

Enhancing Water Depth Estimation from Satellite Images Using Online Machine Learning: A Case Study Using Baidu Easy-DL with Acoustic Bathymetry and Sentinel-2 Data

Abstract
:
1. Introduction
2. Experimental Data Collection
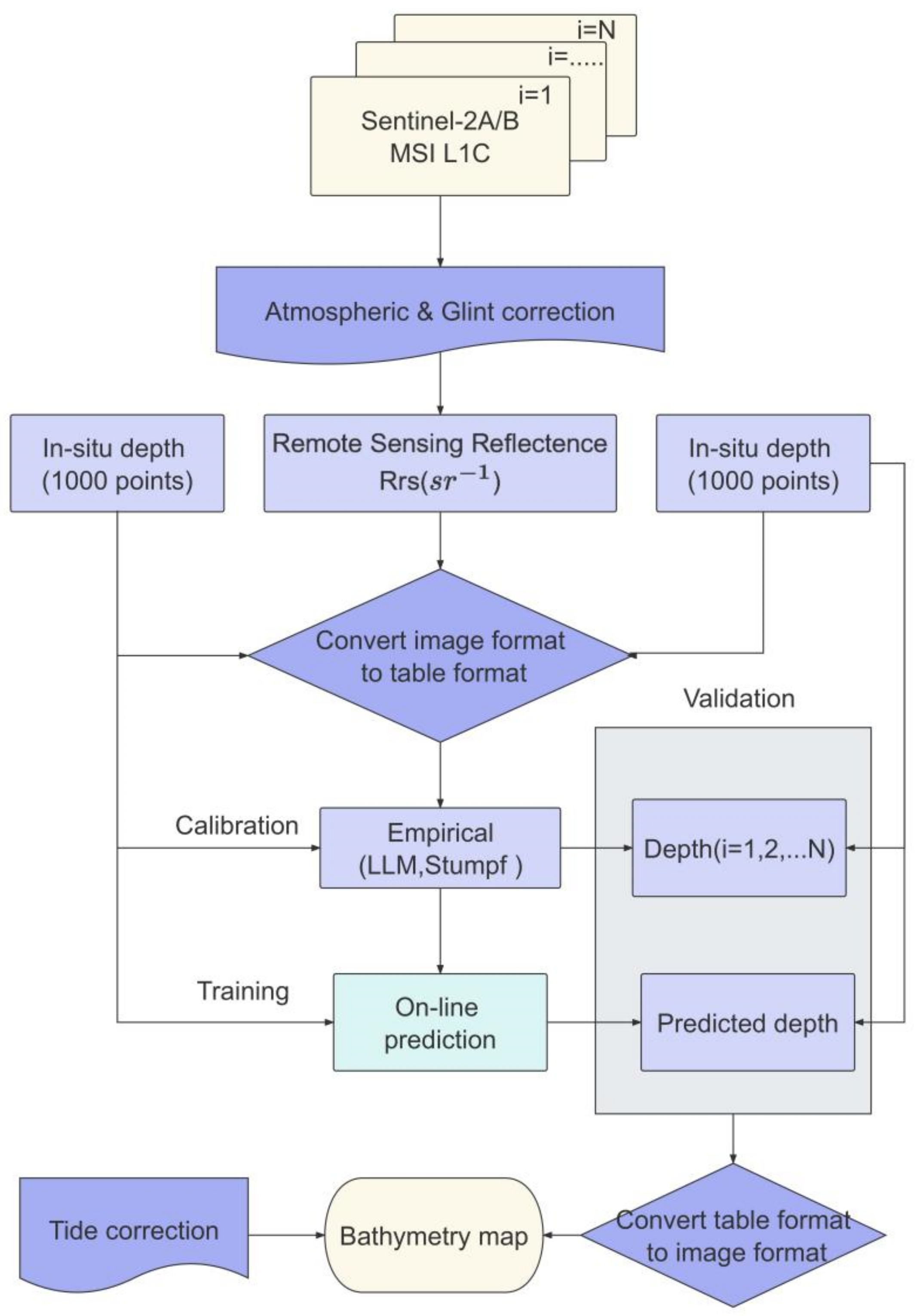
2.1. The Study Areas and Sentinel-2 Imagery
2.2. In-Situ Data
3. Proposed Machine Learning Algorithms for Bathymetry Mapping
3.1. Stumpf Model
3.2. Log-Linear Model
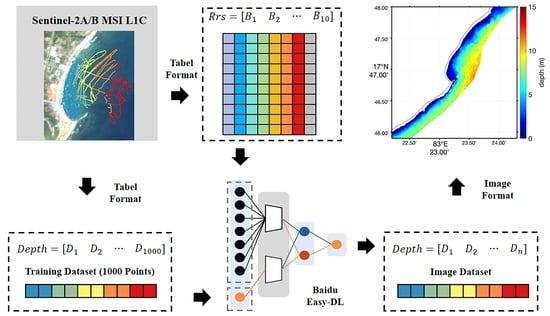
3.3. Baidu Easy DL Model
- (a)
- Data preparation: Upload or import the data table that is to be used for prediction. Easy-DL supports multiple data formats, such as CSV, Excel, JSON, etc.
- (b)
- Model selection: select a suitable pre-trained model for prediction based on the characteristics of the table data and the prediction requirements.
- (c)
- Data preprocessing: preprocess the table data, including data cleaning, feature selection, data enhancement, and table format conversion, to improve the training effect of the model.
- (d)
- Model training: Based on the uploaded table data and the selected model, Easy-DL automatically performs model training. During the training process, you can monitor the training progress and view performance indicators during training.
- (e)
- Model evaluation: after the model training is complete, Easy-DL provides a series of evaluation indicators, such as accuracy, precision, and recall, to evaluate the performance of the model.
- (f)
- Model deployment: After model evaluation is complete, the trained model can be deployed to the production environment. Easy-DL provides multiple deployment options, such as API, SDK, and a custom code, to meet different application needs.
- (g)
- Prediction: The deployed model can be applied to actual scenarios for prediction. Through the API or SDK provided by Easy-DL, the prediction of the table can be easily performed.
3.4. Accuracy Evaluation Methods
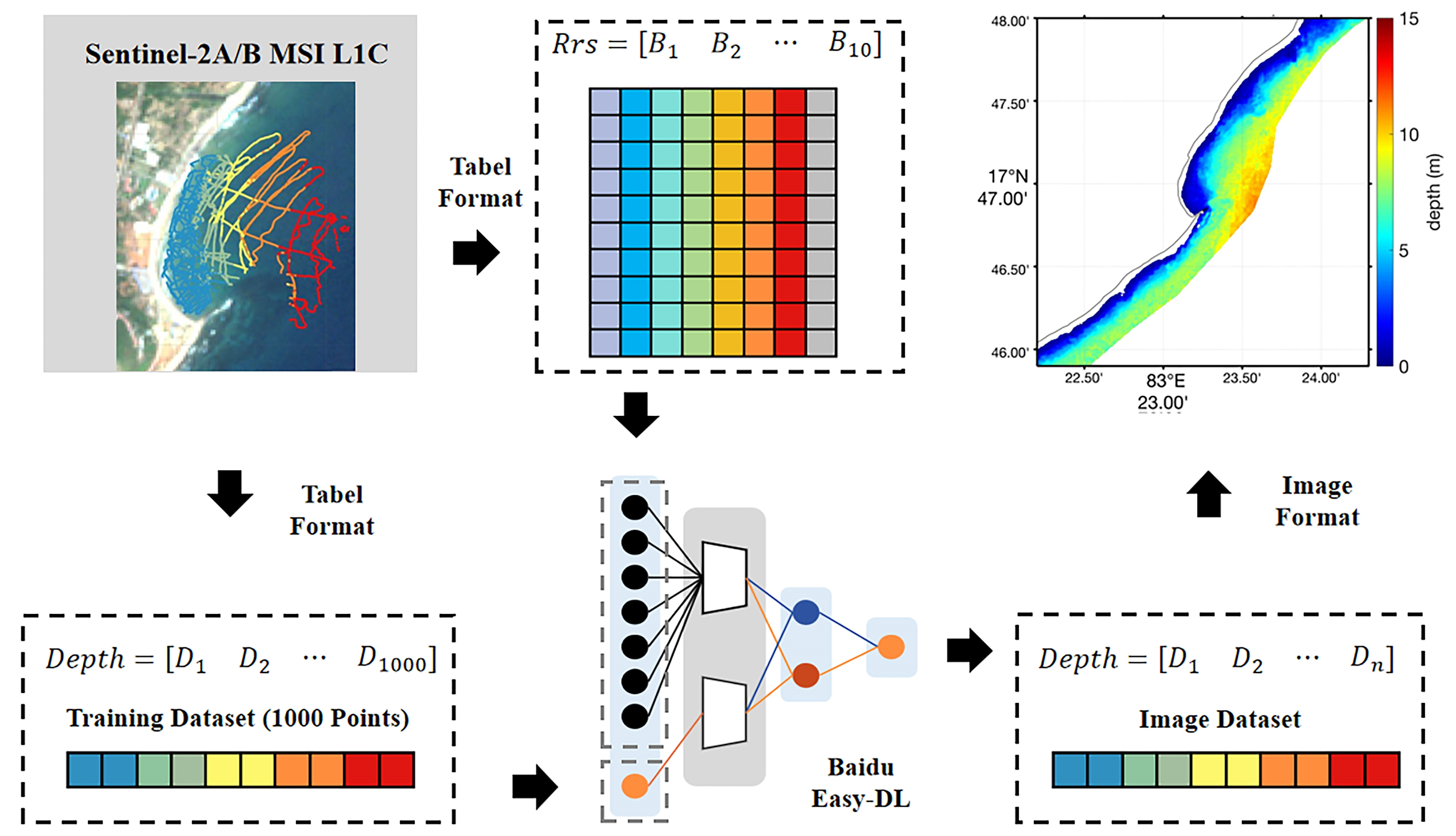
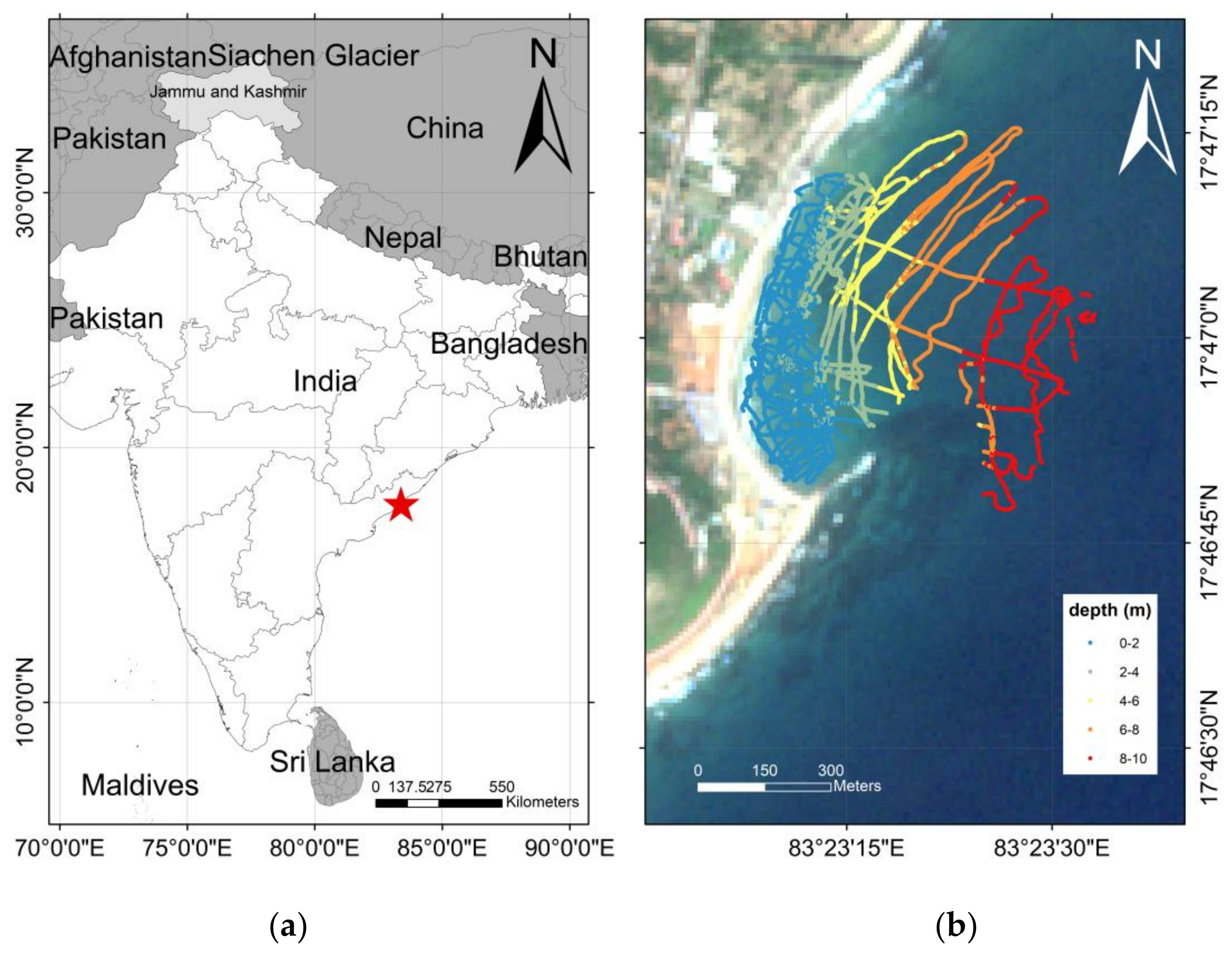
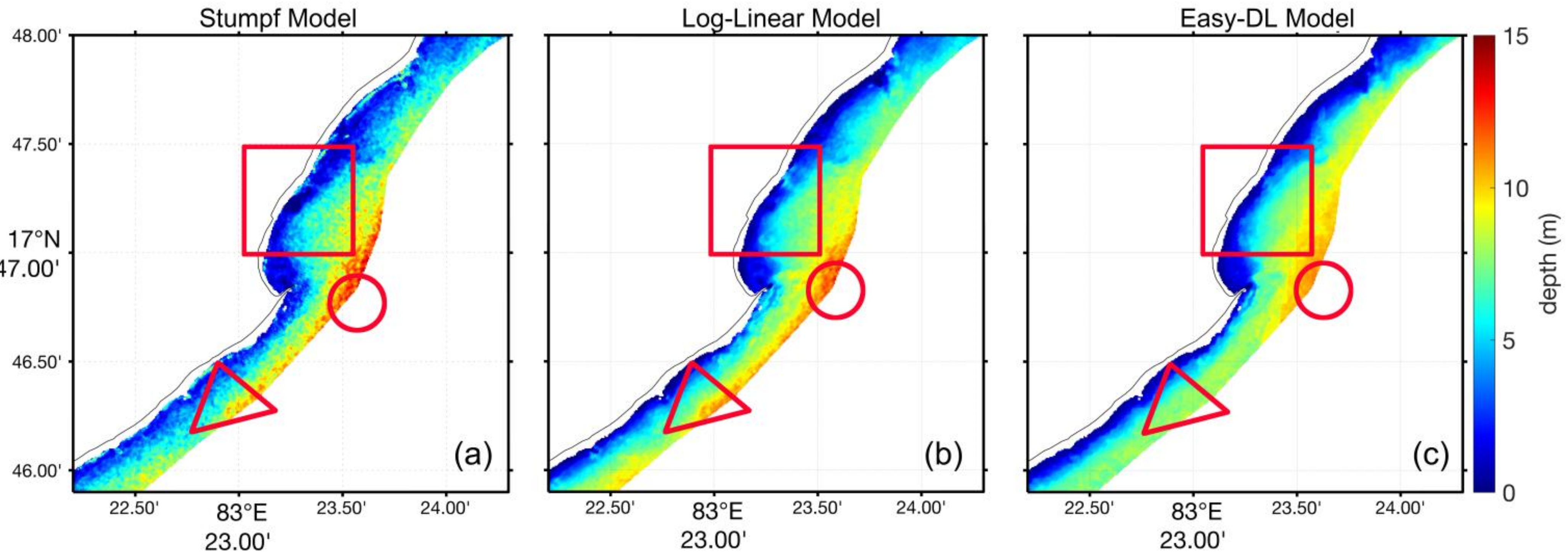
3.5. Bathymetry Mapping
4. Experimental Setup and Results
5. Discussion
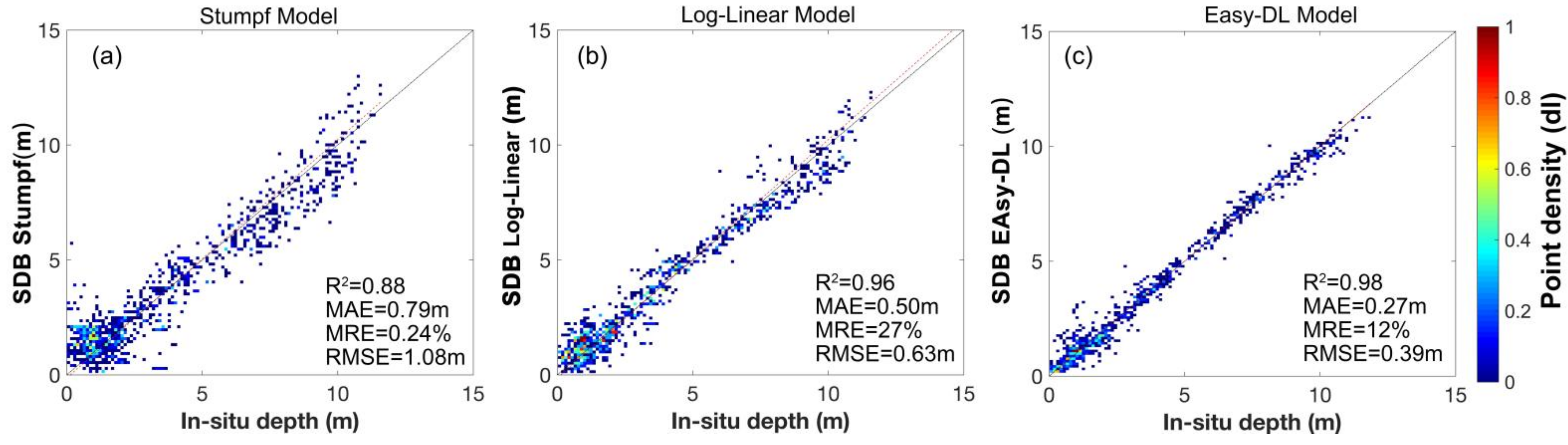
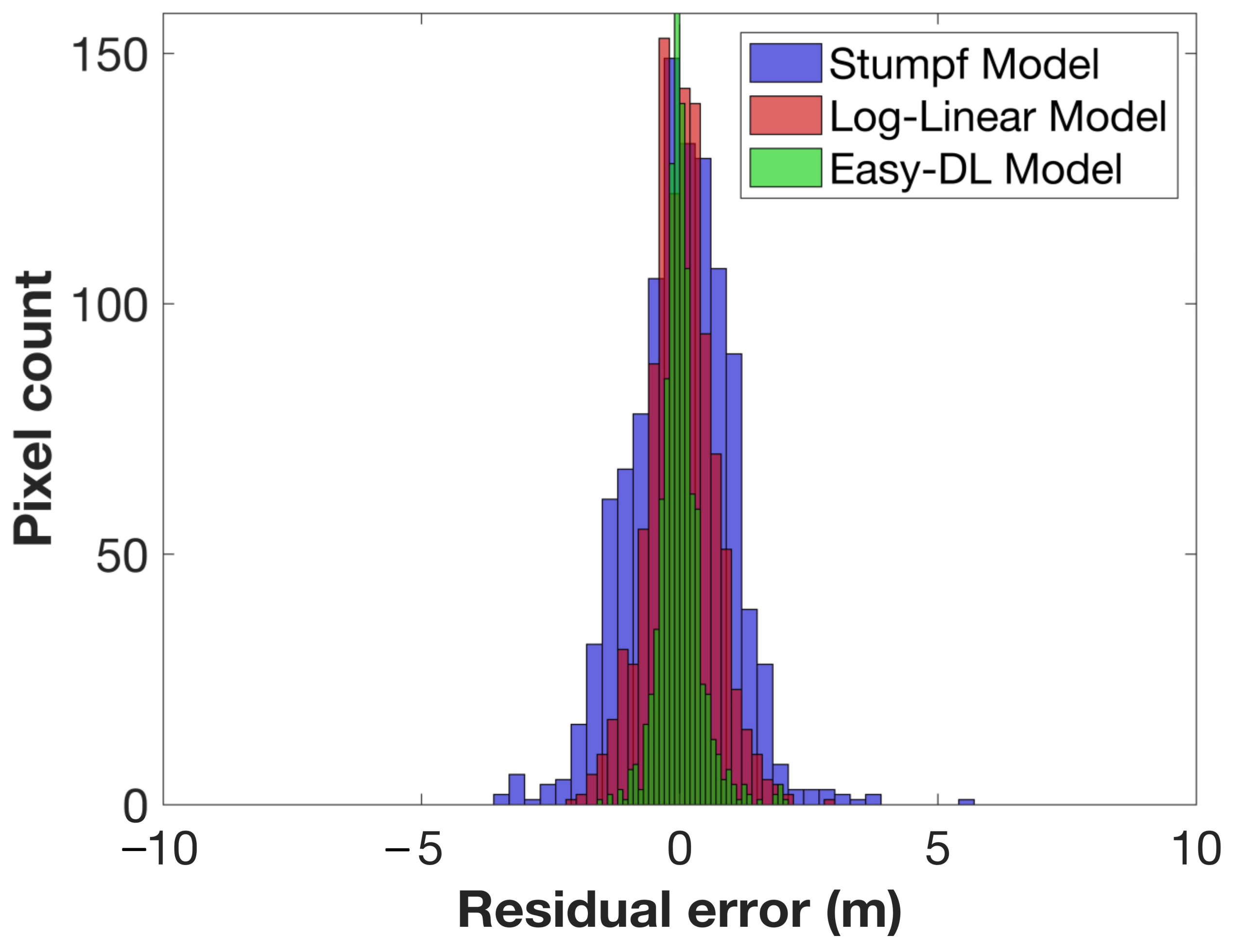
5.1. The Performance of Water Depth Inversion Model
5.2. The Uncertainty and Implications of Baidu Easy-DL Model
- (a)
- Model Selection: The choice of the model may affect the accuracy of the inversion results. Although machine learning models generally have higher robustness than traditional semi-empirical, bio-optical, and semi-analytical models², different machine learning models may produce different results. For example, a study found that the Genetic Algorithm Optimized Extreme Learning Machine (GA-ELM) had a more compact network structure and better generalization ability than the Extreme Learning Machine (ELM).
- (b)
- Input Variables: The choice of input variables may also affect the results. For example, using remote sensing reflectance values at different bands as input variables may lead to different inversion results.
- (c)
- Data Quality: The quality of remote sensing data also affects the inversion results. For example, if remote sensing data contain noise or are affected by factors such as atmosphere and water turbidity, it may lead to inaccurate inversion results.
- (a)
- Depth Inversion: This work is of paramount importance for depth inversion, offering valuable support for marine engineering, shipping, and maritime military security.
- (b)
- Environmental Monitoring: This methodology can also be utilized for environmental monitoring, such as monitoring the water quality of inland bodies of water.
- (c)
- Scientific Advancement: This work can propel scientific progress in related fields, such as enhancing the accuracy and robustness of remote sensing inversion models.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Y.; Zhao, J.; Deng, R.; Liang, Y.; Gao, Y.; Chen, Q.; Xiong, L.; Liu, Y.; Tang, Y.; Tang, D. A downscaled bathymetric mapping approach combining multitemporal Landsat-8 and high spatial resolution imagery: Demonstrations from clear to turbid waters. ISPRS J. Photogramm. Remote Sens. 2021, 180, 65–81. [Google Scholar] [CrossRef]
- Cao, B.; Deng, R.; Zhu, S. Universal algorithm for water depth refraction correction in through-water stereo remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102108. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Legleiter, C.J.; Bovolo, F. River Bathymetry Retrieval from Landsat-9 Images Based on Neural Networks and Comparison to SuperDove and Sentinel-2. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 5250–5260. [Google Scholar] [CrossRef]
- Liu, H.; Li, J.; Meng, X.; Zhou, B.; Fang, G.; Spencer, B.F. Discrimination Between Dry and Water Ices by Full Polarimetric Radar: Implications for China’s First Martian Exploration. IEEE Trans. Geosci. Remote Sens. 2022, 61, 5100111. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Lyzenga, D.R.; Malinas, N.R.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G.; Phinn, S.R.; Roelfsema, C. A physics based retrieval and quality assessment of bathymetry from suboptimal hyperspectral data. Remote Sens. Environ. 2009, 113, 755–770. [Google Scholar] [CrossRef]
- Liu, Z.; Xu, J.; Liu, M.; Yin, Z.; Liu, X.; Yin, L.; Zheng, W. Remote sensing and geostatistics in urban water-resource monitoring: A review. Mar. Freshw. Res. 2023, 74, 747–765. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, R.; Qin, Y.; Cao, B.; Liang, Y.; Liu, Y.; Tian, J.; Wang, S. Rapid estimation of bathymetry from multispectral imagery without in situ bathymetry data. Appl. Opt. 2019, 58, 7538–7551. [Google Scholar] [CrossRef]
- Wu, Z.; Mao, Z.; Shen, W. Integrating Multiple Datasets and Machine Learning Algorithms for Satellite-Based Bathymetry in Seaports. Remote Sens. 2021, 13, 4328. [Google Scholar] [CrossRef]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating Satellite-Derived Bathymetry (SDB) with Google Earth Engine and Sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef]
- Zhou, W.; Tang, Y.; Jing, W.; Li, Y.; Yang, J.; Deng, Y.; Zhang, Y. A Comparison of Machine Learning and Empirical Approaches for Deriving Bathymetry from Multispectral Imagery. Remote Sens. 2023, 15, 393. [Google Scholar] [CrossRef]
- Li, J.; Knapp, D.E.; Lyons, M.; Roelfsema, C.; Phinn, S.; Schill, S.R.; Asner, G.P. Automated Global Shallow Water Bathymetry Mapping Using Google Earth Engine. Remote Sens. 2021, 13, 1469. [Google Scholar] [CrossRef]
- Wen, C.; Hu, Y.; Li, X.; Yuan, Z.; Zhu, X.X. Vision-Language Models in Remote Sensing: Current Progress and Future Trends. arXiv 2023, arXiv:2305.05726. [Google Scholar]
- Hu, Y.; Yuan, J.; Wen, C.; Lu, X.; Li, X. RSGPT: A Remote Sensing Vision Language Model and Benchmark. arXiv 2023, arXiv:2307.15266. [Google Scholar]
- Zhang, J.; Zhou, Z.; Mai, G.; Mu, L.; Hu, M.; Li, S. Text2Seg: Remote Sensing Image Semantic Segmentation via Text-Guided Visual Foundation Models. arXiv 2023, arXiv:2304.10597. [Google Scholar]
- Tian, H.; Huang, N.; Niu, Z.; Qin, Y.; Pei, J.; Wang, J. Mapping winter crops in China with multi-source satellite imagery and phenology-based algorithm. Remote Sens. 2019, 11, 820. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, B.; Topatana, W.; Cao, J.; Zhu, H.; Juengpanich, S.; Mao, Q.; Yu, H.; Cai, X. Classification and mutation prediction based on histopathology H&E images in liver cancer using deep learning. NPJ Precis. Oncol. 2020, 4, 14. [Google Scholar]
- Arun Kumar, V.V. Numerical Modelling of Coastal and Nearshore Processes in the Vicinity of Shoreline Harbours with Special Reference to Visakhapatnam Coast India. Ph.D. Thesis, Andhra University, Visakhapatnam, India. 2012. Available online: http://hdl.handle.net/10603/407131 (accessed on 12 October 2023).
- Ruddick, K.; Vanhellemont, Q.; Dogliotti, A.; Nechad, B.; Pringle, N.; Van der Zande, D. New opportunities and challenges for high resolution remote sensing of water colour. In Proceedings of the Ocean Optics XXIII, Victoria, BC, Canada, 23–28 October 2016; Volume 7. [Google Scholar]
- Vanhellemont, Q.; Ruddick, K. Acolite for Sentinel-2: Aquatic applications of MSI imagery. In Proceedings of the 2016 ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; pp. 9–13. [Google Scholar]
- Dugan, J.; Morris, W.; Vierra, K.; Piotrowski, C.; Farruggia, G.; Campion, D. Jetski-based nearshore bathymetric and current survey system. J. Coast. Res. 2001, 17, 900–908. [Google Scholar]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Method | RMSE | ||||
|---|---|---|---|---|---|
| 0–3 m (580 Points) | 3–6 m (214 Points) | 6–9 m (200 Points) | >9 m (95 Points) | Overall (1089 Points) | |
| Stumpf | 1.12 | 1.01 | 0.94 | 1.19 | 1.08 |
| Log-Linear | 0.59 | 0.58 | 0.66 | 0.89 | 0.63 |
| Easy-DL | 0.43 | 0.29 | 0.23 | 0.39 | 0.39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Wu, S.; Yang, H.; Mao, Z.; Shen, W. Enhancing Water Depth Estimation from Satellite Images Using Online Machine Learning: A Case Study Using Baidu Easy-DL with Acoustic Bathymetry and Sentinel-2 Data. Remote Sens. 2023, 15, 4955. https://doi.org/10.3390/rs15204955
Wu Z, Wu S, Yang H, Mao Z, Shen W. Enhancing Water Depth Estimation from Satellite Images Using Online Machine Learning: A Case Study Using Baidu Easy-DL with Acoustic Bathymetry and Sentinel-2 Data. Remote Sensing. 2023; 15(20):4955. https://doi.org/10.3390/rs15204955
Chicago/Turabian StyleWu, Zhongqiang, Shulei Wu, Haixia Yang, Zhihua Mao, and Wei Shen. 2023. "Enhancing Water Depth Estimation from Satellite Images Using Online Machine Learning: A Case Study Using Baidu Easy-DL with Acoustic Bathymetry and Sentinel-2 Data" Remote Sensing 15, no. 20: 4955. https://doi.org/10.3390/rs15204955