
Robust Adaptive HCS MPPT Algorithm-Based Wind Generation System Using Model Reference Adaptive Control

 , , ,
, , ,
Abstract
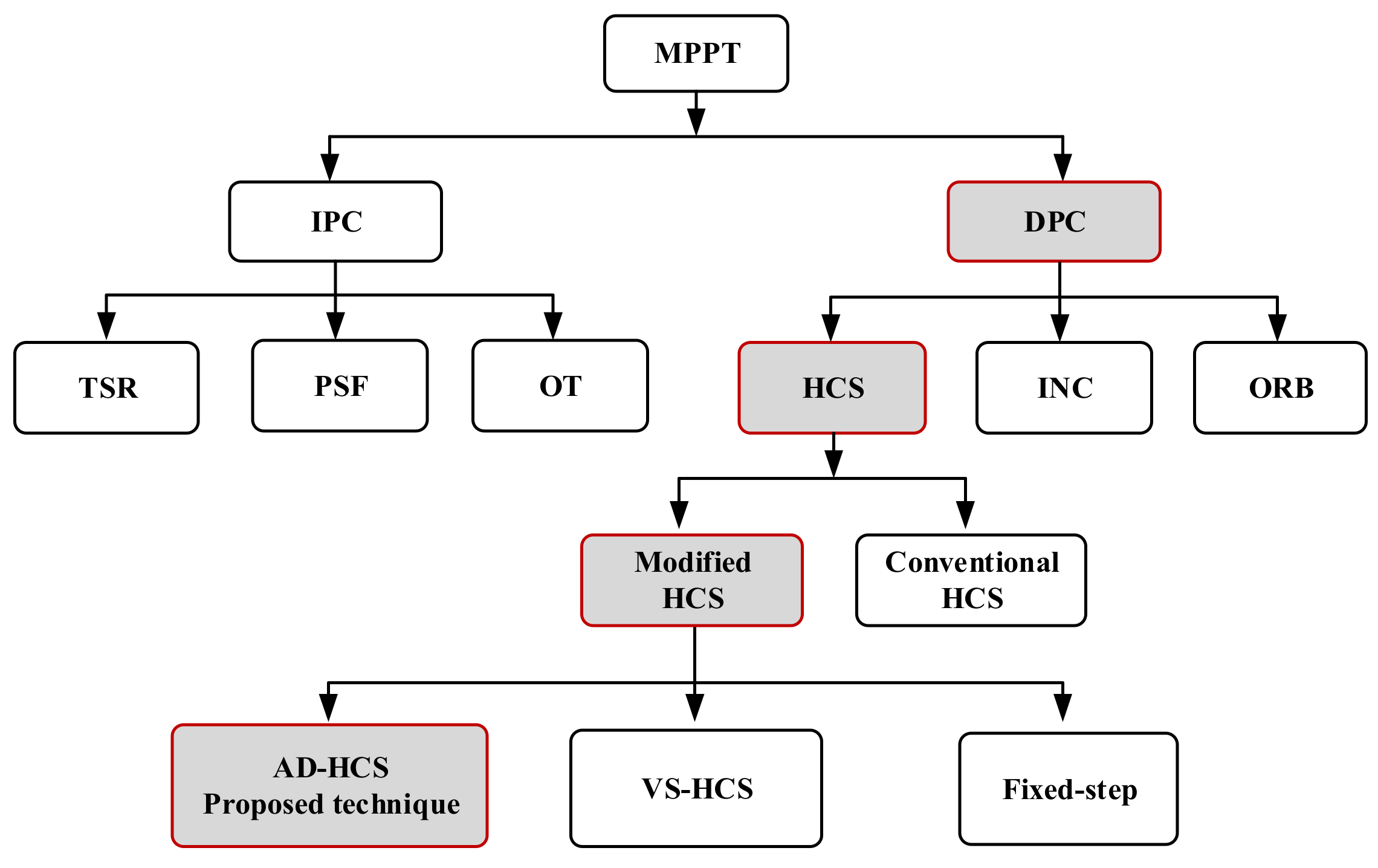
:1. Introduction
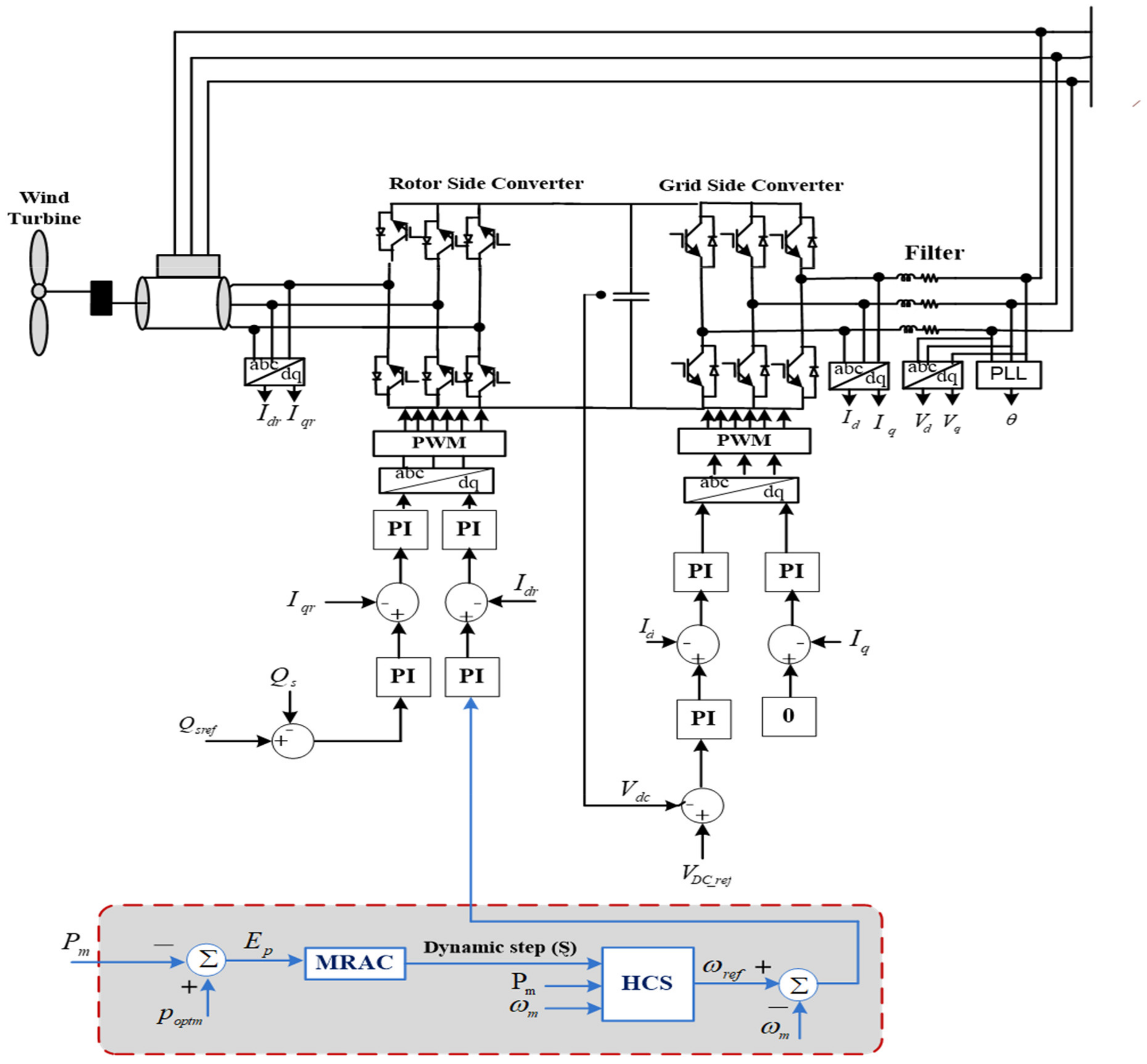
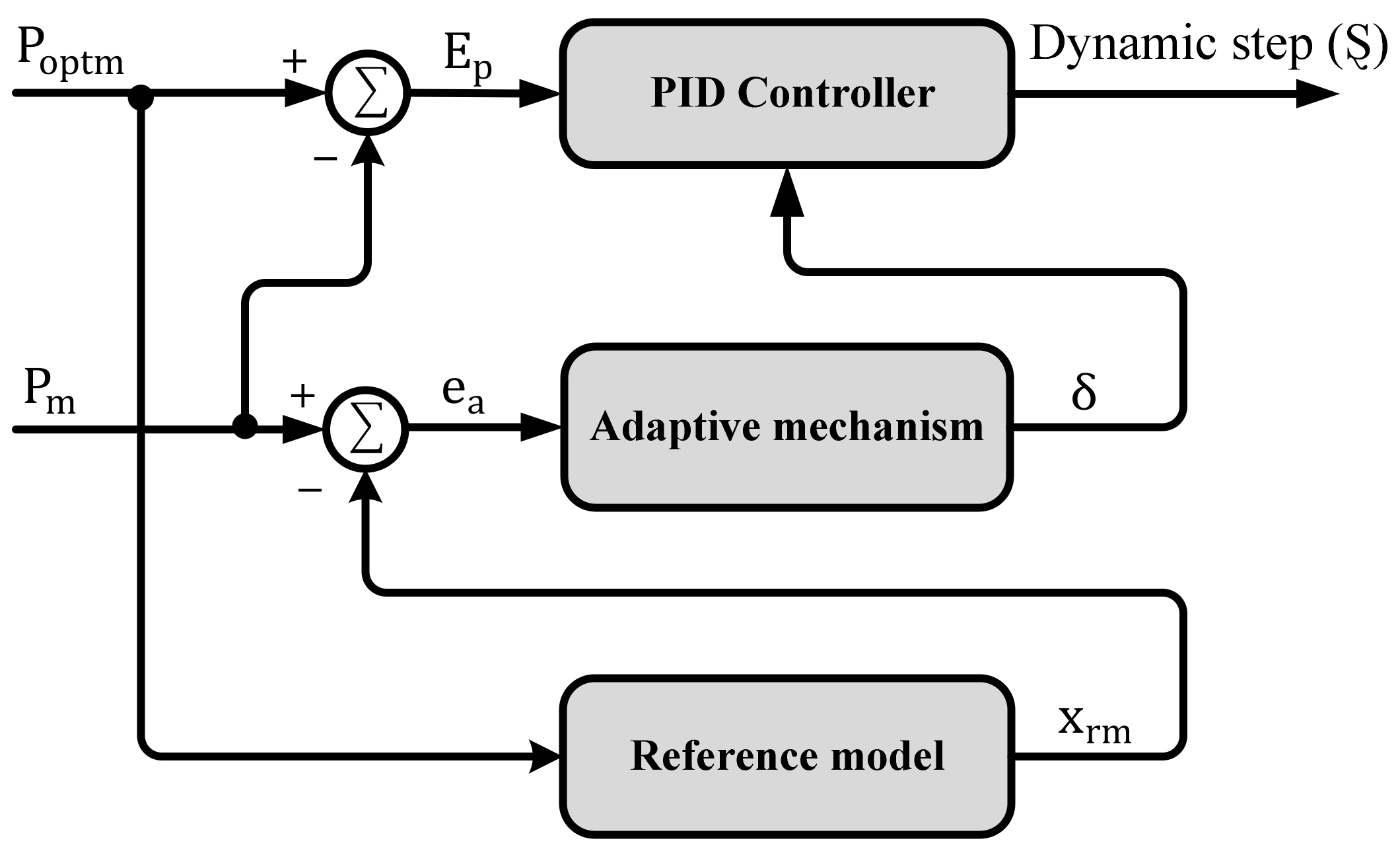
- The suggested algorithm has the ability to regulate rotor speed under different operating conditions by using the model reference adaptive control (MRAC) based on PID.
- Dependent on observing the mechanical power fluctuations, the MRAC continuously tunes the PID gains in order to generate a suitable dynamic step size (Ȿ) until tracking the MPP under the optimal tracking circumstances.
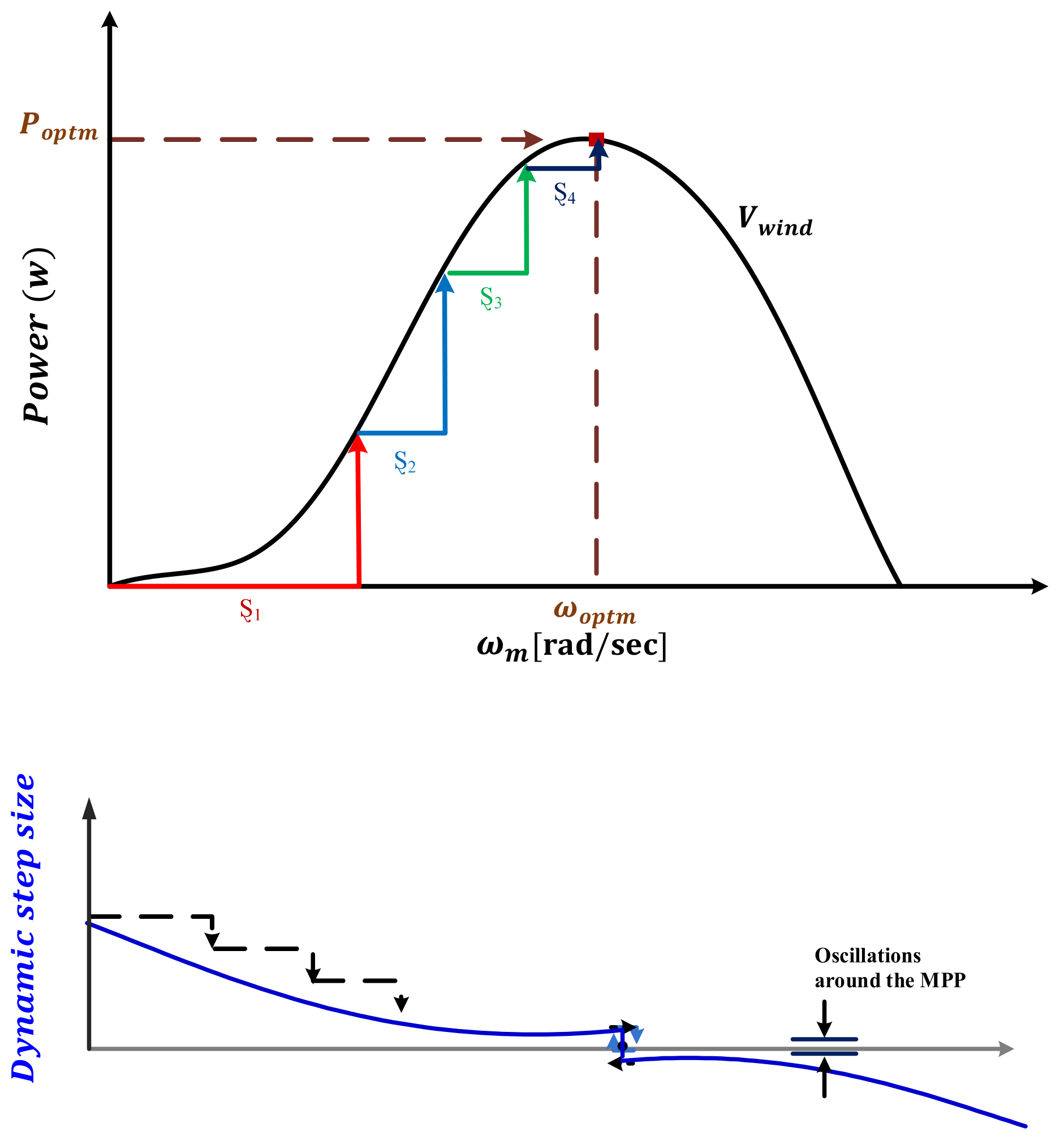
- Regarding the recent HCS techniques, the step size basically depends on predefined constants or objective functions, which makes the choosing of step sizes a complex task. However, the proposed technique is considered as a self-modulation of step size without prior knowledge of system parameters and memory requirements.
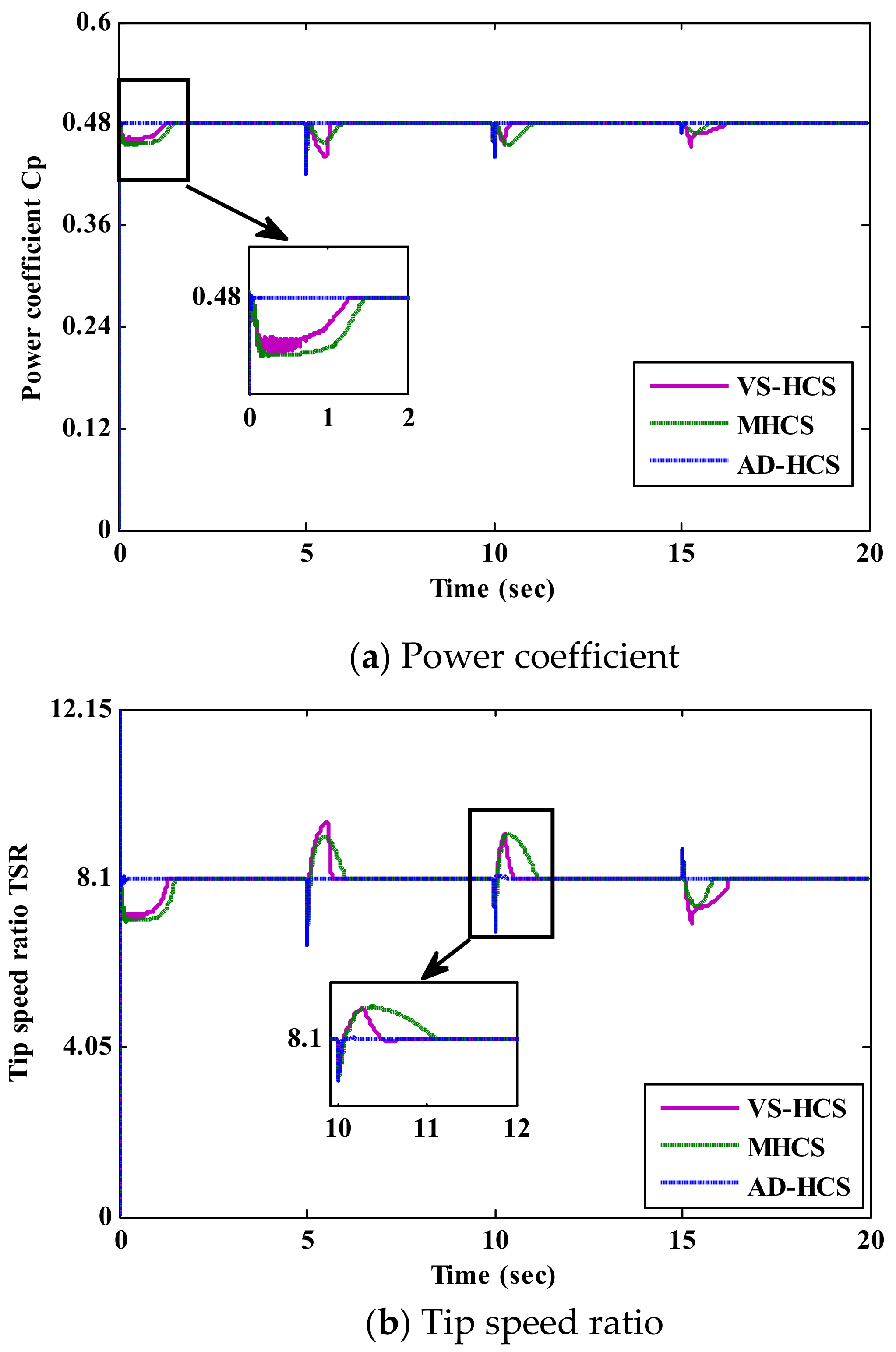
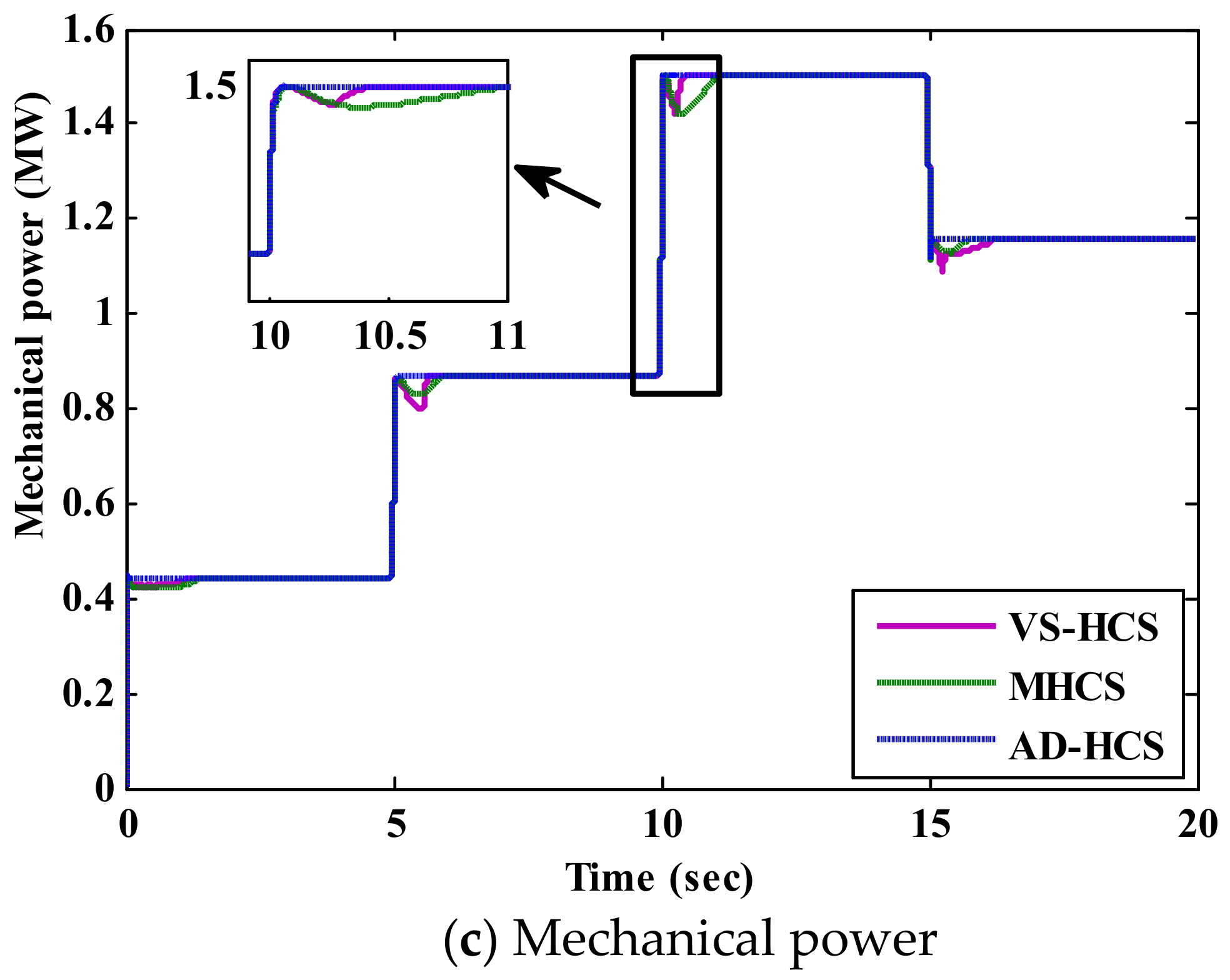
- As a result of applying the proposed technique, the optimum power extraction with high efficiency, low oscillations and fast response compared to existing HCS techniques is attained.
2. Studied Variable-Speed WECS Modeling
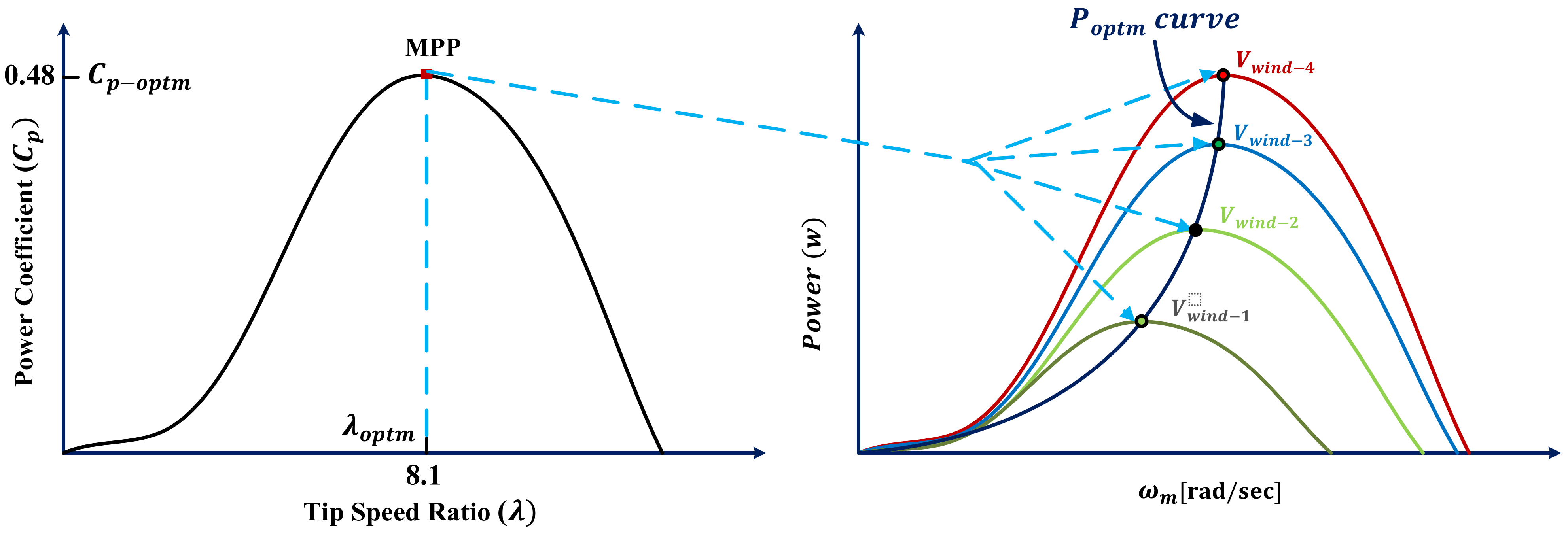
2.1. Aerodynamic Model
2.2. Wind Turbine Model
2.3. Shaft System Modeling
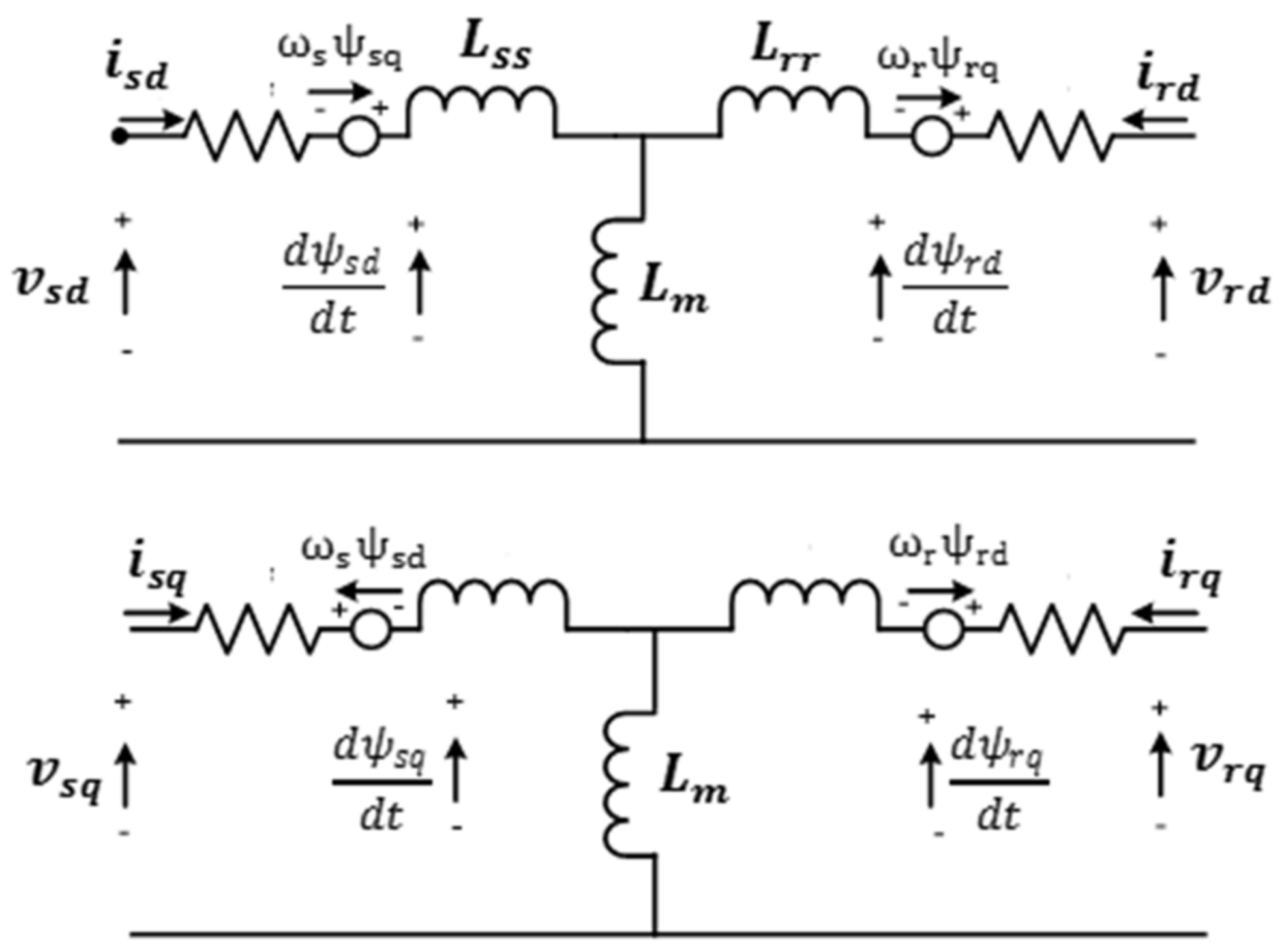
2.4. DFIG Model
2.5. Rotor-Side Converter
2.6. Grid Side Converter
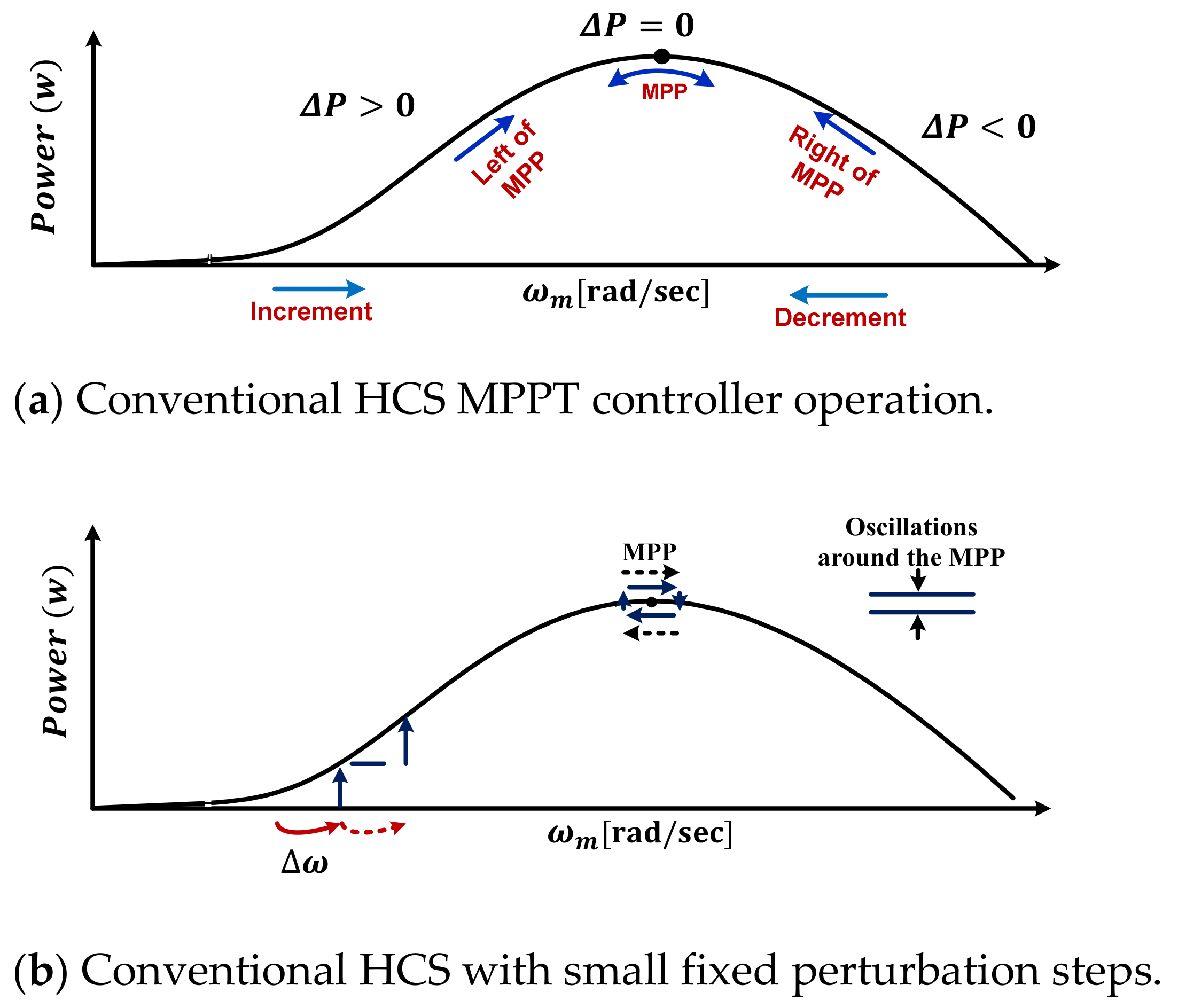
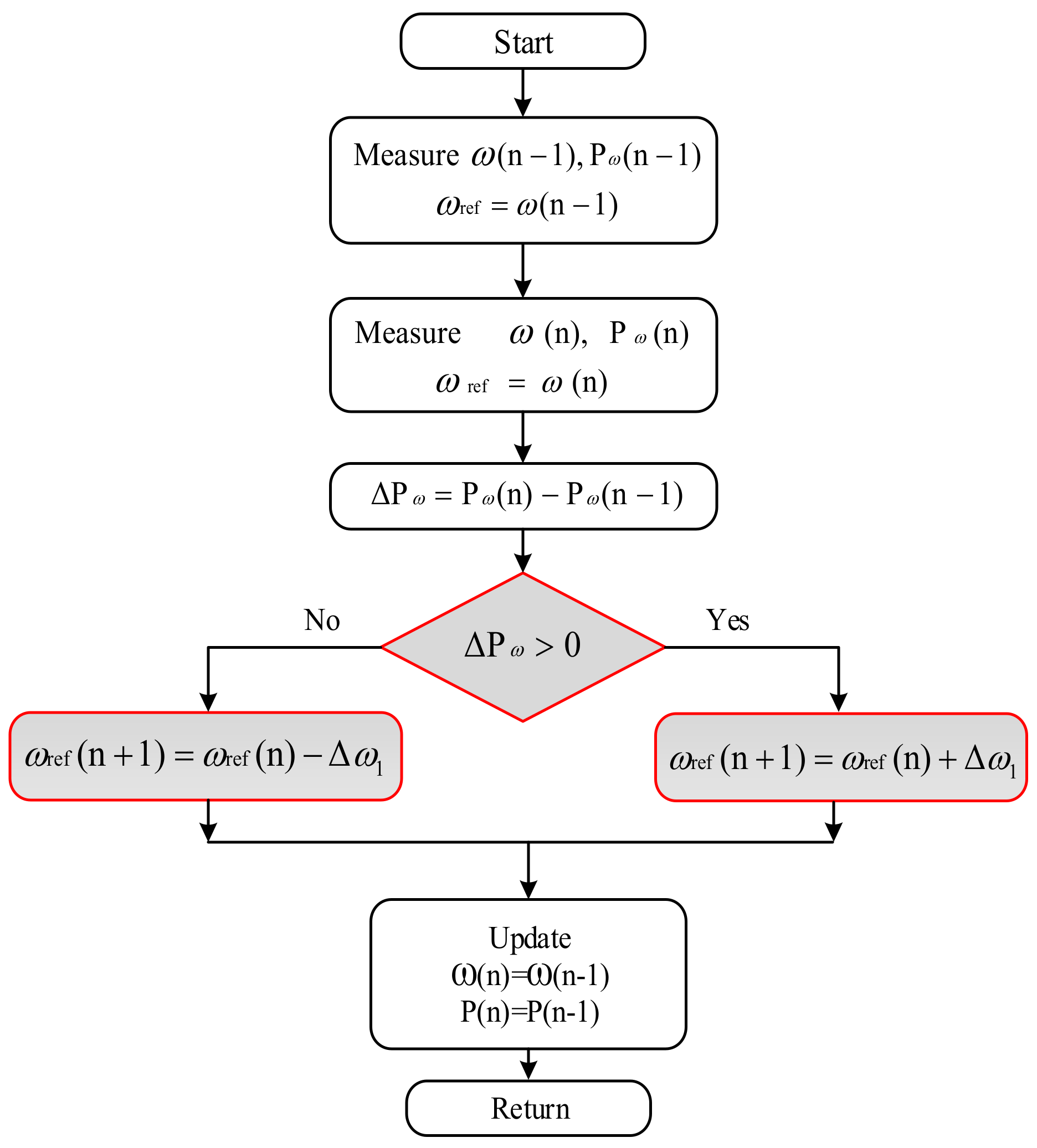
3. Conventional HCS Technique
4. MRAC Strategy
4.1. Description of the Suggested Methodology
4.2. Adjustment of PID Parameters Using MRAC
5. Proposed Adaptive HCS (AD-HCS) Technique
6. Simulation Results
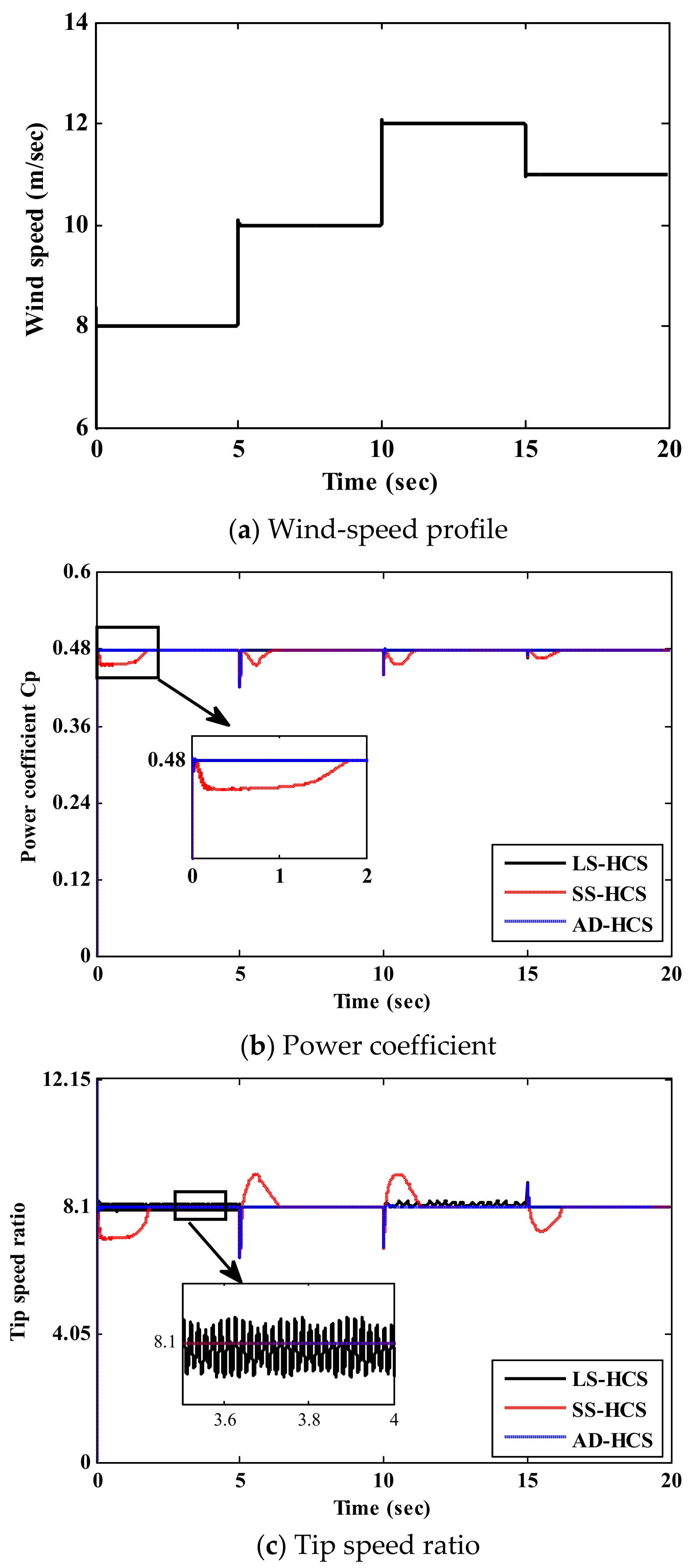
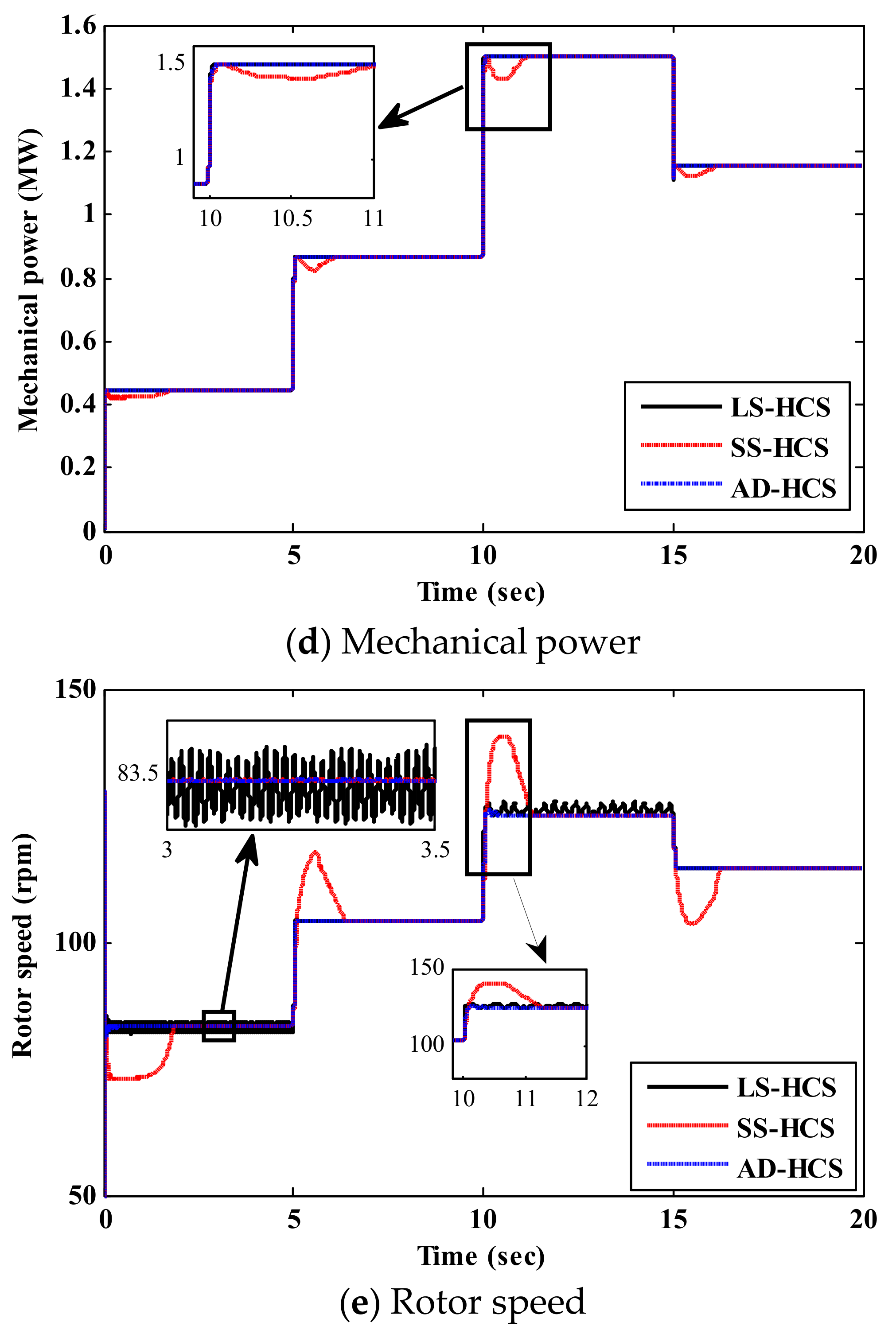
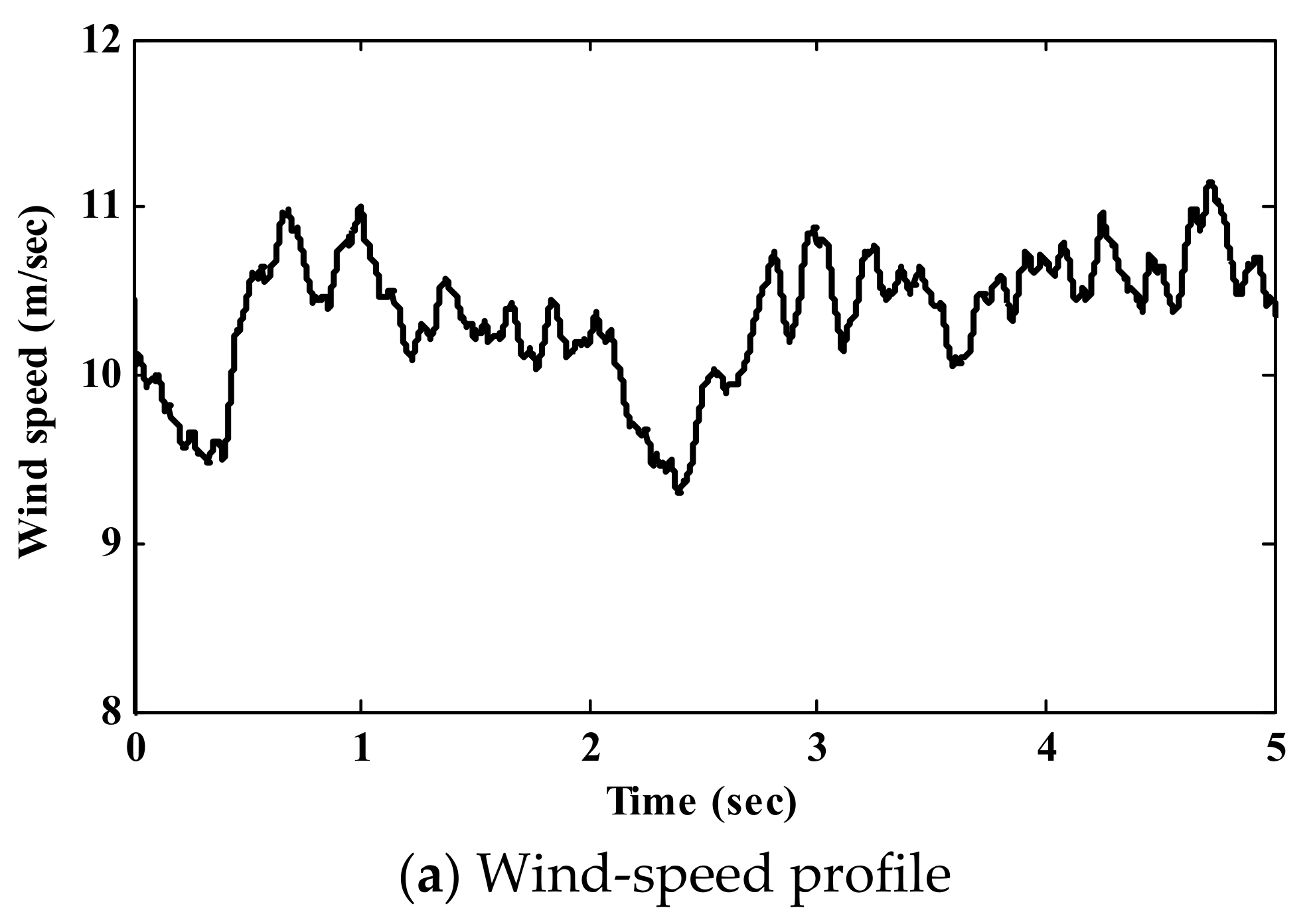
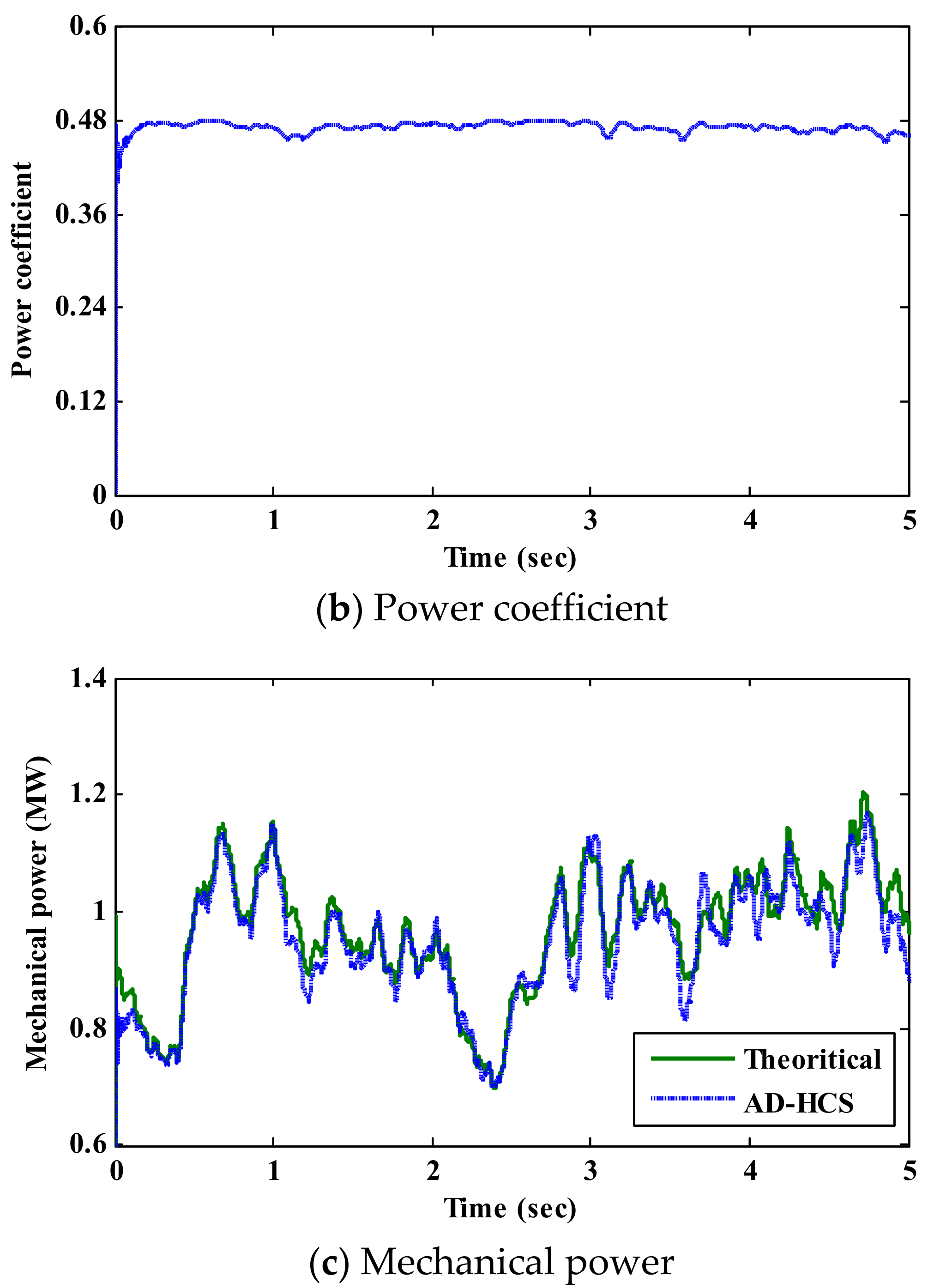
6.1. Step and Random Wind-Speed Change
6.2. Comparative Study
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AD-HCS | Adaptive hill-climbing search |
| BTB | Back-to-back converter |
| DC | Direct current |
| DFIG | Double-fed induction generator |
| DPC | The direct power controller |
| GSC | Grid-side converter |
| HCS | Hill-climbing search |
| INC | Incremental conductance |
| IPC | Indirect power controller |
| LS-HCS | Large step size hill-climbing search |
| MIT | Massachusetts Institute of Technology |
| MRAC | Model reference adaptive control |
| MPP | Maximum power point |
| MPPT | Maximum power point tracking |
| ORB | Optimum relation-based |
| OT | Optimal torque |
| P&O | Perturb and observe |
| PID | Proportional integral derivative controller |
| PSF | Power signal feedback |
| RES | Renewable energy sources |
| RSC | Rotor-side converter |
| SS-HCS | Small step size hill-climbing search |
| TSR | Tip speed ratio |
| VS-HCS | Variable step size hill-climbing search |
| WECS | Wind energy conversion system |
| WT | Wind turbine |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification of Wind Turbine | |
|---|---|
| The coefficients C1 to C6 | ,, , , , |
| Blade radius | |
| Air density | |
| The optimal tip speed ratio | |
| Maximum power coefficient | |
| DFIG parameters | |
| Rated power | |
| Pole pairs number | |
| Stator resistance | |
| Stator inductance | |
| Moment of inertia | |
| Mutual inductance | |
| DC bus and gird parameters | |
| DC-link voltage | |
| The capacitor of the DC-link | |
| Grid voltage | |
| Grid frequency | |
| Grid resistance | |
| Grid inductance | |
References
- Mousa, H.H.; Youssef, A.-R.; Mohamed, E.E. Optimal power extraction control schemes for five-phase PMSG based wind generation systems. Eng. Sci. Technol. Int. J. 2020, 23, 144–155. [Google Scholar] [CrossRef]
- Hemeyine, A.; Abbou, A.; Bakouri, A.; Mokhlis, M.; El Moustapha, S. A Robust Interval Type-2 Fuzzy Logic Controller for Variable Speed Wind Turbines Based on a Doubly Fed Induction Generator. Inventions 2021, 6, 21. [Google Scholar] [CrossRef]
- Wierzbowski, M.; Lyzwa, W.; Musial, I. MILP model for long-term energy mix planning with consideration of power system reserves. Appl. Energy 2016, 169, 93–111. [Google Scholar] [CrossRef] [Green Version]
- Song, S.; Guan, P.; Liu, B.; Lu, Y.; Goh, H. Impedance Modeling and Stability Analysis of DFIG-Based Wind Energy Conversion System Considering Frequency Coupling. Energies 2021, 14, 3243. [Google Scholar] [CrossRef]
- Menezes, E.J.N.; Araújo, A.M.; da Silva, N.S.B. A review on wind turbine control and its associated methods. J. Clean. Prod. 2018, 174, 945–953. [Google Scholar] [CrossRef]
- Mousa, H.H.; Youssef, A.-R.; Mohamed, E.E. State of the art perturb and observe MPPT algorithms based wind energy conversion systems: A technology review. Int. J. Electr. Power Energy Syst. 2021, 126, 106598. [Google Scholar] [CrossRef]
- Dursun, E.H.; Koyuncu, H.; Kulaksiz, A.A. A novel unified maximum power extraction framework for PMSG based WECS using chaotic particle swarm optimization derivatives. Eng. Sci. Technol. Int. J. 2021, 24, 158–170. [Google Scholar] [CrossRef]
- Song, D.; Yang, J.; Cai, Z.; Dong, M.; Su, M.; Wang, Y. Wind estimation with a non-standard extended Kalman filter and its application on maximum power extraction for variable speed wind turbines. Appl. Energy 2017, 190, 670–685. [Google Scholar] [CrossRef]
- Dekali, Z.; Baghli, L.; Boumediene, A. Indirect power control for a Grid Connected Double Fed Induction Generator Based Wind Turbine Emulator. In Proceedings of the 2019 International Conference on Advanced Electrical Engineering (ICAEE), Dhaka, Bangladesh, 26–28 September 2019; pp. 1–6. [Google Scholar]
- Ananth, D.; Kumar, G. Tip Speed Ratio Based MPPT Algorithm and Improved Field Oriented Control for Extracting Optimal Real Power and Independent Reactive Power Control for Grid Connected Doubly Fed Induction Generator. Int. J. Electr. Comput. Eng. 2016, 6, 1319. [Google Scholar]
- Babu, P.S.; Sundarabalan, C.; Balasundar, C.; Krishnan, T.S. Fuzzy logic based optimal tip speed ratio MPPT controller for grid connected WECS. Mater. Today Proc. 2021, 45, 2544–2550. [Google Scholar] [CrossRef]
- Pagnini, L.C.; Burlando, M.; Repetto, M.P. Experimental power curve of small-size wind turbines in turbulent urban environment. Appl. Energy 2015, 154, 112–121. [Google Scholar] [CrossRef]
- Hua, G.; Geng, Y. A Novel Control Strategy of MPPT Taking Dynamics of Wind Turbine into Account. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Ganjefar, S.; Ghassemi, A.A.; Ahmadi, M.M. Improving efficiency of two-type maximum power point tracking methods of tip-speed ratio and optimum torque in wind turbine system using a quantum neural network. Energy 2014, 67, 444–453. [Google Scholar] [CrossRef]
- Saidi, Y.; Mezouar, A.; Miloud, Y.; Brahmi, B.; Kerrouche, K.D.E.; Benmahdjoub, M.A. Adaptive Maximum Power Control Based on Optimum Torque Method for Wind Turbine by Using Fuzzy-Logic Adaption Mechanisms during Partial Load Operation. Period. Polytech. Electr. Eng. Comput. Sci. 2020, 64, 170–178. [Google Scholar] [CrossRef] [Green Version]
- Youssef, A.; Ali, A.I.; Saeed, M.S.; Mohamed, E.E. Advanced multi-sector P&O maximum power point tracking technique for wind energy conversion system. Int. J. Electr. Power Energy Syst. 2019, 107, 89–97. [Google Scholar] [CrossRef]
- Ali, A.I.; Sayed, M.A.; Mohamed, E.E. Modified efficient perturb and observe maximum power point tracking technique for grid-tied PV system. Int. J. Electr. Power Energy Syst. 2018, 99, 192–202. [Google Scholar] [CrossRef]
- Aourir, J.; Locment, F. Limited Power Point Tracking for a Small-Scale Wind Turbine Intended to Be Integrated in a DC Microgrid. Appl. Sci. 2020, 10, 8030. [Google Scholar] [CrossRef]
- Abdullah, M.; Yatim, A.H.; Tan, C.; Saidur, R. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar] [CrossRef]
- Yu, K.N.; Liao, C.K. Applying novel fractional order incremental conductance algorithm to design and study the maximum power tracking of small wind power systems. J. Appl. Res. Technol. 2015, 13, 238–244. [Google Scholar] [CrossRef] [Green Version]
- Shang, L.; Guo, H.; Zhu, W. An improved MPPT control strategy based on incremental conductance algorithm. Prot. Control. Mod. Power Syst. 2020, 5, 1–8. [Google Scholar] [CrossRef]
- Linus, R.M.; Damodharan, P. Maximum power point tracking method using a modified perturb and observe algorithm for grid connected wind energy conversion systems. IET Renew. Power Gener. 2015, 9, 682–689. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Zhang, X.; Qu, K.; Jiang, L. Democratic joint operations algorithm for optimal power extraction of PMSG based wind energy conversion system. Energy Convers. Manag. 2018, 159, 312–326. [Google Scholar] [CrossRef]
- Uddin, M.N.; Amin, I.K. Adaptive Step Size Based Hill-Climb Search Algorithm for MPPT Control of DFIG-WECS With Reduced Power Fluctuation and Improved Tracking Performance. Electr. Power Components Syst. 2018, 46, 2203–2214. [Google Scholar] [CrossRef]
- Mousa Hossam, H.H.; Youssef, A.-R.; Mohamed Essam, E.M. Improved Perturb and Observe MPPT Algorithm of Multi-Phase PMSG Based Wind Energy Conversion System. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt,, 17–19 December 2019. [Google Scholar]
- Kumar, D.; Chatterjee, K. A review of conventional and advanced MPPT algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2016, 55, 957–970. [Google Scholar] [CrossRef]
- Dalala, Z.; Zahid, Z.U.; Yu, W.; Cho, Y.; Lai, J. Design and Analysis of an MPPT Technique for Small-Scale Wind Energy Conversion Systems. IEEE Trans. Energy Convers. 2013, 28, 756–767. [Google Scholar] [CrossRef]
- Kortabarria, I.; Andreu, J.; de Alegría, I.M.; Jiménez, J.; Gárate, J.I.; Robles, E. A novel adaptative maximum power point tracking algorithm for small wind turbines. Renew. Energy 2014, 63, 785–796. [Google Scholar] [CrossRef]
- Ahmed, R.; Namaane, A.; M’Sirdi, N.K. Improvement in Perturb and Observe Method Using State Flow Approach. Energy Procedia 2013, 42, 614–623. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.M.; Youssef, A.; Ali, A.S.; Abdel-Jaber, G. Variable step size PO MPPT algorithm using model reference adaptive control for optimal power extraction. Int. Trans. Electr. Energy Syst. 2020, 30, 12151. [Google Scholar] [CrossRef]
- González, L.G.; Figueres, E.; Garcera, G.; Carranza, O. Maximum-power-point tracking with reduced mechanical stress applied to wind-energy-conversion-systems. Appl. Energy 2010, 87, 2304–2312. [Google Scholar] [CrossRef] [Green Version]
- Hong, Y.-Y.; Lu, S.-D.; Chiou, C.-S. MPPT for PM wind generator using gradient approximation. Energy Convers. Manag. 2009, 50, 82–89. [Google Scholar] [CrossRef]
- Agarwal, V.; Aggarwal, R.K.; Patidar, P.; Patki, C. A Novel Scheme for Rapid Tracking of Maximum Power Point in Wind Energy Generation Systems. IEEE Trans. Energy Convers. 2010, 25, 228–236. [Google Scholar] [CrossRef]
- Putri, R.I.; Pujiantara, M.; Priyadi, A.; Ise, T.; Purnomo, M.H. Maximum power extraction improvement using sensorless controller based on adaptive perturb and observe algorithm for PMSG wind turbine application. IET Electr. Power Appl. 2018, 12, 455–462. [Google Scholar] [CrossRef]
- Kazmi, S.M.R.; Goto, H.; Guo, H.-J.; Ichinokura, O. A Novel Algorithm for Fast and Efficient Speed-Sensorless Maximum Power Point Tracking in Wind Energy Conversion Systems. IEEE Trans. Ind. Electron. 2011, 58, 29–36. [Google Scholar] [CrossRef]
- Xia, Y.; Ahmed, K.H.; Williams, B.W. Wind Turbine Power Coefficient Analysis of a New Maximum Power Point Tracking Technique. IEEE Trans. Ind. Electron. 2013, 60, 1122–1132. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Y.; Qiao, W.; Qu, L. A space-vector-modulated sensorless direct-torque control for direct-drive PMSG wind turbines. IEEE Trans. Ind. Appl. 2014, 50, 2331–2341. [Google Scholar] [CrossRef]
- Singh, M.; Khadkikar, V.; Chandra, A. Grid synchronisation with harmonics and reactive power compensation capability of a permanent magnet synchronous generator-based variable speed wind energy conversion system. IET Power Electron. 2011, 4, 122. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Chang, L. An Intelligent Maximum Power Extraction Algorithm for Inverter-Based Variable Speed Wind Turbine Systems. IEEE Trans. Power Electron. 2004, 19, 1242–1249. [Google Scholar] [CrossRef]
- Azzouz, M.A.; Elshafei, A.-L.; Emara, H.M. Evaluation of fuzzy-based maximum power-tracking in wind energy conversion systems. IET Renew. Power Gener. 2011, 5, 422. [Google Scholar] [CrossRef] [Green Version]
- Calderaro, V.; Galdi, V.; Piccolo, A.; Siano, P. A fuzzy controller for maximum energy extraction from variable speed wind power generation systems. Electr. Power Syst. Res. 2008, 78, 1109–1118. [Google Scholar] [CrossRef]
- Chedid, R.; Mrad, F.; Basma, M. Intelligent control of a class of wind energy conversion systems. IEEE Trans. Energy Convers. 1999, 14, 1597–1604. [Google Scholar] [CrossRef]
- Higuchi, Y.; Yamamura, N.; Ishida, M.; Hori, T. An improvement of performance for small-scaled wind power generating system with permanent magnet type synchronous generator. In Proceedings of the 2000 26th Annual Conference of the IEEE Industrial Electronics Society. IECON 2000. 2000 IEEE International Conference on Industrial Electronics, Control and Instrumentation. 21st Century Technologies, Nagoya, Japan, 22–28 October 2002; Volume 2, pp. 1037–1043. [Google Scholar]
- Mousa, H.H.; Youssef, A.-R.; Mohamed, E.E. Adaptive P&O MPPT algorithm based wind generation system using realistic wind fluctuations. Int. J. Electr. Power Energy Syst. 2019, 112, 294–308. [Google Scholar] [CrossRef]
- Youssef, A.-R.; Mousa, H.H.; Mohamed, E.E. Development of self-adaptive P&O MPPT algorithm for wind generation systems with concentrated search area. Renew. Energy 2020, 154, 875–893. [Google Scholar] [CrossRef]
- Mousa, H.H.; Youssef, A.-R.; Mohamed, E.E. Hybrid and adaptive sectors P&O MPPT algorithm based wind generation system. Renew. Energy 2020, 145, 1412–1429. [Google Scholar] [CrossRef]
- Mousa, H.H.H.; Youssef, A.-R.; Hamdan, I.; Ahamed, M.; Mohamed, E.E.M. Performance Assessment of Robust P&O Algorithm Using Optimal Hypothetical Position of Generator Speed. IEEE Access 2021, 9, 30469–30485. [Google Scholar] [CrossRef]
- Rezaei, M.M. A nonlinear maximum power point tracking technique for DFIG-based wind energy conversion systems. Eng. Sci. Technol. Int. J. 2018, 21, 901–908. [Google Scholar] [CrossRef]
- Ali, M.M.; Youssef, A.R.; Ali, A.S.; Abdel-Jaber, G.T. Comparative study of different pitch angle control strategies for DFIG based on wind energy conversion system. Int. J. Renew. Energy Res. (IJRER) 2019, 9, 157–163. [Google Scholar]
- Ali, M.M.M.; Youssef, A.; Abdel-Gaber, G.; Ali, A.S. Adaptive Fuzzy-PID Based Pitch Angle Control of Wind Turbine. In Proceedings of the 2018 Twentieth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; pp. 1110–1114. [Google Scholar]
- Yang, B.; Jiang, L.; Wang, L.; Yao, W.; Wu, Q. Nonlinear maximum power point tracking control and modal analysis of DFIG based wind turbine. Int. J. Electr. Power Energy Syst. 2016, 74, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Sleiman, M.; Kedjar, B.; Hamadi, A.; Al-Haddad, K.; Kanaan, H.Y.; Sleiman, M.; Hamadi, A. Modeling, control and simulation of DFIG for maximum power point tracking. In Proceedings of the 2013 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013; pp. 1–6. [Google Scholar]
- Parida, A.; Chatterjee, D. An improved control scheme for grid connected doubly fed induction generator considering wind-solar hybrid system. Int. J. Electr. Power Energy Syst. 2016, 77, 112–122. [Google Scholar] [CrossRef]
- Pirabakaran, K.; Becerra, V. Automatic tuning of PID controllers using model reference adaptive control techniques. In Proceedings of the IECON’01. 27th Annual Conference of the IEEE Industrial Electronics Society (Cat. No.37243), Denver, CO, USA, 29 November–2 December 2001; Volume 1, pp. 736–740. [Google Scholar]
- Mayr, C. PID Controller Design. In Stability Analysis and Controller Design of Local Model Networks; Mayr, C., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2021; pp. 69–97. [Google Scholar]
- Kavuran, G.; ALAGOZ, B.B.; Abdullah, A.T.; Yeroglu, C. Implementation of model reference adaptive controller with fractional order adjustment rules for coaxial rotor control test system. Balk. J. Electr. Comput. Eng. 2016, 4, 84–88. [Google Scholar]
- Zuo, X.; Liu, J.-W.; Wang, X.; Liang, H.-Q. Adaptive PID and Model Reference Adaptive Control Switch Controller for Nonlinear Hydraulic Actuator. Math. Probl. Eng. 2017, 2017, 6970146. [Google Scholar] [CrossRef] [Green Version]
- Mushiri, T.; Mahachi, A.; Mbohwa, C. A Model Reference Adaptive Control (MRAC) System for the Pneumatic Valve of the Bottle Washer in Beverages Using Simulink. Procedia Manuf. 2017, 7, 364–373. [Google Scholar] [CrossRef]
- Wu, G.-Q.; Wu, S.-N.; Bai, Y.-G.; Liu, L. Experimental Studies on Model Reference Adaptive Control with Integral Action Employing a Rotary Encoder and Tachometer Sensors. Sensors 2013, 13, 4742–4759. [Google Scholar] [CrossRef] [PubMed]
- Bejarbaneh, E.Y.; Ahangarnejad, A.H.; Bagheri, A.; Pham, B.T.; Buyamin, S.; Shirinzadeh, F. Optimal design of adaptive and proportional integral derivative controllers using a novel hybrid particle swarm optimization algorithm. Trans. Inst. Meas. Control. 2020, 42, 1492–1510. [Google Scholar] [CrossRef]
- Gopi, R.; Srinivasan, S.; Panneerselvam, K.; Teekaraman, Y.; Kuppusamy, R.; Urooj, S. Enhanced Model Reference Adaptive Control Scheme for Tracking Control of Magnetic Levitation System. Energies 2021, 14, 1455. [Google Scholar] [CrossRef]
- Mousa, H.H.; Youssef, A.R.; Mohamed, E.E. Study of robust adaptive step-sizes P&O MPPT algorithm for high-inertia WT with direct-driven multiphase PMSG. Int. Trans. Electr. Energy Syst. 2019, 29, e12090. [Google Scholar]
- Mousa, H.H.; Youssef, A.-R.; Mohamed, E.E. Variable step size P&O MPPT algorithm for optimal power extraction of multi-phase PMSG based wind generation system. Int. J. Electr. Power Energy Syst. 2019, 108, 218–231. [Google Scholar] [CrossRef]
- Liu, Y.; Lin, J.; Wu, Q.H.; Zhou, X. Frequency Control of DFIG based Wind Power Penetrated Power Systems Using Switching Angle Controller and AGC. IEEE Trans. Power Syst. 2016, 32, 1. [Google Scholar] [CrossRef] [Green Version]















| Ref. | Details |
|---|---|
| [35] | This paper deals with the most common problems in HCS techniques such as speed–efficiency trade-off and wrong perturbation direction with fast fluctuations of wind speed. It follows the MPP contingent on an accurate value of , which is updated according to wind fluctuations. However, it is not possible to correctly track the MPP, as this technique necessitates measuring the wind speed to calculate . |
| [36] | The relationship between the current and the square voltage of the DC-link is the basic idea for this technique, which enhances the system efficiency by 7.8%. On the other hand, the efficiency enhancement required offline training. |
| [37] | This tracking strategy via the sliding-mode controller has high efficiency under wind speed variations. Conversely, system modeling must be known. |
| [38] | The power lookup-table technique against speed characteristics was employed to obtain the MPP based on the field-oriented control. Furthermore, the unique decreases tracking efficiency. |
| [39] | Authors investigated a modified HCS algorithm that considered the WT inertia. However, it requires a lookup table and powerful memory which depends on the WECS parameters |
| [40,41,42] | Intelligent MPPT techniques were created, mainly based on fuzzy logic control. However, these intelligent methods for extracting MPP require a considerable time interval (processing time) for hardware implementation. |
| [43] | The fixed perturbation steps were replaced by sinusoidal steps in the suggested HCS technique. This strategy is qualified for functioning efficiently only at fixed and slowly changing wind speeds. Moreover, it slows down the convergence speed. |
| [44] | A novel fast and efficient variable-step HCS technique was suggested; it divides the operating zone into modular operating zones by comparing a special synthesized ratio with the precise value. This method provides a vital solution; however, it uses a constant step size in each zone. |
| [45,46,47] | Recent P&O algorithms were investigated depending on the variation in step size with prior knowledge of system parameters and memory requirements. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alrowaili, Z.A.; Ali, M.M.; Youssef, A.; Mousa, H.H.H.; Ali, A.S.; Abdel-Jaber, G.T.; Ezzeldien, M.; Gami, F. Robust Adaptive HCS MPPT Algorithm-Based Wind Generation System Using Model Reference Adaptive Control. Sensors 2021, 21, 5187. https://doi.org/10.3390/s21155187
Alrowaili ZA, Ali MM, Youssef A, Mousa HHH, Ali AS, Abdel-Jaber GT, Ezzeldien M, Gami F. Robust Adaptive HCS MPPT Algorithm-Based Wind Generation System Using Model Reference Adaptive Control. Sensors. 2021; 21(15):5187. https://doi.org/10.3390/s21155187
Chicago/Turabian StyleAlrowaili, Ziyad A., Mustafa M. Ali, Abdelraheem Youssef, Hossam H. H. Mousa, Ahmed S. Ali, Gamal T. Abdel-Jaber, Mohammed Ezzeldien, and Fatma Gami. 2021. "Robust Adaptive HCS MPPT Algorithm-Based Wind Generation System Using Model Reference Adaptive Control" Sensors 21, no. 15: 5187. https://doi.org/10.3390/s21155187