A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control
by
 , ,
, ,
Ángel Cuenca
1,* ,
,
Wei Zhan
2,
Julián Salt
1,
José Alcaina
1,
Chen Tang
2 and
Masayoshi Tomizuka
2 1
Instituto Universitario de Automática e Informática Industrial, Universitat Politècnica de València, 46022 València, Spain
2
Mechanical Engineering Department, University of California, Berkeley, CA 94720, USA
*
Author to whom correspondence should be addressed.
Sensors 2019, 19(13), 2983; https://doi.org/10.3390/s19132983
Submission received: 24 May 2019
/
Revised: 25 June 2019
/
Accepted: 4 July 2019
/
Published: 6 July 2019
(This article belongs to the Special Issue Sensor Data Fusion for IoT and Industrial Applications)
Abstract
:This work presents a novel remote control solution for an Autonomous Vehicle (AV), where the system structure is split into two sides. Both sides are assumed to be synchronized and linked through a communication network, which introduces time-varying delays and packet disorder. An Extended Kalman Filter (EKF) is used to cope with the non-linearities that appear in the global model of the AV. The EKF fuses the data provided by the sensing devices of the AV in order to estimate the AV state, reducing the noise effect. Additionally, the EKF includes an h-step-ahead state prediction stage, which, together with the consideration of a packet-based control strategy, enables facing the network-induced delays. Since the AV position is provided by a camera, which is a slow sensing device, a dual-rate controller is required to achieve certain desired (nominal) dynamic control performance. The use of a dual-rate control framework additionally enables saving network bandwidth and deals with packet disorder. As the path-tracking control algorithm, pure pursuit is used. Application results show that, despite existing communication problems and slow-rate measurements, the AV is able to track the desired path, keeping the nominal control performance.
1. Introduction
In this work, a remote control solution is proposed for Autonomous Vehicle (AV) path tracking. The solution fits in the field of Networked Control Systems (NCSs) [1,2,3,4], which is a prolific control area that addresses control scenarios where different devices share a common communication link. The use of a shared communication network introduces some advantages like cost reduction, reconfigurability, and ease of installation and maintenance, but also some drawbacks such as the possible occurrence of network-induced delays [5,6,7,8,9,10], packet dropouts [11,12,13], packet disorder [14,15,16], and network bandwidth constraints [17,18,19]. In this work, the drawbacks considered in the network are time-varying delays and packet disorder.
An AV can be defined as a vehicle that is capable of intelligent motion and action without human input [20]. AVs have attracted the attention of the scientific community due to the large number of applications in which they can be involved (for instance, target tracking [21], surveillance [22], transportation [23], self-driving cars [24], etc.). In our work, a target tracking application is developed, where the AV concretely is a differential robot. As the path tracking algorithm, pure pursuit [25,26,27] has been chosen. The hierarchical structure of the AV (see, e.g., [28]) is split into two sides, with the communication network between them. In particular, the motion planning and vehicle control layers are located on-board, whereas upper levels of the structure such as decision-making, path generation, and monitoring are located at the remote server. In this way, safety-critical tasks are executed on-board in real-time, whereas longer term computations, which mostly affect performance and are generally not real-time critical, are executed in the remote server.
The present work is mainly focused on designing a control solution at the local side, which will integrate state estimation, packet-based control, and dual-rate control. The main idea is to generate a set of path references from way points at the remote server, and send them to the AV through the network. Then, the control level is able to compute a delay-free control signal to be applied to the AV and generate a set of future state estimations, which is sent to the remote server for upper level purposes such as displaying variables, making decisions (e.g., trajectory replanning), etc.
As is well known, AV path tracking involves non-linearities [29]. Sensed variables must be accurately estimated and corrected in order to provide the motion planning and control layers with reliable data. For this purpose, different filtering approaches can be used, such as the Kalman filter (see, for example, [30,31,32]) and the filter (see, for instance, [32,33]), among others. The attractiveness of the Kalman filter lies in the fact that it is the one estimator that results in the smallest possible standard deviation of the estimator error. However, when the goal is to minimize the worst-case estimation error, the filter is a better option. The filter provides a rigorous method for dealing with systems that have model uncertainty, but is more sensitive to the design parameters (weighting functions) than the Kalman filter. As a conclusion, theory shows us the optimal way to robustify the Kalman filter, this theory being more abstract and complicated than the one underlying the Kalman filtering.
Focusing on the Kalman filter, it is widely used in its extended and unscented versions (see, e.g., [29,30,31,34]). In this work, the Extended Kalman Filter (EKF) has been chosen not only to estimate the non-linear behavior of the AV, reducing the process and measurement noise effect, but also to fuse all the data provided by the different sensors in order to be used by the control algorithm. The sensing devices used in our path tracking application are two encoders, an Inertial Measurement Unit (IMU) and a zenithal camera, which respectively provide the angular velocities of each wheel, the AV orientation, and the AV position. In our proposal, the EKF is complemented with an h-step-ahead state prediction stage, which, together with the integration of packet-based control strategies in the control solution, enables compensating for time-varying network-induced delays.
Packet-based control [35,36] is usually employed to decrease the communication rate by simultaneously sending a set of data in each transmission. In our work, the main aim of including this technique in the control solution is two-fold:
- To provide the motion planning and control layers with a set of h-step-ahead path references. From this set and after successively iterating the different components of these layers in the current sensing period, a set of h-step-ahead control action estimates can be computed by following a delay-free control algorithm.
- To supply the upper layers of the AV structure included at the remote server with a set of h-step-ahead state predictions (computed by the motion planning and control layers in every sensing period), which is updated irrespective of the delay when a new packet is received.
Then, for implementation purposes, the time-varying network-induced delay is not required to be measured and compensated for. This is a relevant aspect of this work, since it makes the solution applicable to a wide range of wireless control applications where the time delay is difficult to measure. This working mode is possible because an accurate system model and an acceptable level of noise are assumed, and hence, the difference between actual and estimated signals should be negligible. In addition, the possible divergences between both signals can be corrected by the EKF.
In dual-rate control [37,38,39,40], a slower sensing rate in comparison to a faster actuation can be assumed. As mentioned, in this work, a zenithal camera is used to sense the AV position, which is provided at a slow rate due to technical constraints. Despite sensing in this way, the fast actuation enables achieving acceptable control properties. In addition, dual-rate control techniques provide two-fold benefits: (i) to reduce the amount of transmissions through the network, which results in bandwidth saving; (ii) to elude packet disorder, selecting the sampling period to be larger than the largest network-induced time delay. As a statistical distribution for the delay is assumed to be known [41], the largest delay can be easily found. In the present work, due to the broad knowledge of PID controllers in academic and industrial environments, a dual-rate PID control scheme is considered.
In summary, the main contribution of the present work is the development of a novel and complete remote control approach for an AV, where an EKF (including an h-step-ahead state prediction stage), packet-based control, the pure pursuit path tracking algorithm, and a dual-rate dynamic controller are systematically brought together in order to keep the nominal control properties when path tracking and considerably lessen resource usage such as network bandwidth. These facts are reached despite existing wireless communication problems such as time-varying delays and packet disorder, and the appearing process and measurement noise signals. The nominal control performance is defined by means of an ideal fast-rate control framework, where no noise and delay are considered.
In Section 2, the novel control structure is presented. In addition, some details about how the network-induced delays can be faced are posed. In Section 3, the non-linear model of the AV is introduced, and then, the control design of the motion planning and control layers of the AV structure is formulated. Section 4 presents some cost indexes to measure and compare control performance among the proposed control solution and other approaches. Section 5 shows the main benefits of the control proposal by means of a Truetime application [42]. Finally, Section 6 summarizes the main conclusions of the work.
2. Problem Scenario
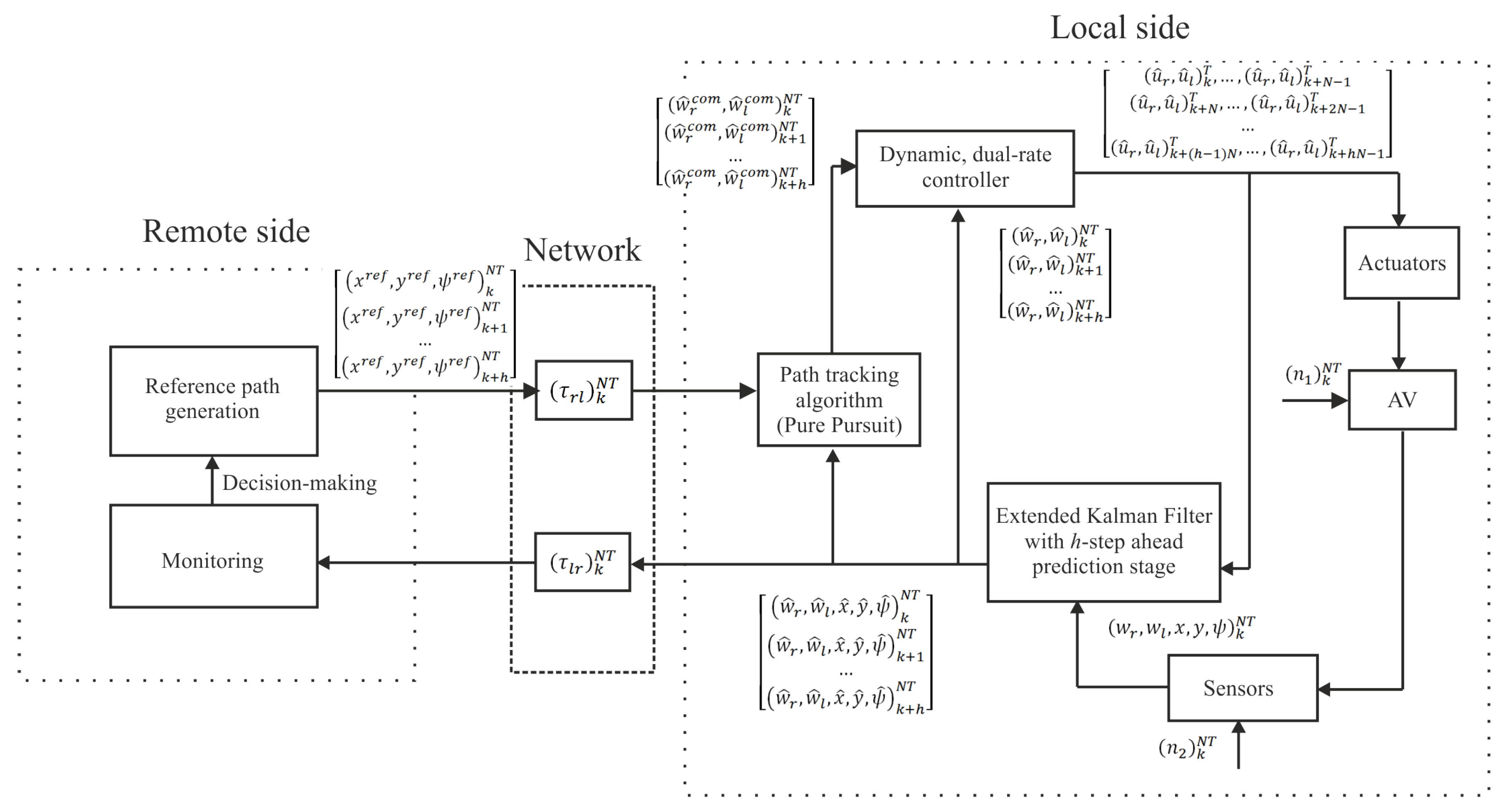
The overall control scheme is depicted in Figure 1. The proposed structure includes two sides: (i) the local side, where the AV is located together with different actuators and sensors (which can introduce measurement noise) and where motion planning and vehicle control layers are implemented; and (ii) the remote side, where upper level layers of the hierarchical structure of the AV are included, in such a way that the remote server is in charge of generating the path reference based on way points, displaying and monitoring system data, and making decisions from this information. A wireless network is used to connect both sides, which introduces some communication problems such as time-varying delays and packet disorder. In the next subsections, these problems are formally described, and the working mode of the control structure is presented.
2.1. Control Structure
There are three main keys to the control solution:
- Fusing all the data provided by the different sensors (encoders, IMU, camera) by means of an Extended Kalman Filter (EKF) in order to estimate the state of the AV, reducing the noise effect. The extended version of the Kalman Filter is needed due to the non-linear nature of the AV.
- Including an h-step-ahead state prediction stage in the EKF, using a packet-based control strategy, for the purpose of dealing with network-induced delays, and providing the remote side with future, estimated data.
- Integrating dual-rate control with a view toward achieving the desired (nominal) control specifications, coping with slow sensing and packet disorder.
The control structure uses two different periods: T as the actuation period and as the sensing period, being the multiplicity between the two periods of the dual-rate control scheme [38]. Let us respectively denote and as a T-period and an -period signal or variable, where are iterations in the corresponding period. Communication between the two network sides is carried out in the sensing period , i.e., at instants , which helps save network bandwidth; concretely, the use of the network is N-times lower than that produced by a conventional single-rate control in period T.
In more detail, the control structure works as follows:
- At the current instant kNT, the remote side generates a set of h path references, which includes from the reference to be used at instant k, i.e., , to the reference to be used at instant , i.e., . The set is composed of reference positions and reference yaw angle , and it is sent to the local side in a packet.
- The local side gets the current system state , which coincides with the system output in this work, being affected by the process and measurement noises, and , respectively. The state is composed of angular velocities , positions , and yaw angle .
- The next estimation of the system state is computed via an Extended Kalman Filter (EKF). This estimation carried out by the EKF is actually the correction of the state.
- From this state and the path reference for the instant , i.e., , received in the previous packet after the remote-to-local delay , the path tracking algorithm (pure pursuit in this case) computes the dynamic reference, or command, for the instant , i.e., .
- From this dynamic reference and the estimated angular velocities , the dynamic, dual-rate controller computes the control signal to be applied to the AV, i.e., , which are the control actions in period T for the right and left motors, respectively, inside the sensing period . As a uniform actuation pattern, the actuation occurs at uniformly-spaced instants () under Zero Order Hold (ZOH) conditions inside the sensing period. That is, is applied at , is injected at , and so on, up to , which is actuated at .
- From this control signal and the estimated state for the instant , the h-step-ahead state prediction stage is able to compute the estimation of the state for the instant , i.e., . This computation is carried out in an open loop. Iterating the control loop h times, the local side can obtain the h state estimations to be sent in a packet to the remote side. Therefore, when the remote server receives the packet at the current time instant kNT and after the local-to-remote delay , it can manage future system information, for example, to be displayed and to make decisions.
2.2. Time-Varying Delays, and Packet Disorder
Assuming synchronization between both network sides [43], time-varying delays can be measured for both communication links. From off-line experiences on the communication network, a statistical distribution of the delay can be obtained and, hence, the maximum delay . Packet disorder may appear when . In the present work, by taking advantage of the use of dual-rate control to deal with slow sensing, a straightforward solution is considered to avoid packet disorder, that is setting up the sampling period to be larger than the maximum time delay , i.e., .
In order to cope with time-varying delays, the control solution integrates a packet-based strategy and predictor-based control. Next, details about how the delays can be faced are given:
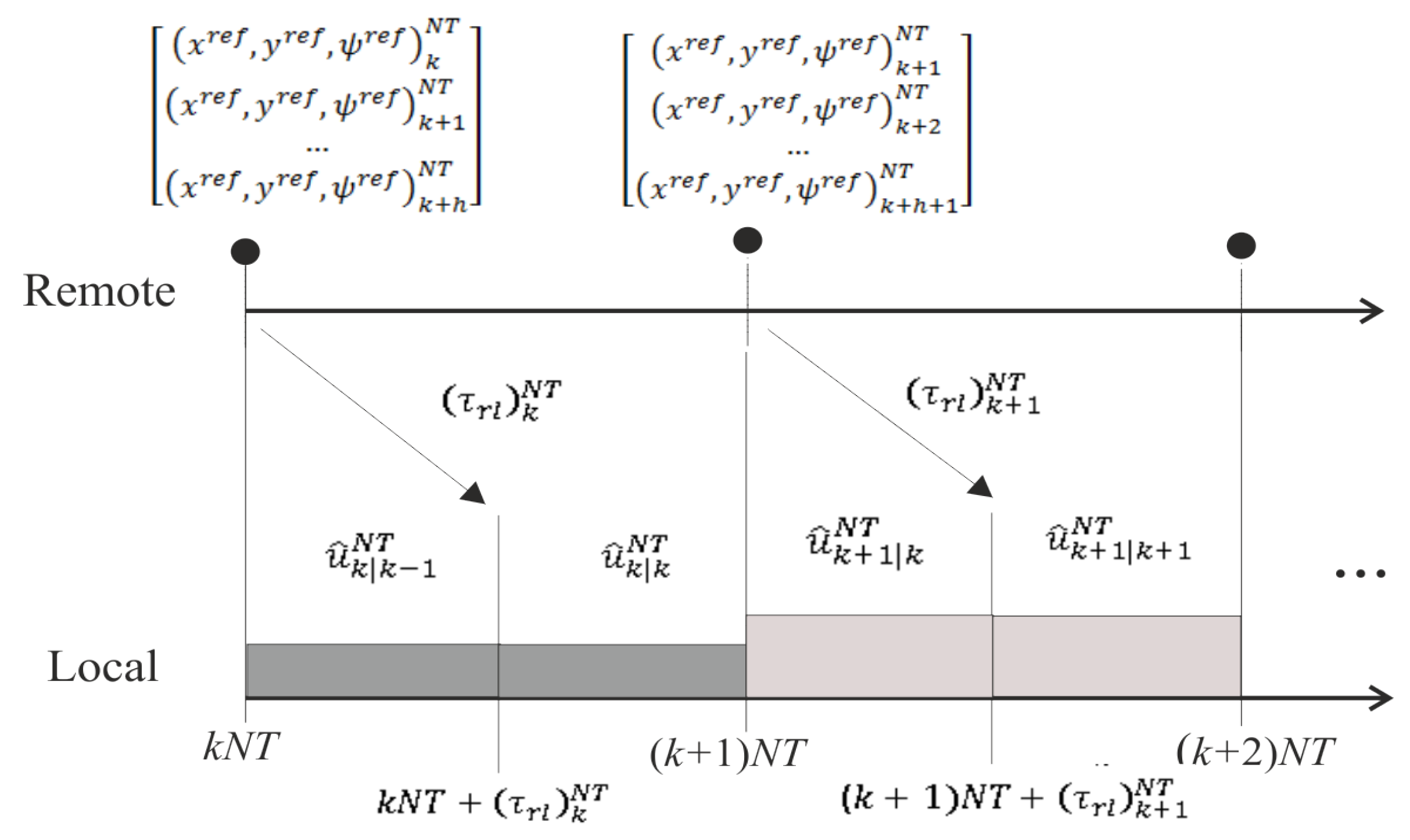
- Remote-to-local delays : By implementing the packet-based strategy, the packet with the set of references generated by the remote server from the instant to the instant arrives after the delay at the local side. As a consequence of integrating predictor-based control and assuming an accurate system model and an acceptable level of noise, this delay will not affect the control system. The reason is that, since the reference for the current instant was received in the previous delivery, the consequent estimated control action is already being injected from the beginning of the current period. When the packet is received, a new control action is computed from the corrected state. This control action will be very similar to the estimated one, and hence, an insignificant change is produced in the control signal. Note that possible changes in the reference due to decision-making tasks are recommended to be included at least from instant of the set of references in order to keep the described working mode, avoiding the delay effect. Figure 2 depicts a time axis example of this communication channel, where, for the sake of simplicity, a single-rate control at is considered. Notation means the estimated control action to be applied at instant , which is calculated at instant kNT from the reference . As shown, when the packet is received, a new control action is computed, which is practically the same as that previously calculated from the preceding delivery, i.e., and .
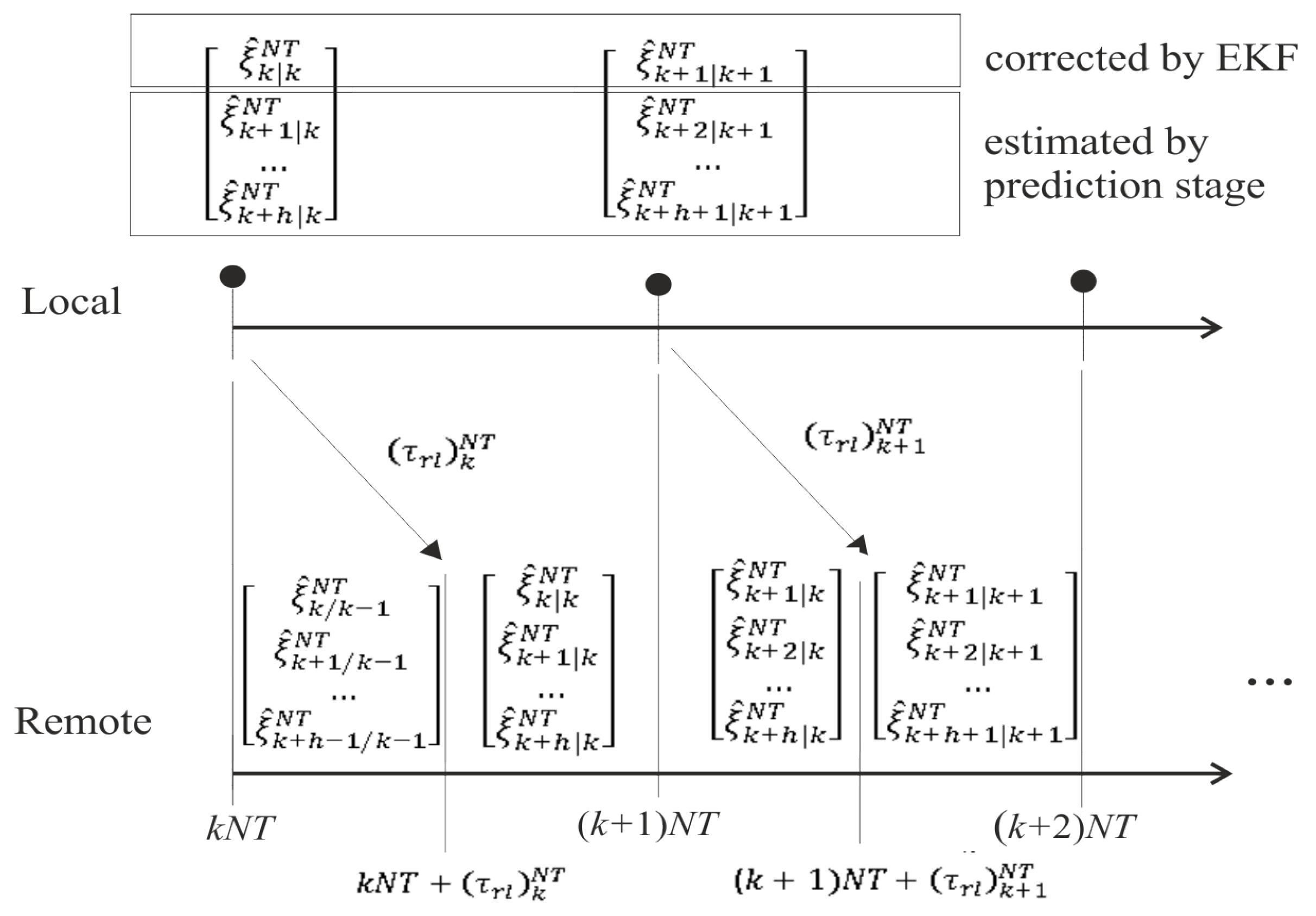
- Local-to-remote delays : Similar to the other link, by implementing the packet-based strategy, the packet with the set of estimations generated by the EKF and the h-step-ahead state prediction stage from instant to instant arrives after the delay at the remote side. The working mode is as follows: from the beginning of the period, a set of state estimates is used, and when a new packet arrives, this set is replaced with the received one, which includes state correction. Figure 3 depicts a time axis example of this communication channel. The notation means the state estimated for the instant at the instant , i.e., . The estimation is actually the state corrected by the EKF, and hence, the state estimate can be replaced with its correction . From this correction, the h-step-ahead state prediction stage estimates the rest of the state values in order to replace the previous estimations . Additionally, the prediction stage generates a new state estimate to complete the set of predicted states. Excluding this new value and considering an accurate model and an acceptable level of noise, the difference between the previous and the current set of state values should be negligible.
3. Motion Planning and Control Solution Design
In the following subsections, each component of the motion planning and control layers of the AV structure will be defined in detail. The systematic combination of these components (EKF including h-step-ahead state prediction stage, pure pursuit path tracking algorithm, and dual-rate dynamic controller) is the most relevant contribution of this work. It enables maintaining the nominal control performance when path tracking and reduces the network bandwidth usage, despite the existence of time-varying network-induced delays and packet disorder and the appearance of process and measurement noise signals. Next, first of all, the AV model will be presented.
3.1. Plant Modeling
In this work, a non-linear kinematic model was utilized by the EKF in order to fulfill state estimation. Additionally, a dynamic relation between the control signal and the rotational velocity of the wheel was needed in order to design the dual-rate dynamic controller.
3.1.1. Kinematic Model
The kinematic model represents the AV velocity evolution in a fixed inertial frame. From the AV linear and rotational velocities in sampling period , i.e., and , respectively, the AV position and orientation in the time period , i.e., , can be deduced as follows [44]:
, where is the initial position and orientation and where the AV linear and rotational velocities come from:
being b half of the distance between the wheels and the linear velocities for each wheel, which are defined from the radius of the wheels, and , and the consequent rotational velocities sensed in period , , as follows:
3.1.2. Dynamic Model
The dynamic model represents the relation between the control signal and the rotational velocity for each wheel. Considering state-space representation, the model in sampling period T takes this form:
where, for the sake of simplicity, let us name:
- as the output, that is the rotational velocity either for the right motor or for the left motor and
- as the input, that is the control signal, regardless of the motor, or .
In addition, is the process noise, the measurement noise, the process state (regardless of the motor), and matrices with suitable dimensions. No unknown input is assumed.
Using Z-transform in period T, the input-output plant model for the control signal and the rotational velocity is represented as a discrete-time transfer function:
z being the T-unit operator.
The plant model in (4) admits a lifted representation [45] such as:
which can be equivalently seen as a dual-rate sampled-data system, where the output in period , , i.e., either or , is obtained from a sequence of inputs in period T included in the sensor period , i.e., , where means the transpose function, such as:
3.2. Extended Kalman Filter, Including an h-Step-Ahead State Prediction Stage
Since the AV model is non-linear, the use of Kalman filtering for state estimation may be considered through a linearization procedure, which is based on the use of a matrix of partial derivatives, that is a Jacobian matrix. At each time step, the Jacobian matrix is evaluated with current predicted states. This procedure results in an EKF (see, e.g., [30,31,32]).
Let us denote the global non-linear dynamic model previously introduced by means of (1)–(3) and (7) as the next state-space representation:
where we use the AV state as . As previously defined, is the control signal, and and are the process and measurement noises, respectively, which were both assumed to be zero mean multivariate Gaussian noises with covariance and , respectively.
Taking into account the notation introduced in Section 2.1, where means the state estimated for the instant at the instant , the prediction and correction steps of the EKF are defined as follows:
- Prediction of the next state and propagation of the covariance :, where and , being the expectation, and where and are Jacobian matrices computed in order to linearize respectively the process model about the current state and about the process noise:
- Prediction of the future output and computation of the Kalman filter gain :where and are Jacobian matrices calculated in order to linearize respectively the output model about the predicted next state and about the measurement noise:
- Correction of the state and correction of the covariance :
Additionally, the EKF integrated an h-step-ahead state prediction stage, whose working mode is described in the next items:
- The state corrected in (13) was used, together with the kinematic reference , by the path tracking algorithm in order to calculate the dynamic reference to be followed by each wheel, . More details about this calculation will be given in Section 3.3.
- From these dynamic references and the corrected rotational velocities , the dynamic controller was able to compute the control signal for the current sensing period. More details about this computation will be provided in Section 3.4.
- Following an open-loop dynamics-based prediction, the non-linear model of the AV in (8) was iterated from the estimated state and the control signal in order to obtain the next state and output estimations, and , respectively:
- Finally, Steps 1–3 were repeated 1 times to compute the rest of the values of the set of estimates .
3.3. Pure Pursuit Path Tracking Algorithm
From the desired kinematic reference and the state corrected by the EKF in period , , the AV was able to infer its current position using a path tracking algorithm. As commented, in this work, pure pursuit was chosen (see, e.g., [25,26,27]), which generated the dynamic reference based on the rotational velocity for both wheels, i.e., , in order to reach properly the next point of the desired trajectory.
The reference generator was in charge of providing the pure pursuit algorithm with a sequence of h-step-ahead kinematic references, . From these references and the h-step-ahead estimations, the AV path tracking was able to establish the set of h future dynamic references, .
The pure pursuit algorithm was based on the computation of the curvature that a vehicle must adopt from its current position to a target position . A circle of radius r that joins both points can be considered, the center of the circle being in . In addition, the distance to the target point is L.
Therefore, it is possible to express:
being the curvature:
and the so-called pure pursuit control law:
Therefore, the control law is proportional to the lateral shift and inversely proportional to the square of L.
The pure pursuit path tracking algorithm requires determining the target, reference position located at a minimum distance from the current position , i.e., the so-called Look Ahead Distance (LAD), not considering the nearest points in the prescribed trajectory. This procedure avoids a severe correction, and hence, it leads to a soft movement. Assuming and the current position and orientation , the pure pursuit control law can be expressed as follows:
For a desired linear velocity , the rotational velocity reference can be calculated as:
As a summary, these are the steps to be followed when the main loop of the pure pursuit algorithm is implemented:
- Generation of the future reference for the robot, : From the desired kinematic reference and the Look Ahead Distance (LAD), the nearest point to the future path tracking that was located far away from the LAD was calculated.
- Control law computation: From and the position and orientation estimate provided by the EKF, , the control law was computed by using (18), and then, was calculated for each wheel by using (19), requiring a desired . Finally, from these data, could be calculated:where b was previously defined as half of the distance between the wheels and and as the radius of each wheel.
3.4. Dual-Rate Controller
In this work, in order to reach the desired control performance, a dual-rate controller was used. From -period signals such as the dynamic reference generated by the pure pursuit path tracking algorithm and the estimated, corrected rotational velocities obtained by the EKF, the dynamic dual-rate controller computed N control actions in period T for each wheel inside the current sensor period . This control signal was previously defined as . Following this operation mode for the next h dynamic references and rotational velocities, and , respectively, the set of future control actions can be obtained.
Different alternatives can be followed to design a dual-rate controller (see, e.g., in [37,38]). In this case, the model-based dual-rate controller design described in [37] was chosen, where the cascade structure of the controller included:
- A slow-rate sub-controller: .
- A digital hold: .
- A fast-rate sub-controller: .
The input of was the error signal . Note that the output of (i.e., ) was expanded, , before being injected into the digital hold . The expand operation implied filling the slow-rate signal with zeros at the fast-rate instants (more details can be found in [37]). Then, the digital hold obtained its output by means of:
which in conclusion resulted in the sub-controller output being repeated N times. From the consideration of as the desired closed-loop control performance of the original continuous-time system design, the sub-controllers and were designed as follows:
where was presented in (5) and came from the discretization of the continuous-time plant model in period T under ZOH conditions and and are the discretization of in periods T and , respectively, using ZOH techniques, as well.
4. Cost Indexes for Control Performance
In this section, three cost indexes closely related to control performance will be presented. By means of these indexes, the remote control solution may be compared with a conventional, single-rate control strategy. Similarly to [46], the indexes used were:
- , which is based on the -norm, and its goal is to provide a measure about how accurately the path was followed:where l is the number of iterations required by the AV to reach the final point of the path, is the current AV position, and is the nearest kinematic position reference to the current AV position.
- , which is based on the -norm and is defined to know the maximum difference between the desired path and the current AV position:
- , which measures the total amount of time (in seconds) elapsed to arrive at the final destination:
5. Application
In this section, control properties reached by the remote control solution will be compared to those achieved by several single-rate, conventional control approaches defined at different rates. The section is split into two parts. Firstly, the application data will be presented, that is the different parameters for the AV model, network, and control systems. Secondly, the cost indexes introduced in Section 4 will be evaluated for the different control approaches by means of a Truetime application [42]. The comparison results will show that the proposed remote control solution was able to keep the desired control properties for the AV path tracking, despite sensing at a slow rate, the existence of process and measurement noises, and considering time-varying network-induced delays and packet disorder. In addition, the control proposal achieved a significant reduction of the network bandwidth.
5.1. Data
These were the data used in the application:
- The AV was a Lego robot with two wheel motors (shown in Figure 4). Considering a similar model for both motors, the dynamic model for the relation between rotational velocity of the wheel and control signal is:where the output is in rad/s and the input in V. From (26), the consequent state space realization (4) can be obtained in order to be used in (7) to calculate the rotational velocities and then the rest of the elements of the state estimated by the EKF and the h-step-ahead state prediction stage.
- As typical in Ethernet environments [47], a generalized exponential distribution for the time-varying network-induced delays was assumed, in this case being the maximum time delay = 0.17 s. In order to avoid packet disorder, the sampling time was chosen to be = 0.2 s.
- From (26) and following classical procedures [48,49], a PI controller can be designed in order to achieve certain specifications. Taking into consideration this typical PI configuration:the controller’s gains will be tuned such as = 6 and = 0.12. In order to obtain a satisfactory control performance, the actuation period was selected to be T = 0.1 s, and hence, the multiplicity was N = 2. From these values and the discretization of (26) in period T, a dual-rate PI controller can be designed by means of (21) and (22), bringing about:
- For the comparison between dual-rate and single-rate control approaches, the continuous-time PI controller in (27) was discretized in the different periods T and . The single-rate controllers are:
- The control solution was evaluated under different levels of noise in order to study the effect of the process and sensor noises on the performance. Let us consider a lower level of noise, where both noise signals are multiplied by a lower factor F = 0.1, and a higher level of noise, where F = 0.45. By simulation, it was checked that, from F = 0.45, the robustness of the control proposal may be compromised.
- Finally, the reference to be followed included a sequence of four right angles.
5.2. Results
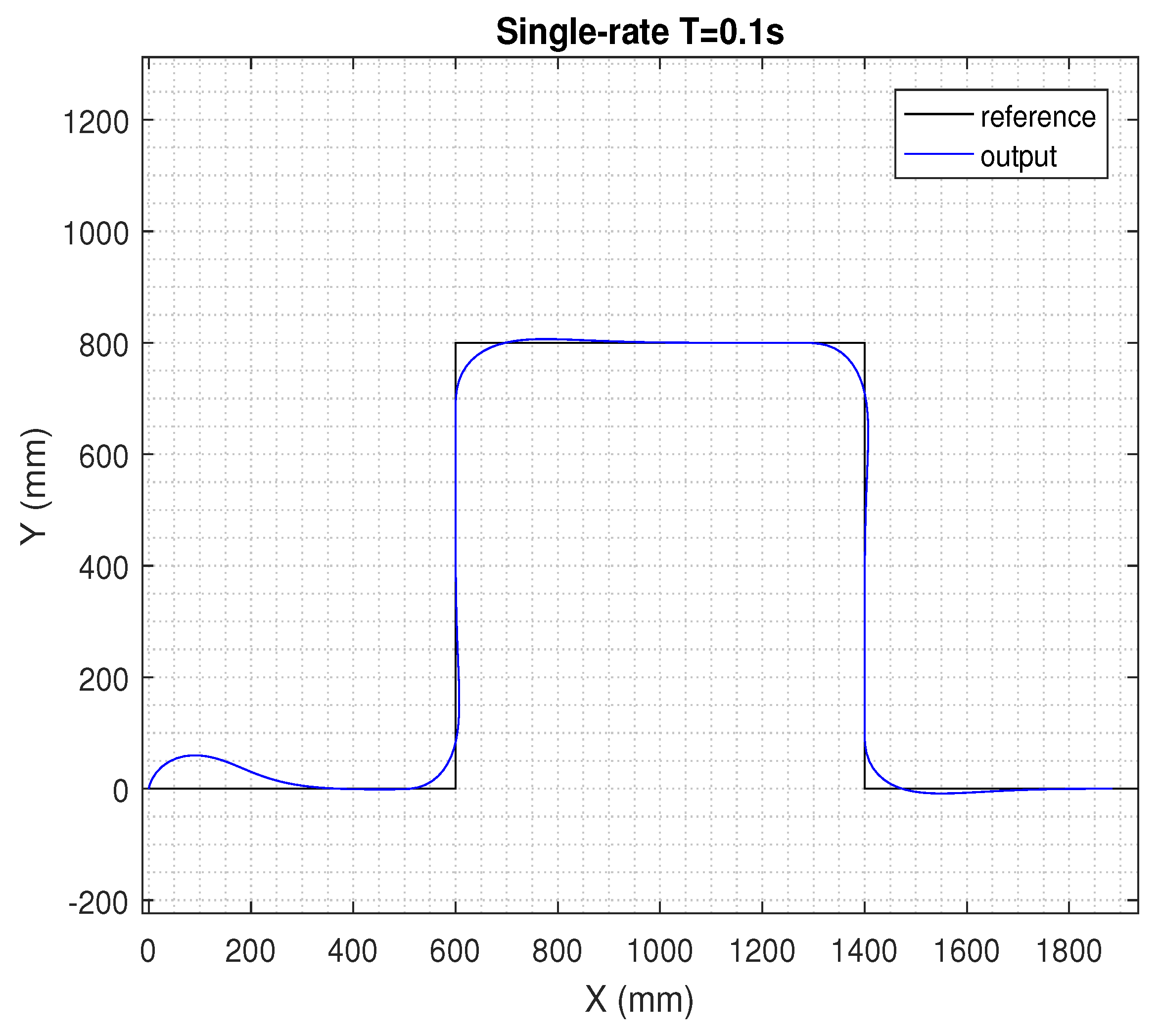
In the next figures, the path reference is depicted in black, and the trajectory followed by the AV is shown in blue.
Figure 5 shows the results for the single-rate control in period T = 0.1 s in (30). In this simulation, neither delays and noise signals, nor additional control techniques (such as EKF, h-step-ahead prediction stage, and packet-based control) were considered. Let us define the behavior depicted in Figure 5 as the nominal behavior.
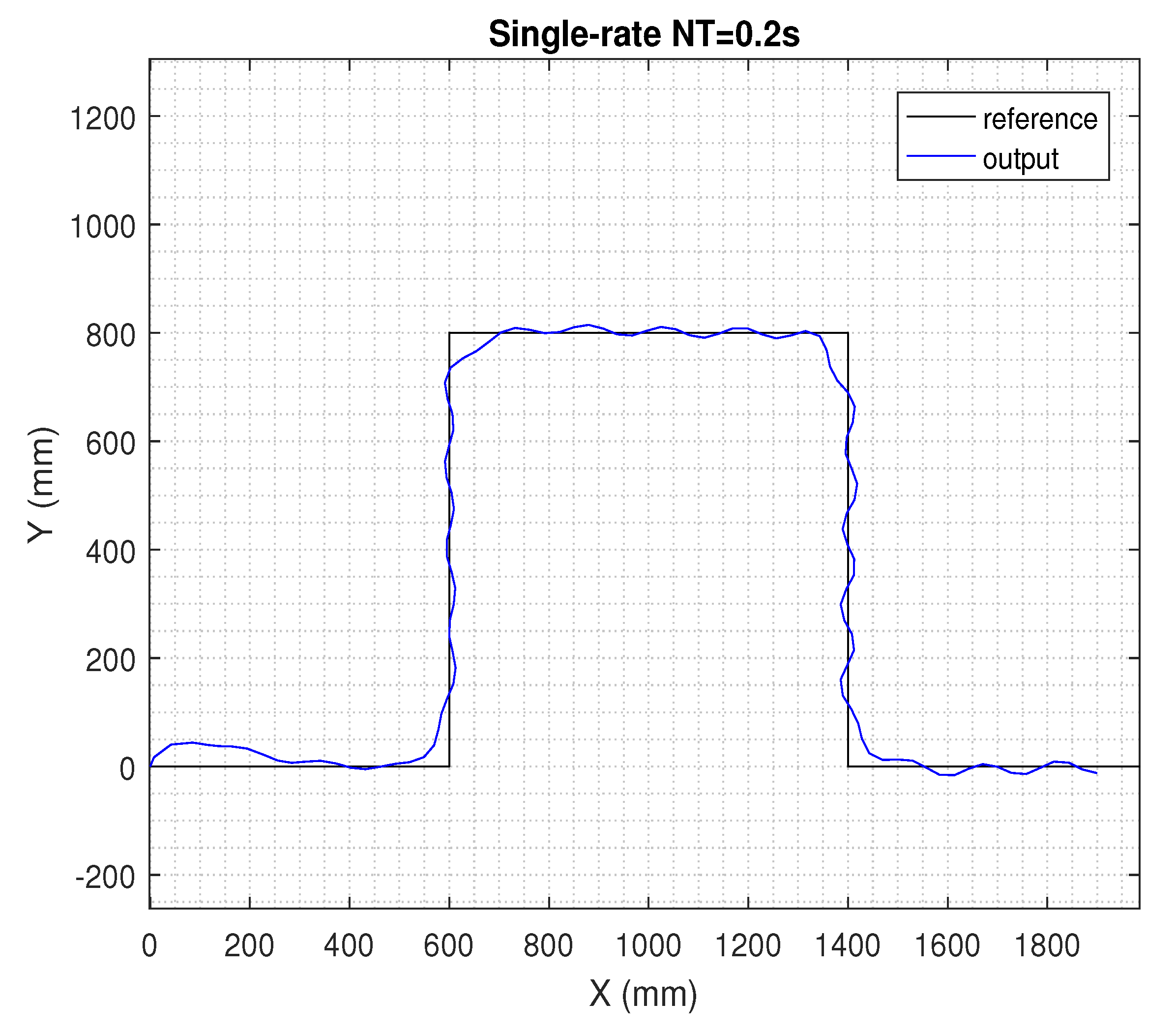
In Figure 6, the sampling period was increased twice, and then, the single-rate control in period = 0.2 s in (31) was considered. The rest of simulation conditions were the same as in the previous case. Now, compared to the single-rate version in period T = 0.1 s, the control performance clearly worsened when the AV tried to track the path.
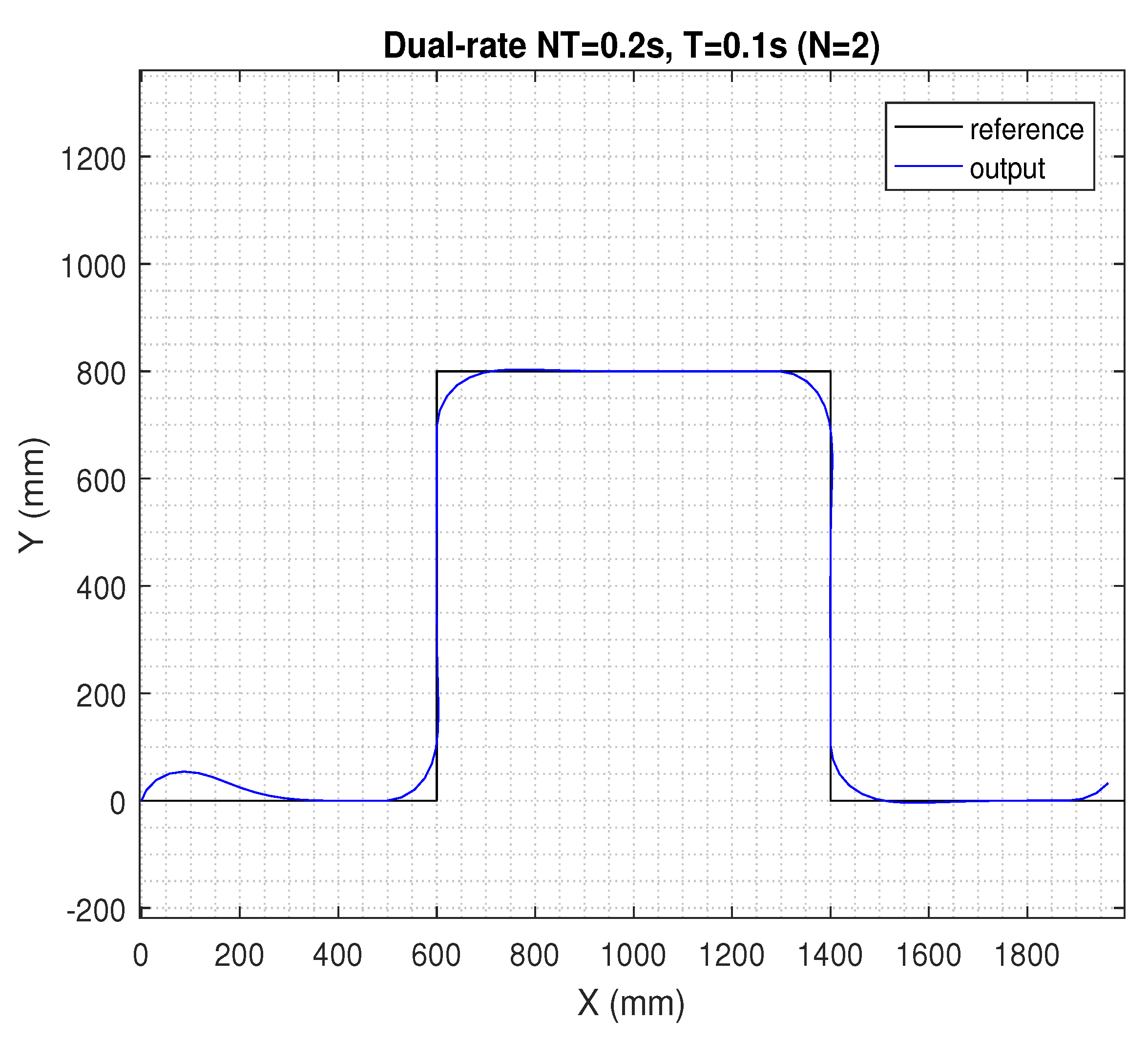
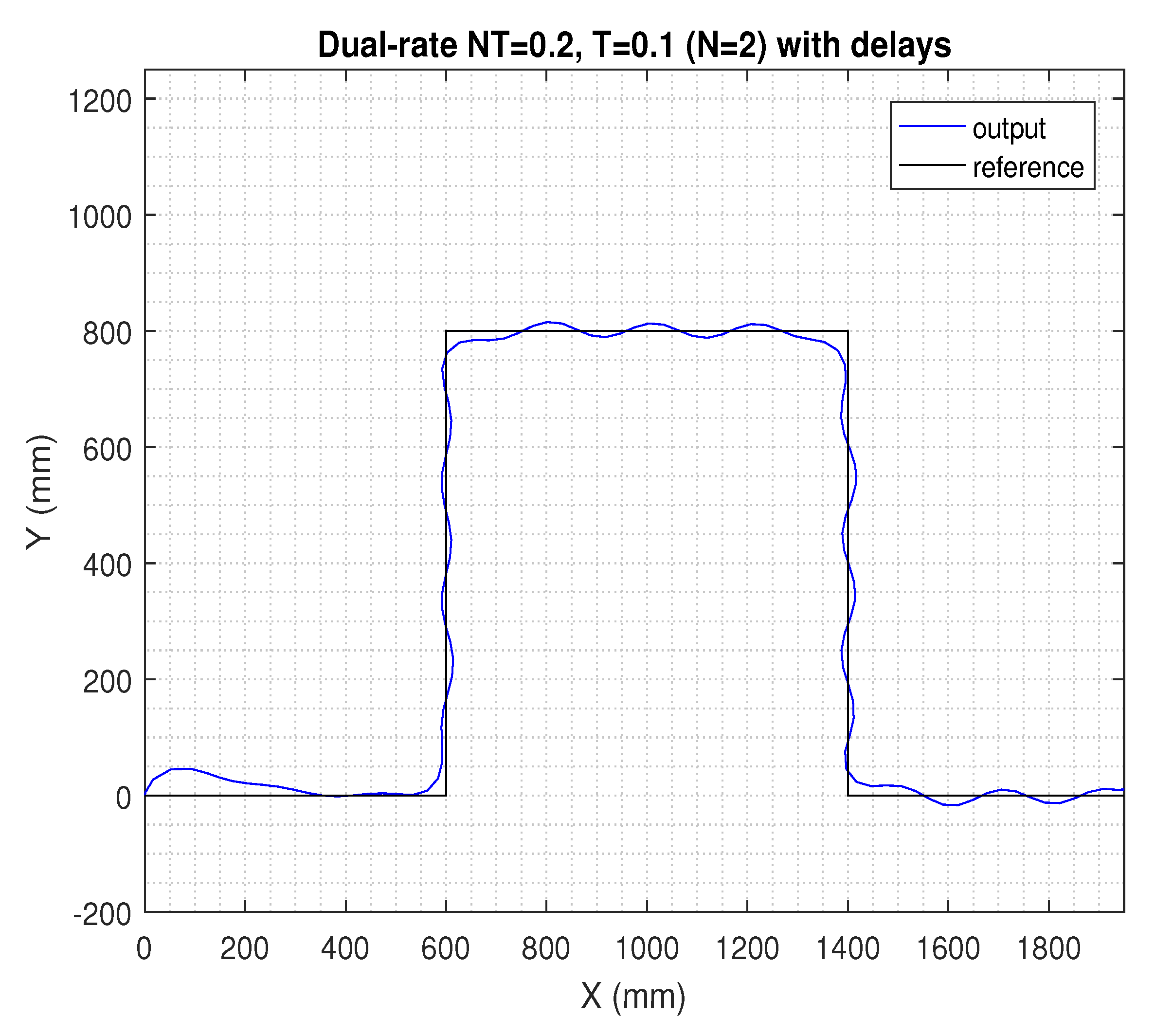
If the sensing period was kept at = 0.2 s, but the actuation period was N = 2-times faster (i.e., in period T = 0.1 s), the dual-rate control scheme in (28) and (29) could be taken into account, which was able to maintain a satisfactory control performance, being very similar to the nominal one (see Figure 7). However, if time-varying network-induced delays were included in the dual-rate control framework, the AV’s behavior clearly worsened, as depicted in Figure 8.
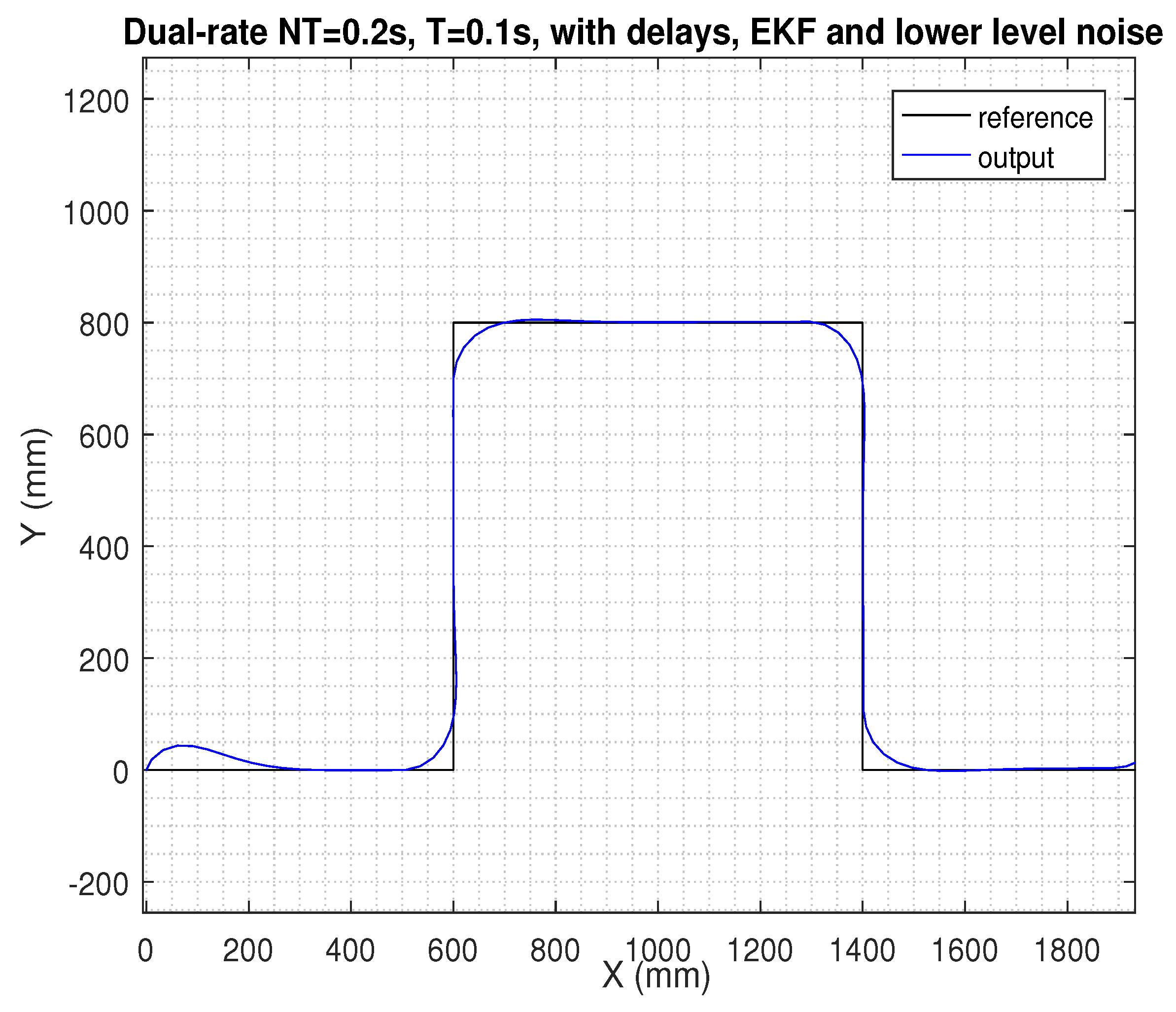
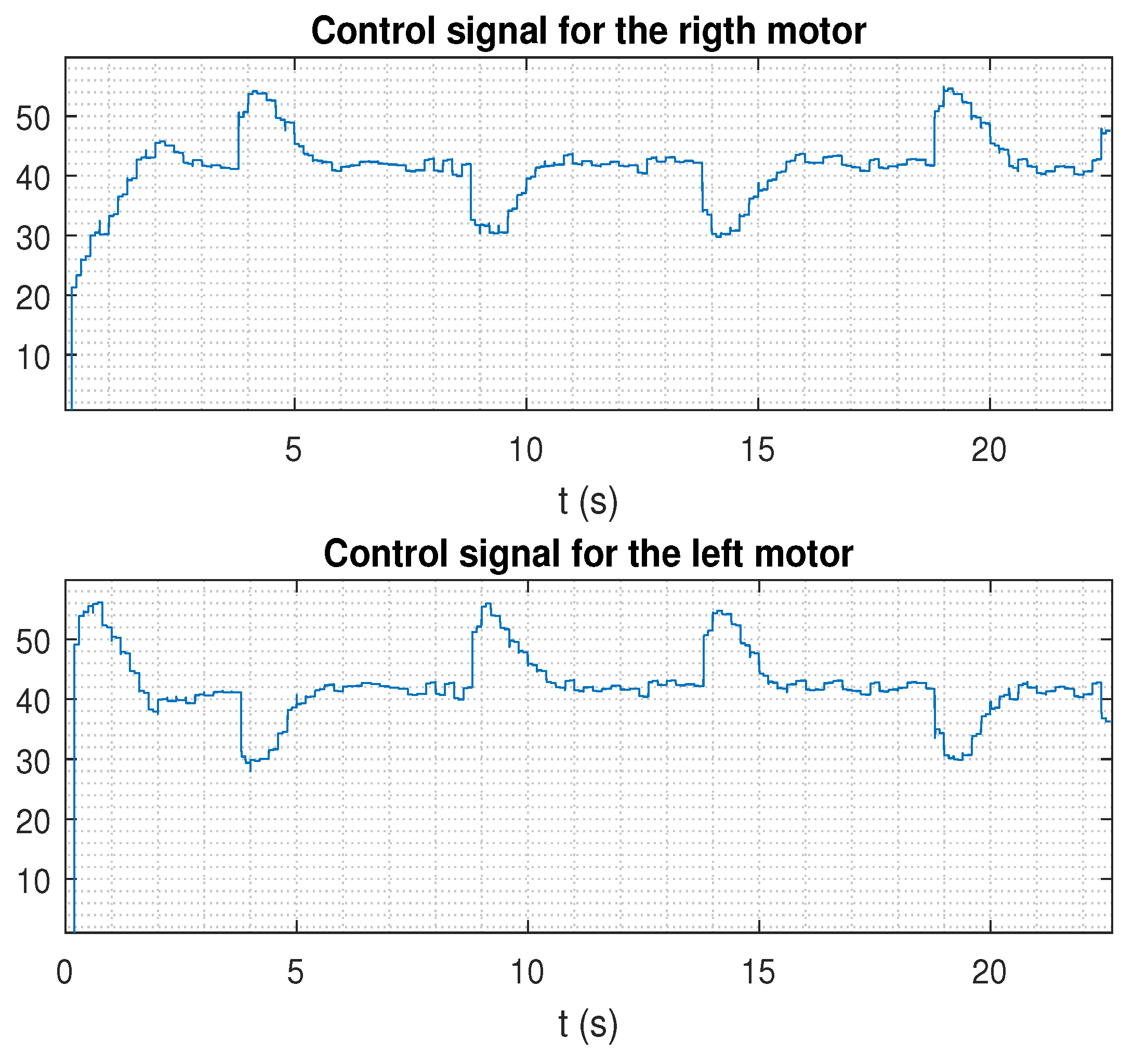
Finally, despite existing time-varying delays and noise, if the additional control techniques proposed in this work such as EKF, h-step-ahead prediction stage, and packet-based control were integrated in the dual-rate control scheme, control performance was clearly improved, keeping the nominal behavior (see in Figure 9, where the case for the lower level of noise was considered; Figure 10 shows the control signal for this case). In addition, state estimates can be received at the remote server for further upper level tasks. In Table 1, an example considering h = 1 is given, where the set of estimations was . Note that the first value of the set of estimations was the corrected system state, and the second value was the estimation of the next state. A slight correction of the state can be observed iteration by iteration.
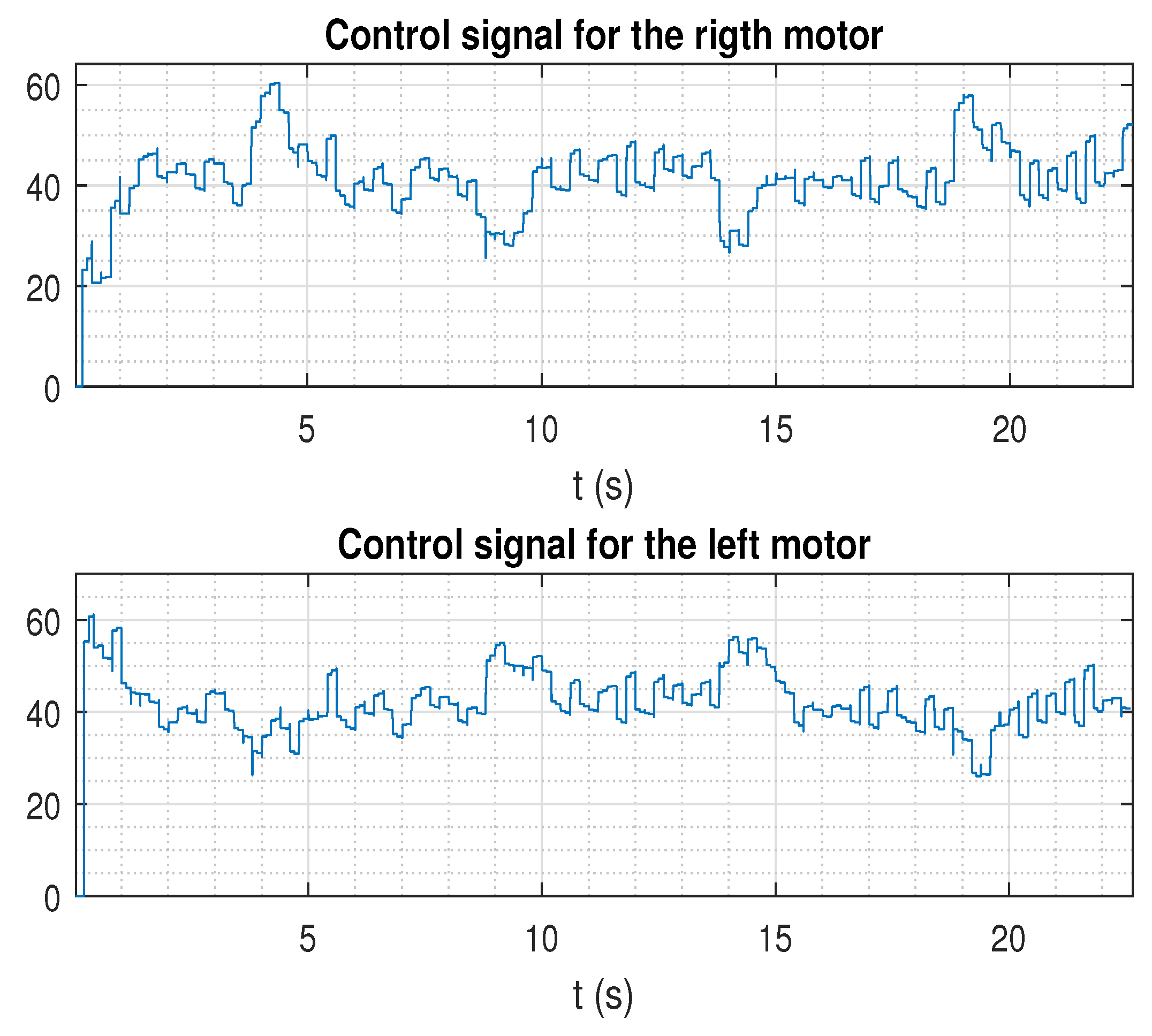
The two last figures are presented (Figure 11 and Figure 12), where the same previous control solution was simulated, but now considering the case for the higher level of noise. As depicted, the control signal was affected by this significant magnitude of noise, which negatively affected path tracking control. Since this case represents an extreme level of noise, it will not be considered in the next study.
To analyze the previous conclusions in more detail, the cost indexes presented in Section 4 were calculated for every scenario. Table 2 shows these results, where each scenario is represented by the following letters:
- a: single-rate control scenario in period T.
- b: single-rate control scenario in period .
- c: dual-rate control scenario.
- d: dual-rate control scenario with delays.
- e: dual-rate control scenario, adding EKF, h-step-ahead prediction stage, and packet-based control. Delays and a lower level of noise were considered.
As previously mentioned, the desired, nominal performance was presented by Scenario a, and hence, its showed the reference values to carry out the comparison. As expected, Scenarios b and d showed the worst (62% worse than the nominal value), since the desired trajectory was inaccurately followed by the AV. Scenarios c and e showed a similar as Scenario a (even 1% better). Regarding index , it was worsened around 16% by Scenarios b and d compared to the nominal performance, which was practically reached by Scenarios c and e. Index presented similar values for every case, differing only by with respect to the nominal value. Finally, it is worthy to note that Scenarios b, c, d, and e were able to reduce the use of the network by 50%, due to sampling it twice slower. This fact implies considerable bandwidth saving.
In summary, the proposed remote control solution was able to keep the desired control properties for the AV path tracking, despite slow sensing and the existence of noise and wireless communication problems such as time-varying delays. In addition, the control proposal significantly reduced network resource usage (50%), avoided packet disorder, and provided the remote server with future system information.
6. Conclusions
A novel remote control solution for AV path tracking was presented, which integrated dual-rate control, packed-based control, extended Kalman filtering, and prediction-based control techniques. A desired, nominal control performance was defined by a single-rate control at a fast rate in an ideal framework, where no wireless communication problems (such as time-varying delays and packet disorder) and no noise effect were considered. The proposal was able to reach the nominal behavior, despite communication problems and noise existing and despite sensing at a slow rate due to technical constraints introduced by the zenithal camera. In addition, the control approach enabled lessening the amount of transmission through the network, which can be decreased N times in comparison with the ideal framework, resulting in significant bandwidth savings.
Author Contributions
Conceptualization, Á.C., W.Z., and C.T.; methodology, Á.C., W.Z., J.S., and M.T.; software, Á.C., C.T., J.S., and J.A.; formal analysis, Á.C. and J.A.; writing, original draft preparation, Á.C.; writing, review and editing, Á.C., W.Z., J.S., J.A., C.T., and M.T.; supervision, J.S. and M.T.; funding acquisition, Á.C. and J.S.
Funding
This research work has been developed as a result of a mobility stay funded by Spanish Ministry of Education under “Programa Estatal de Promoción del Talento y su Empleabilidad en I+D+i, Subprograma Estatal de Movilidad, del Plan Estatal de Investigación Científica y Técnica y de Innovación 2013–2016”. In addition, the research was funded in part by Grant RTI2018-096590-B-I00 from the Spanish government and by the European Commission as part of Project H2020-SEC-2016-2017, Topic: SEC-20-BES-2016, ID: 740736, “C2 Advanced Multi-domain Environment and Live Observation Technologies” (CAMELOT). Part WP5 supported by Tekever ASDS, Thales Research and Technology, Viasat Antenna Systems, Universitat Politècnica de València, Fundação da Faculdade de Ciências da Universidade de Lisboa, Ministério da Defensa Nacional, Marinha Portuguesa, and Ministério da Administração Interna Guarda Nacional Republicana.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AV | Autonomous Vehicle |
| IMU | Inertial Measurement Unit |
| EKF | Extended Kalman Filter |
| ZOH | Zero Order Hold |
| LAD | Look Ahead Distance |
References
- Gupta, R.A.; Chow, M.Y. Networked control system: Overview and research trends. IEEE Trans. Ind. Electron. 2010, 57, 2527–2535. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, H.; Kaynak, O. Network-induced constraints in networked control systems: A survey. IEEE Trans. Ind. Inform. 2013, 9, 403–416. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Yu, X. Survey on recent advances in networked control systems. IEEE Trans. Ind. Inform. 2016, 12, 1740–1752. [Google Scholar] [CrossRef]
- Zhang, D.; Shi, P.; Wang, Q.G.; Yu, L. Analysis and synthesis of networked control systems: A survey of recent advances and challenges. ISA Trans. 2017, 66, 376–392. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.B.; Liu, G.P.; Kang, Y.; Yu, L. Exploring the Different Delay Effects in Different Channels in Networked Control Systems. In Packet-Based Control for Networked Control Systems; Springer: Singapore, 2018; pp. 99–113. [Google Scholar]
- Zhang, W.; Tomizuka, M.; Wu, P.; Wei, Y.H.; Leng, Q.; Han, S.; Mok, A.K. A double disturbance observer design for compensation of unknown time delay in a wireless motion control system. IEEE Trans. Control Syst. Technol. 2018, 26, 675–683. [Google Scholar] [CrossRef]
- Cuenca, A.; Antunes, D.J.; Castillo, A.; García, P.; Khashooei, B.A.; Heemels, W. Periodic event-triggered sampling and dual-rate control for a wireless networked control system with applications to UAVs. IEEE Trans. Ind. Electron. 2019, 66, 3157–3166. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. Event-triggered dynamic output feedback control for networked control systems. IET Control Theory Appl. 2014, 8, 226–234. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yen, K.K.; Abdelghani, M.N. Preventing time-delay switch attack on load frequency control in distributed power systems. IEEE Trans. Smart Grid 2015, 7, 1176–1185. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yen, K.K.; Abdelghani, M.N.; Sargolzaei, S.; Carbunar, B. Resilient design of networked control systems under time delay switch attacks, application in smart grid. IEEE Access 2017, 5, 15901–15912. [Google Scholar] [CrossRef]
- Zhang, W.; Bae, J.; Tomizuka, M. Modified preview control for a wireless tracking control system with packet loss. IEEE/ASME Trans. Mechatron. 2015, 20, 299–307. [Google Scholar] [CrossRef]
- Wang, Y.L.; Han, Q.L. Network-based modelling and dynamic output feedback control for unmanned marine vehicles in network environments. Automatica 2018, 91, 43–53. [Google Scholar] [CrossRef]
- Alcaina, J.; Cuenca, A.; Salt, J.; Casanova, V.; Pizá, R. Delay-independent dual-rate PID controller for a packet-based networked control system. Inf. Sci. 2019, 484, 27–43. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, W.; Chen, B.; Yu, L. Networked filtering with Markov transmission delays and packet disordering. IET Control Theory Appl. 2017, 12, 687–693. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, W.; Yu, L.; Liu, S.; Chen, M.Z. New results on stabilization of networked control systems with packet disordering. Automatica 2015, 52, 255–259. [Google Scholar] [CrossRef] [Green Version]
- Lian, B.; Zhang, Q.; Li, J. Sliding mode control and sampling rate strategy for Networked control systems with packet disordering via Markov chain prediction. ISA Trans. 2018, 83, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Cheng, L.L.; Zhan, X.S.; Wu, J.; Han, T. An Optimal Tracking Performance of MIMO NCS with Quantization and Bandwidth Constraints. Asian J. Control 2019, 21, 1–12. [Google Scholar] [CrossRef]
- Julio, R.E.; Bastos, G.S. A ROS package for dynamic bandwidth management in multi-robot systems. In Robot Operating System (ROS); Springer: Cham, Switzerland, 2017; pp. 309–341. [Google Scholar]
- Casanova, V.; Salt, J.; Cuenca, A.; Piza, R. Networked Control Systems: control structures with bandwidth limitations. Int. J. Syst. Control Commun. 2009, 1, 267–296. [Google Scholar] [CrossRef]
- Lozano-Perez, T. Autonomous Robot Vehicles; Springer: Secaucus, NJ, USA, 2012. [Google Scholar]
- Gámez Serna, C.; Ruichek, Y. Dynamic speed adaptation for path tracking based on curvature information and speed limits. Sensors 2017, 17, 1383. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Clavijo, M.; Jiménez, F.; Gomez, O.; Rivera, J.L.; Anguita, M. Autonomous vehicle for surveillance missions in off-road environment. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 98–103. [Google Scholar]
- Vaquero, V.; Repiso, E.; Sanfeliu, A. Robust and real-time detection and tracking of moving objects with minimum 2D LIDAR information to advance autonomous cargo handling in ports. Sensors 2019, 19, 107. [Google Scholar] [CrossRef]
- Chen, J.; Zhan, W.; Tomizuka, M. Autonomous Driving Motion Planning with Constrained Iterative LQR. IEEE Trans. Intell. Veh. 2019, 4, 244–254. [Google Scholar] [CrossRef]
- Hellstrom, T.; Ringdahl, O. Follow the Past: a path-tracking algorithm for autonomous vehicles. Int. J. Veh. Auton. Syst. 2006, 4, 216–224. [Google Scholar] [CrossRef]
- Li, Z.; Wang, B.; Gong, J.; Gao, T.; Lu, C.; Wang, G. Development and Evaluation of Two Learning-Based Personalized Driver Models for Pure Pursuit Path-Tracking Behaviors. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 79–84. [Google Scholar]
- Lundgren, M. Path Tracking and Obstacle Avoidance for a Miniature Robot. Master’s Thesis, Umeå University, Umeå, Sweden, 2003. [Google Scholar]
- Falcone, P.; Borrelli, F.; Tseng, H.E.; Asgari, J.; Hrovat, D. A hierarchical model predictive control framework for autonomous ground vehicles. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3719–3724. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Haykin, S. Kalman Filtering and Neural Networks; Wiley Online Library: New York, NY, USA, 2001. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina: Chapel Hill, NC, USA, 2006; Volume 378. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: New York, NY, USA, 2006. [Google Scholar]
- Zhang, X.M.; Han, Q.L. Network-based H∞ filtering using a logic jumping-like trigger. Automatica 2013, 49, 1428–1435. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Tomizuka, M. Extended kalman filtering for robot joint angle estimation using mems inertial sensors. IFAC Proc. Vol. 2013, 46, 406–413. [Google Scholar] [CrossRef]
- Zhao, Y.B.; Liu, G.P.; Rees, D. Design of a packet-based control framework for networked control systems. IEEE Trans. Control Syst. Technol. 2009, 17, 859–865. [Google Scholar] [CrossRef]
- Cuenca, A.; Alcaina, J.; Salt, J.; Casanova, V.; Pizá, R. A packet-based dual-rate PID control strategy for a slow-rate sensing Networked Control System. ISA Trans. 2018, 76, 155–166. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salt, J.; Albertos, P. Model-Based Multirate Controllers Design. IEEE Trans. Control Syst. Technol. 2005, 13, 988–997. [Google Scholar] [CrossRef]
- Salt, J.; Cuenca, Á.; Palau, F.; Dormido, S. A Multirate Control Strategy to the Slow Sensors Problem: An Interactive Simulation Tool for Controller Assisted Design. Sensors 2014, 14, 4086–4110. [Google Scholar] [CrossRef] [Green Version]
- Mansano, R.; Godoy, E.; Porto, A. The benefits of soft sensor and multi-rate control for the implementation of wireless networked control systems. Sensors 2014, 14, 24441–24461. [Google Scholar] [CrossRef]
- Tomizuka, M. Multi-rate control for motion control applications. In Proceedings of the 8th IEEE International Workshop on Advanced Motion Control, Kawasaki, Japan, 28 March 2004; pp. 21–29. [Google Scholar]
- Bolot, J.C. End-to-end packet delay and loss behavior in the Internet. In ACM SIGCOMM Computer Communication Review; ACM: New York, NY, USA, 1993; Volume 23, pp. 289–298. [Google Scholar]
- Cervin, A.; Henriksson, D.; Lincoln, B.; Eker, J.; Arzen, K.E. How does control timing affect performance? Analysis and simulation of timing using Jitterbug and TrueTime. IEEE Control Syst. 2003, 23, 16–30. [Google Scholar] [Green Version]
- Cooklev, T.; Eidson, J.C.; Pakdaman, A. An implementation of IEEE 1588 over IEEE 802.11 b for synchronization of wireless local area network nodes. IEEE Trans. Instrum. Meas. 2007, 56, 1632–1639. [Google Scholar] [CrossRef]
- Fukao, T.; Nakagawa, H.; Adachi, N. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans. Robot. Autom. 2000, 16, 609–615. [Google Scholar] [CrossRef]
- Khargonekar, P.; Poolla, K.; Tannenbaum, A. Robust control of linear time-invariant plants using periodic compensation. IEEE Trans. Autom. Control 1985, 30, 1088–1096. [Google Scholar] [CrossRef]
- Cuenca, Á.; Ojha, U.; Salt, J.; Chow, M.Y. A non-uniform multi-rate control strategy for a Markov chain-driven Networked Control System. Inf. Sci. 2015, 321, 31–47. [Google Scholar] [CrossRef] [Green Version]
- Tipsuwan, Y.; Chow, M. Gain scheduler middleware: A methodology to enable existing controllers for networked control and teleoperation-part I: networked control. IEEE Trans. Ind. Electron. 2004, 51, 1218–1227. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 1995; Volume 2. [Google Scholar]
- Astrom, K.; Hagglund, T. PID Controllers: Theory, Design, and Tuning; Instrument Society of America: Research Triangle Park, NC, USA, 1995; pp. 80–81. [Google Scholar]
Figure 1.
Remote control structure for an autonomous vehicle.

Figure 2.
Time axis example for the remote-to-local channel.

Figure 3.
Time axis example for the local-to-remote channel.

Figure 4.
Lego robot.

Figure 5.
Results for the single-rate control at T = 0.1 s.

Figure 6.
Results for the single-rate control at NT = 0.2 s.

Figure 7.
Results for the dual-rate control at NT = 0.2 s and T = 0.1 s.

Figure 8.
Results for the dual-rate control with delays.

Figure 9.
Results for the control proposal (EKF, prediction stage, and packet-based control) with delays and a lower level of noise.
Figure 9.
Results for the control proposal (EKF, prediction stage, and packet-based control) with delays and a lower level of noise.

Figure 10.
Control signal for the control proposal (EKF, prediction stage, and packet-based control) with delays and a lower level of noise.
Figure 10.
Control signal for the control proposal (EKF, prediction stage, and packet-based control) with delays and a lower level of noise.

Figure 11.
Results for the control proposal (EKF, prediction stage, and packet-based control) with delays and a higher level of noise.
Figure 11.
Results for the control proposal (EKF, prediction stage, and packet-based control) with delays and a higher level of noise.

Figure 12.
Control signal for the control proposal (EKF, prediction stage, and packet-based control) with delays and a higher level of noise.
Figure 12.
Control signal for the control proposal (EKF, prediction stage, and packet-based control) with delays and a higher level of noise.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Example for h = 1.
| k | ||
|---|---|---|
| 0 | ||
| 1 | ||
| 2 | ||
| 3 |
Table 2.
Cost indexes for each scenario.
| Index | a | b | c | d | e |
|---|---|---|---|---|---|
| 1043.4 | 1671.8 | 1029.9 | 1684.4 | 1030.0 | |
| 38.76 | 44.55 | 38.33 | 44.33 | 38.97 | |
| 22.0 s | 22.4 s | 22.0 s | 21.6 s | 21.6 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Cuenca, Á.; Zhan, W.; Salt, J.; Alcaina, J.; Tang, C.; Tomizuka, M. A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control. Sensors 2019, 19, 2983. https://doi.org/10.3390/s19132983
AMA Style
Cuenca Á, Zhan W, Salt J, Alcaina J, Tang C, Tomizuka M. A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control. Sensors. 2019; 19(13):2983. https://doi.org/10.3390/s19132983
Chicago/Turabian StyleCuenca, Ángel, Wei Zhan, Julián Salt, José Alcaina, Chen Tang, and Masayoshi Tomizuka. 2019. "A Remote Control Strategy for an Autonomous Vehicle with Slow Sensor Using Kalman Filtering and Dual-Rate Control" Sensors 19, no. 13: 2983. https://doi.org/10.3390/s19132983
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.