
Improvement in the Tracking Performance of a Maneuvering Target in the Presence of Clutter
by
 , , and
, , and
Ghawas Ali Shah
1,†,
Sumair Khan
2,
Sufyan Ali Memon
3,
Mohsin Shahzad
1 ,
,
Zahid Mahmood
1 and
Uzair Khan
1,*,† 1
Department of Electrical and Computer Engineering, Abbottabad Campus, COMSATS University Islamabad, Abbottabad 22060, Pakistan
2
Department of Computer Science, Abbottabad Campus, COMSATS University Islamabad, Abbottabad 22060, Pakistan
3
Department Defense System Engineering, Sejong University, Seoul 05006, Korea
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Sensors 2022, 22(20), 7848; https://doi.org/10.3390/s22207848
Submission received: 30 August 2022
/
Revised: 7 October 2022
/
Accepted: 11 October 2022
/
Published: 16 October 2022
(This article belongs to the Special Issue Underwater Target Localization and Depth Estimation Using the Nonlinear Acoustic Signals)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:The proposed work uses fixed lag smoothing on the interactive multiple model-integrated probabilistic data association algorithm (IMM-IPDA) to enhance its performance. This approach makes use of the advantages of the fixed lag smoothing algorithm to track the motion of a maneuvering target while it is surrounded by clutter. The suggested method provides a new mathematical foundation in terms of smoothing for mode probabilities in addition to the target trajectory state and target existence state by including the smoothing advantages. The suggested fixed lag smoothing IMM-IPDA (FLs IMM-IPDA) method’s root mean square error (RMSE), true track rate (TTR), and mode probabilities are compared to those of other recent algorithms in the literature in this study. The results clearly show that the proposed algorithm outperformed the already-known methods in the literature in terms of these above parameters of interest.
Keywords:
IPDA; IMM; IMM-IPDA; fixed lag smoothing; RMSE; TTR; mode probabilities; cluttered environment1. Introduction
Target tracking in the presence of clutter has received much attention in recent times due to proposing improvements in the tracking algorithms. The tracking procedure should incorporate different problems while tracking a moving target in the presence of clutter [1]. Among these problems, tracking a maneuvering target in a highly cluttered environment has received a lot of attention due to its practicality in real tracking environments [2,3,4,5,6,7]. In essence, the target going through a maneuver diverges from the assumption of a constant velocity constraint set for the moving targets in different tracking algorithms [8,9,10,11]. This makes the tracking performance more compromised under difficult tracking conditions such as high clutter density in the tracking environment.
A number of single target non-maneuvering tracking algorithms are available in the literature, which can track a target moving without any maneuver during their movement [12,13,14], but these algorithms do not provide any procedure to track the maneuvering target with accuracy. Some authors have used multi-scan single target tracking algorithms to achieve the tracking accuracy for maneuvering targets [15,16,17,18,19,20], but at the end they have increased the complexity of the algorithm without providing a new mathematical structure for the given problem. Multi-target tracking algorithms are also used in the literature to address the maneuvering target tracking issue. These algorithms are inherently mathematically complex and time consuming [21,22,23,24,25].
The maneuvering targets are tracked more efficiently by using multiple model tracking approaches such as the interacting multiple model (IMM) tracking algorithm. In Ref. [26], the author used a combination of the interacting multiple model (IMM) and modified gain extended Kalman filter to obtain IMM-MGEKF algorithm for improvement in the performance of IMM-based algorithms. In Ref. [27], the author used the IMM–STSRCKF algorithm (which is an extension of the IMM algorithm using the curvature Kalman filter) to track the target that undergoes maneuvering. Multi sensor information is fused and then incorporated in IMM and PDF tracking algorithms for maneuvering target tracking in Ref. [28]. By using multiple models and target existence state information, an interacting multiple model-integrated probabilistic data association IMM-IPDA algorithm is proposed in Ref. [29]. It shows the improvement in the performance of tracking algorithm in terms of target hybrid state.
Smoothing algorithms are used in a number of applications in target tracking algorithms to improve their performance. The smoothing algorithms increase the computational time and tend to offer delays in any tracking algorithm [12]. However with smoothing, a more accurate and reliable picture of the environment can be achieved. The augmented smoothing algorithm improves the RMSE performance of the existing tracking algorithms but has not provided the complete mathematical structure of the algorithm [30,31]. The FLs-IPDA provides a formula to improve both the target trajectory state and target existence state by using all possible existence events [32]. An extension of the same work with more general analogy is explained in Ref. [33]. In Ref. [34], the authors have used the forward-backward prediction model for smoothing, but they have not provided any mathematical framework for smoothed mode probabilities. All these smoothing algorithms have not studied the status of hybrid target state during maneuvering in the presence of clutter.
In this work, a fixed lag smoothing algorithm is devised for the IMM-IPDA algorithm to improve the performance of the IMM-IPDA algorithm in a cluttered environment. The main contributions of proposed study are:
- This work has enhanced the earlier work proposed in Ref. [33] by adding novelty in terms of mathematical modeling for maneuvering target tracking and its fixed lag smoothing;
- Mathematical formulation for the FLs IMM-IPDA in terms of smoothed target trajectory state estimation, smoothed target existence state update, and smoothed mode probabilities;
- Utilization of the fixed lag smoothing algorithm to improve the tracking performance of IMM-IPDA;
- Improvement in the RMSE, TTR, and mode probabilities using the fixed lag smoothing algorithm;
- A complete set of simulations are performed in MATLAB to prove the above contributions.
This paper is divided into different sections to properly describe the principal of proposed work. The target motion model and related concepts are addressed in Section 2. The mathematical model and different derivations are provided in Section 3. In Section 4, complete analyses and a discussion of the results are made. The conclusion is provided at the end to summarize the proposed work.
2. Mathematical Model
In this work, the target is assumed to switch in-between the target existence and non-existence state randomly during its motion. It is assumed that the target follows the Markov chain model for its propagation. The probability of the target existence is defined as
where defines the time interval in-between scan and k. is the average duration of the target existence. is the probability that the target exists at any current scan k conditioned on its existence at scan . The target existence () and its non-existence () are mutually exclusive and exhaustive events. Thus, the total probability sum is 1 at any particular scan.
The target follows the state transition model defined in (3).
where is assumed to be a zero mean white Gaussian noise with known covariance . It represents the uncertainty in the assumed target motion model (3). is defined as
where q is the plant noise parameter, m is the dimension of measurement vector. The matrix becomes dimensional in (4). In (3), is the target trajectory state at scan k and it is defined as
where and are the target position coordinates in Cartesian coordinates, while and are the respective velocity components of the target.
2.1. Measurement Model
The measurements from the target at any scan k are defined as
where is the measurement matrix, is the measurement received at any current scan k, and is the measurement noise, which is assumed to be zero mean white Gaussian noise. Its covariance R is assumed to be
where , are the variance in the x-axis and y-axis, respectively, and are assumed to 5 m in this study equally. In (6), H is defined as
where is the identity matrix of measurement order m and is the matrix of zeroes with dimension m.
2.2. Target Motion Models
In this study, it is assumed that the target performs maneuvering during its motion. Hence, the target will have two possible motion models to form its trajectory. One is the constant velocity model (CV), while the other one is the constant acceleration model (CA). For the CA model, the state trajectory is
The variable represents target position, denotes the velocity of target and represents the acceleration of the target. For the CV model, the acceleration components in the state trajectory (9) becomes 0, and hence the trajectory state vector for the CV model will become the same as given in (5). The CV state transition matrix is
where parameter is a three-dimensional matrix given as
where T is the sampling time. On the other hand, error covariance matrix is
where q denotes the plant noise parameter and is a three-dimensional matrix
The state transition matrix for the CA model is defined as
where the three-dimensional matrix is the state transition matrix and is equal to
For constant acceleration state vector (9), the matrix will have an additional m-dimensional zeros column.
3. Fixed Lag Smoothing IMM IPDA
In this section, a step-by-step approach towards the working of the proposed algorithm is provided. Tracks are initialized using the two-point difference [12] method. By considering the target birth as a random event, this test is repeated at every scan for tracks initialization. At any scan, the target starts with a two point initialization step.
Tracks are initialized at any scan k with target initial augmented trajectory state for the jth model as
and its associated covariance is initialized as
in the subscript denotes the initial state of the target. ’A’ in the superscript is the significance of the augmented state while the j denotes the jth model in progress.
The augmented state transition matrix at any scan k for constant velocity and constant acceleration model are defined as
where is the definition of the state transition matrix defined in (10) and (14) for CV and CA models.
The process noise covariance matrix is
where is the process noise covariance matrix conditioned on (12) and (16).
Track Information Mixing
The mixing step is key to the IMM initialization at any current scan k. For any scan k, it is assumed that the transition probability, which defines the switching from mode (model) to mode (model), is already known. The mode transition probabilities can be modeled in the form of matrix
The selection procedure for the values in (22) is discussed in Ref. [32]. The sum of these mode transition probabilities is always equal to 1.
The mixing steps in IMM algorithm are summarized below:
1: Mixing mode probability
The i and j represents the previous and current scans index, respectively. is the mode probability at scan . is the target motion model at jth scan, while is the target motion model in ith scan. The denominator in (25) is the normalization term.
2: Mixing target trajectory state and error covariance matrix subject to initial conditions
where is target trajectory state estimate at scan conditioned on jth mode. The mixing state error covariance is
where
is state error covariance update at scan for jth model.
3: Prediction Process
With the use of results summarized in (27) and (28), the target trajectory state and its associated error covariance are predicted for the current scan k as
and
4: Update Process
In this step, the mode probability, target trajectory state and its associated error covariance, and the target existence state is updated using each rth measurement information from the measurement vector received at current scan k. The measurement selection is carried out using the following selection criteria
where g is the gating threshold. Its value is selected as the limit on standard deviation. is defined as
The measurements from the measurement set , which satisfies the criteria defined in Equation (32), are selected further for the estimation process.
4.1: Calculation of data association probabilities at the current scan
Each measurement at the current scan is associated with the target of interest and its association probability is calculated for both the null hypothesis (none of the measurement belongs to the target) and the other hypothesis [12].
where implies the null hypothesis and implies the detection hypothesis. is the detection probability and the is the gating probability. The values of these parameters are selected with the assumption that if the target is detected then it is certain that it will lie in the validation gate. is the clutter density. The likelihood function for the measurement conditioned on model is
The is defined as
.
4.2: Mode probability update at current scan
The mode probability at the current scan for jth mode, conditioned on the rth measurement is
where
For the non-detection event , (37) will be defined as
To obtain the updated mode probability for the jth mode at current scan, we have to use (37) for all measurements to the mode hypothesis as
where
4.3: Estimation of the trajectory state and error covariance at the current scan
The target trajectory state estimate at scan k is update conditioned on the rth measurement and jth model as
where
and the Kalman gain at current scan k is
The measurement innovation covariance matrix is defined as
where
The updated trajectory state error covariance matrix is
The target trajectory state update at the current scan conditioned on all models and measurement associations is
where for the and mth model
Other parameters are defined in the above set of equations. The associated state error covariance matrix is calculated as
where
4.4: Target existence state update at the current scan
The target existence state at the current scan k is also updated for the maneuvering target as
where
5: Smoothed State Update
The smoothing of the target trajectory state and target existence state at fixed lag N is carried out in this section. The smoothing principle proposed in Ref. [33] is used here to obtain the smoothed hybrid state at fixed lag N. The authors have used the fixed lag smoothing algorithm on the integrated track splitting filter to obtain the smoothed target trajectory state and target existence state at the same time. In this work, the smoothing principle is carried out for the maneuvering target scenario. In addition to the improvement in the target hybrid state, the mode weights are also smoothed at fixed lag N.
5.1: Augmented Smoothed Target Trajectory State Update
At each time step k, we also obtain the augmented target trajectory state conditioned on jth model as
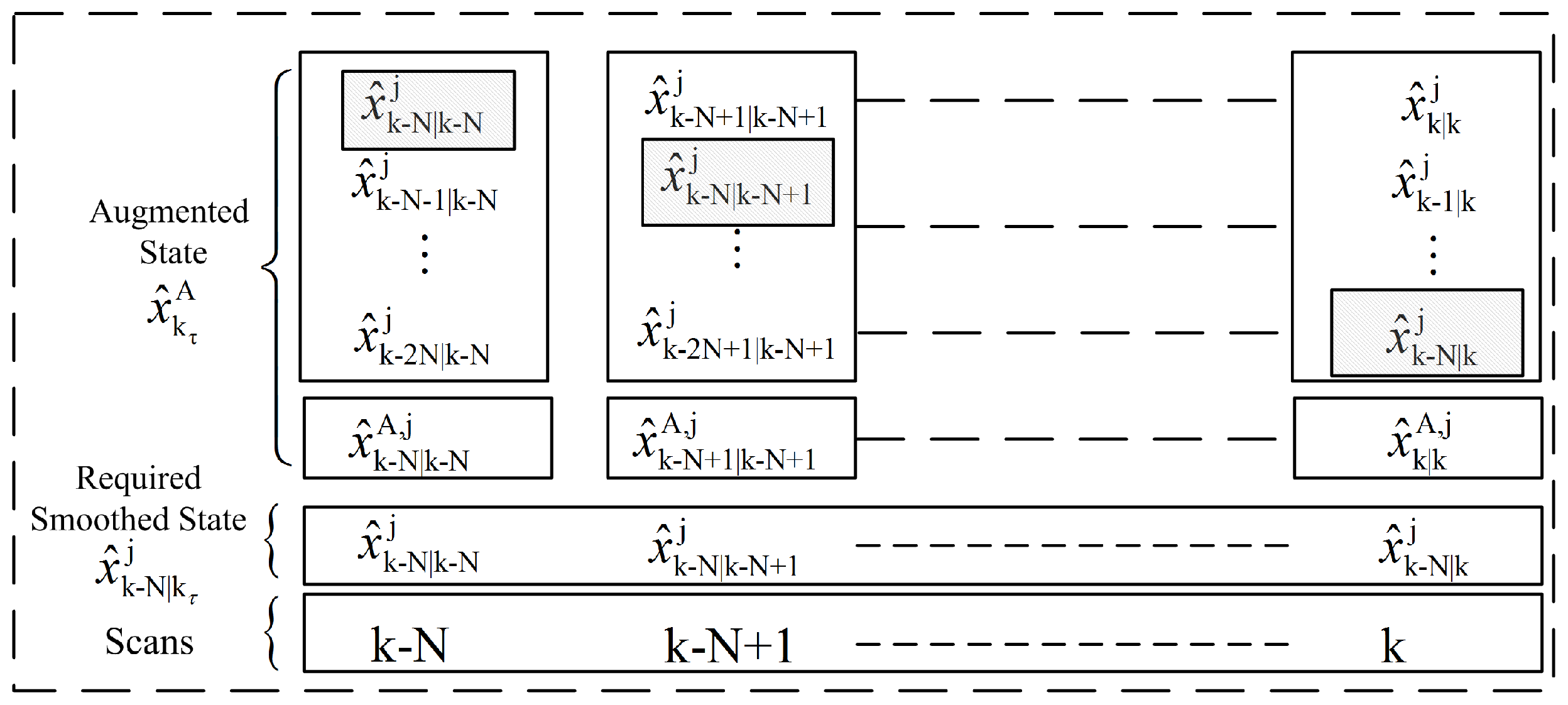
The augmented state Equation (56) also provides the smoothed state vector at lag using the measurement information available until the current scan k. This idea is presented in Figure 1 for a smoothing window of lag size N. At each scan we need to collect the smoothed state , where represents the index in the smoothing window. In Section 5.2, the result of (56) will be used to obtain the smoothed target trajectory state at fixed lag N.
5.2: Smoothed Target Existence State Update
For the smoothed target existence state under maneuvering at fixed lag N, the final results of Ref. [33] are used here. Let be the running index in the smoothing window and is defined as , where . The smoothed target existence state for is
where
For
where
and
5.3: Smoothed Mode Probability Update
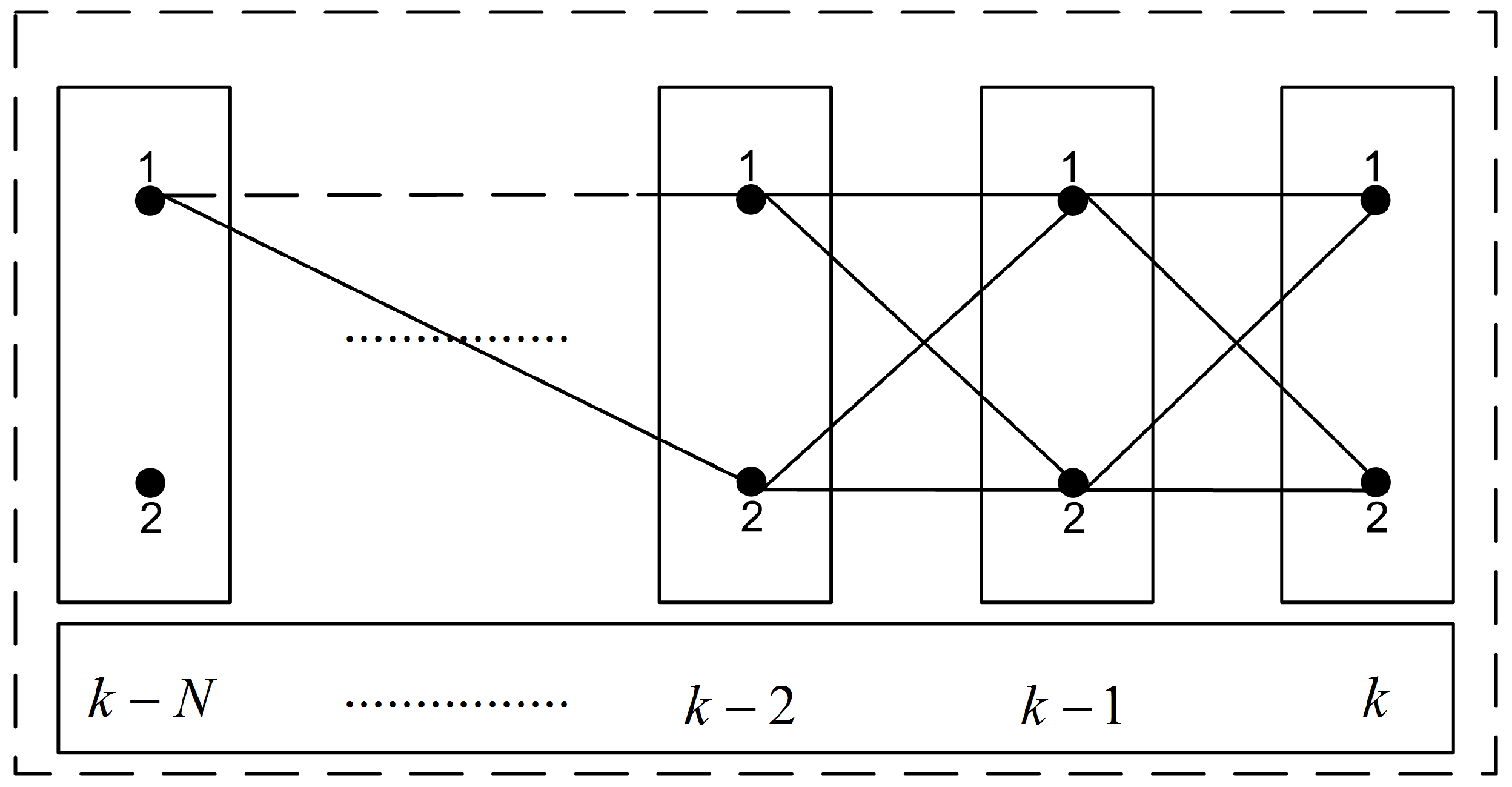
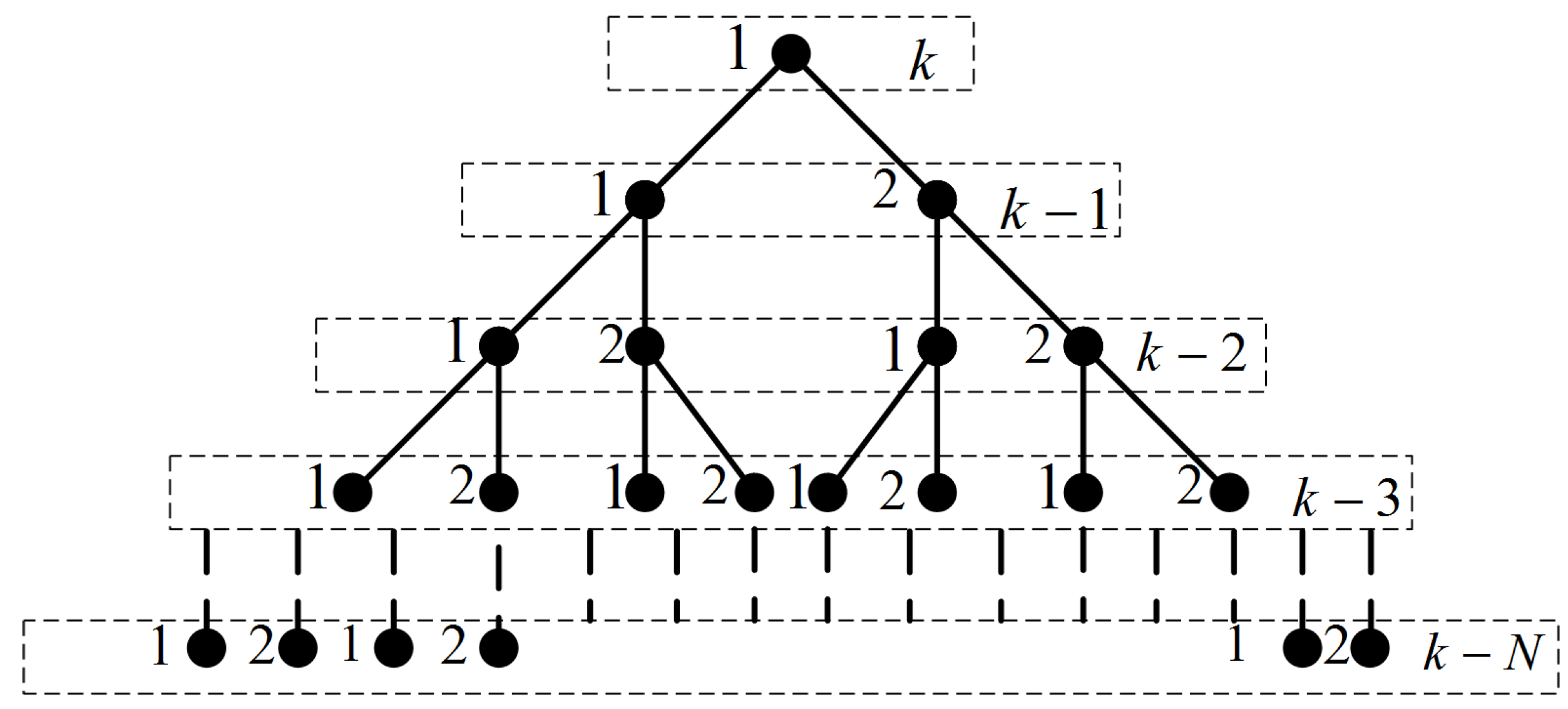
The mode probabilities are also smoothed in the proposed algorithm at fixed lag N. The mode probabilities are smoothed at fixed lag N for each jth model by assuming all possible joint events with respect to the motion models at each scan in the smoothing window. This principle is illustrated in Figure 2, where is observed as a special case. For clarity it is assumed that at scan is to be smoothed. The same procedure will be repeated for any jth model . In Figure 3, a tree diagram is presented for the set of possible hypothesis in a smoothing window of lag size N and . It is presented for any single jth mode (in Figure 3, ) at scan k taken as reference and its backward propagation in the smoothing window until scan is observed. In general, the number of possible joint events from scan k to scan grows as a function .
Here, to begin with, a special case of lag size and number of motion models is considered. Later in the section, the results will be generalized for any lag N and for any number of motion models. The smoothed mode probability for any model at scan is calculated as
The first term on the right side of equality in (62) is defined as
where
where, is defined in (22). is the estimated mode probability of at scan , and it is obtained in (40). Similarly, the next three terms on the right hand side of (62) can be solved, such that the second term becomes
where
The derivations to obtain the results in Equations (65), (68), (71), and (74) are available in Appendix A. Using the Equations (63)–(73) and some previous results in (62) as
where and for are the likelihood ratios conditioned on models for scans and k, as defined in (36). The normalization function in (75), is the consequence of the total probability theorem with reference to both models () under consideration at scan , such that
In general, to obtain the smoothed mode probability for jth mode at fixed lag N using the measurement information till the current scan k, the following set of equations can be used,
where
With the use of (77) and (78), one can find the smoothed mode probability at any past scan at fixed lag N.
5.4: Merged Smoothed Target Trajectory State Update
Each jth model smoothed state is probabilistically weighted and merged to calculate the smoothed target trajectory state at fixed lag N for the jth model. For this purpose, the smoothed target trajectory state at fixed lag N from the augmented state smoothed target trajectory state (56) is used and weighted with the jth smoothed mode at fixed lag N, as calculated in (77), and merged over all the possible modes.
where all parameters are defined in the earlier sections.
4. Simulation Analysis
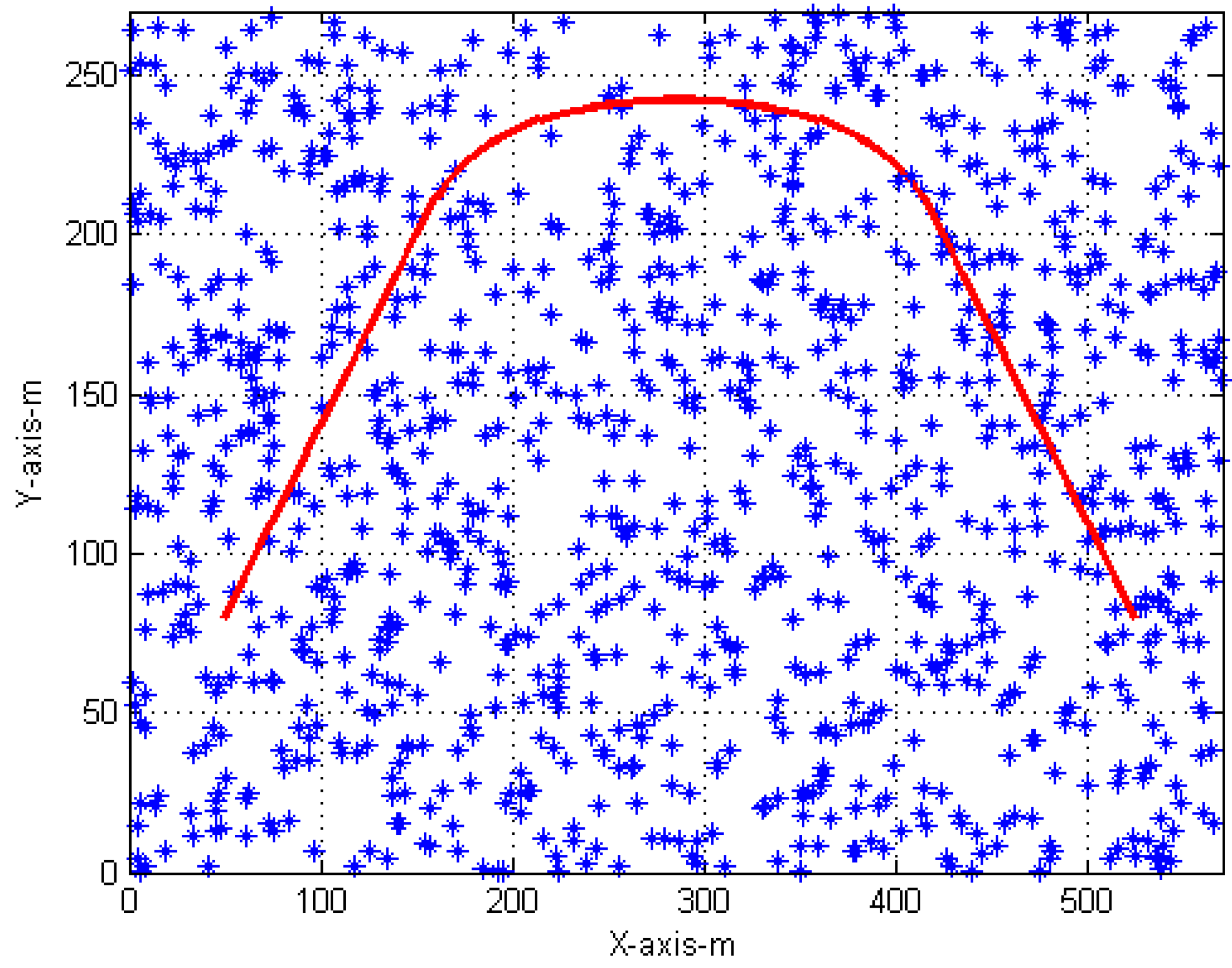
In this section, the performance of proposed algorithm is compared with different tracking algorithms under the same simulation conditions to achieve a fair analysis. A single target under maneuvering is considered in a 2-dimensional surveillance area with a dimension of . The target is assumed to follow two motion models: a CV model and a CA model. During the CV model, the target is assumed to be moving with a velocity of 17 m/s. In the CA model, the target is assumed to have an acceleration of .
As shown in Figure 4, the CV model is followed by the target in two separate scan intervals. The first target is in-between scans 1–21, and the second target is in-between scans 47–67. The CA model is followed by the target in-between scans 22–46. The initial position of the target is for the single target and the target is detected with a detection probability of . The sampling time is 1 s. The total number of scans in a single run is 67 and 500 simulation runs are performed in this analysis. The clutter is uniformly distributed with a density of .
The root mean square error (RMSE), true track rate (TTR), and mode probabilities are presented in this section to compare the performance of the proposed algorithm with the other algorithms available in the literature, which also assumed the target existence state as an event [12].
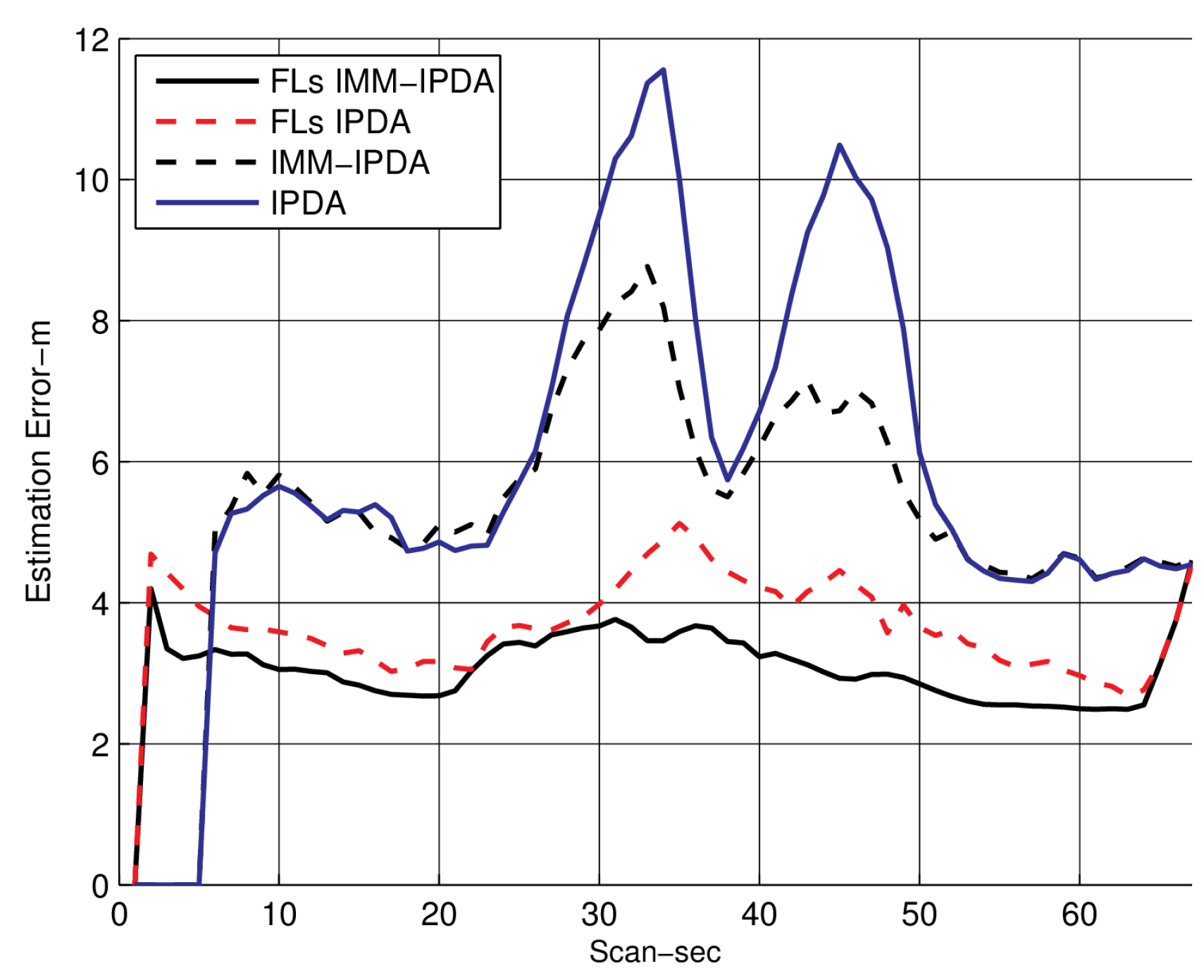
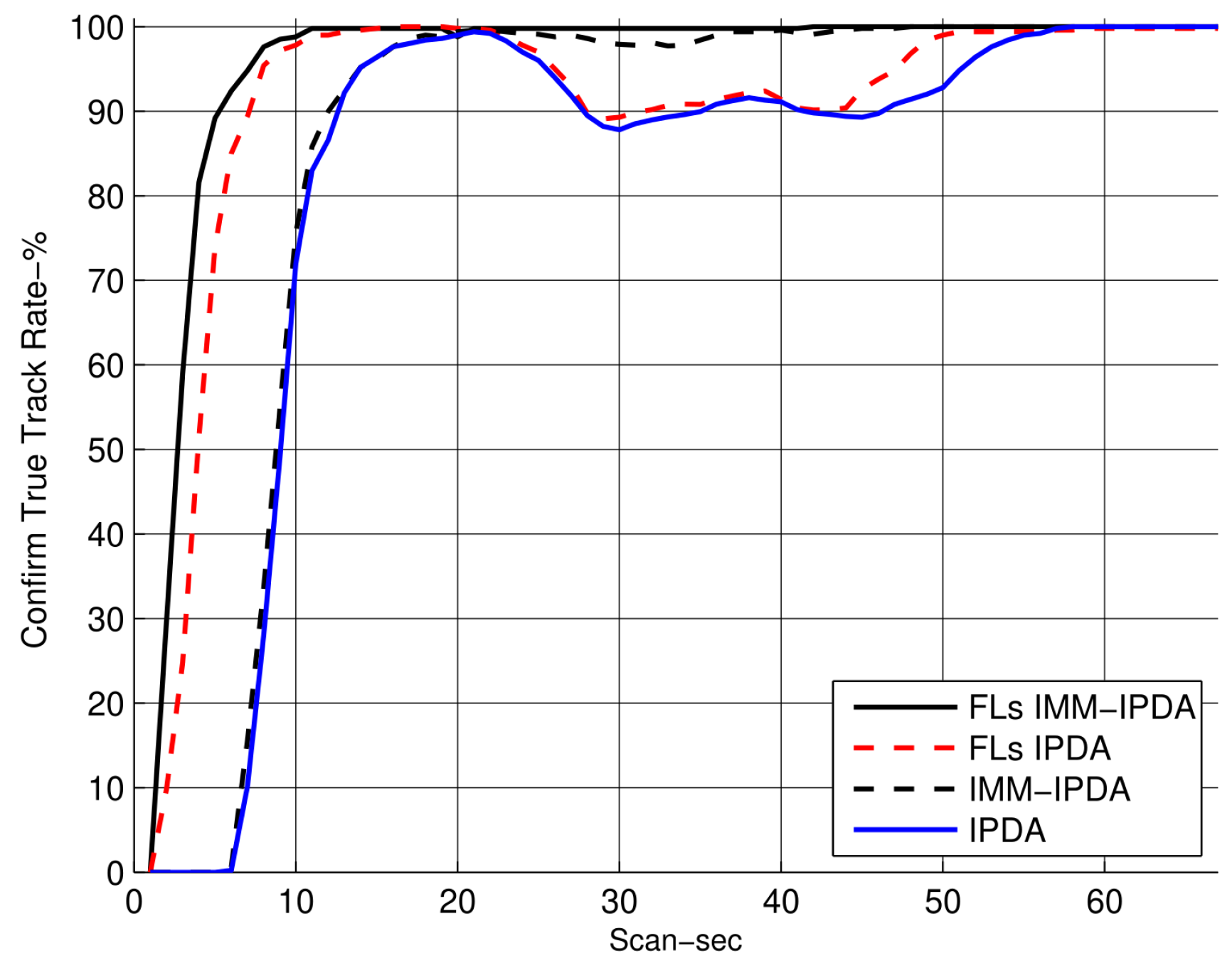
In Figure 5, the RMSE plots for different algorithms are compared with the proposed algorithm. The RMSE performance of the proposed algorithm is shown for the fixed lag . It can be observed that the RMSE performance is improved as compared to the other tracking algorithms. In Figure 6, the CTTR for the proposed algorithm is plotted and it is compared with other different algorithms, which also compare the target existence as an event. The proposed FLs IMM-IPDA tracking algorithm confirms the true tracks much earlier compared to the other existing algorithms.The drop rate is almost negligible in the maneuvering phase compared to the other algorithms.
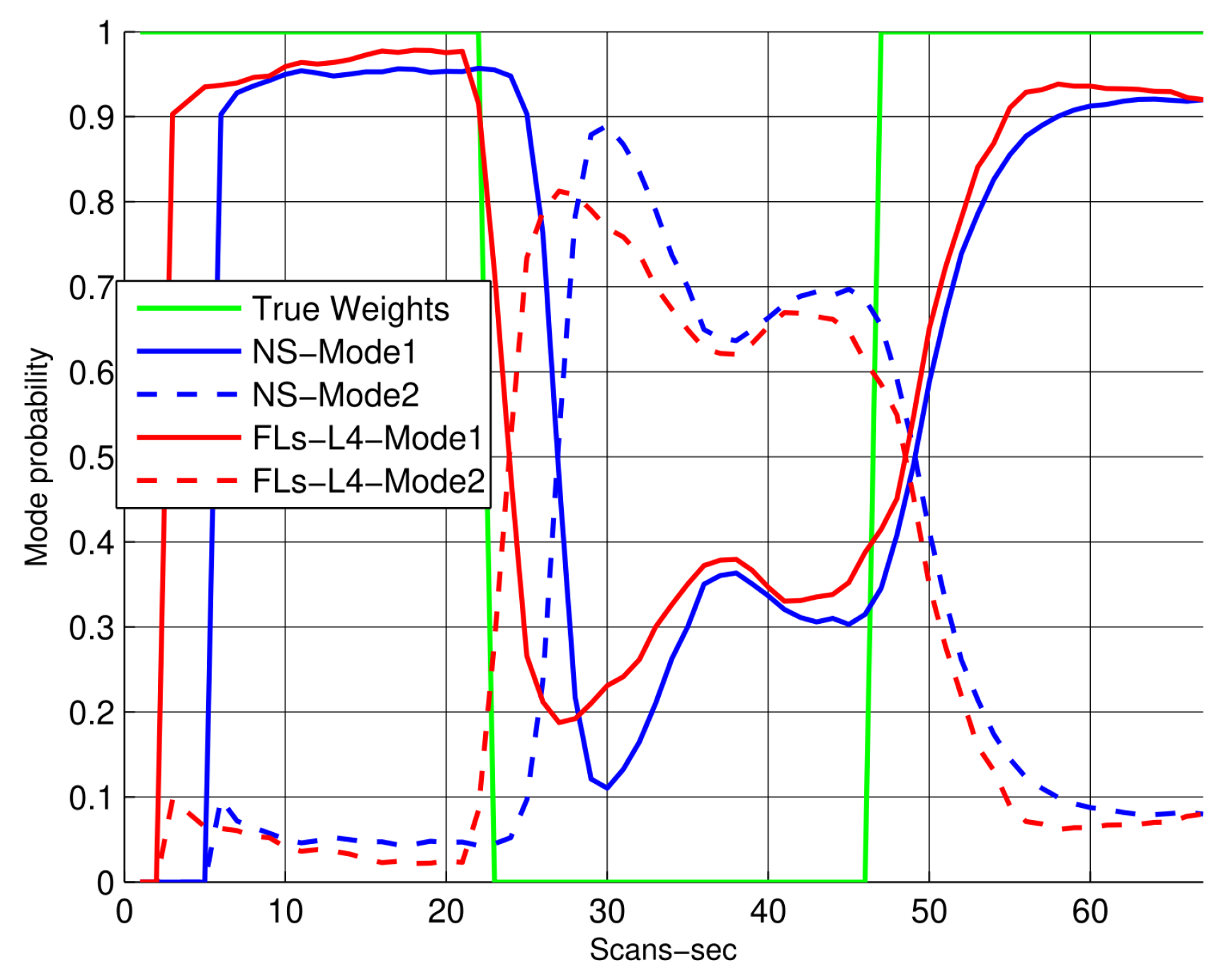
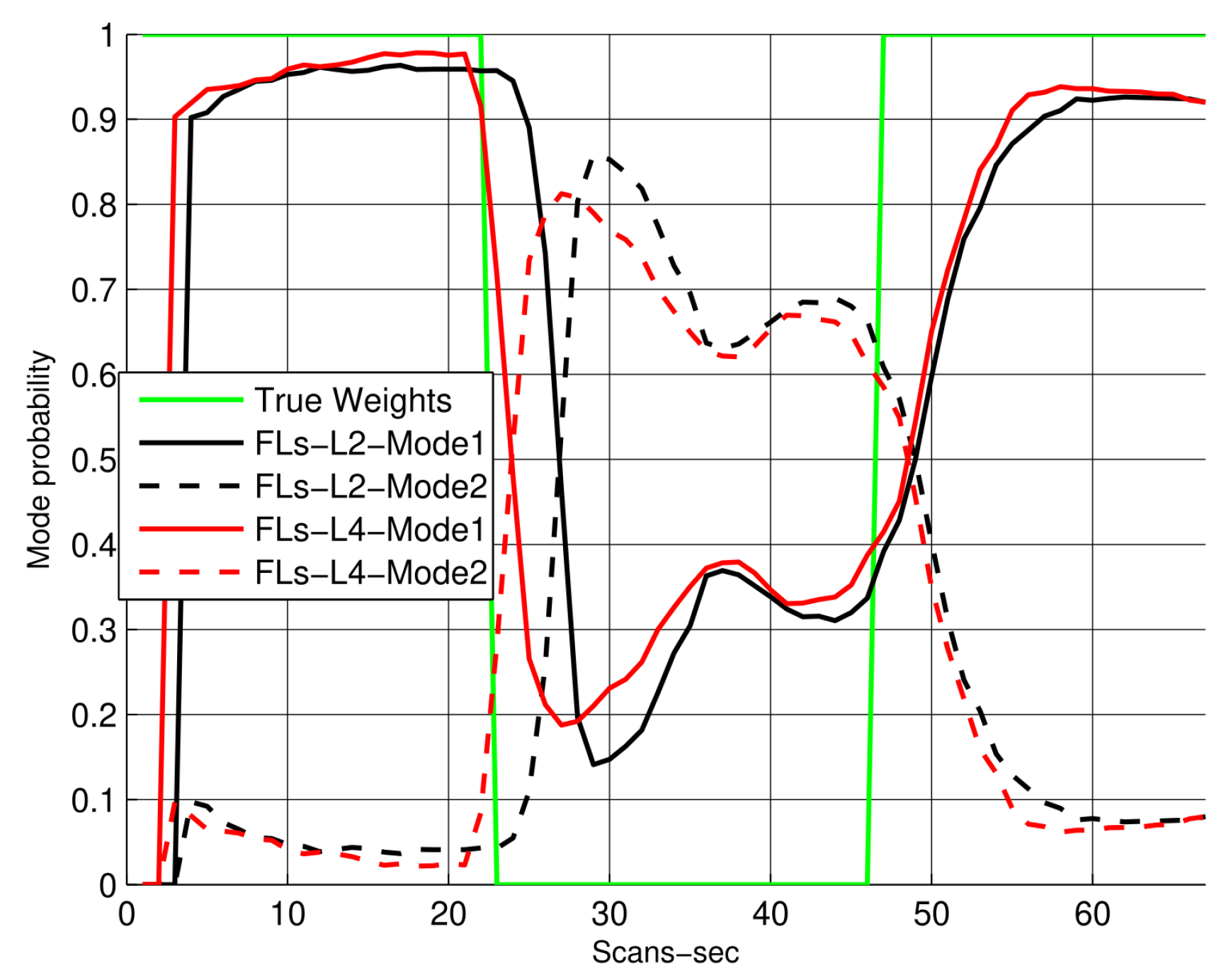
In Figure 7, the mode probabilities for both the CV and CA models are compared among IPDA, IMM, and the proposed smoothing algorithm, which is used here to minimize the ambiguity in the figure (the legend shows NS:Non smoothing algorithm, which in this case is IMM-IPDA, and the proposed algorithm is labeled as FLs-L4, which implies fixed lag smoothing-Lag4). Based on the proposed formula used to obtain the smoothed mode probabilities, it can be observed that the proposed algorithm has shown a significant improvement in terms of mode decisions, and the mode switching is fast compared to other non-smoothing algorithms. Due to these smoothing probabilities, the overall target tracking is improved and its trajectory state estimation error is reduced, which is also evident in Figure 5. The performance of the proposed algorithm for different smoothing lags in terms of mode probabilities is also compared in Figure 8. It can be observed that the smoothing environment helps the algorithm to identify and correct the trajectory modes in a better and abrupt manner.
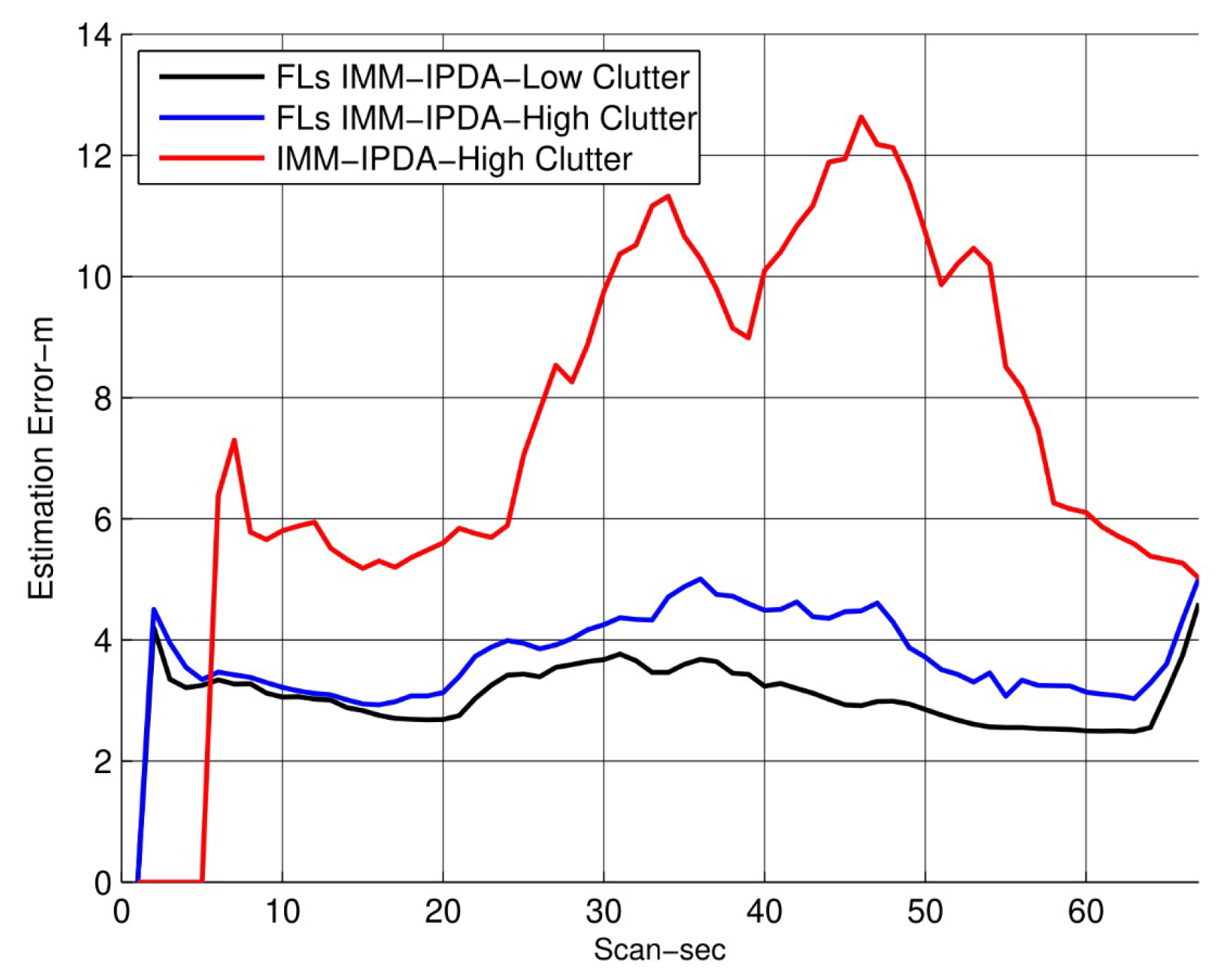
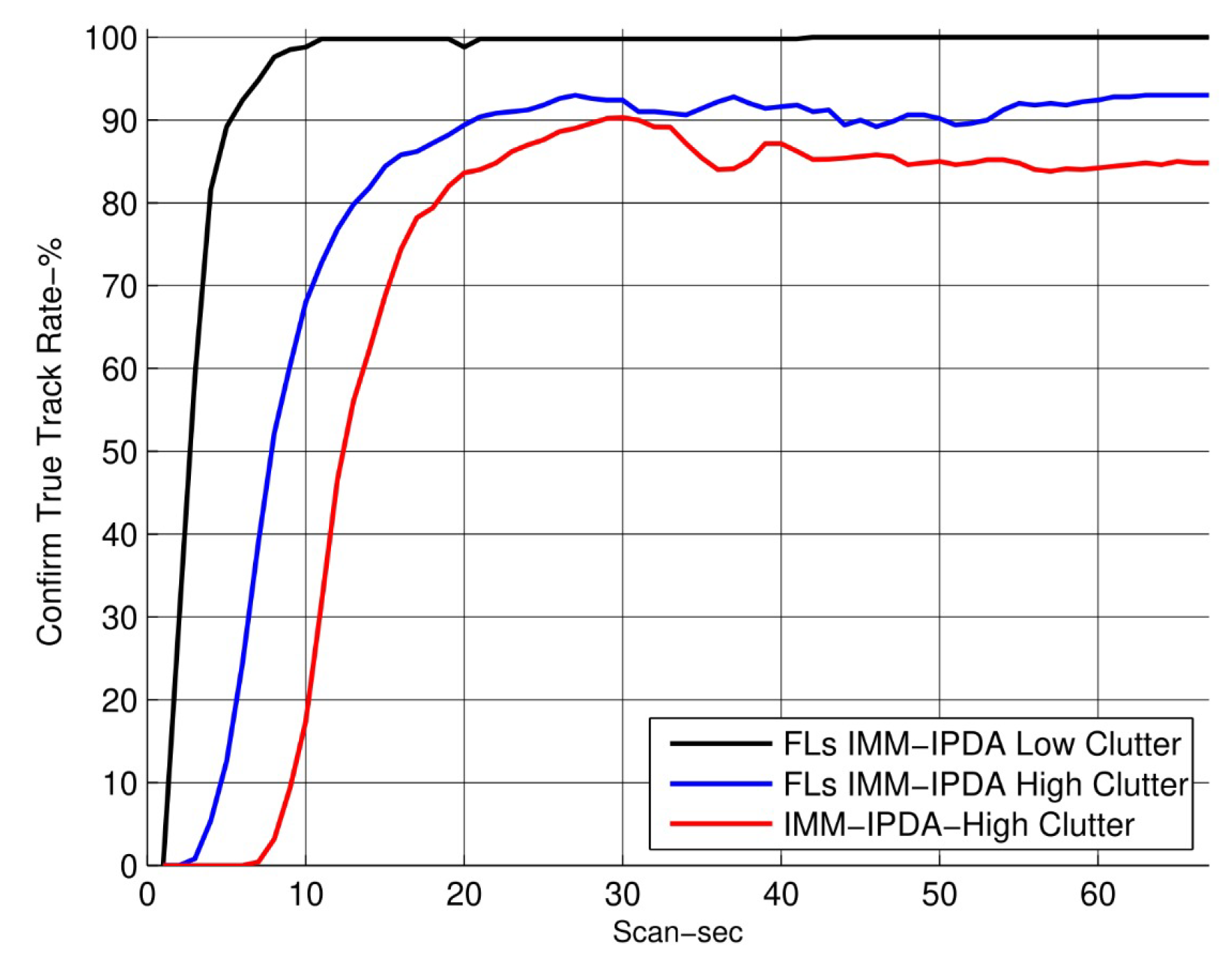
In addition to the above experiments, the results are compared for high clutter density in the same target trajectory environment. The results show the performance of the proposed algorithm in Figure 9 and Figure 10 for the RMSE, TTR, and mode probabilities. In this scenario, the clutter is twice as much, as compared to Figure 5, Figure 6, Figure 7 and Figure 8.
5. Conclusions
In this paper, a fixed lag smoothing technique is suggested to enhance the trajectory state and existence state of the target while it is being maneuvered in the presence of clutter. In addition, the proposed algorithm has provided a complete and generalize mathematical formula to smooth the target mode probabilities while it maneuvers during its motion in the presence of clutter.The target hybrid state and mode probabilities at fixed lag N are not smoothed using the standard IMM-IPDA technique due to the lack of a formal mathematical foundation. The suggested smoothing framework outperformed other methods in the literature, according to simulation findings for RMSE, CTTR, and mode probabilities.
Author Contributions
Conceptualization, G.A.S. and U.K.; methodology, U.K. and Z.M.; software, S.K. and M.S.; validation, U.K., G.A.S.; formal analysis, S.K. and M.S.; investigation, S.A.M. and U.K.; resources, Z.M., U.K., and M.S.; data curation, S.K.; writing—original draft preparation, U.K., G.A.S., and S.K.; writing—review and editing, Z.M., S.K., and M.S.; supervision, U.K.; project administration, U.K. and S.A.M.; funding acquisition, S.A.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research is partially supported by the faculty of the COMSATS University Islamabad, Pakistan and the Department of Defense System Engineering, Sejong University, Seoul, South Korea.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data can be provided on demand.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Appendix A.1. Joint Mode Transition Probabilities
References
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley and Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part V. Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Yuan, X.; Wang, Y.; Su, J. A comparison of interactive multiple modeling algorithms for maneuvering targets tracking. In Proceedings of the IEEE 6th International Conference on Information Science and Control Engineering (ICISCE), Shanghai, China, 20–22 December 2019; pp. 17–22. [Google Scholar]
- Li, B.; Pang, F.; Liang, C.; Chen, X.; Liu, Y. Improved interactive multiple model filter for maneuvering target tracking. In Proceedings of the IEEE Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 7312–7316. [Google Scholar]
- Zhang, H.; Li, L.; Xie, W. Constrained multiple model particle filtering for bearings-only maneuvering target tracking. IEEE Access 2018, 6, 51721–51734. [Google Scholar] [CrossRef]
- Feng, F.X. A New IMM method for tracking maneuvering target. J. Electron. Inf. Technol. 2007, 29, 532–535. [Google Scholar]
- Zhu, W.; Wang, W.; Yuan, G. An improved interacting multiple model filtering algorithm based on the cubature Kalman filter for maneuvering target tracking. Sensors 2016, 16, 805. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bar-Shalom, Y.; Daum, F.; Huang, J. The probabilistic data association filter. IEEE Control. Syst. Mag. 2009, 29, 82–100. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Toloei, A.; Niazi, S. State estimation for target tracking problems with nonlinear Kalman filter algorithms. Int. J. Comput. Appl. 2014, 98, 30–36. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Tse, E. Tracking in a cluttered environment with probabilistic data association. Automatica 1975, 11, 451–460. [Google Scholar] [CrossRef]
- Challa, S.; Morelande, M.R.; Mušicki, D.; Evans, R.J. Fundamentals of Object Tracking; Cambridge University Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Li, B. An improved Bernoulli particle filter for single target tracking. Multidimens. Syst. Signal Process. 2018, 29, 799–819. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple Target Tracking with Radar Applications; Artech House, Inc.: Dedham, MA, USA, 1986; Volume 1. [Google Scholar]
- Blackman, S.S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Radosavljevic, Z.; Ivkovic, D.; Kovacevic, B. MHT and ITS: A Look at Single Target Tracking in Clutter. In Proceedings of the EUSAR 2018, 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1–6. [Google Scholar]
- Khan, U.; Song, T.L. Target tracking with a two-scan data association algorithm extended for the hybrid target state. IET Radar Sonar Navig. 2015, 9, 1330–1337. [Google Scholar] [CrossRef]
- Musicki, D.; La Scala, B.F.; Evans, R.J. Integrated track splitting filter-efficient multi-scan single target tracking in clutter. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1409–1425. [Google Scholar]
- Blackman, S. Design and Analysis of Modern Tracking Systems; Artech House: Boston, MA, USA, 1999. [Google Scholar]
- Zeng, K.; Yi, W.; Peng, Q.; Deng, J. A multi-scan joint tracking and classification method for weak targets. In Proceedings of the IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Wang, G.; Feng, C.; Tao, J.; Mo, R.; Zhang, M. Research on multi-maneuvering target tracking JPDA algorithm. In Proceedings of the IEEE Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 3558–3561. [Google Scholar]
- Dong, P.; Jing, Z.; Gong, D.; Tang, B. Maneuvering multi-target tracking based on variable structure multiple model GMCPHD filter. Signal Process. 2017, 141, 158–167. [Google Scholar] [CrossRef]
- Musicki, D.; Evans, R. Joint integrated probabilistic data association: JIPDA. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1093–1099. [Google Scholar] [CrossRef]
- Fortmann, T.; Bar-Shalom, Y.; Scheffe, M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE J. Ocean. Eng. 1983, 8, 173–184. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Shin, H.S.; Tsourdos, A. Joint probabilistic data association filter with unknown detection probability and clutter rate. Sensors 2018, 18, 269. [Google Scholar] [CrossRef] [Green Version]
- Qi, S.; Qi, C.; Wang, W. Maneuvering target tracking algorithm based on adaptive markov transition probabilitiy matrix and IMM-MGEKF. In Proceedings of the IEEE 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 1–6 December 2018; pp. 1–4. [Google Scholar]
- Han, B.; Huang, H.; Lei, L.; Huang, C.; Zhang, Z. An improved IMM algorithm based on STSRCKF for maneuvering target tracking. IEEE Access 2019, 7, 57795–57804. [Google Scholar] [CrossRef]
- Rashid, M.; Sebt, M.A. Tracking a maneuvering target in the presence of clutter by multiple detection radar and infrared sensor. In Proceedings of the 2017 Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017; pp. 1917–1922. [Google Scholar]
- Musicki, D.; Suvorova, S. Tracking in clutter using IMM-IPDA-based algorithms. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 111–126. [Google Scholar] [CrossRef]
- Chakravorty, R.; Challa, S. Augmented state integrated probabilistic data association smoothing for automatic track initiation in clutter. J. Adv. Inf. Fusion. 2006, 1, 63–74. [Google Scholar]
- Zeb, N.; Hameed, G.; Manzoor, S.; Ullah, I.; Khan, S.; Asad, M.; Jhangiri, Z.M.; Khan, U. A fixed-lag smoothing interactive multiple model tracking and interception system for maneuvering target. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 605–615. [Google Scholar] [CrossRef]
- Khan, U.; Musicki, D.; Song, T.L. A fixed lag smoothing IPDA tracking in clutter. In Proceedings of the IEEE 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 1–4 November 2014; pp. 1–7. [Google Scholar]
- Khan, U.; Shi, Y.F.; Song, T.L. Fixed lag smoothing target tracking in clutter for a high pulse repetition frequency radar. EURASIP J. Adv. Signal Process. 2015, 2015, 47. [Google Scholar] [CrossRef] [Green Version]
- Memon, S.; Son, H.; Memon, K.H.; Ansari, A. Multi-scan smoothing for tracking manoeuvering target trajectory in heavy cluttered environment. IET Radar Sonar Navig. 2017, 11, 1815–1821. [Google Scholar] [CrossRef]
Figure 1.
Smoothing window overview.

Figure 2.
Joint mode events in the smoothing window (lag: N, modes: 2).

Figure 3.
Joint mode events in the smoothing window for M = 2.

Figure 4.
Simulation scenario (red: true target, blue: clutter).

Figure 5.
Root mean square error (the smoothing lag is 4).

Figure 6.
The confirmed true track rate (the smoothing lag is 4).

Figure 7.
Mode probabilities (the smoothing lag is 4).

Figure 8.
Mode probabilities for lag sizes 2 and 4.

Figure 9.
Root mean square error performance for clutter density: .

Figure 10.
True track rate for clutter density: .

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Shah, G.A.; Khan, S.; Memon, S.A.; Shahzad, M.; Mahmood, Z.; Khan, U. Improvement in the Tracking Performance of a Maneuvering Target in the Presence of Clutter. Sensors 2022, 22, 7848. https://doi.org/10.3390/s22207848
AMA Style
Shah GA, Khan S, Memon SA, Shahzad M, Mahmood Z, Khan U. Improvement in the Tracking Performance of a Maneuvering Target in the Presence of Clutter. Sensors. 2022; 22(20):7848. https://doi.org/10.3390/s22207848
Chicago/Turabian StyleShah, Ghawas Ali, Sumair Khan, Sufyan Ali Memon, Mohsin Shahzad, Zahid Mahmood, and Uzair Khan. 2022. "Improvement in the Tracking Performance of a Maneuvering Target in the Presence of Clutter" Sensors 22, no. 20: 7848. https://doi.org/10.3390/s22207848
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.