
An Accurate Non-Cooperative Method for Measuring Textureless Spherical Target Based on Calibrated Lasers


Abstract
:1. Introduction
2. Extrinsic Calibration
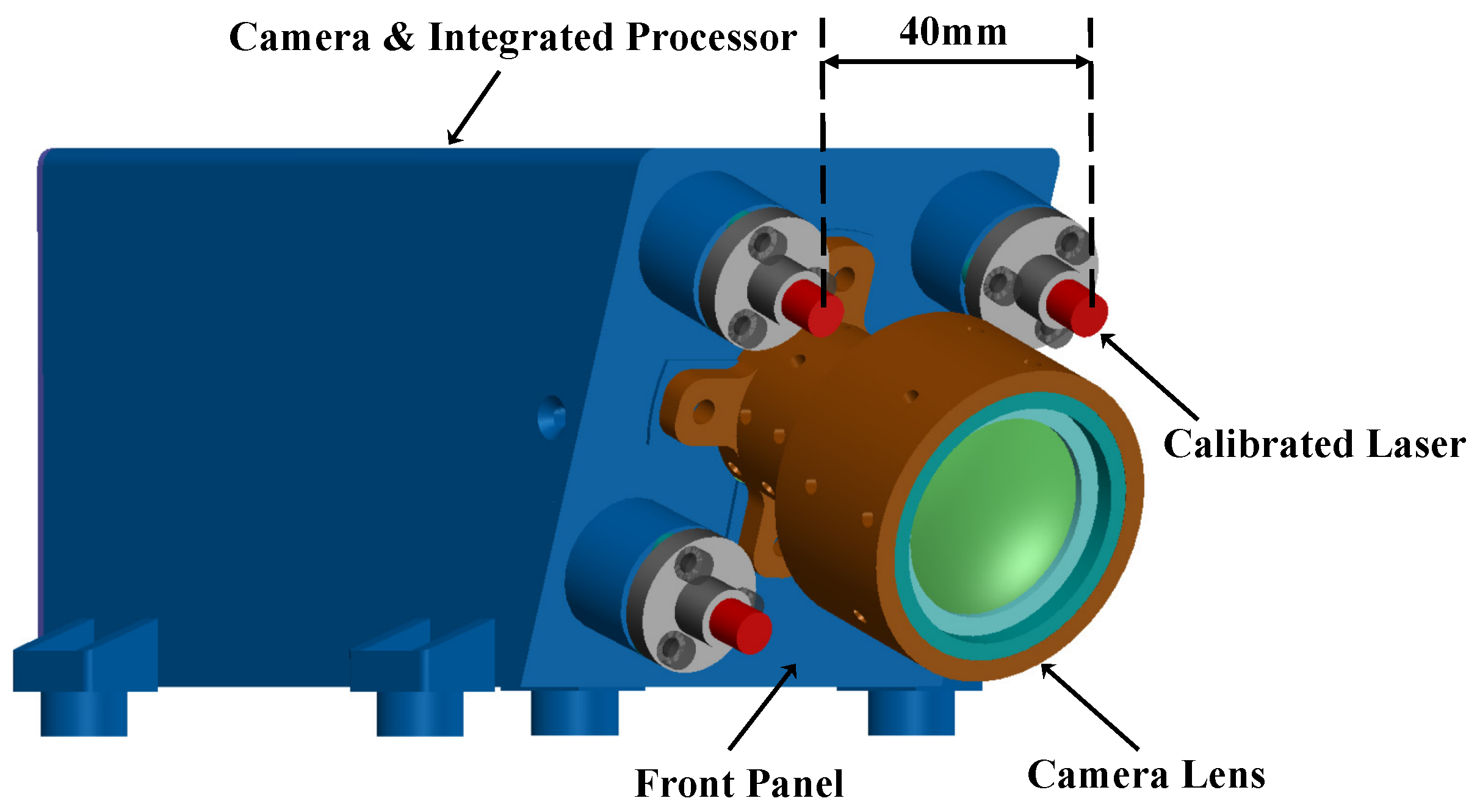
2.1. System Description
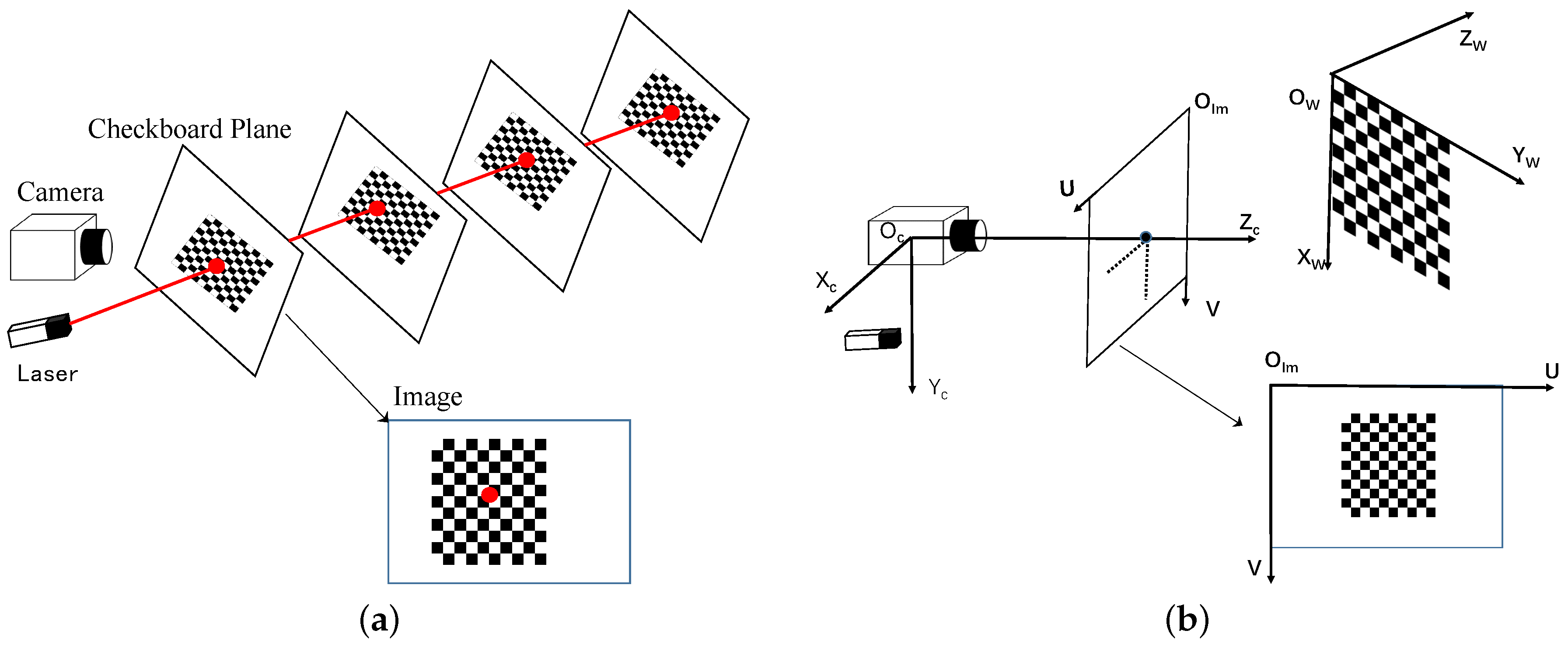
2.2. Description of the Calibration Coordinate Frame
2.3. Extrinsic Calibration Algorithm
- The laser spot is on the line that goes through the camera optical center and the laser spot. We call this the optical line for convenience.
- The laser spot is on the plane of the checkerboard.
- First, calculate the center point of all of the laser spots .
- Second, normalize all of the laser spots .
- Third, compute the covariance matrix , and compute the eigenvectors of the covariance matrix
- Then, the direction vector of laser beam i can be .
3. Measurement Algorithm Description
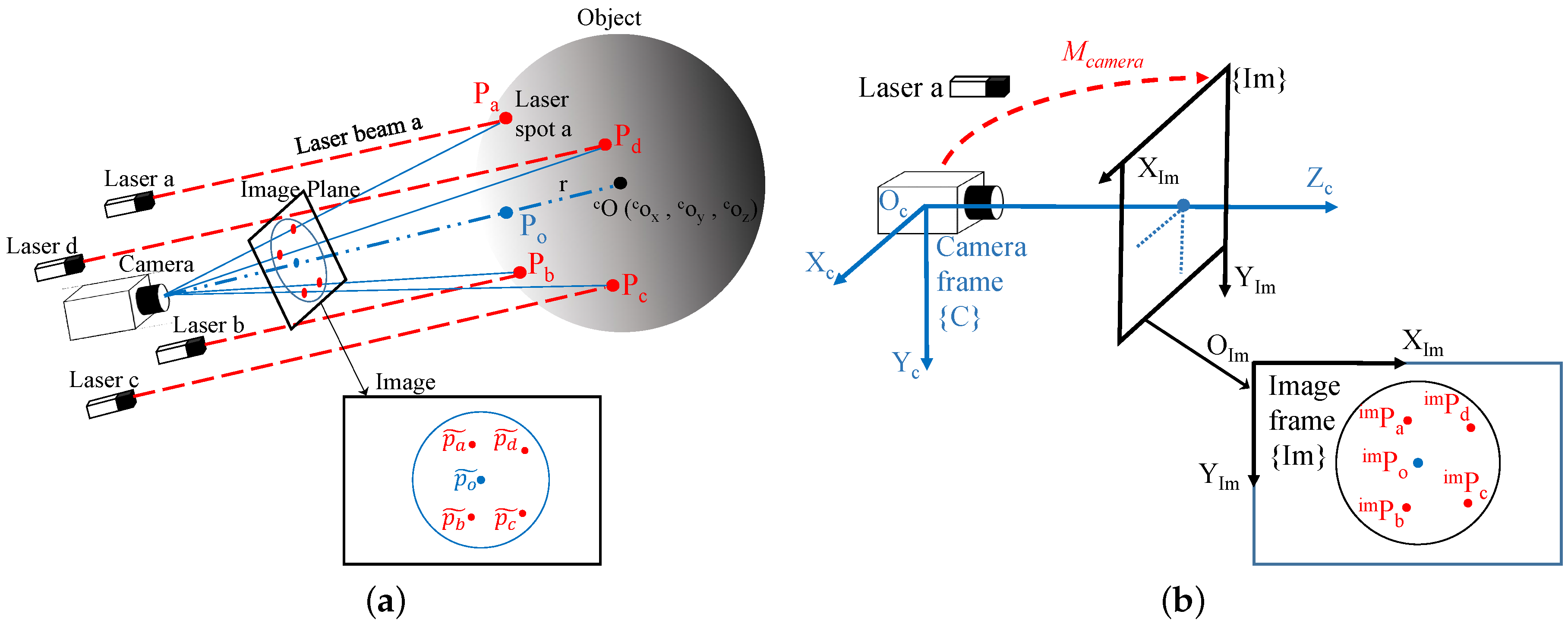
3.1. Description of the Reconstruction Coordinate Frame
3.2. Initial Guess of Geometric Parameters
- The laser spot is on the optical line.
- The laser spot is on the laser beam that has been calibrated in the prior section.
3.3. Nonlinear Optimization
3.3.1. Formulation of the Reconstruction Function
- The laser spot is on the surface of the target sphere.
- The laser spot is on the laser beam that has been calibrated in the prior section.
3.3.2. Formulation of the Reprojection Point
3.4. Algorithm Summary
- Use the checkerboard, and place it in front of the camera-laser system in different orientations to calibrate the intrinsic and extrinsic parameters of the system.
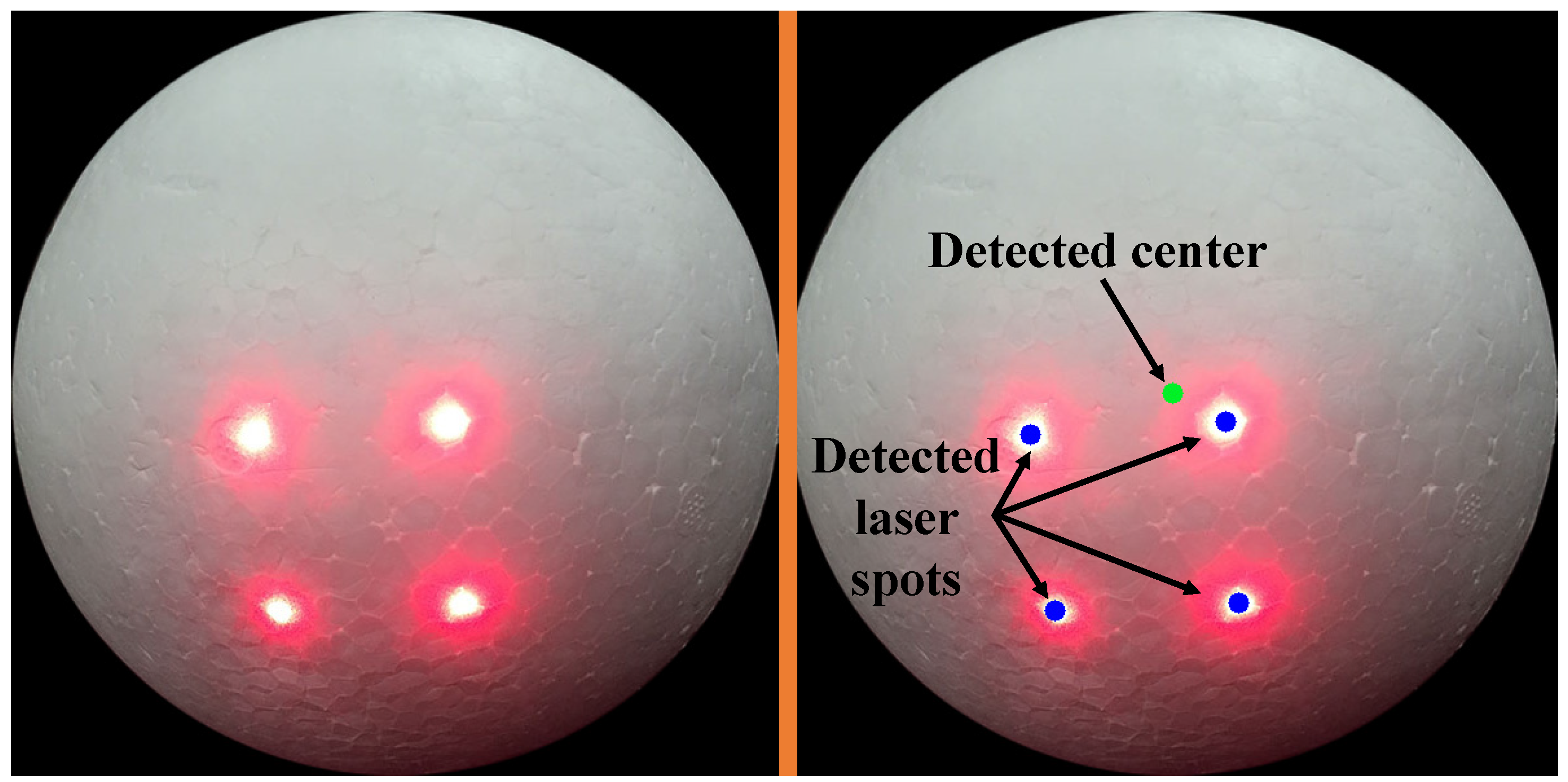
- Take an image with the target, and detect the laser spots and the center of the projected circle.
- Estimate the geometric parameters and using the method described in Section 3.2.
- Build the cost function Equation (16) with the derivation in Section 3.3, and optimize and r by using the Levenberg–Marquardt method.
4. Experimental Results
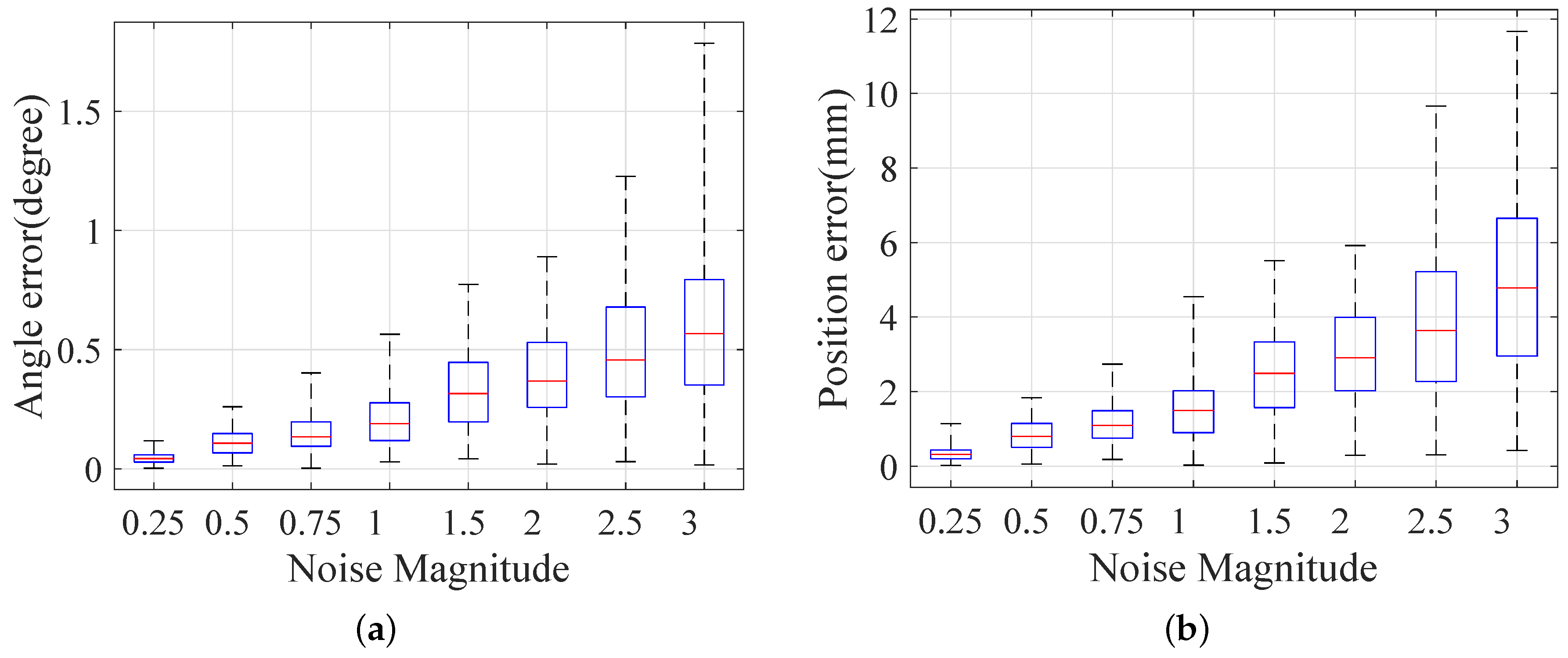
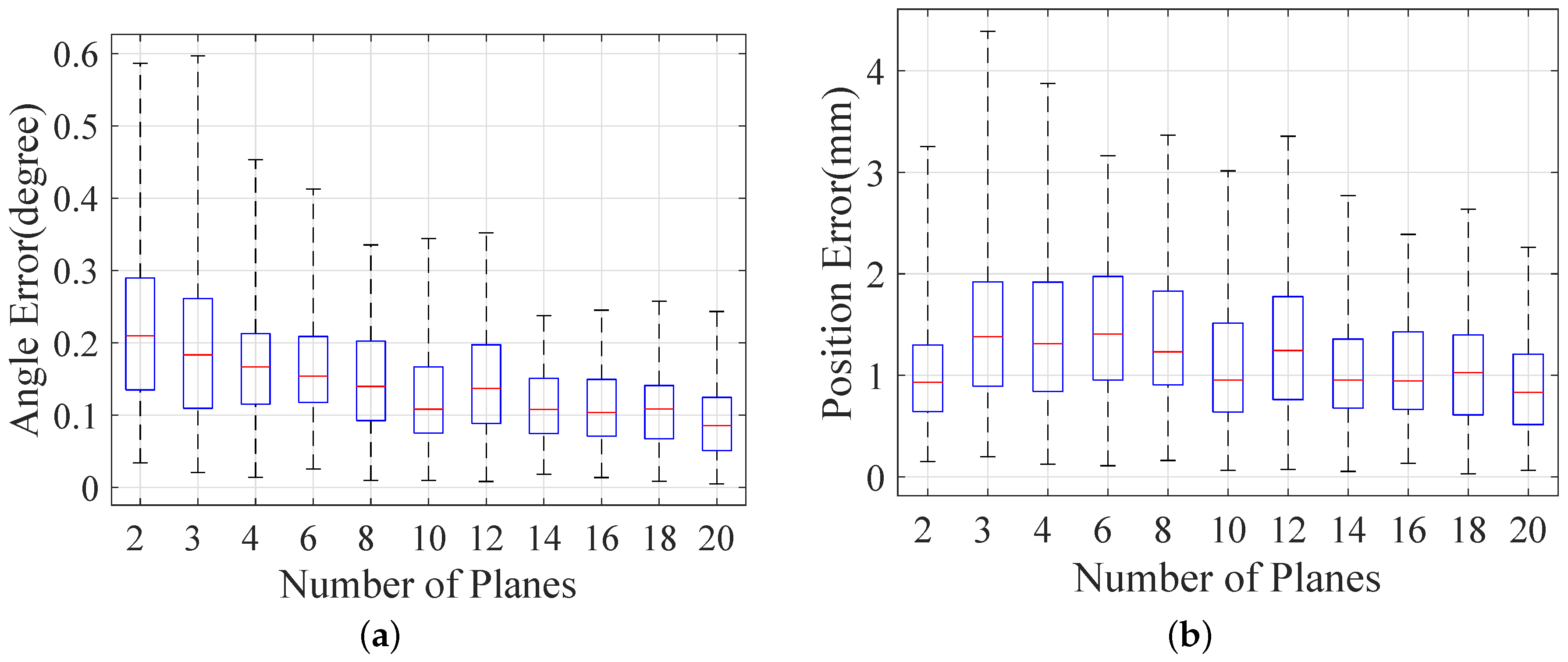
4.1. Simulation of Extrinsic Calibration
- Different magnitudes reprojection noises with the same amount of poses.
- Different numbers of poses with the same magnitude of reprojection noise.
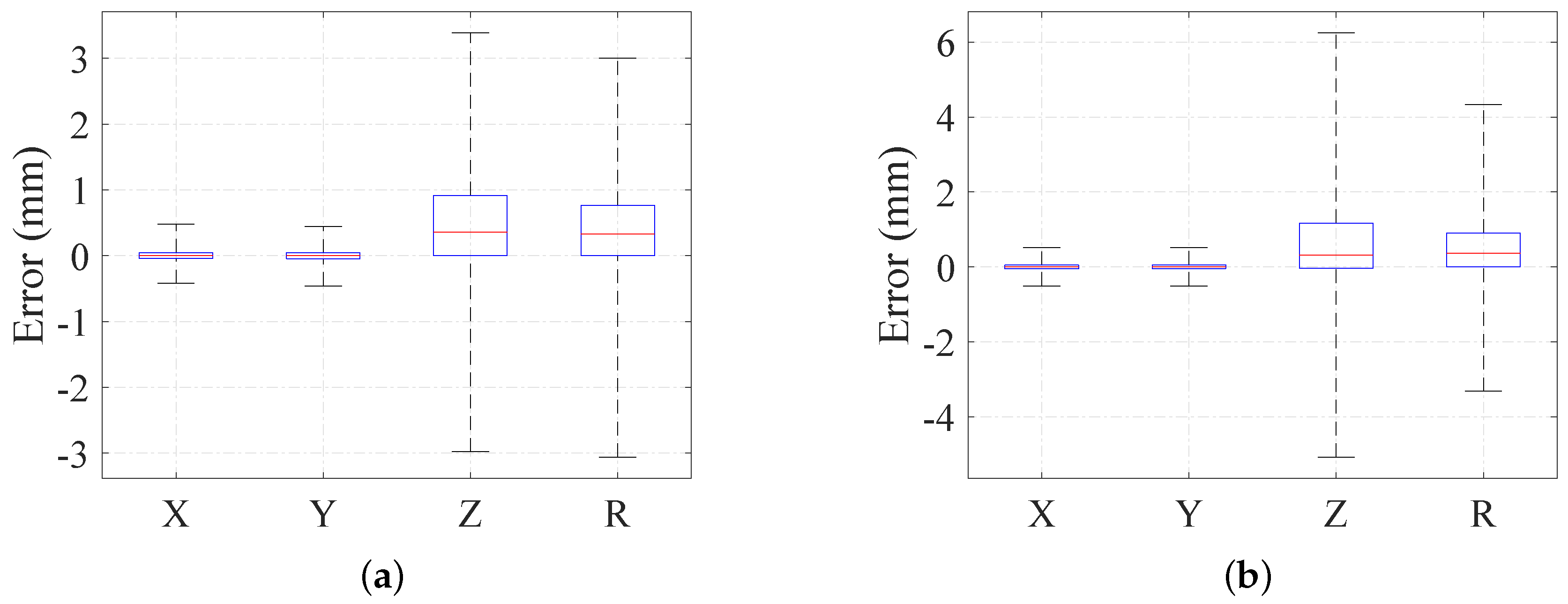
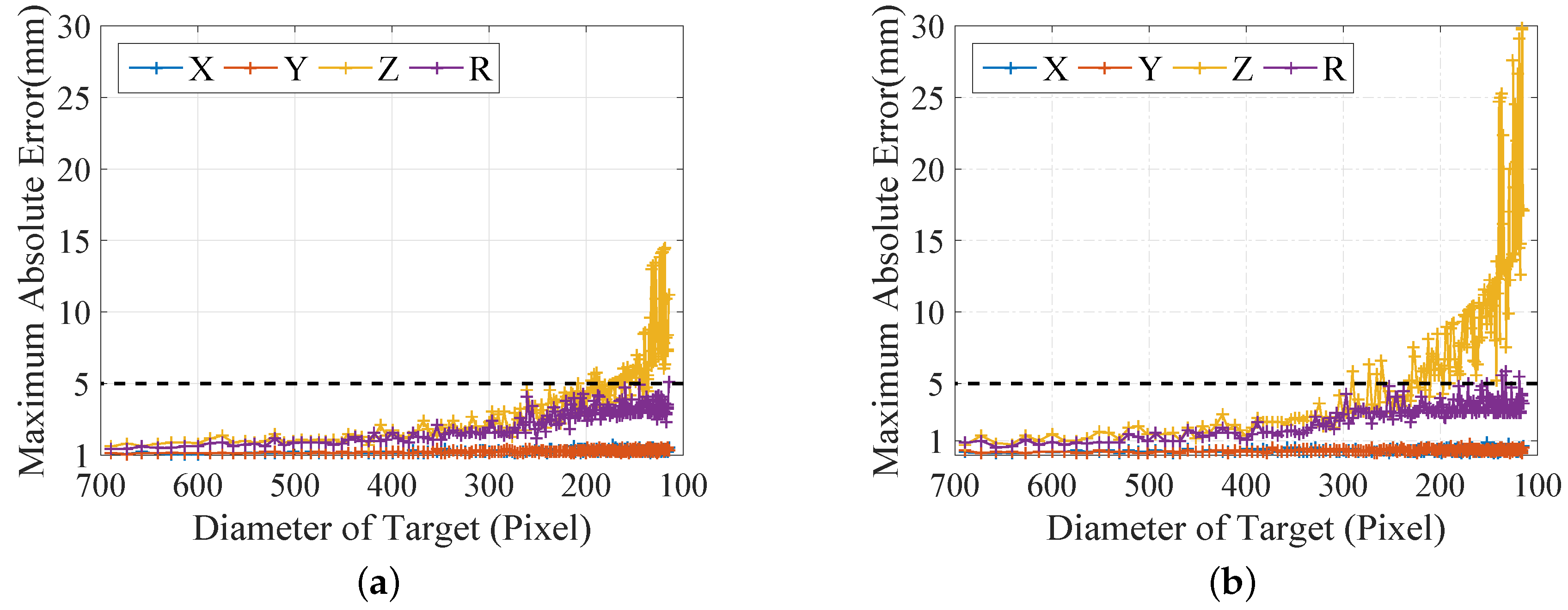
4.2. Simulation of Target Measurement
4.3. Field Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fang, Y.; Liu, X.; Zhang, X. Adaptive Active Visual Servoing of Nonholonomic Mobile Robots. IEEE Trans. Ind. Electron. 2012, 59, 486–497. [Google Scholar] [CrossRef]
- Chung, T.H.; Hollinger, G.A.; Isler, V. Search and pursuit-evasion in mobile robotics. Auton. Robots 2011, 31, 299–316. [Google Scholar] [CrossRef]
- Kim, Y.K.; Kim, Y.; Jung, Y.S.; Jang, I.G.; Kim, K.S.; Kim, S.; Kwak, B.M. Developing Accurate Long-Distance 6-DOF Motion Detection with One-Dimensional Laser Sensors: Three-Beam Detection System. IEEE Trans. Ind. Electron. 2013, 60, 3386–3395. [Google Scholar]
- Kim, Y.K.; Kim, Y.; Kim, K.S.; Kim, S.; Yun, S.J.; Jang, I.G.; Kim, E.H. Developing a robust sensing system for remote relative 6-DOF motion using 1-D laser sensors. In Proceedings of the IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 19–22 March 2012; pp. 1–4.
- Kim, Y.K.; Kim, K.S.; Kim, S. A Portable and Remote 6-DOF Pose Sensor System with a Long Measurement Range Based on 1-D Laser Sensors. IEEE Trans. Ind. Electron. 2015, 62, 5722–5729. [Google Scholar] [CrossRef]
- Wenfu, X.U.; Liang, B.; Cheng, L.I.; Liu, Y. Measurement and Planning Approach of Space Robot for Capturing Non-cooperative Target. Robot 2010, 32, 61–69. [Google Scholar]
- Li, W.Y.; Xu, G.L.; Zhou, L.; Wang, B.; Tian, Y.P.; Li, K.Y. Research on Measurement of Relative Poses between Two Non-Cooperative Spacecrafts. Aero Weapon. 2012, 3, 14–17. [Google Scholar]
- Zhang, S.J.; Cao, X.B.; Zhang, F.; He, L. Monocular vision-based iterative pose estimation algorithm from corresponding feature points. Sci. China Inf. Sci. 2010, 53, 1682–1696. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Liu, X. Motion-estimation-based visual servoing of nonholonomic mobile robots. IEEE Trans. Robot. 2011, 27, 1167–1175. [Google Scholar] [CrossRef]
- Xu, W.; Liang, B.; Li, C.; Liu, Y.; Qiang, W. The approach and simulation study of the relative pose measurement between spacecrafts based on stereo vision. J. Astronaut. 2009, 30, 1421–1428. [Google Scholar]
- Segal, S.; Carmi, A.; Gurfil, P. Stereovision-based estimation of relative dynamics between noncooperative satellites: Theory and experiments. IEEE Trans. Control Syst. Technol. 2014, 22, 568–584. [Google Scholar] [CrossRef]
- Frueh, C.; Jain, S.; Zakhor, A. Data processing algorithms for generating textured 3D building facade meshes from laser scans and camera images. Int. J. Comput. Vis. 2005, 61, 159–184. [Google Scholar] [CrossRef]
- Bok, Y.; Jeong, Y.; Choi, D.G.; Kweon, I.S. Capturing village-level heritages with a hand-held camera-laser fusion sensor. Int. J. Comput. Vis. 2011, 94, 36–53. [Google Scholar] [CrossRef]
- Myung, H.; Lee, S.; Lee, B. Paired structured light for structural health monitoring robot system. Struct. Health Monit. 2010. [Google Scholar] [CrossRef]
- Jeon, H.; Bang, Y.; Myung, H. A paired visual servoing system for 6-DOF displacement measurement of structures. Smart Mater. Struct. 2011, 20, 045019. [Google Scholar] [CrossRef]
- Santolaria, J.; Guillomia, D.; Cajal, C.; Albajez, J.A.; Aguilar, J.J. Modelling and Calibration Technique of Laser Triangulation Sensors for Integration in Robot Arms and Articulated Arm Coordinate Measuring Machines. Sensors 2009, 9, 7374–7396. [Google Scholar] [CrossRef] [PubMed]
- Fruh, C.; Zakhor, A. An Automated Method for Large-Scale, Ground-Based City Model Acquisition. Int. J. Comput. Vis. 2004, 60, 5–24. [Google Scholar] [CrossRef]
- Chou, Y.S.; Liu, J.S. A Robotic Indoor 3D Mapping System Using a 2D Laser Range Finder Mounted on a Rotating Four-Bar Linkage of a Mobile Platform. Int. J. Adv. Robot. Syst. 2013, 10, 257–271. [Google Scholar] [CrossRef]
- Droeschel, D.; Stuckler, J.; Behnke, S. Local multi-resolution representation for 6D motion estimation and mapping with a continuously rotating 3D laser scanner. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5221–5226.
- Sheng, J.; Tano, S.; Jia, S. Mobile robot localization and map building based on laser ranging and PTAM. In Proceedings of the International Conference on Mechatronics and Automation (ICMA), Beijing, China, 7–10 August 2011; pp. 1015–1020.
- Jung, E.J.; Lee, J.H.; Yi, B.J.; Park, J. Development of a Laser-Range-Finder-Based Human Tracking and Control Algorithm for a Marathoner Service Robot. IEEE/ASME Trans. Mech. 2014, 19, 1963–1976. [Google Scholar] [CrossRef]
- Aguirre, E.; Garcia-Silvente, M.; Plata, J. Leg Detection and Tracking for a Mobile Robot and Based on a Laser Device, Supervised Learning and Particle Filtering; Springer: Basel, Switzerland, 2014; pp. 433–440. [Google Scholar]
- Chen, T.C.; Li, J.Y.; Chang, M.F.; Fu, L.C. Multi-robot cooperation based human tracking system using Laser Range Finder. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 532–537.
- Nakamura, T.; Takijima, M. Interactive syntactic modeling with a single-point laser range finder and camera (ISMAR 2013 Presentation). In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Adelaide, Australia, 1–4 October 2013; pp. 107–116.
- Atman, J.; Popp, M.; Ruppelt, J.; Trommer, G.F. Navigation Aiding by a Hybrid Laser-Camera Motion Estimator for Micro Aerial Vehicles. Sensors 2016, 16, 1516. [Google Scholar] [CrossRef] [PubMed]
- Oh, T.; Lee, D.; Kim, H.; Myung, H. Graph Structure-Based Simultaneous Localization and Mapping Using a Hybrid Method of 2D Laser Scan and Monocular Camera Image in Environments with Laser Scan Ambiguity. Sensors 2015, 15, 15830–15852. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.; Reitmayr, G. Calibrating setups with a single-point laser range finder and a camera. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2013), Tokyo, Japan, 3–7 November 2013; pp. 1801–1806.
- Zhang, Q.; Pless, R. Extrinsic calibration of a camera and laser range finder (improves camera calibration). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2301–2306.
- Unnikrishnan, R.; Hebert, M. Fast Extrinsic Calibration of a Laser Rangefinder to a Camera; Carnegie Mellon University: Pittsburgh, PA, USA, 2005. [Google Scholar]
- Vasconcelos, F.; Barreto, J.P.; Nunes, U. A Minimal Solution for the Extrinsic Calibration of a Camera and a Laser-Rangefinder. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2097–2107. [Google Scholar] [CrossRef] [PubMed]
- Scaramuzza, D.; Harati, A.; Siegwart, R. Extrinsic self calibration of a camera and a 3D laser range finder from natural scenes. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 4164–4169.
- Zhao, K.; Iurgel, U.; Meuter, M.; Pauli, J. An automatic online camera calibration system for vehicular applications. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1490–1492.
- Zhang, Y.; Zhou, L.; Liu, H.K.; Shang, Y. A Flexible Online Camera Calibration Using Line Segments. J. Sens. 2016, 2016, 1–16. [Google Scholar] [CrossRef]
- Han, J.; Pauwels, E.J.; De Zeeuw, P. Visible and infrared image registration in man-made environments employing hybrid visual features. Pattern Recognit. Lett. 2013, 34, 42–51. [Google Scholar] [CrossRef]
- Han, J.; Farin, D. Broadcast Court-Net Sports Video Analysis Using Fast 3D Camera Modeling. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1628–1638. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Zhang, Z. Flexible Camera Calibration by Viewing a Plane from Unknown Orientations. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; p. 666.
- Pham, D.D.; Suh, Y.S. Remote length measurement system using a single point laser distance sensor and an inertial measurement unit. Comput. Stand. Interfaces 2017, 50, 153–159. [Google Scholar] [CrossRef]
- FARO. FARO Vantage Laser Tracker Techsheet. Available online: http://www.faro.com (accessed on 28 October 2016).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| World coordinate frame | |
| Camera coordinate frame | |
| Image coordinate frame | |
| Camera projection matrix | |
| Installation position of laser i w.r.t. | |
| Direction vector of laser beam i w.r.t. | |
| Direction vector of the optical line | |
| r | Radius of the sphere |
| Position of laser spot i w.r.t. | |
| π | Projection function of the vision camera |
| Reprojection coordinate of laser spot i | |
| Reprojection coordinate of the center of the projected circle | |
| Image coordinate of the detected laser spot i | |
| Image coordinate of the detected center of the projected circle |
| Method | Accuracy | Remark |
|---|---|---|
| Proposed System | <4 mm | based on simple lasers and camera |
| Three-Beam Detector [3] | <3 mm | installation of a camera on the target |
| Portable Three-Beam Detector [5] | <4 mm | based on 1D LRFs and camera |
| Handheld Camera-Laser System [13] | ∼20 mm | based on 2D laser scanners and Camera |
| Laser 2D Scanner [12] | ∼60 mm | sub-cm accuracy |
| Single-point 1D Laser Sensor [38] | ∼12 mm | based on single-point LRFs |
| Laser Tracker [39] | ∼15 m | high cost |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Dong, H.; Chen, Y.; Zheng, N. An Accurate Non-Cooperative Method for Measuring Textureless Spherical Target Based on Calibrated Lasers. Sensors 2016, 16, 2097. https://doi.org/10.3390/s16122097
Wang F, Dong H, Chen Y, Zheng N. An Accurate Non-Cooperative Method for Measuring Textureless Spherical Target Based on Calibrated Lasers. Sensors. 2016; 16(12):2097. https://doi.org/10.3390/s16122097
Chicago/Turabian StyleWang, Fei, Hang Dong, Yanan Chen, and Nanning Zheng. 2016. "An Accurate Non-Cooperative Method for Measuring Textureless Spherical Target Based on Calibrated Lasers" Sensors 16, no. 12: 2097. https://doi.org/10.3390/s16122097