
Retrieval of Aerosol Microphysical Properties from Multi-Wavelength Mie–Raman Lidar Using Maximum Likelihood Estimation: Algorithm, Performance, and Application


Abstract
:1. Introduction
2. BOREAL Algorithm
2.1. Modeling the Problem
2.2. Optimization Procedure
- ,
- the number of iteration u reaches the prescribed maximum value, and the iteration will stop if either of the above conditions is met. Condition 1 is based on the statistical principle. Since we have assumed each conforms to a Gaussian distribution, conforms to a chi-square distribution with a degree of freedom (DOF) of p–q. A ‘good’ fit is derived if the ratio of and DOF is just not greater than 1 [53].
2.3. The Selection of Individual Solutions
- Select the individual solutions with fitting errors less than the prescribed measurement error (10% for all the measurement channels in this study);
- Among the selected individual solutions, select those whose elements of v meet either of the following inequalities:where means the maximum retrieved element in v, and the multiple factors are empirically chosen.
- Among the selected individual solutions, select those whose standard deviations of the VSD are greater than 0.35. This criterion is based on the study of Tanré et al. [58]. The standard deviation of a distribution v (lnr) is calculated by:where
2.4. Propagation of Measurement Error
3. Sensitivity Study
3.1. Data Preparation and Initialization
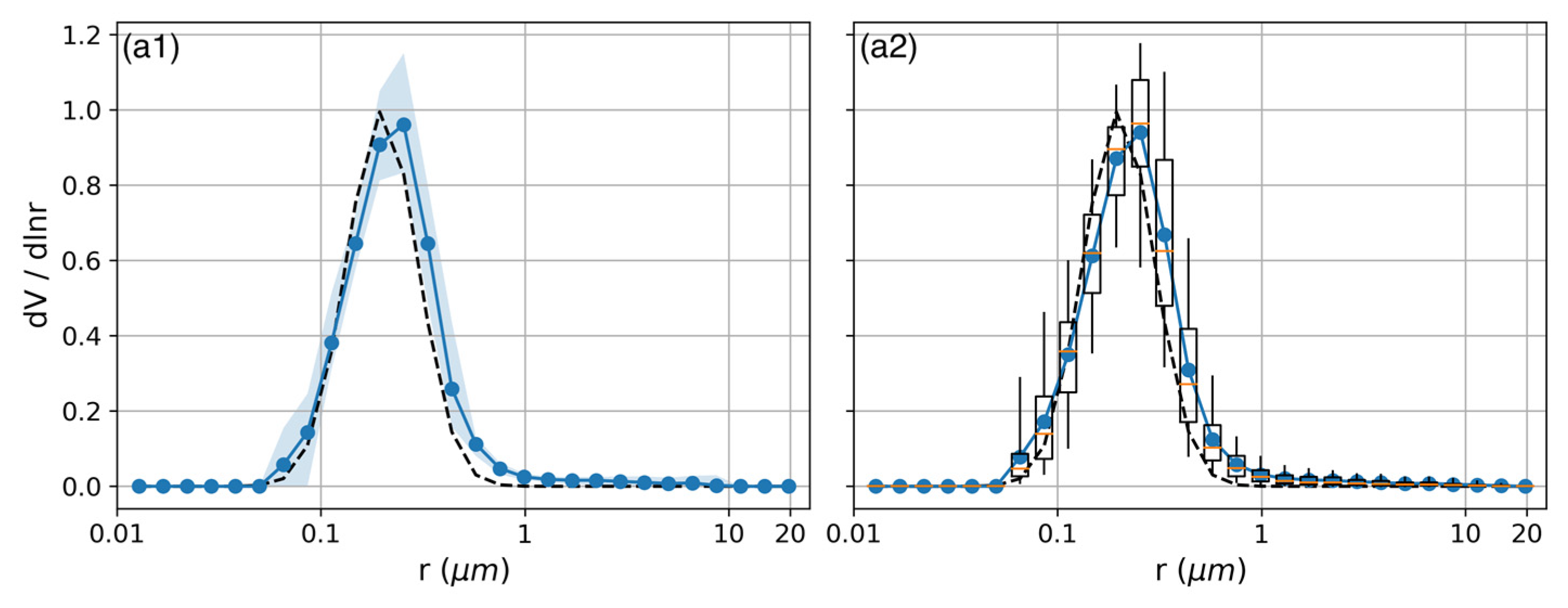
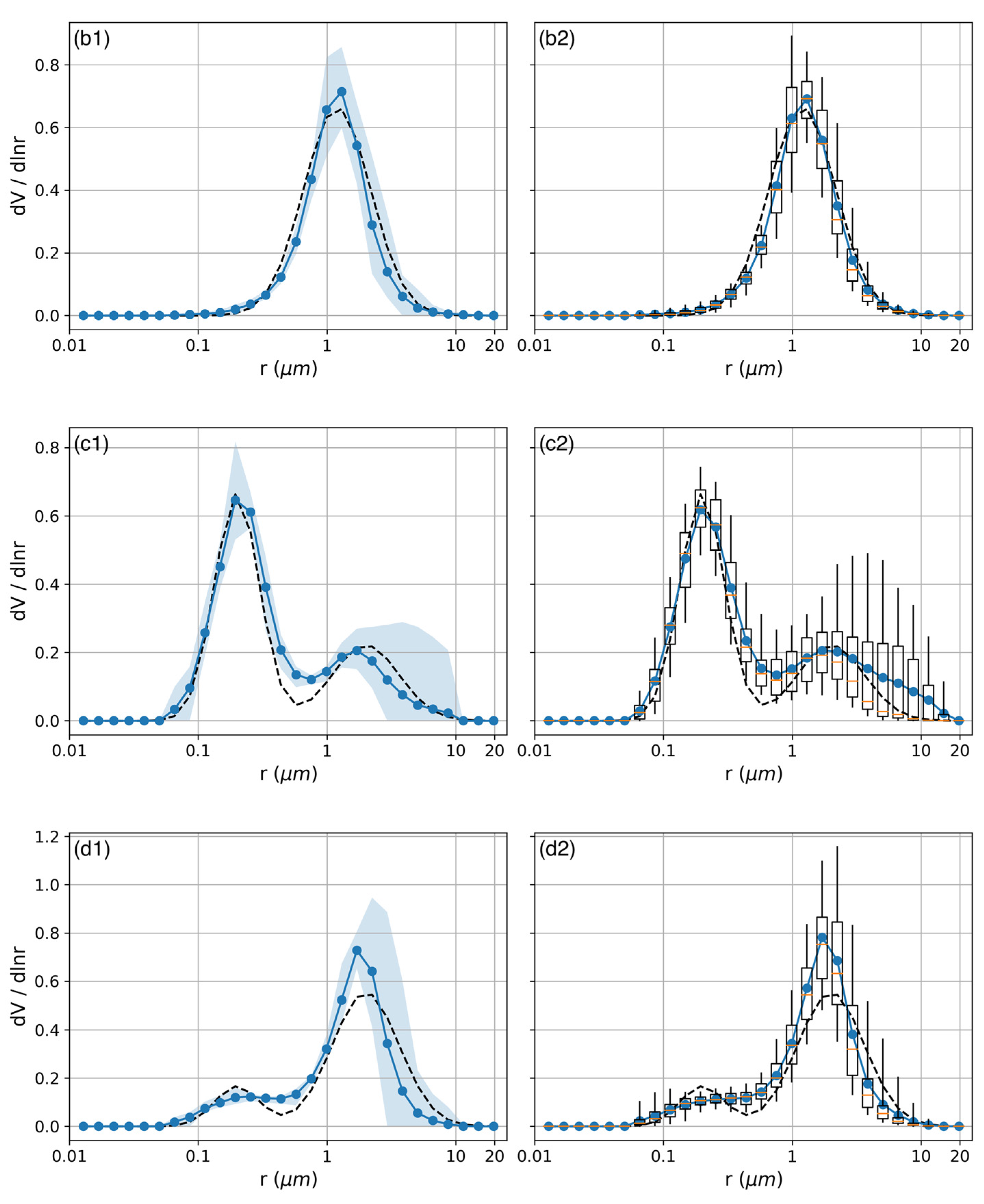
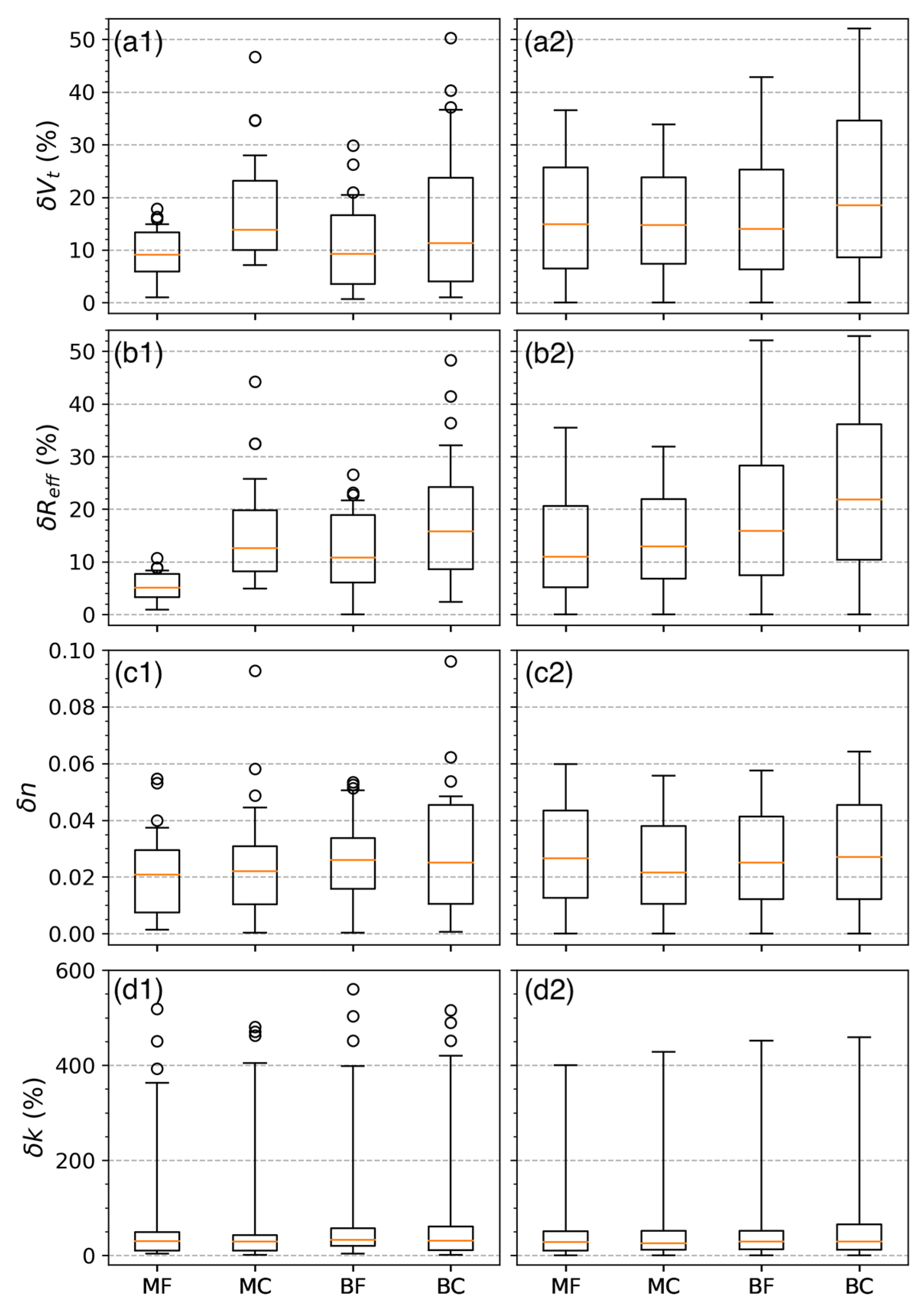
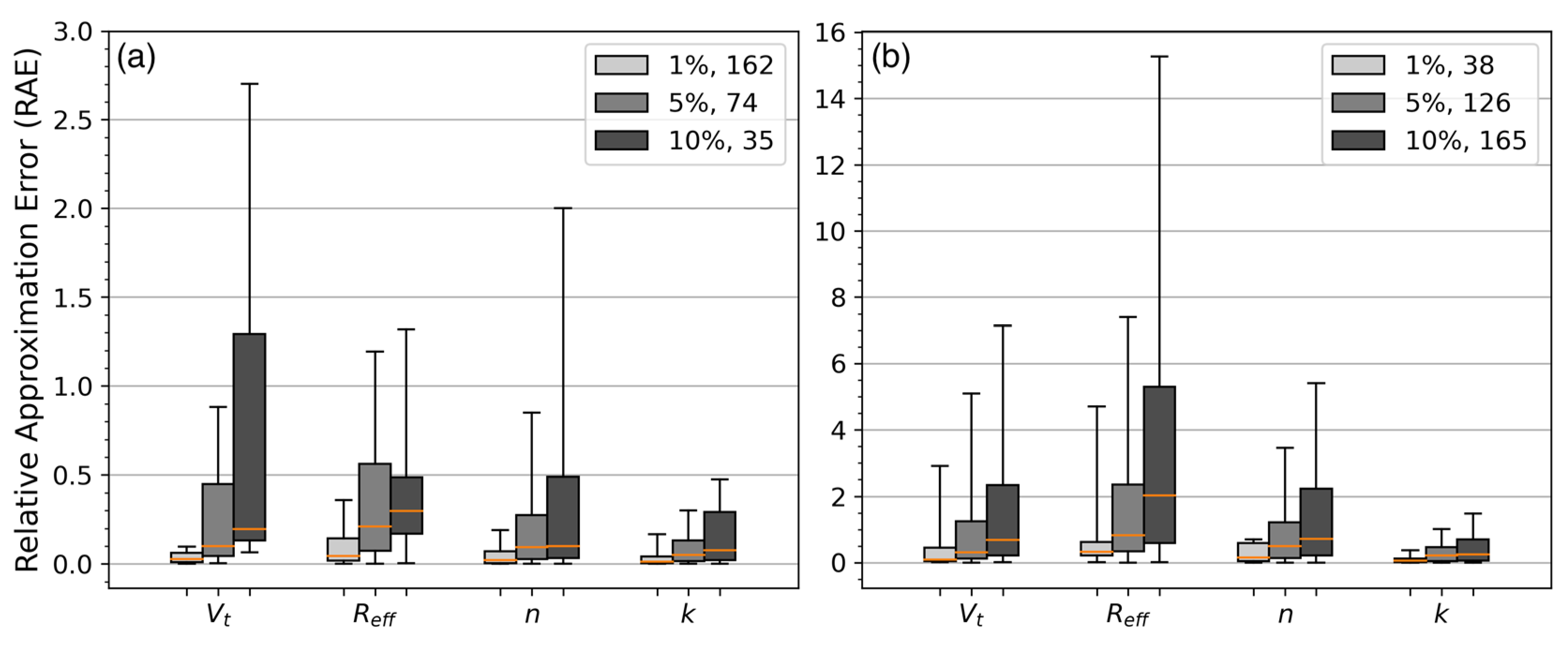
3.2. Evaluation of Retrieval Accuracy
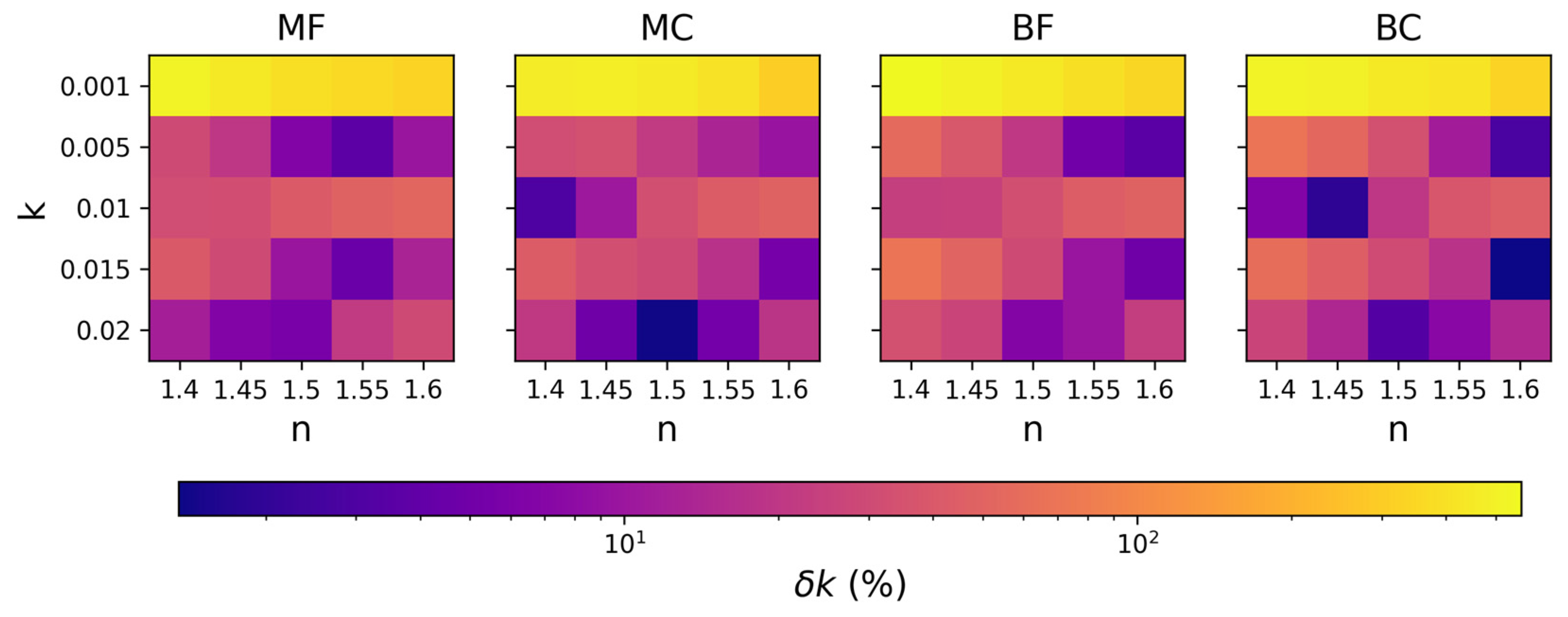
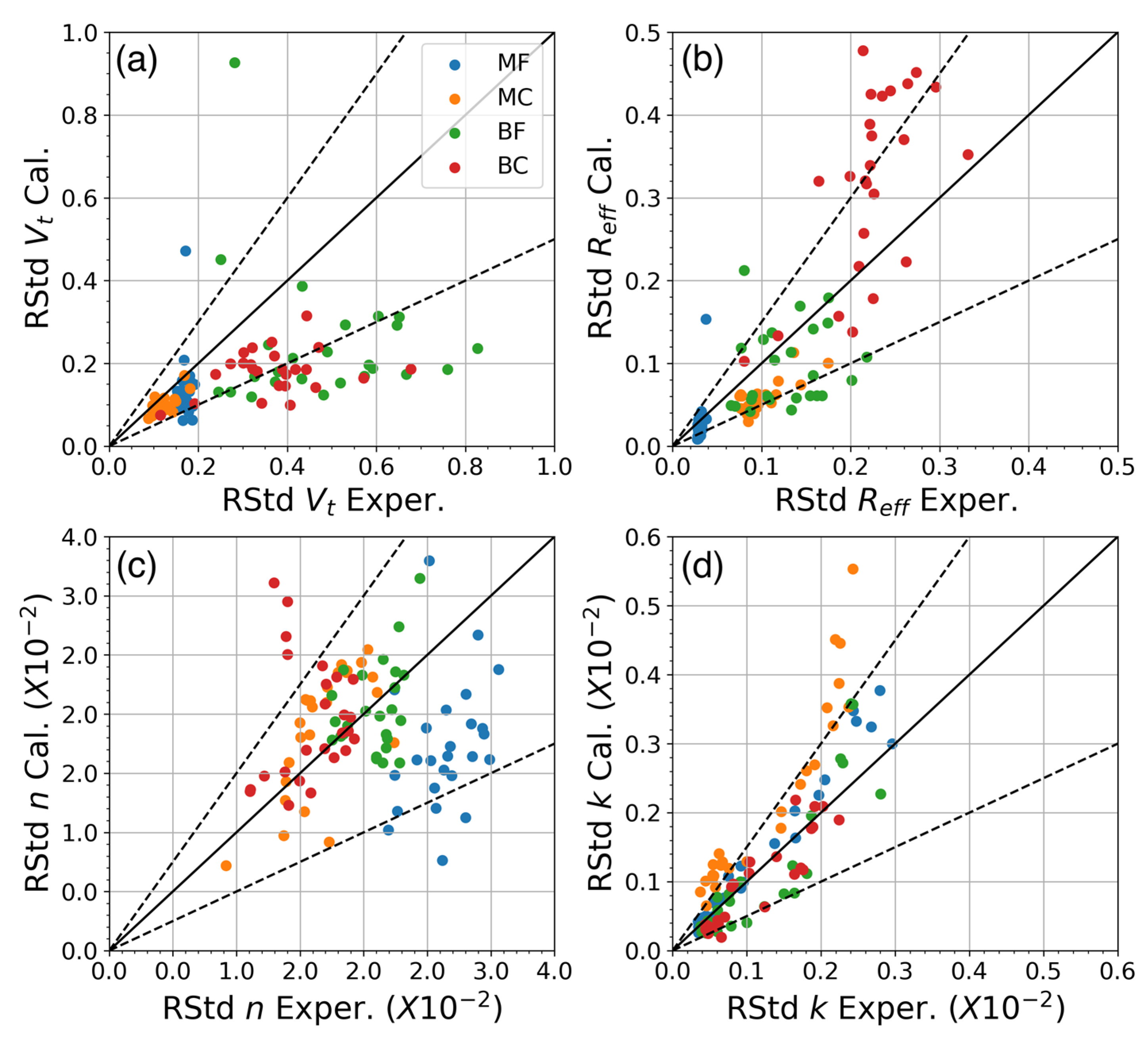
3.3. Evaluation of the Error Propagation Model
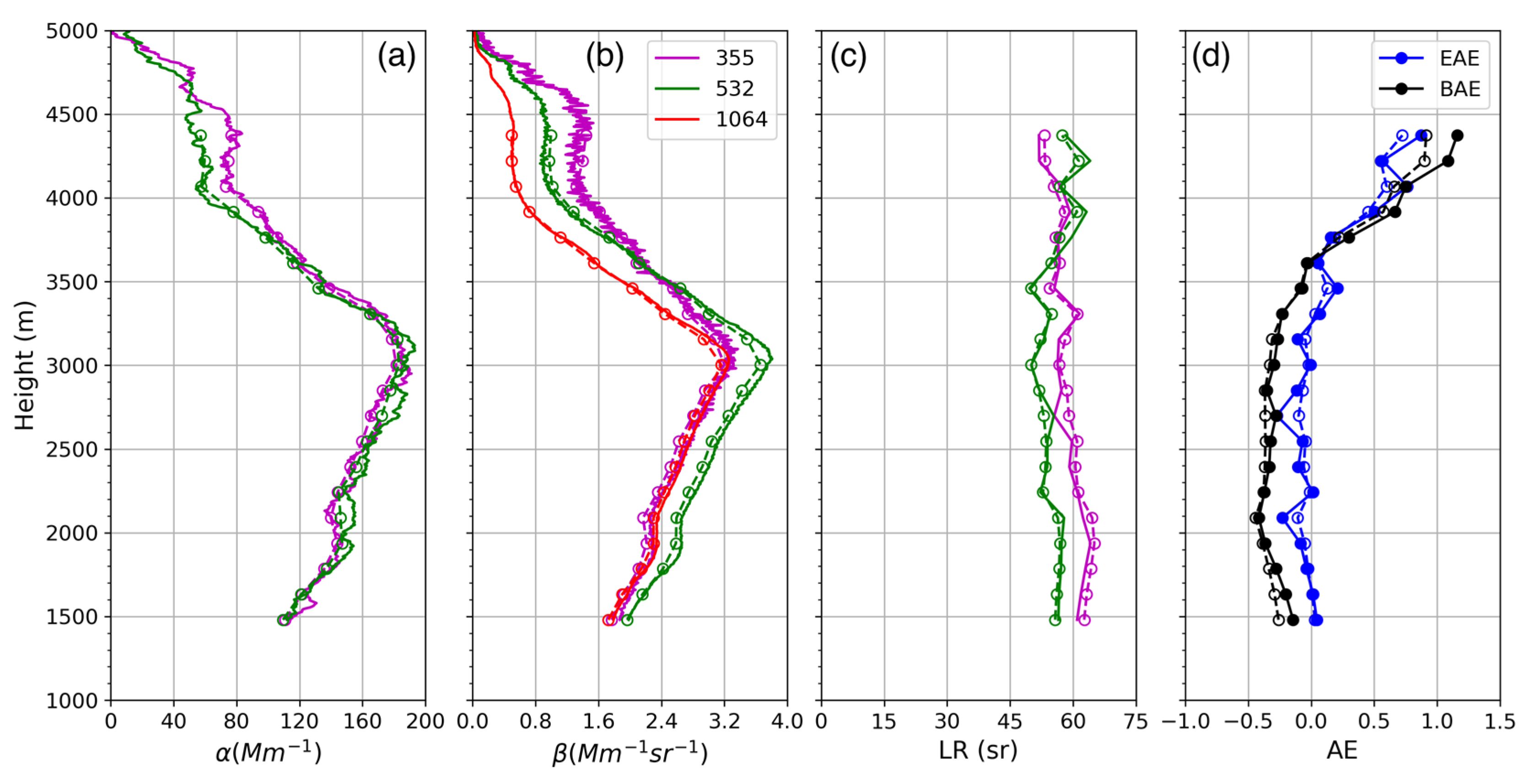
4. Application to Real Lidar Measurements
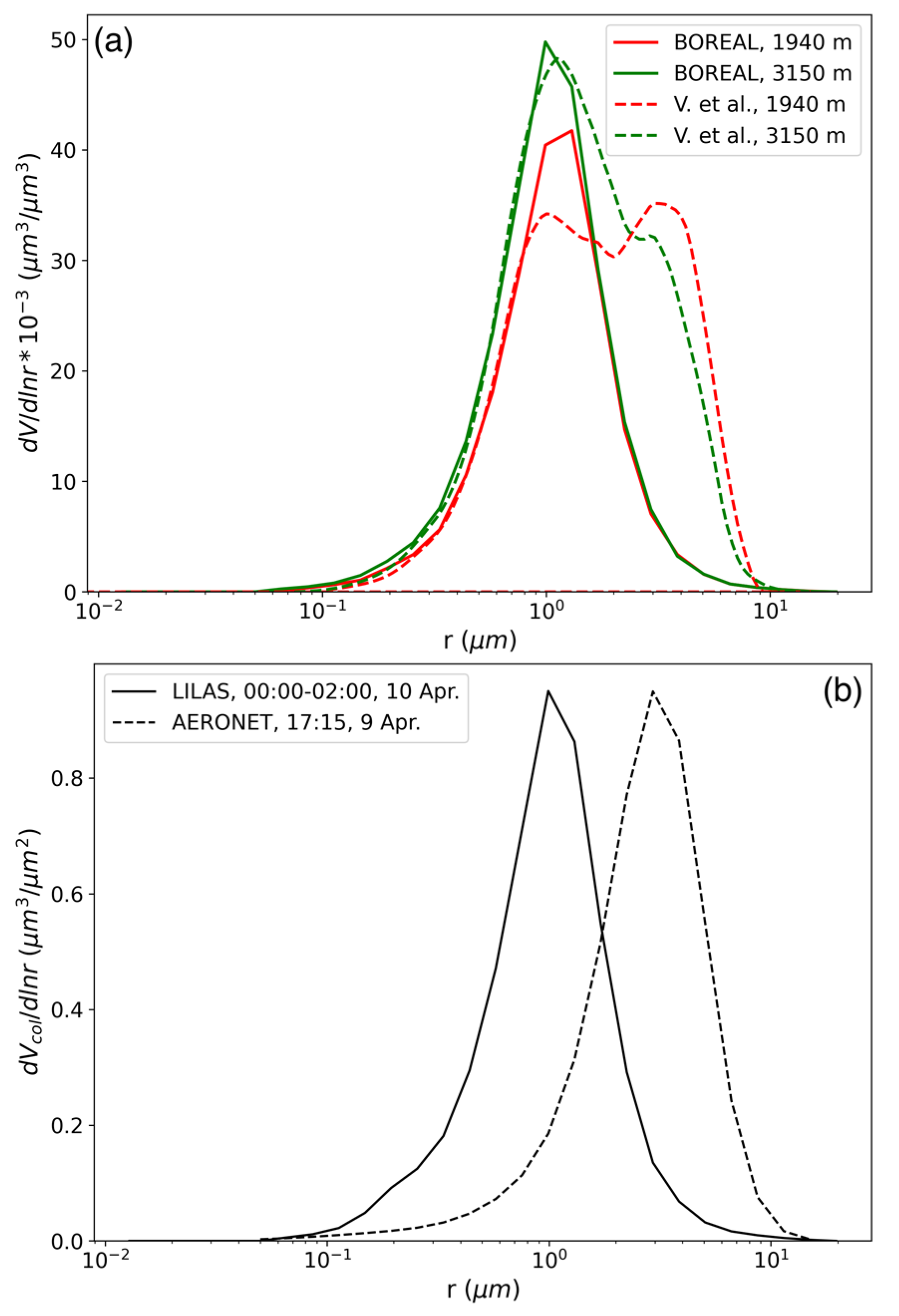
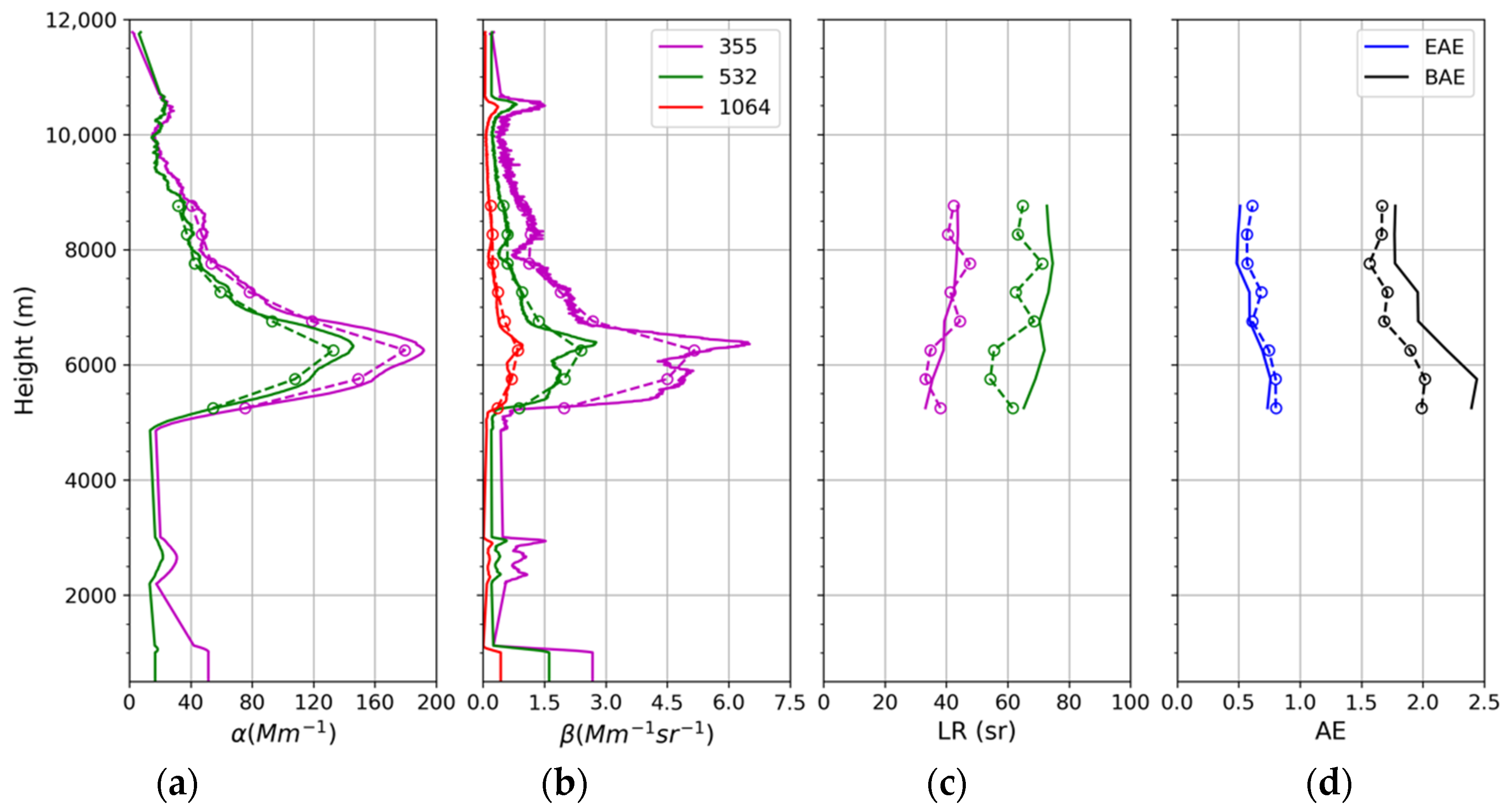
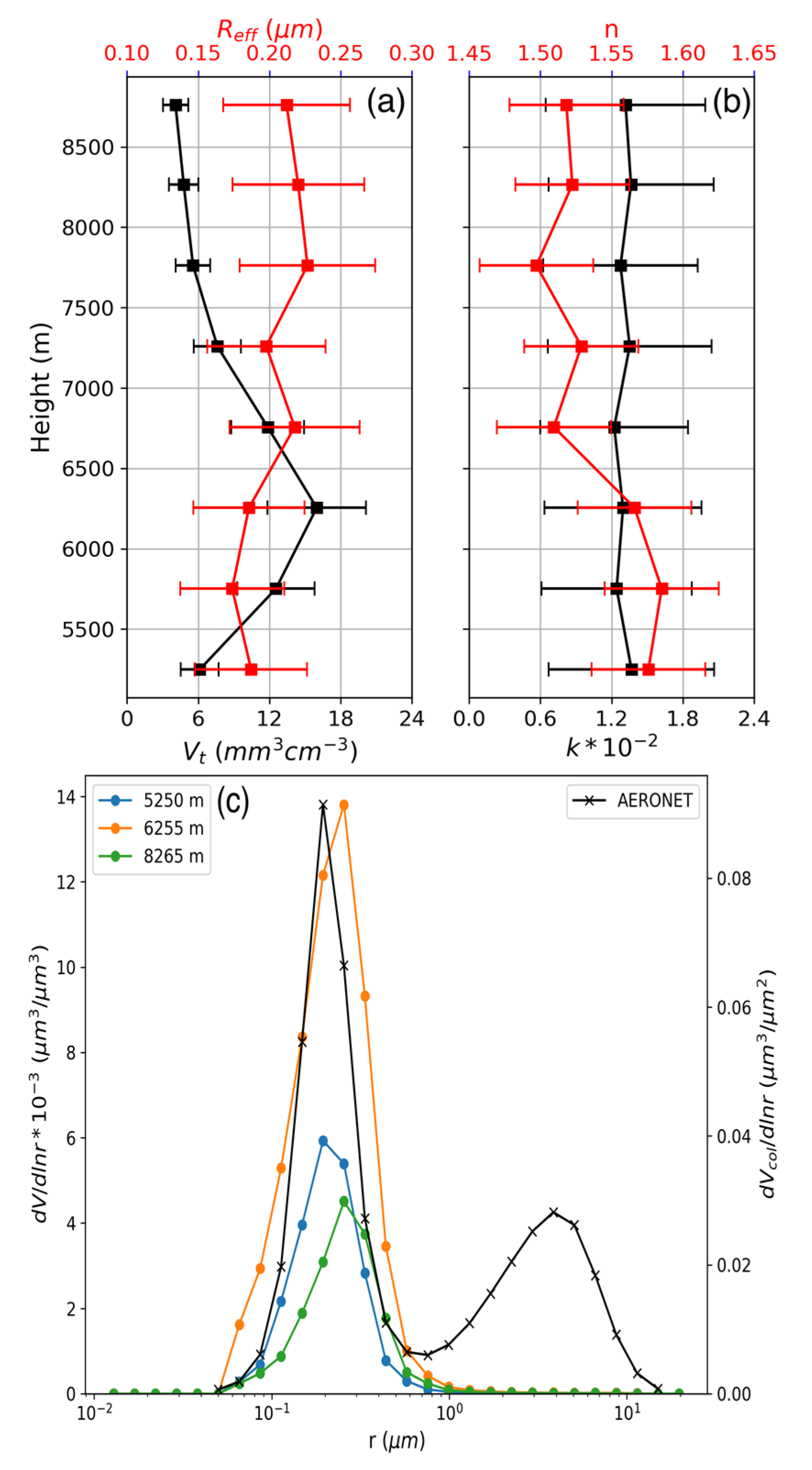
4.1. Case 1: 10 April 2015, Dakar
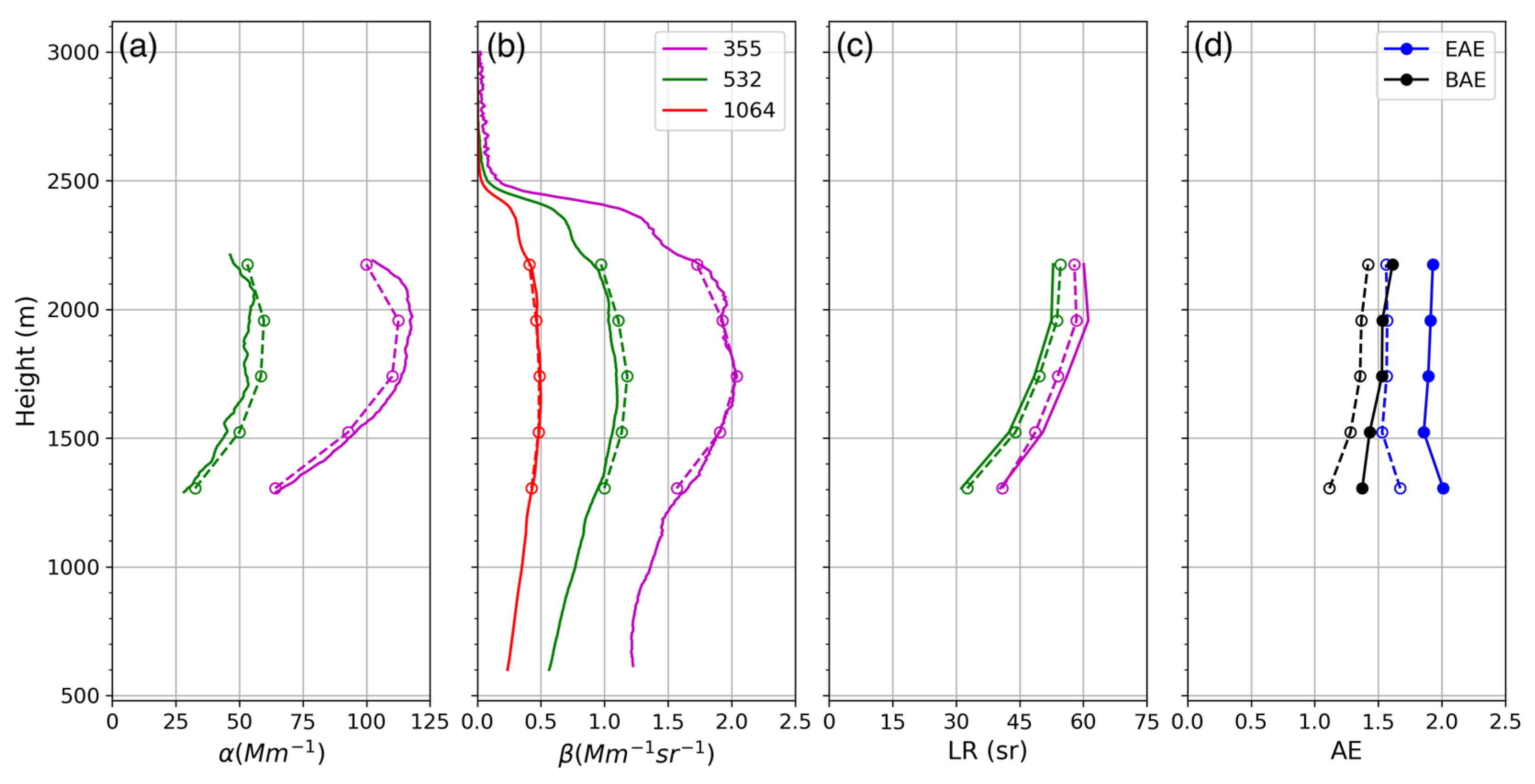
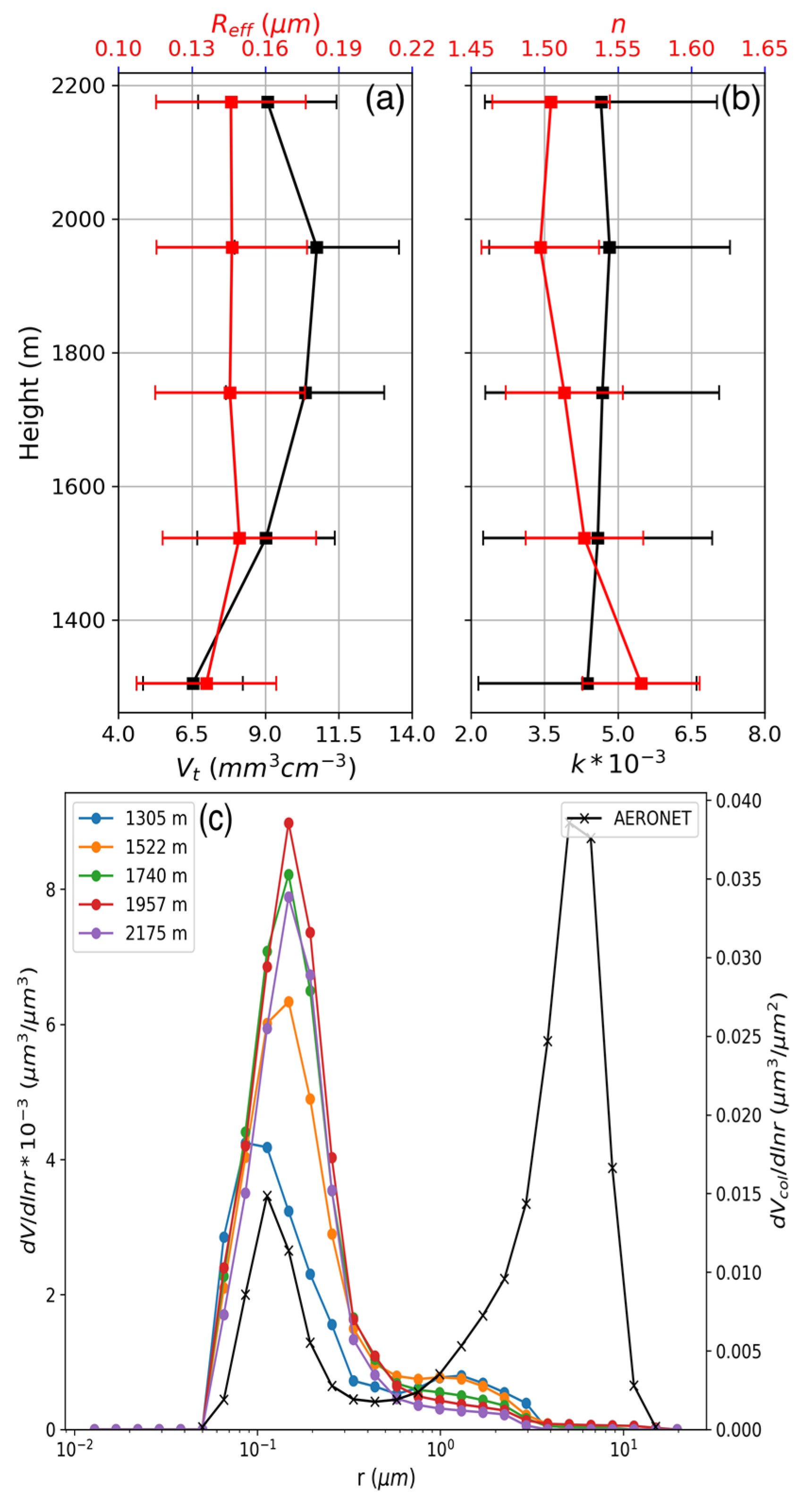
4.2. Case 2: 11–12 September 2020, Lille
4.3. Case 3: 30–31 May 2020, Lille
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Charlson, R.J.; Schwartz, S.E.; Hales, J.M.; Cess, R.D.; Coakley, J.A.; Hansen, J.E.; Hofmann, D.J. Climate Forcing by Anthropogenic Aerosols. Science 1992, 255, 423–430. [Google Scholar] [CrossRef] [PubMed]
- Forster, P.; Storelvmo, T.; Armour, K.; Collins, W.; Dufresne, J.-L.; Frame, D.; Lunt, D.J.; Mauritsen, T.; Palmer, M.D.; Watanabe, M.; et al. The Earth’s Energy Budget, Climate Feedbacks, and Climate Sensitivity. In Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Masson-Delmotte, V., Zhai, P., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2021; pp. 923–1054. [Google Scholar]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanré, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. AERONET—A Federated Instrument Network and Data Archive for Aerosol Characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Deschamps, P.-Y.; Breon, F.-M.; Leroy, M.; Podaire, A.; Bricaud, A.; Buriez, J.-C.; Seze, G. The POLDER Mission: Instrument Characteristics and Scientific Objectives. IEEE Trans. Geosci. Remote Sens. 1994, 32, 598–615. [Google Scholar] [CrossRef]
- Salomonson, V.V.; Barnes, W.L.; Maymon, P.W.; Montgomery, H.E.; Ostrow, H. MODIS: Advanced Facility Instrument for Studies of the Earth as a System. IEEE Trans. Geosci. Remote Sens. 1989, 27, 145–153. [Google Scholar] [CrossRef]
- Haywood, J.M.; Roberts, D.L.; Slingo, A.; Edwards, J.M.; Shine, K.P. General Circulation Model Calculations of the Direct Radiative Forcing by Anthropogenic Sulfate and Fossil-Fuel Soot Aerosol. J. Clim. 1997, 10, 1562–1577. [Google Scholar] [CrossRef]
- Fiocco, G.; Smullin, L.D. Detection of Scattering Layers in the Upper Atmosphere (60–140 Km) by Optical Radar. Nature 1963, 199, 1275–1276. [Google Scholar] [CrossRef]
- Klett, J.D. Lidar Inversion with Variable Backscatter/Extinction Ratios. Appl. Opt. 1985, 24, 1638–1643. [Google Scholar] [CrossRef]
- Zuev, V.E.; Naats, I.E. Inverse Problems of Lidar Sensing of the Atmosphere; Springer: Berlin, Germany, 1983. [Google Scholar]
- Müller, H.; Quenzel, H. Information Content of Multispectral Lidar Measurements with Respect to the Aerosol Size Distribution. Appl. Opt. 1985, 24, 648–654. [Google Scholar] [CrossRef]
- Qing, P.; Nakane, H.; Sasano, Y.; Kitamura, S. Numerical Simulation of the Retrieval of Aerosol Size Distribution from Multiwavelength Laser Radar Measurements. Appl. Opt. 1989, 28, 5259–5265. [Google Scholar] [CrossRef]
- Ansmann, A.; Riebesell, M.; Wandinger, U.; Weitkamp, C.; Voss, E.; Lahmann, W.; Michaelis, W. Combined Raman Elastic-Backscatter LIDAR for Vertical Profiling of Moisture, Aerosol Extinction, Backscatter, and LIDAR Ratio. Appl. Phys. B 1992, 55, 18–28. [Google Scholar] [CrossRef]
- Althausen, D.; Müller, D.; Ansmann, A.; Wandinger, U.; Hube, H.; Clauder, E.; Zörner, S. Scanning 6-Wavelength 11-Channel Aerosol Lidar. J. Atmos. Ocean. Technol. 2000, 17, 1469–1482. [Google Scholar] [CrossRef]
- Piironen, P.; Eloranta, E.W. Demonstration of a High-Spectral-Resolution Lidar Based on an Iodine Absorption Filter. Opt. Lett. 1994, 19, 234–236. [Google Scholar] [CrossRef] [PubMed]
- Rocadenbosch, F.; Mattis, I.; Ansmann, A.; Wandinger, U.; Bockmann, C.; Pappalardo, G.; Amodeo, A.; Bosenberg, J.; Alados-Arboledas, L.; Apituley, A.; et al. The European Aerosol Research Lidar Network (EARLINET): An Overview. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 8–11 July 2008; Volume 2, pp. II-410–II-413. [Google Scholar]
- Welton, E.J.; Campbell, J.R.; Spinhirne, J.D.; Scott, V.S., III. Global Monitoring of Clouds and Aerosols Using a Network of Micropulse Lidar Systems. In Lidar Remote Sensing for Industry and Environment Monitoring; Singh, U.N., Asai, K., Ogawa, T., Singh, U.N., Itabe, T., Sugimoto, N., Eds.; SPIE: Bellingham, WA, USA, 2001; Volume 4153, pp. 151–158. [Google Scholar]
- Nishizawa, T.; Sugimoto, N.; Matsui, I.; Shimizu, A.; Higurashi, A.; Jin, Y. The Asian Dust and Aerosol Lidar Observation Network (AD-NET): Strategy and Progress. In EPJ Web of Conferences; EDP Sciences: Les Ulis, France, 2016; Volume 119, p. 19001. [Google Scholar] [CrossRef] [Green Version]
- Müller, D.; Wandinger, U.; Ansmann, A. Microphysical Particle Parameters from Extinction and Backscatter Lidar Data by Inversion with Regularization: Theory. Appl. Opt. 1999, 38, 2346–2357. [Google Scholar] [CrossRef] [PubMed]
- Böckmann, C. Hybrid Regularization Method for the Ill-Posed Inversion of Multiwavelength Lidar Data in the Retrieval of Aerosol Size Distributions. Appl. Opt. 2001, 40, 1329–1342. [Google Scholar] [CrossRef]
- Veselovskii, I.; Kolgotin, A.; Griaznov, V.; Müller, D.; Wandinger, U.; Whiteman, D.N. Inversion with Regularization for the Retrieval of Tropospheric Aerosol Parameters from Multiwavelength Lidar Sounding. Appl. Opt. 2002, 41, 3685–3699. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Müller, D.; Chemyakin, E.; Kolgotin, A.; Ferrare, R.A.; Hostetler, C.A.; Romanov, A. Automated, Unsupervised Inversion of Multiwavelength Lidar Data with TiARA: Assessment of Retrieval Performance of Microphysical Parameters Using Simulated Data. Appl. Opt. 2019, 58, 4981–5008. [Google Scholar] [CrossRef] [PubMed]
- Donovan, D.P.; Carswell, A.I. Principal Component Analysis Applied to Multiwavelength Lidar Aerosol Backscatter and Extinction Measurements. Appl. Opt. 1997, 36, 9406–9424. [Google Scholar] [CrossRef]
- Veselovskii, I.; Dubovik, O.; Kolgotin, A.; Korenskiy, M.; Whiteman, D.N.; Allakhverdiev, K.; Huseyinoglu, F. Linear Estimation of Particle Bulk Parameters from Multi-Wavelength Lidar Measurements. Atmos. Meas. Tech. 2012, 5, 1135–1145. [Google Scholar] [CrossRef] [Green Version]
- Chemyakin, E.; Müller, D.; Burton, S.; Kolgotin, A.; Hostetler, C.; Ferrare, R. Arrange and Average Algorithm for the Retrieval of Aerosol Parameters from Multiwavelength High-Spectral-Resolution Lidar/Raman Lidar Data. Appl. Opt. 2014, 53, 7252–7266. [Google Scholar] [CrossRef]
- Veselovskii, I.; Kolgotin, A.; Griaznov, V.; Müller, D.; Franke, K.; Whiteman, D.N. Inversion of Multiwavelength Raman Lidar Data for Retrieval of Bimodal Aerosol Size Distribution. Appl. Opt. 2004, 43, 1180–1195. [Google Scholar] [CrossRef]
- Veselovskii, I.; Kolgotin, A.; Müller, D.; Whiteman, D. Information Content of Multiwavelength Lidar Data with Respect to Microphysical Particle Properties Derived from Eigenvalue Analysis. Appl. Opt. 2005, 44, 5292–5303. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burton, S.P.; Chemyakin, E.; Liu, X.; Knobelspiesse, K.; Stamnes, S.; Sawamura, P.; Moore, R.H.; Hostetler, C.A.; Ferrare, R.A. Information Content and Sensitivity of the 3β + 2α Lidar Measurement System for Aerosol Microphysical Retrievals. Atmos. Meas. Tech. 2016, 9, 5555–5574. [Google Scholar] [CrossRef] [Green Version]
- Chemyakin, E.; Burton, S.; Kolgotin, A.; Müller, D.; Hostetler, C.; Ferrare, R. Retrieval of Aerosol Parameters from Multiwavelength Lidar: Investigation of the Underlying Inverse Mathematical Problem. Appl. Opt. 2016, 55, 2188. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kolgotin, A.; Müller, D.; Chemyakin, E.; Romanov, A. Improved Identification of the Solution Space of Aerosol Microphysical Properties Derived from the Inversion of Profiles of Lidar Optical Data, Part 1: Theory. Appl. Opt. 2016, 55, 9839–9849. [Google Scholar] [CrossRef] [PubMed]
- Hu, Q.; Goloub, P.; Veselovskii, I.; Bravo-Aranda, J.-A.; Popovici, I.E.; Podvin, T.; Haeffelin, M.; Lopatin, A.; Dubovik, O.; Pietras, C.; et al. Long-Range-Transported Canadian Smoke Plumes in the Lower Stratosphere over Northern France. Atmos. Chem. Phys. 2019, 19, 1173–1193. [Google Scholar] [CrossRef] [Green Version]
- Veselovskii, I.; Hu, Q.; Goloub, P.; Podvin, T.; Korenskiy, M.; Pujol, O.; Dubovik, O.; Lopatin, A. Combined Use of Mie–Raman and Fluorescence Lidar Observations for Improving Aerosol Characterization: Feasibility Experiment. Atmos. Meas. Tech. 2020, 13, 6691–6701. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D. T-Matrix Computations of Light Scattering by Large Spheroidal Particles. Opt. Commun. 1994, 109, 16–21. [Google Scholar] [CrossRef]
- Yang, P.; Liou, K.N. Geometric-Optics–Integral-Equation Method for Light Scattering by Nonspherical Ice Crystals. Appl. Opt. 1996, 35, 6568–6584. [Google Scholar] [CrossRef]
- DeBoor, C. A Practical Guide to B-Splines; Springer: Berlin/Heidelberg, Germany, 1978; Volume 27. [Google Scholar]
- O’Sullivan, F. A Statistical Perspective on Ill-Posed Inverse Problems. Stat. Sci. 1986, 1, 502–518. [Google Scholar]
- Dubovik, O.; King, M.D. A Flexible Inversion Algorithm for Retrieval of Aerosol Optical Properties from Sun and Sky Radiance Measurements. J. Geophys. Res. Atmos. 2000, 105, 20673–20696. [Google Scholar] [CrossRef]
- Dubovik, O.; Sinyuk, A.; Lapyonok, T.; Holben, B.N.; Mishchenko, M.; Yang, P.; Eck, T.F.; Volten, H.; Muñoz, O.; Veihelmann, B.; et al. Application of Spheroid Models to Account for Aerosol Particle Nonsphericity in Remote Sensing of Desert Dust. J. Geophys. Res. Atmos. 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- Veselovskii, I.; Dubovik, O.; Kolgotin, A.; Lapyonok, T.; Di Girolamo, P.; Summa, D.; Whiteman, D.N.; Mishchenko, M.; Tanré, D. Application of Randomly Oriented Spheroids for Retrieval of Dust Particle Parameters from Multiwavelength Lidar Measurements. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Bi, L.; Lin, W.; Wang, Z.; Tang, X.; Zhang, X.; Yi, B. Optical Modeling of Sea Salt Aerosols: The Effects of Nonsphericity and Inhomogeneity. J. Geophys. Res. Atmos. 2018, 123, 543–558. [Google Scholar] [CrossRef]
- Saito, M.; Yang, P.; Ding, J.; Liu, X. A Comprehensive Database of the Optical Properties of Irregular Aerosol Particles for Radiative Transfer Simulations. J. Atmos. Sci. 2021, 78, 2089–2111. [Google Scholar] [CrossRef]
- Hadamard, J. Lectures on Cauchy’s Problems in Linear Partial Differential Equations; Yale Univ. Press: New Haven, CT, USA, 1923. [Google Scholar]
- Romanov, P.; O’Neill, N.T.; Royer, A.; McArthur, B.L.J. Simultaneous Retrieval of Aerosol Refractive Index and Particle Size Distribution from Ground-Based Measurements of Direct and Scattered Solar Radiation. Appl. Opt. 1999, 38, 7305–7320. [Google Scholar] [CrossRef] [PubMed]
- Pérez-Ramírez, D.; Whiteman, D.N.; Veselovskii, I.; Kolgotin, A.; Korenskiy, M.; Alados-Arboledas, L. Effects of Systematic and Random Errors on the Retrieval of Particle Microphysical Properties from Multiwavelength Lidar Measurements Using Inversion with Regularization. Atmos. Meas. Tech. 2013, 6, 3039–3054. [Google Scholar] [CrossRef] [Green Version]
- Tesche, M.; Ansmann, A.; Müller, D.; Althausen, D.; Engelmann, R.; Freudenthaler, V.; Groß, S. Vertically Resolved Separation of Dust and Smoke over Cape Verde Using Multiwavelength Raman and Polarization Lidars during Saharan Mineral Dust Experiment 2008. J. Geophys. Res. Atmos. 2009, 114. [Google Scholar] [CrossRef]
- Burton, S.P.; Ferrare, R.A.; Hostetler, C.A.; Hair, J.W.; Rogers, R.R.; Obland, M.D.; Butler, C.F.; Cook, A.L.; Harper, D.B.; Froyd, K.D. Aerosol Classification Using Airborne High Spectral Resolution Lidar Measurements—Methodology and Examples. Atmos. Meas. Tech. 2012, 5, 73–98. [Google Scholar] [CrossRef] [Green Version]
- Nicolae, D.; Vasilescu, J.; Talianu, C.; Binietoglou, I.; Nicolae, V.; Andrei, S.; Antonescu, B. A Neural Network Aerosol-Typing Algorithm Based on Lidar Data. Atmos. Chem. Phys. 2018, 18, 14511–14537. [Google Scholar] [CrossRef] [Green Version]
- Veselovskii, I.; Hu, Q.; Goloub, P.; Podvin, T.; Barchunov, B.; Korenskii, M. Combining Mie–Raman and Fluorescence Observations: A Step Forward in Aerosol Classification with Lidar Technology. Atmos. Meas. Tech. 2022, 15, 4881–4900. [Google Scholar] [CrossRef]
- Di Biagio, C.; Formenti, P.; Balkanski, Y.; Caponi, L.; Cazaunau, M.; Pangui, E.; Journet, E.; Nowak, S.; Andreae, M.O.; Kandler, K.; et al. Complex Refractive Indices and Single-Scattering Albedo of Global Dust Aerosols in the Shortwave Spectrum and Relationship to Size and Iron Content. Atmos. Chem. Phys. 2019, 19, 15503–15531. [Google Scholar] [CrossRef] [Green Version]
- Dubovik, O.; Holben, B.; Eck, T.F.; Smirnov, A.; Kaufman, Y.J.; King, M.D.; Tanré, D.; Slutsker, I. Variability of Absorption and Optical Properties of Key Aerosol Types Observed in Worldwide Locations. J. Atmos. Sci. 2002, 59, 590–608. [Google Scholar] [CrossRef]
- Fisher, R.A.; Russell, E.J. On the Mathematical Foundations of Theoretical Statistics. Philos. Trans. R. Soc. London. Ser. A Contain. Pap. A Math. Or Phys. Character 1922, 222, 309–368. [Google Scholar] [CrossRef] [Green Version]
- Tarantola, A. Inverse Problem Theory: Methods for Data Fitting and Model Parameter Estimation; Elsevier Sci: New York, NY, USA, 1987. [Google Scholar]
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding: Theory and Practice; Atmospheric, Oceanic and Planetary Physics; World Scientific Publishing Co. Pte. Ltd.: Singapore, 2000; Volume 2. [Google Scholar]
- Gavin, H.P. The Levenberg-Marquardt Algorithm for Nonlinear Least Squares Curve-Fitting Problems; Department of Civil and Environmental Engineering, Duke University: Durham, NC, USA, 2020. [Google Scholar]
- Davies, C.N. Size Distribution of Atmospheric Particles. J. Aerosol Sci. 1974, 5, 293–300. [Google Scholar] [CrossRef]
- Whitby, K.T. THE PHYSICAL CHARACTERISTICS OF SULFUR AEROSOLS. In Sulfur in the Atmosphere; Husar, R.B., Lodge, J.P., Moore, D.J., Eds.; Pergamon: Oxford, UK, 1978; pp. 135–159. ISBN 978-0-08-022932-4. [Google Scholar]
- Ott, W.R. A Physical Explanation of the Lognormality of Pollutant Concentrations. J. Air Waste Manag. Assoc. 1990, 40, 1378–1383. [Google Scholar] [CrossRef] [Green Version]
- Remer, L.A.; Kaufman, Y.J. Dynamic Aerosol Model: Urban/Industrial Aerosol. J. Geophys. Res. Atmos. 1998, 103, 13859–13871. [Google Scholar] [CrossRef] [Green Version]
- Tanré, D.; Remer, L.A.; Kaufman, Y.J.; Mattoo, S.; Hobbs, P.V.; Livingston, J.M.; Russell, P.B.; Smirnov, A. Retrieval of Aerosol Optical Thickness and Size Distribution over Ocean from the MODIS Airborne Simulator during TARFOX. J. Geophys. Res. Atmos. 1999, 104, 2261–2278. [Google Scholar] [CrossRef]
- Zhang, X. Matrix Analysis and Applications; Wang, Y., Ed.; Tsinghua University Press: Beijing, China, 2013. [Google Scholar]
- Omar, A.; Won, J.-G.; Winker, D.; Yoon, S.; Dubovik, O.; Mccormick, M. Development of Global Aerosol Models Using Cluster Analysis of Aerosol Robotic Network (AERONET) Measurements. J. Geophys. Res 2005, 110, 10–14. [Google Scholar] [CrossRef]
- Müller, D.; Ansmann, A.; Mattis, I.; Tesche, M.; Wandinger, U.; Althausen, D.; Pisani, G. Aerosol-Type-Dependent Lidar Ratios Observed with Raman Lidar. J. Geophys. Res. Atmos. 2007, 112. [Google Scholar] [CrossRef]
- Müller, D.; Veselovskii, I.; Kolgotin, A.; Tesche, M.; Ansmann, A.; Dubovik, O. Vertical Profiles of Pure Dust and Mixed Smoke–Dust Plumes Inferred from Inversion of Multiwavelength Raman/Polarization Lidar Data and Comparison to AERONET Retrievals and in Situ Observations. Appl. Opt. 2013, 52, 3178–3202. [Google Scholar] [CrossRef]
- Hu, Q.; Wang, H.; Goloub, P.; Li, Z.; Veselovskii, I.; Podvin, T.; Li, K.; Korenskiy, M. The Characterization of Taklamakan Dust Properties Using a Multiwavelength Raman Polarization Lidar in Kashi, China. Atmos. Chem. Phys. 2020, 20, 13817–13834. [Google Scholar] [CrossRef]
- Veselovskii, I.; Goloub, P.; Podvin, T.; Bovchaliuk, V.; Derimian, Y.; Augustin, P.; Fourmentin, M.; Tanre, D.; Korenskiy, M.; Whiteman, D.N.; et al. Retrieval of Optical and Physical Properties of African Dust from Multiwavelength Raman Lidar Measurements during the SHADOW Campaign in Senegal. Atmos. Chem. Phys. 2016, 16, 7013–7028. [Google Scholar] [CrossRef] [Green Version]
- Hu, Q.; Goloub, P.; Veselovskii, I.; Podvin, T. The Characterization of Long-Range Transported North American Biomass Burning Plumes: What Can a Multi-Wavelength Mie–Raman-Polarization-Fluorescence Lidar Provide? Atmos. Chem. Phys. 2022, 22, 5399–5414. [Google Scholar] [CrossRef]
- Guyon, P.; Boucher, O.; Graham, B.; Beck, J.; Mayol-Bracero, O.L.; Roberts, G.C.; Maenhaut, W.; Artaxo, P.; Andreae, M.O. Refractive Index of Aerosol Particles over the Amazon Tropical Forest during LBA-EUSTACH 1999. J. Aerosol Sci. 2003, 34, 883–907. [Google Scholar] [CrossRef]
- Hoyningen-Huene, W.; von Schmidt, T.; Schienbein, S.; Kee, C.A.; Tick, L.J. Climate-Relevant Aerosol Parameters of South-East-Asian Forest Fire Haze. Atmos. Environ. 1999, 33, 3183–3190. [Google Scholar] [CrossRef]
- Yamasoe, M.A.; Kaufman, Y.J.; Dubovik, O.; Remer, L.A.; Holben, B.N.; Artaxo, P. Retrieval of the Real Part of the Refractive Index of Smoke Particles from Sun/Sky Measurements during SCAR-B. J. Geophys. Res. Atmos. 1998, 103, 31893–31902. [Google Scholar] [CrossRef] [Green Version]
- Schuster, G.L.; Dubovik, O.; Holben, B.N. Angstrom Exponent and Bimodal Aerosol Size Distributions. J. Geophys. Res. Atmos. 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- Veselovskii, I.; Hu, Q.; Goloub, P.; Podvin, T.; Choël, M.; Visez, N.; Korenskiy, M. Mie–Raman–Fluorescence Lidar Observations of Aerosols during Pollen Season in the North of France. Atmos. Meas. Tech. 2021, 14, 4773–4786. [Google Scholar] [CrossRef]
- Ducos, F.; Hu, Q.; Popovici, I. AUSTRAL User’s Guide—AUtomated Server for the TReatment of Atmospheric Lidars. 2022. Available online: https://www.researchgate.net/publication/362155848_AUSTRAL_User's_Guide_AUtomated_Server_for_the_TReatment_of_Atmospheric_Lidars (accessed on 30 August 2022).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SD Type | ||||||||
|---|---|---|---|---|---|---|---|---|
| MF | 1 | 0.2 | 0.4 | 0 | 0 | 0 | 1 | 0.18 |
| MC | 0 | 0 | 0 | 1 | 1.2 | 0.6 | 1 | 0.99 |
| BF | 2/3 | 0.2 | 0.4 | 1/3 | 2 | 0.6 | 1 | 0.26 |
| BC | 1/6 | 0.2 | 0.4 | 5/6 | 2 | 0.6 | 1 | 0.70 |
| 1.4, 1.45, 1.5, 1.55, 1.6 | ||||||||
| 0.001, 0.005, 0.01, 0.015, 0.02 | ||||||||
| Error-Free Optical Data | Error-Contaminated Optical Data | |||||||
|---|---|---|---|---|---|---|---|---|
| MF | −0.05 | −53% | 13% | 11% | −0.05 (2%) | −52% (10%) | 16 (11%) | 11% (15%) |
| MC | −0.03 | −49% | −8% | −4% | −0.03 (1%) | −51% (8%) | −9% (12%) | −6% (12%) |
| BF | −0.05 | −49% | 6% | 4% | −0.05 (2%) | −47 (9%) | 24% (19%) | 15% (23%) |
| BC | −0.06 | −44% | 4% | −4% | −0.06 (1%) | −46% (9%) | 10% (22%) | 0% (26%) |
| Error-Free Optical Data | Error-Contaminated Optical Data | |||||||
|---|---|---|---|---|---|---|---|---|
| MF | 13% | 8% | 0.030 | 49% | 26% | 21% | 0.045 | 51% |
| MC | 24% | 19% | 0.031 | 43% | 24% | 22% | 0.038 | 52% |
| BF | 18% | 16% | 0.034 | 55% | 25% | 28% | 0.040 | 52% |
| BC | 23% | 19% | 0.042 | 55% | 35% | 36% | 0.045 | 65% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, Y.; Hu, Q.; Goloub, P.; Veselovskii, I.; Podvin, T. Retrieval of Aerosol Microphysical Properties from Multi-Wavelength Mie–Raman Lidar Using Maximum Likelihood Estimation: Algorithm, Performance, and Application. Remote Sens. 2022, 14, 6208. https://doi.org/10.3390/rs14246208
Chang Y, Hu Q, Goloub P, Veselovskii I, Podvin T. Retrieval of Aerosol Microphysical Properties from Multi-Wavelength Mie–Raman Lidar Using Maximum Likelihood Estimation: Algorithm, Performance, and Application. Remote Sensing. 2022; 14(24):6208. https://doi.org/10.3390/rs14246208
Chicago/Turabian StyleChang, Yuyang, Qiaoyun Hu, Philippe Goloub, Igor Veselovskii, and Thierry Podvin. 2022. "Retrieval of Aerosol Microphysical Properties from Multi-Wavelength Mie–Raman Lidar Using Maximum Likelihood Estimation: Algorithm, Performance, and Application" Remote Sensing 14, no. 24: 6208. https://doi.org/10.3390/rs14246208