Evaluation of Atmospheric Correction Algorithms over Spanish Inland Waters for Sentinel-2 Multi Spectral Imagery Data


 ,
,  and
and
Abstract
:
1. Introduction
2. Study Area, Data and Approaches
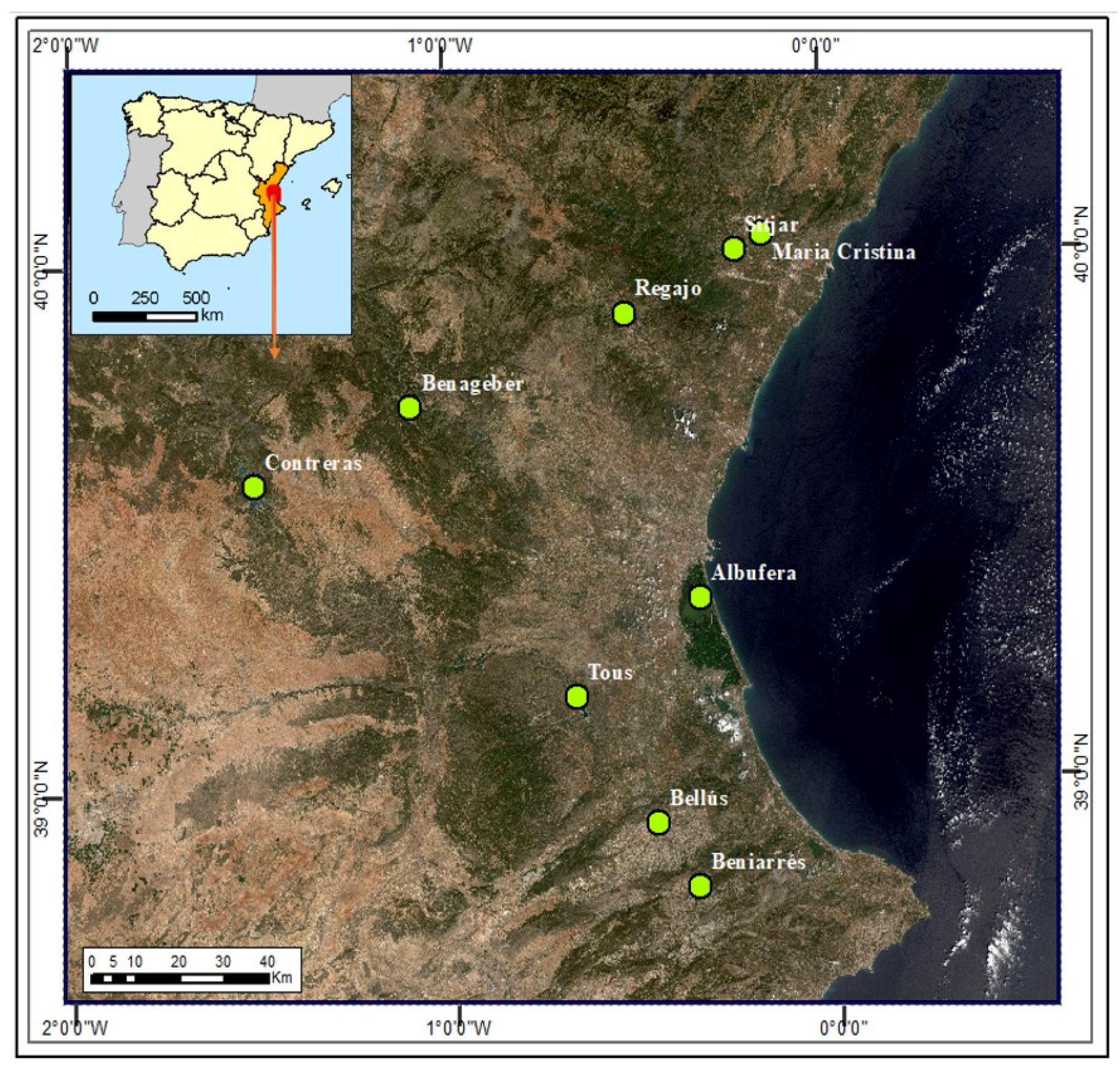
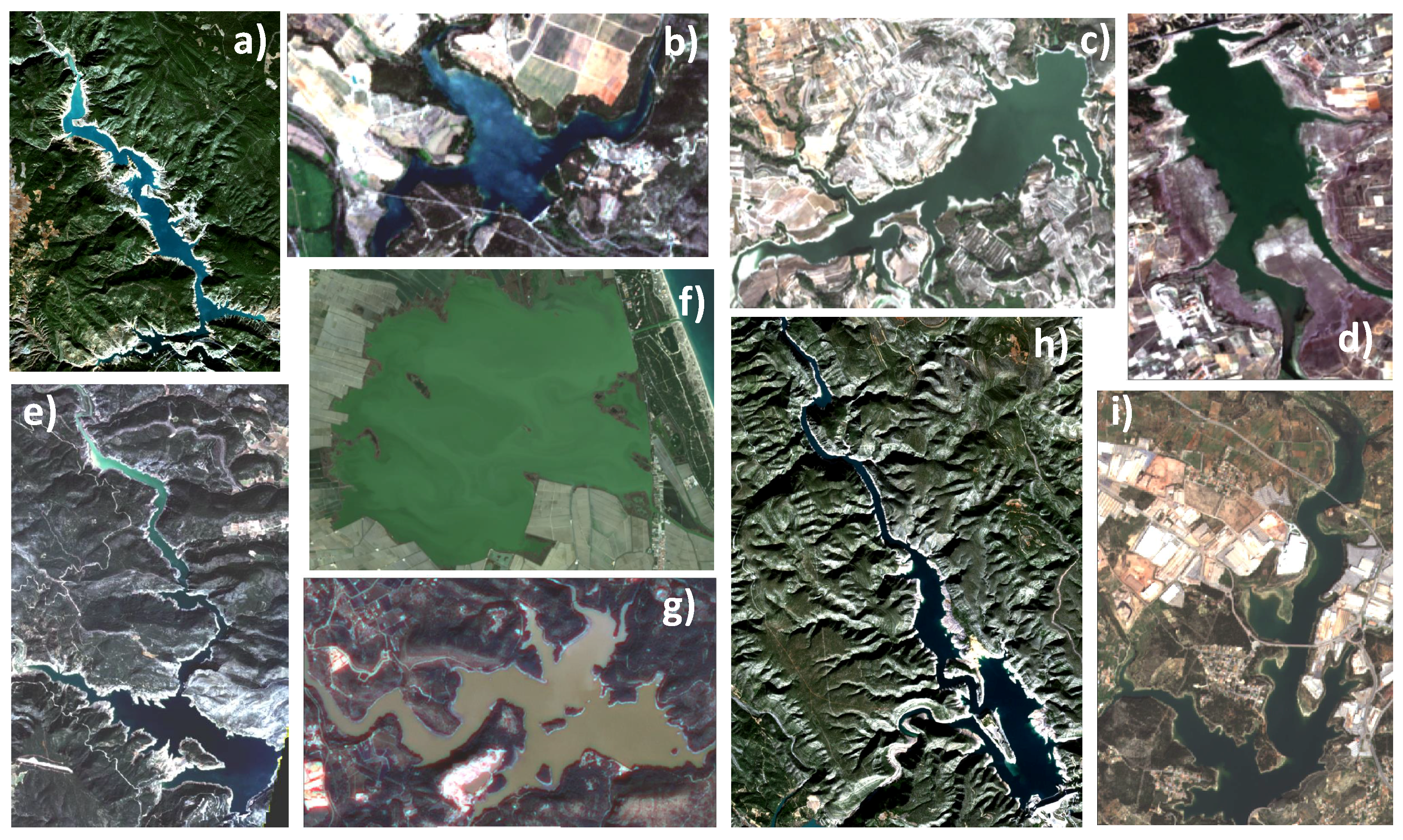
2.1. Study Area
2.2. Satellite Data
2.3. Above-Water Radiometry Measured In Situ
2.4. Atmospheric Correction Approaches
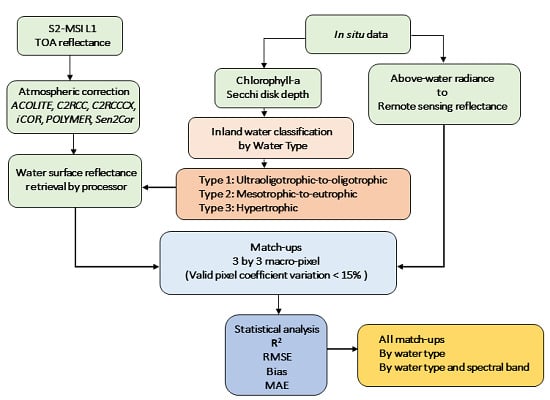
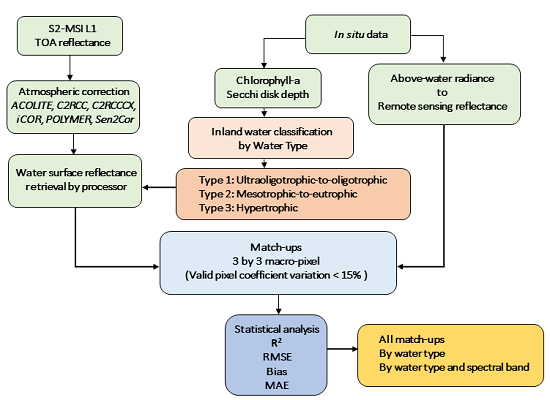
3. Preparation of Match-Ups
4. Results
4.1. Results with All the Match-Ups
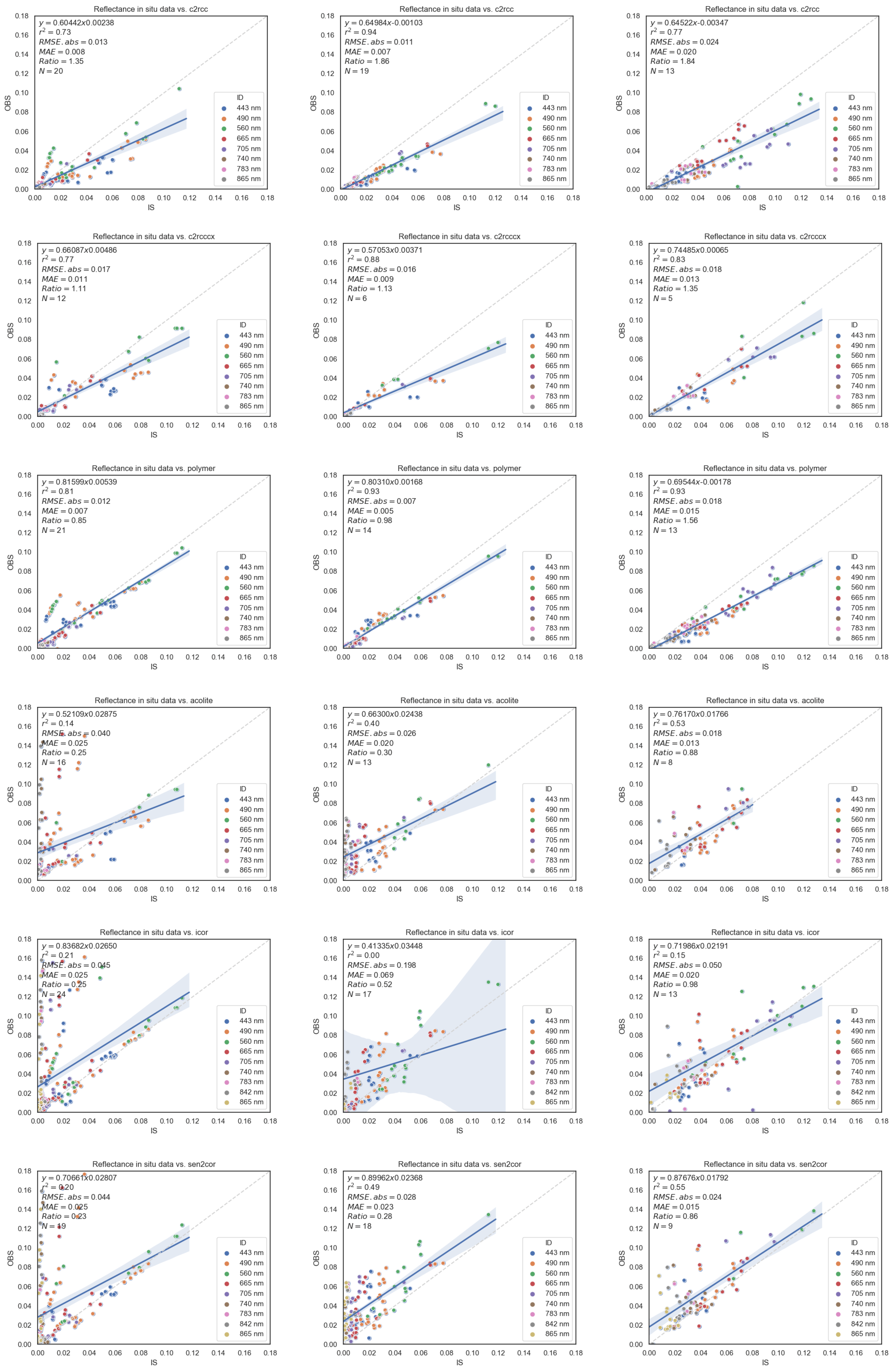
4.2. Results with All the Match-Ups by Water Type
4.3. Results with All the Match-Ups by Water Type and Spectral Band
4.4. Results Applying Quality Flags
5. Discussion
5.1. Polymer, C2RCC and C2RCCCX
5.2. ACOLITE, Sen2Cor and iCOR
5.3. Other Considerations
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IOCCG. Atmospheric Correction for Remotely-Sensed Ocean Colour Products; Wang, M., Ed.; Technical Report; IOCCG: Dartmouth, NS, Canada, 2010. [Google Scholar]
- Vermote, F.; Kotchenova, S. Atmospheric correction for the monitoring of land surfaces. J. Geophys. Res.-Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Doxani, G.; Vermote, E.; Roger, J.C.; Gascon, F.; Adriensen, S.; Frantz, D.; Hagolle, O.; Hollstein, A.; Kirches, G.; Li, F.; et al. Atmospheric Correction Inter-Comparison Exercise. Remote Sens. 2018, 10, 352. [Google Scholar] [CrossRef]
- Prieur, L.; Sathyendranath, S. An optical classification of coastal and oceanic waters based on the specific spectral absorption curves of phytoplankton pigments, dissolved organic matter, and other particulate materials. Limnol. Oeanogr. 1981, 26, 671–689. [Google Scholar] [CrossRef]
- Wang, M. Atmospheric correction of Ocean Color RS observations. In Proceedings of the IOCCG Summer Lecture Series, Villefranche-sur-Mer, France, 21 July–2 August 2014; pp. 1–58. [Google Scholar]
- Gordon, H.R.; Wang, M. Retrieval of water-leaving radiance and aerosol optical thickness over the oceans with SeaWiFS: A preliminary algorithm. Appl. Opt. 1994, 33, 443–452. [Google Scholar] [CrossRef] [PubMed]
- Mograne, M.A.; Jamet, C.; Loisel, H.; Vantrepotte, V.; Mériaux, X.; Cauvin, A. Evaluation of Five Atmospheric Correction Algorithms over French Optically-Complex Waters for the Sentinel-3A OLCI Ocean Color Sensor. Remote Sens. 2019, 11, 668. [Google Scholar] [CrossRef]
- Soria-Perpinya, X.; Urrego, P.; Pereira-Sandoval, M.; Ruíz-Verdú, A.; Peña, R.; Soria, J.; Delegido, J.; Vicente, E.; Moreno, J. Monitoring the ecological state of a hypertrophic lake (Albufera of València, Spain) using multitemporal Sentinel-2 images. Limnetica 2019, 38, 457–469. [Google Scholar]
- Pereira-Sandoval, M.; Urrego, P.; Ruíz-Verdú, A.; Delegido, J.; Soria, J.; Perpinyà, J.; Vicente, E.; Moreno, J. Calibration and validation of algorithms for the estimation of the chlorophyll-a concentration and Secchi depth in inland waters with Sentinel-2. Limnetica 2019, 38, 471–487. [Google Scholar]
- Aronow, S. Shoreline development ratio. In Beaches and Coastal Geology; Springer: Boston, MA, USA, 1982; pp. 754–755. [Google Scholar]
- Copernicus-ESA. Copernicus Open Access Hub. Available online: https://scihub.copernicus.eu/dhus/#/home (accessed on 1 December 2018).
- Warren, M.; Simis, S.; Martinez-Vicente, V.; Poser, K.; Bresciani, M.; Alikas, K.; Spyrakos, E.; Giardino, C.; Ansper, A. Assessment of atmospheric correction algorithms for the Sentinel-2A MultiSpectral Imager over coastal and inland waters. Remote Sens. Environ. 2019, 225, 267–289. [Google Scholar] [CrossRef]
- Deliverable 3.2: Atmospheric Correction Harmonisation—GLaSS Project. Available online: https://www.glass-project.eu/assets/Deliverables/GLaSS-D3.2.pdf (accessed on 1 December 2018).
- Qin, P.; Simis, S.; Gavin, T. Radiometric validation of atmospheric correction for MERIS in the Baltic Sea based on continuous observations from ships and AERONET-OC. Remote Sens. Environ. 2017, 200, 263–280. [Google Scholar] [CrossRef] [Green Version]
- Souza Martins, V.; Faria Barbosa, C.; Sander de Carvalho, L.; Schaffer Ferreira Jorge, D.; Lucia de Lobo, F.; de Moraes Novo, E.M.L. Assesment of atmospheric correction methods for Sentinel-2 MSI images applied to Amazon floodplain lakes. Remote Sens. 2017, 9, 322. [Google Scholar]
- Shoaf, W.; Lium, B. Improved extraction of chlorophyll a and b from algae using dimethyl sulfoxide. Limnol. Oeanogr. 1976, 21, 926–928. [Google Scholar] [CrossRef]
- Jeffrey, S.T.; Humphrey, G.F. New spectrophotometric equations for deter-mining chlorophylls a, b, c1 and c2 in higher plants, algae and natural phytoplankton. Biochem. Physiol. Pflanz. 1975, 167, 191–194. [Google Scholar] [CrossRef]
- Casper, H. Eutrophication of Waters, Monitoring, Assessment and Control. Int. Rev. Hydrobiol. 1984, 69, 200. [Google Scholar]
- Kuhn, C.; de Matos Valerio, A.; Ward, N.; Loken, L.; Sawakuchi, H.O.; Kampel, M.; Richey, J.; Stadler, P.; Crawford, J.; Striegl, R.; et al. Performance of Landsat-8 and Sentinel-2 surface reflectance products for river remote sensing retrievals of chlorophyll-a and turbidity. Remote Sens. Environ. 2019, 224, 104–118. [Google Scholar] [CrossRef] [Green Version]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef] [PubMed]
- Zibordi, G.; Melin, F.; Berthon, J. A regional assesment of OLCI data products. IEEE Geosci. Remote Sens. 2018, 15, 1490–1494. [Google Scholar] [CrossRef]
- Mueller, J.L.; Morel, A.; Frouin, R.; Davis, C.; Arnone, R.; Carder, K.; Lee, Z.; Steward, R.; Hooker, S.; Mobley, C.; et al. Ocean Optics Protocols For Satellite Ocean Color Sensor Validation, Revision 4, Volume III: Radiometric Measurements and Data Analysis Protocols; Technical Report; NASA: Washington, DC, USA, 2003.
- Mobley, C.D. Polarized reflectance and transmittance properties of wind-blown sea surfaces. Appl. Opt. 2015, 54, 4828–4849. [Google Scholar] [CrossRef] [PubMed]
- ESA. Spectral Response Function v2.0. Available online: https://earth.esa.int/web/sentinel/user-guides/sentinel-2-msi/document-library/-/asset_publisher/Wk0TKajiISaR/content/sentinel-2a-spectral-responses (accessed on 1 February 2018).
- RBINS. Acolite Atmospheric Correction Processor. Available online: https://odnature.naturalsciences.be/remsem/software-and-data/acolite (accessed on 1 December 2018).
- Vanhellemont, K.; Ruddick, K. Turbid wakes associated with offshore wind turbines observed with Landsat 8. Remote Sens. Environ. 2014, 145, 105–115. [Google Scholar] [CrossRef] [Green Version]
- Vanhellemont, K.; Ruddick, K. Advantages of high quality SWIR bands for ocean colour processing: Examples from Landsat-8. Remote Sens. Environ. 2015, 161, 89–106. [Google Scholar] [CrossRef] [Green Version]
- Vanhellemont, K.; Ruddick, K. Acolite for Sentinel-2: Aquatic applications of MSI imagery. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; pp. 1–8. [Google Scholar]
- Vanhellemont, K. Adaptation of the dark spectrum fitting atmospheric correction for aquatic applications of the Landsat and Sentinel-2 archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Vanhellemont, K.; Ruddick, K. Atmospheric correction of metre-scale optical satellite data for inland and coastal water applications. Remote Sens. Environ. 2018, 216, 586–597. [Google Scholar] [CrossRef]
- Doerffer, R.; Schiller, H. The MERIS Case 2 water algorithm. Int. J. Remote Sens. 2007, 28, 517–535. [Google Scholar] [CrossRef]
- Brockmann, C.; Doerffer, R.; Peters, M.; Stelzer, K.; Embacher, S.; Ruescas, A. Evolution of the C2RCC neural network for Sentinel 2 and 3 for the retrieval of ocean colour products in normal and extreme optically complex waters. In Proceedings of the Living Planet Symposium 2016, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Chami, M.; Dilligeard, E. Radiative transfer model for the computation of radiance and polarization in an ocean-atmosphere system: Polarization properties of suspended matter for remote sensing. Appl. Opt. 2001, 40, 2398–2416. [Google Scholar] [CrossRef] [PubMed]
- ESA. SNAP. Available online: http://step.esa.int/main/download/ (accessed on 1 December 2018).
- Vito. iCOR. Available online: https://blog.vito.be/remotesensing/icor_available (accessed on 1 December 2018).
- Sterckx, S.; Knaeps, S.; Kratzer, S.; Ruddick, K. SImilarity Environment correction (SIMEC) applied to MERIS data over inland and coastal waters. Remote Sens. Environ. 2015, 157, 96–110. [Google Scholar] [CrossRef]
- Guanter, L.; González-Sanpedro, M.; Moreno, J. A method for the atmospheric correction of ENVISAT/MERIS data over land targets. Int. J. Remote Sens. 2007, 28, 709–728. [Google Scholar] [CrossRef]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Bernstein, L.S.; Muratov, L.; Lee, J.; Fox, M.; Adler-Golden, S.M.; Chetwynd, J.H., Jr.; Hoke, M.L.; et al. MODTRAN5: 2006 update. Proc. SPIE 2006, 6233, 62331F. [Google Scholar]
- HYGEOS. Polymer. Available online: https://www.hygeos.com/polymer (accessed on 1 December 2018).
- Sathyendranath, S.; Grant, M.; Brewin, R.; Brockmann, C.; Brotas, V.; Chuprin, A.; Doerffer, R.; Dowell, M.; Farman, A.; Groom, S.; et al. ESA Ocean Colour Climate Change Initiative (Ocean Colour cci): Global Dataset of Inherent Optical Properties (IOP) Gridded on a Sinusoidal Projection, Version 3.1; ESA: Paris, France, 2018. [Google Scholar]
- ESA. SNAP-Sen2Cor. Available online: http://step.esa.int/main/third-party-plugins-2/sen2cor/ (accessed on 1 December 2018).
- Kaufman, Y.; Sendra, C. Algorithm for automatic atmospheric corrections to visible and near-IR satellite imagery. Int. J. Remote Sens. 1988, 9, 1357–1381. [Google Scholar] [CrossRef]
- Ouaidrari, H.; Vermote, E. Operational atmospheric correction of Landsat TM data. Remote Sens. Environ. 1997, 70, 4–15. [Google Scholar] [CrossRef]
- Gao, B.C.; Montes, M.J.; Davis, C.O.; Goetz, A.F. Atmospheric correction algorithms for hyper-spectral remote sensing data of land and ocean. Remote Sens. Environ. 2009, 113, 17–24. [Google Scholar] [CrossRef]
- Bailey, S.W.; Werdell, P.J. A multi-sensor approach for the on-orbit validation of ocean color satellite data products. Remote Sens. Environ. 2006, 102, 12–23. [Google Scholar] [CrossRef]
- Müller, D.; Krasemann, H.; Brewin, R.J.; Brockmann, C.; Deschamps, P.Y.; Doerffer, R.; Fomferra, N.; Franz, B.A.; Grant, M.G.; Groom, S.B.; et al. The Ocean Colour Climate Change Initiative: I. A methodology for assessing atmospheric correction processors based on in-situ measurements. Remote Sens. Environ. 2015, 162, 242–256. [Google Scholar] [CrossRef] [Green Version]
- Seegers, B.N.; Stumpf, R.P.; Schaeffer, B.A.; Loftin, K.A.; Werdell, P.J. Performance metrics for the assessment of satellite data products: An ocean color case study. Opt. Express 2018, 26, 7404–7422. [Google Scholar] [CrossRef] [PubMed]
- Xue, K.; Ma, R.; Wang, D.; Shen, M. Optical Classification of the Remote Sens. Reflectance and Its Application in Deriving the Specific Phytoplankton Absorption in Optically Complex Lakes. Remote Sens. 2019, 11, 184. [Google Scholar] [CrossRef]
- Bulgarelli, B.; Zibordi, G. On the detectability of adjacency effects in ocean color Remote Sens.of mid-latitude coastal environments by SeaWiFS, MODIS-A, MERIS, OLCI, OLI and MSI. Remote Sens. Environ. 2018, 209, 423–438. [Google Scholar] [CrossRef] [PubMed]
- Steinmetz, F.; Deschamps, P.Y.; Ramon, D. Atmospheric correction in presence of sunglint: Application to MERIS. Opt. Express 2011, 19, 9783–9800. [Google Scholar] [CrossRef] [PubMed]
- Steinmetz, F.; Ramon, D.; Deschamps, P. Ocean Colour Climate Change (OC CCI)-Phase One; Technical Report; ESA-ESRIN: Frascati, Italy, 2016. [Google Scholar]
- Ruescas, A.B.; Pereira-Sandoval, M.; Tenjo, C.; Ruiz-Verdú, A.; Steinmetz, F.; Keukelaere, L.D. Sentinel-2 Atmospheric Correction inter-comparison over two lakes in Spain and Peru-Bolivia. In Proceedings of the Colour and Light in the Ocean from Earth Observation (CLEO), ESA-ESRIN, Frascati, Italy, 6–8 September 2016. [Google Scholar]
- Nechad, B.; van der Zande, D.; Hieronymi, M.; Kraseman, H.; Mueller, D.; Stenimetz, F.; Tilstone, G.; Simis, S.; Brockmann, C.; Ruescas, A.; et al. C2X Product Validation Report; Technical Report; ESA: Paris, France, 2017. [Google Scholar]
- Moses, W.J.; Sterckx, S.; Montes, M.J.; Keukelaere, L.D.; Knaeps, E. Chapter 3 Atmospheric Correction for Inland Waters. In Bio-Optical Modeling and Remote Sensing of Inland Waters; Elsevier: Amsterdam, The Netherlands, 2017; pp. 69–100. [Google Scholar]
- Pahlevan, N.; Sarkar, S.; Franz, B.; Balasubramanian, S.; He, J. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- Ahmad, Z.; Franz, B.A.; McClain, C.R.; Kwiatkowska, E.J.; Werdell, J.; Shettle, E.P.; Holben, B.N. New aerosol models for the retrieval of aerosol optical thickness and normalized water-leaving radiances from the SeaWiFS and MODIS sensors over coastal regions and open oceans. Appl. Opt. 2010, 49, 5545–5560. [Google Scholar] [CrossRef] [PubMed]
- Santer, R.; Schmechtig, C. Adjacency effects on water surfaces: Primary scattering approximation and sensitivity study. Appl. Opt. 2000, 39, 361–375. [Google Scholar] [CrossRef]
- De Keukelaere, L.; Sterckx, S.; Adriaensen, S.; Knaeps, E.; Reusen, I.; Giardino, C. Atmospheric correction of Landsat-8/OLI and Sentinel-2/MSI data using iCOR algorithm: Validation for coastal and inland waters. Eur. J. Remote Sens. 2018, 51, 525–542. [Google Scholar] [CrossRef]
- Harmel, T.; Chami, M.; Tormos, T.; Reynaud, N.; Danis, P. Sunglint correction of the Multi-Spectral Instrument (MSI)-SENTINEL-2 imagery over inland and sea waters from SWIR bands. Remote Sens. Environ. 2018, 204, 308–321. [Google Scholar] [CrossRef]
- Matthews, M.W. A current review of empirical procedures of remote sensing in inland and near-coastal transitional waters. Int. J. Remote Sens. 2011, 32, 6855–6899. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reservoir | Surface | Distance to Sea | Meters above | Shoreline Development |
|---|---|---|---|---|
| Lagoon or Lake | Area (km) | (km) | Mean Sea Level | Ratio (Index) |
| Albufera | 22 | 1.3 | 0 | 1.4 |
| Bellús | 8 | 31 | 159 | 1.8 |
| Benagéber | 12.06 | 78 | 530 | 4.1 |
| Beniarrés | 2.6 | 30 | 320 | 3.2 |
| Contreras | 27.1 | 103 | 670 | 6 |
| M Cristina | 3.25 | 17 | 138 | 2.9 |
| Regajo | 0.83 | 41 | 406 | 3.2 |
| Sitjar | 3.17 | 22 | 168 | 3.1 |
| Tous | 9.8 | 39 | 163 | 4.5 |
| In Situ | Number | Minimum | Maximum | Standard |
|---|---|---|---|---|
| Measured Parameter | of Samples | Value | Value | Deviation |
| Chl-a (mg/m) | 99 | 0.54 | 169 | 48.76 |
| (m) | 74 | 0.25 | 10 | 2.79 |
| Water Type | Description | Chl-a (mg/m) | Secchi (m) |
|---|---|---|---|
| Type 1 | Ultraoligotrophic-to-oligotrophic | Chl-a < 2.5 | > 3 |
| Type 2 | Mesotrophic-to-eutrophic | 2.5 < Chl-a < 25 | 0.7 3 |
| Type 3 | Hypertrophic | Chl-a > 25 | < 0.7 |
| Reservoir | [Chl-a] | Date | Water | |
|---|---|---|---|---|
| Lagoon or Lake | (mg/m) | (m) | (dd-mm-yyyy) | Type |
| Albufera | 31.8–54.2 | 0.3 | 05-08-2015 | 3 |
| Albufera | 52.9–58.3 | 0.3 | 27-08-2015 | 3 |
| Albufera | 93.3–169.1 | 0.3 | 30-11-2015 | 3 |
| Albufera | 25–138.2 | 0.3–0.4 | 12-03-2016 | 3 |
| Albufera | 78.1–141.8 | 0.2–0.3 | 21-04-2016 | 3 |
| Albufera | 10.7–70.4 | 0.3–0.5 | 02-05-2016 | 3 |
| Tous | 1.2–3.1 | 5.8–6 | 27-12-2016 | 2 |
| Bellús | 31.8 | 1 | 16-01-2017 | 3 |
| Contreras | 0.7–2 | 1–1.3 | 08-02-2017 | 1 |
| Albufera | 39.7–64.5 | 0.2–0.3 | 07-03-2017 | 3 |
| Beniarrés | 45.4 | 0.9 | 27-03-2017 | 3 |
| Benagéber | 2.4–2.7 | 4–7.4 | 30-03-2017 | 2 |
| M Cristina | 1.3–1.4 | 5.2–5.6 | 06-04-2017 | 1 |
| Sitjar | 0.5–0.6 | 9.4–10.5 | 06-04-2017 | 1 |
| Bellús | 61.3–68 | 0.5 | 15-06-2017 | 3 |
| Regajo | 8.6–10.2 | 1.7–2 | 05-07-2017 | 3 |
| Sitjar | 0.6 | 2.7–3.1 | 23-10-2017 | 1 |
| Benagéber | 4.5–5.7 | 3.4–4.1 | 26-10-2017 | 2 |
| Beniarrés | 11.1–17.1 | 1.1–1.4 | 07-11-2017 | 3 |
| Tous | 0.6–0.7 | 7.1–9.1 | 17-11-2017 | 1 |
| Contreras | 0.8–2.4 | 4.1–5 | 30-11-2017 | 1 |
| Tous | 0.5–0.6 | 7–8.1 | 16-01-2018 | 1 |
| M Cristina | 2.7–2.9 | 0.7 | 31-01-2018 | 2 |
| Sitjar | 0.5–0.6 | 2.2–2.4 | 31-01-2018 | 1 |
| Benagéber | 2–2.4 | 4.3–5.5 | 23-02-2018 | 2 |
| Albufera | 81.6–84.5 | 0.3 | 07-03-2018 | 3 |
| Bellús | 41.5–51.5 | 0.4–0.5 | 22-03-2018 | 3 |
| Regajo | 4.5–5.5 | 3–4.2 | 11-05-2018 | 2 |
| Benagéber | 4.5–4.9 | 3.3–3.7 | 16-05-2018 | 2 |
| AC Processor | Flag | Meaning |
|---|---|---|
| C2RCC, C2RCCCX | Rtosa_OOS | The input spectrum to the atmospheric correction neural net was out of the scope of the training range and the inversion is likely to be wrong |
| Rtosa_OOR | The input spectrum to the atmospheric correction neural net out of training range | |
| Rhow_OOS | The Rhow input spectrum to the IOP neural net is probably not within the training range of the neural net and the inversion is likely to be wrong. | |
| Rhow_OOR | One of the inputs to the IOP retrieval neural net is out of training range | |
| Cloud_risk | High downwelling transmission indicates cloudy conditions | |
| Polymer | !bitmask & 1023 == 0 | invalid pixels |
| AC Processor | N Total | N Flagged |
|---|---|---|
| ACOLITE | 56 | |
| C2RCC | 53 | 43 |
| C2RCCX | 37 | 27 |
| iCOR | 60 | |
| Sen2Cor | 62 | |
| Polymer | 52 | 40 |
| Type | Band | C2RCC | C2RCCCX | Polymer | ACOLITE | iCOR | Sen2Cor | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Water | MAE | MAE | MAE | MAE | MAE | MAE | |||||||
| 443 | 0.39 | 0.015 | 0.09 | 0.022 | 0.61 | 0.011 | 0.12 | 0.018 | 0.14 | 0.019 | 0.65 | 0.010 | |
| 490 | 0.58 | 0.020 | 0.41 | 0.021 | 0.55 | 0.015 | 0.07 | 0.026 | 0.13 | 0.025 | 0.09 | 0.026 | |
| 560 | 0.75 | 0.015 | 0.71 | 0.015 | 0.78 | 0.012 | 0.29 | 0.029 | 0.36 | 0.026 | 0.34 | 0.028 | |
| 1 | 665 | 0.83 | 0.006 | 0.83 | 0.005 | 0.89 | 0.004 | 0.10 | 0.024 | 0.14 | 0.021 | 0.10 | 0.024 |
| 705 | 0.86 | 0.002 | 0.83 | 0.003 | 0.82 | 0.003 | 0.06 | 0.023 | 0.06 | 0.024 | 0.02 | 0.029 | |
| 740 | 0.70 | 0.001 | 0.70 | 0.001 | 0.64 | 0.001 | 0.04 | 0.031 | 0.05 | 0.023 | 0.02 | 0.029 | |
| 783 | 0.72 | 0.000 | 0.69 | 0.001 | 0.65 | 0.001 | 0.07 | 0.030 | 0.08 | 0.027 | 0.51 | 0.035 | |
| 842 | 0.07 | 0.030 | 0.06 | 0.033 | |||||||||
| 865 | 0.12 | 0.001 | 0.47 | 0.000 | 0.06 | 0.002 | 0.27 | 0.031 | 0.08 | 0.032 | 0.10 | 0.030 | |
| 443 | 0.72 | 0.011 | 0.11 | 0.017 | 0.61 | 0.008 | 0.21 | 0.010 | 0.20 | 0.015 | 0.10 | 0.024 | |
| 490 | 0.79 | 0.013 | 0.70 | 0.013 | 0.87 | 0.005 | 0.64 | 0.009 | 0.04 | 0.075 | 0.50 | 0.015 | |
| 560 | 0.97 | 0.018 | 0.91 | 0.012 | 0.99 | 0.007 | 0.87 | 0.009 | 0.07 | 0.077 | 0.80 | 0.016 | |
| 2 | 665 | 0.98 | 0.007 | 0.99 | 0.010 | 0.99 | 0.006 | 0.70 | 0.016 | 0.60 | 0.015 | 0.55 | 0.018 |
| 705 | 0.97 | 0.004 | 0.99 | 0.005 | 0.98 | 0.006 | 0.58 | 0.021 | 0.10 | 0.150 | 0.36 | 0.019 | |
| 740 | 0.94 | 0.001 | 0.97 | 0.001 | 0.96 | 0.001 | 0.14 | 0.027 | 0.09 | 0.087 | 0.05 | 0.024 | |
| 783 | 0.92 | 0.001 | 0.96 | 0.000 | 0.98 | 0.001 | 0.18 | 0.028 | 0.03 | 0.068 | 0.04 | 0.025 | |
| 842 | 0.10 | 0.110 | 0.10 | 0.026 | |||||||||
| 865 | 0.80 | 0.000 | 0.86 | 0.001 | 0.72 | 0.001 | 0.20 | 0.029 | 0.11 | 0.183 | 0.11 | 0.025 | |
| 443 | 0.51 | 0.015 | 0.03 | 0.018 | 0.47 | 0.015 | 0.34 | 0.008 | 0.24 | 0.011 | 0.06 | 0.014 | |
| 490 | 0.68 | 0.022 | 0.26 | 0.019 | 0.56 | 0.019 | 0.59 | 0.009 | 0.27 | 0.013 | 0.26 | 0.012 | |
| 560 | 0.68 | 0.032 | 0.61 | 0.021 | 0.90 | 0.026 | 0.82 | 0.010 | 0.46 | 0.019 | 0.51 | 0.016 | |
| 3 | 665 | 0.93 | 0.009 | 0.73 | 0.010 | 0.88 | 0.018 | 0.51 | 0.009 | 0.30 | 0.015 | 0.32 | 0.014 |
| 705 | 0.53 | 0.040 | 0.77 | 0.014 | 0.89 | 0.019 | 0.75 | 0.009 | 0.63 | 0.023 | 0.41 | 0.019 | |
| 740 | 0.33 | 0.016 | 0.63 | 0.004 | 0.88 | 0.009 | 0.12 | 0.015 | 0.00 | 0.076 | 0.04 | 0.015 | |
| 783 | 0.36 | 0.014 | 0.54 | 0.005 | 0.88 | 0.007 | 0.10 | 0.016 | 0.02 | 0.011 | 0.05 | 0.014 | |
| 842 | 0.04 | 0.014 | 0.02 | 0.015 | |||||||||
| 865 | 0.35 | 0.008 | 0.54 | 0.003 | 0.82 | 0.004 | 0.00 | 0.016 | 0.02 | 0.010 | 0.30 | 0.015 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira-Sandoval, M.; Ruescas, A.; Urrego, P.; Ruiz-Verdú, A.; Delegido, J.; Tenjo, C.; Soria-Perpinyà, X.; Vicente, E.; Soria, J.; Moreno, J. Evaluation of Atmospheric Correction Algorithms over Spanish Inland Waters for Sentinel-2 Multi Spectral Imagery Data. Remote Sens. 2019, 11, 1469. https://doi.org/10.3390/rs11121469
Pereira-Sandoval M, Ruescas A, Urrego P, Ruiz-Verdú A, Delegido J, Tenjo C, Soria-Perpinyà X, Vicente E, Soria J, Moreno J. Evaluation of Atmospheric Correction Algorithms over Spanish Inland Waters for Sentinel-2 Multi Spectral Imagery Data. Remote Sensing. 2019; 11(12):1469. https://doi.org/10.3390/rs11121469
Chicago/Turabian StylePereira-Sandoval, Marcela, Ana Ruescas, Patricia Urrego, Antonio Ruiz-Verdú, Jesús Delegido, Carolina Tenjo, Xavier Soria-Perpinyà, Eduardo Vicente, Juan Soria, and José Moreno. 2019. "Evaluation of Atmospheric Correction Algorithms over Spanish Inland Waters for Sentinel-2 Multi Spectral Imagery Data" Remote Sensing 11, no. 12: 1469. https://doi.org/10.3390/rs11121469