
A Dual-Mode 303-Megaframes-per-Second Charge-Domain Time-Compressive Computational CMOS Image Sensor

Abstract
:1. Introduction
2. Macro-Pixel Multi-Tap Computational CMOS Image Sensor Architecture
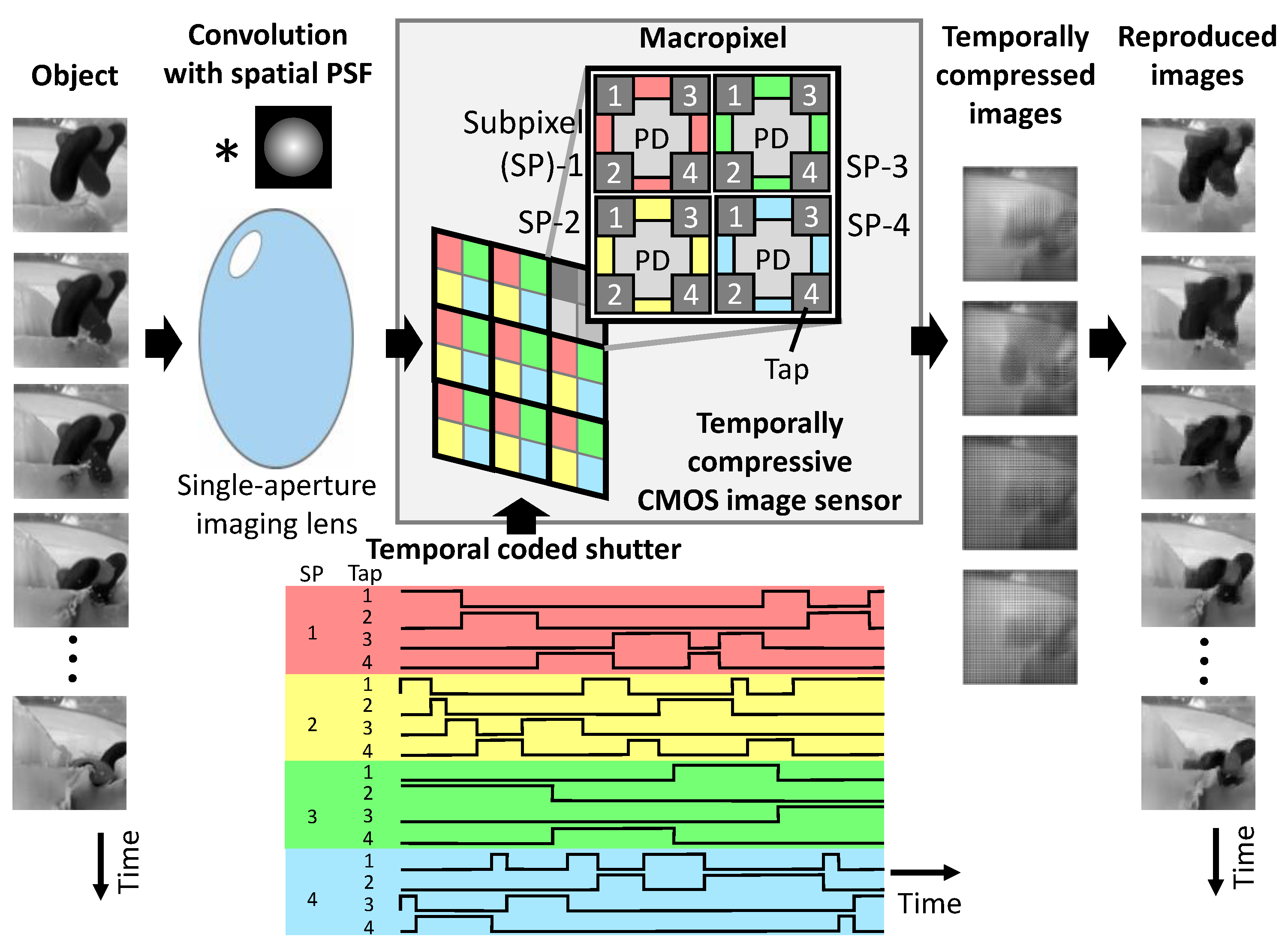
2.1. Imaging System Configuration
2.2. Compressive Sensing and Imaging
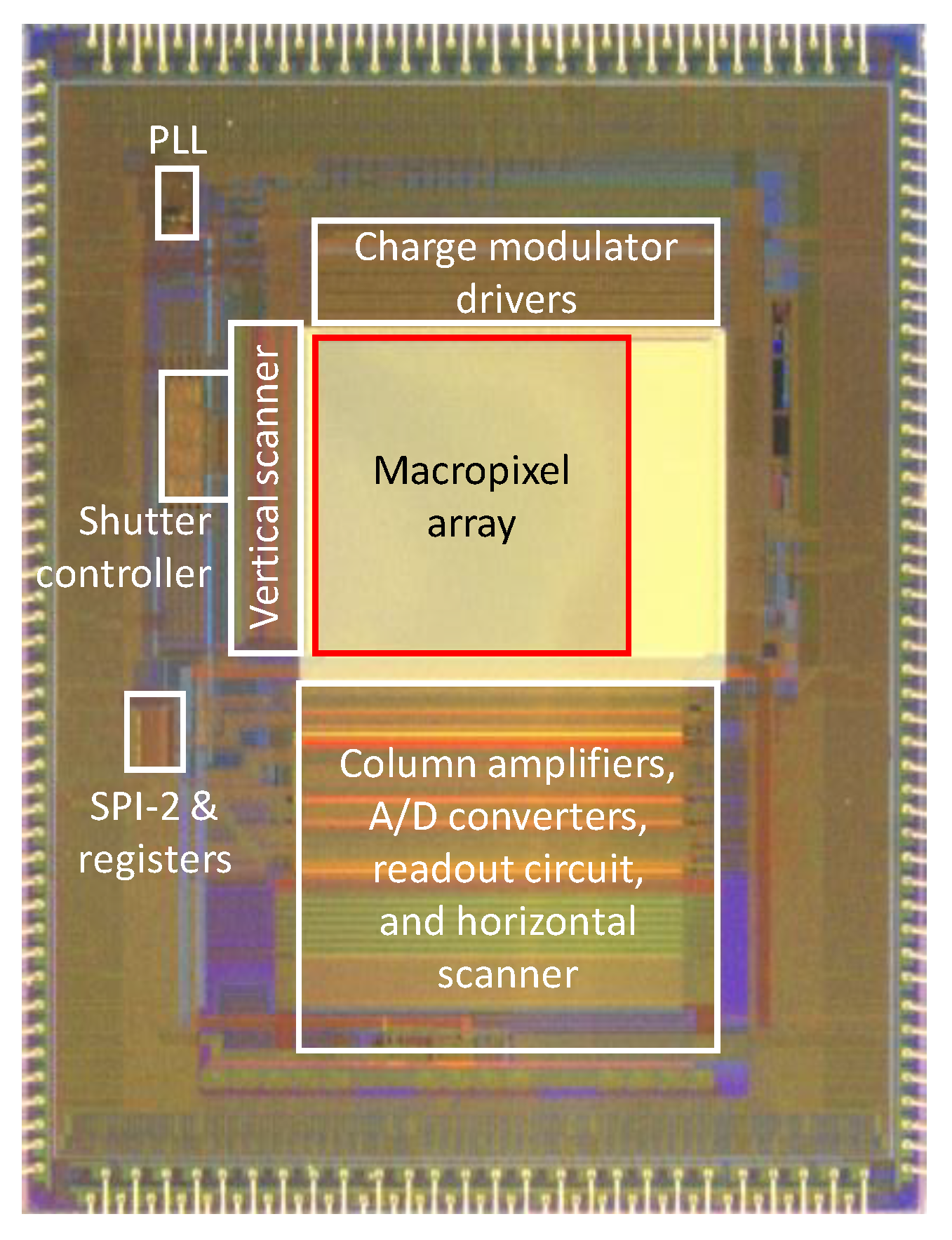
3. Chip Implementation
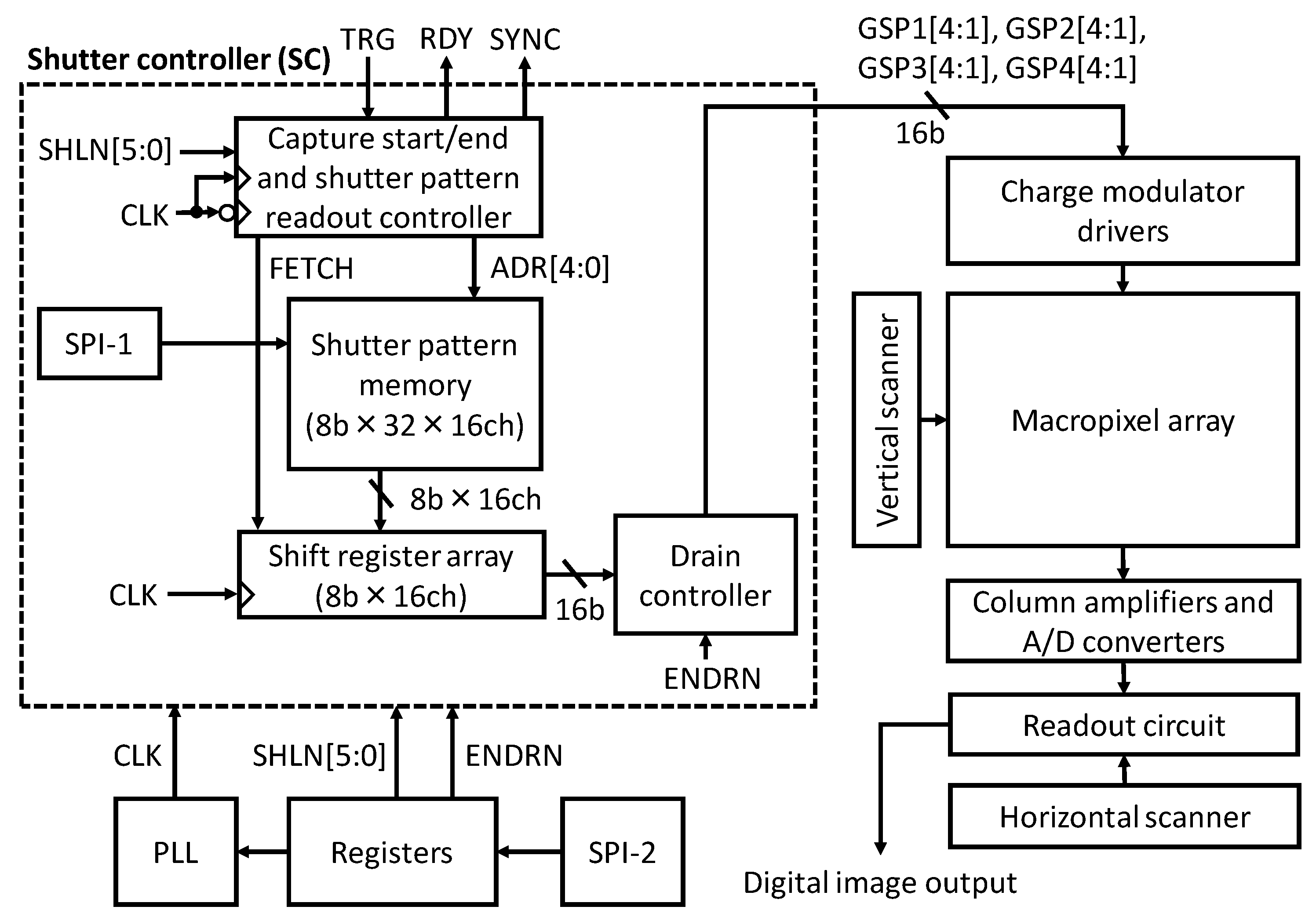
3.1. Sensor Architecture
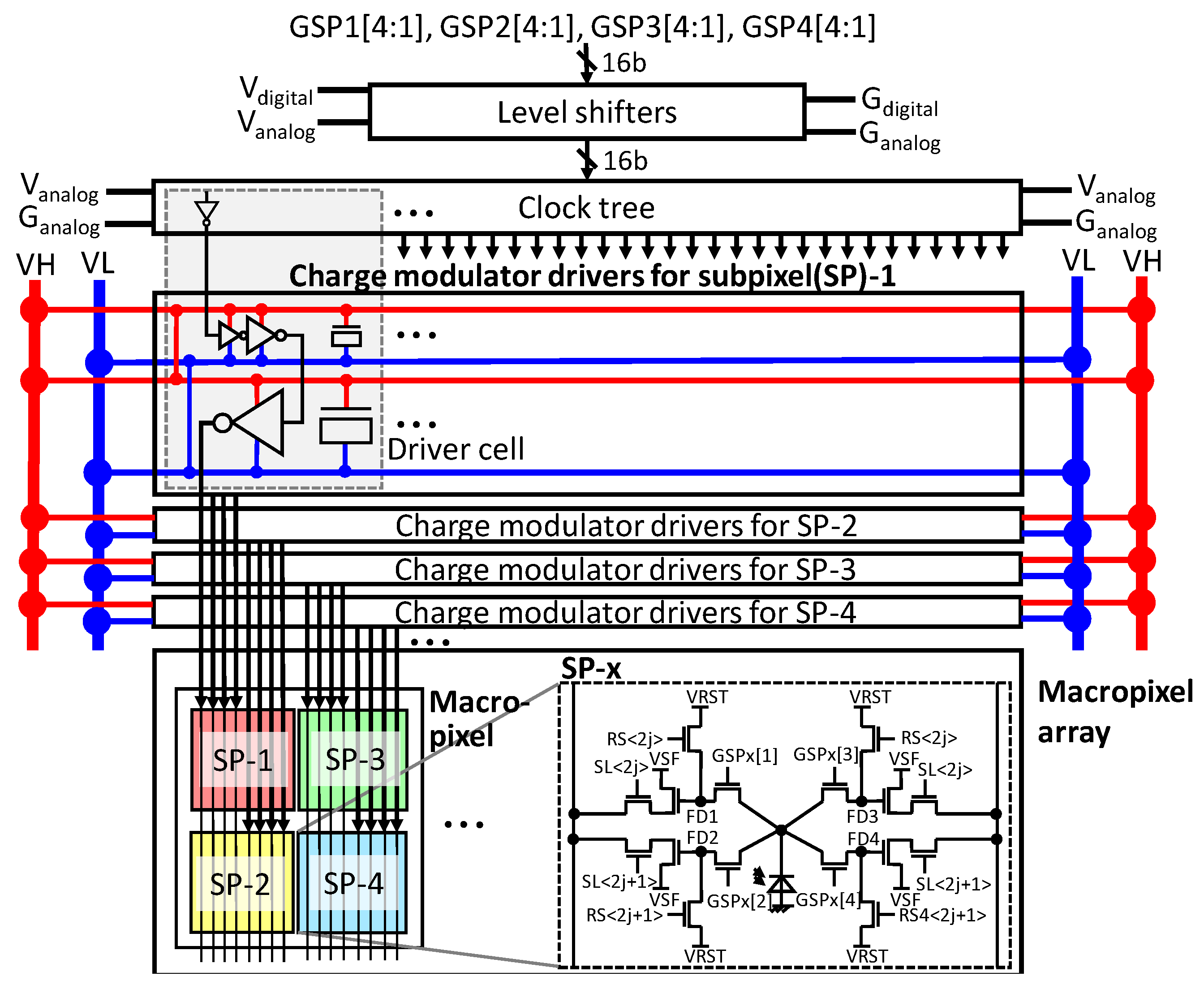
3.2. Pixels and Drivers
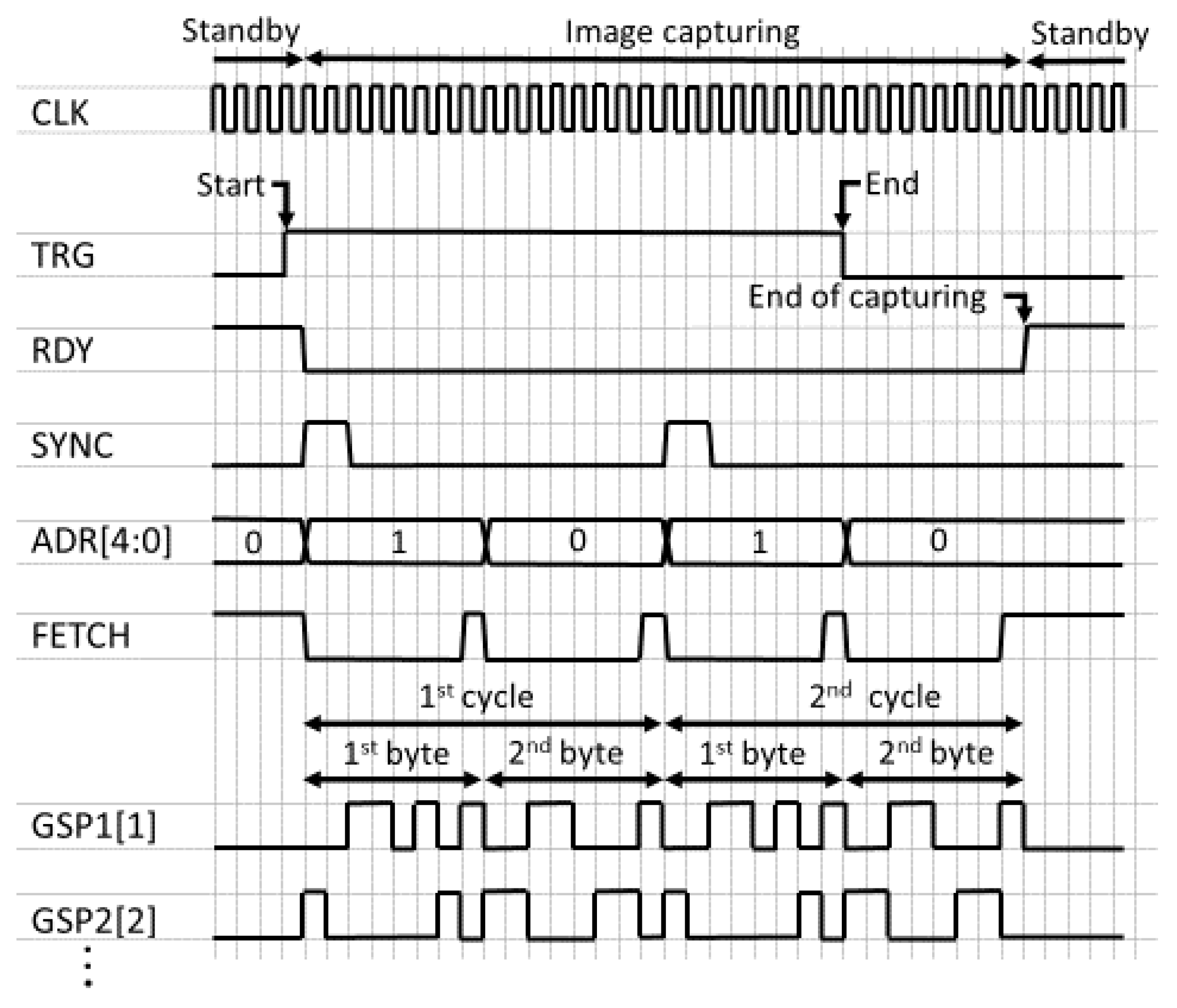
3.3. Timing Chart
4. Experimental Results
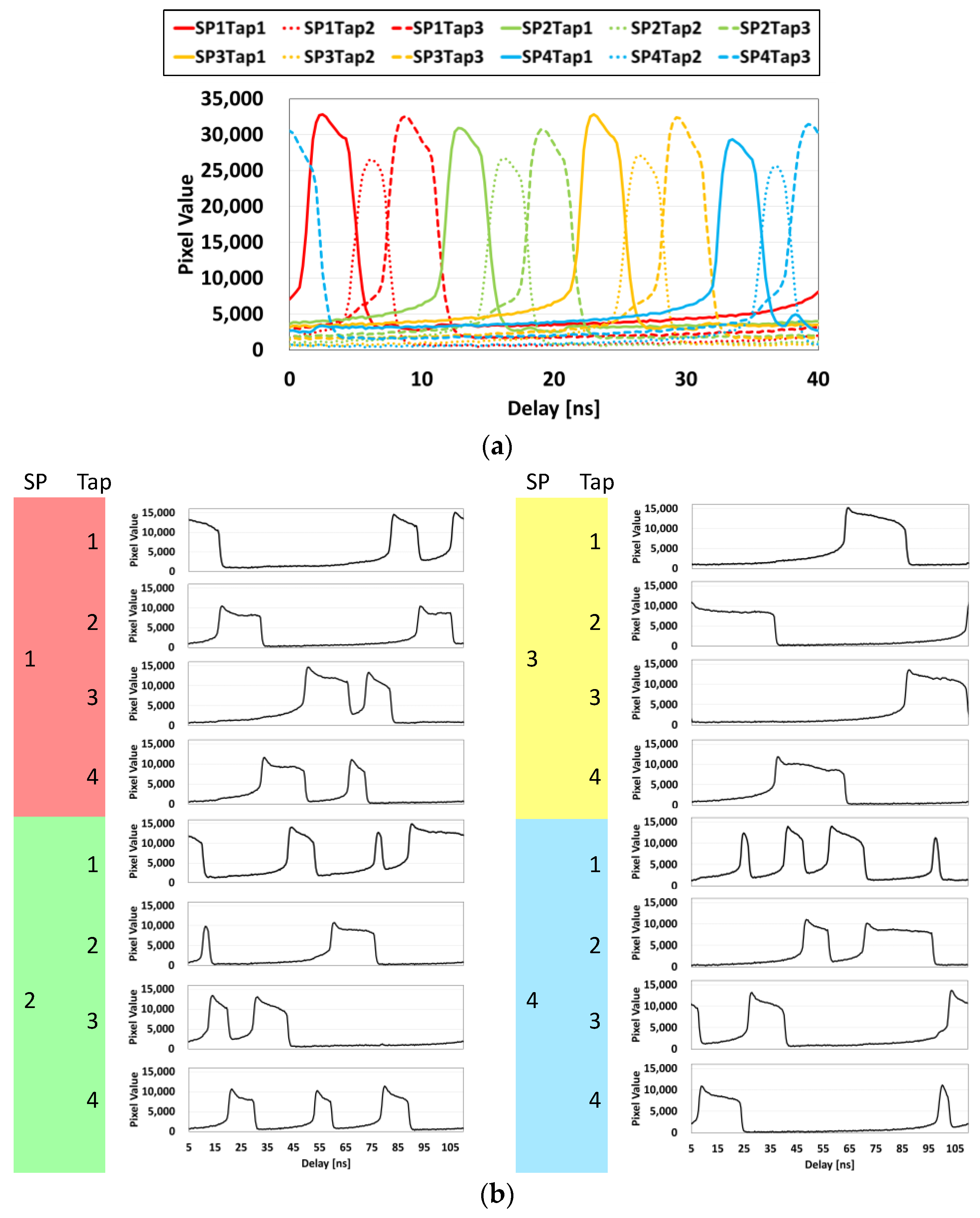
4.1. Basic Characteristics
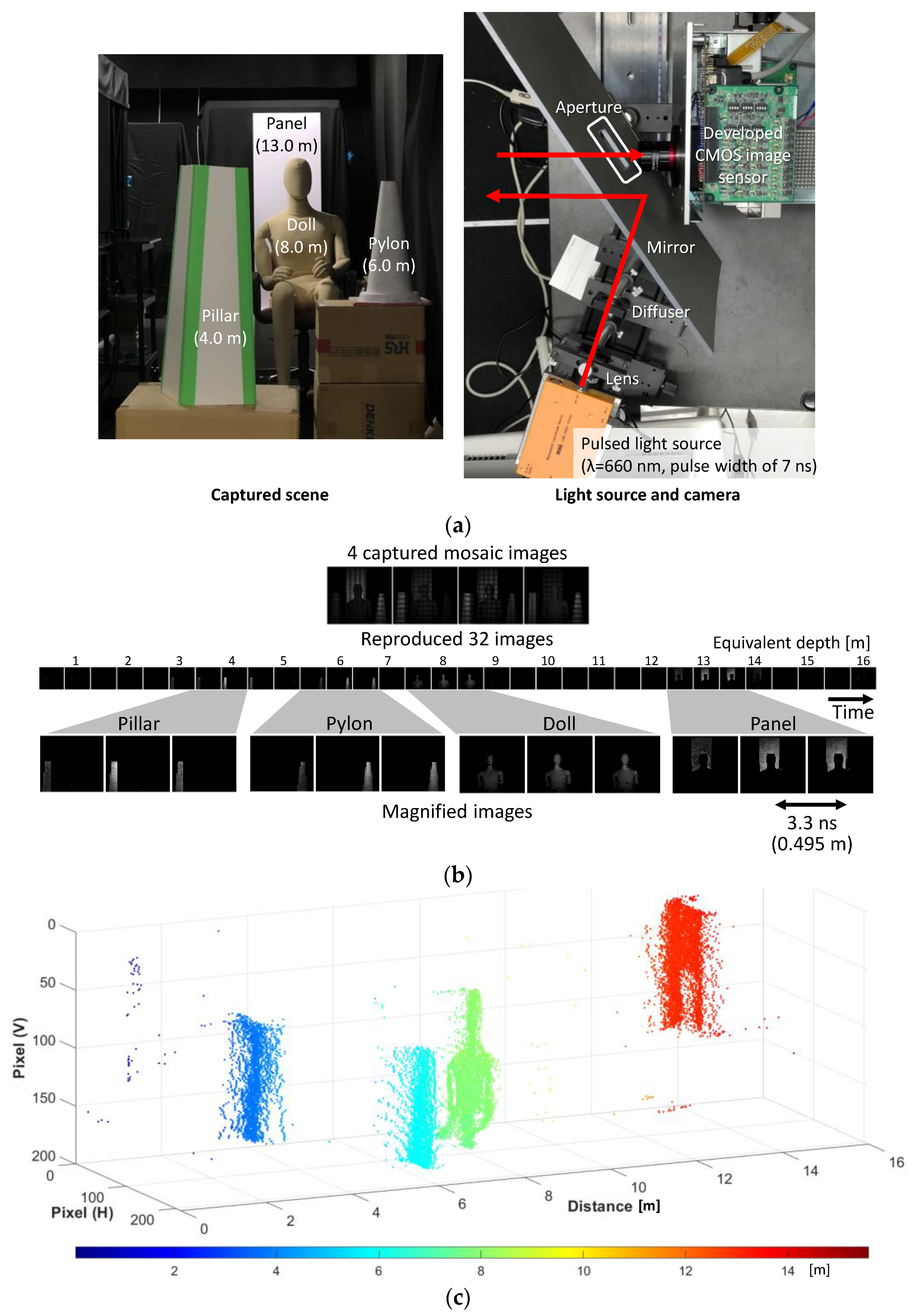
4.2. Single-Event Filming
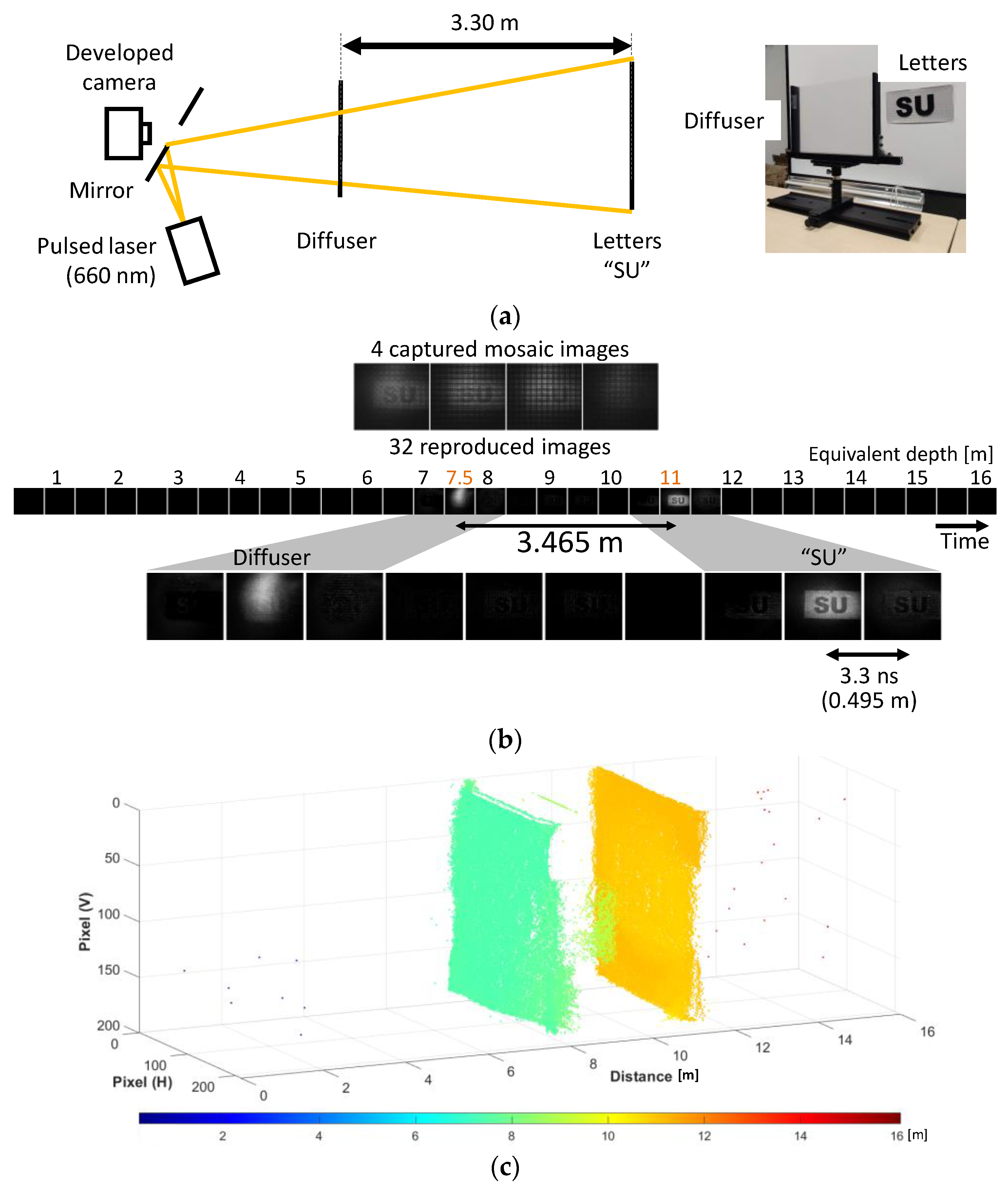
4.3. Transient Imaging of Light
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tsuji, K. The Micro-World Observed by Ultra High-Speed Cameras; Springer: Gewerbestrasse, Switzland, 2018. [Google Scholar]
- Nakagawa, N.; Iwasaki, A.; Oishi, Y.; Horisaki, R.; Tsukamoto, A.; Nakamura, A.; Hirosawa, K.; Liao, H.; Ushida, T.; Goda, K.; et al. Sequentially timed all-optical mapping photography (STAMP). Nat. Photonics 2014, 8, 695–700. [Google Scholar] [CrossRef]
- Gao, L.; Liang, J.; Li, C.; Wang, L.V. Single-shot compressed ultrafast photography at one hundred billion frames per second. Nature 2014, 516, 74–77. [Google Scholar] [CrossRef]
- Tochigi, Y.; Hanzawa, K.; Kato, Y.; Kuroda, R.; Mutoh, H.; Hirose, R.; Tominaga, H.; Takubo, K.; Kondo, Y.; Sugawa, S. A global-shutter CMOS image sensor with readout speed of 1Tpixel/s burst and 780Mpixel/s continuous. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 19–23 February 2012; pp. 382–383. [Google Scholar]
- Etoh, T.; Okinaka, T.; Takano, Y.; Takehara, K.; Nakano, H.; Shimonomura, K.; Ando, T.; Ngo, N.; Kamakura, Y.; Dao, V.; et al. Light-in-flight imaging by a silicon image sensor: Toward the theoretical highest frame rate. Sensors 2019, 19, 2247. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suzuki, M.; Sugama, Y.; Kuroda, R.; Sugawa, S. Over 100 million frames per second 368 frames global shutter burst CMOS image sensor with pixel-wise trench capacitor memory array. In Proceedings of the 2019 International Image Sensor Workshop (IISW), Snowbird, UT, USA, 23–27 June 2019; pp. 266–269. [Google Scholar]
- Mochizuki, F.; Kagawa, K.; Okihara, S.; Seo, M.-W.; Zhang, B.; Takasawa, T.; Yasutomi, K.; Kawahito, S. Single-shot 200Mfps 5x3-aperture compressive CMOS imager. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 22–26 February 2015; pp. 116–117. [Google Scholar]
- Mochizuki, F.; Kagawa, K.; Okihara, S.; Seo, M.-W.; Zhang, B.; Takasawa, T.; Yasutomi, K.; Kawahito, S. Single-event transient imaging with an ultra-high-speed temporally compressive multi-aperture CMOS image sensor. Optics Express 2016, 24, 4155–4176. [Google Scholar] [CrossRef] [PubMed]
- Sonoda, T.; Nagahara, H.; Endo, K.; Sugiyama, Y.; Taniguchi, R. High-speed imaging using CMOS image sensor with quasi pixel-wise exposure. In Proceedings of the IEEE Int’l Conference on Computational Photography (ICCP), Evanston, IL, USA, 13–15 May 2016; pp. 81–91. [Google Scholar]
- Luo, Y.; Jiang, J.; Cai, M.; Mirabbasi, S. CMOS computational camera with a two-tap coded exposure image sensor for single-shot spatial-temporal compressive sensing. Optics Express 2019, 27, 31475–31489. [Google Scholar] [CrossRef] [PubMed]
- Remondino, F.; Stoppa, D. TOF Range-Imaging Cameras; Springer: Heidelberg, Germany, 2013. [Google Scholar]
- Bamji, C.S.; Mehta, S.; Thompson, B.; Elkhatib, T.; Wurster, S.; Akkaya, O.; Payne, A.; Godbaz, J.; Fenton, M.; Rajasekaran, V.; et al. 1Mpixel 65nm BSI 320MHz Demodulated TOF Image Sensor with 3.5μm Global Shutter Pixels and Analog Binning. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 11–15 February 2018; pp. 94–95. [Google Scholar]
- Ebiko, Y.; Yamagishi, H.; Tatani, K.; Iwamoto, H.; Moriyama, Y.; Hagiwara, Y.; Maeda, S.; Murase, T.; Suwa, T.; Arai, H.; et al. Low power consumption and high resolution 1280 × 960 gate assisted photonic demodulator pixel for indirect time of flight. In Proceedings of the IEEE Int’l Electron Devices Meeting (IEDM), San Francisco, CA, USA, 12–18 December 2020; pp. 33.1.1–33.1.4. [Google Scholar]
- Keel, M.S.; Kim, D.; Kim, Y.; Bae, M.; Ki, M.; Chung, B.; Son, S.; Lee, H.; Jo, H.; Shin, S.C.; et al. 4-tap 3.5 μm 1.2 Mpixel indirect time-of-flight CMOS image sensor with peak current mitigation and multi-user interference cancellation. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 13–22 February 2021; pp. 106–108. [Google Scholar]
- Kawahito, S.; Baek, G.; Li, Z.; Han, S.; Seo, M.; Yasutomi, K.; Kagawa, K. CMOS lock-in pixel image sensors with lateral electric field control for time-resolved imaging. In Proceedings of the Int’l Image Sensor Workshop (IISW), Snowbird, UT, USA, 12–16 June 2013; pp. 361–364. [Google Scholar]
- Niclass, C.; Rochas, A.; Besse, P.A.; Charbon, E. Design and characterization of a CMOS 3-D image sensor based on single photon avalanche diodes. IEEE J. Solid-State Circuits 2005, 40, 1847–1854. [Google Scholar] [CrossRef] [Green Version]
- Kagawa, K.; Kokado, T.; Sato, Y.; Mochizuki, F.; Nagahara, H.; Takasawa, T.; Yasutomi, K.; Kawahito, S. Multi-tap macro-pixel based compressive ultra-high-speed CMOS image sensor. In Proceedings of the Int’l Image Sensor Workshop (IISW), Snowbird, UT, USA, 23–27 June 2019; pp. 270–273. [Google Scholar]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Cades, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Processing Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Baraniuk, R.G. Compressive sensing. IEEE Signal Processing Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Duartte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F.; Baraniuk, R.G. Single-pixel imaging via compressive sampling. IEEE Signal Processing Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef] [Green Version]
- Shankar, M.; Pitsianis, P.; Brady, D.J. Compressive video sensors using multichannel imagers. Appl. Opt. 2010, 49, B9–B17. [Google Scholar] [CrossRef] [PubMed]
- Gehm, M.E.; John, R.; Brady, D.J.; Willett, R.M.; Schulz, T.J. Single-shot compressive spectral imaging with a dual-disperser architecture. Optics Express 2007, 15, 14013–14027. [Google Scholar] [CrossRef] [PubMed]
- Bobin, J.; Starck, J.; Ottensamer, R. Compressed sensing in astronomy. IEEE J. Selected Topics in Sig. Proc. 2008, 2, 718–726. [Google Scholar] [CrossRef] [Green Version]
- Graff, C.G.; Sidky, Y. Compressive sensing in medical imaging. Appl. Opt. 2015, 51, C23–C44. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Zhang, L.Y.; Zhou, J.; Liu, L.; Chen, F.; He, X. A review of compressive sensing in information security field. IEEE Access 2016, 4, 2507–2519. [Google Scholar] [CrossRef]
- Tang, C.; Tian, G.; Li, K.; Sutthaweekul, R.; Wu, J. Smart compressed sensing for online evaluation of CFRP structure integrity. IEEE Trans. Ind. Electron. 2017, 64, 9608–9617. [Google Scholar] [CrossRef]
- Dadkhah, M.; Deen, M.J.; Shirani, S. Compressive sensing image sensors-hardware implementation. Sensors 2013, 13, 4961–4978. [Google Scholar] [CrossRef] [Green Version]
- Yasutomi, K.; Okura, Y.; Kagawa, K.; Kawahito, S. A sub-100 μm-range-resolution time-of-flight range image sensor with three-tap lock-in pixels, non-overlapping gate clock, and reference plane sampling. IEEE J. Solid-State Circuits 2019, 54, 2291–2303. [Google Scholar] [CrossRef]
- Li, C.; Yin, W.; Zhang, Y. TVAL3: TV Minimization by Augmented Lagrangian and Alternating Direction Algorithms. Available online: https://www.caam.rice.edu/~optimization/L1/TVAL3/ (accessed on 4 January 2022).
- Niclass, C.; Soga, M.; Matsubara, H.; Ogawa, M.; Kagwami, M. A 0.18 μm CMOS SoC for a 100m-range 10fps 200×96-pixel time-of-flight depth sensor. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 17–21 February 2013; pp. 488–489. [Google Scholar]
- Kadambi, A.; Whyte, R.; Bhandari, A.; Streeter, L.; Barsi, C.; Dorrington, A.; Raskar, R. Coded time of flight cameras: Sparse deconvolution to address multipath interference and recover time profiles. ACM Trans. Graph. 2013, 32, 167. [Google Scholar] [CrossRef] [Green Version]
- Heide, F.; Hullin, M.B.; Gregson, J.; Heidrich, W. Low-budget transient imaging using photonic mixer devices. ACM Trans. Graph. 2013, 32, 45. [Google Scholar] [CrossRef]
- Kitano, K.; Okamoto, T.; Tanaka, K.; Aoto, T.; Kubo, H.; Funatomi, T.; Mukaigawa, Y. Recovering temporal PSF using ToF camera with delayed light emission. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 15. [Google Scholar] [CrossRef] [Green Version]
- Mochizuki, F.; Kagawa, K.; Miyagi, R.; Seo, M.-W.; Zhang, B.; Takasawa, T.; Yasutomi, K.; Kawahito, S. Separation of Multi-Path Components in Sweep-Less Time-of-Flight Depth Imaging with a Temporally-Compressive Multi-Aperture Image Sensor. ITE Trans. Media Technol. Appl. 2018, 6, 202–211. [Google Scholar] [CrossRef] [Green Version]
- Bhandari, A.; Kadambi, A.; Whyte, R.; Barsi, C.; Feigin, M.; Dorrington, A.; Raskar, R. Resolving multipath interference in time-of-flight imaging via modulation frequency diversity and sparse regularization. OSA Opt. Lett. 2014, 39, 1705–1708. [Google Scholar] [CrossRef] [PubMed]
- Seo, M.; Shirakawa, Y.; Kawata, Y.; Kagawa, K.; Yasutomi, K.; Kawahito, S. A time-resolved four-tap lock-in pixel CMOS image sensor for real-time fluorescence lifetime imaging microscopy. IEEE J. Solid-State Circuits 2018, 53, 2319–2330. [Google Scholar] [CrossRef]
- Sukegawa, S.; Umebayashi, T.; Nakajima, T.; Kawanobe, H.; Koseki, K.; Hirota, I.; Haruta, T.; Kasai, M.; Fukumoto, K.; Wakano, T.; et al. A 1/4-inch 8Mpixel back-illuminated stacked CMOS image sensor. In Proceedings of the IEEE Int’l Solid-State Circuit Conference (ISSCC), San Francisco, CA, USA, 17–21 February 2013; pp. 484–486. [Google Scholar]
- Hitomi, Y.; Gu, J.; Gupta, M.; Mitsunaga, T.; Nayar, S.K. Video from a single coded exposure photograph using a learned over-complete dictionary. In Proceedings of the Int’l Conf. on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Yoshida, M.; Torii, A.; Okutomi, M.; Endo, K.; Sugiyama, Y.; Taniguchi, R.; Nagahara, H. Joint optimization for compressive video sensing and reconstruction under hardware constraints. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 1–16. [Google Scholar]
- Yasutomi, K.; Inoue, M.; Daikoku, S.; Mars, K.; Kawahito, S. A 4-tap lock-in pixel time-of-flight range imager with substrate biasing and double-delta correlated multiple sampling. In Proceedings of the 2019 International Image Sensor Workshop (IISW), Online, 20–23 September 2021; pp. 65–68. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| This Work | ISSCC’15 [7] | IISW’19 [6] | MDPI Sensors [5] | ISSCC’12 [4] | |
|---|---|---|---|---|---|
| Technology | 0.11 μm CMOS FSI | 0.11 μm CMOS FSI | 0.18 μm CMOS FSI | 0.13 μm CMOS/CCD BSI | 0.18 μm CMOS FSI |
| Chip size | 7.0 mmH × 9.3 mmV | 7.0 mmH × 9.3 mmV | 4.8 mmH × 4.8 mmV | - | 15 mmH × 24 mmV |
| (Macro)pixel size | 22.4 μmH × 22.4 μmV | 11.2 μmH × 5.6 μmV | 70 μmH × 35 μmV | 12.73 μmH × 12.73 μmV | 32 μmH × 32 μmV |
| Effective (sub)pixel count | 212H × 188V | 320H × 324V | 50H × 108V | 576H × 512V | 400H × 250V |
| (Sub)pixel count per macro pixel/aperture | 2H × 2V | 5H × 3V | - | - | - |
| Tap count per (sub)pixel/aperture | 4 | 1 + drain | - | - | - |
| Maximum shutter length | 256b | 128b | - | - | - |
| Number of frames in burst operation | 12@1×, 32@8× | 15@1×, 30@2× | 368 (in-pixel), 184 (off-pixel) | 10 | 248 |
| Maximum burst frame rate | 303 Mfps | 200 Mfps | 100 Mfps (in-pixel), 125 Mfps (off-pixel) | 100 Mfps | 20 Mfps |
| Image readout frame rate | 21 fps | 22 fps | N/A | - | 15 kfps |
| Power consumption | 2.8 W | 1.62 W | N/A | - | 24 W |
| Multiple exposure | Yes | Yes | No | No | No |
| Compatibility with normal optics | Yes | No | Yes | Yes | Yes |
| Conversion gain | 32.5 μV/e− |
| Read noise | 85 e−rms |
| Full-well capacity | 33,000 e− |
| Dark current (average) | 3043 e−/s@room temperature |
| Quantum efficiency | 40.6%@660 nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kagawa, K.; Horio, M.; Pham, A.N.; Ibrahim, T.; Okihara, S.-i.; Furuhashi, T.; Takasawa, T.; Yasutomi, K.; Kawahito, S.; Nagahara, H. A Dual-Mode 303-Megaframes-per-Second Charge-Domain Time-Compressive Computational CMOS Image Sensor. Sensors 2022, 22, 1953. https://doi.org/10.3390/s22051953
Kagawa K, Horio M, Pham AN, Ibrahim T, Okihara S-i, Furuhashi T, Takasawa T, Yasutomi K, Kawahito S, Nagahara H. A Dual-Mode 303-Megaframes-per-Second Charge-Domain Time-Compressive Computational CMOS Image Sensor. Sensors. 2022; 22(5):1953. https://doi.org/10.3390/s22051953
Chicago/Turabian StyleKagawa, Keiichiro, Masaya Horio, Anh Ngoc Pham, Thoriq Ibrahim, Shin-ichiro Okihara, Tatsuki Furuhashi, Taishi Takasawa, Keita Yasutomi, Shoji Kawahito, and Hajime Nagahara. 2022. "A Dual-Mode 303-Megaframes-per-Second Charge-Domain Time-Compressive Computational CMOS Image Sensor" Sensors 22, no. 5: 1953. https://doi.org/10.3390/s22051953