
Real-Time Gait Phase Detection Using Wearable Sensors for Transtibial Prosthesis Based on a kNN Algorithm

 , , and
, , and
Abstract
:
1. Introduction
2. Materials and Methods
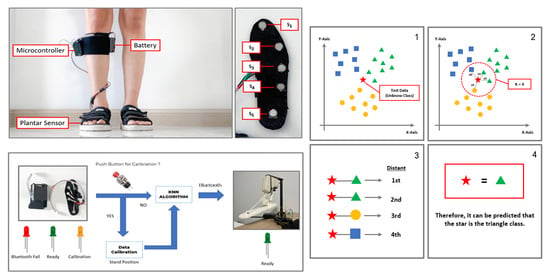
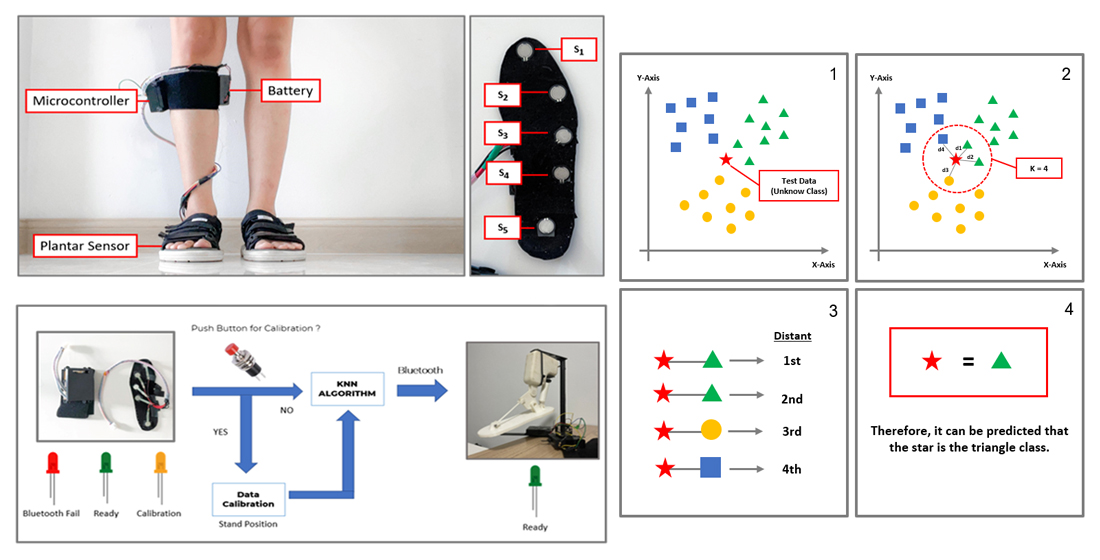
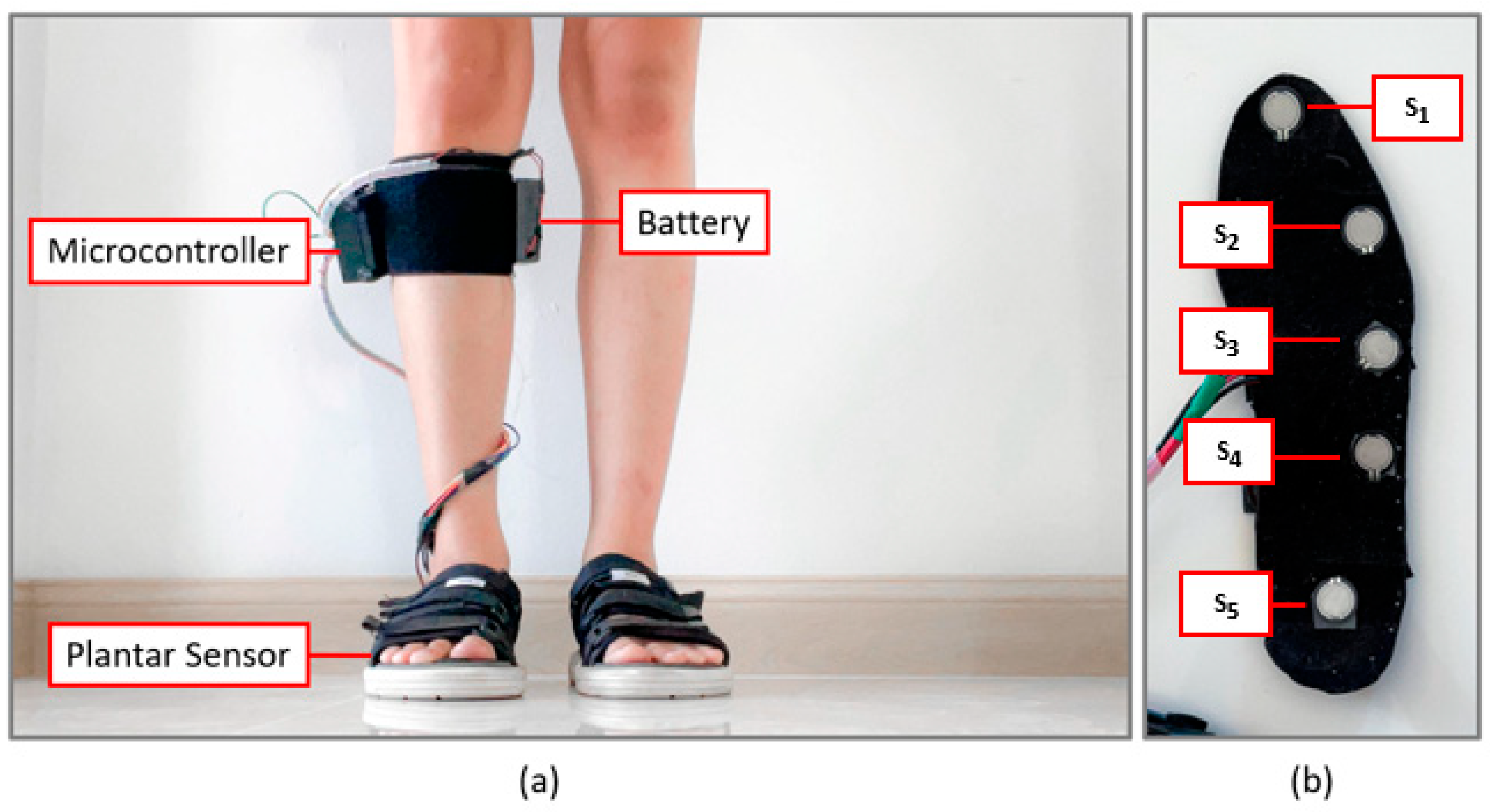
2.1. Hardware Description
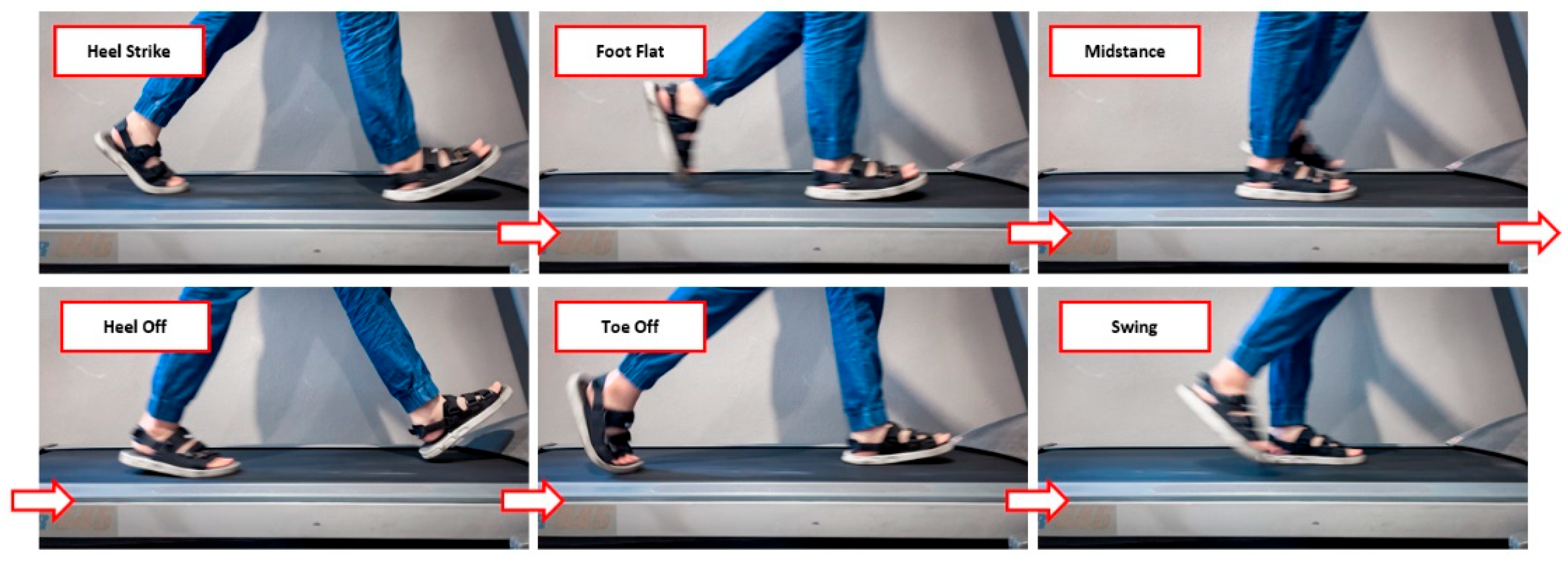
2.2. Participants and Experimental Procedures
2.3. K-Nearest Neighbor Classification
2.4. Distance Weighted kNN Algorithm
2.5. Calibration System
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Benbakhti, A.S.; Boukhenous, S.; Zizoua, C.; Attari, M. An instrumented shoe for ambulatory prevention of diabetic foot ulceration. In Proceedings of the 2014 4th International Conference on Wireless Mobile Communication and Healthcare—Transforming Healthcare through Innovations in Mobile and Wireless Technologies (MOBIHEALTH), Athens, Greece, 3–5 November 2014; pp. 43–46. [Google Scholar]
- Aqueveque, P.; Osorio, R.; Pastene, F.; Saavedra, F.; Pino, E. Capacitive Sensors Array for Plantar Pressure Measurement Insole fabricated with Flexible PCB. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 4393–4396. [Google Scholar]
- Varol, H.A.; Goldfarb, M. Real-time Intent Recognition for a Powered Knee and Ankle Transfemoral Prosthesis. In Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; pp. 16–23. [Google Scholar]
- Zhao, H.; Wang, Z.; Qiu, S.; Shen, Y.; Wang, J. IMU-based gait analysis for rehabilitation assessment of patients with gait disorders. In Proceedings of the 2017 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 622–626. [Google Scholar]
- Huang, H.; Zhou, P.; Li, Y.; Sun, F. A Lightweight Attention-Based CNN Model for Efficient Gait Recognition with Wearable IMU Sensors. Sensors 2021, 21, 2866. [Google Scholar] [CrossRef] [PubMed]
- Mahoney, J.M.; Rhudy, M.B. Methodology and validation for identifying gait type using machine learning on IMU data. J. Med. Eng. Technol. 2019, 43, 25–32. [Google Scholar] [CrossRef] [PubMed]
- Wu, C.-C.; Wen, Y.-T.; Lee, Y.-J. IMU sensors beneath walking surface for ground reaction force prediction in gait. IEEE Sens. J. 2020, 20, 9372–9376. [Google Scholar] [CrossRef]
- Park, J.S.; Lee, C.M.; Koo, S.-M.; Kim, C.H. Gait Phase Detection Using Force Sensing Resistors. IEEE Sens. J. 2020, 20, 6516–6523. [Google Scholar] [CrossRef]
- Huang, B.; Chen, M.; Shi, X.; Xu, Y. Gait Event Detection with Intelligent Shoes. In Proceedings of the 2007 International Conference on Information Acquisition, Seogwipo, Korea, 8–11 July 2007; pp. 579–584. [Google Scholar]
- Nagashima, M.; Cho, S.-G.; Ding, M.; Ricardez, G.A.G.; Takamatsu, J.; Ogasawara, T. Prediction of Plantar Forces During Gait Using Wearable Sensors and Deep Neural Networks. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 3629–3632. [Google Scholar]
- Ledoux, E.D. Inertial Sensing for Gait Event Detection and Transfemoral Prosthesis Control Strategy. IEEE Trans. Biomed. Eng. 2018, 65, 2704–2712. [Google Scholar] [CrossRef] [PubMed]
- Alaqtash, M.; Sarkodie-Gyan, T.; Yu, H.; Fuentes, O.; Brower, R.; Abdelgawad, A. Automatic classification of pathological gait patterns using ground reaction forces and machine learning algorithms. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 453–457. [Google Scholar]
- Pogorelc, B.; Bosnić, Z.; Gams, M. Automatic recognition of gait-related health problems in the elderly using machine learning. Multimed. Tools Appl. 2011, 58, 333–354. [Google Scholar] [CrossRef] [Green Version]
- Jasni, F.; Hamzaid, N.A.; Al-Nusairi, T.Y.; Yusof, N.H.M.; Shasmin, H.N.; Ng, S. Feasibility of a Gait Phase Identification Tool for Transfemoral Amputees Using Piezoelectric—Based In-Socket Sensory System. IEEE Sens. J. 2019, 19, 6437–6444. [Google Scholar] [CrossRef]
- Shaikh, M.F.; Salcic, Z.; Wang, K. Analysis and selection of the Force Sensitive Resistors for gait characterisation. In Proceedings of the 2015 6th International Conference on Automation, Robotics and Applications (ICARA), Queenstown, New Zealand, 17–19 February 2015; pp. 370–375. [Google Scholar]
- Hu, Y.; Li, X.; Liu, Q. Design and Research of Gait Recognition Method of Upper Knee Prosthesis Based on kNN Algorithm. In Proceedings of the 2019 4th International Conference on Robotics, Control and Automation (ICRCA 2019), Association for Computing Machinery, New York, NY, USA, 26–28 July 2019; pp. 173–177. [Google Scholar]
- Prado, A.; Cao, X.; Ding, X.; Agrawal, S.K. Prediction of Gait Cycle Percentage Using Instrumented Shoes with Artificial Neural Networks. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 2834–2840. [Google Scholar]
- Zhao, Z.; Chen, W.; Yixin, Z.; Pinghua, A.; Wang, J. A Wireless Foot Plantar Pressure Distribution Measurement System and Its Application in Gait Analysis. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 1397–1402. [Google Scholar]
- Han, Y.C.; Wong, K.I.; Murray, I. Gait Phase Detection for Normal and Abnormal Gaits Using IMU. IEEE Sens. J. 2019, 19, 3439–3448. [Google Scholar] [CrossRef]
- Alahakone, A.U.; Senanayake, S.M.N.A.; Senanayake, C.M. Smart wearable device for real time gait event detection during running. In Proceedings of the 2010 IEEE Asia Pacific Conference on Circuits and Systems, Kuala Lumpur, Malaysia, 6–9 December 2010; pp. 612–615. [Google Scholar]
- Prakash, C.; Kumar, R.; Mittal, N. Automated detection of human gait events from conventional videography. In Proceedings of the 2016 International Conference on Emerging Trends in Communication Technologies (ETCT), Dehradun, India, 18–19 November 2016; pp. 1–4. [Google Scholar]
- Malešević, N.; Malešević, J.; Keller, T. Gait phase detection optimization based on variational bayesian inference of feedback sensor signal. In Proceedings of the 12th Symposium on Neural Network Applications in Electrical Engineering (NEUREL), Belgrade, Serbia, 25–27 November 2014; pp. 179–182. [Google Scholar]
- Senanayake, C.M.; Senanayake, S.M.N.A. Computational Intelligent Gait-Phase Detection System to Identify Pathological Gait. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 1173–1179. [Google Scholar] [CrossRef] [PubMed]
- Chakraborty, S.; Nandy, A. An Unsupervised Approach For Gait Phase Detection. In Proceedings of the 2020 4th International Conference on Computational Intelligence and Networks (CINE), Kolkata, India, 27–29 February 2020; pp. 1–5. [Google Scholar]
- Jumphoo, T.; Uthansakul, M.; Uthansakul, P. Brainwave classification without the help of limb movement and any stimulus for character-writing application. Cogn. Syst. Res. 2019, 58, 375–386. [Google Scholar] [CrossRef]
- Kokkhunthod, K.; Jumphoo, T.; Uthansakul, P. Improving brainwave classification for character-writing application using single effective EEG channel in SUT. In Proceedings of the International Virtual Conference on Science and Technology, Nakhon Ratchasima, Thailand, 28 August 2020; pp. 142–148. [Google Scholar]
- Phapatanaburi, K.; Kokkhunthod, K.; Wang, L.; Jumphoo, T.; Uthansakul, M.; Boonmahitthisud, A.; Uthansakul, P. Brainwave Classification for Character-Writing Application using EMD-based GMM and KELM approaches. Comput. Mater. Contin. 2021, 66, 3029–3044. [Google Scholar] [CrossRef]
- Jumphoo, T.; Uthansakul, M.; Duangmanee, P.; Khan, N.; Uthansakul, P. Soft Robotic Glove Controlling Using Brainwave Detection for Continuous Rehabilitation at Home. Comput. Mater. Contin. 2020, 66, 961–976. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gait Cycle | Precision | Recall | F1-Score | Accuracy (%) |
|---|---|---|---|---|
| Stand | 0.750 | 0.700 | 0.724 | 70.00 |
| Heel Strike | 0.875 | 0.933 | 0.903 | 93.34 |
| Foot Flat | 0.880 | 0.733 | 0.800 | 73.33 |
| Midstance | 0.606 | 0.667 | 0.635 | 66.67 |
| Heel Off | 0.846 | 0.733 | 0.786 | 73.33 |
| Toe Off | 0.778 | 0.933 | 0.848 | 93.34 |
| Swing | 1 | 1 | 1 | 100.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rattanasak, A.; Uthansakul, P.; Uthansakul, M.; Jumphoo, T.; Phapatanaburi, K.; Sindhupakorn, B.; Rooppakhun, S. Real-Time Gait Phase Detection Using Wearable Sensors for Transtibial Prosthesis Based on a kNN Algorithm. Sensors 2022, 22, 4242. https://doi.org/10.3390/s22114242
Rattanasak A, Uthansakul P, Uthansakul M, Jumphoo T, Phapatanaburi K, Sindhupakorn B, Rooppakhun S. Real-Time Gait Phase Detection Using Wearable Sensors for Transtibial Prosthesis Based on a kNN Algorithm. Sensors. 2022; 22(11):4242. https://doi.org/10.3390/s22114242
Chicago/Turabian StyleRattanasak, Atcharawan, Peerapong Uthansakul, Monthippa Uthansakul, Talit Jumphoo, Khomdet Phapatanaburi, Bura Sindhupakorn, and Supakit Rooppakhun. 2022. "Real-Time Gait Phase Detection Using Wearable Sensors for Transtibial Prosthesis Based on a kNN Algorithm" Sensors 22, no. 11: 4242. https://doi.org/10.3390/s22114242