

Recent Progress of Bioinspired Triboelectric Nanogenerators for Electronic Skins and Human–Machine Interaction

Abstract
:1. Introduction
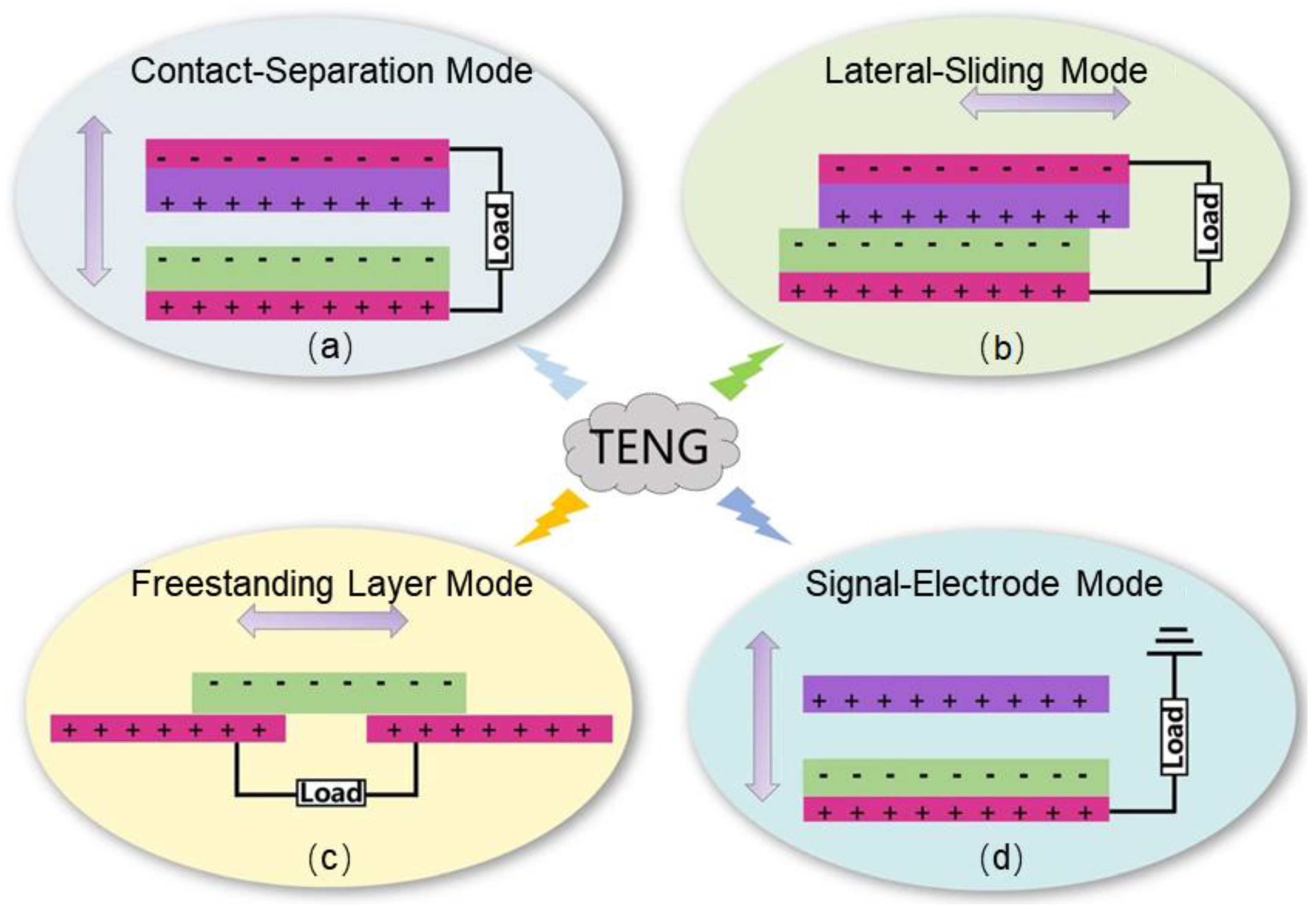
2. Four Distinct Working Modes of TENGs
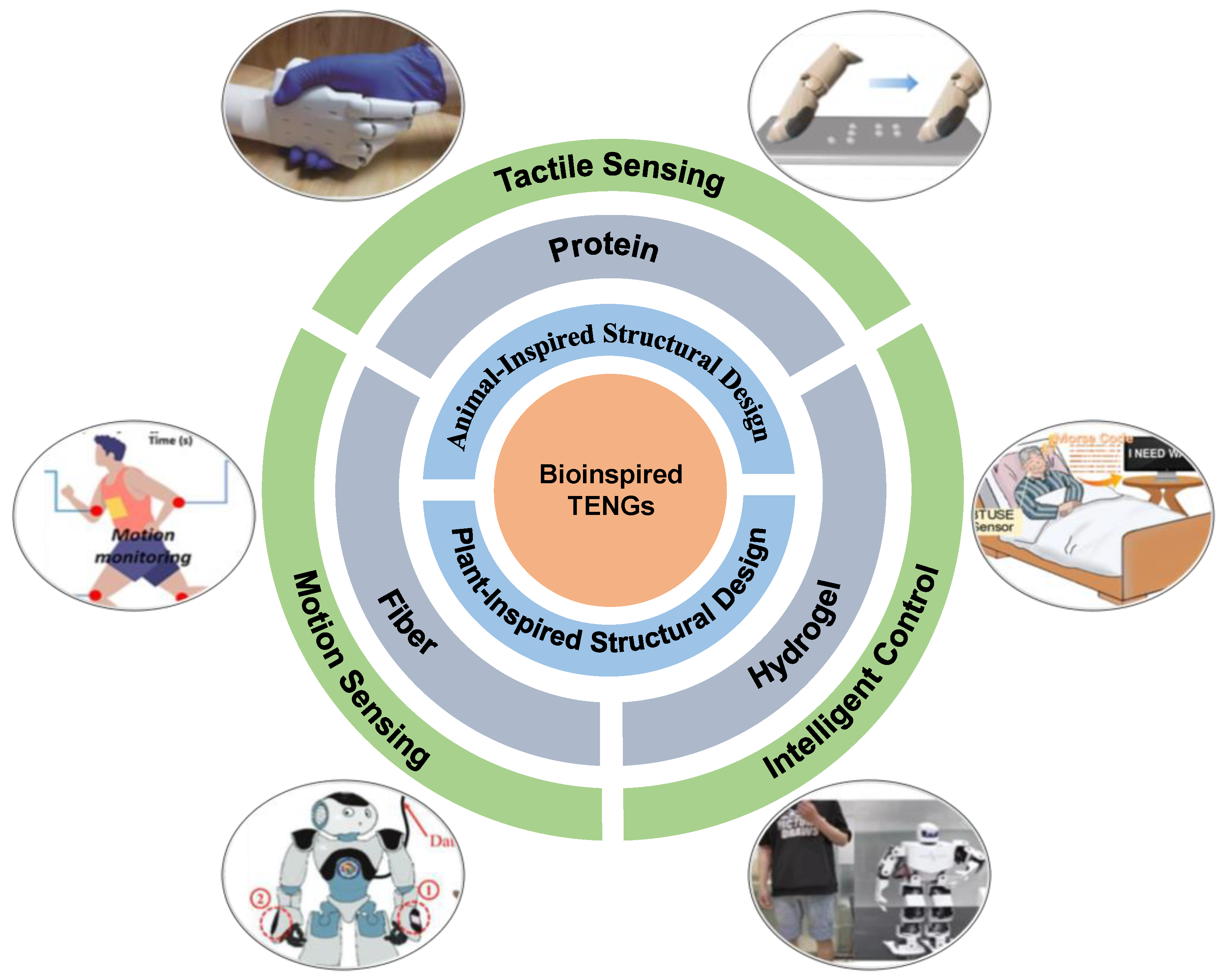
3. Structurally Biomimetic TENGs
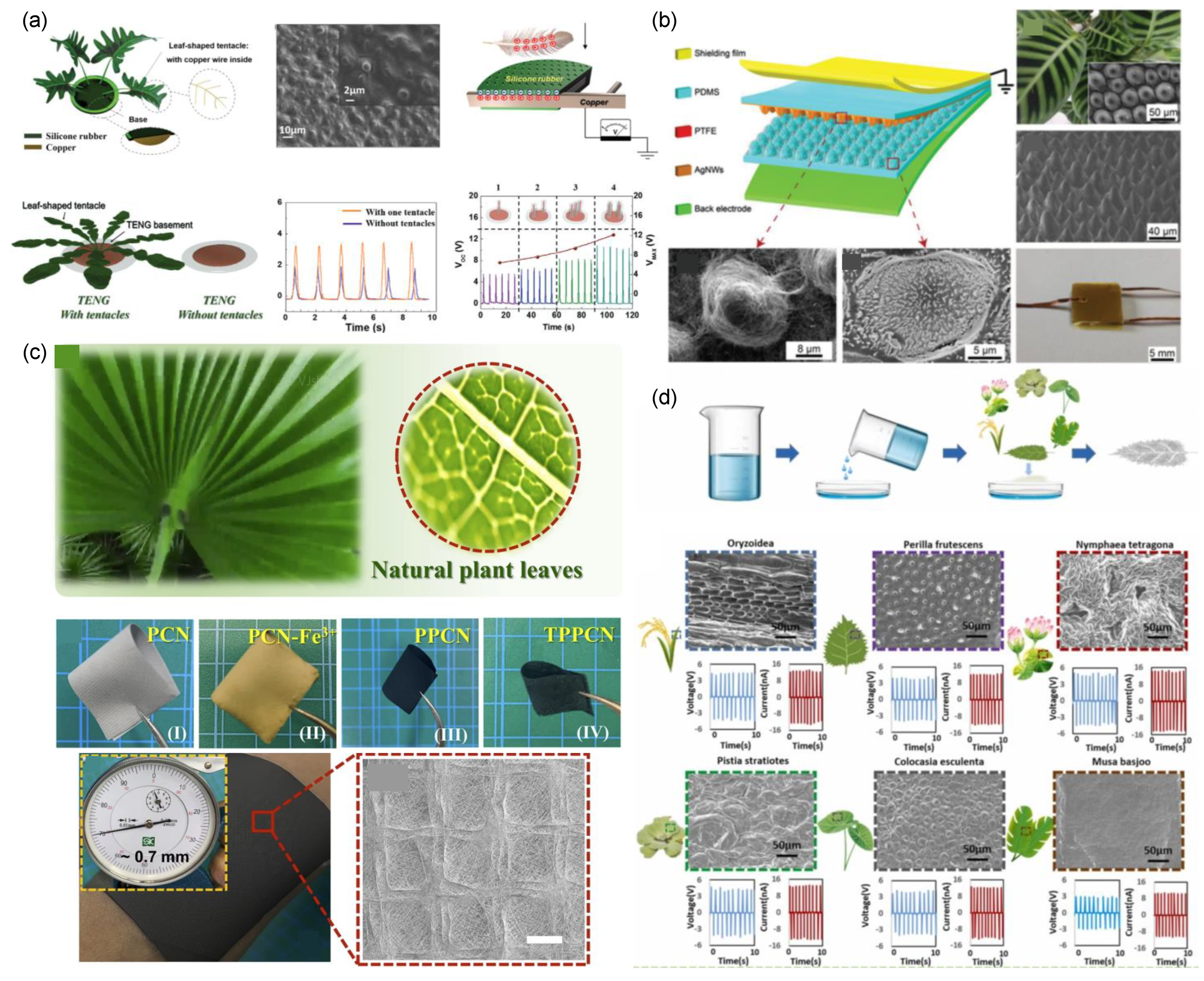
3.1. Plant-Inspired Structural Design
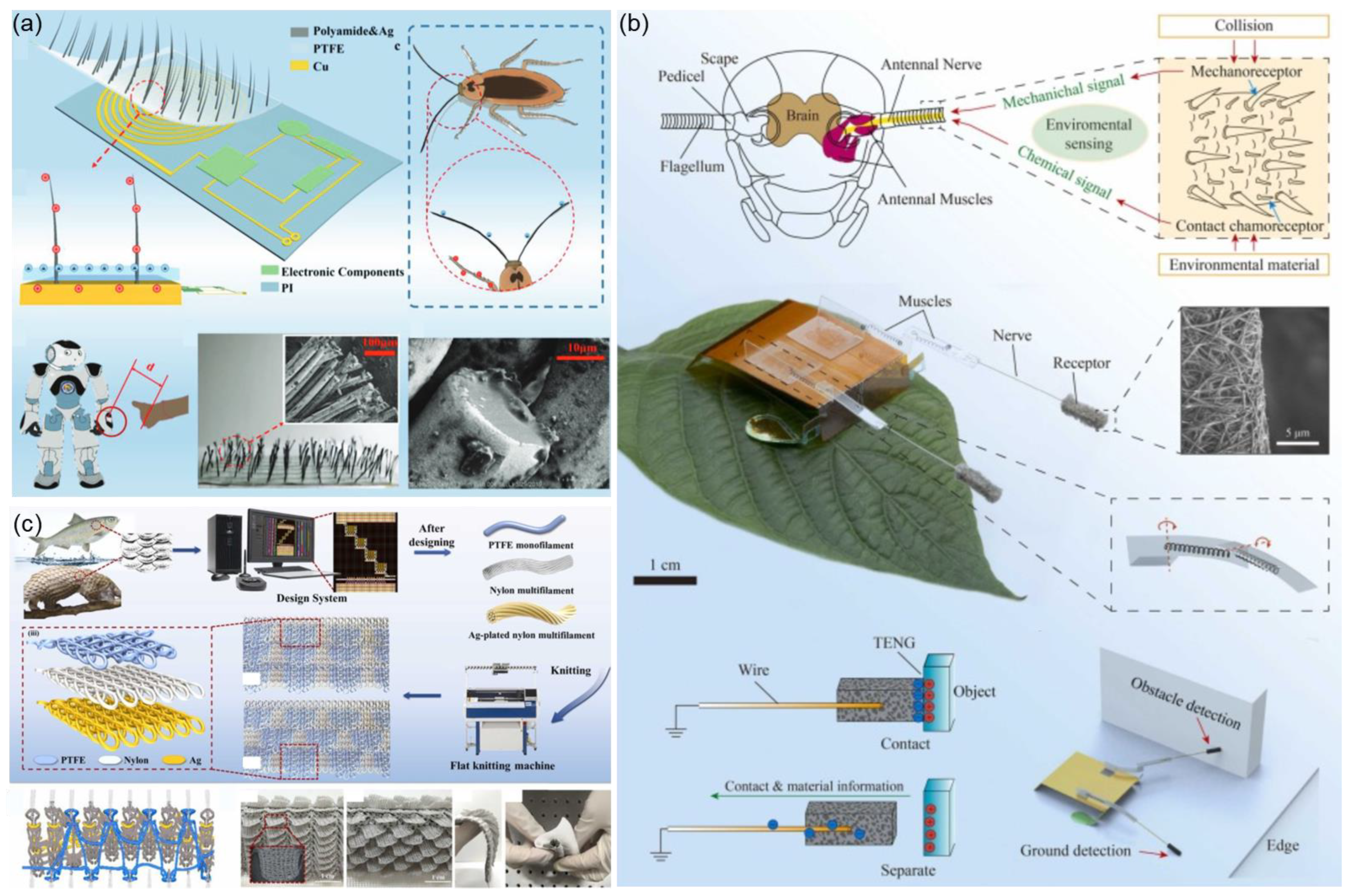
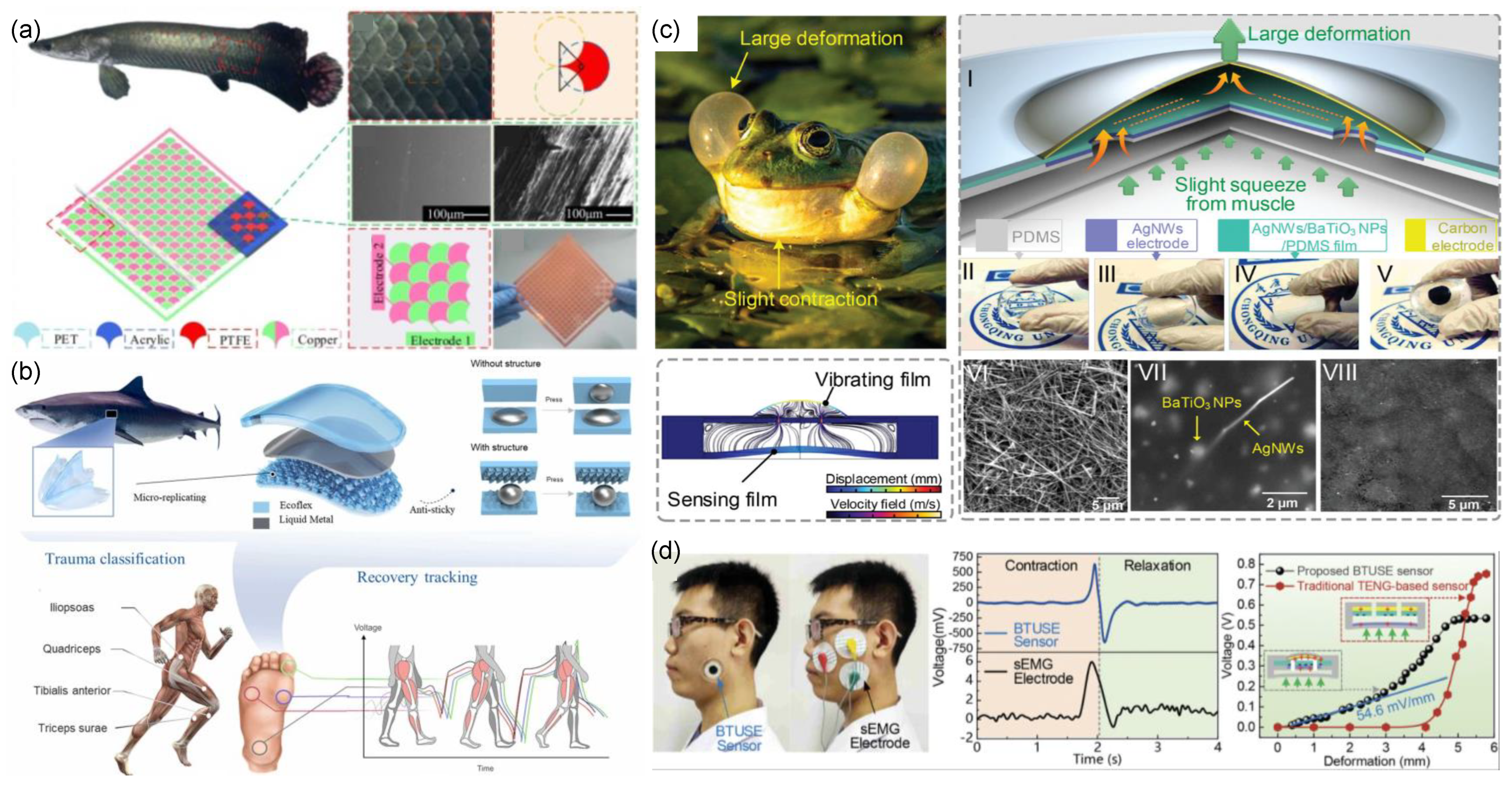
3.2. Animal-Inspired Structural Design
4. Material Biomimetic TENGs
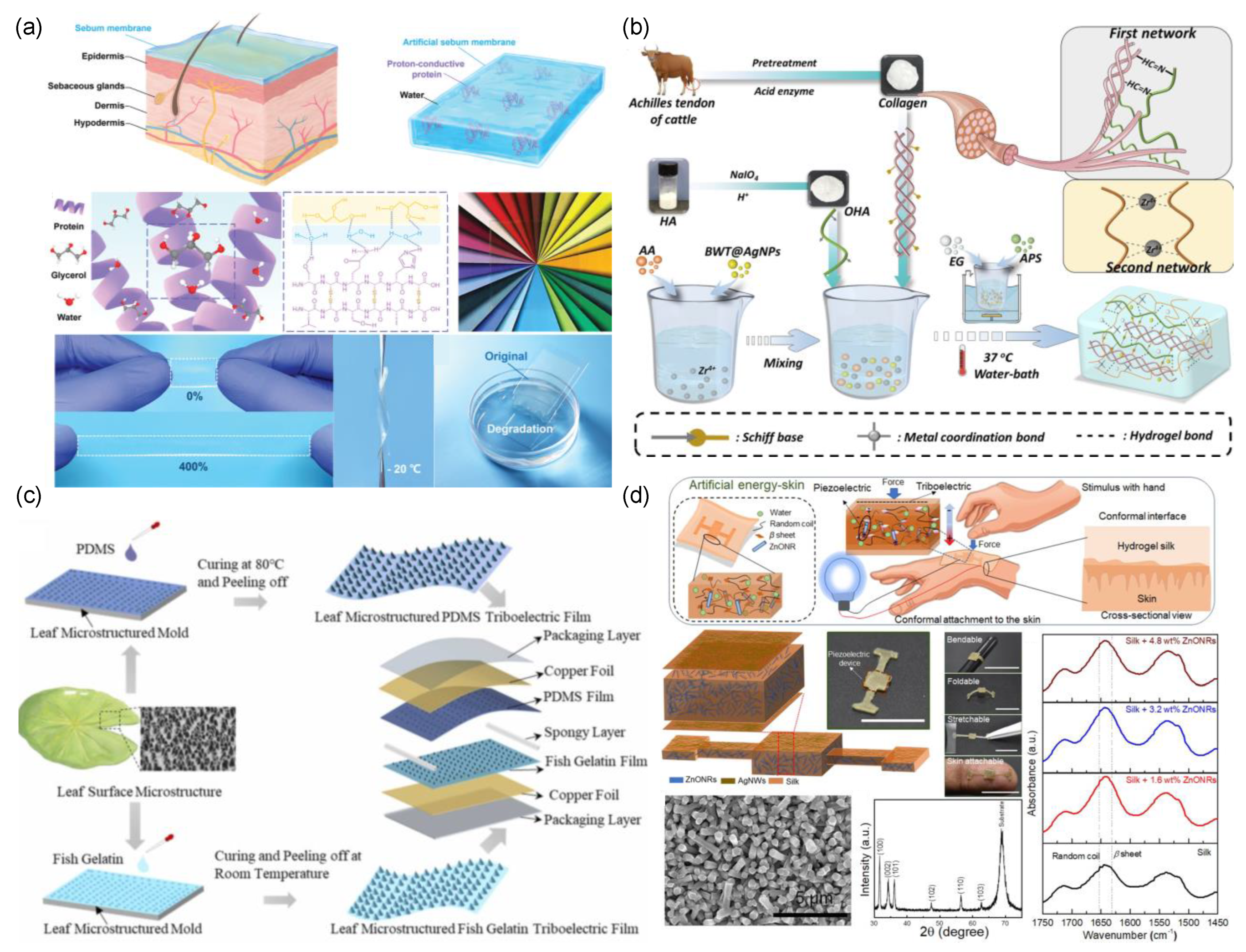
4.1. Protein Material Bionics
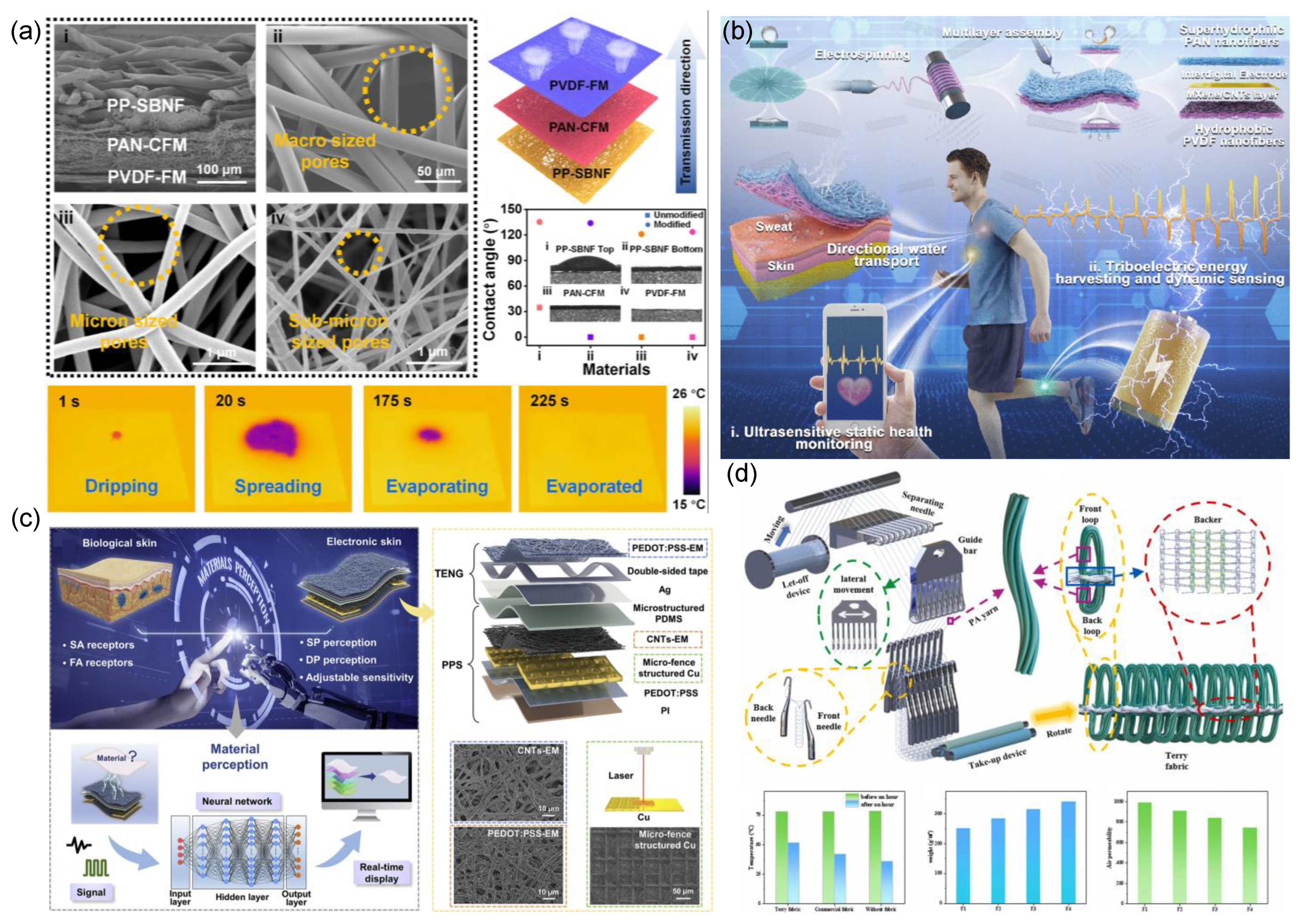
4.2. Fiber Material Bionic
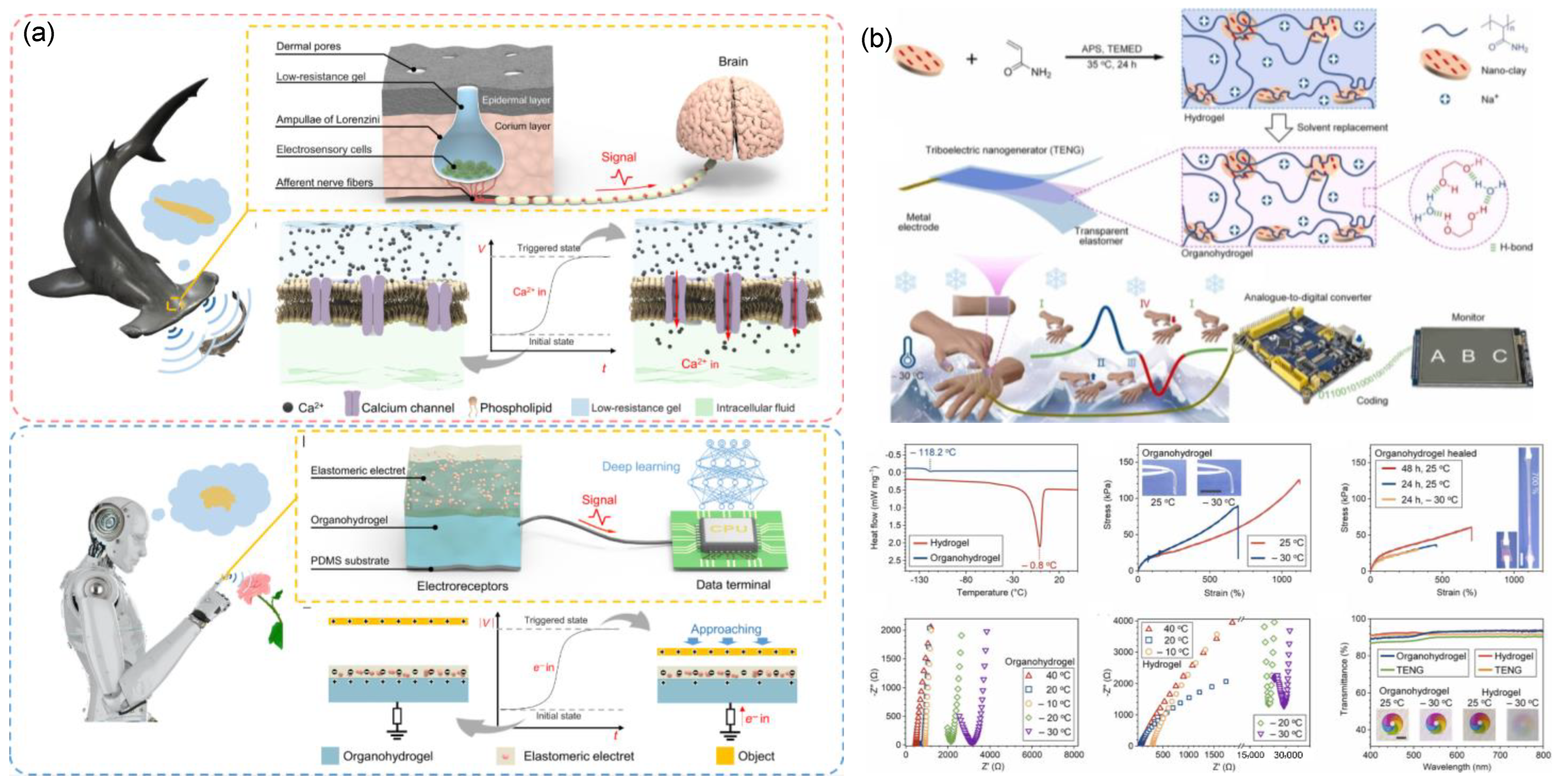
4.3. Hydrogel Material Bionics
5. Application of Biomimetic TENGs in E-Skin and HMI
5.1. Tactile Sensing
5.2. Motion Sensing
5.3. Intelligent Control
6. Conclusions and Perspectives
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, Z.; Zhu, M.; Shan, X.; Lee, C. Augmented tactile-perception and haptic-feedback rings as human-machine interfaces aiming for immersive interactions. Nat. Commun. 2022, 13, 5224. [Google Scholar] [CrossRef] [PubMed]
- Dong, B.; Zhang, Z.; Shi, Q.; Wei, J.; Ma, Y.; Xiao, Z.; Lee, C. Biometrics-protected optical communication enabled by deep learning–enhanced triboelectric/photonic synergistic interface. Sci. Adv. 2022, 8, eabl9874. [Google Scholar] [CrossRef]
- Li, J.; Carlos, C.; Zhou, H.; Sui, J.; Wang, Y.; Silva-Pedraza, Z.; Yang, F.; Dong, Y.; Zhang, Z.; Hacker, T.A.; et al. Stretchable piezoelectric biocrystal thin films. Nat. Commun. 2023, 14, 6562. [Google Scholar] [CrossRef]
- Guo, Z.H.; Wang, H.L.; Shao, J.; Shao, Y.; Jia, L.; Li, L.; Pu, X.; Wang, Z.L. Bioinspired soft electroreceptors for artificial precontact somatosensation. Sci. Adv. 2022, 8, eabo5201. [Google Scholar] [CrossRef] [PubMed]
- Wong, T.H.; Liu, Y.; Li, J.; Yao, K.; Liu, S.; Yiu, C.K.; Huang, X.; Wu, M.; Park, W.; Zhou, J.; et al. Triboelectric Nanogenerator Tattoos Enabled by Epidermal Electronic Technologies. Adv. Funct. Mater. 2022, 32, 2111269. [Google Scholar] [CrossRef]
- Shi, Q.; Sun, Z.; Le, X.; Xie, J.; Lee, C. Soft Robotic Perception System with Ultrasonic Auto-Positioning and Multimodal Sensory Intelligence. ACS Nano 2023, 17, 4985–4998. [Google Scholar] [CrossRef]
- Sun, Z.; Zhu, M.; Lee, C. Progress in the Triboelectric Human–Machine Interfaces (HMIs)-Moving from Smart Gloves to AI/Haptic Enabled HMI in the 5G/IoT Era. Nanoenergy Adv. 2021, 1, 81–120. [Google Scholar] [CrossRef]
- Peng, X.; Dong, K.; Zhang, Y.; Wang, L.; Wei, C.; Lv, T.; Wang, Z.L.; Wu, Z. Sweat-Permeable, Biodegradable, Transparent and Self-powered Chitosan-Based Electronic Skin with Ultrathin Elastic Gold Nanofibers. Adv. Funct. Mater. 2022, 32, 2112241. [Google Scholar] [CrossRef]
- Wei, X.; Li, H.; Yue, W.; Gao, S.; Chen, Z.; Li, Y.; Shen, G. A high-accuracy, real-time, intelligent material perception system with a machine-learning-motivated pressure-sensitive electronic skin. Matter 2022, 5, 1481–1501. [Google Scholar] [CrossRef]
- Li, X.; Zhu, P.; Zhang, S.; Wang, X.; Luo, X.; Leng, Z.; Zhou, H.; Pan, Z.; Mao, Y. A Self-Supporting, Conductor-Exposing, Stretchable, Ultrathin, and Recyclable Kirigami-Structured Liquid Metal Paper for Multifunctional E-Skin. ACS Nano 2022, 16, 5909–5919. [Google Scholar] [CrossRef]
- Zhi, C.; Shi, S.; Zhang, S.; Si, Y.; Yang, J.; Meng, S.; Fei, B.; Hu, J. Bioinspired All-Fibrous Directional Moisture-Wicking Electronic Skins for Biomechanical Energy Harvesting and All-Range Health Sensing. Nano-Micro Lett. 2023, 15, 60. [Google Scholar] [CrossRef]
- Tao, K.; Yu, J.; Zhang, J.; Bao, A.; Hu, H.; Ye, T.; Ding, Q.; Wang, Y.; Lin, H.; Wu, J.; et al. Deep-Learning Enabled Active Biomimetic Multifunctional Hydrogel Electronic Skin. ACS Nano 2023, 17, 16160–16173. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, Z.; He, T.; Sun, Z.; Wang, B.; Feng, Y.; Shan, X.; Salam, B.; Lee, C. Deep learning enabled smart mats as a scalable floor monitoring system. Nat. Commun. 2020, 11, 4609. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Li, N.; Zhang, Z.; Cui, X.; Zhang, H. Hydrogel-Based Energy Harvesters and Self-Powered Sensors for Wearable Applications. Nanoenergy Adv. 2023, 3, 315–342. [Google Scholar] [CrossRef]
- Qi, M.; Yang, R.; Wang, Z.; Liu, Y.; Zhang, Q.; He, B.; Li, K.; Yang, Q.; Wei, L.; Pan, C.; et al. Bioinspired Self-healing Soft Electronics. Adv. Funct. Mater. 2023, 33, 2214479. [Google Scholar] [CrossRef]
- Lin, X.; Bing, Y.; Li, F.; Mei, H.; Liu, S.; Fei, T.; Zhao, H.; Zhang, T. An All-Nanofiber-Based, Breathable, Ultralight Electronic Skin for Monitoring Physiological Signals. Adv. Mater. Technol. 2022, 7, 2101312. [Google Scholar] [CrossRef]
- Zeng, X.; Liu, Y.; Liu, F.; Wang, W.; Liu, X.; Wei, X.; Hu, Y. A bioinspired three-dimensional integrated e-skin for multiple mechanical stimuli recognition. Nano Energy 2022, 92, 106777. [Google Scholar] [CrossRef]
- Lu, D.; Liu, T.; Meng, X.; Luo, B.; Yuan, J.; Liu, Y.; Zhang, S.; Cai, C.; Gao, C.; Wang, J.; et al. Wearable Triboelectric Visual Sensors for Tactile Perception. Adv. Mater. 2023, 35, 2209117. [Google Scholar] [CrossRef]
- Zhang, C.; Li, Z.; Li, H.; Yang, Q.; Wang, H.; Shan, C.; Zhang, J.; Hou, X.; Chen, F. Femtosecond Laser-Induced Supermetalphobicity for Design and Fabrication of Flexible Tactile Electronic Skin Sensor. ACS Appl. Mater. Interfaces 2022, 14, 38328–38338. [Google Scholar] [CrossRef] [PubMed]
- Jia, C.; Xia, Y.; Zhu, Y.; Wu, M.; Zhu, S.; Wang, X. High-Brightness, High-Resolution, and Flexible Triboelectrification-Induced Electroluminescence Skin for Real-Time Imaging and Human–Machine Information Interaction. Adv. Funct. Mater. 2022, 32, 2201292. [Google Scholar] [CrossRef]
- Xie, Y.; Ma, Q.; Yue, B.; Chen, X.; Jin, Y.; Qi, H.; Hu, Y.; Yu, W.; Dong, X.; Jiang, H. Triboelectric nanogenerator based on flexible Janus nanofiber membrane with simultaneous high charge generation and charge capturing abilities. Chem. Eng. J. 2023, 452, 139393. [Google Scholar] [CrossRef]
- Kim, Y.; Suh, J.M.; Shin, J.; Liu, Y.; Yeon, H.; Qiao, K.; Kum, H.S.; Kim, C.; Lee, H.E.; Choi, C.; et al. Chip-less wireless electronic skins by remote epitaxial freestanding compound semiconductors. Science 2022, 377, 859–864. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Deswal, S.; Christou, A.; Sandamirskaya, Y.; Kaboli, M.; Dahiya, R. Neuro-inspired electronic skin for robots. Sci. Robot. 2022, 7, eabl7344. [Google Scholar] [CrossRef] [PubMed]
- Song, Z.; Yin, J.; Wang, Z.; Lu, C.; Yang, Z.; Zhao, Z.; Lin, Z.; Wang, J.; Wu, C.; Cheng, J.; et al. A flexible triboelectric tactile sensor for simultaneous material and texture recognition. Nano Energy 2022, 93, 106798. [Google Scholar] [CrossRef]
- Li, G.; Zhang, M.; Liu, S.; Yuan, M.; Wu, J.; Yu, M.; Teng, L.; Xu, Z.; Guo, J.; Li, G.; et al. Three-dimensional flexible electronics using solidified liquid metal with regulated plasticity. Nat. Electron. 2023, 6, 154–163. [Google Scholar] [CrossRef]
- Yao, G.; Xu, L.; Cheng, X.; Li, Y.; Huang, X.; Guo, W.; Liu, S.; Wang, Z.L.; Wu, H. Bioinspired Triboelectric Nanogenerators as Self-Powered Electronic Skin for Robotic Tactile Sensing. Adv. Funct. Mater. 2020, 30, 1907312. [Google Scholar] [CrossRef]
- Li, W.; Lu, L.; Kottapalli, A.G.P.; Pei, Y. Bioinspired sweat-resistant wearable triboelectric nanogenerator for movement monitoring during exercise. Nano Energy 2022, 95, 107018. [Google Scholar] [CrossRef]
- Dong, J.; Zhu, L.; Guo, P.; Xu, C.; Zhao, X.; Yang, S.; He, X.; Zhou, G.; Ma, G.; Guo, H.; et al. A bio-inspired total current nanogenerator. Energy Environ. Sci. 2023, 16, 1071–1081. [Google Scholar] [CrossRef]
- Xue, J.; Zou, Y.; Deng, Y.; Li, Z. Bioinspired sensor system for health care and human-machine interaction. EcoMat 2022, 4, e12209. [Google Scholar] [CrossRef]
- Yeh, C.; Kao, F.-C.; Wei, P.-H.; Pal, A.; Kaswan, K.; Huang, Y.-T.; Parashar, P.; Yeh, H.-Y.; Wang, T.-W.; Tiwari, N.; et al. Bioinspired shark skin-based liquid metal triboelectric nanogenerator for self-powered gait analysis and long-term rehabilitation monitoring. Nano Energy 2022, 104, 107852. [Google Scholar] [CrossRef]
- Dong, B.; Yang, Y.; Shi, Q.; Xu, S.; Sun, Z.; Zhu, S.; Zhang, Z.; Kwong, D.-L.; Zhou, G.; Ang, K.-W.; et al. Wearable Triboelectric–Human–Machine Interface (THMI) Using Robust Nanophotonic Readout. ACS Nano 2020, 14, 8915–8930. [Google Scholar] [CrossRef] [PubMed]
- Qiu, X.; Liu, J.; Zhou, B.; Zhang, X. Bioinspired Bimodal Mechanosensors with Real-Time, Visualized Information Display for Intelligent Control. Adv. Funct. Mater. 2023, 33, 2300321. [Google Scholar] [CrossRef]
- Shi, Q.; Lee, C. Self-Powered Bio-Inspired Spider-Net-Coding Interface Using Single-Electrode Triboelectric Nanogenerator. Adv. Sci. 2019, 6, 1900617. [Google Scholar] [CrossRef]
- Hajra, S.; Panda, S.; Khanberh, H.; Vivekananthan, V.; Chamanehpour, E.; Mishra, Y.K.; Kim, H.J. Revolutionizing self-powered robotic systems with triboelectric nanogenerators. Nano Energy 2023, 115, 108729. [Google Scholar] [CrossRef]
- Ye, G.; Wan, Y.; Wu, J.; Zhuang, W.; Zhou, Z.; Jin, T.; Zi, J.; Zhang, D.; Geng, X.; Yang, P. Multifunctional device integrating dual-temperature regulator for outdoor personal thermal comfort and triboelectric nanogenerator for self-powered human-machine interaction. Nano Energy 2022, 97, 107148. [Google Scholar] [CrossRef]
- Wang, M.; Dong, L.; Wu, J.; Shi, J.; Gao, Q.; Zhu, C.; Morikawa, H. Leaf-meridian bio-inspired nanofibrous electronics with uniform distributed microgrid and 3D multi-level structure for wearable applications. NPJ Flex. Electron. 2022, 6, 34. [Google Scholar] [CrossRef]
- Yao, S.; Zhao, X.; Wang, X.; Huang, T.; Ding, Y.; Zhang, J.; Zhang, Z.; Wang, Z.L.; Li, L. Bioinspired Electron Polarization of Nanozymes with a Human Self-Generated Electric Field for Cancer Catalytic Therapy. Adv. Mater. 2022, 34, 2109568. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Mu, J.; He, J.; Fan, X.; Zhang, Q.; Hou, X.; Geng, W.; Zhang, W.; Chou, X. Bioinspired Helical Triboelectric Nanogenerators for Energy Conversion of Motion. Adv. Mater. Technol. 2020, 5, 1900917. [Google Scholar] [CrossRef]
- Hu, Y.; Teng, Y.; Sun, Y.; Liu, P.; Fu, L.; Yang, L.; Kong, X.-Y.; Zhao, Q.; Jiang, L.; Wen, L. Bioinspired poly (ionic liquid) membrane for efficient salinity gradient energy harvesting: Electrostatic crosslinking induced hierarchical nanoporous network. Nano Energy 2022, 97, 107170. [Google Scholar] [CrossRef]
- Pandey, A.; Yang, T.-S.; Yang, T.-I.; Belem, W.F.; Teng, N.-C.; Chen, I.W.; Huang, C.-S.; Kareiva, A.; Yang, J.-C. An Insight into Nano Silver Fluoride-Coated Silk Fibroin Bioinspired Membrane Properties for Guided Tissue Regeneration. Polymers 2021, 13, 2659. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, R.; Yu, X.; Li, E.; Wang, C.; Liu, Y.; Guo, T.; Chen, H. Bioinspired Artificial Motion Sensory System for Rotation Recognition and Rapid Self-Protection. ACS Nano 2022, 16, 19155–19164. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Li, S.; He, Y.; Chen, C.; Jiang, S.; Yang, X.; Wang, X.; Pan, L.; Wan, Q. Oxide Synaptic Transistors Coupled With Triboelectric Nanogenerators for Bio-Inspired Tactile Sensing Application. IEEE Electron. Device Lett. 2020, 41, 617–620. [Google Scholar] [CrossRef]
- Zhang, J.-H.; Li, Y.; Du, J.; Hao, X.; Wang, Q. Bio-inspired hydrophobic/cancellous/hydrophilic Trimurti PVDF mat-based wearable triboelectric nanogenerator designed by self-assembly of electro-pore-creating. Nano Energy 2019, 61, 486–495. [Google Scholar] [CrossRef]
- Chung, K.Y.; Xu, B.; Li, Z.; Liu, Y.; Han, J. Bioinspired ultra-stretchable dual-carbon conductive functional polymer fiber materials for health monitoring, energy harvesting and self-powered sensing. Chem. Eng. J. 2023, 454, 140384. [Google Scholar] [CrossRef]
- Feng, T.; Ling, D.; Li, C.; Zheng, W.; Zhang, S.; Li, C.; Emel’yanov, A.; Pozdnyakov, A.S.; Lu, L.; Mao, Y. Stretchable on-skin touchless screen sensor enabled by ionic hydrogel. Nano Res. 2023, 1–9. [Google Scholar] [CrossRef]
- Xu, J.; Sun, X.; Sun, B.; Zhu, H.; Fan, X.; Guo, Q.; Li, Y.; Zhu, Z.; Qian, K. Stretchable, Adhesive, and Bioinspired Visual Electronic Skin with Strain/Temperature/Pressure Multimodal Non-Interference Sensing. ACS Appl. Mater. Interfaces 2023, 15, 33774–33783. [Google Scholar] [CrossRef]
- Yue, O.; Wang, X.; Liu, X.; Hou, M.; Zheng, M.; Wang, Y.; Cui, B. Spider-Web and Ant-Tentacle Doubly Bio-Inspired Multifunctional Self-Powered Electronic Skin with Hierarchical Nanostructure. Adv. Sci. 2021, 8, 2004377. [Google Scholar] [CrossRef]
- Panda, S.; Hajra, S.; Rajaitha, P.M.; Kim, H.J. Stimuli-responsive polymer-based bioinspired soft robots. Micro Nano Syst. Lett. 2023, 11, 2. [Google Scholar] [CrossRef]
- Yu, J.; Wang, Y.; Qin, S.; Gao, G.; Xu, C.; Lin Wang, Z.; Sun, Q. Bioinspired interactive neuromorphic devices. Mater. Today 2022, 60, 158–182. [Google Scholar] [CrossRef]
- Li, J.; Yuan, Z.; Han, X.; Wang, C.; Huo, Z.; Lu, Q.; Xiong, M.; Ma, X.; Gao, W.; Pan, C. Biologically Inspired Stretchable, Multifunctional, and 3D Electronic Skin by Strain Visualization and Triboelectric Pressure Sensing. Small Sci. 2022, 2, 2100083. [Google Scholar] [CrossRef]
- Li, H.; Lv, S.; Fang, Y. Bio-inspired micro/nanostructures for flexible and stretchable electronics. Nano Res. 2020, 13, 1244–1252. [Google Scholar] [CrossRef]
- Yao, X.; Zou, S.; Fan, S.; Niu, Q.; Zhang, Y. Bioinspired silk fibroin materials: From silk building blocks extraction and reconstruction to advanced biomedical applications. Mater. Today Bio 2022, 16, 100381. [Google Scholar] [CrossRef]
- Bai, L.; Jin, Y.; Shang, X.; Shi, L.; Jin, H.; Zhou, R.; Lai, S. Bio-inspired visual multi-sensing interactive ionic skin with asymmetrical adhesive, antibacterial and self-powered functions. Chem. Eng. J. 2022, 438, 135596. [Google Scholar] [CrossRef]
- Gong, S.; Ding, Q.; Wu, J.; Li, W.-B.; Guo, X.-Y.; Zhang, W.-M.; Shao, L. Bioinspired Multifunctional Mechanoreception of Soft–Rigid Hybrid Actuator Fingers. Adv. Intell. Syst. 2022, 4, 2100242. [Google Scholar] [CrossRef]
- Li, W.; Pei, Y.; Zhang, C.; Kottapalli, A.G.P. Bioinspired designs and biomimetic applications of triboelectric nanogenerators. Nano Energy 2021, 84, 105865. [Google Scholar] [CrossRef]
- Mayer, M.; Xiao, X.; Yin, J.; Chen, G.; Xu, J.; Chen, J. Advances in Bioinspired Triboelectric Nanogenerators. Adv. Electron. Mater. 2022, 8, 2200782. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, B.; Li, W.; Zu, L.; Tang, W.; Wang, Z.L. Bioinspired Triboelectric Soft Robot Driven by Mechanical Energy. Adv. Funct. Mater. 2021, 31, 2104770. [Google Scholar] [CrossRef]
- Wang, F.; Ren, Z.; Nie, J.; Tian, J.; Ding, Y.; Chen, X. Self-Powered Sensor Based on Bionic Antennae Arrays and Triboelectric Nanogenerator for Identifying Noncontact Motions. Adv. Mater. Technol. 2020, 5, 1900789. [Google Scholar] [CrossRef]
- Zhou, H.; Li, D.; He, X.; Hui, X.; Guo, H.; Hu, C.; Mu, X.; Wang, Z.L. Bionic Ultra-Sensitive Self-Powered Electromechanical Sensor for Muscle-Triggered Communication Application. Adv. Sci. 2021, 8, 2101020. [Google Scholar] [CrossRef]
- Song, B.; Fan, X.; Shen, J.; Gu, H. Ultra-stable and self-healing coordinated collagen-based multifunctional double-network organohydrogel e-skin for multimodal sensing monitoring of strain-resistance, bioelectrode, and self-powered triboelectric nanogenerator. Chem. Eng. J. 2023, 474, 145780. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, Z.; Xu, L.; Gao, F.; Zhao, B.; Ouyang, T.; Kang, Z.; Liao, Q.; Zhang, Y. Fingerprint-inspired electronic skin based on triboelectric nanogenerator for fine texture recognition. Nano Energy 2021, 85, 106001. [Google Scholar] [CrossRef]
- Gong, Y.; Zhang, Y.-Z.; Fang, S.; Sun, Y.; Niu, J.; Lai, W.-Y. Wireless Human–Machine Interface Based on Artificial Bionic Skin with Damage Reconfiguration and Multisensing Capabilities. ACS Appl. Mater. Interfaces 2022, 14, 47300–47309. [Google Scholar] [CrossRef]
- Cao, X.; Xiong, Y.; Sun, J.; Xie, X.; Sun, Q.; Wang, Z.L. Multidiscipline Applications of Triboelectric Nanogenerators for the Intelligent Era of Internet of Things. Nano Micro Lett. 2022, 15, 14. [Google Scholar] [CrossRef]
- Shi, B.; Wang, Q.; Su, H.; Li, J.; Xie, B.; Wang, P.; Qiu, J.; Wu, C.; Zhang, Y.; Zhou, X.; et al. Progress in recent research on the design and use of triboelectric nanogenerators for harvesting wind energy. Nano Energy 2023, 116, 108789. [Google Scholar] [CrossRef]
- Zhang, Z.; Qi, Z.; Sun, X.; Xu, J. A triboelectric nanogenerator based on bionic design for harvesting energy from low-frequency vibration. Int. J. Non-Linear Mech. 2023, 157, 104540. [Google Scholar] [CrossRef]
- Wang, Z.; Cui, J.; Luan, M.; Hao, C.; Zheng, Y.; Xue, C. Robotic pressure sensing sensor based on triboelectric nanogenerator. In Proceedings of the 2022 IEEE International Conference on Cyborg and Bionic Systems (CBS), Wuhan, China, 24–26 March 2023; pp. 336–340. [Google Scholar]
- Wang, X.; Liu, J.; Wang, S.; Zheng, J.; Guan, T.; Liu, X.; Wang, T.; Chen, T.; Wang, H.; Xie, G.; et al. A Self-powered Triboelectric Coral-Like Sensor Integrated Buoy for Irregular and Ultra-Low Frequency Ocean Wave Monitoring. Adv. Mater. Technol. 2022, 7, 2101098. [Google Scholar] [CrossRef]
- Ma, G.; Li, B.; Niu, S.; Zhang, J.; Wang, D.; Wang, Z.; Zhou, L.; Liu, Q.; Liu, L.; Wang, J.; et al. A bioinspired triboelectric nanogenerator for all state energy harvester and self-powered rotating monitor. Nano Energy 2022, 91, 106637. [Google Scholar] [CrossRef]
- Wang, T.; Shen, Y.; Chen, L.; Wang, K.; Niu, L.; Liu, G.; He, H.; Cong, H.; Jiang, G.; Zhang, Q.; et al. Large-scale production of the 3D warp knitted terry fabric triboelectric nanogenerators for motion monitoring and energy harvesting. Nano Energy 2023, 109, 108309. [Google Scholar] [CrossRef]
- Wang, Z.; Wan, D.; Cui, X.; Khan, S.A.; Zhuo, K.; Zhang, H. Wearable Electronics Powered by Triboelectrification between Hair and Cloth for Monitoring Body Motions. Energy Technol. 2022, 10, 2200195. [Google Scholar] [CrossRef]
- Zhu, D.; Lu, J.; Zheng, M.; Wang, D.; Wang, J.; Liu, Y.; Wang, X.; Zhang, M. Self-powered bionic antenna based on triboelectric nanogenerator for micro-robotic tactile sensing. Nano Energy 2023, 114, 108644. [Google Scholar] [CrossRef]
- Yao, Y.; Wang, K.; Gao, X.; Zhou, Z.; Liu, Y.; Zhang, J.; Lu, X. Planar Acceleration Sensor for UAV in Cruise State Based on Single-Electrode Triboelectric Nanogenerator. IEEE Sens. J. 2023, 23, 3041–3049. [Google Scholar] [CrossRef]
- Wang, J.; Ma, L.; He, J.; Yao, Y.; Zhu, X.; Peng, L.; Yang, J.; Li, K.; Qu, M. Superwettable hybrid dielectric based multimodal triboelectric nanogenerator with superior durability and efficiency for biomechanical energy and hydropower harvesting. Chem. Eng. J. 2022, 431, 134002. [Google Scholar] [CrossRef]
- Xia, R.; Zhang, R.; Jie, Y.; Zhao, W.; Cao, X.; Wang, Z. Natural cotton-based triboelectric nanogenerator as a self-powered system for efficient use of water and wind energy. Nano Energy 2022, 92, 106685. [Google Scholar] [CrossRef]
- Zhang, S.; Jing, Z.; Wang, X.; Zhu, M.; Yu, X.; Zhu, J.; Cheng, T.; Zhao, H.; Wang, Z.L. Soft-bionic-fishtail structured triboelectric nanogenerator driven by flow-induced vibration for low-velocity water flow energy harvesting. Nano Res. 2023, 16, 466–472. [Google Scholar] [CrossRef]
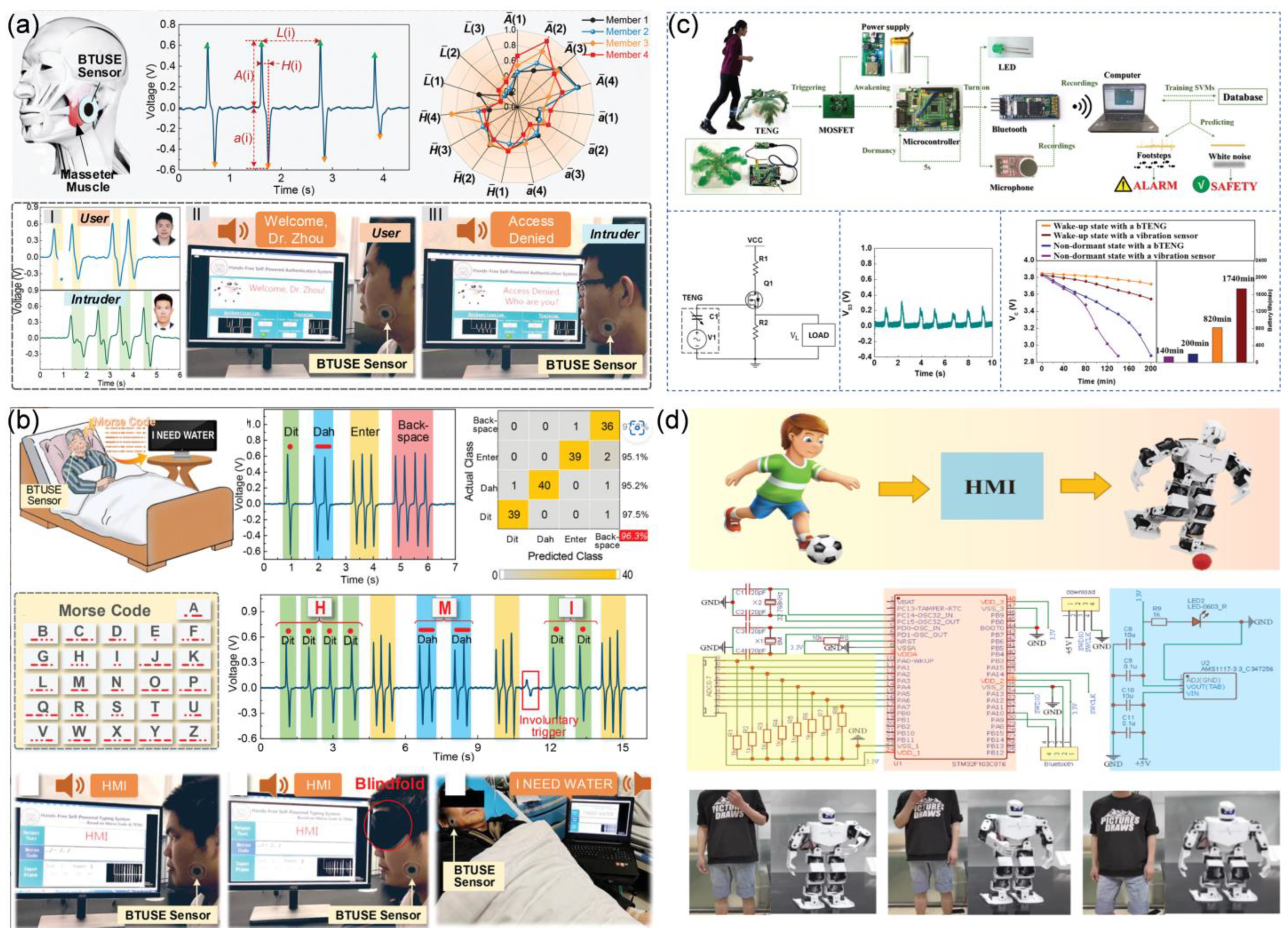
- Zhang, C.; Dai, K.; Liu, D.; Yi, F.; Wang, X.; Zhu, L.; You, Z. Ultralow Quiescent Power-Consumption Wake-Up Technology Based on the Bionic Triboelectric Nanogenerator. Adv. Sci. 2020, 7, 2000254. [Google Scholar] [CrossRef]
- Wang, J.; Chen, C.C.; Shie, C.Y.; Li, T.T.; Fuh, Y.K. A hybrid sensor for motor tics recognition based on piezoelectric and triboelectric design and fabrication. Sens. Actuators A Phys. 2022, 342, 113622. [Google Scholar] [CrossRef]
- Niu, L.; Peng, X.; Chen, L.; Liu, Q.; Wang, T.; Dong, K.; Pan, H.; Cong, H.; Liu, G.; Jiang, G.; et al. Industrial production of bionic scales knitting fabric-based triboelectric nanogenerator for outdoor rescue and human protection. Nano Energy 2022, 97, 107168. [Google Scholar] [CrossRef]
- Leng, Z.; Zhu, P.; Wang, X.; Wang, Y.; Li, P.; Huang, W.; Li, B.; Jin, R.; Han, N.; Wu, J.; et al. Sebum-Membrane-Inspired Protein-Based Bioprotonic Hydrogel for Artificial Skin and Human-Machine Merging Interface. Adv. Funct. Mater. 2023, 33, 2211056. [Google Scholar] [CrossRef]
- Shi, X.; Wei, Y.; Yan, R.; Hu, L.; Zhi, J.; Tang, B.; Li, Y.; Yao, Z.; Shi, C.; Yu, H.-D.; et al. Leaf surface-microstructure inspired fabrication of fish gelatin-based triboelectric nanogenerator. Nano Energy 2023, 109, 108231. [Google Scholar] [CrossRef]
- Gogurla, N.; Roy, B.; Kim, S. Self-powered artificial skin made of engineered silk protein hydrogel. Nano Energy 2020, 77, 105242. [Google Scholar] [CrossRef]
- Yang, P.; Shi, Y.; Tao, X.; Liu, Z.; Li, S.; Chen, X.; Wang, Z.L. Self-powered virtual olfactory generation system based on bionic fibrous membrane and electrostatic field accelerated evaporation. EcoMat 2023, 5, e12298. [Google Scholar] [CrossRef]
- Xu, Z.; Zhou, F.; Yan, H.; Gao, G.; Li, H.; Li, R.; Chen, T. Anti-freezing organohydrogel triboelectric nanogenerator toward highly efficient and flexible human-machine interaction at −30 °C. Nano Energy 2021, 90, 106614. [Google Scholar] [CrossRef]
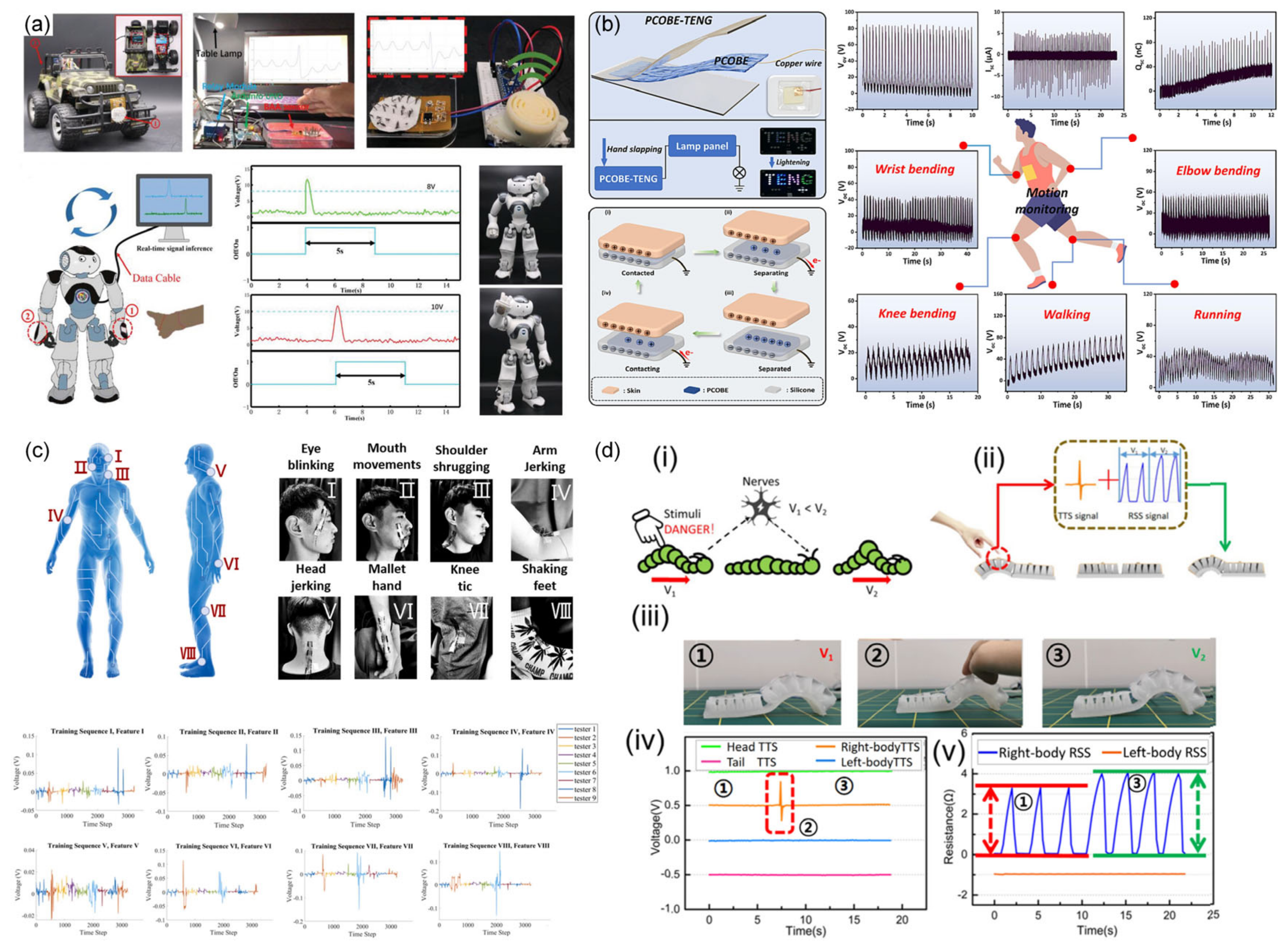
- Jin, G.; Sun, Y.; Geng, J.; Yuan, X.; Chen, T.; Liu, H.; Wang, F.; Sun, L. Bioinspired soft caterpillar robot with ultra-stretchable bionic sensors based on functional liquid metal. Nano Energy 2021, 84, 105896. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices | Working Mode | Bionic Objects | QSC | ISC | VOC (V) | Reference |
|---|---|---|---|---|---|---|
| bTENG | SE | lotus-leaf | - | - | 1.2 | [76] |
| TENG e-skin | CS | alathea zebrine leaf | 23.98 μC/m2 | 6.29 nA | 3.14 | [26] |
| TENG | CS | nature frond leaf | - | 0.45 μA | 78 | [36] |
| PBHS | CS | nymphaea tetragona | - | 46 nA | 13.1 | [77] |
| BAA | SE | cockroaches’ antennae | 35 nC | 118 nA | 55 | [58] |
| SBA | SE | insect antennae | - | - | 1.75 | [71] |
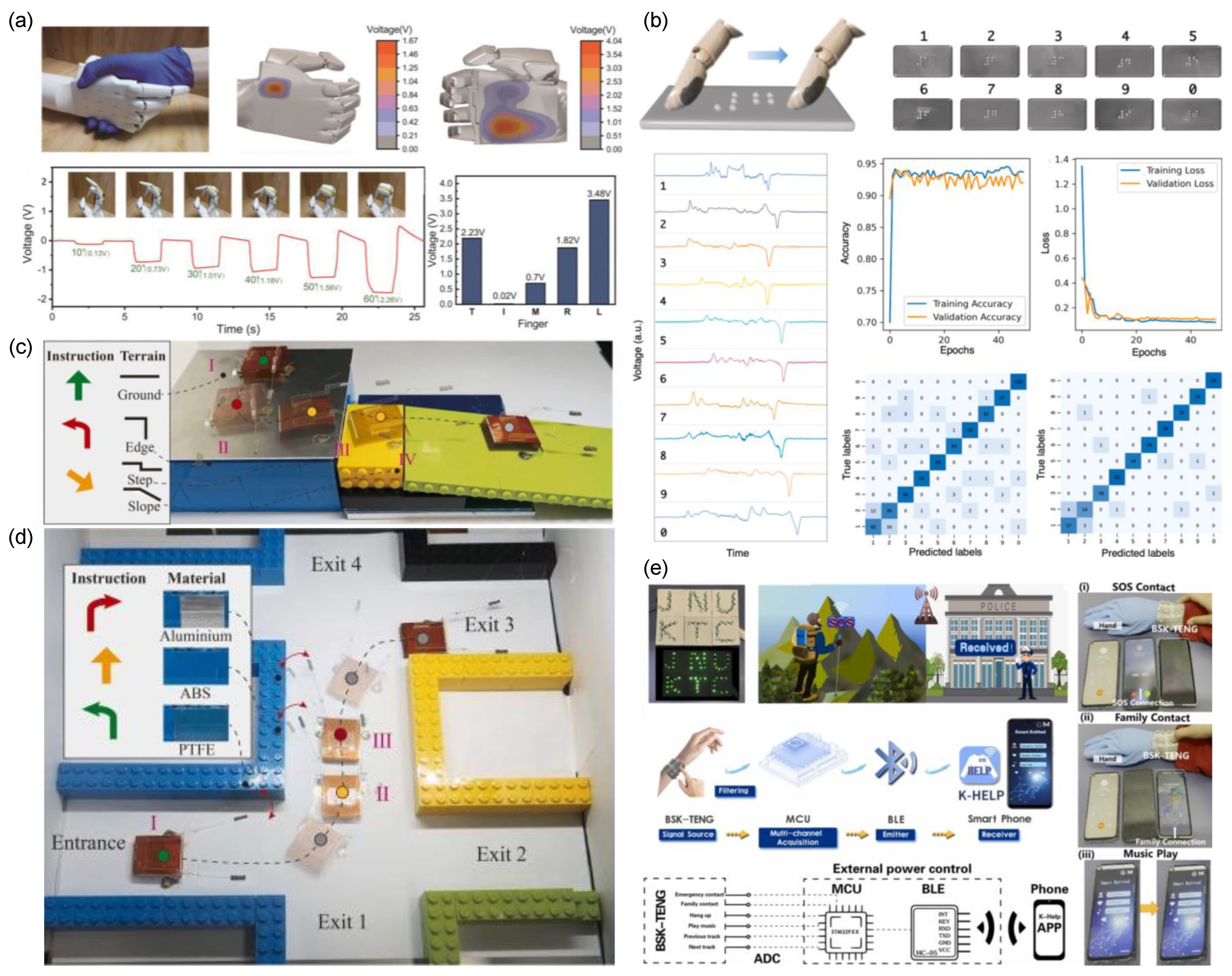
| BSK-TENG | SE | imbricate scales | - | - | - | [78] |
| FSL-TENG | SE | fish-scale | - | 6.2 μA | 63 | [68] |
| VCS-TENG | CS | shark skin | - | 0.7 μA | 32 | [30] |
| BTUSE | CS | frog | - | - | 0.7 | [59] |
| Devices | Working Mode | Bionic Objects | QSC | ISC | VOC (V) | Reference |
|---|---|---|---|---|---|---|
| B-skin | SE | bovine serum albumin | - | 0.7 μA | 474 | [79] |
| PCOBE-TENG | SE | achilles tendon of Simmental cattle | 50 nC | 5 μA | 80 | [60] |
| LMFG-TENG | CS | fish gelatin | - | 0.8 μA | 300 | [80] |
| EG-skin | SE | silk protein | - | - | 5 | [81] |
| UVE-TENG | FT | fibrous membrane | - | 1 μA | 8k | [82] |
| DMWES | SE | fibrous | 49 nC | 1.6 μA | 62 | [11] |
| PTES | CS | eggshell membrane | - | - | - | [9] |
| organohydrogel TENG | SE | urea and glucose | 26.9 nC | 0.73 μA | 83.9 | [83] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Jiang, Y.; Chen, B.; Li, H.; Mao, Y. Recent Progress of Bioinspired Triboelectric Nanogenerators for Electronic Skins and Human–Machine Interaction. Nanoenergy Adv. 2024, 4, 45-69. https://doi.org/10.3390/nanoenergyadv4010003
Zhang B, Jiang Y, Chen B, Li H, Mao Y. Recent Progress of Bioinspired Triboelectric Nanogenerators for Electronic Skins and Human–Machine Interaction. Nanoenergy Advances. 2024; 4(1):45-69. https://doi.org/10.3390/nanoenergyadv4010003
Chicago/Turabian StyleZhang, Baosen, Yunchong Jiang, Baojin Chen, Haidong Li, and Yanchao Mao. 2024. "Recent Progress of Bioinspired Triboelectric Nanogenerators for Electronic Skins and Human–Machine Interaction" Nanoenergy Advances 4, no. 1: 45-69. https://doi.org/10.3390/nanoenergyadv4010003