Method and Device Based on Multiscan for Measuring the Geometric Parameters of Objects


 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Features of Multiscan Operation According to the “Scanistor” Activation Scheme
3. Mathematical Model of a Multiscan in a Scanistor Enabling
4. The Mechanism for Generating a Video Signal from a Discrete-Continuous Multiscan Structure
- At voltage E0 = 80B·(ΔU ≥ 4U0 ≥ 0.1B), from each photodiode cell, a photodiode (inclined) corresponding to the transitional section of its I–V characteristic and non-photosensitive (horizontal) sections of the current graphs corresponding to the dividing bus are formed. The bell-shaped video signals are also formed with non-photosensitive (horizontal) sections between the adjacent video signals from each photodiode section of the cells, which corresponds to a discrete multiscan operation mode. It should be noted that for an ideal I–V, the cells’ transitional (inclined) sections of the current graphs become rectangular (described by the Heaviside function), the bell-shaped video signals are in the form of delta functions, and the sections between them are not photosensitive.
- Reducing the voltage E0 to 40B·(ΔU = 4U0 = 0.1B) reduces the non-photosensitive (horizontal) part of the current graphs to zero, which are then transformed into a straight line. The bell-shaped video signals from neighboring cells are also merged into the total video signal of a trapezoidal multiscan, which corresponds to the boundary between the discrete and analog modes.
- With a further decrease in E0 to the 20B·(ΔU ≤ 2U0 ≤ 0.05B), the current graphs do not change and are in the form of straight lines, the slopes of which are determined by the slope of the transition section of the I–V of the cell. The video signals also remain trapezoidal and their amplitude is proportional to the illumination of the photosensitive surface of the multiscan at the polling point, which corresponds to the analog mode of the multiscan operation.
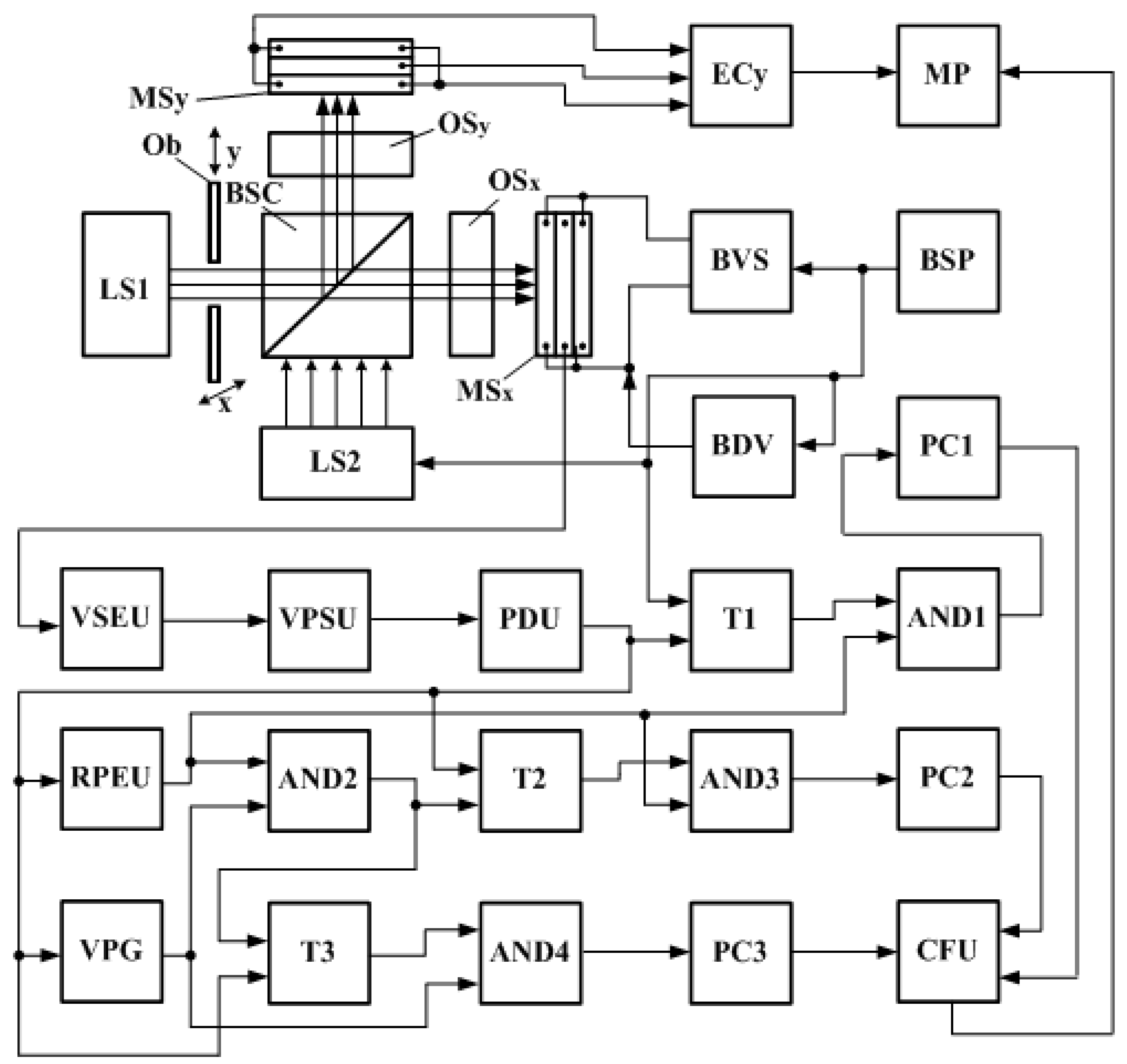
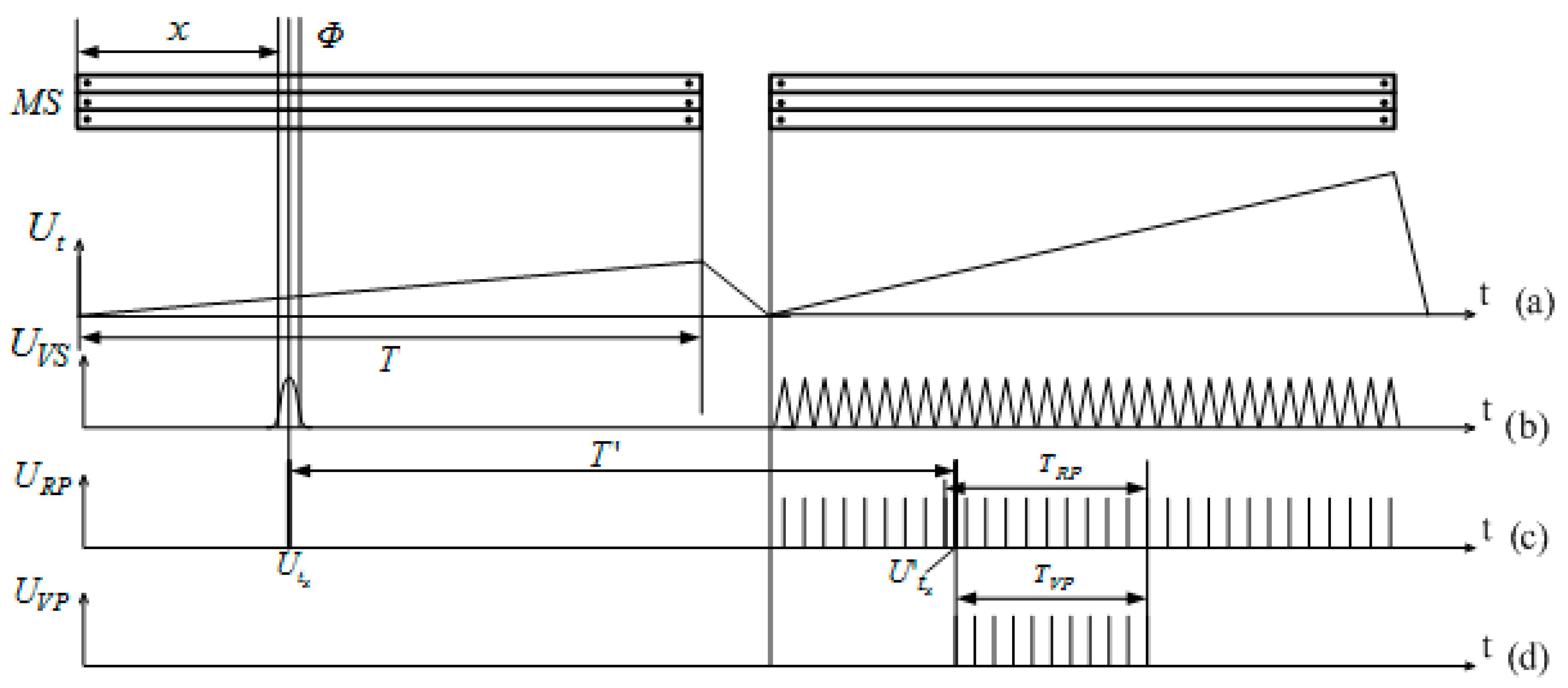
5. Discrete–Analog Vernier Method and a Device Based on It for Determining the Coordinates of Objects
6. Conclusions
- It is shown that, for the most commonly used traditional switching circuits of the multiscan “scanistor”, it is appropriate to study its discrete–continuous structure in order to achieve the potential metrological characteristics of the circuit due to its high sensitivity to small displacements of the light zone on the multiscan and the ability to generate rigid geometric raster video pulses from its discrete photodiode cells.
- A mathematical model of a multiscan with a scanistor inclusion was developed, expressions for its integral output current were obtained, and the mechanism of their formation was studied.
- A Vernier discrete analog method for measuring the parameters of the light zone on a multiscan is proposed, in which in order to increase the accuracy of the measurements, the location of the information video pulse is determined relative to the adjacent reference pulses of a rigid geometric raster due to the topology of the discrete structure of the multiscan.
- It was established that the Vernier method allows precise measurements of the coordinates, sizes, and movements of the light zones by superposition on the video raster of the n·10 reference pulses from the cells—a uniform sequence of Vernier pulses with a repetition period with the subsequent determination of the Vernier pulse that coincides with the raster pulse.
- An optical–electronic device based on a discrete–continuous multiscan was developed and implemented on the basis of the proposed Vernier method for measuring the coordinates of the light zones, which has a high sensitivity to displacements inherent in continuous structures and increased stability due to the linearity of the coordinate characteristics of discrete structures.
Author Contributions
Funding
Conflicts of Interest
References
- Sahawneh, L.R.; Wikle, J.K.; Roberts, A.K.; Spencer, J.C.; McLain, T.W.; Warnick, K.F.; Beard, R.W. Ground-based sense-and-avoid system for small unmanned aircraft. J. Aerosp. Inf. Syst. 2018, 15, 501–517. [Google Scholar] [CrossRef]
- Saha, O.; Dasgupta, P. Experience learning from basic patterns for efficient robot navigation in indoor environments. J. Intell. Robot. Syst. 2018, 92, 545–564. [Google Scholar] [CrossRef]
- Guk, E.G.; Podlaskin, B.G. Novel principle of optical signal sensing based on the creation of signal statistical estimates. In Proceedings of the IEEE Sensors 2011 Conference, Limerick, Ireland, 28–31 October 2011; pp. 436–439. [Google Scholar] [CrossRef]
- Podlaskin, B.G.; Guk, E.G.; Sukharev, A.A. Registration technique for detection of optical signal position under intense background illumination. In Proceedings of the 3rd Mediterranean Conference on Embedded Computing, MECO 2014, Budva, Montenegro, 15–19 June 2014; pp. 232–235. [Google Scholar]
- Podlaskin, B.G.; Guk, E.G. New optical sensor with continuous field of view for real-time signal processing. In Proceedings of the Mediterranean Conference on Embedded Computing, MECO 2012, Bar, Montenegro, 19–21 June 2012; pp. 104–107. [Google Scholar]
- Shelkovnikov, Y.K.; Lipanov, A.M. Theoretical Science and Technique of TV Scanistor Structures Manufacturing; Ural Division of RAN: Yekaterinburg, Russia, 2005; 133p. [Google Scholar]
- Lipanov, A.M.; Shelkovnikov, Y.K. Using the television scanistor in dual use technique. Russ. Acad. Rocket Artill. Sci. 2005, 2, 71. [Google Scholar]
- Lipanov, A.M.; Shelkovnikov, Y.K. Manufacturing technology of epitaxial scanistor sensors. Russ. Acad. Rocket Artill. Sci. 2005, 2, 75–79. [Google Scholar]
- Podlaskin, B.G.; Guk, E.G.; Nosenko, E.V. Multiskan-based double synthetic aperture for locating the illuminance boundary of a weak optical signal. Tech. Phys. Russ. J. Appl. Phys. 2002, 47, 726–730. [Google Scholar] [CrossRef]
- Podlaskin, B.G.; Guk, E.G. The multiscan position-sensitive photodetector. Meas. Tech. 2005, 48, 779–783. [Google Scholar] [CrossRef]
- Horton, J.W.; Mazza, R.V.; Dym, H. The Scanistor—A Solid-State Image Scanner. Proc. IEEE 1964, 52, 1513–1528. [Google Scholar] [CrossRef]
- Shelkovnikov, Y.K.; Kiznertsev, S.R.; Meteleva, A.A. Information-measuring systems with a differential version of the inclusion of a scanistor for studying the dynamics of fast processes. In Proceedings of the XIII International Scientific and Technical Conference Instrumentation in the XXI Century—2017. Integration of Science, Education and Production, Izhevsk, Russia, 22–24 November 2017; pp. 482–489. [Google Scholar]
- Shelkovnikov, Y.K. Improving the stability and linearity of the coordinate characteristics of scanning information-measuring systems. Intell. Sist. V Proizv. 2011, 1, 251–255. [Google Scholar]
- Podlaskin, B.G.; Guk, E.G.; Obolenskov, A.G. Increasing the resolution of a position-sensitive device based on an integral type sensor. Fundam. Probl. Electron. Instrum. 2017, 17, 846–849. [Google Scholar]
- Podlaskin, B.G.; Guk, E.G. Analysis of optical signal distortion compensation with a multiskan position-sensitive photodetector by the quasi-median technique. Tech. Phys. Russ. J. Appl. Phys. 2007, 52, 239–243. [Google Scholar] [CrossRef]
- Podlaskin, B.G.; Guk, E.G. Multiscan-based analog processor for aperture correction of the distorted optical signal median. Tech. Phys. Russ. J. Appl. Phys. 2006, 51, 1054–1059. [Google Scholar]
- Podlaskin, B.G. Spatial filtering of temporal noise with the hadamard transformation applied to a photodetector array. Tech. Phys. Russ. J. Appl. Phys. 2007, 52, 672–675. [Google Scholar] [CrossRef]
- Shelkovnikov, Y.K. Isolation of a video signal from a multiscan with a modu-lation of a scanning voltage. Polzunovsky Vestn. 2010, 2, 106–111. [Google Scholar]
- Lipanov, A.M.; Shelkovnikov, Y.K.; Osipov, N.I. Application of discrete-continuous multiscan structure in optoelectronic measuring devices. Datchiki Syst. 2003, 2, 46–49. [Google Scholar]
- Podlaskin, B.G.; Guk, E.G.; Obolenskov, A.G.; Sukharev, A.A. Suppression of the effect of high-power background illumination on the precision of determination of the optical signal coordinates. Tech. Phys. Russ. J. Appl. Phys. 2015, 60, 1384–1387. [Google Scholar] [CrossRef]
- Bozek, P.; Pivarciova, E. Registration of Holographic Images Based on Integral Transformation. Comput. Inform. 2012, 31, 1369–1383. [Google Scholar]
- Obolenskov, A.G.; Latyev, S.M.; Podlaskin, B.G.; Elena, G.G. Experimental studies of error compensation for optical signal coordinate determination by double synthesized aperture. Sci. Tech. J. Inf. Technol. Mech. Opt. 2016, 105, 757–763. [Google Scholar] [CrossRef] [Green Version]
- Obolenskov, A.G.; Latyev, S.M.; Mitrofanov, S.S.; Podlaskin, B.G. Experience in creating test-and-measurement devices based on the multiscan position-sensitive detector. J. Opt. Technol. 2016, 83, 119–122. [Google Scholar] [CrossRef]
- Lipanov, A.M.; Shelkovnikov, Y.K.; Osipov, N.I. Analysis of multiscan operation with amplitude-modulated light streams. Datchiki Syst. 2003, 10, 12–16. [Google Scholar]
- Shelkovnikov, Y.K.; Osipov, N.I.; Kiznertcev, S.R.; Podlaskin, B.G. The influence of the photoresistive effect of the multiscan resistive dividers on accuracy of measurements of geometrical parameters of objects. Intell. Sist. Proizv. 2018, 16, 57–64. [Google Scholar] [CrossRef]
- Cernecky, J.; Bozek, P.; Pivarciova, E. A new system for measuring the deflection of the beam with the support of digital holographic interferometry. J. Electr. Eng. 2015, 66, 53–56. [Google Scholar]
- Shelkovnikov, Y.K.; Osipov, N.I.; Kiznertcev, S.R.; Meteleva, A.A. Analysis of influence of kinetics of the TV multiscan photocurrent on the error of measuring the coordinates and sizes of light zones. Bull. Kalashnikov ISTU 2019, 22, 89–99. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alies, M.Y.; Shelkovnikov, Y.K.; Sága, M.; Vaško, M.; Kuric, I.; Shelkovnikov, E.Y.; Korshunov, A.I.; Meteleva, A.A. Method and Device Based on Multiscan for Measuring the Geometric Parameters of Objects. Processes 2021, 9, 24. https://doi.org/10.3390/pr9010024
Alies MY, Shelkovnikov YK, Sága M, Vaško M, Kuric I, Shelkovnikov EY, Korshunov AI, Meteleva AA. Method and Device Based on Multiscan for Measuring the Geometric Parameters of Objects. Processes. 2021; 9(1):24. https://doi.org/10.3390/pr9010024
Chicago/Turabian StyleAlies, Michael Yurievich, Yuriy Konstantinovich Shelkovnikov, Milan Sága, Milan Vaško, Ivan Kuric, Evgeny Yurievich Shelkovnikov, Aleksandr Ivanovich Korshunov, and Anastasia Alekseevna Meteleva. 2021. "Method and Device Based on Multiscan for Measuring the Geometric Parameters of Objects" Processes 9, no. 1: 24. https://doi.org/10.3390/pr9010024