
An Improved UAV Bi-SAR Imaging Algorithm with Two-Dimensional Spatial Variant Range Cell Migration Correction and Azimuth Non-Linear Phase Equalization
Abstract
:1. Introduction
2. Models
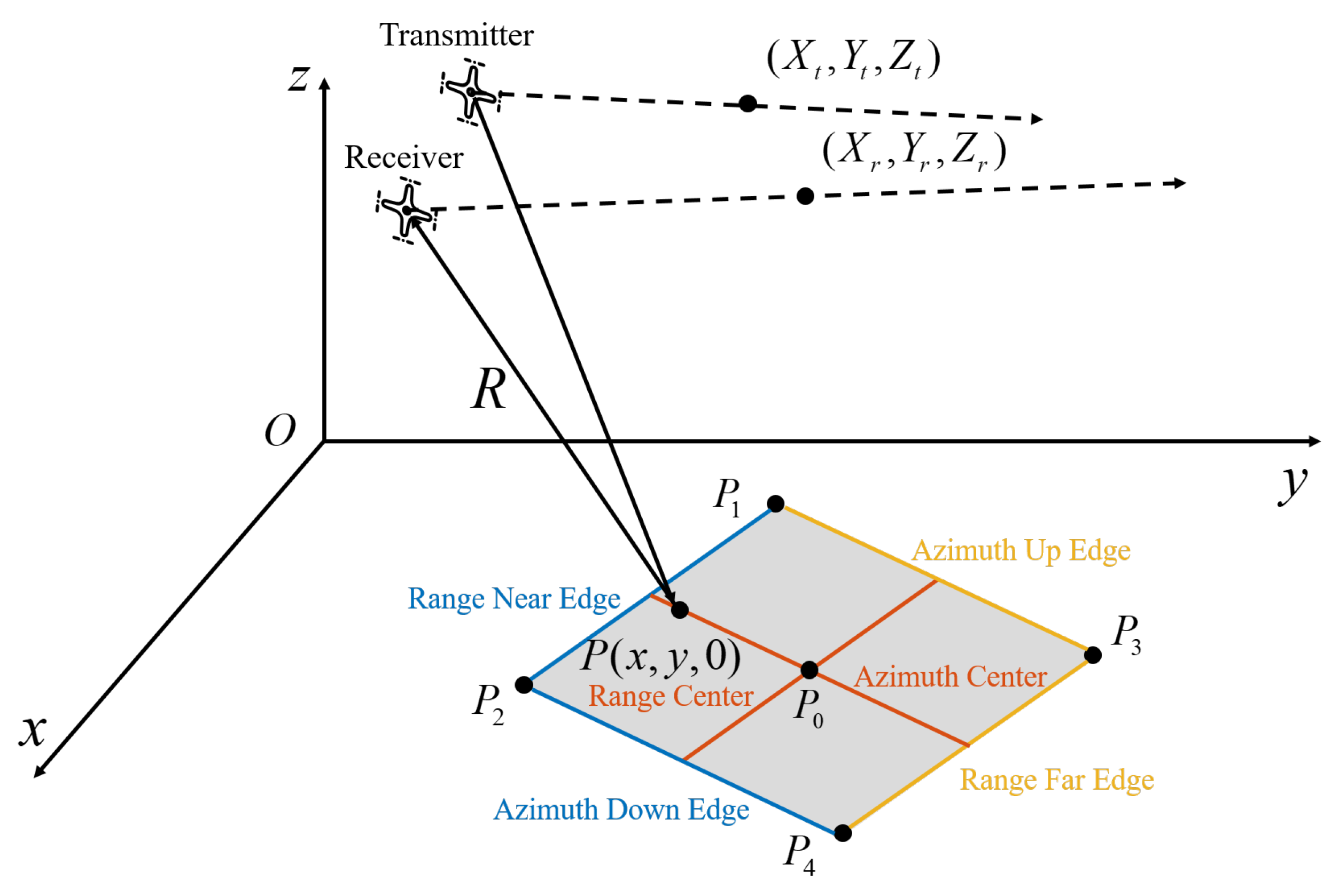
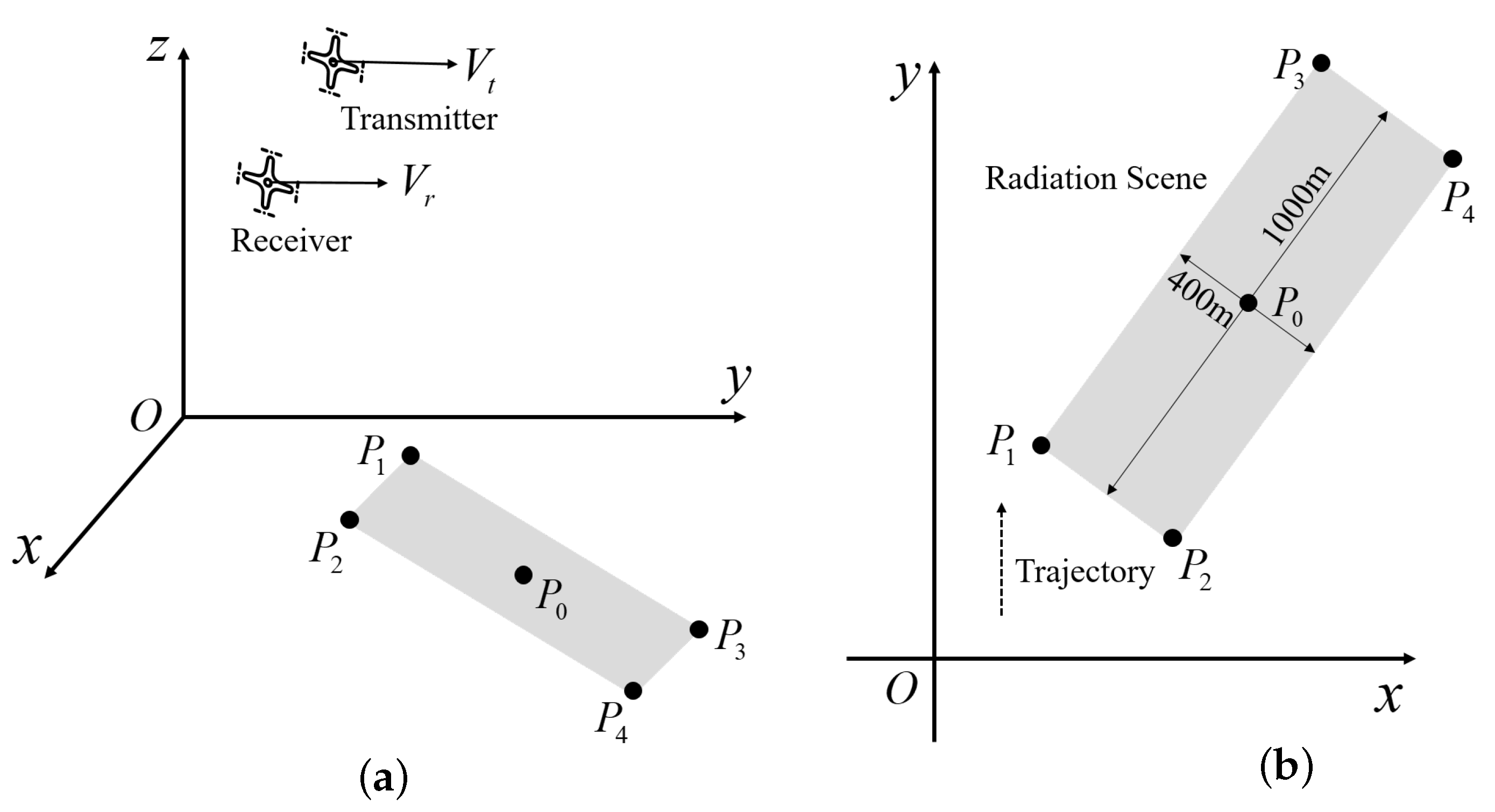
2.1. Slant Range Model
2.2. UAV Bi-SAR Echo Model
2.3. Spatial Variant AFP Model
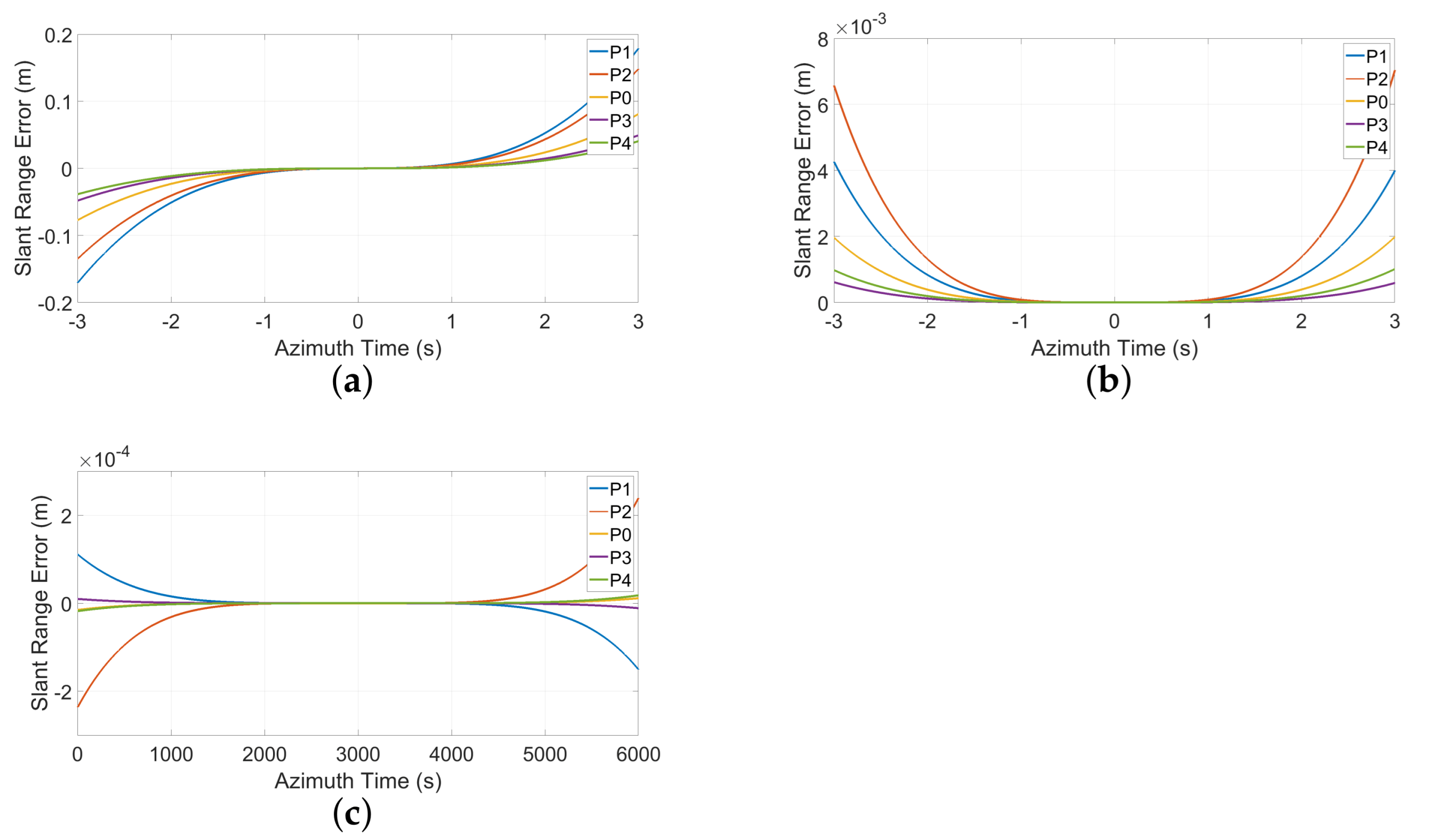
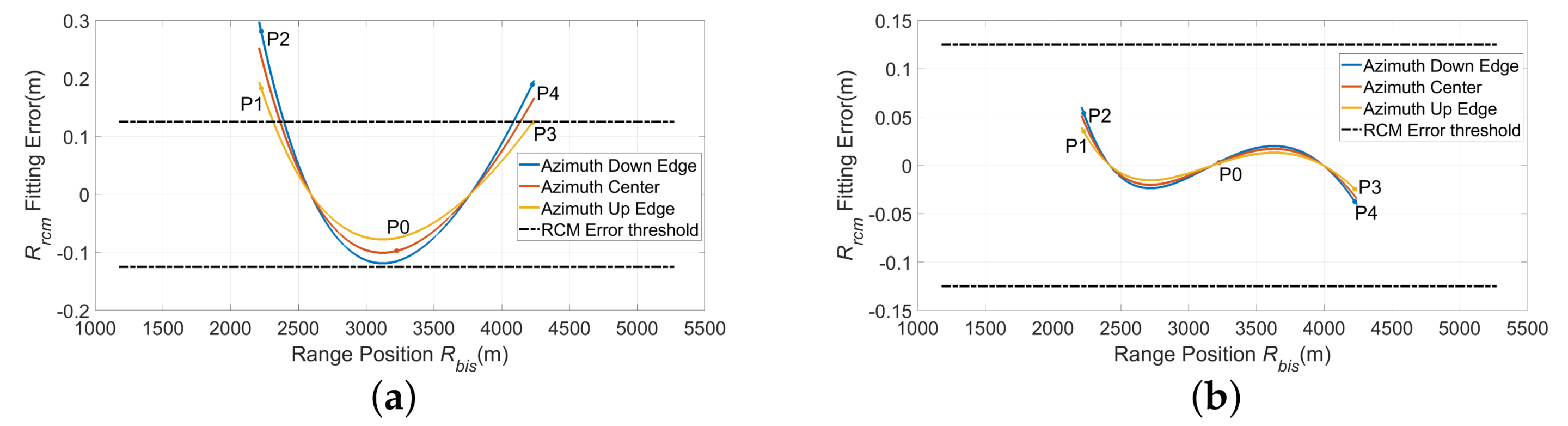
2.3.1. 2D Spatial Variant RCM
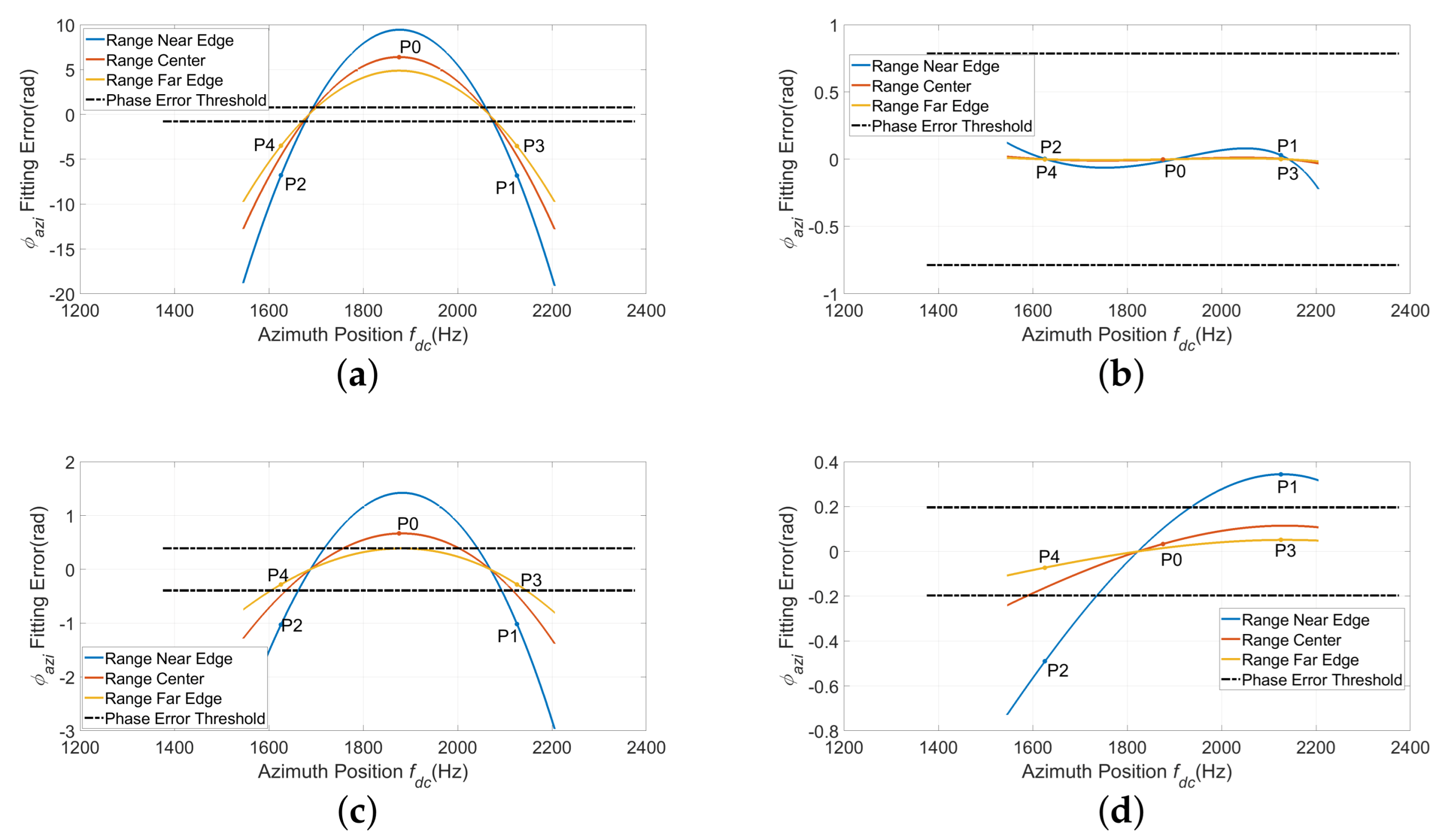
2.3.2. 2D Spatial Variant ANP
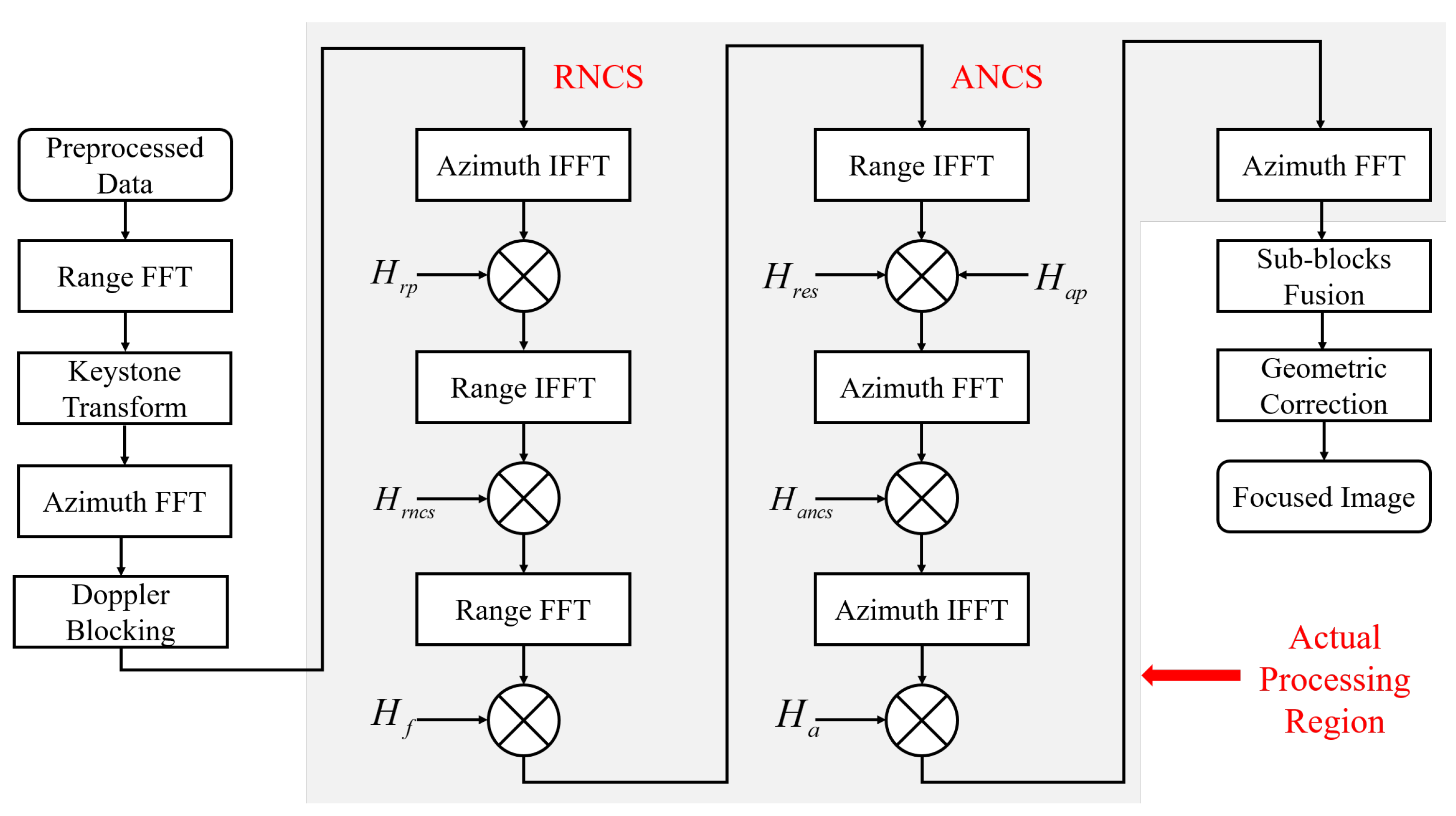
3. Imaging Algorithm
3.1. RWC Based on Keystone Transform
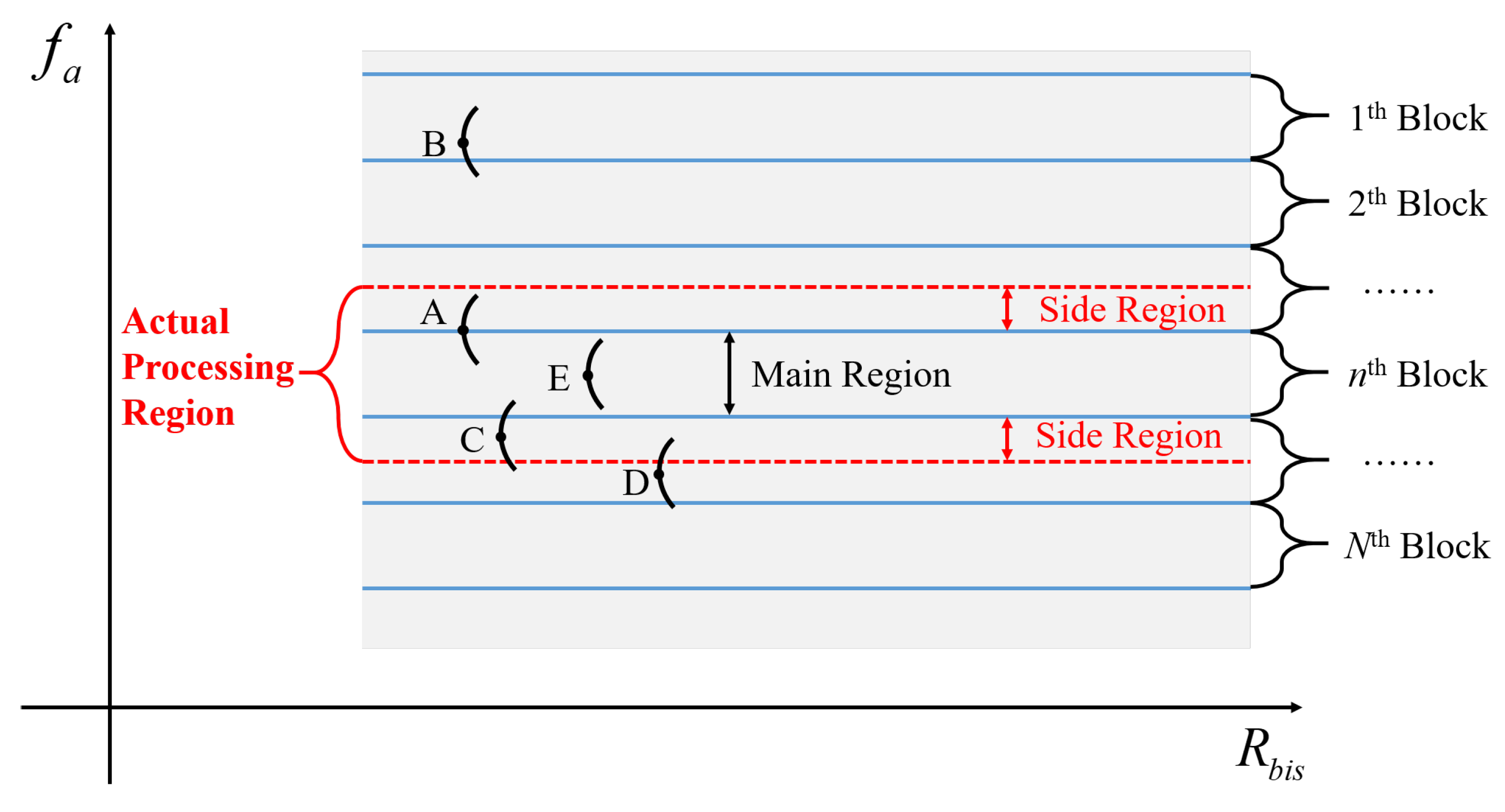
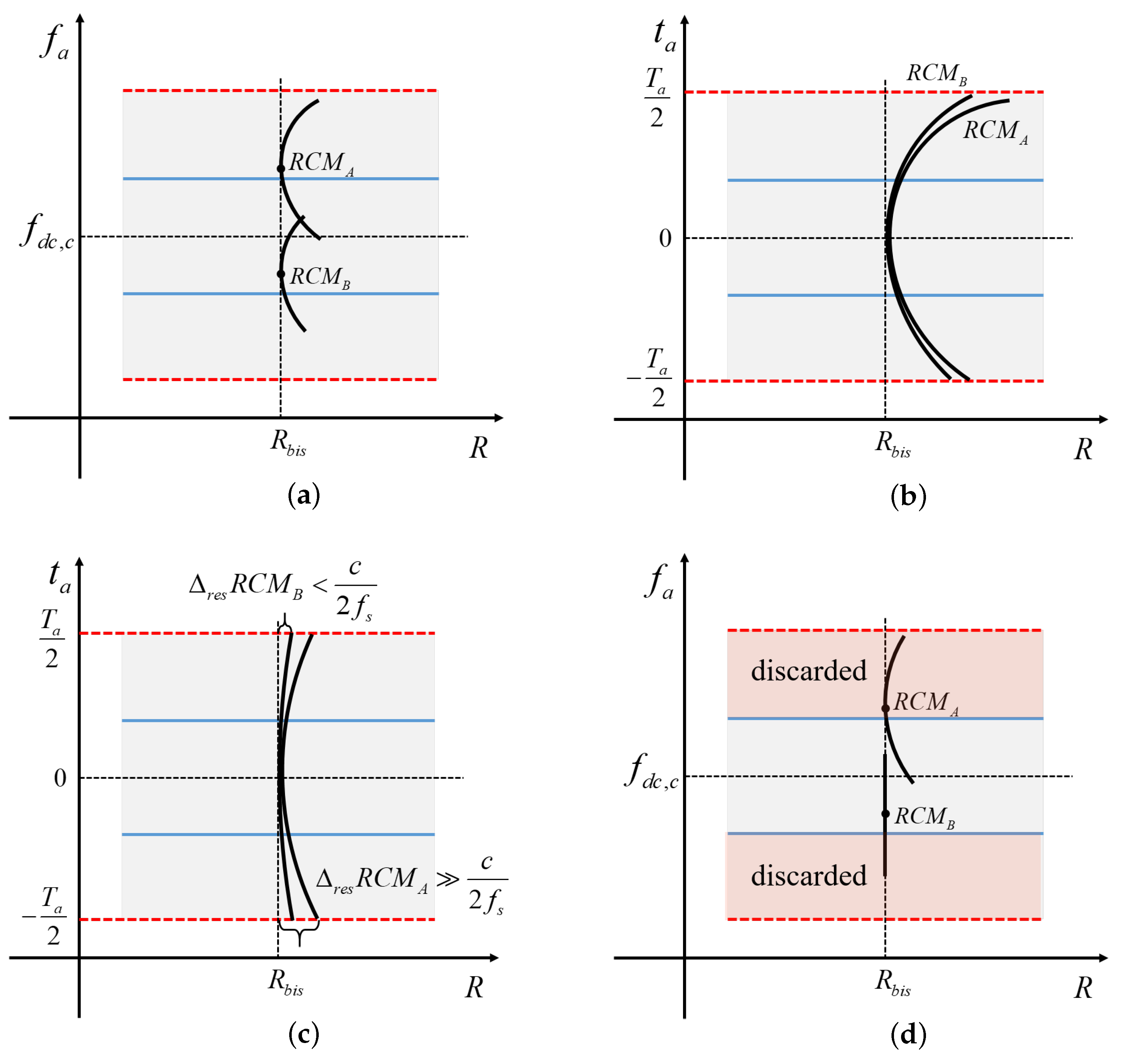
3.2. Azimuth Spatial Variant Residual RCMC Based on Doppler Blocking
3.3. Range Spatial Variant Residual RCMC Based on RNCS
3.4. Azimuth Spatial Variant ANPE Based on ANCS Combined with Doppler Blocking
4. Simulation and Verification
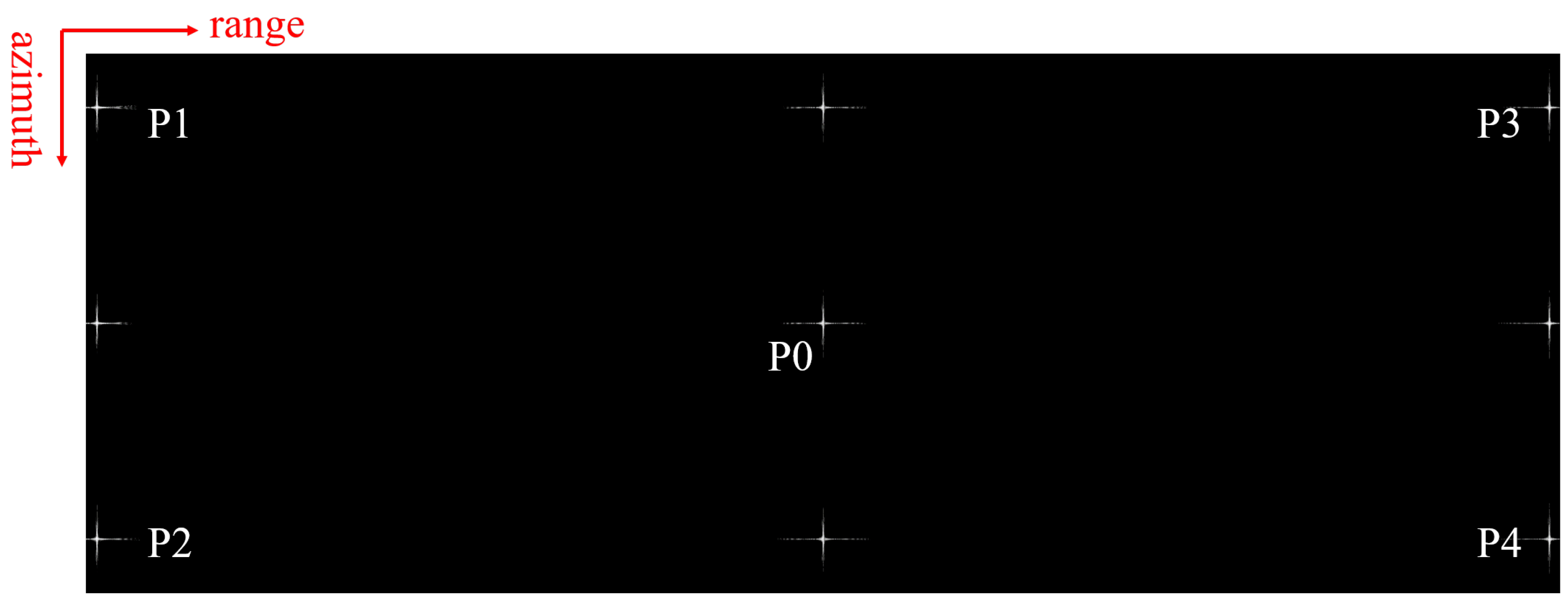
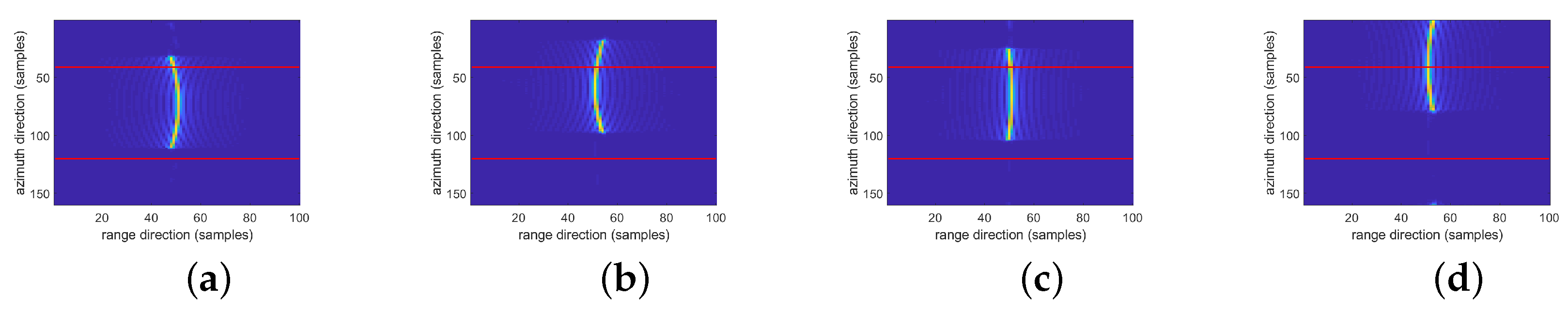
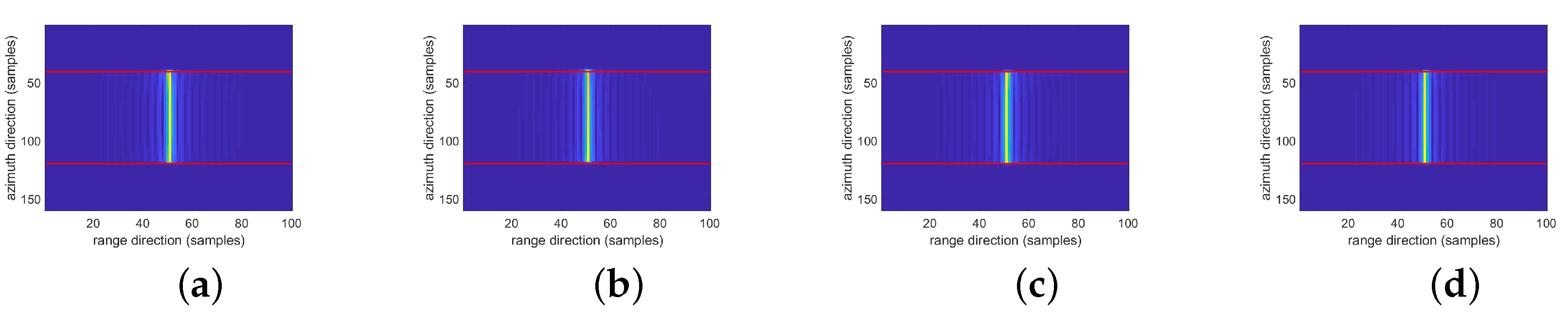
4.1. Simulation
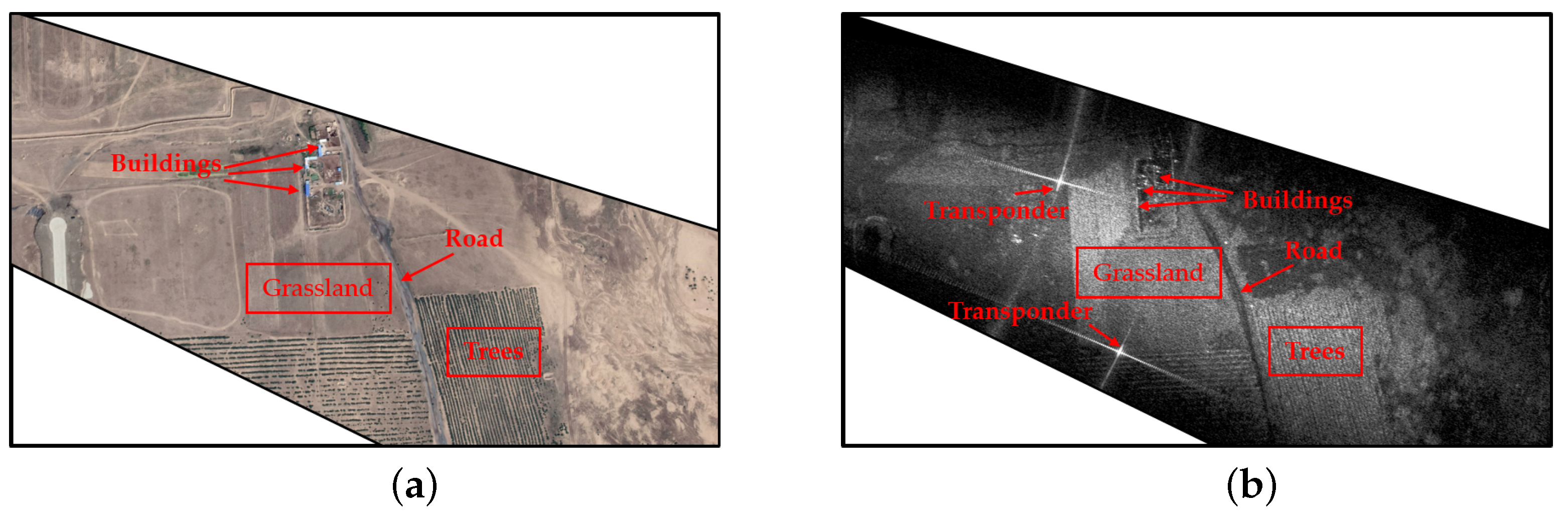
4.2. Raw Data Processing
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Auterman, J.L. Phase stability requirements for bistatic SAR. In Proceedings of the IEEE National Radar Conference, Atlanta, GE, USA, 13–14 March 1984; pp. 45–52. [Google Scholar]
- Wang, Y.; Ding, Z.; Li, L.; Liu, M.; Ma, X.; Sun, Y.; Zeng, T.; Long, T. First Demonstration of Single-Pass Distributed SAR Tomographic Imaging With a P-Band UAV SAR Prototype. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5238618. [Google Scholar] [CrossRef]
- Yates, G.; Horne, A.; Blake, A.; Middleton, R. Bistatic SAR image formation. IEE Proc.-Radar Sonar Navig. 2006, 153, 208–213. [Google Scholar] [CrossRef] [Green Version]
- Loehner, A. Improved azimuthal resolution of forward looking SAR by sophisticated antenna illumination function design. IEE Proc.-Radar Sonar Navig. 1998, 145, 128–134. [Google Scholar] [CrossRef]
- Wu, J.; Yang, J.; Yang, H.; Huang, Y. Optimal geometry configuration of bistatic forward-looking SAR. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, China, 19–24 April 2009; IEEE: Manhattan, NY, USA, 2009; pp. 1117–1120. [Google Scholar]
- Krieger, G.; Moreira, A. Spaceborne bi-and multistatic SAR: Potential and challenges. IEE Proc.-Radar Sonar Navig. 2006, 153, 184–198. [Google Scholar] [CrossRef] [Green Version]
- Cumming, I.; Bennett, J. Digital processing of Seasat SAR data. In Proceedings of the ICASSP’79—IEEE International Conference on Acoustics, Speech, and Signal Processing, Washington, DC, USA, 2–4 April 1979; Volume 4, pp. 710–718. [Google Scholar] [CrossRef]
- Xu, G.; Zhou, S.; Yang, L.; Deng, S.; Wang, Y.; Xing, M. Efficient Fast Time-Domain Processing Framework for Airborne Bistatic SAR Continuous Imaging Integrated With Data-Driven Motion Compensation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5208915. [Google Scholar] [CrossRef]
- Li, Y.; Xu, G.; Zhou, S.; Xing, M.; Song, X. A Novel CFFBP Algorithm With Noninterpolation Image Merging for Bistatic Forward-Looking SAR Focusing. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5225916. [Google Scholar] [CrossRef]
- Xie, H.; Shi, S.; An, D.; Wang, G.; Wang, G.; Xiao, H.; Huang, X.; Zhou, Z.; Xie, C.; Wang, F.; et al. Fast factorized backprojection algorithm for one-stationary bistatic spotlight circular SAR image formation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1494–1510. [Google Scholar] [CrossRef]
- Xie, H.; Shi, S.; Li, F.; An, D.; Xiao, H.; Xie, C.; Fang, Q.; Wang, G.; Wang, L.; Wang, F.; et al. Fast time domain approach for bistatic forward-looking SAR imaging based on subaperture processing and local beamforming. In Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017; IEEE: Manhattan, NY, USA, 2017; pp. 240–245. [Google Scholar]
- Feng, D.; Xie, H.; An, D.; Huang, X. Fast factorized back projection algorithm for spotlight bistatic forward-looking low frequency UWB SAR. In Proceedings of the IET International Radar Conference 2015, Hangzhou, China, 14–16 October 2015. [Google Scholar]
- Liang, Y.; Li, G.; Wen, J.; Zhang, G.; Dang, Y.; Xing, M. A fast time-domain SAR imaging and corresponding autofocus method based on hybrid coordinate system. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8627–8640. [Google Scholar] [CrossRef]
- Tang, Y.; Xing, M.D.; Bao, Z. The polar format imaging algorithm based on double chirp-Z transforms. IEEE Geosci. Remote Sens. Lett. 2008, 5, 610–614. [Google Scholar] [CrossRef]
- Zhu, D.; Ye, S.; Zhu, Z. Polar format agorithm using chirp scaling for spotlight SAR image formation. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1433–1448. [Google Scholar] [CrossRef]
- Rigling, B.D.; Moses, R.L. Polar format algorithm for bistatic SAR. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1147–1159. [Google Scholar] [CrossRef]
- Miao, Y.; Wu, J.; Yang, J. Azimuth migration-corrected phase gradient autofocus for bistatic SAR polar format imaging. IEEE Geosci. Remote Sens. Lett. 2020, 18, 697–701. [Google Scholar] [CrossRef]
- Mao, X.; Zhu, D.; Zhu, Z. Polar format algorithm wavefront curvature compensation under arbitrary radar flight path. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; IEEE: Manhattan, NY, USA, 2011; Volume 2, pp. 1382–1385. [Google Scholar]
- Deng, H.; Li, Y.; Liu, M.; Mei, H.; Quan, Y. A space-variant phase filtering imaging algorithm for missile-borne BiSAR with arbitrary configuration and curved track. IEEE Sens. J. 2018, 18, 3311–3326. [Google Scholar] [CrossRef]
- Hu, C.; Zeng, T.; Long, T.; Yang, C. Forward-looking bistatic SAR range migration alogrithm. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; IEEE: Manhattan, NY, USA, 2006; pp. 1–4. [Google Scholar]
- Wu, J.; Huang, Y.; Xiong, J.; Yang, J. Range Migration Algorithm in Bistatic SAR Based on Squint Mode. In Proceedings of the 2007 IEEE Radar Conferenc, Waltham, MA, USA, 17–20 April 2007; IEEE: Manhattan, NY, USA, 2007; pp. 579–584. [Google Scholar]
- Li, Y.; Zhang, T.; Mei, H.; Quan, Y.; Xing, M. Focusing Translational-Variant Bistatic Forward- Looking SAR Data Using the Modified Omega-K Algorithm. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5203916. [Google Scholar] [CrossRef]
- Li, C.; Zhang, H.; Deng, Y.; Wang, R.; Liu, K.; Liu, D.; Jin, G.; Zhang, Y. Focusing the L-Band Spaceborne Bistatic SAR Mission Data Using a Modified RD Algorithm. IEEE Trans. Geosci. Remote Sens. 2020, 58, 294–306. [Google Scholar] [CrossRef]
- Wong, F.H.; Cumming, I.G.; Neo, Y.L. Focusing bistatic SAR data using the nonlinear chirp scaling algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef] [Green Version]
- Xiaolan, Q.; Donghui, H.; Chibiao, D. Non-linear chirp scaling algorithm for one-stationary bistatic SAR. In Proceedings of the 2007 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 5–9 November 2007; pp. 111–114. [Google Scholar] [CrossRef]
- Zeng, T.; Li, Y.; Ding, Z.; Long, T.; Yao, D.; Sun, Y. Subaperture approach based on azimuth-dependent range cell migration correction and azimuth focusing parameter equalization for maneuvering high-squint-mode SAR. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6718–6734. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, M.; Ai, G.; Wang, P.; Lv, K. Focusing of Bistatic SAR with Curved Trajectory Based on Extended Azimuth Nonlinear Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4160–4179. [Google Scholar] [CrossRef]
- Song, X.; Li, Y.; Zhang, T.; Li, L.; Gu, T. Focusing High-Maneuverability Bistatic Forward-Looking SAR Using Extended Azimuth Nonlinear Chirp Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5240814. [Google Scholar] [CrossRef]
- Li, S.; Zhong, H.; Yang, C.; Song, H.; Zhao, R.; Cao, J.; Xu, X. Focusing Nonparallel-Track Bistatic SAR Data Using Modified Frequency Extended Nonlinear Chirp Scaling. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4007105. [Google Scholar] [CrossRef]
- Wu, J.; Li, Z.; Huang, Y.; Yang, J.; Yang, H.; Liu, Q.H. Focusing bistatic forward-looking SAR with stationary transmitter based on keystone transform and nonlinear chirp scaling. IEEE Geosci. Remote Sens. Lett. 2013, 11, 148–152. [Google Scholar] [CrossRef]
- Zeng, T.; Wang, Z.; Liu, F.; Wang, C. An improved frequency-domain image formation algorithm for mini-UAV-based forward-looking spotlight BiSAR systems. Remote Sens. 2020, 12, 2680. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.; Cumming, I.G. A Two-Dimensional Spectrum for Bistatic SAR Processing Using Series Reversion. IEEE Geosci. Remote Sens. Lett. 2007, 4, 93–96. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| Carrier frequency | 15 | GHz |
| Pulse duration | 3 | µs |
| Range bandwidth | 800 | MHz |
| Sampling frequency | 1200 | MHz |
| Pulse repetition frequency | 1000 | Hz |
| Synthetic aperture time | 6 | s |
| Scene center coordinate | (2000, 500, 0) | m |
| Transmitter coordinates | (1050, −550, 600) | m |
| Receiver coordinates | (850, −650, 450) | m |
| Transmitter velocity | 25 | m/s |
| Receiver velocity | 30 | m/s |
| Points | Range Resolution (m) | Azimuth Resolution (Hz) | Range PSLR (dB) | Azimuth PSLR (dB) | Range ISLR (dB) | Azimuth ISLR (dB) |
|---|---|---|---|---|---|---|
| P1 | 0.1641 | 0.1484 | −12.97/−13.98 | −13.32/−12.35 | −10.54 | −9.99 |
| P2 | 0.1719 | 0.1458 | −13.14/−13.63 | −13.28/−13.11 | −10.37 | −10.18 |
| P3 | 0.1719 | 0.1458 | −13.82/−13.06 | −13.12/−13.18 | −10.40 | −10.16 |
| P4 | 0.1641 | 0.1484 | −13.61/−13.14 | −13.16/−13.28 | −10.33 | −10.20 |
| Points | Range Resolution (m) | Azimuth Resolution (Hz) | Range PSLR (dB) | Azimuth PSLR (dB) | Range ISLR (dB) | Azimuth ISLR (dB) |
|---|---|---|---|---|---|---|
| P1 | 2.6367 | 0.2051 | −13.64/−14.01 | −13.41/−13.04 | −11.97 | −10.15 |
| P2 | 2.6953 | 0.2014 | −13.84/−13.44 | −13.39/−13.04 | −11.37 | −10.20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Li, L.; Li, H.; Ke, M.; Ma, X.; Sun, X. An Improved UAV Bi-SAR Imaging Algorithm with Two-Dimensional Spatial Variant Range Cell Migration Correction and Azimuth Non-Linear Phase Equalization. Remote Sens. 2023, 15, 3734. https://doi.org/10.3390/rs15153734
Yan J, Li L, Li H, Ke M, Ma X, Sun X. An Improved UAV Bi-SAR Imaging Algorithm with Two-Dimensional Spatial Variant Range Cell Migration Correction and Azimuth Non-Linear Phase Equalization. Remote Sensing. 2023; 15(15):3734. https://doi.org/10.3390/rs15153734
Chicago/Turabian StyleYan, Junjie, Linghao Li, Han Li, Meng Ke, Xinnong Ma, and Xinshuai Sun. 2023. "An Improved UAV Bi-SAR Imaging Algorithm with Two-Dimensional Spatial Variant Range Cell Migration Correction and Azimuth Non-Linear Phase Equalization" Remote Sensing 15, no. 15: 3734. https://doi.org/10.3390/rs15153734