].
Figure 10.
Examples of an image with a “black zone” [8].

Figure 11.
Example of an cutout agumentation.

Figure 12.
Schematic representation of augmentation pipeline.

Figure 13.
Concept of mosaic augmentation technique.

Figure 14.
An ilustration on YOLOv5-based object detection.

Figure 15.
YOLOv5 structure.

Figure 16.
Illustration of a cross-validation procedure.

Figure 17.
Input and output image used for testing the model-1: (a) Input image with given objects for detection. (b) Output image with detected objects.
Figure 17.
Input and output image used for testing the model-1: (a) Input image with given objects for detection. (b) Output image with detected objects.

Figure 18.
Input and output image used for testing the model-2: (a) Input image with given objects for detection. (b) Output image with the detected objects.
Figure 18.
Input and output image used for testing the model-2: (a) Input image with given objects for detection. (b) Output image with the detected objects.

Figure 19.
Input and output image used for testing model-3: (a) Input image with given objects for detection. (b) Output image with the detected object.
Figure 19.
Input and output image used for testing model-3: (a) Input image with given objects for detection. (b) Output image with the detected object.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Amount of data from existing and upcoming telescopes [6].
Table 1.
Amount of data from existing and upcoming telescopes [6].
| Telescope (year) | Data Rate (bytes/night) |
|---|---|
| VLT (1998) | 10 GB |
| SDSS (2000) | 200 GB |
| VISTA (2009) | 315 GB |
| LSST (2019) | 30 TB |
| TMT (2022) | 90 TB |
Table 2.
Example of LXYR anotation file format.
| Class | X Center | Y Center | Radius |
|---|---|---|---|
| 1 | 273 | 720 | 21.3 |
| 2 | 130 | 450 | 50.2 |
| 1 | 423 | 123 | 70.1 |
Table 3.
Example of YOLO annotation file format.
| Class | X Center | Y Center | Width | Height |
|---|---|---|---|---|
| 0 | 0.286 | 0.775 | 0.429 | 0.429 |
| 1 | 0.127 | 0.439 | 0.098 | 0.098 |
| 0 | 0.413 | 0.120 | 0.137 | 0.137 |
Table 4.
YOLOv5 hyperparameters.
| Hyperparameter | Value |
|---|---|
| Number of iterations | 100 |
| Optimizer | SGD |
| Input image resolution | 1536 × 1536 pixels |
| Batch size | 8 |
| lr0 | 0.01 |
| lr1 | 0.01 |
| momentum | 0.937 |
| weight_decay | 0.0005 |
| warmup_epochs | 3.0 |
| warmup_momentum | 0.8 |
| warmup_bias_lr | 0.1 |
| box | 0.05 |
| cls | 0.5 |
| cls | 1.0 |
| obj | 1.0 |
| obj | 1.0 |
| iou | 0.2 |
| anchor | 4.0 |
| fl | 0.0 |
| hsv | 0.015 |
| hsv | 0.7 |
| hsv | 0.4 |
| degrees | 0.0 |
| translate | 0.1 |
| scale | 0.5 |
| shear | 0.0 |
| perspective | 0.0 |
| flipud | 0.0 |
| fliplr | 0.5 |
| mosaic | 1.0 |
| mixup | 0.0 |
| copy_paste | 0.0 |
Table 5.
Cross-validation results of a base model.
| Metric | Experiment 1 | Experiment 2 | Experiment 3 | Experiment 4 | Experiment 5 |
|---|---|---|---|---|---|
| K1 Precision | 0.496 | 0.455 | 0.581 | 0.455 | 0.272 |
| K1 Recall | 0.493 | 0.483 | 0.600 | 0.483 | 0.500 |
| K1 [email protected] | 0.421 | 0.425 | 0.598 | 0.488 | 0.317 |
| K2 Precision | 0.252 | 0.294 | 0.249 | 0.294 | 0.232 |
| K2 Recall | 0.265 | 0.421 | 0.500 | 0.421 | 0.241 |
| K2 [email protected] | 0.151 | 0.241 | 0.182 | 0.204 | 0.162 |
| K3 Precision | 0.19 | 0.289 | 0.230 | 0.289 | 0.309 |
| K3 Recall | 0.267 | 0.430 | 0.490 | 0.430 | 0.324 |
| K3 [email protected] | 0.107 | 0.241 | 0.281 | 0.194 | 0.304 |
| K4 Precision | 0.231 | 0.348 | 0.364 | 0.348 | 0.364 |
| K4 Recall | 0.505 | 0.456 | 0.444 | 0.456 | 0.446 |
| K4 [email protected] | 0.251 | 0.284 | 0.290 | 0.248 | 0.345 |
| Precision (all) | 0.292 | 0.346 | 0.356 | 0.346 | 0.294 |
| Recall (all) | 0.382 | 0.448 | 0.509 | 0.448 | 0.378 |
| [email protected] (all) | 0.233 | 0.298 | 0.338 | 0.284 | 0.282 |
| F1-Score (all) | 0.320 | 0.390 | 0.410 | 0.360 | 0.330 |
Table 6.
Base model evaluation scores.
| Metric | Average Value | Standard Deviaton |
|---|---|---|
| K1 Precision | 0.457 | 0.101 |
| K1 Recall | 0.524 | 0.043 |
| K1 [email protected] | 0.449 | 0.092 |
| K2 Precision | 0.260 | 0.021 |
| K2 Recall | 0.356 | 0.09 |
| K2 [email protected] | 0.188 | 0.032 |
| K3 Precision | 0.256 | 0.042 |
| K3 Recall | 0.368 | 0.080 |
| K3 [email protected] | 0.225 | 0.070 |
| K4 Precision | 0.316 | 0.054 |
| K4 Recall | 0.449 | 0.036 |
| K4 [email protected] | 0.284 | 0.035 |
| Precision (all) | 0.322 | 0.026 |
| Recall (all) | 0.424 | 0.042 |
| [email protected] (all) | 0.284 | 0.033 |
| F1-Score (all) | 0.362 | 0.034 |
Table 7.
Cross-validation results of a base model + classical augmentation techniques.
| Metric | Experiment 1 | Experiment 2 | Experiment 3 | Experiment 4 | Experiment 5 |
|---|---|---|---|---|---|
| K1 Precision | 0.530 | 0.503 | 0.644 | 0.467 | 0.546 |
| K1 Recall | 0.500 | 0.579 | 0.686 | 0.484 | 0.500 |
| K1 [email protected] | 0.503 | 0.473 | 0.643 | 0.450 | 0.531 |
| K2 Precision | 0.271 | 0.228 | 0.178 | 0.338 | 0.237 |
| K2 Recall | 0.309 | 0.382 | 0.250 | 0.446 | 0.276 |
| K2 [email protected] | 0.180 | 0.190 | 0.172 | 0.239 | 0.194 |
| K3 Precision | 0.228 | 0.412 | 0.305 | 0.257 | 0.352 |
| K3 Recall | 0.313 | 0.355 | 0.308 | 0.143 | 0.338 |
| K3 [email protected] | 0.144 | 0.328 | 0.246 | 0.113 | 0.256 |
| K4 Precision | 0.310 | 0.471 | 0.364 | 0.237 | 0.444 |
| K4 Recall | 0.434 | 0.353 | 0.318 | 0.400 | 0.373 |
| K4 [email protected] | 0.303 | 0.319 | 0.277 | 0.265 | 0.360 |
| Precision (all) | 0.335 | 0.403 | 0.373 | 0.325 | 0.444 |
| Recall (all) | 0.389 | 0.417 | 0.405 | 0.368 | 0.373 |
| [email protected] (all) | 0.283 | 0.327 | 0.335 | 0.267 | 0.335 |
| F1-Score (all) | 0.360 | 0.410 | 0.390 | 0.340 | 0.410 |
Table 8.
Base model + classical augmentation techniques evaluation scores.
| Metric | Average Value | Standard Deviaton |
|---|---|---|
| K1 Precision | 0.538 | 0.059 |
| K1 Recall | 0.549 | 0.076 |
| K1 [email protected] | 0.520 | 0.067 |
| K2 Precision | 0.250 | 0.055 |
| K2 Recall | 0.333 | 0.072 |
| K2 [email protected] | 0.195 | 0.023 |
| K3 Precision | 0.311 | 0.065 |
| K3 Recall | 0.306 | 0.084 |
| K3 [email protected] | 0.217 | 0.078 |
| K4 Precision | 0.375 | 0.072 |
| K4 Recall | 0.376 | 0.039 |
| K4 [email protected] | 0.305 | 0.033 |
| Precision (all) | 0.376 | 0.044 |
| Recall (all) | 0.390 | 0.018 |
| [email protected] (all) | 0.309 | 0.028 |
| F1-Score (all) | 0.362 | 0.034 |
Table 9.
Cross-validation results of a base model + augmentation pipeline.
| Metric | Experiment 1 | Experiment 2 | Experiment 3 | Experiment 4 | Experiment 5 |
|---|---|---|---|---|---|
| K1 Precision | 0.916 | 0.863 | 0.880 | 0.948 | 0.770 |
| K1 Recall | 0.857 | 0.895 | 0.886 | 0.871 | 0.900 |
| K1 [email protected] | 0.906 | 0.932 | 0.924 | 0.927 | 0.846 |
| K2 Precision | 0.961 | 0.933 | 0.892 | 0.870 | 0.874 |
| K2 Recall | 0.857 | 0.750 | 0.731 | 0.823 | 0.717 |
| K2 [email protected] | 0.824 | 0.835 | 0.823 | 0.878 | 0.815 |
| K3 Precision | 0.872 | 0.935 | 0.931 | 0.914 | 0.895 |
| K3 Recall | 0.822 | 0.855 | 0.828 | 0.688 | 0.649 |
| K3 [email protected] | 0.873 | 0.900 | 0.886 | 0.792 | 0.762 |
| K4 Precision | 0.892 | 0.928 | 0.885 | 0.907 | 0.847 |
| K4 Recall | 0.778 | 0.757 | 0.590 | 0.728 | 0.554 |
| K4 [email protected] | 0.796 | 0.819 | 0.702 | 0.775 | 0.686 |
| Precision (all) | 0.910 | 0.915 | 0.897 | 0.910 | 0.847 |
| Recall (all) | 0.793 | 0.814 | 0.759 | 0.777 | 0.705 |
| [email protected] (all) | 0.850 | 0.872 | 0.834 | 0.843 | 0.777 |
| F1-Score (all) | 0.850 | 0.86 | 0.820 | 0.840 | 0.760 |
Table 10.
Base model + augmentation pipeline evaluation scores.
| Metric | Average Value | Standard Deviaton |
|---|---|---|
| K1 Precision | 0.974 | 0.06 |
| K1 Recall | 0.882 | 0.015 |
| K1 [email protected] | 0.907 | 0.032 |
| K2 Precision | 0.906 | 0.035 |
| K2 Recall | 0.747 | 0.039 |
| K2 [email protected] | 0.835 | 0.022 |
| K3 Precision | 0.909 | 0.023 |
| K3 Recall | 0.768 | 0.083 |
| K3 [email protected] | 0.842 | 0.055 |
| K4 Precision | 0.891 | 0.026 |
| K4 Recall | 0.681 | 0.009 |
| K4 [email protected] | 0.756 | 0.052 |
| Precision (all) | 0.896 | 0.025 |
| Recall (all) | 0.769 | 0.037 |
| [email protected] (all) | 0.835 | 0.032 |
| F1-Score (all) | 0.826 | 0.036 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Đuranović, D.; Baressi Šegota, S.; Lorencin, I.; Car, Z. Localization and Classification of Venusian Volcanoes Using Image Detection Algorithms. Sensors 2023, 23, 1224. https://doi.org/10.3390/s23031224
AMA Style
Đuranović D, Baressi Šegota S, Lorencin I, Car Z. Localization and Classification of Venusian Volcanoes Using Image Detection Algorithms. Sensors. 2023; 23(3):1224. https://doi.org/10.3390/s23031224
Chicago/Turabian StyleĐuranović, Daniel, Sandi Baressi Šegota, Ivan Lorencin, and Zlatan Car. 2023. "Localization and Classification of Venusian Volcanoes Using Image Detection Algorithms" Sensors 23, no. 3: 1224. https://doi.org/10.3390/s23031224
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.