
Characterizing Garden Greenspace in a Medieval European City: Added Values of Spatial Resolution and Multi-Temporal Stereo Imagery

 ,
,
Abstract
:1. Introduction
2. Materials and Data Sets
2.1. Study Area
2.2. Remotely Sensed Imagery
2.3. Thematic Layers
2.3.1. Plant Phenology (PP)
2.3.2. Normalized Digital Surface Model (nDSM)
2.3.3. Garden Parcels
- 1.
- does not overlap with an agricultural parcel or a railroad;
- 2.
- contains at least one main buildings;
- 3.
- or contains one or more side buildings, which share a border with an administrative parcel that contains one or more main buildings;
- 4.
- or does not contain a building but overlaps with a building block that contains more than 60% administrative parcels with one or more main buildings;
- 5.
- has been cut by roads, main buildings, and buildings > 20 m2;
- 6.
- has been cleaned from slivers.
- 7.
- The above procedures produced more than 15,000 garden parcels in study area.
2.3.4. Field Inventory
3. Greenspace Mapping in Gardens
3.1. Classification Designs
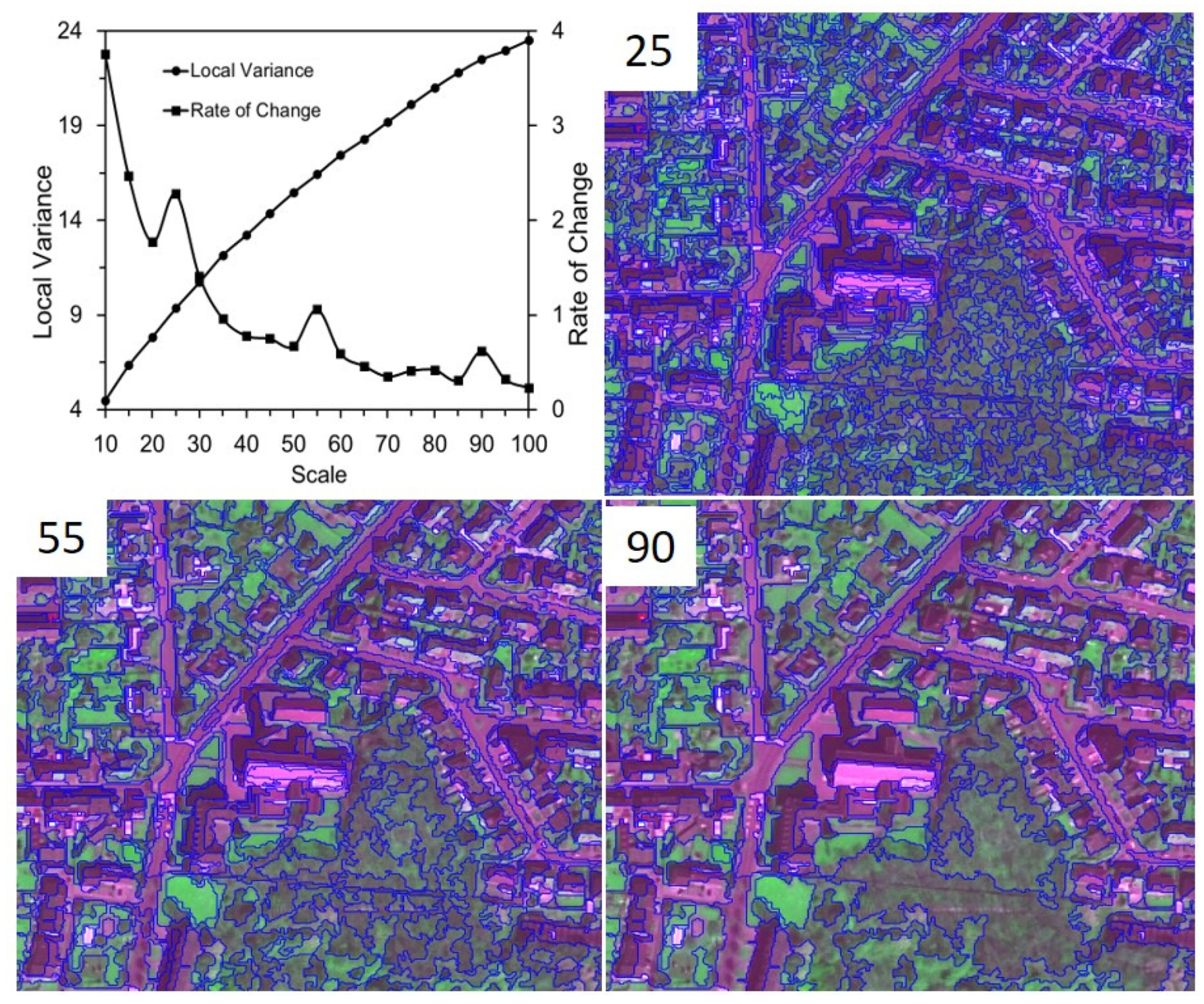
3.2. Image Segmentation
3.3. Classification Procedures
3.3.1. Classification Using Single Satellite Imagery (Schemes a to c)
3.3.2. Classification Integrating Multi-Temporal Stereo Satellite Imagery (Schemes d to f)
3.4. Accuracy Assessment
4. Results and Discussion
4.1. Validation of Thematic Layers
4.1.1. nDSM Layer
4.1.2. Garden Parcels
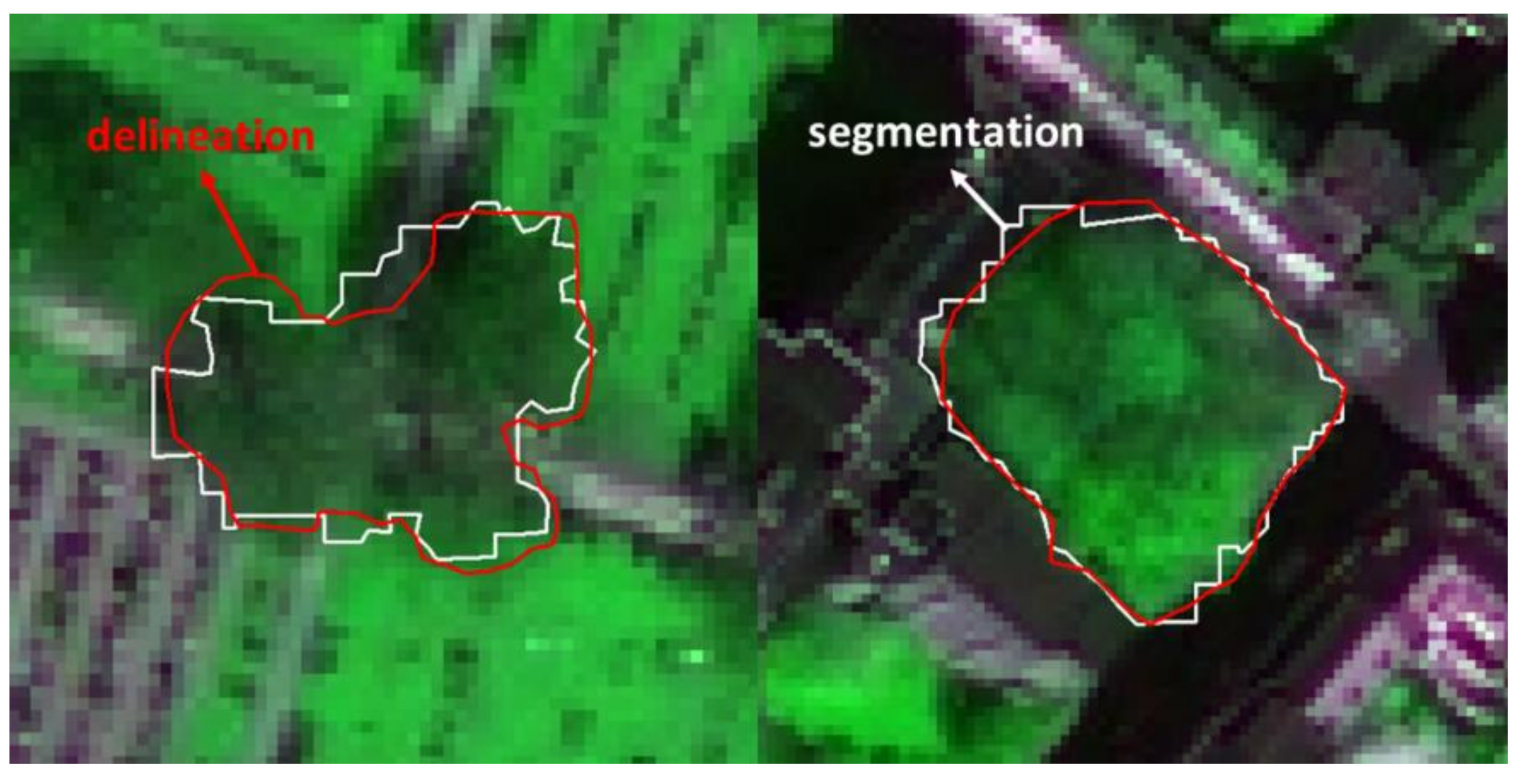
4.1.3. Image Objects
4.2. A Higher Spatial Resolution Improves Greenspace Mapping in Gardens
4.3. Time-Series and Stereo Imagery Improve Greenspace Mapping in Gardens
4.4. Greenspace Landscapes in Gardens Parcels
4.5. Applicability and Limitation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pickett, S.T.A.; Cadenasso, M.L.; Grove, J.M.; Boone, C.G.; Groffman, P.M.; Irwin, E.; Kaushal, S.S.; Marshall, V.; McGrath, B.P.; Nilon, C.H.; et al. Urban ecological systems: Scientific foundations and a decade of progress. J. Environ. Manag. 2011, 92, 331–362. [Google Scholar] [CrossRef]
- Johnson, B. The Greatest City on Earth; Greater London Authority: London, UK, 2013. [Google Scholar]
- Pincetl, S. From the sanitary city to the sustainable city: Challenges to institutionalising biogenic (nature’s services) infrastructure. Local Environ. 2010, 15, 43–58. [Google Scholar] [CrossRef]
- Loram, A.; Warren, P.; Thompson, K.; Gaston, K. Urban Domestic Gardens: The Effects of Human Interventions on Garden Composition. Environ. Manag. 2011, 48, 808–824. [Google Scholar] [CrossRef] [PubMed]
- Lowry, J.H.; Baker, M.E.; Ramsey, D. Determinants of urban tree canopy in residential neighborhoods: Household characteristics, urban form, and the geophysical landscape. Urban Ecosyst. 2012, 15, 247–266. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, J.; Cadenasso, M.L. Effects of the spatial configuration of trees on urban heat mitigation: A comparative study. Remote Sens. Environ. 2017, 195, 1–12. [Google Scholar] [CrossRef]
- Yan, J.; Zhou, W.; Jenerette, G.D. Testing an energy exchange and microclimate cooling hypothesis for the effect of vegetation configuration on urban heat. Agric. For. Meteorol. 2019, 279, 107666. [Google Scholar] [CrossRef]
- Beckett, K.P.; Freer-Smith, P.H.; Taylor, G. Particulate pollution capture by urban trees: Effect of species and windspeed. Glob. Chang. Biol. 2000, 6, 995–1003. [Google Scholar] [CrossRef]
- Lin, L.; Yan, J.; Ma, K.; Zhou, W.; Chen, G.; Tang, R.; Zhang, Y. Characterization of particulate matter deposited on urban tree foliage: A landscape analysis approach. Atmos. Environ. 2017, 171, 59–69. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Veness, T.; Quinton, W.; Baltzer, J. A decision-tree classification for low-lying complex land cover types within the zone of discontinuous permafrost. Remote Sens. Environ. 2014, 143, 73–84. [Google Scholar] [CrossRef]
- Nichol, J.; Wong, M.S. Remote sensing of urban vegetation life form by spectral mixture analysis of high-resolution IKONOS satellite images. Int. J. Remote Sens. 2007, 28, 985–1000. [Google Scholar] [CrossRef]
- Pu, R.; Landry, S. A comparative analysis of high spatial resolution IKONOS and WorldView-2 imagery for mapping urban tree species. Remote Sens. Environ. 2012, 124, 516–533. [Google Scholar] [CrossRef]
- Van De Voorde, T.; Vlaeminck, J.; Canters, F. Comparing different approaches for mapping urban vegetation cover from landsat ETM+ data: A case study on brussels. Sensors 2008, 8, 3880–3902. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, D.; Ke, Y.; Gong, H.; Li, X. Object-based urban tree species classification using bi-temporal worldview-2 and worldview-3 images. Remote Sens. 2015, 7, 16917–16937. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Yang, X. Mapping vegetation in an urban area with stratified classification and multiple endmember spectral mixture analysis. Remote Sens. Environ. 2013, 133, 251–264. [Google Scholar] [CrossRef]
- Mathieu, R.; Freeman, C.; Aryal, J. Mapping private gardens in urban areas using object-oriented techniques and very high-resolution satellite imagery. Landsc. Urban Plan. 2007, 81, 179–192. [Google Scholar] [CrossRef]
- Rapinel, S.; Clément, B.; Magnanon, S.; Sellin, V.; Hubert-Moy, L. Identification and mapping of natural vegetation on a coastal site using a Worldview-2 satellite image. J. Environ. Manag. 2014, 144, 236–246. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elvidge, C.D.; Portigal, F.P. Change detection in vegetation using 1989 AVIRIS data. Imaging Spectrosc. Terr. Environ. 1990, 1298, 178–189. [Google Scholar] [CrossRef]
- Wolter, P.T.; Mladenoff, D.J.; Host, G.E.; Crow, T.R. Improved forest classification in the northern Lake States using multi-temporal Landsat imagery. Photogramm. Eng. Remote Sens. 1995, 61, 1129–1143. [Google Scholar]
- Hemmerling, J.; Pflugmacher, D.; Hostert, P. Mapping temperate forest tree species using dense Sentinel-2 time series. Remote Sens. Environ. 2021, 267, 112743. [Google Scholar] [CrossRef]
- Bradley, B.A.; Mustard, J.F. Comparison of phenology trends by land cover class: A case study in the Great Basin, USA. Glob. Chang. Biol. 2008, 14, 334–346. [Google Scholar] [CrossRef] [Green Version]
- Hmimina, G.; Dufrêne, E.; Pontailler, J.Y.; Delpierre, N.; Aubinet, M.; Caquet, B.; de Grandcourt, A.; Burban, B.; Flechard, C.; Granier, A.; et al. Evaluation of the potential of MODIS satellite data to predict vegetation phenology in different biomes: An investigation using ground-based NDVI measurements. Remote Sens. Environ. 2013, 132, 145–158. [Google Scholar] [CrossRef]
- Ganguly, S.; Friedl, M.A.; Tan, B.; Zhang, X.; Verma, M. Land surface phenology from MODIS: Characterization of the Collection 5 global land cover dynamics product. Remote Sens. Environ. 2010, 114, 1805–1816. [Google Scholar] [CrossRef] [Green Version]
- Terryn, L.; Calders, K.; Disney, M.; Origo, N.; Malhi, Y.; Newnham, G.; Raumonen, P.; Åkerblom, M.; Verbeeck, H. Tree species classification using structural features derived from terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2020, 168, 170–181. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Tree species classification in the Southern Alps based on the fusion of very high geometrical resolution multispectral/hyperspectral images and LiDAR data. Remote Sens. Environ. 2012, 123, 258–270. [Google Scholar] [CrossRef]
- Pu, R.; Landry, S. Mapping urban tree species by integrating multi-seasonal high resolution pléiades satellite imagery with airborne LiDAR data. Urban For. Urban Green. 2020, 53, 126675. [Google Scholar] [CrossRef]
- Huang, X.; Wen, D.; Li, J.; Qin, R. Multi-level monitoring of subtle urban changes for the megacities of China using high-resolution multi-view satellite imagery. Remote Sens. Environ. 2017, 196, 56–75. [Google Scholar] [CrossRef]
- Zhao, S.; Jiang, X.; Li, G.; Chen, Y.; Lu, D. Integration of ZiYuan-3 multispectral and stereo imagery for mapping urban vegetation using the hierarchy-based classifier. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102594. [Google Scholar] [CrossRef]
- Kothencz, G.; Kulessa, K.; Anyyeva, A.; Lang, S. Urban vegetation extraction from VHR (tri-)stereo imagery–a comparative study in two central European cities. Eur. J. Remote Sens. 2018, 51, 285–300. [Google Scholar] [CrossRef] [Green Version]
- Baker, F.; Smith, C. A GIS and object based image analysis approach to mapping the greenspace composition of domestic gardens in Leicester, UK. Landsc. Urban Plan. 2019, 183, 133–146. [Google Scholar] [CrossRef]
- Davies, Z.G.; Fuller, R.A.; Loram, A.; Irvine, K.N.; Sims, V.; Gaston, K.J. A national scale inventory of resource provision for biodiversity within domestic gardens. Biol. Conserv. 2009, 142, 761–771. [Google Scholar] [CrossRef] [Green Version]
- Perry, T.; Nawaz, R. An investigation into the extent and impacts of hard surfacing of domestic gardens in an area of Leeds, United Kingdom. Landsc. Urban Plan. 2008, 86, 1–13. [Google Scholar] [CrossRef]
- Verbeeck, K.; Van Orshoven, J.; Hermy, M. Measuring extent, location and change of imperviousness in urban domestic gardens in collective housing projects. Landsc. Urban Plan. 2011, 100, 57–66. [Google Scholar] [CrossRef]
- Warhurst, J.R.; Parks, K.E.; McCulloch, L.; Hudson, M.D. Front gardens to car parks: Changes in garden permeability and effects on flood regulation. Sci. Total Environ. 2014, 485–486, 329–339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmidt, E. Zur Theorie der linearen und nicht linearen Integralgleichungen. Allg. Lineare Integr. 1907, 161–174. [Google Scholar]
- Alimuddin, I.; Sumantyo, J.T.S.; Kuze, H. Assessment of pan-sharpening methods applied to image fusion of remotely sensed multi-band data. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 165–175. [Google Scholar] [CrossRef]
- Leviten-Reid, C.; Matthew, R.A. Housing Tenure and Neighbourhood Social Capital. Hous. Theory Soc. 2018, 35, 300–328. [Google Scholar] [CrossRef]
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and evaluating different LiDAR-derived canopy height model generation methods for tree height estimation. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Pudup, M.B. It takes a garden: Cultivating citizen-subjects in organized garden projects. Geoforum 2008, 39, 1228–1240. [Google Scholar] [CrossRef]
- Stewart, I.D.; Oke, T.R. Local climate zones for urban temperature studies. Bull. Am. Meteorol. Soc. 2012, 93, 1879–1900. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Shao, G. Object-based urban vegetation mapping with high-resolution aerial photography as a single data source. Int. J. Remote Sens. 2013, 34, 771–789. [Google Scholar] [CrossRef]
- Drǎguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, J.; Zhou, W.; Han, L.; Qian, Y. Mapping vegetation functional types in urban areas with WorldView-2 imagery: Integrating object-based classification with phenology. Urban For. Urban Green. 2018, 31, 230–240. [Google Scholar] [CrossRef]
- Qian, Y.; Zhou, W.; Nytch, C.J.; Han, L.; Li, Z. A new index to differentiate tree and grass based on high resolution image and object-based methods. Urban For. Urban Green. 2020, 53, 126661. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Browning, D.M.; Rango, A. A comparison of three feature selection methods for object-based classification of sub-decimeter resolution UltraCam-L imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 15, 70–78. [Google Scholar] [CrossRef]
- Shao, Y.; Lunetta, R.S. Comparison of support vector machine, neural network, and CART algorithms for the land-cover classification using limited training data points. ISPRS J. Photogramm. Remote Sens. 2012, 70, 78–87. [Google Scholar] [CrossRef]
- Degerickx, J.; Roberts, D.A.; McFadden, J.P.; Hermy, M.; Somers, B. Urban tree health assessment using airborne hyperspectral and LiDAR imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 26–38. [Google Scholar] [CrossRef] [Green Version]
- Immitzer, M.; Atzberger, C.; Koukal, T. Remote Sensing Tree Species Classification with Random Forest Using Very High Spatial Resolution 8-Band WorldView-2 Satellite Data. Remote Sens. 2012, 4, 2661–2693. [Google Scholar] [CrossRef] [Green Version]
- Zhou, W.; Troy, A. An object-oriented approach for analysing and characterizing urban landscape at the parcel level. Int. J. Remote Sens. 2008, 29, 3119–3135. [Google Scholar] [CrossRef]
- Tigges, J.; Lakes, T.; Hostert, P. Urban vegetation classification: Benefits of multitemporal RapidEye satellite data. Remote Sens. Environ. 2013, 136, 66–75. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, X.; Jiang, H. Object-oriented method for urban vegetation mapping using ikonos imagery. Int. J. Remote Sens. 2010, 31, 177–196. [Google Scholar] [CrossRef]
- Zhou, W.; Huang, G.; Troy, A.; Cadenasso, M.L. Object-based land cover classification of shaded areas in high spatial resolution imagery of urban areas: A comparison study. Remote Sens. Environ. 2009, 113, 1769–1777. [Google Scholar] [CrossRef]
- Zhou, Y.; Qiu, F. Fusion of high spatial resolution WorldView-2 imagery and LiDAR pseudo-waveform for object-based image analysis. ISPRS J. Photogramm. Remote Sens. 2015, 101, 221–232. [Google Scholar] [CrossRef]
- Liu, L.; Coops, N.C.; Aven, N.W.; Pang, Y. Mapping urban tree species using integrated airborne hyperspectral and LiDAR remote sensing data. Remote Sens. Environ. 2017, 200, 170–182. [Google Scholar] [CrossRef]
- Senf, C.; Leitão, P.J.; Pflugmacher, D.; van der Linden, S.; Hostert, P. Mapping land cover in complex Mediterranean landscapes using Landsat: Improved classification accuracies from integrating multi-seasonal and synthetic imagery. Remote Sens. Environ. 2015, 156, 527–536. [Google Scholar] [CrossRef]
- Fiers, E.; Delarue, S.; Coremans, G.; Tijskens, G. Tuinen in de Stad (Gardens in the City). Groenbeheer, een Verhaal voor de Toekomst (Green Management, a Story with a Future); Velt vzw ism afd. Bos en Groen: Berchem, Belgium, 2005. [Google Scholar]
- Sun, C.; Lin, T.; Zhao, Q.; Li, X.; Ye, H.; Zhang, G.; Liu, X.; Zhao, Y. Spatial pattern of urban green spaces in a long-term compact urbanization process—A case study in China. Ecol. Indic. 2019, 96, 111–119. [Google Scholar] [CrossRef]
- Haaland, C.; van den Bosch, C.K. Challenges and strategies for urban green-space planning in cities undergoing densification: A review. Urban For. Urban Green. 2015, 14, 760–771. [Google Scholar] [CrossRef]
- Goddard, M.A.; Dougill, A.J.; Benton, T.G. Scaling up from gardens: Biodiversity conservation in urban environments. Trends Ecol. Evol. 2010, 25, 90–98. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Acquisition Date | Spatial Resolution | Multi-Spectral Band | Stereo Image |
|---|---|---|---|---|
| ALOS-2 | 16 May 2019 | 2.5 m | Blue: 420–500 nm; Green: 520–600 nm; Red: 610–690 nm; Near-Infrared: 760–890 nm | No |
| SPOT-7 | 22 July 2019 | 1.5 m | Blue: 455–525 nm; Green: 530–590 nm; Red: 625–695 nm; Near-Infrared: 760–890 nm | No |
| Pleiades-1A | 4 December 2019 | 0.5 m | Blue: 430–550 nm; Green: 490–610 nm; Red: 600–720 nm; Near Infrared: 750–950 nm | No |
| 7 March 2020 | 0.5 m | No | ||
| 31 July 2020 | 0.5 m | Yes |
| Building Density | Building Height | Greenspace Coverage | LCZ Class |
|---|---|---|---|
| ≥0.25 | ≥8 m | ≥67% | 111 * |
| 34−67% | 112 | ||
| ≤34% | 113 | ||
| <8 m | ≥67% | 121 * | |
| 34−67% | 122 | ||
| ≤34% | 123 | ||
| <0.25 | ≥8 m | ≥67% | 211 * |
| 34%−67% | 212 | ||
| ≤34% | 213 | ||
| <8 m | ≥67% | 221 | |
| 34−67% | 222 | ||
| ≤34% | 213 |
| Class Name (Object Level) | Feature (Threshold) | Class Name (Object Level) | Feature (Threshold) |
|---|---|---|---|
| Unshaded area (25) | Brightness (36); Mean Red (387) | Shaded area (25) | Brightness (36); Mean Red (387) |
| Tree & Building shadow (55) | Area (100 m2); Brightness (24) Relative border to green (0.5) | ||
| Unshaded green (25) | NDVI (0.24); Mean Blue (445) | Shaded green (55) | NDVI (0.13) in tree shadow NDVI (0.08) in building show |
| High & low green (55) | −Log(canny_NIR) + Brightness (51.24) | High & low green (55) | −Log(canny_NIR)+Brightness (36.81) |
| Deciduous & evergreen (55) | Mean NIR (236); Ratio G/R(1.34); Hue-R_G_B (0.21) | Deciduous & evergreen (55) | Mean NIR (197); Ratio G/R (1.15); Hue-R_G_B (0.16) |
| High deciduous & evergreen (55) | Ratio G/R (1.52); GLCM-H_NIR (0.14); GLCM-H_G (0.19); Hue-R_G_B (0.31) | High deciduous & evergreen (55) | Ratio G/R (1.29); GLCM-H_NIR (0.06); GLCM-H_G (0.12); Hue-R_G_B (0.22) |
| Low deciduous & evergreen (55) | Mean NIR (279); Ratio R/NIR (0.56); Hue-G_R_NIR (0.23); GLCM-H_NIR (0.1) | Low deciduous & evergreen (55) | Mean NIR (234); Ratio R/NIR (0.46); Hue-G_R_NIR (0.14); GLCM-H_NIR (0.08) |
| Plant Phenology (55) | 0.17; 0.25 | Plant phenology (55) | 0.12; 0.21 |
| nDSM (55) | 5 m | nDSM (55) | 5 m |
| Scheme a- ALOS-2 Imagery | Scheme b- SPOT-7 Imagery | Scheme c- Pleiades-1A Imagery | |||||||||||||||||
| OA | 71.13 | 75.38 | 79.25 | ||||||||||||||||
| Kappa | 0.634 | 0.688 | 0.735 | ||||||||||||||||
| Reference | |||||||||||||||||||
| HD | HE | LD | LE | NV | UA | HD | HE | LD | LE | NV | UA | HD | HE | LD | LE | NV | UA | ||
| Classified | HD | 152 | 11 | 19 | 16 | 7 | 74.15 | 163 | 11 | 15 | 11 | 8 | 78.37 | 171 | 8 | 13 | 12 | 7 | 81.04 |
| HE | 17 | 60 | 13 | 10 | 3 | 58.25 | 13 | 69 | 14 | 9 | 4 | 63.3 | 11 | 73 | 11 | 7 | 2 | 70.19 | |
| LD | 22 | 9 | 82 | 13 | 5 | 62.6 | 19 | 7 | 88 | 12 | 6 | 66.67 | 15 | 9 | 97 | 9 | 5 | 71.85 | |
| LE | 16 | 12 | 12 | 131 | 5 | 74.29 | 15 | 8 | 10 | 138 | 1 | 80.23 | 13 | 7 | 7 | 145 | 3 | 82.86 | |
| OT | 14 | 9 | 10 | 8 | 144 | 77.84 | 11 | 6 | 9 | 8 | 145 | 81.01 | 11 | 4 | 8 | 5 | 147 | 84.57 | |
| PA | 68.78 | 59.41 | 60.29 | 73.6 | 87.8 | 73.76 | 68.32 | 64.71 | 77.53 | 88.41 | 77.38 | 72.28 | 71.32 | 81.46 | 90.24 | ||||
| Scheme d- Multi-Temporal Pleiades Imagery | Scheme e- Stereo Pleiades Imagery | Scheme f- Multi-Temporal Stereo Pleiades Imagery | |||||||||||||||||
| OA | 84.5 | 86.13 | 92.75 | ||||||||||||||||
| Kappa | 0.803 | 0.822 | 0.908 | ||||||||||||||||
| Reference | |||||||||||||||||||
| HD | HE | LD | LE | NV | UA | HD | HE | LD | LE | NV | UA | HD | HE | LD | LE | NV | UA | ||
| Classified | HD | 184 | 5 | 6 | 11 | 6 | 86.79 | 188 | 12 | 6 | 7 | 4 | 87.50 | 203 | 3 | 6 | 3 | 3 | 93.12 |
| HE | 7 | 81 | 10 | 5 | 1 | 77.88 | 15 | 84 | 3 | 3 | 1 | 80.77 | 7 | 95 | 2 | 2 | 0 | 89.62 | |
| LD | 15 | 6 | 107 | 4 | 3 | 79.26 | 5 | 2 | 111 | 13 | 4 | 83.46 | 5 | 1 | 121 | 4 | 2 | 90.98 | |
| LE | 9 | 4 | 8 | 150 | 0 | 87.72 | 6 | 3 | 12 | 152 | 2 | 87.36 | 3 | 1 | 5 | 166 | 2 | 93.79 | |
| OT | 6 | 5 | 5 | 8 | 154 | 86.52 | 8 | 3 | 6 | 3 | 153 | 88.44 | 3 | 1 | 2 | 3 | 157 | 94.58 | |
| PA | 83.26 | 80.20 | 78.68 | 84.27 | 93.90 | 85.52 | 83.17 | 81.62 | 85.39 | 93.29 | 91.86 | 94.06 | 88.97 | 93.26 | 95.73 | ||||
| Greenspace Type | Scheme a | Scheme b | Scheme c | Scheme d | Scheme e | Scheme f |
|---|---|---|---|---|---|---|
| Greenspace | −12.06 ± 5.25 | −9.72 ± 4.47 | −7.63 ± 4.36 | −5.44 ± 2.58 | −5.29 ± 2.45 | −3.53 ± 2.12 |
| High Deciduous | −18.55 ± 7.31 | −16.87 ± 5.52 | −14.18 ± 5.89 | −11.32 ± 4.57 | −10.15 ± 3.96 | −7.06 ± 2.85 |
| High Evergreen | 23.36 ± 8.39 | 20.08 ± 7.12 | 17.57 ± 7.24 | 14.34 ± 5.63 | 13.48 ± 5.02 | 10.63 ± 3.79 |
| Low Deciduous | −25.19 ± 9.75 | −22.43 ± 7.65 | −19.83 ± 8.09 | −15.92 ± 5.18 | −15.36 ± 4.97 | −11.19 ± 4.01 |
| Low Evergreen | 15.12 ± 6.36 | 12.79 ± 5.21 | 11.37 ± 4.74 | 8.16 ± 3.86 | 7.53 ± 3.03 | 5.22 ± 2.17 |
| TA (ha) | PC (%) | PD (/ha) | ED (/ha) | LPI (%) | MPS (m2) | ||
|---|---|---|---|---|---|---|---|
| Garden | Green space | 1881.74 | 70.98 | 227.86 | 1402.33 | 78.45 | 92.93 |
| High evergreen | 174.31 | 6.93 | 102.91 | 441.43 | 7.27 | 12.24 | |
| High deciduous | 694.12 | 23.46 | 637.28 | 1860.27 | 26.42 | 29.81 | |
| Low evergreen | 859.97 | 35.38 | 298.03 | 1103.72 | 40.13 | 55.58 | |
| Low deciduous | 153.34 | 5.21 | 79.45 | 386.09 | 4.63 | 17.11 | |
| Urban garden | Green space | 122.03 | 56.46 | 425.32 | 2049.57 | 60.69 | 21.35 |
| High evergreen | 19.14 | 8.56 | 152.28 | 461.68 | 7.55 | 8.72 | |
| High deciduous | 47.65 | 20.43 | 855.94 | 2387.14 | 23.61 | 15.19 | |
| Low evergreen | 42.84 | 22.29 | 573.6 | 1778.39 | 25.83 | 23.08 | |
| Low deciduous | 12.40 | 5.18 | 130.46 | 424.91 | 3.74 | 7.43 | |
| Suburban garden | Green space | 926.18 | 70.85 | 146.83 | 1236.06 | 75.41 | 86.16 |
| High evergreen | 89.46 | 7.75 | 108.43 | 463.04 | 6.48 | 11.36 | |
| High deciduous | 318.59 | 25.79 | 542.74 | 1296.98 | 25.35 | 25.42 | |
| Low evergreen | 441.11 | 31.51 | 314.56 | 982.95 | 38.52 | 44.91 | |
| Low deciduous | 77.02 | 5.8 | 89.77 | 372.63 | 5.06 | 14.28 | |
| Exurban garden | Green space | 833.54 | 82.43 | 65.09 | 591.15 | 94.37 | 153.48 |
| High evergreen | 67.93 | 6.67 | 59.58 | 437.28 | 7.96 | 16.7 | |
| High deciduous | 295.54 | 29.41 | 251.34 | 883.51 | 29.13 | 41.05 | |
| Low evergreen | 406.62 | 40.12 | 115.67 | 601.73 | 51.47 | 73.19 | |
| Low deciduous | 63.45 | 6.23 | 50.02 | 359.42 | 5.85 | 23.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Van der Linden, S.; Tian, Y.; Van Valckenborgh, J.; Strosse, V.; Somers, B. Characterizing Garden Greenspace in a Medieval European City: Added Values of Spatial Resolution and Multi-Temporal Stereo Imagery. Remote Sens. 2022, 14, 1169. https://doi.org/10.3390/rs14051169
Yan J, Van der Linden S, Tian Y, Van Valckenborgh J, Strosse V, Somers B. Characterizing Garden Greenspace in a Medieval European City: Added Values of Spatial Resolution and Multi-Temporal Stereo Imagery. Remote Sensing. 2022; 14(5):1169. https://doi.org/10.3390/rs14051169
Chicago/Turabian StyleYan, Jingli, Stijn Van der Linden, Yunyu Tian, Jo Van Valckenborgh, Veerle Strosse, and Ben Somers. 2022. "Characterizing Garden Greenspace in a Medieval European City: Added Values of Spatial Resolution and Multi-Temporal Stereo Imagery" Remote Sensing 14, no. 5: 1169. https://doi.org/10.3390/rs14051169