Numerical Investigation of Auxetic Textured Soft Strain Gauge for Monitoring Animal Skin

 , , , and
, , , and
Abstract
:1. Introduction
2. Background
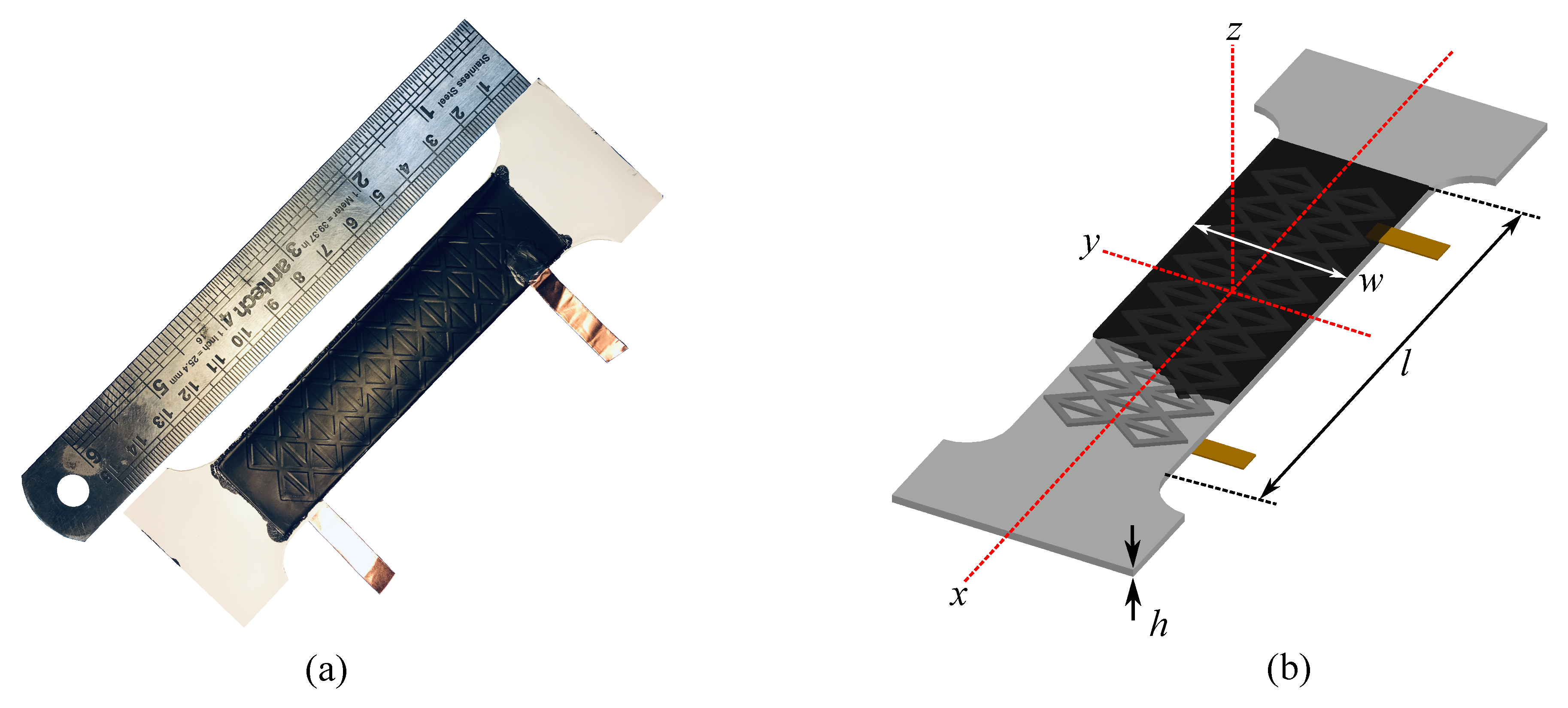
2.1. Soft Elastomeric Capacitor
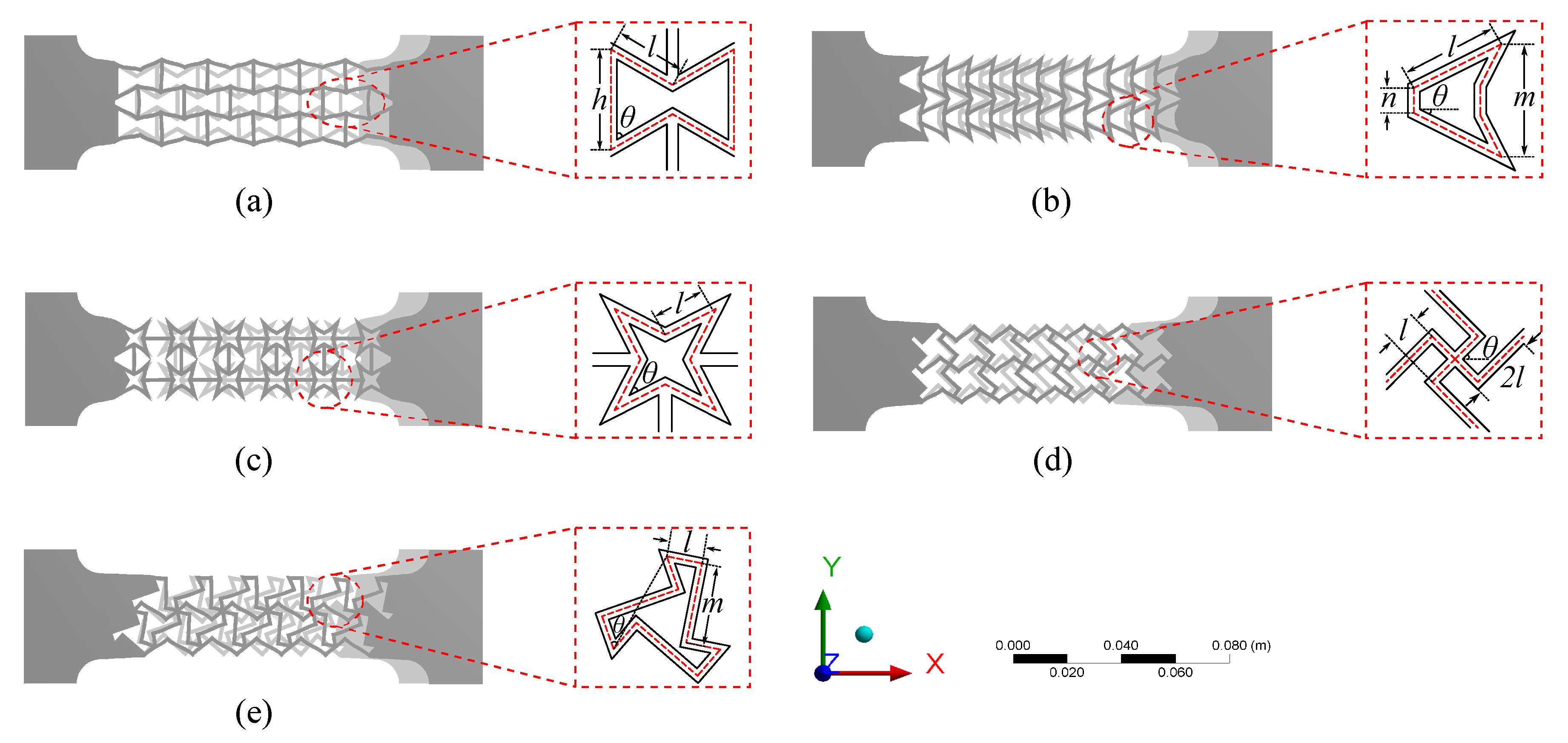
2.2. Design of Auxetic Structures
- Re-entrant hexagonal honeycomb (Pattern A)
- Re-entrant triangular-shaped honeycomb (Pattern B)
- Re-entrant 4-star system (Pattern C)
- Chiral truss (Pattern D)
- Zigzag triangular network (Pattern E)
3. Methodology
3.1. Numerical Models
- SEC Sensor Model
- SEC-Animal Skin Model
- Boundary Conditions
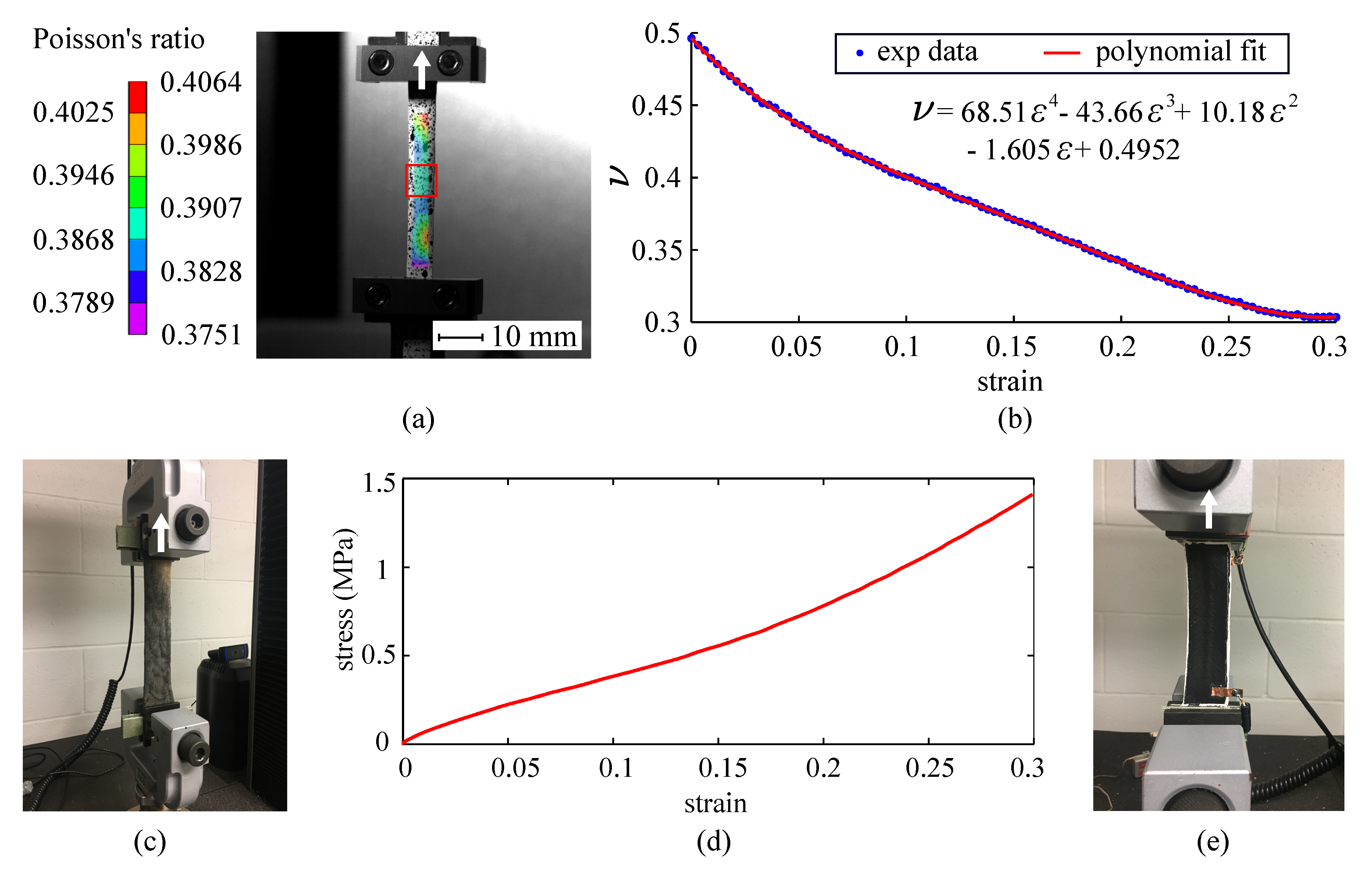
3.2. Experimental Tests
4. Results and Discussion
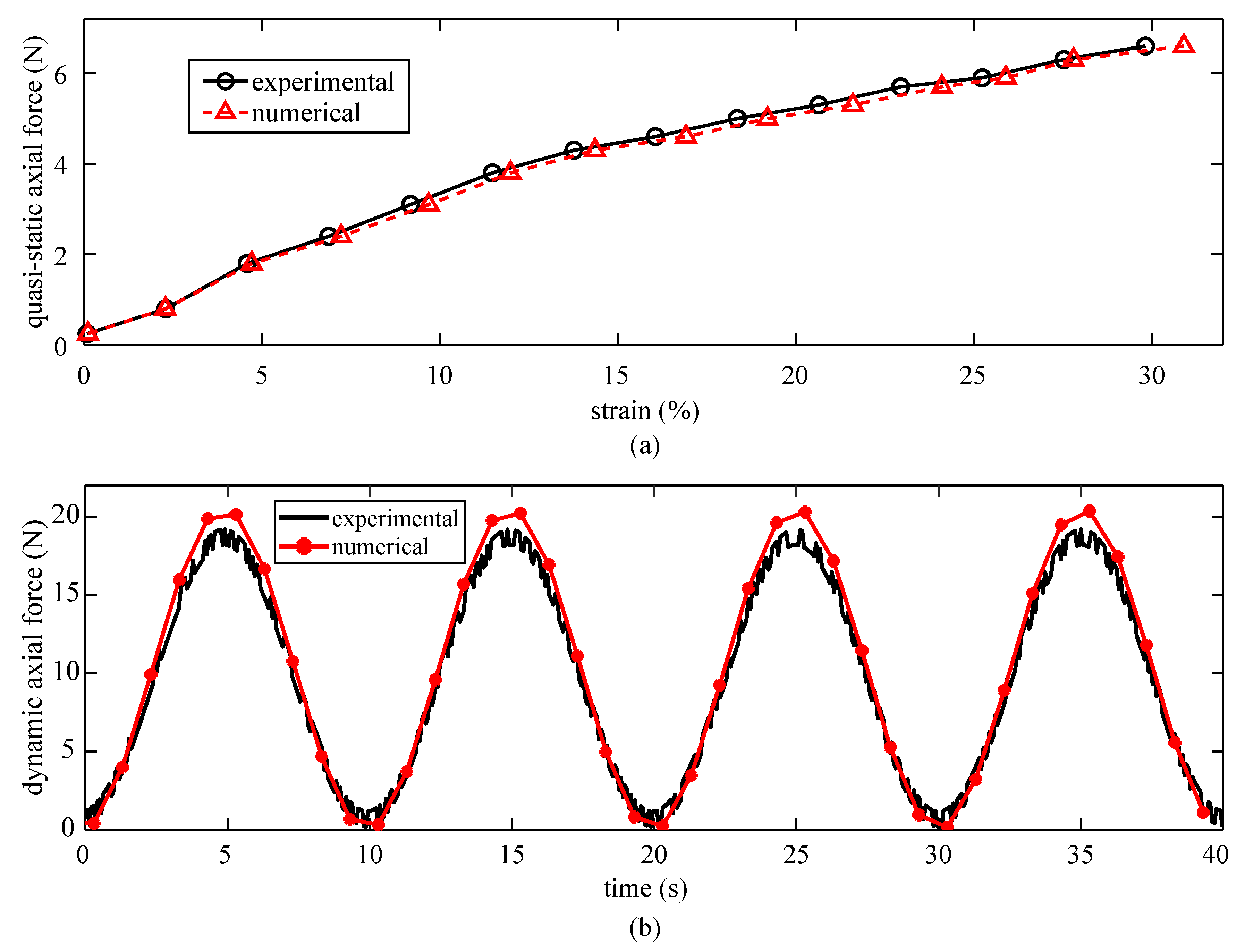
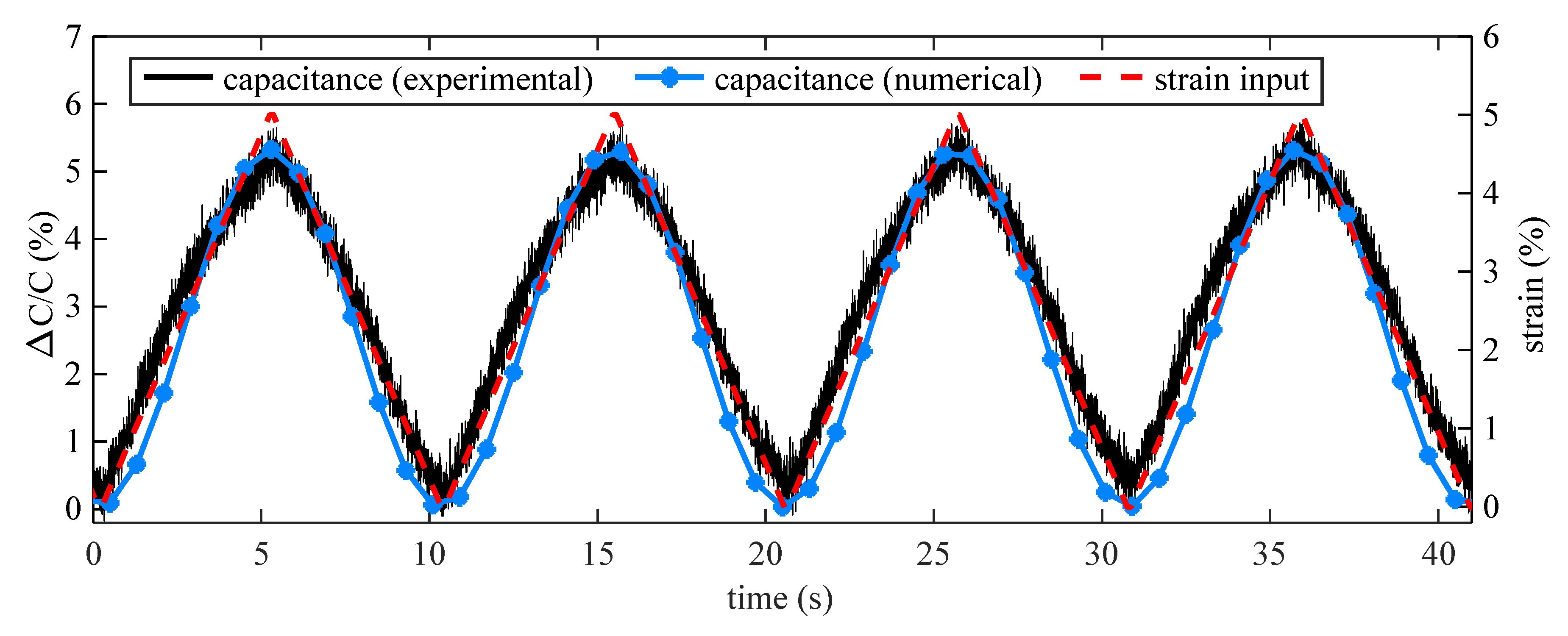
4.1. Numerical Models Validation
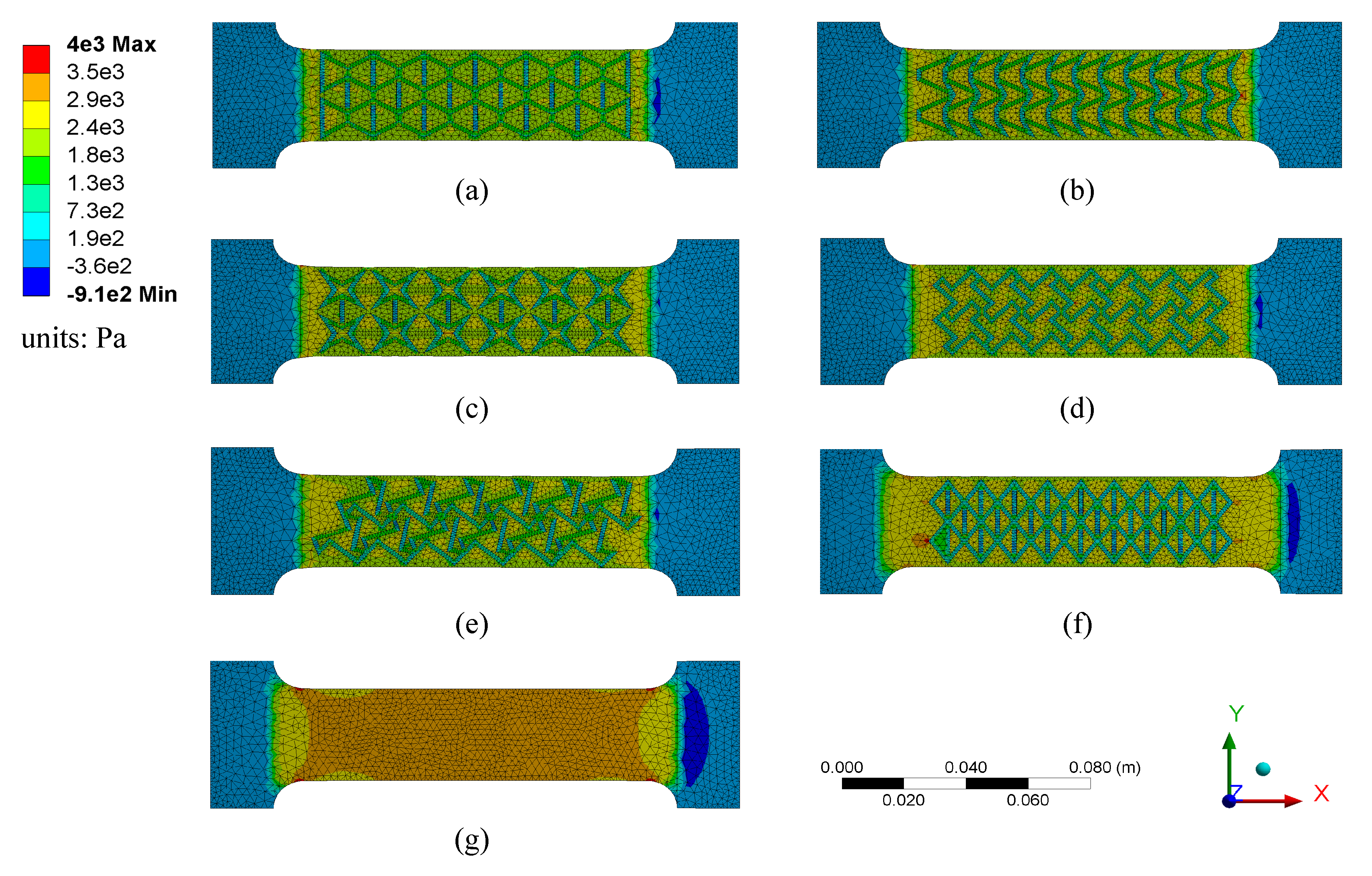
4.2. Free-Standing SEC
- Stress Distributions
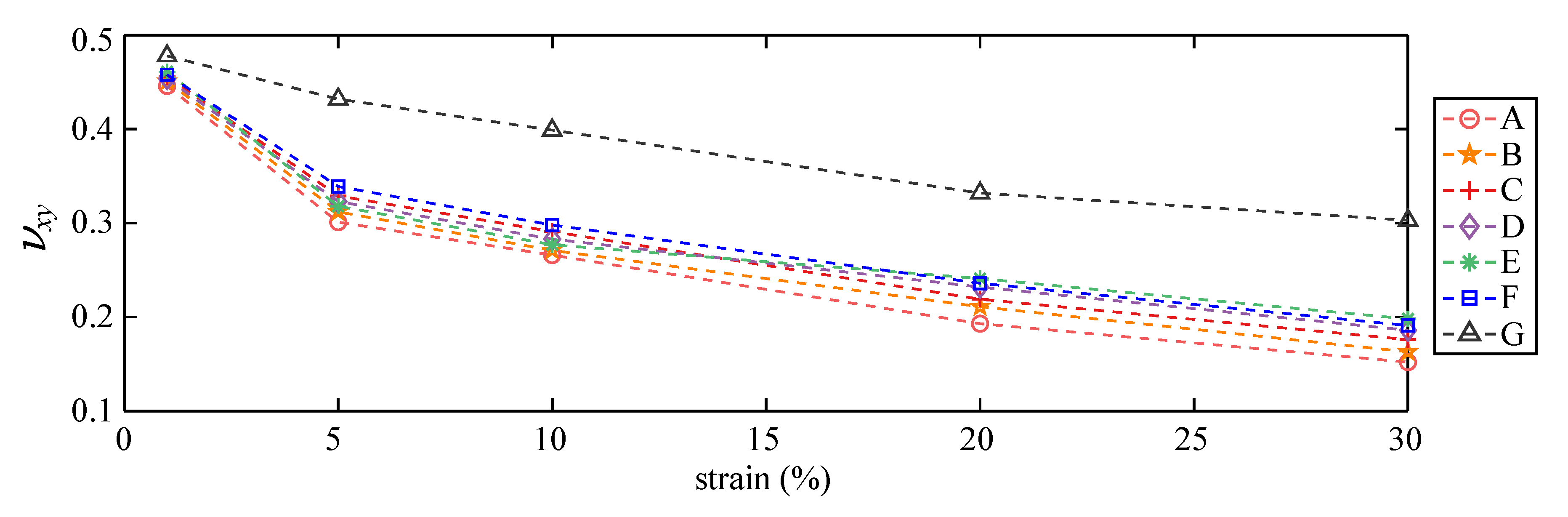
- Transverse Poisson’s Ratio
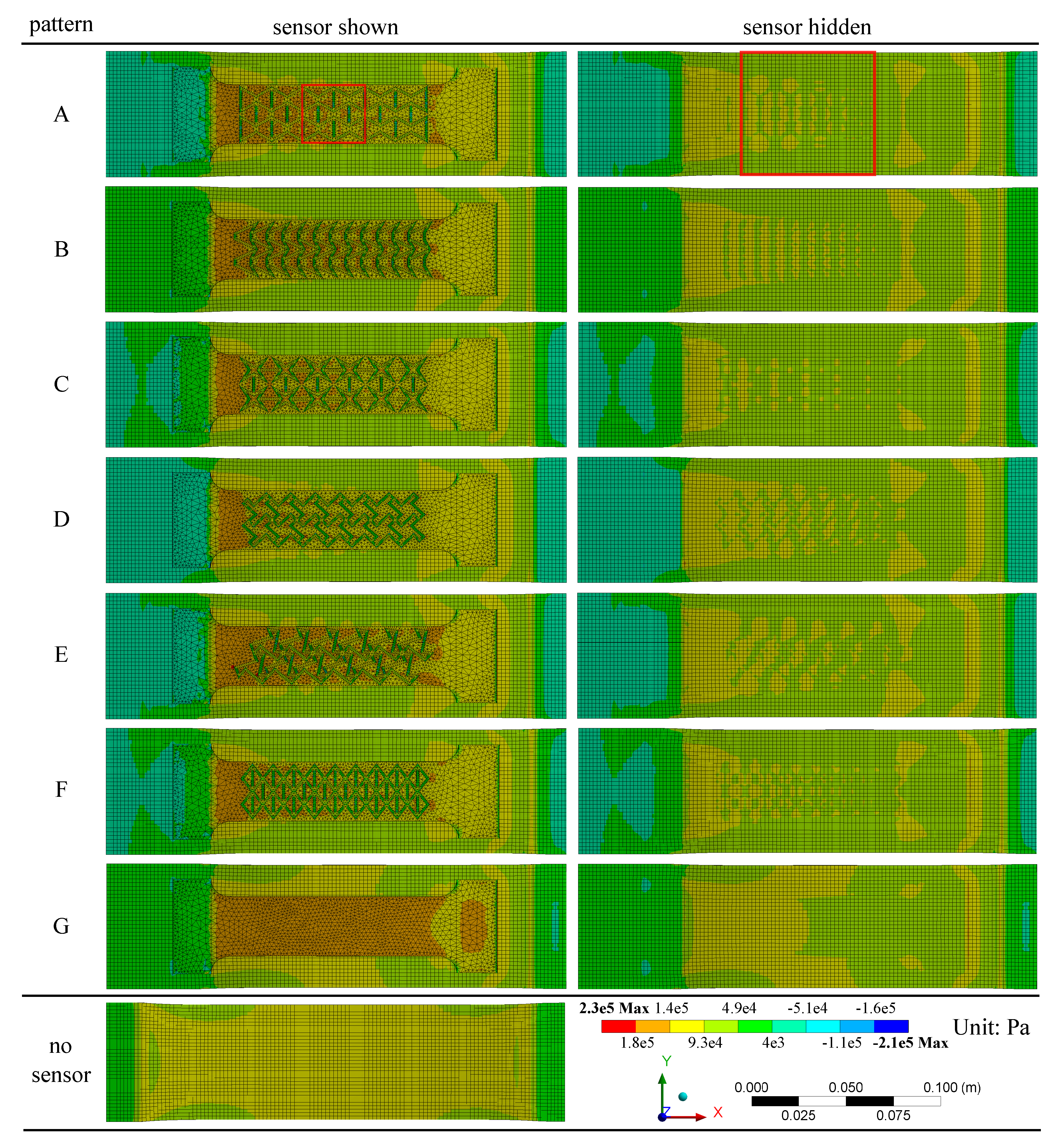
4.3. SEC-Animal Skin
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SHM | Structural Health Monitoring |
| SEC | Soft Elastomeric Capacitor |
| OPT | Optical Coherence Tomography |
| DIC | Digital Image Correlation |
| SEBS | Styrene-Ethylene-Butylene-Styrene |
| ROI | Region of Interest |
| RMSE | Root Mean Square Error |
| FME | Finite Element Model |
References
- Klosterhoff, B.S.; Tsang, M.; She, D.; Ong, K.G.; Allen, M.G.; Willett, N.J.; Guldberg, R.E. Implantable Sensors for Regenerative Medicine. J. Biomech. Eng. 2017, 139. [Google Scholar] [CrossRef] [Green Version]
- Caro-Bretelle, A.; Ienny, P.; Leger, R.; Corn, S.; Bazin, I.; Bretelle, F. Constitutive modeling of stress softening and permanent set in a porcine skin tissue: Impact of the storage preservation. J. Biomech. 2016, 49, 2863–2869. [Google Scholar] [CrossRef] [PubMed]
- Maiti, R.; Gerhardt, L.C.; Lee, Z.S.; Byers, R.A.; Woods, D.; Sanz-Herrera, J.A.; Franklin, S.E.; Lewis, R.; Matcher, S.J.; Carré, M.J. In vivo measurement of skin surface strain and sub-surface layer deformation induced by natural tissue stretching. J. Mech. Behav. Biomed. Mater. 2016, 62, 556–569. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Obropta, E.W.; Newman, D.J. A comparison of human skin strain fields of the elbow joint for mechanical counter pressure space suit development. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar] [CrossRef]
- Mokbul, M.I. Optical Coherence Tomography: Basic Concepts and Applications in Neuroscience Research. J. Med. Eng. 2017, 2017, 1–20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Downey, A.R.J.; Yan, J.; Zellner, E.M.; Kraus, K.H.; Rivero, I.V.; Laflamme, S. Use of flexible sensor to characterize biomechanics of canine skin. BMC Vet. Res. 2019, 15. [Google Scholar] [CrossRef] [PubMed]
- Cai, G.; Wang, J.; Qian, K.; Chen, J.; Li, S.; Lee, P.S. Extremely Stretchable Strain Sensors Based on Conductive Self-Healing Dynamic Cross-Links Hydrogels for Human-Motion Detection. Adv. Sci. 2016, 4, 1600190. [Google Scholar] [CrossRef] [Green Version]
- Lou, Z.; Chen, S.; Wang, L.; Jiang, K.; Shen, G. An ultra-sensitive and rapid response speed graphene pressure sensors for electronic skin and health monitoring. Nano Energy 2016, 23, 7–14. [Google Scholar] [CrossRef]
- Din, S.; Xu, W.; Cheng, L.K.; Dirven, S. A Stretchable Multimodal Sensor for Soft Robotic Applications. IEEE Sens. J. 2017, 17, 5678–5686. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Shi, Y.; Joe, P.; Ghaffari, R.; Balooch, G.; Usgaonkar, K.; Gur, O.; Tran, P.L.; Crosby, J.R.; Meyer, M.; et al. Conformal piezoelectric systems for clinical and experimental characterization of soft tissue biomechanics. Nat. Mater. 2015, 14, 728–736. [Google Scholar] [CrossRef]
- Yamada, T.; Hayamizu, Y.; Yamamoto, Y.; Yomogida, Y.; Izadi-Najafabadi, A.; Futaba, D.N.; Hata, K. A stretchable carbon nanotube strain sensor for human-motion detection. Nat. Nanotechnol. 2011, 6, 296–301. [Google Scholar] [CrossRef]
- Zens, M.; Ruhhammer, J.; Goldschmidtboeing, F.; Feucht, M.J.; Bernstein, A.; Niemeyer, P.; Mayr, H.O.; Woias, P. Polydimethylsiloxane strain gauges for biomedical applications. In Proceedings of the 2015 Transducers-2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015. [Google Scholar] [CrossRef]
- Laflamme, S.; Saleem, H.S.; Vasan, B.K.; Geiger, R.L.; Chen, D.; Kessler, M.R.; Rajan, K. Soft Elastomeric Capacitor Network for Strain Sensing Over Large Surfaces. IEEE/ASME Trans. Mechatron. 2013, 18, 1647–1654. [Google Scholar] [CrossRef] [Green Version]
- Laflamme, S.; Kollosche, M.; Connor, J.J.; Kofod, G. Robust Flexible Capacitive Surface Sensor for Structural Health Monitoring Applications. J. Eng. Mech. 2013, 139, 879–885. [Google Scholar] [CrossRef] [Green Version]
- Kong, X.; Li, J.; Collins, W.; Bennett, C.; Laflamme, S.; Jo, H. Sensing distortion-induced fatigue cracks in steel bridges with capacitive skin sensor arrays. Smart Mater. Struct. 2018, 27, 115008. [Google Scholar] [CrossRef] [Green Version]
- Downey, A.; Pisello, A.L.; Fortunati, E.; Fabiani, C.; Luzi, F.; Torre, L.; Ubertini, F.; Laflamme, S. Durability and weatherability of a styrene-ethylene-butylene-styrene (SEBS) block copolymer-based sensing skin for civil infrastructure applications. Sens. Actuators A Phys. 2019, 293, 269–280. [Google Scholar] [CrossRef]
- Yan, J.; Downey, A.; Cancelli, A.; Laflamme, S.; Chen, A.; Li, J.; Ubertini, F. Concrete Crack Detection and Monitoring Using a Capacitive Dense Sensor Array. Sensors 2019, 19, 1843. [Google Scholar] [CrossRef] [Green Version]
- Kong, X.; Li, J.; Collins, W.; Bennett, C.; Laflamme, S.; Jo, H. A large-area strain sensing technology for monitoring fatigue cracks in steel bridges. Smart Mater. Struct. 2017, 26, 085024. [Google Scholar] [CrossRef]
- Downey, A.; Ubertini, F.; Laflamme, S. Algorithm for damage detection in wind turbine blades using a hybrid dense sensor network with feature level data fusion. J. Wind Eng. Ind. Aerodyn. 2017, 168, 288–296. [Google Scholar] [CrossRef] [Green Version]
- Mir, M.; Ali, M.N.; Sami, J.; Ansari, U. Review of Mechanics and Applications of Auxetic Structures. Adv. Mater. Sci. Eng. 2014, 2014, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Yan, J.; Kollosche, M.; Bentil, S.; Laflamme, S. Surface textures for stretchable capacitive strain sensors. Smart Mater. Struct. IOPsci. 2020. [Google Scholar] [CrossRef]
- Kolken, H.M.A.; Zadpoor, A.A. Auxetic mechanical metamaterials. RSC Adv. 2017, 7, 5111–5129. [Google Scholar] [CrossRef] [Green Version]
- Evans, K.E.; Nkansah, M.A.; Hutchinson, I.J.; Rogers, S.C. Molecular network design. Nature 1991, 353, 124. [Google Scholar] [CrossRef]
- Critchley, R.; Corni, I.; Wharton, J.A.; Walsh, F.C.; Wood, R.J.K.; Stokes, K.R. A review of the manufacture, mechanical properties and potential applications of auxetic foams. Phys. Status Solidi B 2013. [Google Scholar] [CrossRef]
- Fei, X.; Jin, L.; Zhang, X.; Li, X.; Lu, M. Three-dimensional anti-chiral auxetic metamaterial with tunable phononic bandgap. Appl. Phys. Lett. 2020, 116, 021902. [Google Scholar] [CrossRef]
- Duncan, O.; Shepherd, T.; Moroney, C.; Foster, L.; Venkatraman, P.; Winwood, K.; Allen, T.; Alderson, A. Review of Auxetic Materials for Sports Applications: Expanding Options in Comfort and Protection. Appl. Sci. 2018, 8, 941. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zulifqar, A.; Hu, H. Auxetic composites in aerospace engineering. In Advanced Composite Materials for Aerospace Engineering; Elsevier: Amsterdam, The Netherlands, 2016; pp. 213–240. [Google Scholar] [CrossRef]
- Bellis, M.L.D.; Bacigalupo, A. Auxetic behavior and acoustic properties of microstructured piezoelectric strain sensors. Smart Mater. Struct. 2017, 26, 085037. [Google Scholar] [CrossRef] [Green Version]
- Laflamme, S.; Ubertini, F.; Saleem, H.; D’Alessandro, A.; Downey, A.; Ceylan, H.; Materazzi, A.L. Dynamic Characterization of a Soft Elastomeric Capacitor for Structural Health Monitoring. J. Struct. Eng. 2015, 141, 04014186. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Zhang, Y. Soft network materials with isotropic negative Poisson’s ratios over large strains. Soft Matter 2018, 14, 693–703. [Google Scholar] [CrossRef]
- Khan, S.Z.; Masood, S.; Cottam, R. Mechanical properties in tensile loading of H13 re-entrant honeycomb auxetic structure manufactured by direct metal deposition. MATEC Web Conf. 2015, 34, 01004. [Google Scholar] [CrossRef]
- Wang, T.; Wang, L.; Ma, Z.; Hulbert, G.M. Elastic analysis of auxetic cellular structure consisting of re-entrant hexagonal cells using a strain-based expansion homogenization method. Mater. Des. 2018, 160, 284–293. [Google Scholar] [CrossRef]
- Zhang, W.; Ma, Z.; Hu, P. Mechanical properties of a cellular vehicle body structure with negative Poisson’s ratio and enhanced strength. J. Reinf. Plast. Compos. 2013, 33, 342–349. [Google Scholar] [CrossRef]
- Carneiro, V.H.; Puga, H.; Meireles, J. Analysis of the geometrical dependence of auxetic behavior in reentrant structures by finite elements. Acta Mech. Sin. 2015, 32, 295–300. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, Y. 3D Printed Chiral Cellular Solids with Amplified Auxetic Effects Due to Elevated Internal Rotation. Adv. Eng. Mater. 2016, 19, 1600609. [Google Scholar] [CrossRef]
- Gaspar, N.; Ren, X.; Smith, C.; Grima, J.; Evans, K. Novel honeycombs with auxetic behaviour. Acta Mater. 2005, 53, 2439–2445. [Google Scholar] [CrossRef]
- Lapeer, R.J.; Gasson, P.D.; Karri, V. A Hyperelastic Finite-Element Model of Human Skin for Interactive Real-Time Surgical Simulation. IEEE Trans. Biomed. Eng. 2011, 58, 1013–1022. [Google Scholar] [CrossRef] [PubMed]
- Groves, R.B.; Coulman, S.A.; Birchall, J.C.; Evans, S.L. An anisotropic, hyperelastic model for skin: Experimental measurements, finite element modelling and identification of parameters for human and murine skin. J. Mech. Behav. Biomed. Mater. 2013, 18, 167–180. [Google Scholar] [CrossRef] [PubMed]
- Raveh Tilleman, T.; Tilleman, M.M.; Neumann, H.A. The Elastic Properties of Cancerous Skin: Poisson’s ratio and Young’s Modulus. 2004. Available online: https://d1wqtxts1xzle7.cloudfront.net/43550634/Analyses_of_skin_waste_during_excision_o20160309-6931-7y3r5e.pdf?1457541574=&response-content-disposition=inline%3B+filename%3DAnalyses_of_Skin_Waste_during_Excision_o.pdf&Expires=1595907514&Signature=bnoETarKXm2hLrEDVzASvKPxQLzRnu3fZhw0ivmqN86tUPhfVyPA-w7nOKlMVem~pwxnBSOVYErFSrP9kpMpL1QI9joB9gylf~fEzGZ7LfCe5AvfFEMfOWo8BETAx7r0vYJ61XBrLx7qP~IOv1GljXGkOgblo0Zx83JXRqQ2ofnjxlt4ZPz6qvUby7zLk3XRlz2Up3CJE6bAuZx37HO88wbRI5gfOuwP5m3Q5RWWk-~CQvrGp79UMtmix65FOsmggT~gPn53agogeRyTb8yvm7z4lFATjnQ7VAjtId37K1CgEvegbP–1fRyjvcvLacZyn8GTarlDVBTwGtb2IxMpg__&Key-Pair-Id=APKAJLOHF5GGSLRBV4ZA#page=103 (accessed on 25 July 2020).
- Kazmer, D.O.; Eaves, F.F. Force Modulating Tissue Bridges for Reduction of Tension and Scar: Finite Element and Image Analysis of Preclinical Incisional and Nonincisional Models. Aesthetic Surg. J. 2018, 38, 1250–1263. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strain Level | |||||
|---|---|---|---|---|---|
| Pattern | 1% | 5% | 10% | 20% | 30% |
| F | 2.7 | 11.2 | 10.8 | 15.8 | 16.6 |
| G | 6.8 | 30.2 | 33.3 | 43.9 | 47.8 |
| Strain Level | |||||||
|---|---|---|---|---|---|---|---|
| Pattern | 1% | 5% | 10% | 20% | 30% | ||
| A | 1.062 | 1.231 | 1.223 | 1.218 | 1.208 | 1.220 | 0.010 |
| B | 1.053 | 1.211 | 1.213 | 1.196 | 1.198 | 1.205 | 0.009 |
| C | 1.043 | 1.182 | 1.181 | 1.186 | 1.180 | 1.182 | 0.003 |
| D | 1.046 | 1.192 | 1.189 | 1.176 | 1.168 | 1.181 | 0.011 |
| E | 1.034 | 1.202 | 1.203 | 1.152 | 1.142 | 1.175 | 0.032 |
| F | 1.039 | 1.163 | 1.168 | 1.161 | 1.156 | 1.162 | 0.004 |
| G | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 0 |
| Pattern | |||||
|---|---|---|---|---|---|
| A | 0.357 | 1.132 | −0.661 | 0.780 | 0.451 |
| B | 0.364 | 1.119 | −0.507 | 0.914 | 0.480 |
| C | 0.370 | 1.109 | −0.593 | 0.763 | 0.457 |
| D | 0.372 | 1.106 | −0.552 | 0.737 | 0.521 |
| E | 0.368 | 1.112 | −0.538 | 1.000 | 0.493 |
| F | 0.389 | 1.076 | −0.579 | 0.808 | 0.501 |
| G | 0.441 | 0.958 | 0.615 | 0.725 | 0.526 |
| no sensor | - | - | - | - | 0.624 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Kollosche, M.; Yan, J.; Zellner, E.M.; Bentil, S.A.; Rivero, I.V.; Wiersema, C.; Laflamme, S. Numerical Investigation of Auxetic Textured Soft Strain Gauge for Monitoring Animal Skin. Sensors 2020, 20, 4185. https://doi.org/10.3390/s20154185
Liu H, Kollosche M, Yan J, Zellner EM, Bentil SA, Rivero IV, Wiersema C, Laflamme S. Numerical Investigation of Auxetic Textured Soft Strain Gauge for Monitoring Animal Skin. Sensors. 2020; 20(15):4185. https://doi.org/10.3390/s20154185
Chicago/Turabian StyleLiu, Han, Matthias Kollosche, Jin Yan, Eric M. Zellner, Sarah A. Bentil, Iris V. Rivero, Colin Wiersema, and Simon Laflamme. 2020. "Numerical Investigation of Auxetic Textured Soft Strain Gauge for Monitoring Animal Skin" Sensors 20, no. 15: 4185. https://doi.org/10.3390/s20154185