
Underground Water Level Prediction in Remote Sensing Images Using Improved Hydro Index Value with Ensemble Classifier

 , , , and
, , , and
Abstract
:1. Introduction
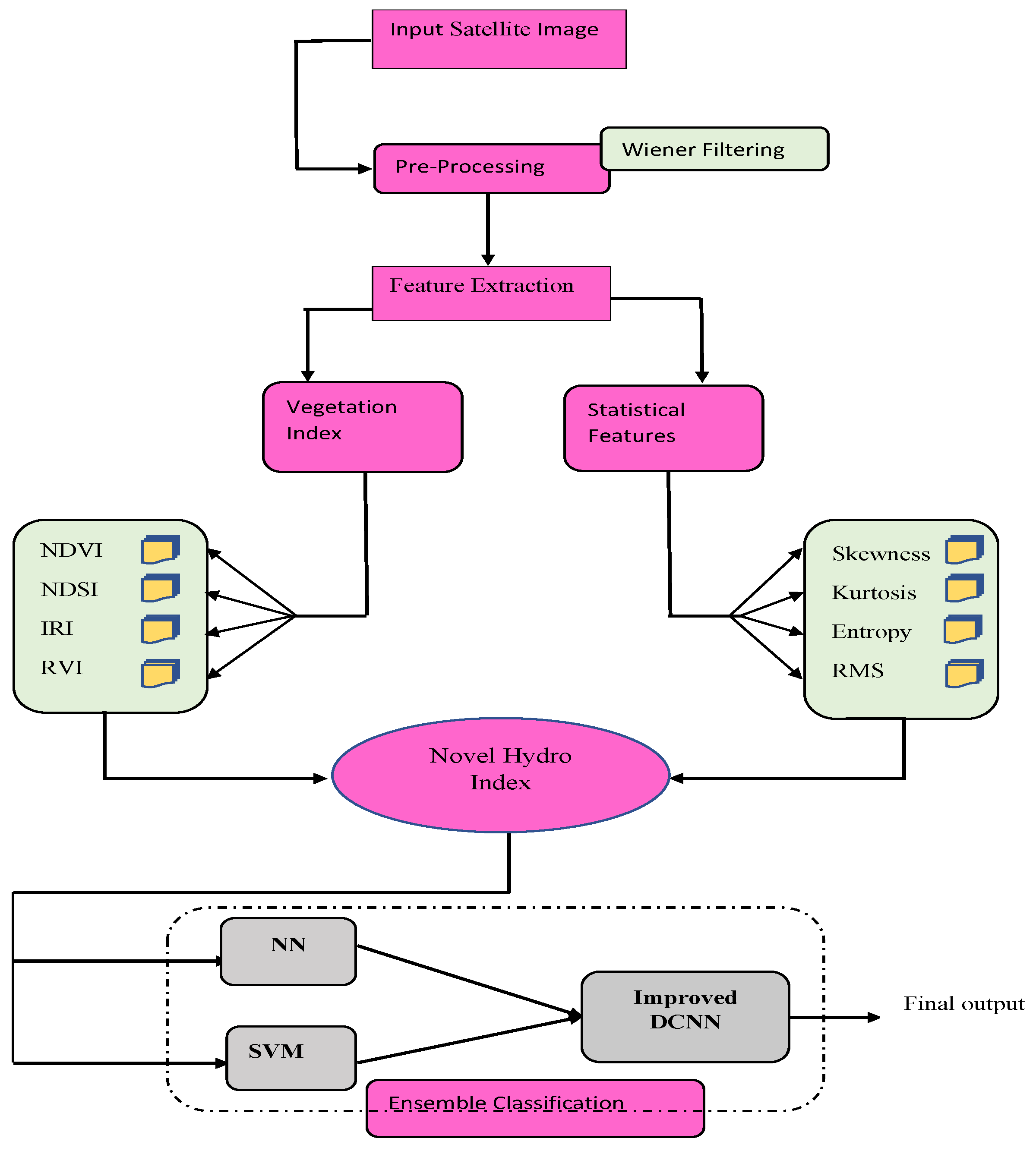
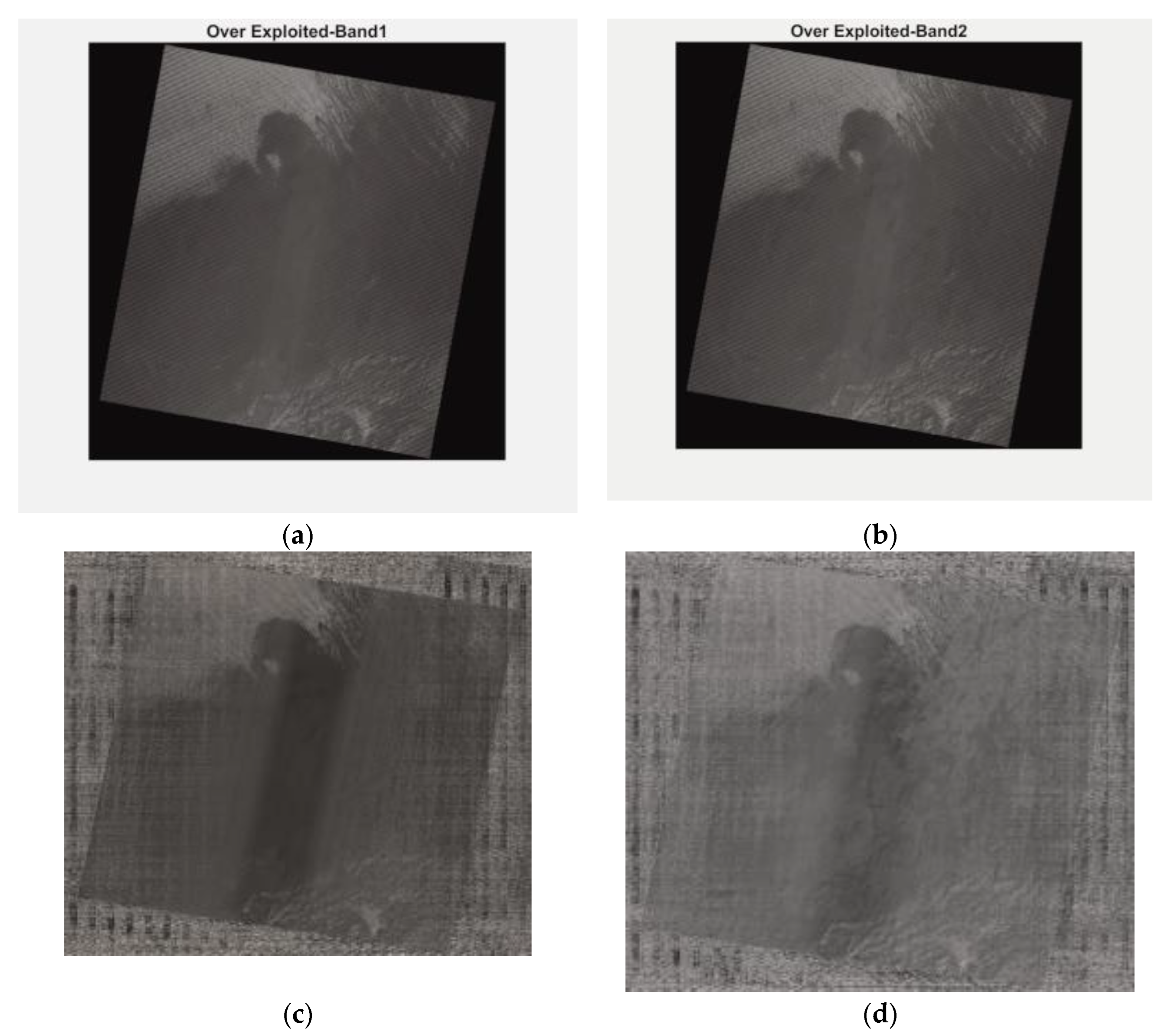
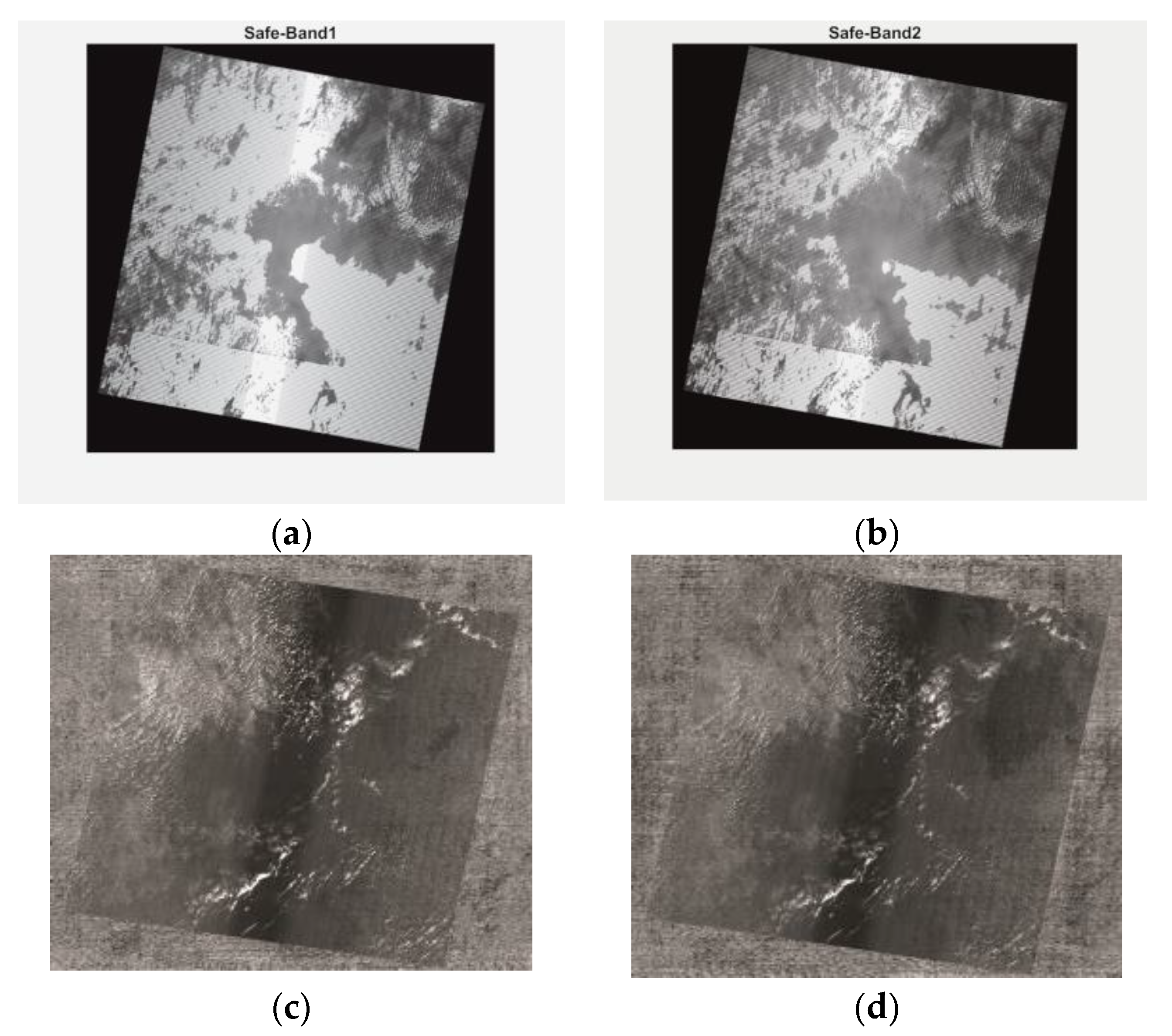
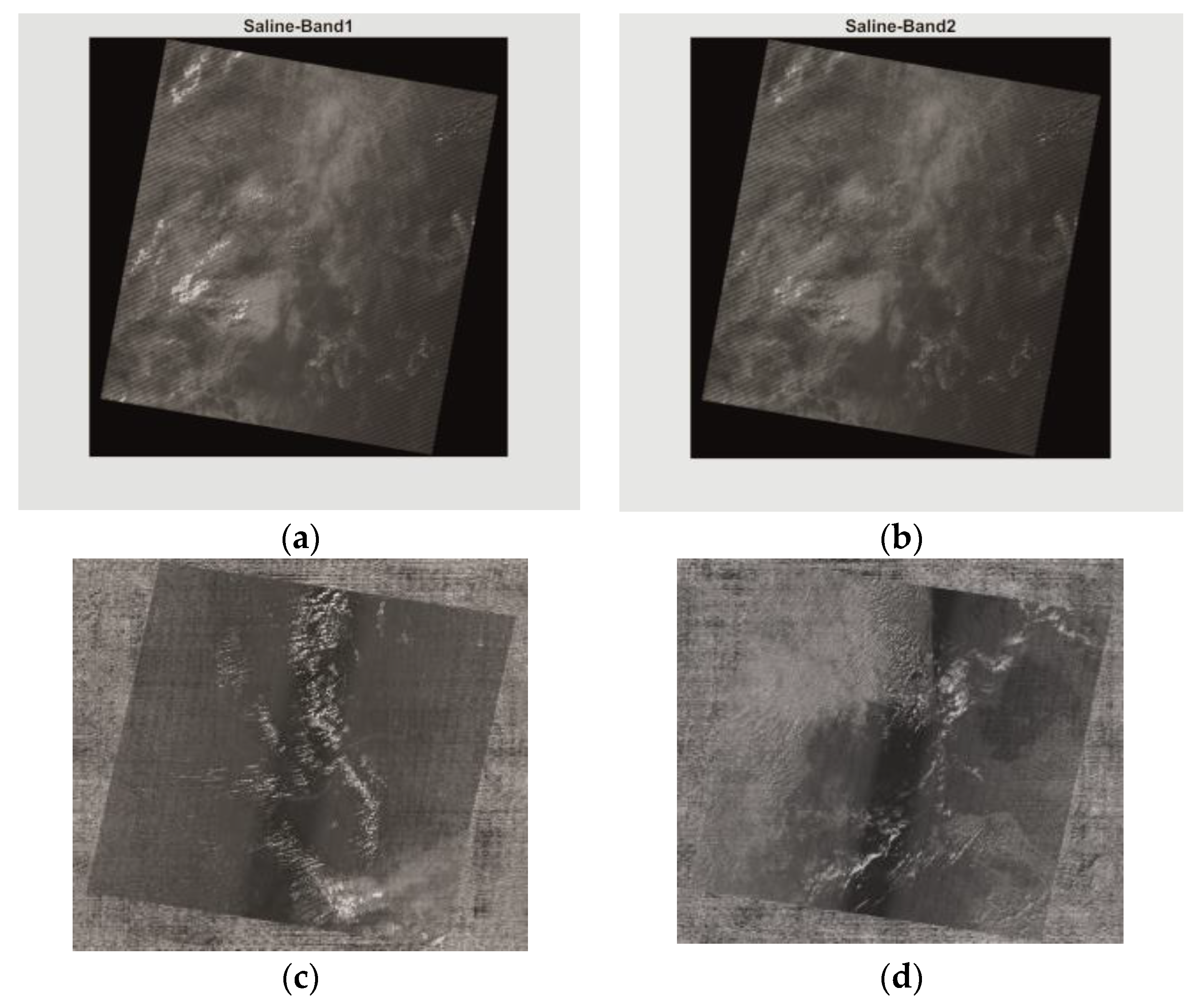
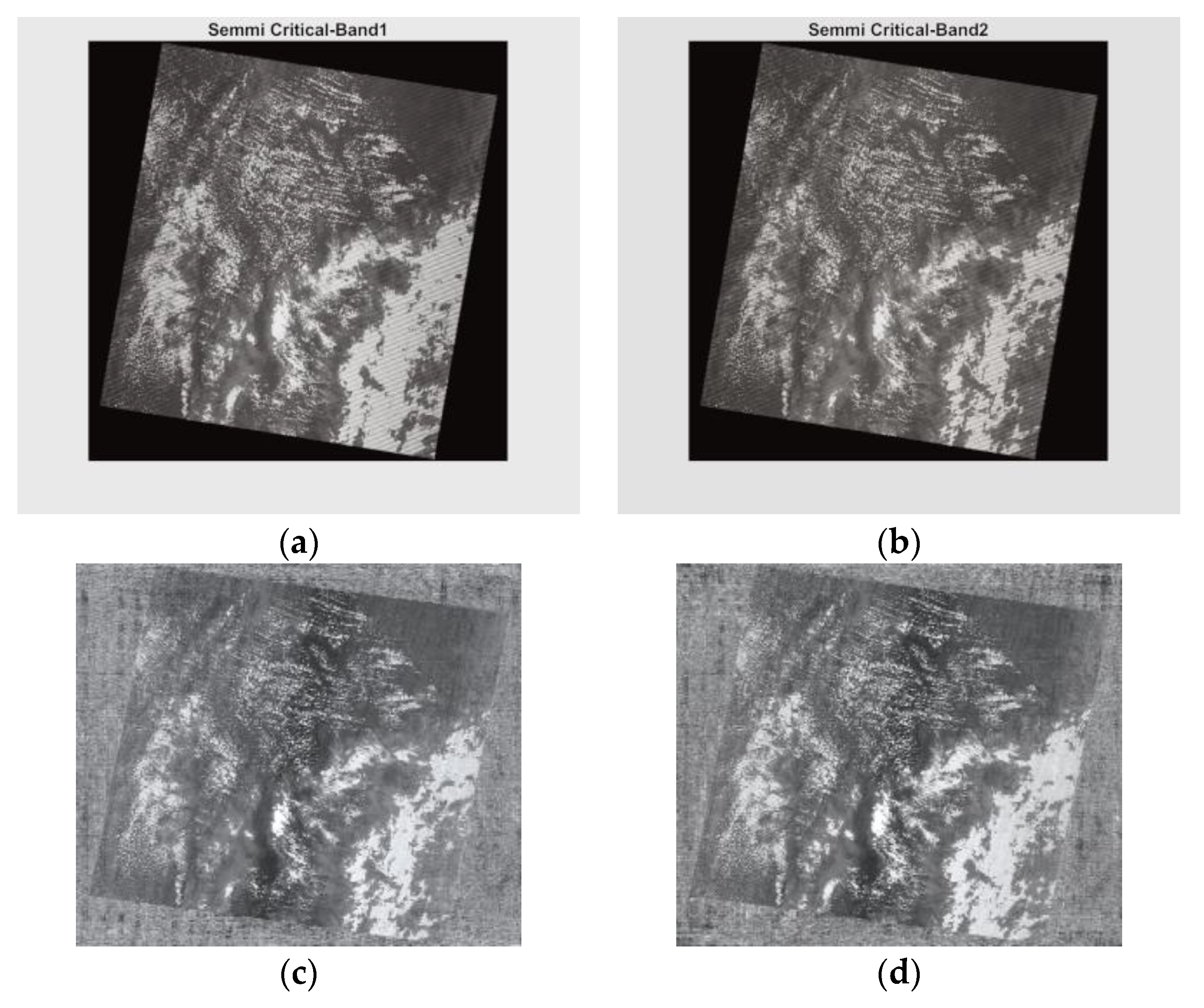
- Developed a Wiener filter for inverting the blurring and eliminating the additive noise from the acquired remote sensing images. In addition, the Wiener filter is optimal by minimizing the overall mean square error in the process of noise smoothing and inverse filtering;
- Integrated VI, NDVI, NDSI, IRI, and RVI, and statistical features for feature extraction. The extracted features are discriminative in that they decrease the sematic space between the feature subsets that help in improving the performance of underground water level prediction using remote sensing images;
- Proposed an EC model that includes improved NN, SVM, and DCNN for effective underground water level prediction.
2. Literature Review
3. Methods
3.1. Preprocessing
3.2. Extraction of Vegetation Index and Statistical Features
3.3. Underground Water Level Prediction Using Ensemble Classifier
3.3.1. Neural Network
3.3.2. Support Vector Machine
3.3.3. Improved Deep Convolutional Neural Network
4. Results and Discussion
4.1. Simulation Procedure
4.2. Location Specification
- Andhra Pradesh-Nagayalanka: 15.9455 latitude, 80.9180 longitude—Water source level range—77 sq.km.
- Tamil Nadu-Nagapattinam: 10.7672 latitude, 79.8449 longitude—Water source level range—27.83 sq.km.
- Andhra Pradesh-Kadapa-Ramapuram: 14.8080 latitude, 78.7072 longitude—Water source level range—79 sq.km.
- Madhya Pradesh-Manasa: 24.4748 latitude, 75.1404 longitude—Water source level range—48 sq.km.
- Telangana-Mahabubnagar-Maddur: 16.8602 latitude, 77.6121 longitude—Water source level range—184 sq.km.
- Andhra Pradesh-Visakhapatnam-Kotapadu: 17.8861 latitude, 83.0435 longitude—Water source level range—352 sq.km.
- Rajasthan-Jalor-Jaswantpura: 24.8019 latitude, 72.4598 longitude—Water source level range—64 sq.km.
- Rajasthan-Nagaur: 27.1983 latitude, 73.7493 longitude—Water source level range—77 sq.km.
- Karnataka-Raichur: 16.2160 latitude, 77.3566 longitude—Water source level range—83 sq.km.
- Rajasthan-Bharatpur: 27.2152 latitude, 77.5030 longitude—Water source level range—44.10 sq.km.
4.3. Performance Analysis
4.4. Statistical Analysis
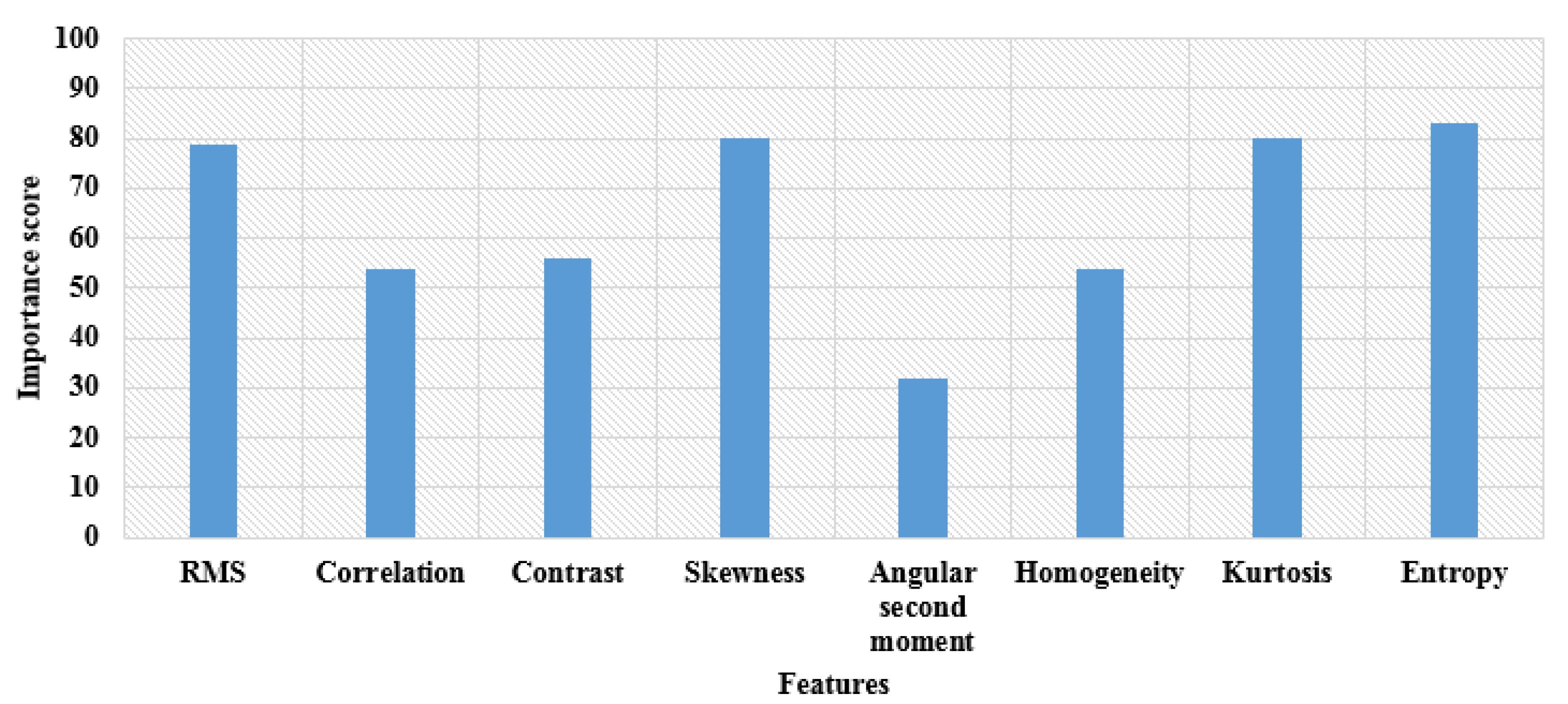
4.5. Analysis of Features on Statistical Errors
4.6. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviation | Description |
| Bi-GRU | Bidirectional Gated Recurrent Unit |
| DCNN | Deep Convolutional Neural Network |
| DL | Deep Learning |
| EC | Ensemble Classifier |
| DBN | Deep Belief Network |
| GIS | Geographic Information Systems |
| GWL | Ground Water Level |
| ConvLSTM | Convolutional Long-Short-Term Memory |
| FMF | Fuzzy Membership Function |
| EBF | Evidential Belief Function |
| HRSI | Hyper Spectral Remote Sensing Image |
| LSTM | Long Short-Term Memory |
| ROI | Region Of Interest |
| LP | Learning Percentage |
| ML | Machine Learning |
| MMSE | Minimal Mean Square Error |
| SWIR | Shorter Wave Infra Red Band |
| NIR | Normalized Infra Red Ratio |
| NN | Neural Network |
| NB | Naïve Bayes |
| LR | Logistic Regression |
| NDVI | Normalized Difference Vegetation Index |
| NDSI | Normalized Difference Snow Index |
| RVI | Radar Vegetation Index |
| IRI | Infra Red Index |
| RNN | Recurrent Neural Network |
| RMS | Root Mean Square |
| RF | Random Forest |
| TS-RF | Temporal Segmentation-Random Forest |
| SVM | Support Vector Machine |
| VI | Vegetation Index |
References
- Fathi, A.; Lee, T.; Mohebzadeh, H. Allocating Underground Dam Sites Using Remote Sensing and GIS Case Study on the Southwestern Plain of Tehran Province, Iran. J. Indian Soc. Remote Sens. 2019, 47, 989–1002. [Google Scholar] [CrossRef]
- Yan, S.; Shi, K.; Li, Y.; Liu, J.; Zhao, H. Integration of Satellite Remote Sensing Data in Underground Coal Fire Detection: A Case Study of the Fukang Region, Xinjiang, China. Front. Earth Sci. 2020, 14, 1–12. [Google Scholar] [CrossRef]
- Wang, X.; Guo, Z.; Wu, L.; Zhu, C.; He, H. Extraction of Palaeochannel Information from Remote Sensing Imagery in the East of Chaohu Lake, China. Front. Earth Sci. 2012, 6, 75–82. [Google Scholar] [CrossRef]
- Fossi, D.H.; Djomo, H.D.; Takodjou Wambo, J.D.; Kouayep Tchoundi, L.C.; Deassou Sezine, E.; Takam Tchoupe, G.B.; Tchatchueng, R. Extraction and Analysis of Structural Lineaments from Mokolo Area, North Cameroon, Using DEM and Remote Sensing Images, and Their Influence on Drainage Morphometric. Arab. J. Geosci. 2021, 14, 2062. [Google Scholar] [CrossRef]
- Guo, F.; Gao, Z. RETRACTED ARTICLE: Sponge City Plant Planning and Urban Construction Based on High-Resolution Remote Sensing Images. Arab. J. Geosci. 2021, 14, 1131. [Google Scholar] [CrossRef]
- İrdemez, Ş.; Eymirli, E.B. Determination of Spatiotemporal Changes in Erzurum Plain Wetland System Using Remote Sensing Techniques. Environ. Monit. Assess. 2021, 193, 265. [Google Scholar] [CrossRef]
- Siming, C.; Aidi, H.; Wenke, G. Remote Sensing Monitoring Method for Groundwater Level on Aeolian Desertification Area. J. Water Chem. Technol. 2020, 42, 522–529. [Google Scholar] [CrossRef]
- Zacharias, I.; Dimitriou, E.; Koussouris, T. Quantifying Land-Use Alterations and Associated Hydrologic Impacts at a Wetland Area by Using Remote Sensing and Modeling Techniques. Environ. Model. Assess. 2004, 9, 23–32. [Google Scholar] [CrossRef]
- Liu, H.; Jiang, Y.; Misa, R.; Gao, J.; Xia, M.; Preusse, A.; Sroka, A.; Jiang, Y. Ecological Environment Changes of Mining Areas around Nansi Lake with Remote Sensing Monitoring. Environ. Sci. Pollut. Res. 2021, 28, 44152–44164. [Google Scholar] [CrossRef]
- Jha, M.K.; Chowdhury, A.; Chowdary, V.M.; Peiffer, S. Groundwater Management and Development by Integrated Remote Sensing and Geographic Information Systems: Prospects and Constraints. Water Resour. Manag. 2007, 21, 427–467. [Google Scholar] [CrossRef]
- Joshi, P.K.; Kumar, M.; Midha, N.; Yanand, V.; Wal, A.P. Assessing Areas Deforested by Coal Mining Activities through Satellite Remote Sensing Images and Gis in Parts of Korba, Chattisgarh. J. Ind. Soc. Remote Sens. 2006, 34, 415–421. [Google Scholar] [CrossRef]
- Sivasankar, T.; Borah, S.B.; Das, R.; Raju, P.L.N. An Investigation on Sudden Change in Water Quality of Brahmaputra River Using Remote Sensing and GIS. Natl. Acad. Sci. Lett. 2020, 43, 619–623. [Google Scholar] [CrossRef]
- Lee, S.; Hyun, Y.; Lee, S.; Lee, M.J. Groundwater potential mapping using remote sensing and GIS-based machine learning techniques. Remote Sens. 2020, 12, 1200. [Google Scholar] [CrossRef] [Green Version]
- Collignon, B. A New Tool for the Remote Sensing of Groundwater Tables: Satellite Images of Pastoral Wells. Open Geospat. Data Softw. Stand. 2020, 5, 4. [Google Scholar] [CrossRef]
- Chowdary, V.M.; Ramakrishnan, D.; Srivastava, Y.K.; Chandran, V.; Jeyaram, A. Integrated Water Resource Development Plan for Sustainable Management of Mayurakshi Watershed, India Using Remote Sensing and GIS. Water Resour. Manag. 2009, 23, 1581–1602. [Google Scholar] [CrossRef]
- Molla, M.H.; Chowdhury, M.A.T.; Islam, A.M.Z. Spatiotemporal Change of Urban Water Bodies in Bangladesh: A Case Study of Chittagong Metropolitan City Using Remote Sensing (RS) and GIS Analytic Techniques. J. Ind. Soc. Remote Sens. 2021, 49, 773–792. [Google Scholar] [CrossRef]
- Cheng, C.; Zhang, F.; Shi, J.; Kung, H.-T. What Is the Relationship between Land Use and Surface Water Quality? A Review and Prospects from Remote Sensing Perspective. Environ. Sci. Pollut. Res. 2022, 29, 56887–56907. [Google Scholar] [CrossRef]
- El Garouani, A.; Aharik, K.; El Garouani, S. Water Balance Assessment Using Remote Sensing, Wet-Spass Model, CN-SCS, and GIS for Water Resources Management in Saïss Plain (Morocco). Arab. J. Geosci. 2020, 13, 738. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, C.; Sun, X.; Lu, J.; Zou, C.; Hou, Y.; Lu, X. Remote Sensing Reversion of Water Depths and Water Management for the Stopover Site of Siberian Cranes at Momoge, China. Wetlands 2015, 35, 369–379. [Google Scholar] [CrossRef]
- Majumdar, S.; Smith, R.; Butler, J.J.; Lakshmi, V. Groundwater Withdrawal Prediction Using Integrated Multitemporal Remote Sensing Data Sets and Machine Learning. Water Resour. Res. 2020, 56, e2020WR028059. [Google Scholar] [CrossRef]
- Sureshkumar, V.; Somarajadikshitar, R.; Beeram, B.S. A Novel Representation and Prediction Initiative for Underground Water by Using Deep Learning Technique of Remote Sensing Images. Comput. J. 2022, bxac101. [Google Scholar] [CrossRef]
- Wang, Z.; Tian, S. Ground Object Information Extraction from Hyperspectral Remote Sensing Images Using Deep Learning Algorithm. Microprocess. Microsyst. 2021, 87, 104394. [Google Scholar] [CrossRef]
- Suganthi, S.; Elango, L.; Subramanian, S.K. Groundwater potential zonation by Remote Sensing and GIS techniques and its relation to the Groundwater level in the Coastal part of the Arani and Koratalai River Basin, Southern India. Earth Sci. Res. J. 2013, 17, 87–95. [Google Scholar]
- Tao, H.; Hameed, M.M.; Marhoon, H.A.; Zounemat-Kermani, M.; Heddam, S.; Kim, S.; Sulaiman, S.O.; Tan, M.L.; Sa’adi, Z.; Mehr, A.D.; et al. Groundwater Level Prediction Using Machine Learning Models: A Comprehensive Review. Neurocomputing 2022, 489, 271–308. [Google Scholar] [CrossRef]
- Shnewer, F.M.; Hasan, A.A.; AL-Zuhairy, M.S. Groundwater Site Prediction Using Remote Sensing, GIS and Statistical Approaches: A Case Study in the Western Desert, Iraq. IJET 2018, 7, 166–173. [Google Scholar] [CrossRef]
- Zipper, S.C.; Gleeson, T.; Kerr, B.; Howard, J.K.; Rohde, M.M.; Carah, J.; Zimmerman, J. Rapid and accurate estimates of streamflow depletion caused by groundwater pumping using analytical depletion functions. Water Resources Research 2019, 55, 5807–5829. [Google Scholar] [CrossRef]
- El-Hadidy, S.M.; Morsy, S.M. Expected Spatio-Temporal Variation of Groundwater Deficit by Integrating Groundwater Modeling, Remote Sensing, and GIS Techniques. Egypt. J. Remote Sens. Space Sci. 2022, 25, 97–111. [Google Scholar] [CrossRef]
- Hussein, E.A.; Thron, C.; Ghaziasgar, M.; Bagula, A.; Vaccari, M. Groundwater Prediction Using Machine-Learning Tools. Algorithms 2020, 13, 300. [Google Scholar] [CrossRef]
- Zhang, H.; Ma, J.; Chen, C.; Tian, X. NDVI-Net: A fusion network for generating high-resolution normalized difference vegetation index in remote sensing. ISPRS J. Photogramm. Remote Sens. 2020, 168, 182–196. [Google Scholar] [CrossRef]
- Gascoin, S.; Dumont, Z.B.; Deschamps-Berger, C.; Marti, F.; Salgues, G.; López-Moreno, J.I.; Revuelto, J.; Michon, T.; Schattan, P.; Hagolle, O. Estimating fractional snow cover in open terrain from sentinel-2 using the normalized difference snow index. Remote Sens. 2020, 12, 2904. [Google Scholar] [CrossRef]
- Gonenc, A.; Ozerdem, M.S.; Acar, E. Comparison of NDVI and RVI Vegetation Indices Using Satellite Images. In Proceedings of the 2019 8th International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Istanbul, Turkey, 16–19 July 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Kim, Y.; van Zyl, J.J. A Time-Series Approach to Estimate Soil Moisture Using Polarimetric Radar Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2519–2527. [Google Scholar] [CrossRef]
- Koppe, W.; Gnyp, M.L.; Hütt, C.; Yao, Y.; Miao, Y.; Chen, X.; Bareth, G. Rice Monitoring with Multi-Temporal and Dual-Polarimetric TerraSAR-X Data. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 568–576. [Google Scholar] [CrossRef]
- Wen, Q.; Liu, H.; Zhang, Z. A method of generating multivariate non-normal random numbers with desired multivariate skewness and kurtosis. Behav. Res. Methods 2020, 52, 939–946. [Google Scholar]
- Martin, C.; Aleem, S.H.A.; Zobaa, A.F. On the root mean square error (RMSE) calculation for parameter estimation of photovoltaic models: A novel exact analytical solution based on Lambert W function. Energy Convers. Manag. 2020, 210, 112716. [Google Scholar]
- Gawali, S. Shape of Data: Skewness and Kurtosis. 2021. Available online: https://www.analyticsvidhya.com/blog/2021/05/shape-of-data-skewness-and-kurtosis/ (accessed on 5 September 2022).
- Yan, H.; Deng, H. An improved belief entropy in evidence theory. IEEE Access 2020, 8, 57505–57516. [Google Scholar] [CrossRef]
- Mohan, Y.; Chee, S.S.; Xin, D.K.P.; Foong, L.P. Artificial Neural Network for Classification of Depressive and Normal in EEG. In Proceedings of the 2016 IEEE EMBS Conference on Biomedical Engineering and Sciences (IECBES), Kuala Lumpur, Malaysia, 4–8 December 2016; pp. 286–290. [Google Scholar] [CrossRef]
- Avci, E. A New Intelligent Diagnosis System for the Heart Valve Diseases by Using Genetic-SVM Classifier. Expert Syst. Appl. 2009, 36, 10618–10626. [Google Scholar] [CrossRef]
- Gu, J.; Wang, Z.; Kuen, J.; Ma, L.; Shahroudy, A.; Shuai, B.; Liu, T.; Wang, X.; Wang, G.; Cai, J.; et al. Recent Advances in Convolutional Neural Networks. Pattern Recognit. 2018, 77, 354–377. [Google Scholar] [CrossRef] [Green Version]
- Rohde, M.M.; Biswas, T.; Housman, I.W.; Campbell, L.S.; Klausmeyer, K.R.; Howard, J.K. A Machine Learning Approach to Predict Groundwater Levels in California Reveals Ecosystems at Risk. Front. Earth Sci. 2021, 9, 784499. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LSTM | NB | RF | RNN | BI-GRU | EC [28] | ML [20] | DL [21] | CNN [22] | TS + RF [41] | EC (NN, SVM, DCNN) | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F-measure | 0.915 | 0.927 | 0.940 | 0.908 | 0.914 | 0.909 | 0.717 | 0.846 | 0.623 | 0.927 | 0.957 |
| FPR | 0.332 | 0.283 | 0.229 | 0.003 | 0.337 | 0 | 0.435 | 0.524 | 0.576 | 0.283 | 0.008 |
| Specificity | 0.667 | 0.716 | 0.770 | 0.996 | 0.662 | 1 | 0.717 | 0.762 | 0.788 | 0.716 | 0.929 |
| Precision | 0.845 | 0.865 | 0.888 | 0.997 | 0.843 | 1 | 0.435 | 0.524 | 0.576 | 0.865 | 0.920 |
| Accuracy | 0.881 | 0.898 | 0.917 | 0.891 | 0.878 | 0.892 | 0.435 | 0.524 | 0.576 | 0.898 | 0.928 |
| MCC | 0.747 | 0.784 | 0.824 | 0.796 | 0.742 | 0.798 | 0.152 | 0.286 | 0.364 | 0.784 | 0.928 |
| NPV | 0.994 | 0.995 | 0.995 | 0.766 | 0.992 | 0.766 | 0.717 | 0.762 | 0.788 | 0.995 | 1 |
| Sensitivity | 0.998 | 0.998 | 0.998 | 0.834 | 0.997 | 0.833 | 0.282 | 0.237 | 0.211 | 0.998 | 0.925 |
| FNR | 0.001 | 0.001 | 0.001 | 0.165 | 0.002 | 0.166 | 0.564 | 0.475 | 0.423 | 0.001 | 0 |
| Models | Error Deviation | Minimum Error | Mean Error | Maximum Error | Error Median |
|---|---|---|---|---|---|
| EC | 0.008 | 0.059 | 0.067 | 0.080 | 0.065 |
| LSTM | 0.033 | 0.090 | 0.114 | 0.172 | 0.098 |
| NB | 0.023 | 0.092 | 0.121 | 0.156 | 0.119 |
| RF | 0.027 | 0.134 | 0.157 | 0.201 | 0.148 |
| RNN | 0.036 | 0.163 | 0.127 | 0.231 | 0.140 |
| Bi-GRU | 0.025 | 0.102 | 0.133 | 0.162 | 0.133 |
| ML [20] | 0.122 | 0.187 | 0.160 | 0.165 | 0.023 |
| DL [21] | 0.119 | 0.153 | 0.134 | 0.132 | 0.012 |
| CNN [22] | 0.124 | 0.187 | 0.151 | 0.147 | 0.022 |
| EC without Statistical Feature | EC without Novel Hydro Index | EC without Feature Extraction | Proposed EC | |
|---|---|---|---|---|
| MCC | 0.009 | 0.013 | 0.003 | 0.928 |
| NPV | 0.073 | 0.100 | 0.146 | 0.851 |
| Specificity | 0.046 | 0.044 | 0.051 | 0.929 |
| FNR | 0.053 | 0.054 | 0.053 | 0.021 |
| F-measure | 0.930 | 0.911 | 0.894 | 0.957 |
| Accuracy | 0.870 | 0.838 | 0.810 | 0.928 |
| Sensitivity | 0.946 | 0.945 | 0.946 | 0.925 |
| FPR | 0.953 | 0.955 | 0.948 | 0.008 |
| Precision | 0.915 | 0.880 | 0.847 | 0.920 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stateczny, A.; Narahari, S.C.; Vurubindi, P.; Guptha, N.S.; Srinivas, K. Underground Water Level Prediction in Remote Sensing Images Using Improved Hydro Index Value with Ensemble Classifier. Remote Sens. 2023, 15, 2015. https://doi.org/10.3390/rs15082015
Stateczny A, Narahari SC, Vurubindi P, Guptha NS, Srinivas K. Underground Water Level Prediction in Remote Sensing Images Using Improved Hydro Index Value with Ensemble Classifier. Remote Sensing. 2023; 15(8):2015. https://doi.org/10.3390/rs15082015
Chicago/Turabian StyleStateczny, Andrzej, Sujatha Canavoy Narahari, Padmavathi Vurubindi, Nirmala S. Guptha, and Kalyanapu Srinivas. 2023. "Underground Water Level Prediction in Remote Sensing Images Using Improved Hydro Index Value with Ensemble Classifier" Remote Sensing 15, no. 8: 2015. https://doi.org/10.3390/rs15082015