

Fiber Optic Acoustic Sensing to Understand and Affect the Rhythm of the Cities: Proof-of-Concept to Create Data-Driven Urban Mobility Models
 , , ,
, , ,  and
and
Abstract
:1. Introduction
1.1. Distributed Acoustic Sensing and Urban Traffic Monitoring Overview
1.2. Contributions of This Work
- An implementation of the DAS technology in an urban environment with a wide variety of dynamic mobility patterns is presented. Section 2.1 describes the testbed used.
- The signal processing needed, the different types of mobile elements sensed and feature extraction possibilities are exposed in Section 2.2–Section 2.4, respectively.
2. Materials and Methods
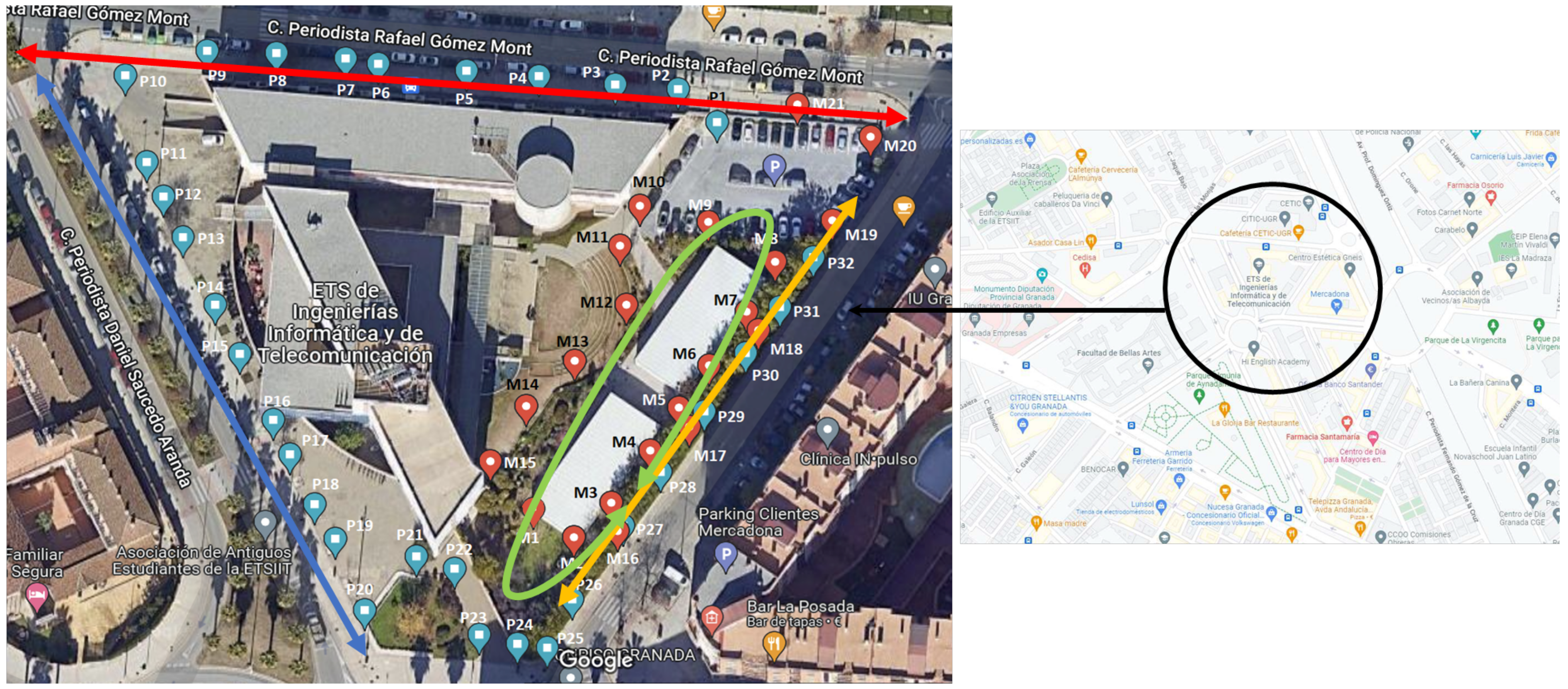
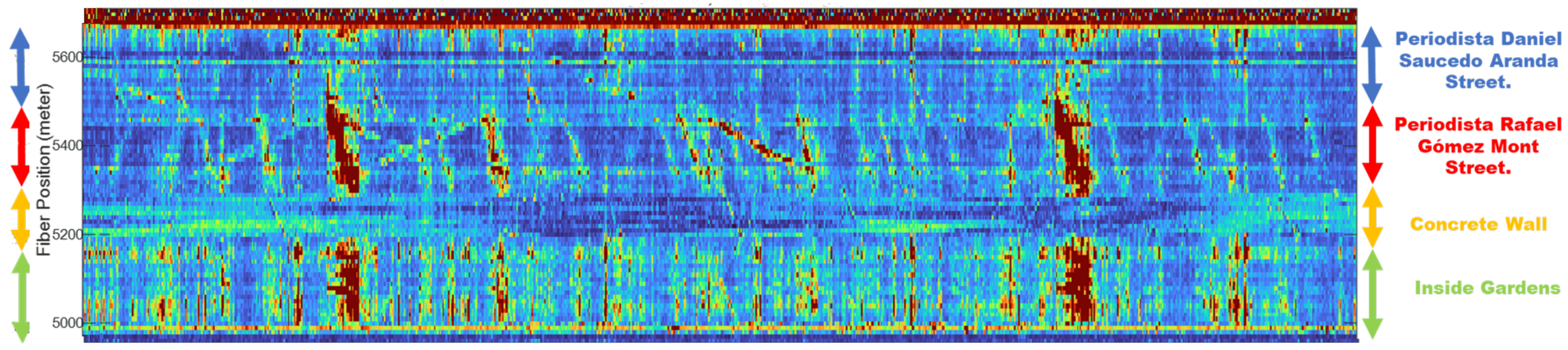
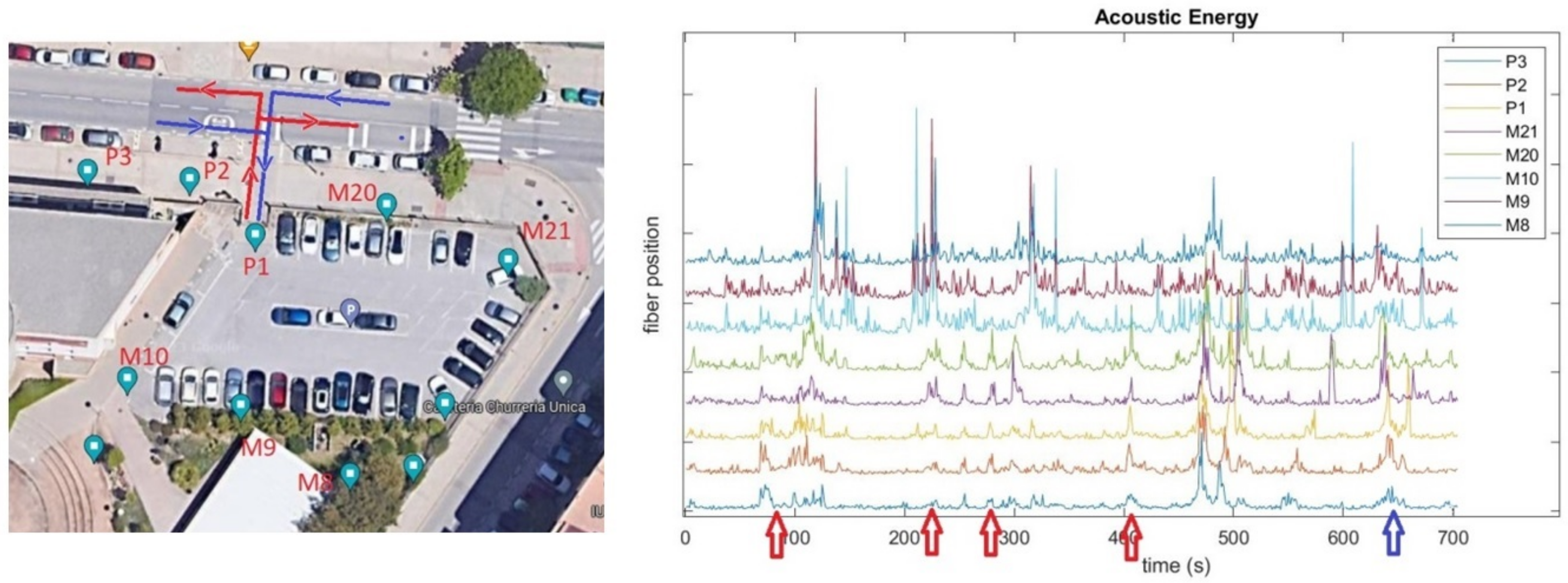
2.1. Testbed Description and Calibration Process
2.2. Signal Processing
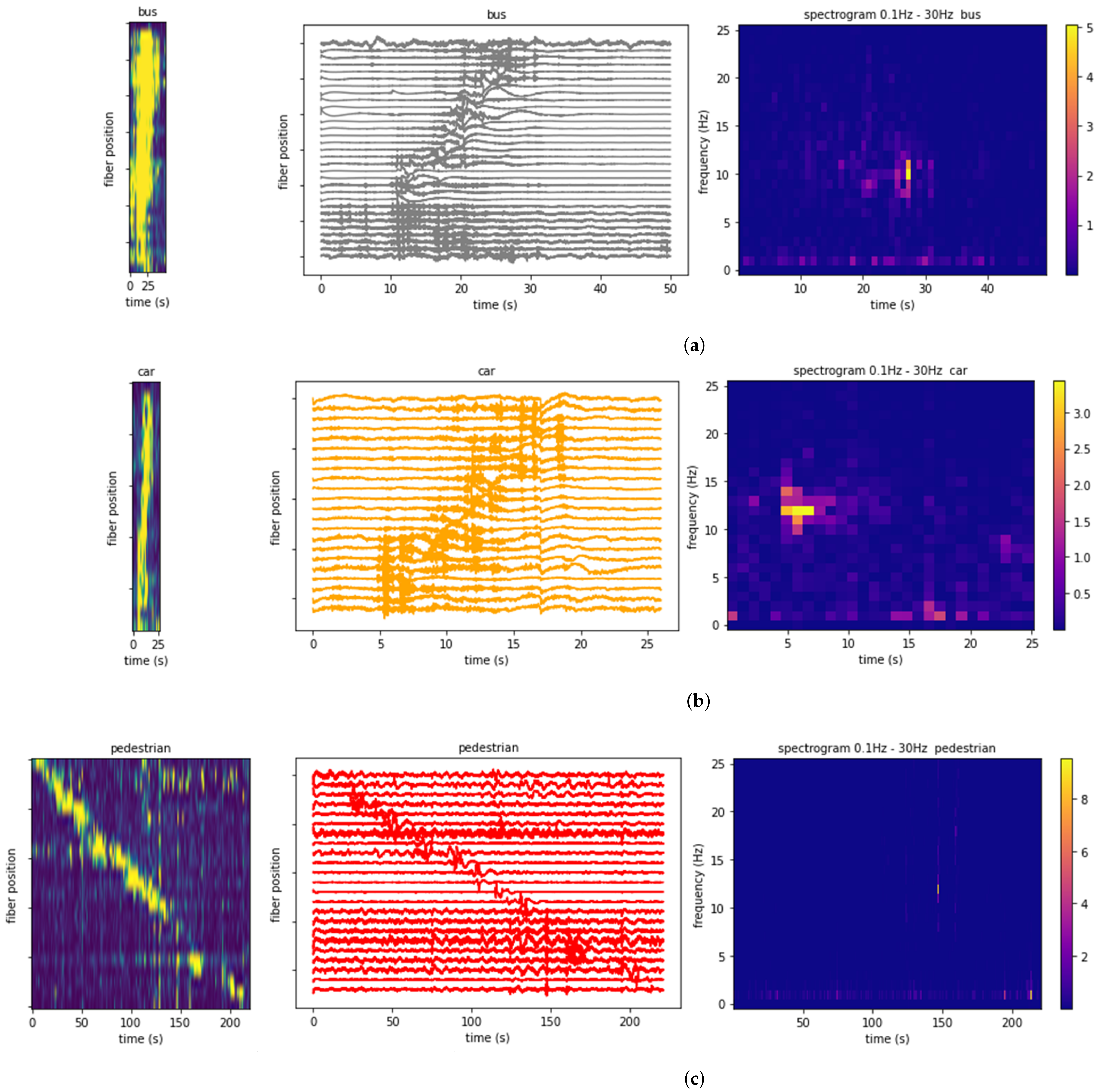
2.3. Types of Events Registered
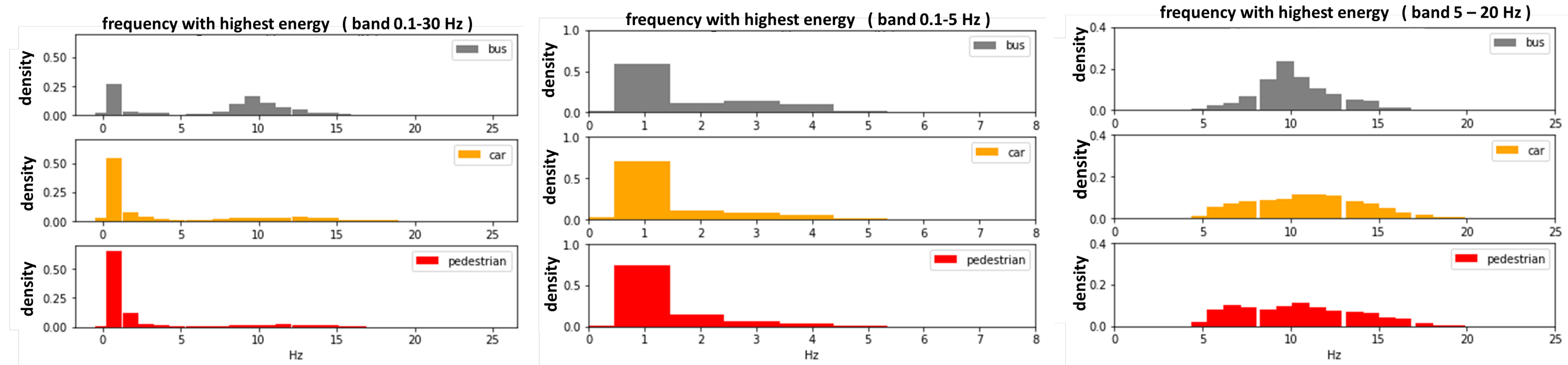
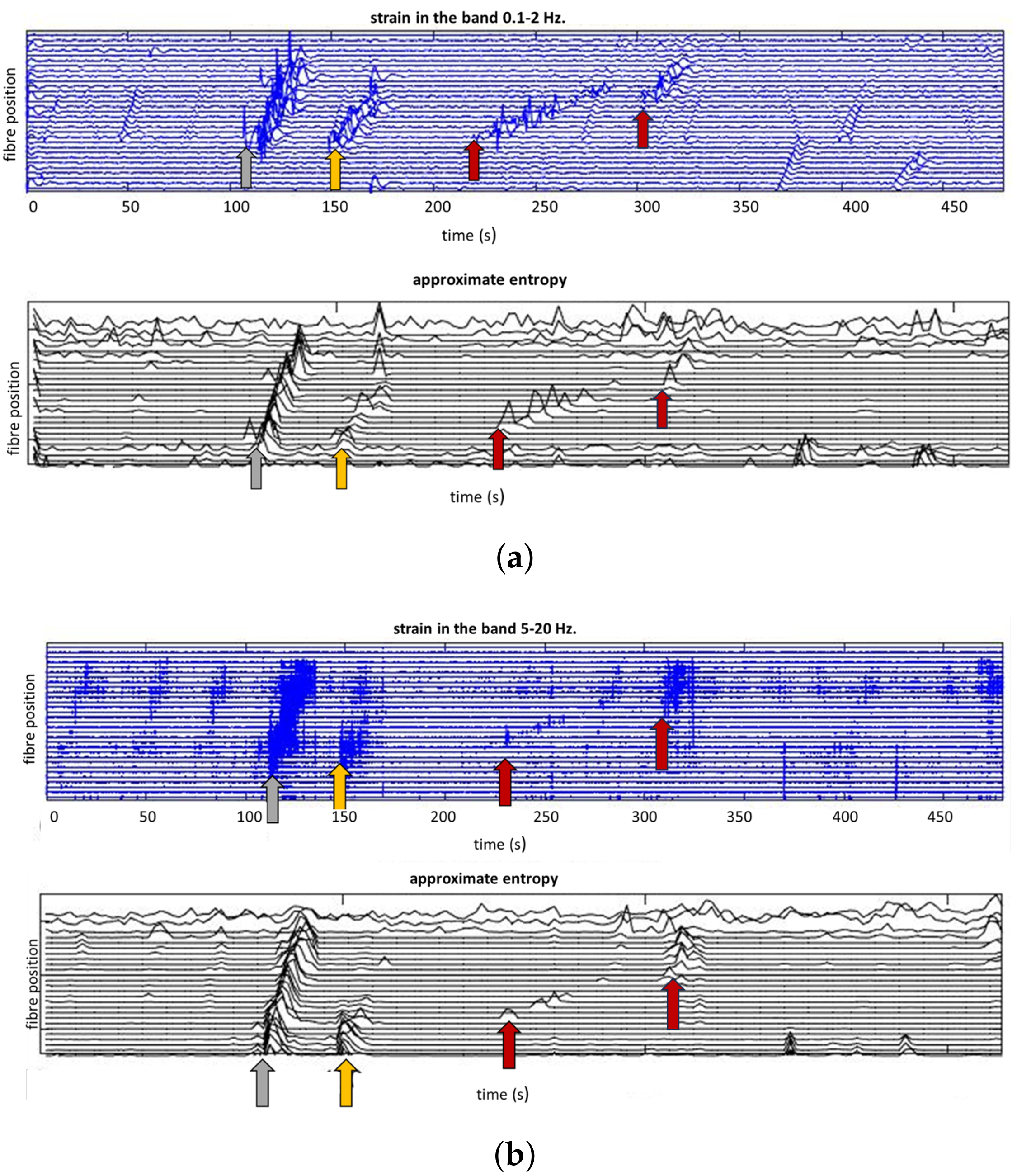
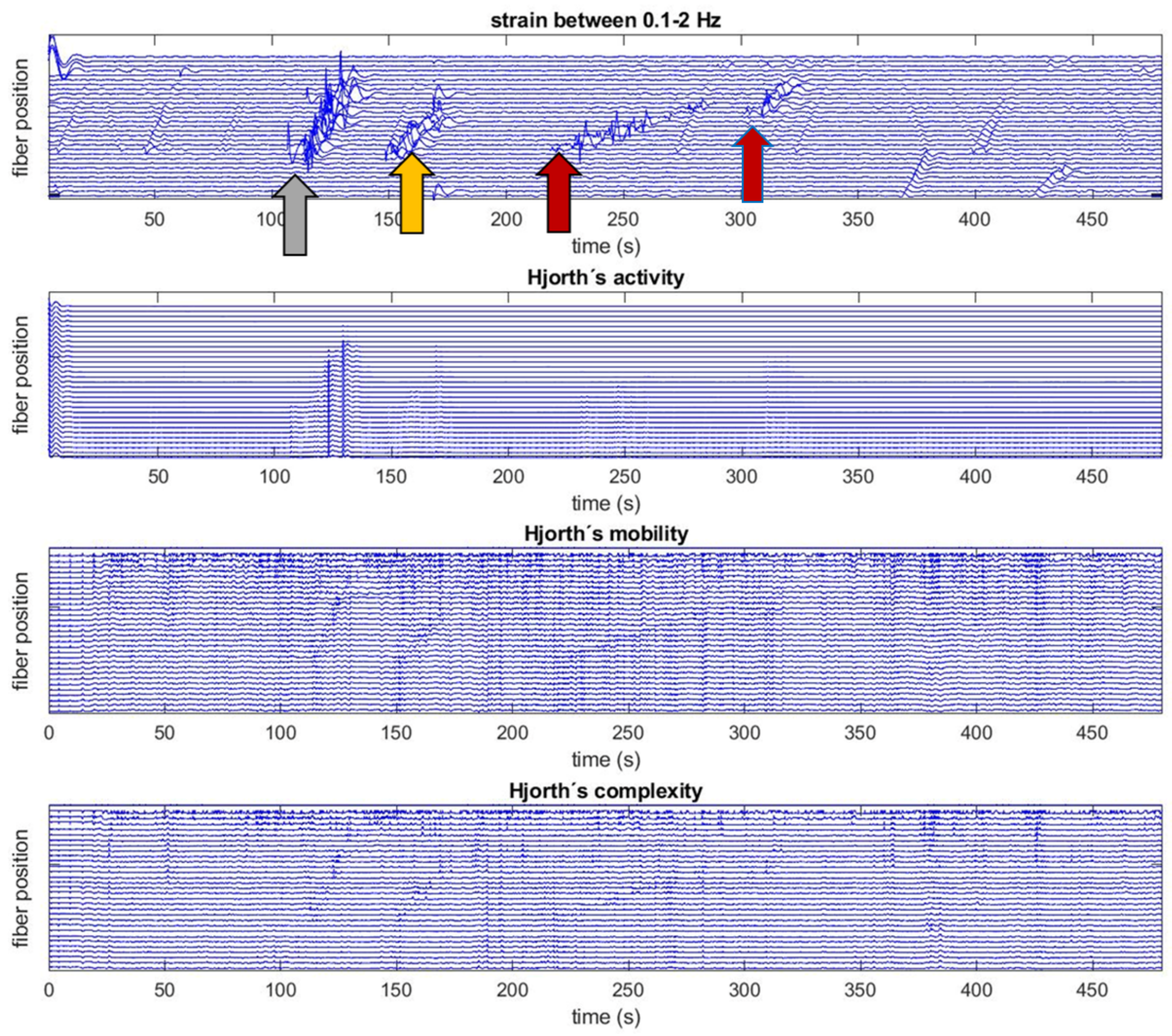
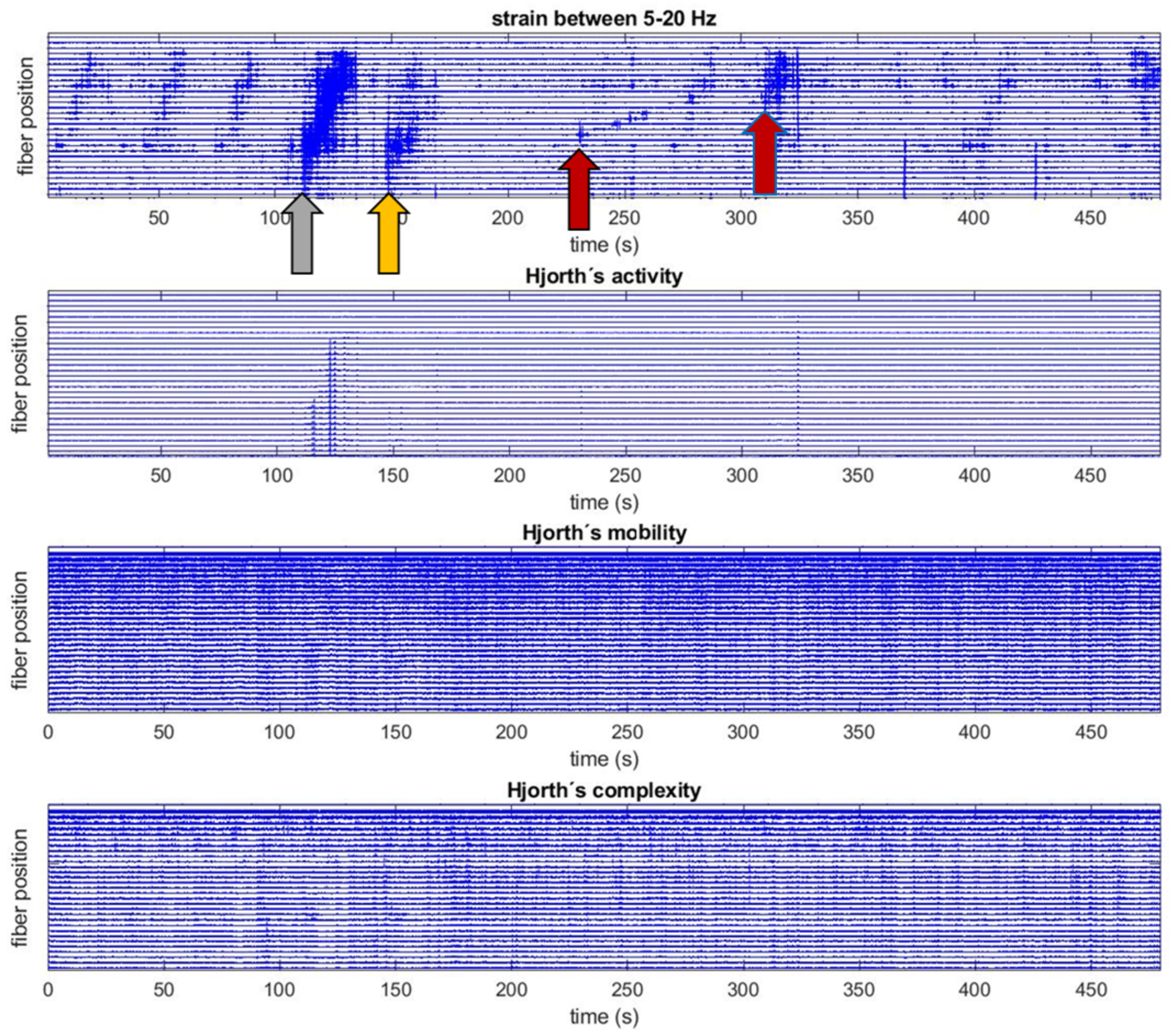
2.4. Characterization of the Events
3. Results
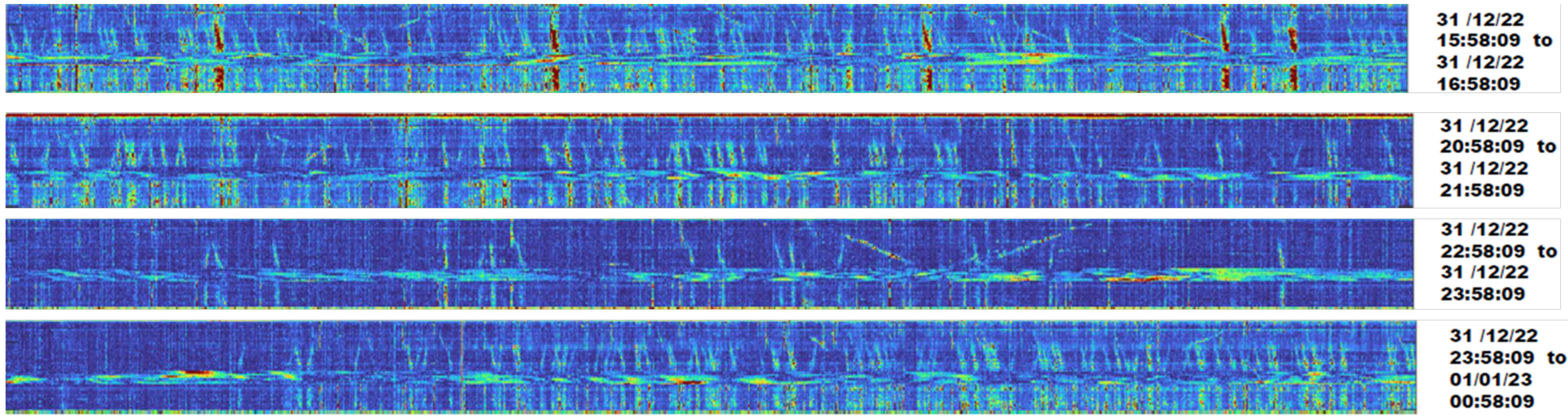
3.1. Example of Mobility Changes on New Year’s Eve
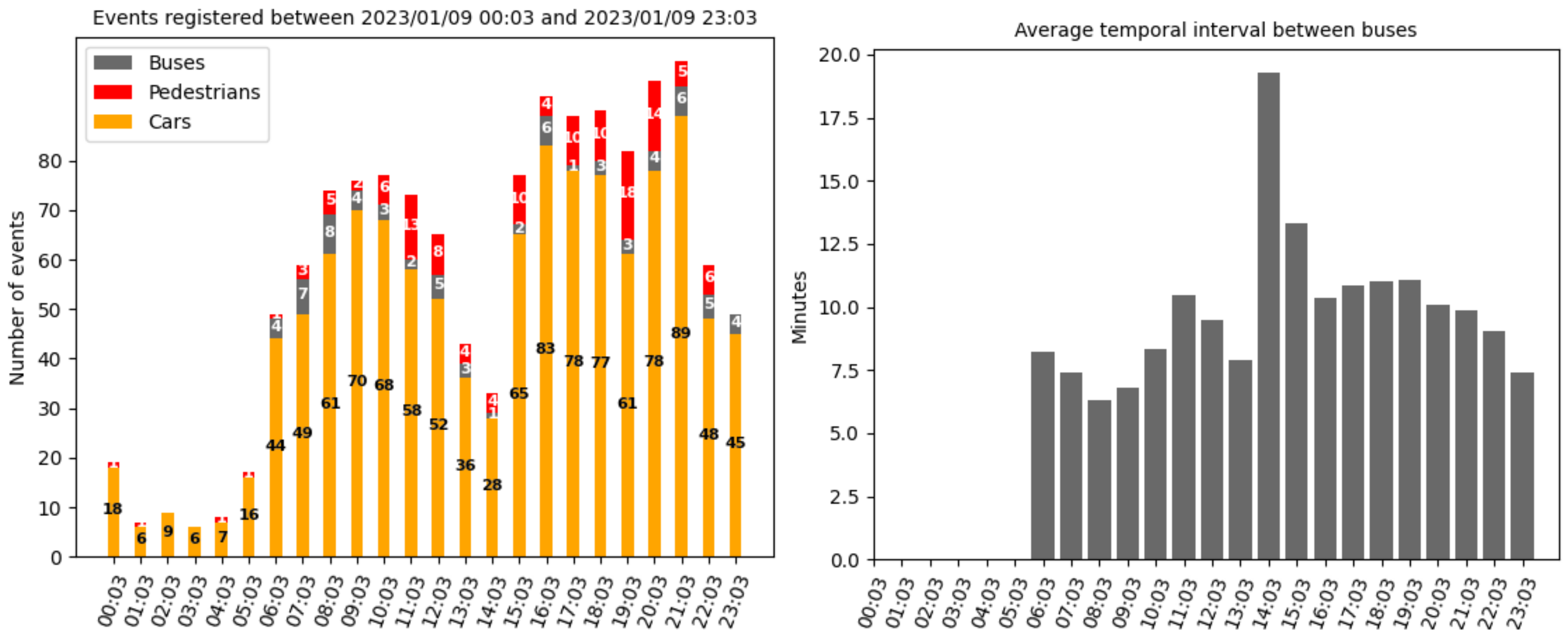
3.2. Example of Mobility during a Work Day
3.3. Monitoring Access to the Schools’s Surface Parking
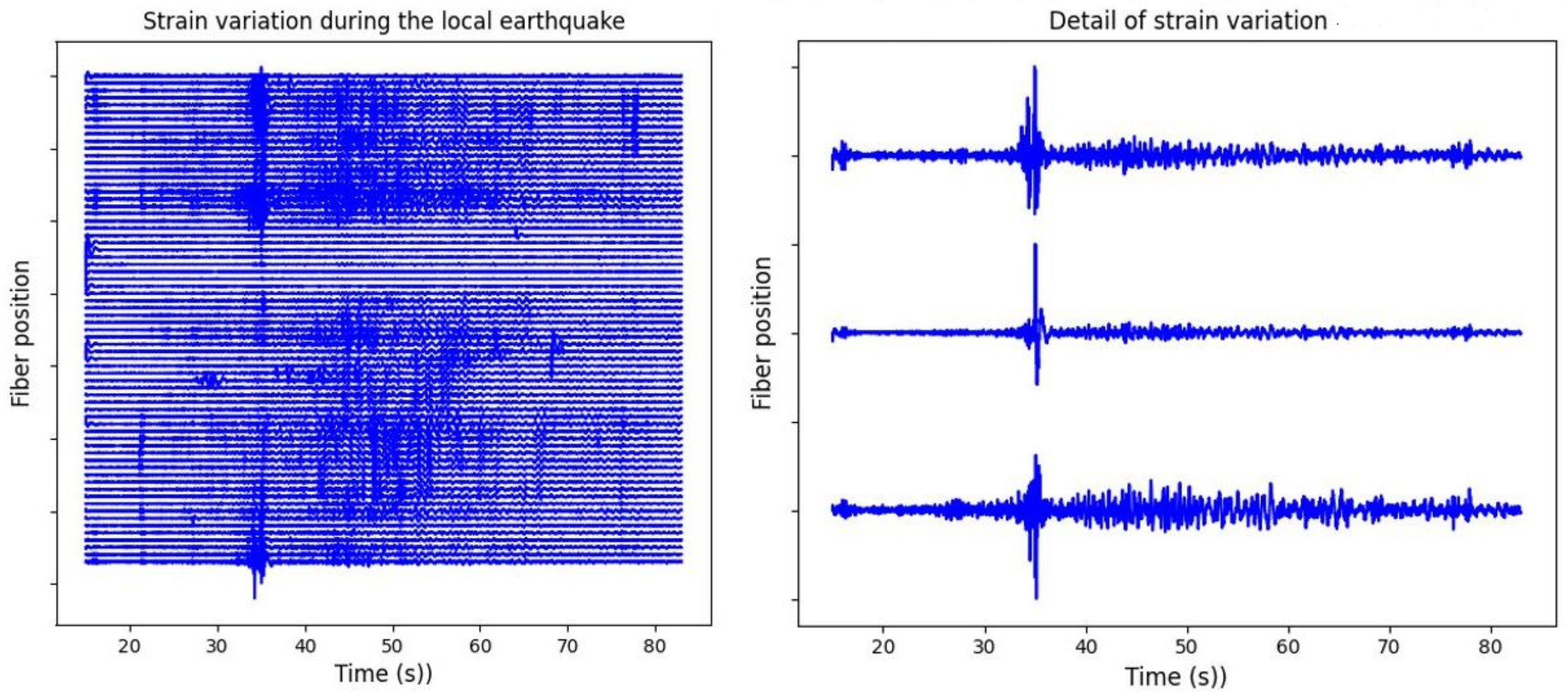
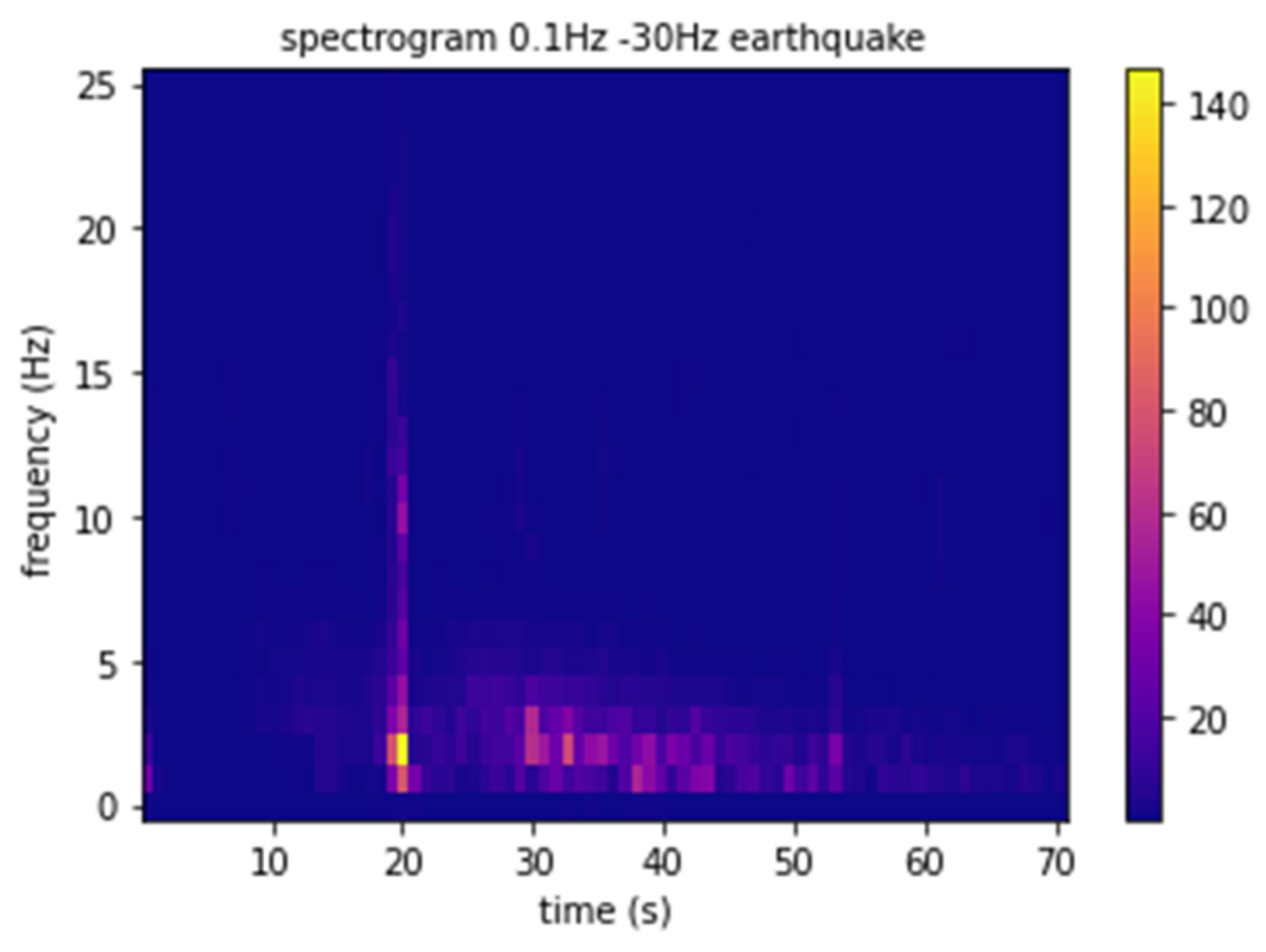
3.4. Urban Seismicity Monitoring
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


References
- United Nations. The Sustainable Development Goals Report 2022; United Nations Publications: New York, NY, USA, 2022. [Google Scholar]
- Blasi, S.; Ganzaroli, A.; De Noni, I. Smartening sustainable development in cities: Strengthening the linkage between smart cities and SDGs. Sustain. Cities Soc. 2022, 80, 103793. [Google Scholar] [CrossRef]
- Biyik, C.; Abaresho, A.; Paz, A.; Ruiz, R.A.; Battarra, R.; Rogers, C.D.F.; Lizarraga, C. Smart Mobility Adoption: A Review of the Literature. J. Open Innov. Technol. Mark. Complex. 2021, 7, 146. [Google Scholar] [CrossRef]
- Savithramma, R.M.; Ashwini, B.P.; Sumathi, R. Smart Mobility Implementation in Smart Cities: A Comprehensive Review on State-of-art Technologies. In Proceedings of the 4th IEEE International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 January 2022. [Google Scholar]
- Runyu, F.; Jun, L.; Weijing, S.; Wei, H.; Jning, Y.; Lizhe, W. Urban informal settlements classification via a transformer-based spatial-temporal fusion network using multimodal remote sensing andtime-series human activity data. Int. J. Appl. Earth Obs. Geoinf. 2022, 111, 102831. [Google Scholar]
- Ahyun, L.; Kang-Woo, L.; Kyong-Ho, K.; Sung-Woong, S. A Geospatial Platform to Manage Large-Scale Individual Mobility for an Urban Digital Twin Platform. Remote Sens. 2022, 14, 723. [Google Scholar]
- Loder, A.; Ambühl, L.; Menendez, M.; Axhausen, K.W. Understanding traffic capacity of urban networks. Sci. Rep. 2019, 9, 16283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Serok, N.; Havlin, S.; Blumenfeld Lieberthal, E. Identification, cost evaluation, and prioritization of urban traffic congestions and their origin. Sci. Rep. 2022, 12, 13026. [Google Scholar] [CrossRef]
- Huang, A.J.; Agarwal, S. Physics-Informed Deep Learning for Traffic State Estimation: Illustrations With LWR and CTM Models. IEEE Open J. Intell. Transp. Syst. 2022, 3, 503–518. [Google Scholar] [CrossRef]
- Medina-Salgado, B.; Sánchez-DelaCruz, E.; Pozos-Parra, P.; Sierra, J.E. Urban traffic flow prediction techniques: A review. Sustain. Comput. Inform. Syst. 2022, 35, 100739. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z. Designing the Controller-Based Urban Traffic Evaluation and Prediction Using Model Predictive Approach. Appl. Sci. 2022, 12, 1992. [Google Scholar] [CrossRef]
- Wu, J.; Wang, X.; Dang, Y.; Zhihan, L. Digital twins and artificial intelligence in transportation infrastructure: Classification, application, and future research directions. Comput. Electr. Eng. 2022, 101, 107983. [Google Scholar] [CrossRef]
- Butila, E.V.; Boboc, R.G. Urban Traffic Monitoring and Analysis Using Unmanned Aerial Vehicles (UAVs): A Systematic Literature Review. Remote Sens. 2022, 14, 620. [Google Scholar] [CrossRef]
- Liu, Z.; Jiang, S.; Zhou, P.; Li, M. A Participatory Urban Traffic Monitoring System: The Power of Bus Riders. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2851–2864. [Google Scholar] [CrossRef]
- Fredianelli, L.; Carpita, S.; Bernardini, M.; Del Pizzo, L.G.; Brocchi, F.; Bianco, F.; Licitra, G. Traffic Flow Detection Using Camera Images and Machine Learning Methods in ITS for Noise Map and Action Plan Optimization. Sensors 2022, 22, 1929. [Google Scholar] [CrossRef] [PubMed]
- Duan, Z.; Yang, Y.; Zhang, K.; Ni, Y.; Bajgain, S. Improved Deep Hybrid Networks for Urban Traffic Flow Prediction Using Trajectory Data. IEEE Access 2018, 6, 31820–31827. [Google Scholar] [CrossRef]
- Chen, Y.; Qin, R.; Zhang, G.; Albanwan, H. Spatial Temporal Analysis of Traffic Patterns during the COVID-19 Epidemic by Vehicle Detection Using Planet Remote-Sensing Satellite Images. Remote Sens. 2021, 13, 208. [Google Scholar] [CrossRef]
- Ji, B.; Zhang, X.; Mumtaz, S.; Han, C.; Li, C.; Wen, H.; Wang, D. Survey on the Internet of Vehicles: Network Architectures and Applications. IEEE Commun. Stand. Mag. 2020, 4, 34–41. [Google Scholar] [CrossRef]
- Bao, X.; Chen, L. Recent progress in Distributed Optic Sensors. Sensors 2012, 12, 8602–8639. [Google Scholar] [CrossRef] [Green Version]
- Lu, P.; Lalam, N.; Badar, M.; Liu, B.; Chorpening, B.; Buric, M.; Ohodnicki, P.R. Distributed optical fibre sensing: Review and perspective. Appl. Phys. Rev. 2019, 6, 041302. [Google Scholar] [CrossRef]
- Pastor-Graekks, J.; Martins, H.F.; Garcia-Ruiz, A.; Martin-Lopez, S.; Gonzalez-Herraez, M.R. Single-shot distributed temperature and strain tracking using direct detection phase-sensitive OTDR with chirped pulses. Opt. Express 2016, 24, 13122. [Google Scholar]
- Tu, G.; Zhang, X.; Zhang, Y.; Zhu, F.; Xia, L.; Nakarmi, B. The development of an Phi-OTDR system for quantitative vibration measurement. IEEE Photonics Technol. Lett. 2015, 27, 1349–1352. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, L.; Wang, S.; Xue, N.; Peng, F.; Fan, M.; Sun, W.; Qian, X.; Rao, J.; Rao, Y. Coherent Φ-OTDR based on I/Q demodulation and homodyne detection. Opt. Express 2016, 24, 853–858. [Google Scholar] [CrossRef] [PubMed]
- Juarez, J.C.; Taylor, H.F. Polarization discrimination in a phase-sensitive optical time-domain reflectometer intrusion-sensor system. Opt. Lett. 2005, 30, 3284–3286. [Google Scholar] [CrossRef] [PubMed]
- Fernández-Ruiz, M.R.; Costa, L.; Martins, F.H. Distributed Acoustic Sensing Using Chirped-Pulse Phase-Sensitive OTDR Technology. Sensors 2019, 19, 4368. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koyamada, Y.; Imahama, M.; Kubota, K.; Hogari, K. Fiber-optic distributed strain and temperature sensing with very high measurand resolution over long range using coherent OTDR. J. Light. Technol. 2009, 27, 1142–1146. [Google Scholar] [CrossRef]
- Martuganova, E.; Stiller, M.; Norden, B.; Henninges, J.; Krawczyk, C.M. 3D deep geothermal reservoir imaging with wireline distributed acoustic sensing in two boreholes. Solid Earth 2002, 13, 1291–1307. [Google Scholar] [CrossRef]
- Young, C.; Shragge, J.; Schultz, W.; Haines, S.; Oren, C.; Simmons, J.; Collett, T.S. Advanced Distributed Acoustic Sensing Vertical Seismic Profile Imaging of an Alaska North Slope Gas Hydrate Field. Energy Fuels 2022, 36, 3481–3495. [Google Scholar] [CrossRef]
- Dou, S.; Lindsey, N.; Wagner, A.M.; Daley, T.M.; Freifeld, B.; Robertson, M.; Peterson, J.; Ulrich, C.; Martin, E.R.; Ajo-Franklin, J.B. Distributed Acoustic Sensing for Seismic Monitoring of The Near Surface: A Traffic-Noise Interferometry Case Study. Sci. Rep. 2017, 7, 11620. [Google Scholar] [CrossRef] [Green Version]
- Zhan, Z. Distributed acoustic sensing turns fiber-optic cables into sensitive seismic antennas. Seismol. Res. Lett. 2020, 91, 1–15. [Google Scholar] [CrossRef]
- Fernández-Ruiz, M.R.; Martins, H.F.; Williams, E.F.; Becerril, C.; Magalhães, R.; Costa, L.; Martin-Lopez, S.; Jia, Z.; Zhan, Z.; González-Herráez, M. Seismic Monitoring with Distributed Acoustic Sensing from the Near-Surface to the Deep Oceans. J. Light. Technol. 2022, 40, 1453–1463. [Google Scholar] [CrossRef]
- Jousset, P.; Currenti, G.; Schwarz, B.; Chalari, A.; Tilmann, F.; Reinsch, T.; Zuccarello, L.; Privitera, E.; Krawczyk, C.M. Fibre optic distributed acoustic sensing of volcanic events. Nat. Commun. 2022, 13, 1753. [Google Scholar] [CrossRef]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Corredera, P.; Martin-Lopez, S. Machine learning methods for pipeline surveillance systems based on distributed acoustic sensing: A review. Appl. Sci. 2017, 7, 841. [Google Scholar] [CrossRef] [Green Version]
- Bado, M.F.; Tonelli, D.; Poli, F.; Zonta, D.; Casas, J.R. Digital Twin for Civil Engineering Systems: An Exploratory Review for Distributed Sensing Updating. Sensors 2022, 22, 3168. [Google Scholar] [CrossRef] [PubMed]
- Martin, R.; Bruce, G. Monitoring Traffic Flow. International Patent PCT/GB2016/053330, 26 October 2016. [Google Scholar]
- Liu, H.; Ma, J.; Yan, W.; Liu, W.; Zhang, X.; Li, C. Traffic flow detection using distributed fiber optic acoustic sensing. IEEE Access 2018, 6, 68968–68980. [Google Scholar] [CrossRef]
- Hall, A.J.; Minto, C. Using fibre optic cables to deliver intelligent traffic management in smart cities. In Proceedings of the International Conference on Smart Insfrastructure and Construction, Cambridge, UK, 8–10 July 2019. [Google Scholar]
- Wang, X.; Williams, E.F.; Karrenbach, M.; González Herráez, M.; Martins , H.F.; Zhan, Z. Rose Parade Seismology: Signatures of Floats and Bands on Optical Fiber. Seismol. Res. Lett. 2020, 91, 2395–2398. [Google Scholar] [CrossRef]
- Jakkampudi, S.; Shen, J.; Weichen, L.; Dev, A.; Zhu, T.; Martin, E. Footstep detection in urban seismic data with a convolutional network. Lead. Edge 2020, 39, 654–660. [Google Scholar] [CrossRef]
- Liu, H.; Ma, J.; Xu, T.; Yan, W.; Ma, L.; Zhang, X. Vehicle Detection and Classification Using Distributed Fiber Optic Acoustic Sensing. IEEE Trans. Veh. Technol. 2020, 69, 1363–1374. [Google Scholar] [CrossRef]
- Lindsey, N.J.; Yuan, S.; Lellouch, A.; Gualtieri, L.; Lecocq, T.; Biondi, B. City-Scale Dark Fiber DAS Measurements of Infrastructure Use During the COVID-19 Pandemic. Geophys Res. Lett. 2020, 47, e2020GL089931. [Google Scholar] [CrossRef]
- Peng, Z.; Wen, H.; Jian, J.; Gribok, A.; Wang, M.; Huang, S.; Liu, H.; Mao, Z.H.; Chen, K.P. Identifications and classifications of human locomotion using Rayleigh-enhanced distributed fiber acoustic sensors with deep neural networks. Sci. Rep. 2020, 10, 21014. [Google Scholar] [CrossRef]
- Wang, X.; Zhan, Z.; Williams, E.F.; Herráez, M.G.; Martins, H.F.; Karrenbach, M. Ground vibrations recorded by fiber-optic cables reveal traffic response to COVID-19 lockdown measures in Pasadena, California. Commun. Earth Environ. 2021, 2, 160. [Google Scholar] [CrossRef]
- Ende, M.v.; Ferrari, A.; Sladen, A.; Richard, C. Next-Generation Traffic Monitoring with Distributed Acoustic Sensing Arrays and Optimum Array Processing. In Proceedings of the 2021 55th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 31 October–3 November 2021; pp. 1104–1108. [Google Scholar]
- Wang, H.; Chen, Y.; Min, R.; Chen, Y. Urban DAS Data Processing and Its Preliminary Application to City Traffic Monitoring. Sensors 2022, 22, 9976. [Google Scholar] [CrossRef]
- Van den Ende, M.; Ferrari, A.; Sladen, A.; Richard, C. Deep Deconvolution for Traffic Analysis with Distributed Acoustic Sensing Data. IEEE Trans. Intell. Transp. Syst. 2022, 24, 2947–2962. [Google Scholar] [CrossRef]
- Lindsey, N.J.; Rademacher, H.; Ajo-Franklin, J.B. On the broadband instrument response of fiber-optic DAS arrays. J. Geophys. Res. Solid Earth 2020, 125, e2019JB018145. [Google Scholar] [CrossRef]
- Van den Ende, M.; Lior, I.; Ampuero, J.P.; Sladen, A. A Self-Supervised Deep Learning Approach for Blind Denoising and Waveform Coherence Enhancement in Distributed Acoustic Sensing Data. IEEE Trans. Neural Netw. Learn. Syst. 2021. early access. [Google Scholar] [CrossRef] [PubMed]
- Ponce-Flores, M.; Frausto-Solís, J.; Santamaría-Bonfil, G.; Pérez-Ortega, J.; González-Barbosa, J.J. Time Series Complexities and Their Relationship to Forecasting Performance. Entropy 2020, 22, 89. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Hu, J.; Tung, W. Entropy measures for biological signal analyses. Nonlinear Dyn. 2012, 68, 431–444, ISSN 0278-5846. [Google Scholar] [CrossRef]
- Fernández, A.; Gómez, G.; Hornero, R.; López-Ibor, J.J. Complexity and schizophrenia. Prog. Neuro Psychopharmacol. Biol. Psychiatry 2013, 45, 267–276, ISSN 0278-5846. [Google Scholar] [CrossRef]
- Chen, C.; Jin, Y.; Lo, I.L.; Zhao, H.; Sun, B.; Zhao, Q.; Zheng, J.; Zhang, X.D. Complexity Change in Cardiovascular Disease. Int. J. Biol. Sci. 2017, 13, 1320–1328. [Google Scholar] [CrossRef]
- Asgharzadeh-Bonab, A.; Chehel, M.; Mehri, A. Spectral entropy and deep convolutional neural network for ECG beat classification. Biocybern. Biomed. Eng. 2020, 40, 691–700, ISSN 0208-5216. [Google Scholar] [CrossRef]
- Rizal, A.; Hidayat, R.; Nugroho, H.A. Entropy measurement as features extraction in automatic lung sound classification. In Proceedings of the 2017 International Conference on Control, Electronics, Renewable Energy and Communications (ICCREC), Yogyakarta, Indonesia, 26–28 September 2017; pp. 93–97. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Liu, Z.; Liang, X.; Liang, X.; Si, S. The Entropy Algorithm and Its Variants in the Fault Diagnosis of Rotating Machinery: A Review. IEEE Access 2018, 6, 66723–66741. [Google Scholar] [CrossRef]
- Olbrys, J.; Majewska, E. Approximate entropy and sample entropy algorithms in financial time series analyses. Procedia Comput. Sci. 2022, 207, 255–264, ISSN 1877-0509. [Google Scholar] [CrossRef]
- Pincus, A. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hjorth, B. EEG analysis based on time domain properties. Electroencephalogr. Clin. Neurophysiol. 1970, 9, 306–310, ISSN 0013-4694. [Google Scholar] [CrossRef] [PubMed]
- Briechle, K.; Hanebeck, U. Template matching using fast normalized cross correlation. Proc. SPIE Int. Soc. Opt. Eng. 2001, 4387, 1–8. [Google Scholar]
- IGN. Earthquake information. Available online: https://www.ign.es/web/ign/portal/ultimos-terremotos/-/ultimos-terremotos/getDetails?evid=es2022zpswu (accessed on 25 June 2023).
- García, L.; Alguacil, G.; Titos, M.; Cocina, O.; De la Torre, A.Ç.; Benítez, C. Automatic S-Phase Picking for Volcano-Tectonic Earthquakes Using Spectral Dissimilarity Analysis. IEEE Geosci. Remote. Sens. Lett. 2020, 17, 874–878. [Google Scholar] [CrossRef]
- Baird, A.F. Modelling the response of helically wound DAS cables to microseismic arrivals. In Proceedings of the First EAGE Workshop on Fiber Optic Sensing, Amsterdam, The Netherlands, 9–11 March 2020; European Association of Geoscientists & Engineers: Amsterdam, The Netherlands, 2020; pp. 1–5. [Google Scholar]
- Hudson, T.S.; Baird, A.F.; Kendall, J.M.; Kufner, S.K.; Brisbourne, A.M.; Smith, A.M.; Butcher, A.; Chalari, A.; Clarke, A. Distributed Acoustic Sensing (DAS) for natural microseismicity studies: A case study from Antarctica. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021493. [Google Scholar] [CrossRef]
- Jreij, S.F.; Trainor-Guitton, W.J.; Morphew, M.; Chen Ning, I.L. The Value of Information From Horizontal Distributed Acoustic Sensing Compared to Multicomponent Geophones Via Machine Learning. J. Energy Resour. Technol. 2021, 143, 010902. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Objective | Signal Processing | Sensing Scenario |
|---|---|---|---|
| patent, 2016, [35] | vehicles detection, traffic flow, speed measurements | [-] | [-] |
| journal, 2018, [36] | vehicle detection and counting, speed estimation | wavelet-threshold denoising and dual threshold detection. | 200 m. road in the NanShan Iron mine (China) during seismic trial |
| congress, 2019, [37] | average speed, flow rate, queue detection, congestion detection, journey times, traffic count | [-] | [-] |
| journal, 2020, [38] | signatures of floats, bands, motorcycles | detrending, filtering, noise removal, frequency analysis | 2.5 km of fiber underneath the Rose Parade route, Pasadena(USA) |
| congress, 2020, [39] | detect pedestrian footstep | convolutional neural network | 5km Pennsylvania State University campus |
| journal, 2020, [40] | vehicle detection and classification, vehicle count, speed measurement | wavelet denoising, dual-threshold detection, feature extraction, vehicle classification with SVM | 320 m. campus road of Beijing Jiaotong University (China) |
| journal, 2020, [41] | vehicle detection, counting and characterization | frequency analysis, template matching | 4 km. Telecom. cable running through Palo Alto, CA, leased from Stanford University IT Services (USA) |
| journal, 2020, [42] | human locomotion detection (walking, running, different shoes) | frequency analysis, shallow and deep Neural Networks | 15-m-long hallway. |
| journal, 2021, [43] | vehicle counting, traffic volume, average speed | detrending, filtering, noise removal, frequency analysis | 37 km. Caltech-Pasadena City DAS array (USA). |
| conference, 2021, [44] | estimation of individual simultaneous vehicles velocity in multiple lane roads | frequency domain MUSIC beamforming | commercial telecom. cable parallel to a main road in Toulon(France). |
| journal, 2022, [45] | speed and volume estimate of traffic flow | frequency analysis, F-K filtering for noise removal | 50 km. of telecom. cable inside the city of Hangzhou (China). |
| journal, 2022, [46] | counting and velocity estimation for individual vehicles in challenging scenarios without spatial/temporal separation | self-supervised deconvolution autoencoder | 14 km. commercial telecomm. along a main road connecting Alba-la-Romaine, Saint-Thomé, and Valvignères (France). |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García, L.; Mota, S.; Titos, M.; Martínez, C.; Segura, J.C.; Benítez, C. Fiber Optic Acoustic Sensing to Understand and Affect the Rhythm of the Cities: Proof-of-Concept to Create Data-Driven Urban Mobility Models. Remote Sens. 2023, 15, 3282. https://doi.org/10.3390/rs15133282
García L, Mota S, Titos M, Martínez C, Segura JC, Benítez C. Fiber Optic Acoustic Sensing to Understand and Affect the Rhythm of the Cities: Proof-of-Concept to Create Data-Driven Urban Mobility Models. Remote Sensing. 2023; 15(13):3282. https://doi.org/10.3390/rs15133282
Chicago/Turabian StyleGarcía, Luz, Sonia Mota, Manuel Titos, Carlos Martínez, Jose Carlos Segura, and Carmen Benítez. 2023. "Fiber Optic Acoustic Sensing to Understand and Affect the Rhythm of the Cities: Proof-of-Concept to Create Data-Driven Urban Mobility Models" Remote Sensing 15, no. 13: 3282. https://doi.org/10.3390/rs15133282