
Performance Assessment of Structural Monitoring of a Dedicated High-Speed Railway Bridge Using a Moving-Base RTK-GNSS Method
 ,
,  , , ,
, , ,
Abstract
:1. Introduction
2. Methods
2.1. Moving-Base RTK-GNSS Observation Model
2.2. The Influence of Initial Coordinate Deviation of Reference Station on Positioning Solutions

2.3. Parameter Estimation and Ambiguity Resolution
3. Experimental Analysis and Results
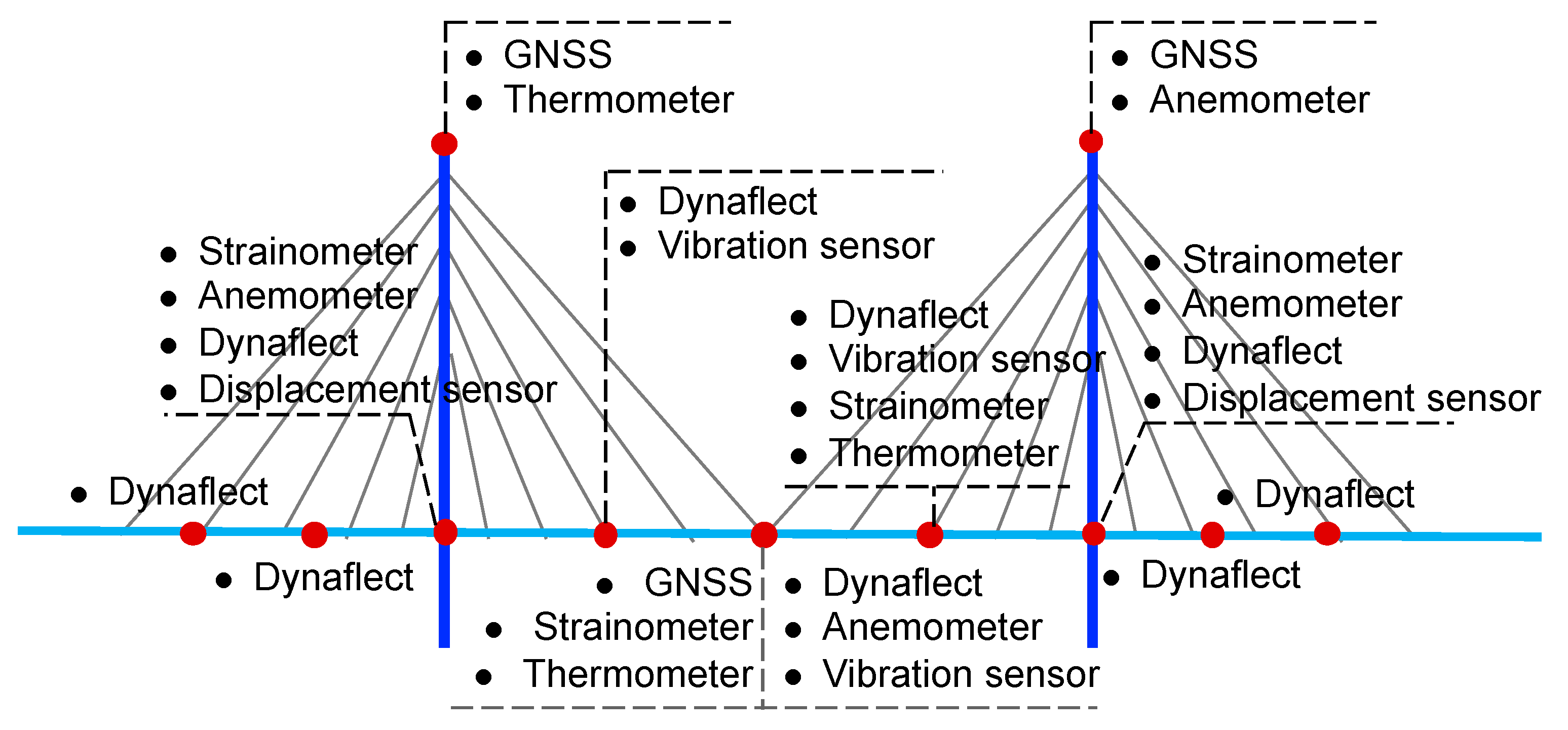
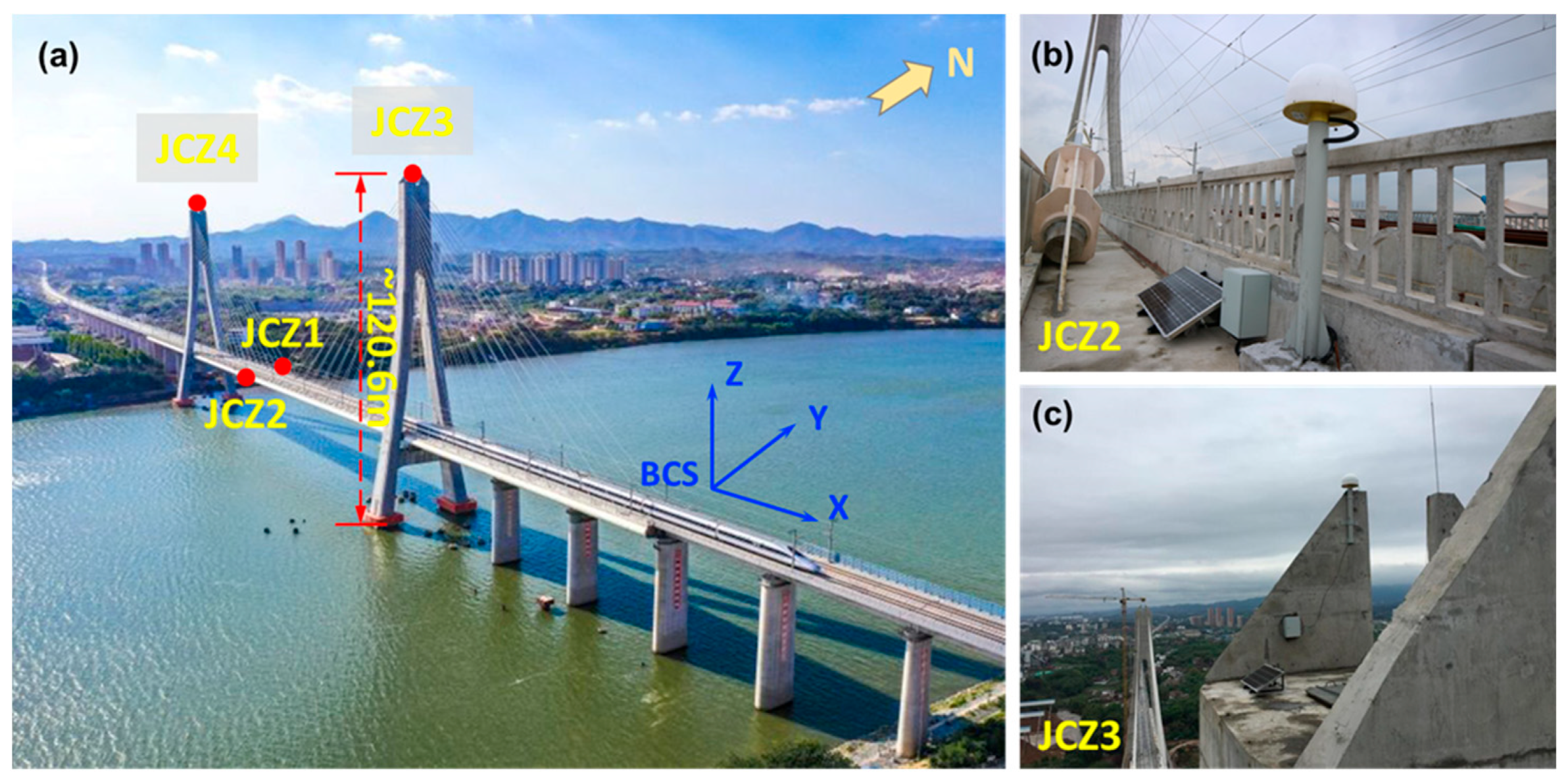
3.1. Ganjiang Bridge and SHM System
3.2. GNSS Data Description and Processing
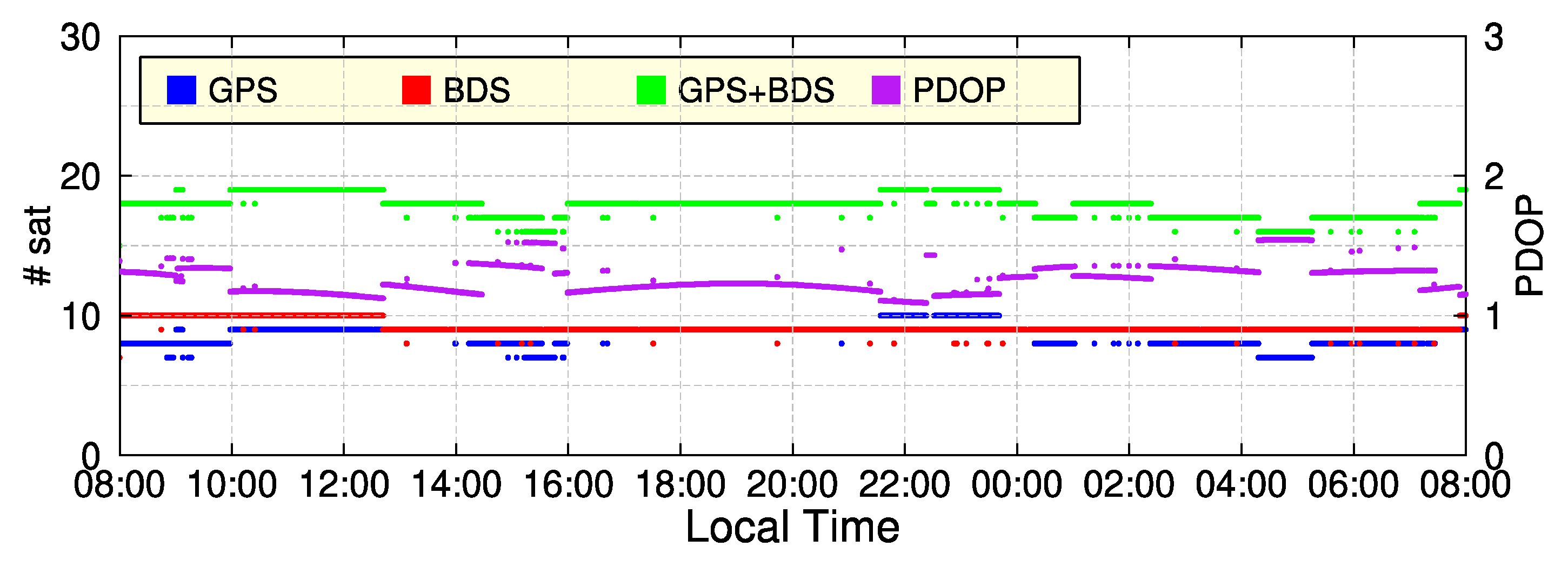
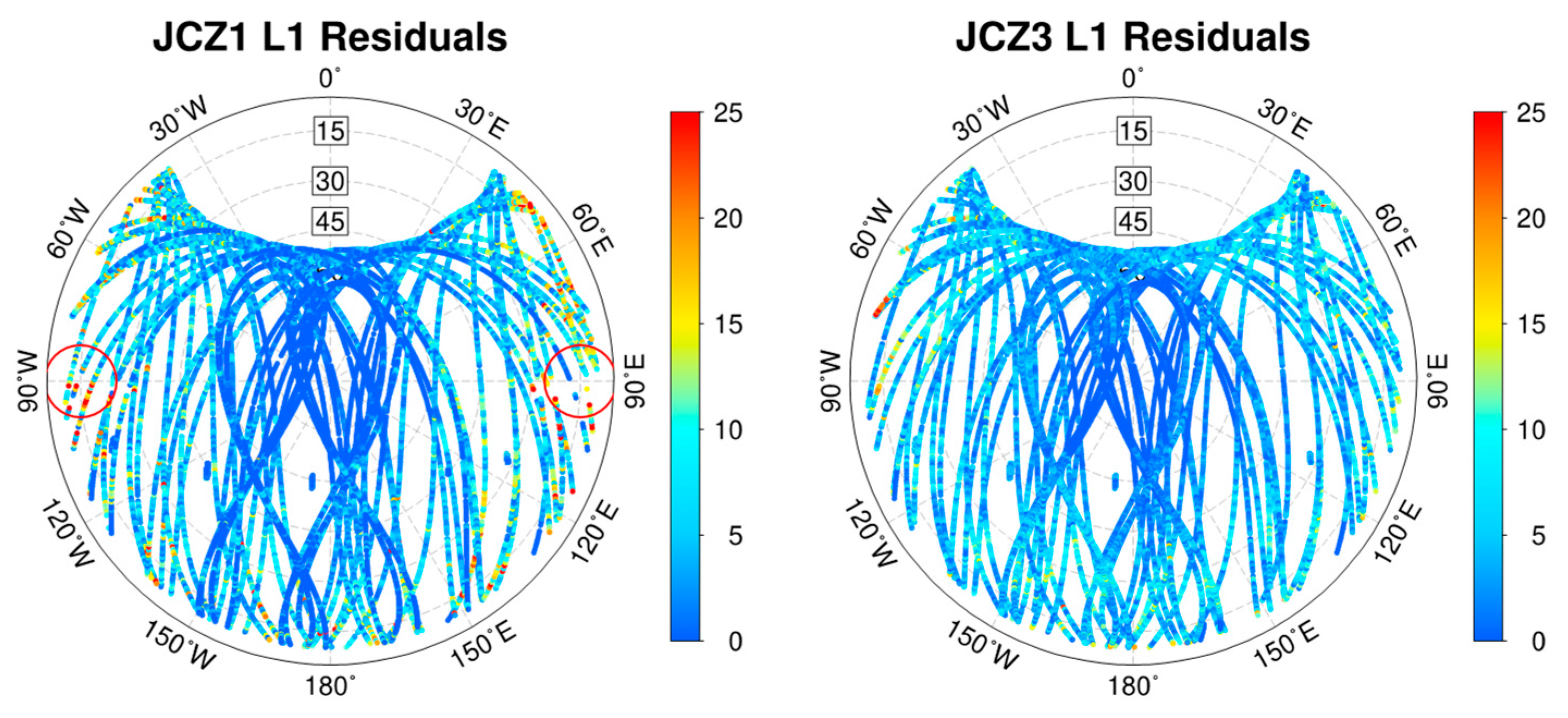
3.3. GNSS Data Quality Analysis
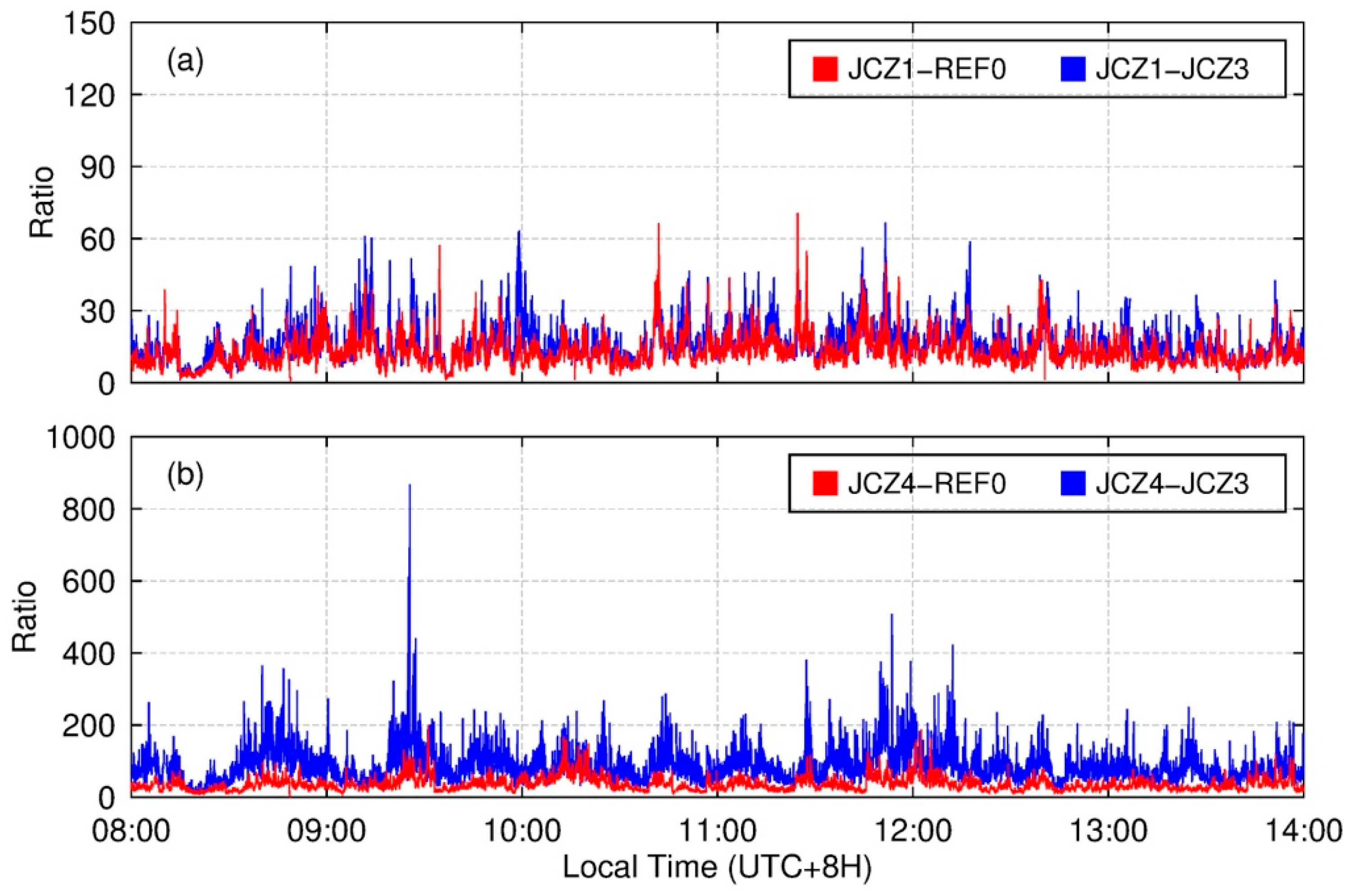
3.4. Ambiguity Resolution Performance Analysis
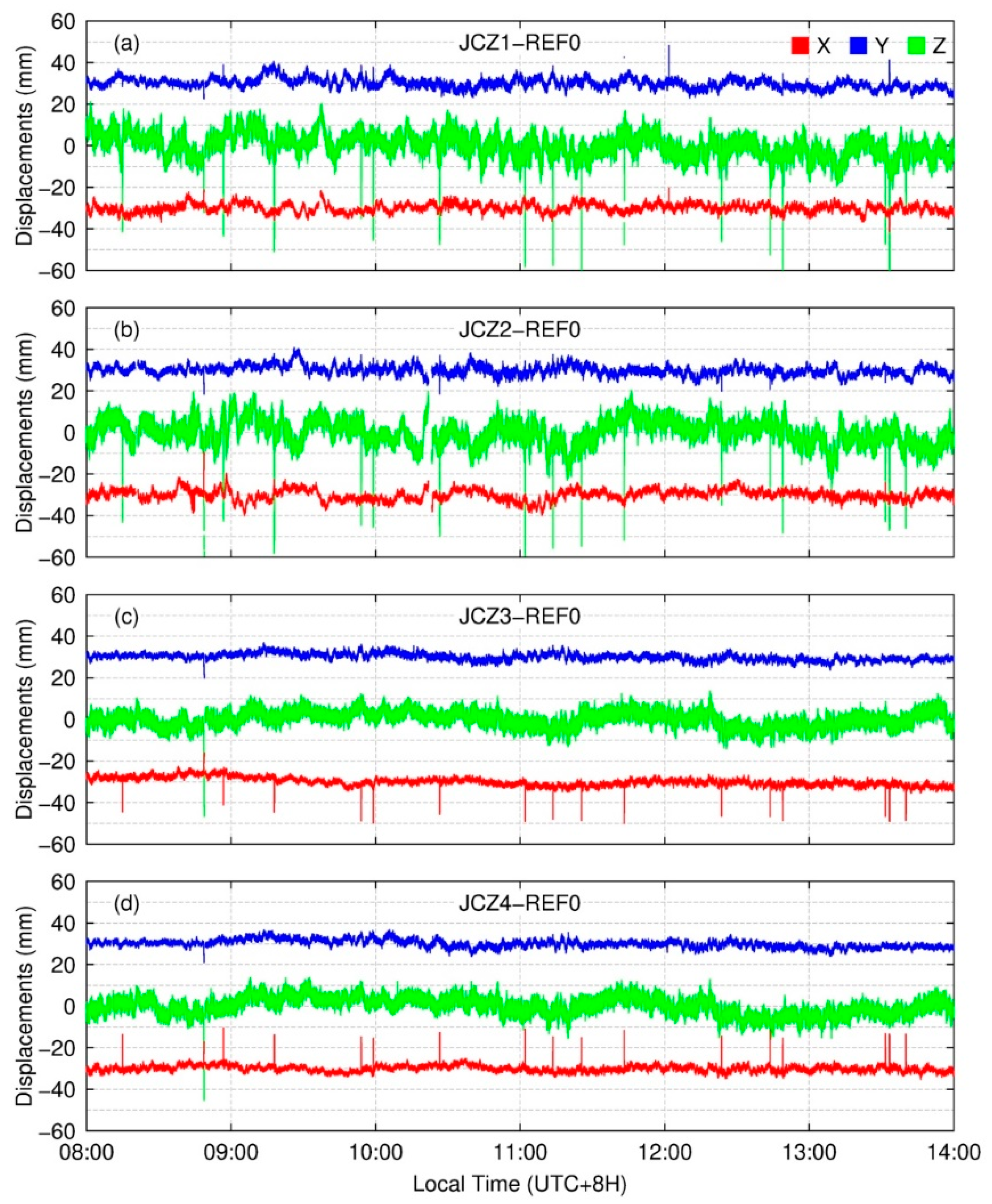
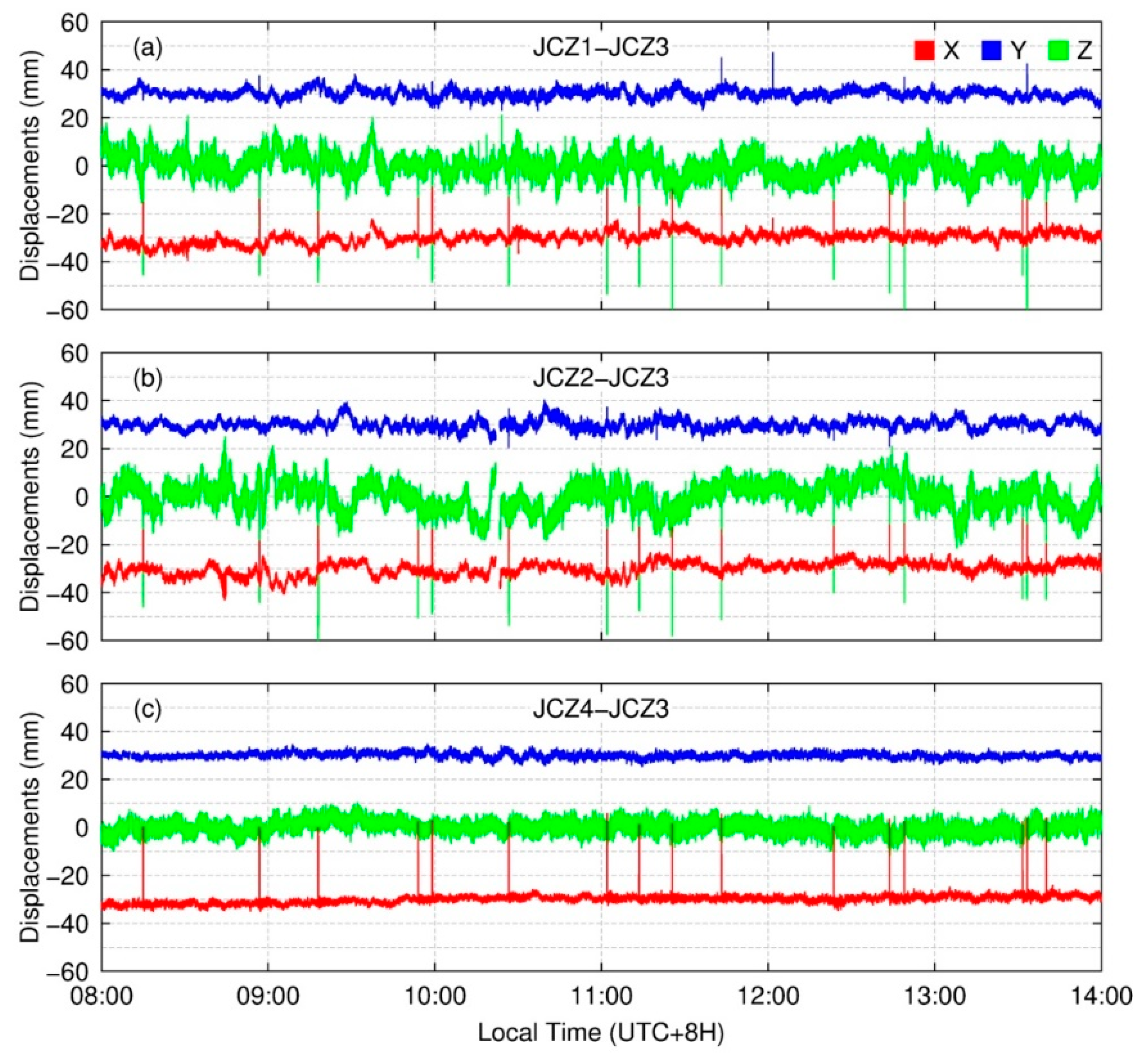
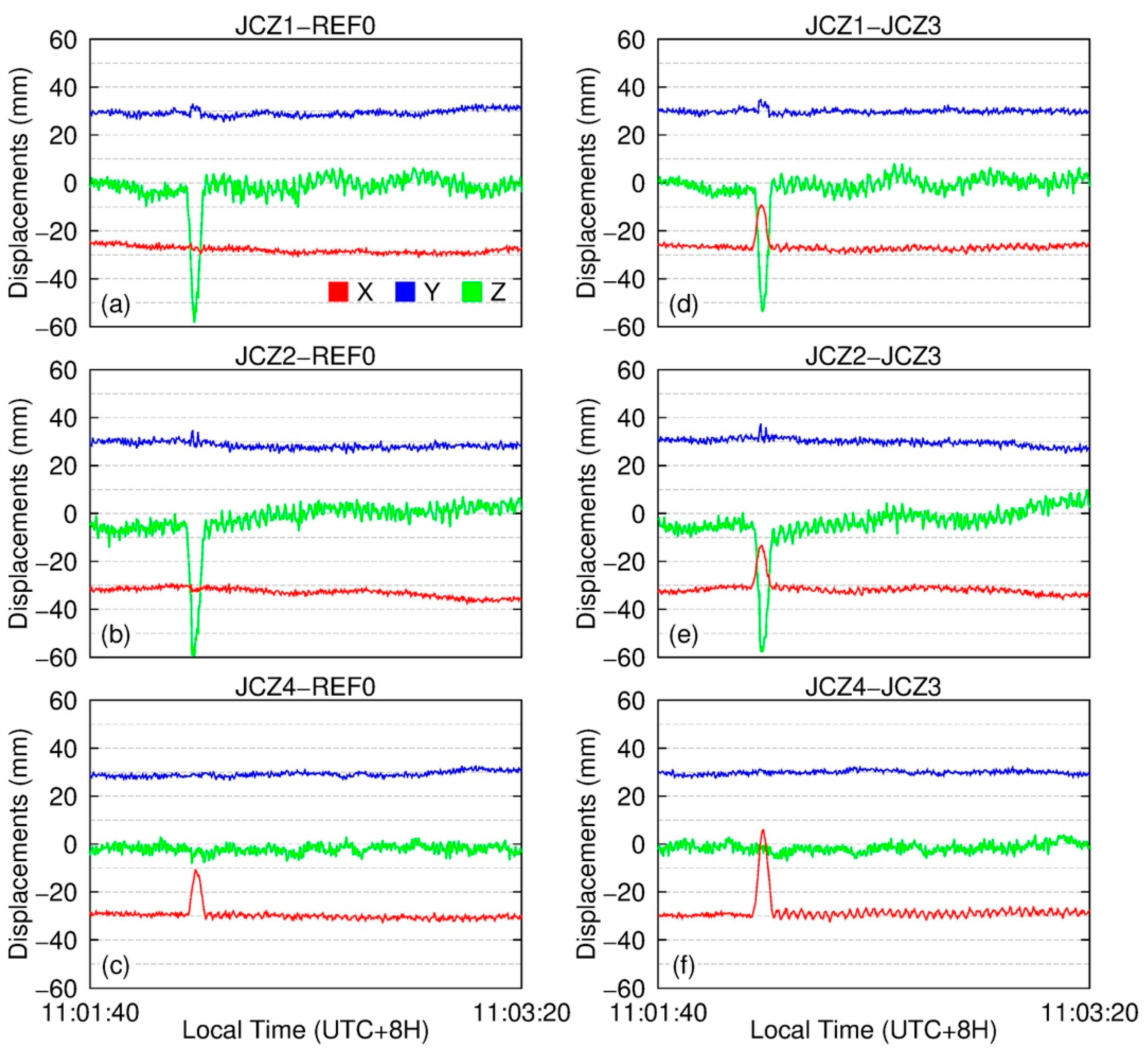
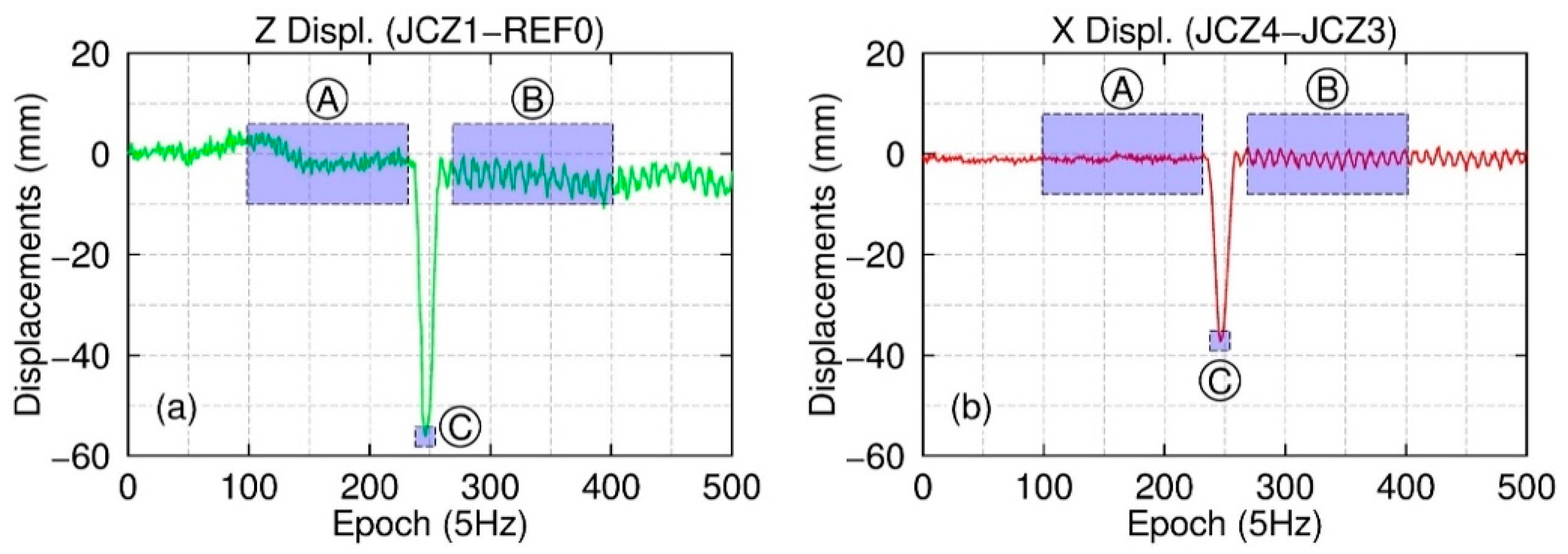
3.5. Displacement and Vibration Monitoring

4. Discussion
4.1. Displacement Estimation
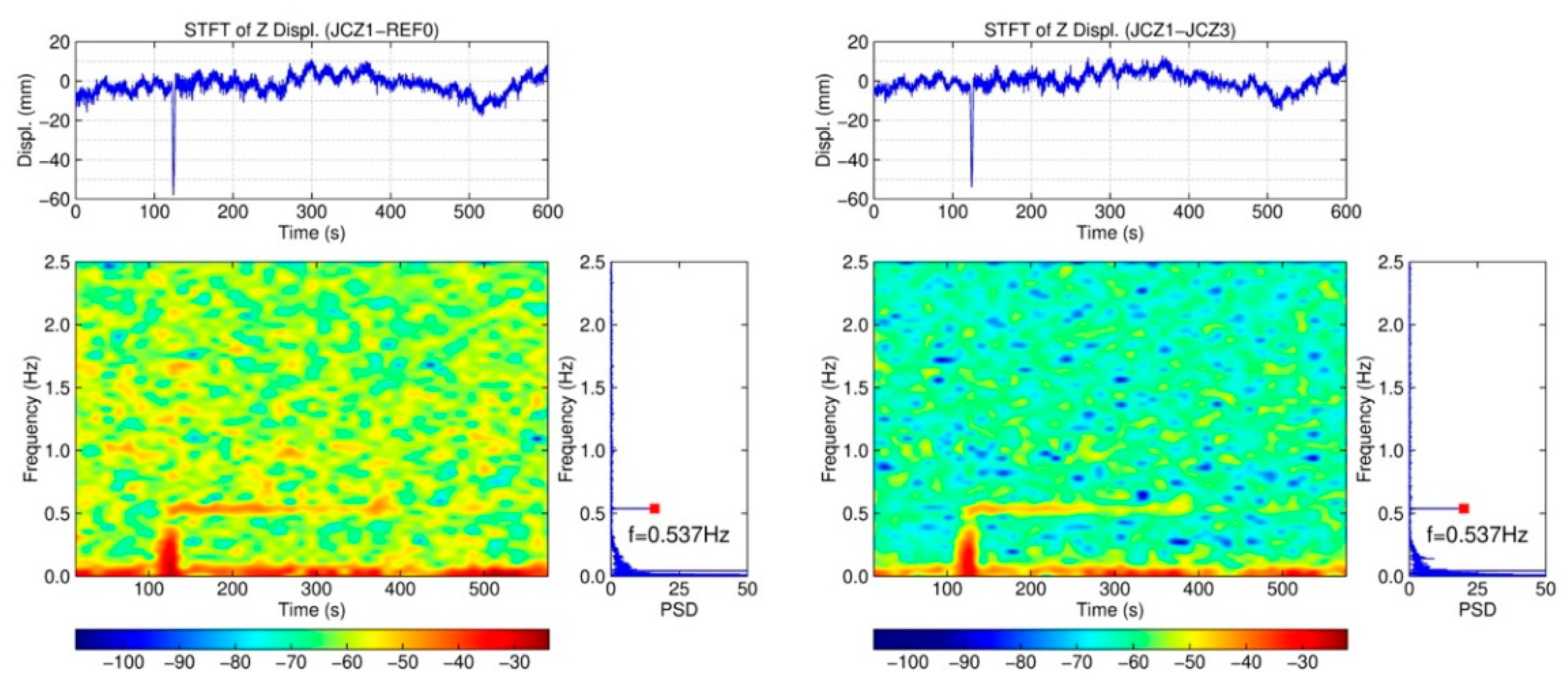
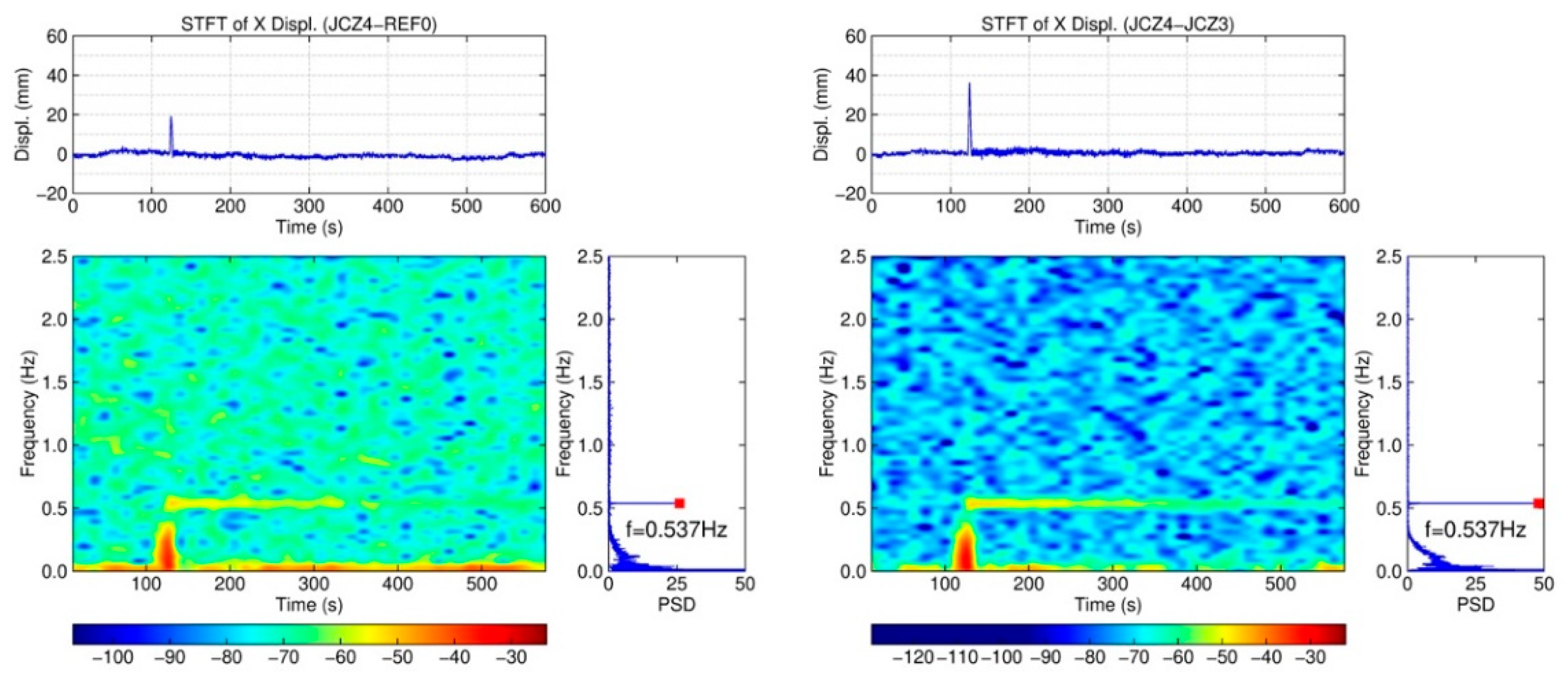
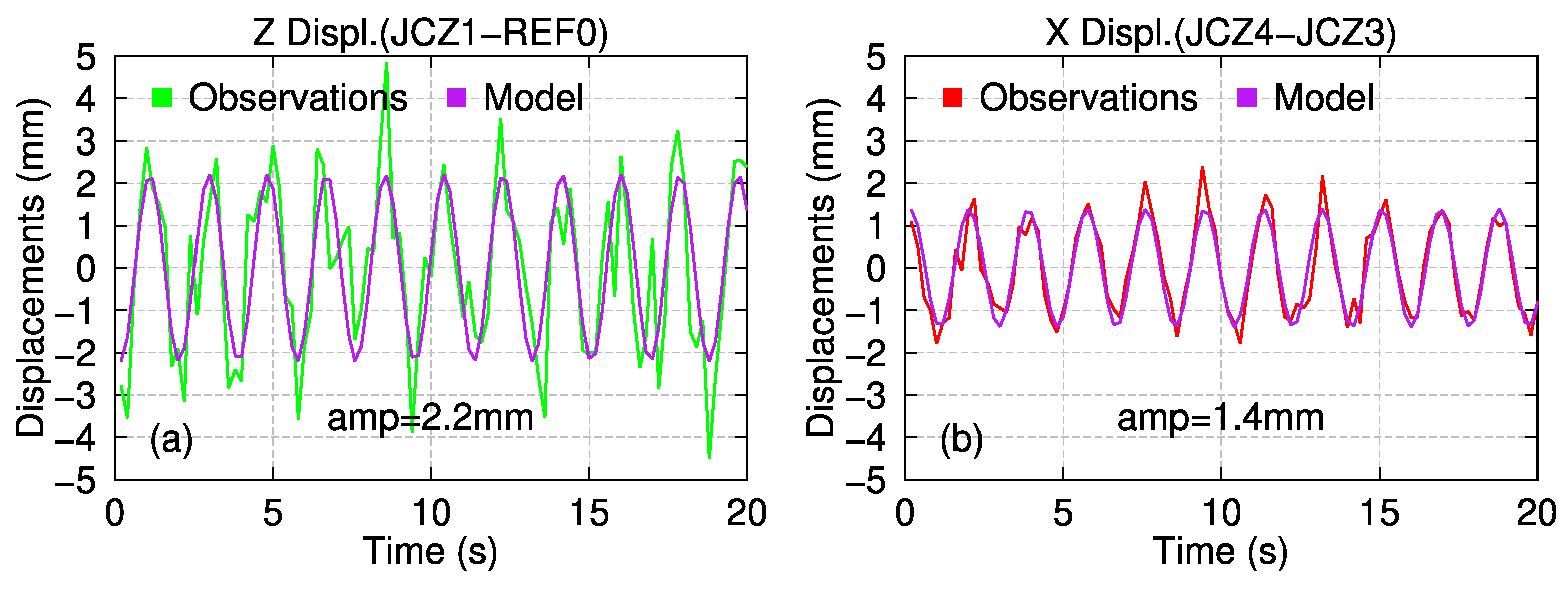
4.2. Vibration Signal Estimation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lovse, J.W.; Teskey, W.F.; Lachapelle, G.; Cannon, M.E. Dynamic Deformation Monitoring of Tall Structure Using GPS Technology. J. Surv. Eng. 1995, 121, 35–40. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.; Roberts, G.W. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Stiros, S.C. Experimental assessment of the accuracy of GPS and RTS for the determination of the parameters of oscillation of major structures. Comput. Aided Civ. Infrastruct. Eng. 2008, 23, 389–403. [Google Scholar] [CrossRef]
- Martín, A.; Anquela, A.B.; Dimas-Pagés, A.; Cos-Gayón, F. Validation of performance of real-time kinematic PPP. A possible tool for deformation monitoring. Measurement 2015, 69, 95–108. [Google Scholar] [CrossRef] [Green Version]
- Ashkenazi, V.; Dodson, A.H.; Moore, T.; Roberts, G.W. Real time OTF GPS monitoring of the Humber Bridge. Surv. World 1996, 4, 26–28. [Google Scholar]
- Ashkenazi, V.; Roberts, G.W. Experimental monitoring of the Humber Bridge using GPS. Proc. Inst. Civ. Eng.—Civ. Eng. 1997, 120, 177–182. [Google Scholar] [CrossRef]
- Guo, J.; Xu, L.; Dai, L.; Mcdonald, M.; Wu, L.; Li, Y. Application of the real-time kinematic global positioning system in bridge safety monitoring. J. Bridge Eng. 2005, 10, 163–168. [Google Scholar] [CrossRef]
- Meng, X.; Roberts, G.W.; Dodson, A.H.; Cosser, E.; Barnes, J.; Rizos, C. Impact of GPS satellite and pseudolite geometry on structural deformation monitoring: Analytical and empirical studies. J. Geod. 2004, 77, 809–822. [Google Scholar] [CrossRef]
- Han, H.; Wang, J.; Meng, X.; Liu, H. Analysis of the dynamic response of a long span bridge using GPS/accelerometer/anemometer under typhoon loading. Eng. Struct. 2016, 122, 238–250. [Google Scholar] [CrossRef]
- Yi, T.; Li, H.; Gu, M. Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Measurement 2013, 46, 420–432. [Google Scholar] [CrossRef]
- Wang, J.; Meng, X.; Qin, C.; Yi, J. Vibration frequencies extraction of the Forth road bridge using high sampling GPS data. Shock Vib. 2016, 2016, 9807861. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Yan, B.; Meng, X.; Shao, X.; Ye, H. Measurement of bridge dynamic responses using network-based real-time kinematic GNSS technique. J. Surv. Eng. 2016, 142, 04015013. [Google Scholar] [CrossRef]
- Xi, R.; Chen, H.; Meng, X.; Jiang, W.; Chen, Q. Reliable dynamic monitoring of bridges with integrated GPS and BeiDou. J. Surv. Eng. 2018, 144, 04018008. [Google Scholar] [CrossRef]
- Xi, R.; Meng, X.; Jiang, W.; An, X.; Chen, Q. GPS/GLONASS carrier phase elevation-dependent stochastic modelling estimation and its application in bridge monitoring. Adv. Space Res. 2018, 62, 2566–2585. [Google Scholar] [CrossRef]
- Meng, X.; Nguyen, D.; Xie, Y.; Owen, J.; Psimoulis, P.; Ince, S.; Chen, Q.; Ye, J.; Bhatia, P. Design and implementation of a new system for large bridge monitoring—GeoSHM. Sensors 2018, 18, 775. [Google Scholar] [CrossRef] [Green Version]
- Meng, X.; Nguyen, D.; Owen, J.; Xie, Y.; Psimoulis, P.; Ye, G. Application of GeoSHM System in Monitoring Extreme Wind Events at the Forth Road Bridge. Remote Sens. 2019, 11, 2799. [Google Scholar] [CrossRef] [Green Version]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Ge, M.; Gendt, G.; Rothacher, M.A.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geod. 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Zha, J.; Zhao, C. An efficient undifferenced method for estimating multi-GNSS high-rate clock corrections with data streams in real time. J. Geod. 2019, 93, 1435–1456. [Google Scholar] [CrossRef]
- Yigit, C.O.; El-Mowafy, A.; Dindar, A.A.; Bezcioglu, M.; Tiryakioglu, I. Investigating Performance of High-Rate GNSS-PPP and PPP-AR for Structural Health Monitoring: Dynamic Tests on Shake Table. J. Surv. Eng. 2020, 147, 1–14. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.H.; Ge, M.; Teferle, F.N. Rapid re-convergences to ambiguity-fixed solutions in precise point positioning. J. Geod. 2010, 84, 705–714. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Zhang, Q.; Li, G.; Zhang, K. Assessment of multi-frequency PPP ambiguity resolution using Galileo and BeiDou-3 signals. Remote Sens. 2021, 13, 4746. [Google Scholar] [CrossRef]
- Wübbena, G.; Schmitz, M.; Bagge, A. PPP-RTK: Precise point positioning using state-space representation in RTK networks. In Proceedings of the ION GNSS 2005, Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Teunissen, P.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X.; Ren, X.; Zuo, X.; Pan, Y. Generating GPS satellite fractional cycle bias for ambiguity-fixed precise point positioning. GPS Solut. 2016, 20, 771–782. [Google Scholar] [CrossRef]
- Li, Z.; Chen, W.; Ruan, R.; Liu, X. Evaluation of PPP-RTK based on BDS-3/BDS-2/GPS observations: A case study in Europe. GPS Solut. 2020, 24, 38. [Google Scholar] [CrossRef]
- Khodabandeh, A. Single-station PPP-RTK: Correction latency and ambiguity resolution performance. J. Geod. 2021, 95, 42–66. [Google Scholar] [CrossRef]
- Wang, P.; Liu, H.; Nie, G.; Yang, Z.; Wu, J.; Qian, C.; Shu, B. Performance evaluation of a real-time high-precision landslide displacement detection algorithm based on GNSS virtual reference station technology. Measurement 2022, 199, 111457. [Google Scholar] [CrossRef]
- Ju, B.; Jiang, W.; Tao, J.; Hu, J.; Xi, R.; Ma, J.; Liu, J. Performance evaluation of GNSS kinematic PPP and PPP-IAR in structural health monitoring of bridge: Case studies. Measurement 2022, 203, 112011. [Google Scholar] [CrossRef]
- Paziewski, J.; Wielgosz, P. Investigation of some selected strategies for multi-GNSS instantaneous RTK positioning. Adv. Space Res. 2017, 59, 12–23. [Google Scholar] [CrossRef]
- Yi, T.; Li, H.; Gu, M. Recent research and applications of GPS-based monitoring technology for high-rise structures. Struct. Control Health Monit. 2013, 20, 649–670. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Xue, C.; Psimoulis, P.; Meng, X. Feasibility analysis of the performance of low-cost GNSS receivers in monitoring dynamic motion. Measurement 2022, 202, 111819. [Google Scholar] [CrossRef]
- Janos, D.; Kuras, P.; Ortyl, Ł. Evaluation of low-cost RTK GNSS receiver in motion under demanding conditions. Measurement 2022, 201, 111647. [Google Scholar] [CrossRef]
- Wang, D.; Meng, X.; Gao, C.; Pan, S.; Chen, Q. Multipath Extraction and Mitigation for Bridge Deformation Monitoring Using a Single-Difference Model. Adv. Space Res. 2017, 60, 2882–2895. [Google Scholar] [CrossRef]
- Xi, R.; Meng, X.; Jiang, W.; An, X.; He, Q.; Chen, Q. A refined SNR based stochastic model to reduce site-dependent effects. Remote Sens. 2020, 12, 493. [Google Scholar] [CrossRef] [Green Version]
- Moschas, F.; Stiros, S. Measurement of the dynamic displacements and of the modal frequencies of a short-span pedestrian bridge using GPS and an accelerometer. Eng. Struct. 2011, 33, 10–17. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Dynamic multipath in structural bridge monitoring: An experimental approach. GPS Solut. 2014, 18, 209–218. [Google Scholar] [CrossRef]
- Gümüş, K.; Selbesoğlu, M. Evaluation of NRTK GNSS positioning methods for displacement detection by a newly designed displacement monitoring system. Measurement 2019, 142, 131–137. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The Least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Stiros, S.C.; Psimoulis, P.A. Response of a historical short-span railway bridge to passing trains: 3-D deflections and dominant frequencies derived from Robotic Total Station (RTS) measurements. Eng. Struct. 2012, 45, 362–371. [Google Scholar] [CrossRef]
- Hester, D.; Brownjohn, J.; Bocian, M.; Xu, Y. Low cost bridge load test: Calculating bridge displacement from acceleration for load assessment calculations. Eng. Struct. 2017, 143, 358–374. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models or Parameters | Strategies |
|---|---|
| Observations | The dual-frequency observations for different systems, GPS: L1/L2, BDS: B1/B2. |
| Signals and tracking modes processed | The tracking approaches for the bands are sorted in the ascending order of selecting priority, and each tracking mode is represented by one letter: GPS L1/L2: C S L X W BDS B1/B2: I Q X |
| Cutoff elevation | 10° |
| Tropospheric and ionospheric parameters | Eliminated by the double-difference method |
| Weighting scheme | Elevation-dependent model with , where presents the elevation of satellites |
| Ephemeris | BRDM combined broadcast ephemeris |
| Ambiguity resolution | LAMBDA method |
| Cycle slip detection | SD HMW and GF combination observations and DD ionosphere-free (IF) observations |
| Estimator | Kalman Filter |
| Reference Station | Fixing Base (REF0) | Moving Base (JCZ3) | ||
|---|---|---|---|---|
| Ambiguity Fixing Rate | Mean Ratio Values | Ambiguity Fixing Rate | Mean Ratio Values | |
| JCZ1 | 98.79% | 12.927 | 99.27% | 16.127 |
| JCZ2 | 98.88% | 12.962 | 98.99% | 15.300 |
| JCZ3 | 99.91% | 37.487 | - | - |
| JCZ4 | 99.93% | 35.962 | 100 | 88.085 |
| Fixing-Base Baseline | Moving-Base Baseline | Direction | RMS (mm) |
|---|---|---|---|
| JCZ1–REF0 | JCZ1–JCZ3 | Z | 2.7 |
| JCZ2–REF0 | JCZ2–JCZ3 | Z | 3.6 |
| JCZ3–REF0 | JCZ1–JCZ3 | X | 1.5 |
| JCZ3–REF0 | JCZ2–JCZ3 | X | 1.8 |
| JCZ3–REF0 | JCZ4–JCZ3 | X | 1.8 |
| JCZ4–REF0 |
| Fixing-Base Baseline | Moving-Base Baseline | Direction | RMS (mm) |
|---|---|---|---|
| JCZ1–REF0 | JCZ1–JCZ3 | Z | 1.1 |
| JCZ2–REF0 | JCZ2–JCZ3 | Z | 1.0 |
| JCZ3–REF0 | JCZ1–JCZ3 | X | - |
| JCZ3–REF0 | JCZ2–JCZ3 | X | - |
| JCZ3–REF0 | JCZ4–JCZ3 | X | - |
| JCZ4–REF0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, R.; Jiang, W.; Xuan, W.; Xu, D.; Yang, J.; He, L.; Ma, J. Performance Assessment of Structural Monitoring of a Dedicated High-Speed Railway Bridge Using a Moving-Base RTK-GNSS Method. Remote Sens. 2023, 15, 3132. https://doi.org/10.3390/rs15123132
Xi R, Jiang W, Xuan W, Xu D, Yang J, He L, Ma J. Performance Assessment of Structural Monitoring of a Dedicated High-Speed Railway Bridge Using a Moving-Base RTK-GNSS Method. Remote Sensing. 2023; 15(12):3132. https://doi.org/10.3390/rs15123132
Chicago/Turabian StyleXi, Ruijie, Weiping Jiang, Wei Xuan, Dongsheng Xu, Jian Yang, Lihua He, and Jun Ma. 2023. "Performance Assessment of Structural Monitoring of a Dedicated High-Speed Railway Bridge Using a Moving-Base RTK-GNSS Method" Remote Sensing 15, no. 12: 3132. https://doi.org/10.3390/rs15123132