

Velocity-Oriented Dynamic Control–Display Gain for Kinesthetic Interaction with a Grounded Force-Feedback Device


TAUCHI Research Center, Tampere University, 33100 Tampere, Finland
*
Author to whom correspondence should be addressed.
Multimodal Technol. Interact. 2023, 7(2), 12; https://doi.org/10.3390/mti7020012
Submission received: 13 December 2022
/
Revised: 20 January 2023
/
Accepted: 24 January 2023
/
Published: 28 January 2023
(This article belongs to the Special Issue 3D User Interfaces and Virtual Reality)
Abstract
:Kinesthetic interaction is an important interaction method for virtual reality. Current kinesthetic interaction using a grounded force-feedback device, however, is still considered difficult and time-consuming because of the interaction difficulty in a three-dimensional space. Velocity-oriented dynamic control–display (CD) gain has been used to improve user task performance with pointing devices, such as the mouse. In this study, we extended the application of this technique to kinesthetic interaction and examined its effects on interaction speed, positioning accuracy and touch perception. The results showed that using this technique could improve interaction speed without affecting positioning accuracy in kinesthetic interaction. Velocity-oriented dynamic CD gain could negatively affect touch perception in softness while using large gains. However, it is promising and particularly suitable for kinesthetic tasks that do not require high accuracy in touch perception.
1. Introduction
Kinesthetic interaction, as a form of human–computer interaction (HCI), can be essential in increasing the level of immersion in virtual reality (VR). It is a three-dimensional (3D) interaction focusing on applying force feedback to provide users with motion sensations in muscles, tendons and joints [1]. Unlike vibrotactile feedback, which can be provided by using simple actuators, providing force feedback to the user in VR requires sophisticated kinesthetic devices. Current hand-based kinesthetic devices mainly include wearable haptic gloves (e.g., HaptX gloves [2]) and grounded force-feedback devices (e.g., Geomagic Touch devices [3] and Force Dimension Omega devices [4]). Wearable haptic gloves are still relatively new and mostly under development and grounded force-feedback devices are currently the most popular kinesthetic devices. These devices normally have a mechanical arm that allows the user to hold and perform natural hand touch behavior and generate high-resolution force with three or six degrees of freedom, providing a reliable desktop kinesthetic interface [5]. During the interaction, the grounded force-feedback device is used as the input tool to control the haptic interaction point (HIP) on a 2D screen or in a VR environment for haptically exploring virtual objects. Kinesthetic interaction with a force-feedback device has been widely used in many professional fields, such as industrial manufacturing [6] and medicine [7]. In particular, in medicine, force feedback from the device has been demonstrated to be beneficial for various medical practices, such as anatomy education [8], robot-assisted surgery [9], medical diagnosis and planning [10]. Although kinesthetic interaction has a wide range of applications, it is still considered difficult and time-consuming compared to 2D interaction techniques. For example, in medical diagnosis and planning, a medical landmarking study showed that, compared to the traditional 2D interface that uses a mouse, kinesthetic interaction using a force-feedback device led to longer task completion time and lower task accuracy [11]. It is, therefore, necessary to explore new interaction techniques to improve user performance while using such kinesthetic devices.
In HCI, user performance in interaction highly depends on the control of the input device. For example, current 2D interfaces mainly rely on a pointing device, such as the mouse to control the cursor on the 2D screen for different computer tasks. User control over the cursor directly influences the follow-up operations, such as selection and dragging, and thus the overall quality of interaction. To improve interaction efficiency, a common method is to increase the control–display (CD) gain. CD gain determines the proportion of the translation and rotation of the input device to the ones of the display pointer [12,13]. By applying a large CD gain, a small motion of the input device would be scaled into a large motion of the onscreen cursor. Therefore, this technique has been widely used to increase the cursor speed for improving pointing efficiency. However, using large constant CD gains often suffers from the issue of low pointing precision [12]. To address this issue, various interaction techniques based on dynamic CD gain have been developed. The most popular one is the velocity-oriented dynamic CD gain. This technique dynamically adjusts the gain between the input device and the display pointer, depending on the velocity of the user’s hand movement, that is, when the velocity of the hand movement is high, CD gain is high and vice versa. Therefore, this technique has the potential to increase the interaction speed and simultaneously maintain the pointing precision. Many techniques have been developed based on the velocity-oriented dynamic CD gain. For example, Pointer Acceleration used in Microsoft Windows OS and Apple Mac OS is a popular technique using the velocity-oriented dynamic CD gain to improve interaction efficiency with the mouse [14]. Other similar techniques include, for example, PRISM proposed by Frees and Kessler [15] and Adaptive pointing proposed by König et al. [16]. Both techniques were developed to address the imprecision of the user interaction in virtual environments by dynamically adjusting the gain in a range (0 to 1) based on hand speed.
CD gain is also important for kinesthetic interaction with force-feedback devices. These devices measure their absolute position in 3D space and have a limited workspace based on the length of their arms [3,4]. We need to clutch the device to reposition the HIP when the explored objects are out of its workspace. To avoid such a clutching process, a large constant CD gain is often used to increase the workspace size. Similarly, large CD gains could also increase interaction speed but at the cost of task accuracy [17]. Although dynamic CD gains have been studied for years to improve the interaction with pointing devices, such as mouse [12,13], there are no studies to explore the feasibility of using this technique in kinesthetic interaction and to examine its effects on user performance in kinesthetic tasks. Furthermore, previous studies with pointing devices have found that different gains would lead to different user performance, such as different task completion times. High gains might lead to longer task completion times (e.g., [18,19]). Therefore, it is necessary to investigate the effects of dynamic CD gains with different gains on user performance in kinesthetic interaction. More importantly, in kinesthetic interaction, dynamic CD gains would influence the HIP movement when performing touch behaviors. It remains unknown how dynamic CD gains affect users’ touch perception, for example, softness perception, which is a critical sensation for professional applications, such as medicine.
In this study, we proposed and examined the technique of velocity-oriented dynamic CD gain for kinesthetic interaction using a typical force-feedback device. We adopted the same principle that dynamically changes the gain based on the velocity of hand movement but adjusted the key parameters, that is, the maximum and minimum gains, to make them suitable for kinesthetic interaction. In the experiment, there were two kinesthetic tasks. The first task was to examine interaction speed and positioning accuracy by asking the participants to touch multiple virtual objects with different spatial positions. The second task was a softness discrimination task that required participants to compare two soft tissues and select the harder one. The purpose was to investigate the effects of dynamic CD gains on users’ touch perception. A total of 24 participants were recruited from the local university community. To evaluate this CD gain technique, we collected both objective and subjective data. Objective data include task completion time and positioning accuracy (the first task), as well as the number of errors in softness discrimination (the second task). We also collected the participants’ comments and opinions as subjective data through a post-test interview.
The study focused on the following research question:
How does the velocity-oriented dynamic CD gain affect user performance in kinesthetic interaction, in terms of interaction speed, positioning accuracy and touch perception?
This study makes the following contributions: we demonstrated the feasibility of using the velocity-oriented dynamic CD gain for kinesthetic interaction. When using this technique, the interaction speed could improve approximately 20% and simultaneously it might not affect positioning accuracy for kinesthetic interaction. Furthermore, the study experimentally demonstrated the negative effect of dynamic CD gains on human touch perception. To the best of the researchers’ knowledge, this is the first study in this research area and provides empirical basis for future studies.
The paper is organized as follows. We first provide background for the study and introduce the methodology. The experiment and the results are presented next. Finally, we discuss the experiment results and conclude with the main findings of the study.
2. Background
2.1. Professional Applications and Challenges of Kinesthetic Interaction
Kinesthetic interaction is a popular interaction method in many professional fields. For example, in industrial manufacturing, Read et al. [6] developed a sketch-based modelling VR system for industrial use with a grounded force-feedback device as the interaction tool. This system can conduct concurrent design for virtual assembly and machining, which could decrease the time taken for the design process, reduce the cost and lead to a better design solution. Similarly, Teklemariam and Das [20] conducted a study that used a force-feedback device in virtual product design. It demonstrated the advantages of force feedback in product development and evaluation. In medicine, kinesthetic interaction system has been used in various palpation simulations [21]. It has also been used for anatomy education to address the students’ psychological issues, such as fear and anxiety [8]. Furthermore, kinesthetic interaction is important for robot-assisted surgery. Force feedback from the kinesthetic devices has been demonstrated to be beneficial to improve the surgeon’s control over the robotic system and reduce operational errors [9,22]. In addition, kinesthetic interaction has been demonstrated to be helpful in medical landmarking for diagnosis and planning [10,23].
Current kinesthetic interaction, however, is still considered to be time-consuming and difficult because of the difficulty of 3D interaction. Although 3D interaction has been considered as a potentially powerful interaction method for computer tasks, especially 3D manipulation tasks [24,25], it suffers from the issue of lower efficiency. For example, previous research compared a kinesthetic VR system that used a force-feedback device with the traditional 2D interface that used a mouse in a medical landmarking task with medical 3D models. The kinesthetic VR system was considered inefficient and difficult to use by medical professionals [11]. Another example is a study of controlling mining software in the VR environment. The researchers compared a 3D interaction method that used a VR controller with the mouse-based 2D interaction method. The study showed that the 2D interaction method was more efficient and easier to use [26]. With the increase in applications of kinesthetic interaction in professional fields, developing new techniques to improve kinesthetic interaction becomes important. The present study contributed to this line of research by using the technique of velocity-oriented dynamic CD gain to improve user performance in kinesthetic interaction.
2.2. CD Gain Techniques in Human–Computer Interaction
CD gain is an important technique in HCI, which could increase the movement speed of the interaction point and thus has potential to improve interaction efficiency. However, its effects on user performance are different in different studies. For instance, for a mouse task, one study found that when increasing the gain in a range from 1 to 3, the task completion time was decreased [27]. Another study [18] showed a different result. When the gain of the mouse was increased from 1 to 2, the task completion time was decreased. However, when further increasing the gain from 2 to 32, the task completion time had no difference at first and then began to increase. This result showed a U-shaped relationship between the increasing gain and the task completion time. Other studies have also observed such a U-shaped relationship, such as interaction with a head-controlled pointer [19], interaction tasks on a 2D monitor using a graphics tablet [28] and interaction with small touch screen interfaces [29]. All the above studies were based on constant CD gains.
Dynamic CD gain is an interaction technique that dynamically changes the gain value based on the requirement of the interaction. One of the early interaction techniques based on the dynamic CD gain is the go–go technique [30]. It non-linearly mapped the user’s hand movement with the virtual hand when the target was out of reach and thus allowed the user to stretch the virtual arm to reach distant objects. Currently, the techniques of dynamic CD gain mainly rely on the movement speed of the user’s hand. The principle is that when the users want to traverse a great distance in a virtual environment, they will increase the hand movement speed and then the system will increase the CD gain. When the interaction point is close to the target, they will slow the hand movement for precise control, and the CD gain will be decreased. Therefore, using the velocity-oriented CD technique has the potential to improve interaction efficiency overall. Pointer acceleration is a popular mouse-based technique based on the velocity-oriented dynamic CD gain. This technique can largely improve interaction speed compared to using the constant gain. However, it still suffers from the issue of pointing accuracy [14].
There are also techniques based on the velocity-oriented dynamic CD gain to address the issue of pointing accuracy for handheld and pointing devices, such as the PRISM technique [15] and Adaptive pointing [16]. In PRISM, the maximum gain was set at 1. The gain was decreased following the decreasing hand movement speed. When the user’s hand movements were below a minimum speed, they were considered as noise and thus ignored. Using the PRISM technique could cause an offset between the positions of the input device and the virtual device because of the mismatch of their movements. This technique increased the CD gain (above 1) when the hand movement exceeded a maximum speed to make the virtual device move relatively faster to recover the offset. Adaptive pointing adopted a similar design principle to improve the interaction with absolute input devices but performed more smoothly for pointing behaviors and recovering the offset. The results showed that both techniques successfully improve pointing accuracy.
Dynamic CD gains have been well studied in various interaction scenarios with pointing devices for years. This study attempted to use the velocity-oriented dynamic CD gain to improve kinesthetic interaction. Simultaneously, kinesthetic interaction provides force feedback to the users and allows them to feel touch feeling for virtual objects. Therefore, we also examined the effect of this technique on human touch perception.
3. Method
3.1. Velocity-Oriented Dynamic CD Gain for Kinesthetic Interaction
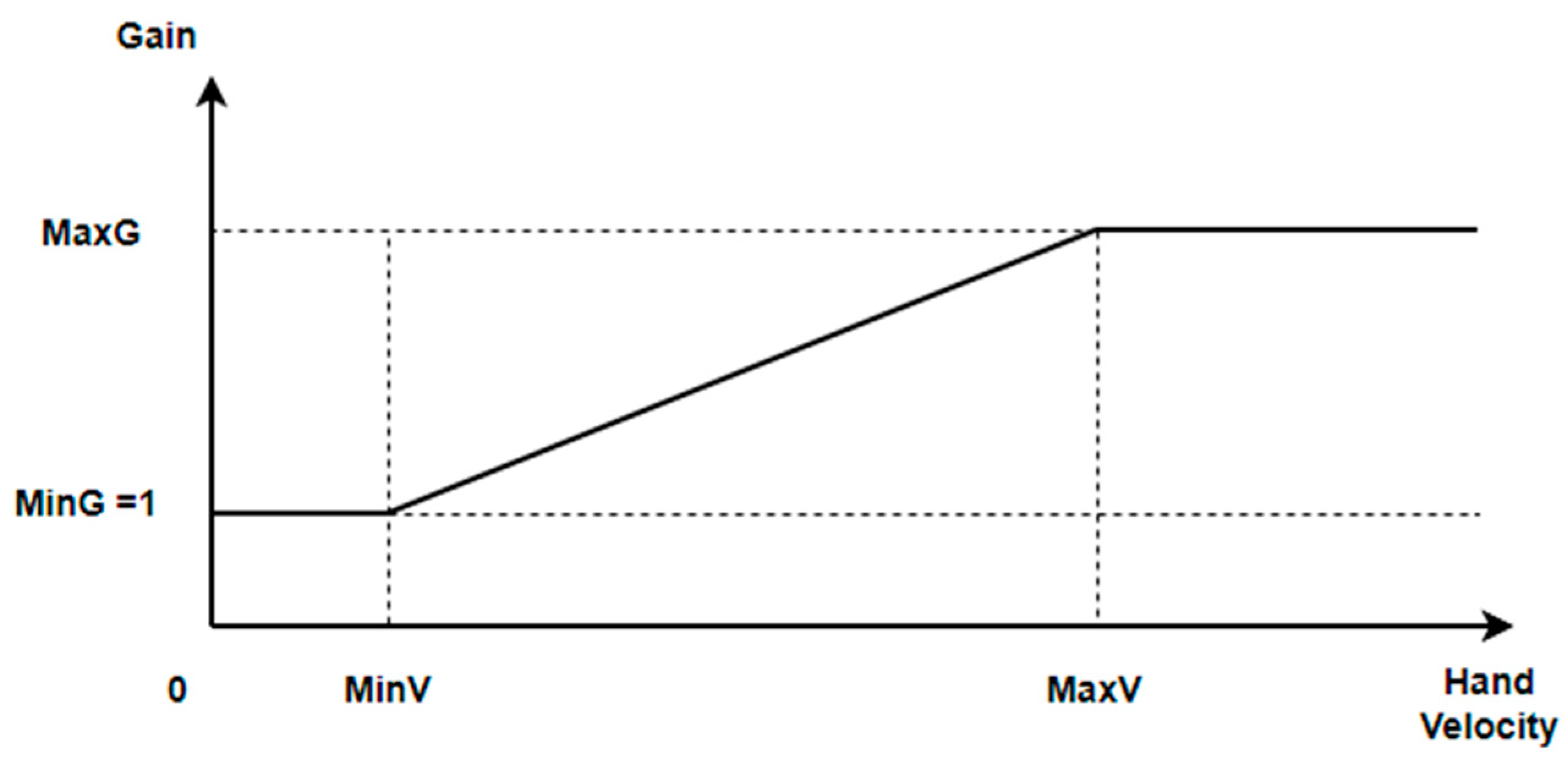
When using a force-feedback device for kinesthetic interaction in a virtual environment, we commonly adopt the unit CD gain (=1), that is, a 1 cm physical movement of the mechanical arm resulting in a 1 cm movement of the HIP, along the x-, y- and z-axes. This ensures that the user has a sufficient workspace (smaller gains would make the device workspace too small and thus difficult to use) and a good control over the HIP [17]. Therefore, we used the unit CD gain as the minimum CD gain (MinG) with a predefined minimal velocity threshold (i.e., MinV = 0.05 m/s) for the dynamic CD gain. The minimum gain was applied when the hand movement speed was at and below this minimal velocity threshold. We did not set a “still” phase for the force-feedback device as in the PRISM technique (i.e., set the minimum gain at 0). This was because of the sensitivity of the force-feedback device, which is already filtering out unwanted movement noise. Following the increasing speed of hand movement, the gain was linearly increased until the hand movement speed reaches the maximum velocity threshold (i.e., MaxV = 0.25 m/s). Then, the maximum gain (MaxG) was applied, even after hand speed exceeded the maximum velocity threshold. In this study, the maximum gain value is varied as an independent variable in the experiment. The interaction mode of velocity-oriented dynamic CD gain is shown in Figure 1.
When using the techniques of PRISM and Adaptive pointing, the offset issue between the positions of the input device and the virtual device was a challenge. Similarly, in kinesthetic interaction, the HIP could be moved out of the explored virtual space because of large gains and then may not be moved back to the original position while using a slow hand speed. This causes an offset between the physical workspace of the force-feedback device and the explored virtual place. We used a simple method to address this issue: establishing an exploration boundary in the virtual environment. First, the exploring virtual space (30 × 18 × 18 cm) with the space center point (x, y, z = 0) was set to match the workspace of the force-feedback device with the gain equal to the minimum gain 1 (the maximum workspace size of the used device could reach 35.5 × 22.8 × 18 cm, according to the official specification [3]), which allowed the HIP to reach any position in the space with slow hand speed. To avoid the HIP moving out of the explored virtual space, we set a boundary for the HIP movement based on the required virtual space. When the HIP moved to the edge of the virtual space, it stopped moving, like the mouse pointer that stops at the boundary of 2D display when we move it out of the display area. In this case, if the HIP was moving fast because of the variable larger gain applied, it would stop at the boundary while the hand was still moving. This process would recover the offset caused by the variable gain. In addition, by establishing this boundary, the user could manually move the HIP to the boundary to match the device workspace with the explored virtual place if necessary.
3.2. Experiment Design
We designed a controlled laboratory experiment that followed a within-subject design. To examine how the different maximum gains of velocity-oriented dynamic CD gain affect kinesthetic interaction, we set six levels for the maximum CD gain (MaxG: 1, 1.5, 2, 2.5, 3 and 3.5) as the experimental conditions. Among them, the unit gain value (i.e., MaxG = 1) was used as the baseline for the experiment. In this case, the maximum gain equaled the minimum gain, which made the dynamic gain system behave as the constant unit gain. This baseline could help explore how the velocity-oriented dynamic CD gain affects user task performance.
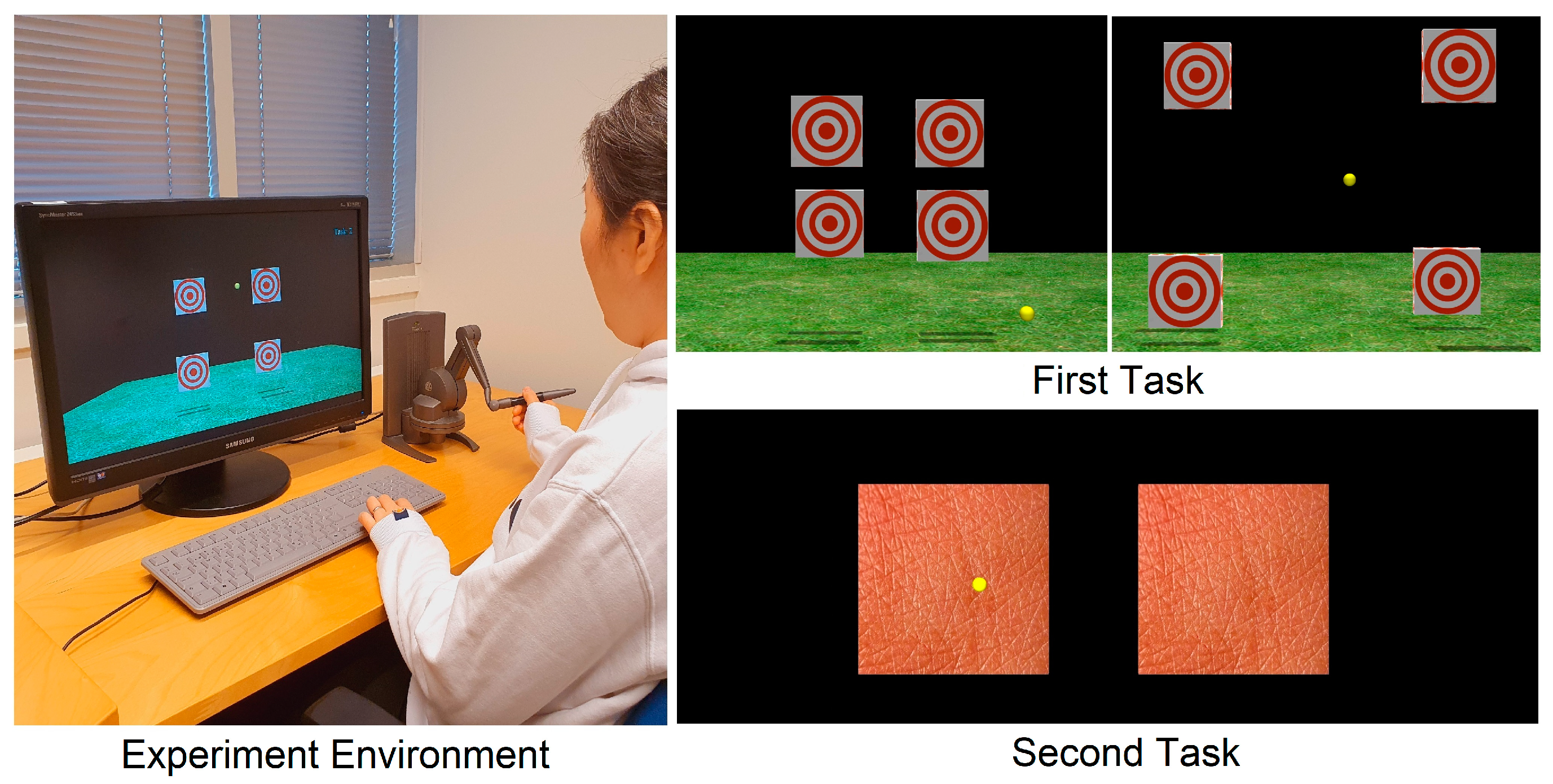
There were two kinesthetic tasks in the experiment, which are shown in the right hand side images of Figure 2. The first task was to explore how dynamic CD gains influenced the interaction speed and positioning accuracy. It required the participants to touch four objects (square shape with the side length 4.5 cm without considering thickness) in the clockwise order (the upper left one was the first one). During the task, they were asked to touch the center part of each object, and each object could be only touched once. In other words, they could not go back to touch the previous one again. All objects were hard objects, and their stiffness was predefined by setting the coefficient (=0.1) with the linear spring law (). Thus, there was no deformation while the user was touching the objects. The system recorded the touch position on each object and the time from touching the first object to touching the fourth one. After touching the fourth object, participants pressed the right arrow key on a keyboard to move to the next trial with another group of four objects. The positions of four objects were changed for each trial. For each gain, there were six trials, and thus six groups of spatial position values were predefined. Each trial randomly selected one group with four position values for the four virtual objects, and the selected group was removed after each selection. In total, each participant completed 36 trials (6 gains × 6 trials each gain = 36 trials).
As shown in the pointing tasks with Fitts’s law, user performance, such as interaction speed, might be influenced by different movement distances and the sizes of targets. We did not directly use the Fitts’s law type of experiment because it is mainly used for measuring interaction speed. In this study, the participants were asked to aim at and touch the center part of the object to collect positioning accuracy data, and thus the target of touching was a point (the center point of the object) instead of the whole square. In addition, while touching, the participants would likely stay for a short time on the touched object to feel the force feedback. These would influence the results while directly using the Fitts’s law type of experiment.
In this study, we varied the spatial positions for each position group to categorize six groups into two levels of reach difficulty as an independent variable for the experiment, that is, easy to reach and difficult to reach (see Figure 2 for the images and Table 1 for the values). We did not directly vary the actual size of objects as a variable because the changed spatial positions of objects along z-axis influenced their visual sizes, and thus changing both real sizes of objects and their depth positions might complicate the variables of the experiment. For simplicity, we only varied the positions of objects along x-, y- and z-axes as the variables for this experimental task. The position values of four objects were selected arbitrarily but their positions formed a circle from the perspective of the user. Three groups of position values that made four objects be far away from each other (along x-, y- and z-axes) were the difficult-to-reach groups. Other three groups of position values that made four objects close to each other were the easy-to-reach groups.
The second task was to examine the effect of dynamic CD gains on touch perception. Softness discrimination was selected as the experimental task because of two reasons. First, softness is one of the important properties of physical objects and softness perception is important for kinesthetic interaction in professional applications, such as medical education and training. Second, soft perception may be more likely affected by this CD gain technique because it highly relies on the user’s hand movement during touching. The participants were asked to compare two soft tissues by touching them and then to select the harder one by pressing arrow keys on a keyboard (i.e., select left tissue by pressing the left arrow key and vice versa). The answers were recorded in the system. After that, a new trial was shown with another group of two tissues. For each trial, the positions of two tissues were unchanged, but they had different softness degrees. We manipulated the softness degrees by changing the stiffness coefficient . For each gain, there were 12 softness discrimination tasks. Thus, each participant completed 72 trials (6 gains × 12 trials for each gain = 72 trials) in total. Like the first task, we predefined 12 groups of softness parameter values (i.e., , ) and categorized them into two levels of perception difficulty, that is, easy to perceive and difficult to perceive (see Table 1 for the values, and switch and for another six trials). This independent variable could help to further explore how the dynamic CD gains affect touch perception. For each gain, each trial randomly selected one group with two softness parameter values for the two tissues, and the selected group would be removed after the selection. In addition, no visual deformation occurred when the user was touching the objects as visual feedback might influence kinesthetic perception (i.e., pseudo-haptic [31,32]) and users’ task performance.
After the two experimental tasks, we interviewed the participants to understand their subjective feelings about the used velocity-oriented dynamic CD gain. The major comments were recorded in a post-test questionnaire.
3.3. Pilot Study
Before the experiment, we conducted a pilot study with four participants who had experience in using grounded force-feedback devices. The purpose was to identify the proper parameter values for the experimental system.
- The minimal and maximum velocity thresholds (i.e., 0.05 m/s and 0.25 m/s) were selected based on the users’ hand movement velocity in the 3D space while they were holding the arm of the force-feedback device. To determine these values, we also considered the velocity values for the PRISM technique as PRISM also relied on the hand movement speed. These two velocity values were verified in the pilot study.
- The size of virtual objects (i.e., 4.5 cm) and their spatial positions (see Table 1) were selected by considering the workspace of the used force-feedback device and the size of 2D screen. They were easy to interact with and simultaneously there were clear differences in horizontal distances (along x- and y-axes) and depths (along z-axis) between the easy-to-reach groups and the difficult-to-reach groups.
- The softness parameter values (see Table 1) were chosen. All the differences in softness degree were perceivable by the participants considering the sensitivity of the force-feedback device and human kinesthetic perception. For the tasks with high perception difficulty, participants had to pay more attention to compare two soft tissues to perceive which one was harder.
After the parameters were fixed, we proceeded to conduct the experiment.
4. Experiment
4.1. Apparatus
We used a MSI GS63VR 7RF laptop as the host computer for the experiment and a Geomagic Touch X device with three degrees of freedom output force [3] as the interaction tool. A Samsung 2493HM monitor was used as the visual display, and a keyboard was used to select the answer and move to next trial. The software development kit was the open-source H3DAPI [33] for both graphics and haptics. The interaction devices and the environment are shown in the left image of Figure 2.
4.2. Participants
We recruited 24 participants from the local university community (16 female and 8 male) and their ages were between 20 and 39 years (M = 26.6, SD = 5.2). All participants reported that they have normal touch sensitivity. Three participants used the left hand as their dominant hand, and others were right-dominant. Five participants had used a similar force-feedback device for 1 to 2 times but with limited experience. Other participants had no user experience with a force-feedback device before the experiment.
4.3. Procedure
The participants were first introduced to the force-feedback device and the experimental study. We did not provide the participants with technical details of velocity-oriented dynamic CD gain and only let them know that the HIP movement would be sensitive to the hand movement because this technical information might influence user behavior in the experiment. All participants signed an informed consent form and filled in the background questionnaire. The force-feedback device was placed on the side of their dominant hand, and they used their non-dominant hand to press the keys on the keyboard to select the answer and move to the next trial. Because of the limited experience of using force-feedback device, all participants had up to five minutes to familiarize themselves with the used experimental devices before the formal experiment.
The participants were asked to finish the first experimental task as accurately and quickly as they could. In the second task, they were only allowed to compare two tissues up to three times. There were six experimental conditions (maximum CD gains) in the experiment and the order of experimental conditions were counter-balanced among the participants. For each CD gain, the participants had up to one minute to familiarize themselves with the used CD gain. Then, they were asked to finish the first experimental task with six trials and then the second task with twelve trials. After that, they could have up to two minutes to rest their hand before the next group of trials. We did not provide any feedback regarding their task performance. After completing the tasks with all CD gains, the participants commented on the technique of velocity-oriented dynamic CD gain, and their comments were recorded in the questionnaire. In total, the experiment time for each participant was approximately one hour. The experiment procedure for participants is shown in Figure 3.
5. Results
To evaluate the interaction efficiency, we collected both task completion time and positioning accuracy for each participant in the first experimental task. Task completion time was measured by the time of touching the first object to the time of touching the fourth object. Positioning accuracy was evaluated by calculating the error distances between the center points of the objects and the participant’s touch points. For each CD gain, there were six trials in total, and we calculated the mean values for both the task completion time and the error distance. In the second task that evaluated touch perception in softness, we calculated the total number of errors each participant made in judging softness for each gain with twelve trials.
We used the Shapiro–Wilk normality test to check all data first. Because the data were not normally distributed (all p < 0.001), we analyzed the data using aligned rank transform (ART) repeated measures non-parametric ANOVA [34]. The post hoc analysis was performed using the Wilcoxon signed-rank test with Holm-modified Bonferroni correction [35] to control family-wise type-1 error. The p values presented in the following sections for post hoc analysis are after Holm-modified Bonferroni correction.
5.1. Task Completion Time
For task completion time, the ART ANOVA test showed that there were statistically significant main effects for CD gains (F (5, 23) = 2.950, p = 0.015) and the levels of reach difficulty (F (1, 23) = 64.797, p < 0.001). However, there was no statistically significant difference for their interaction effect (F (5, 23) = 1.820, p = 0.114).
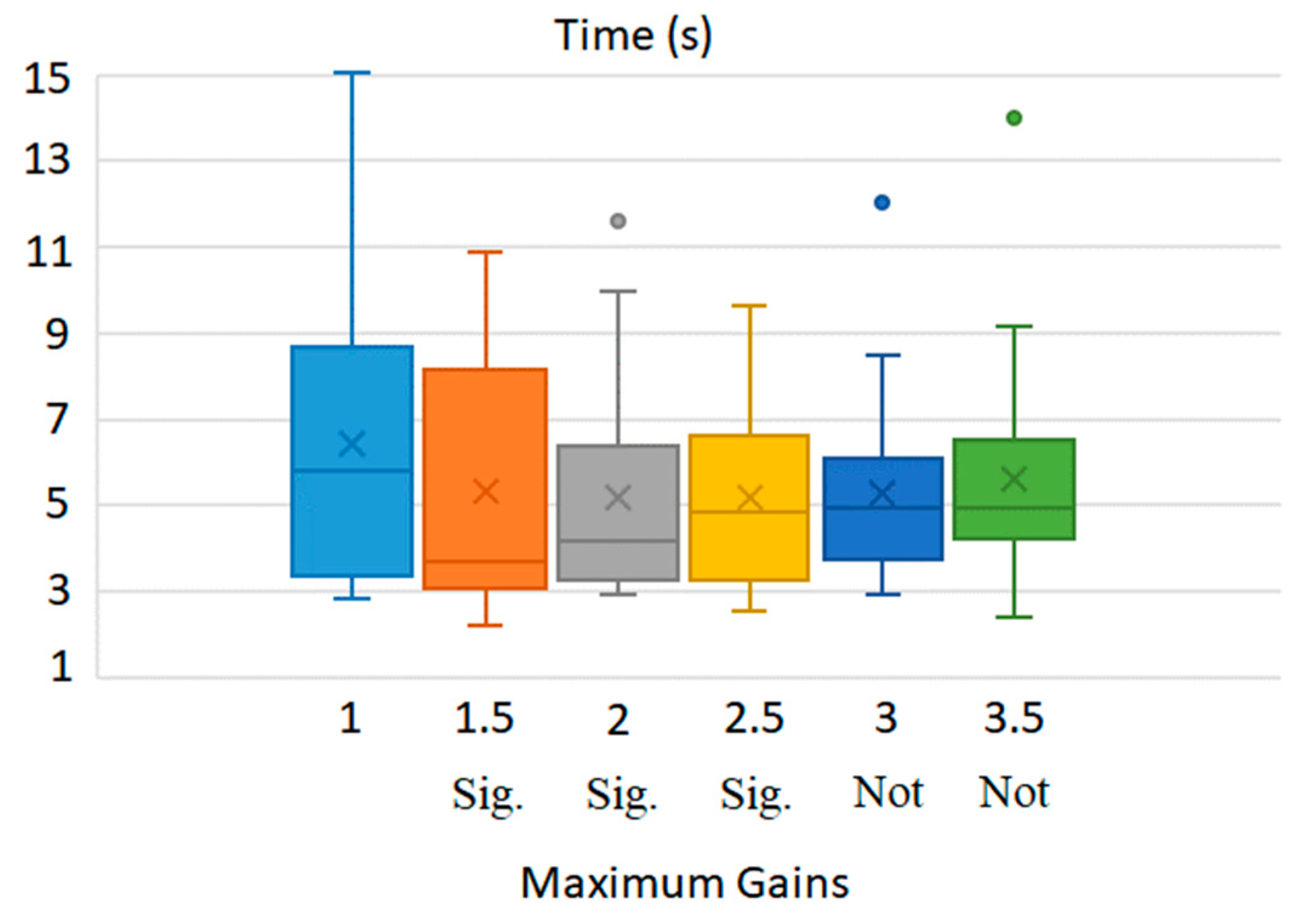
The post hoc analysis with Wilcoxon signed-rank test showed that using the velocity-oriented dynamic CD gain with a maximum gain of 1.5, 2 or 2.5 led to statistically significantly less task completion times than using the unit constant gain (=1). The decrease percentages, respectively, were 17.7% (gain = 1.5), 19.3% (gain = 2) and 19.9% (gain = 2.5). When further increasing the maximum gain (3 or 3.5), there were no significant differences between the velocity-oriented dynamic CD gain and the unit constant gain. Figure 4 shows the boxplot of the task completion times based on different maximum gains. Table 2 shows the mean task completion times, the standard deviation values and the p values from the Wilcoxon signed-rank test. Furthermore, as expected, completion time for the tasks with high reach difficulty (M = 6.08, SD = 2.58) was statistically significantly longer than the one for the tasks with low reach difficulty (M = 4.91, SD = 2.09; Z = −4.286, p < 0.001).
5.2. Positioning Accuracy
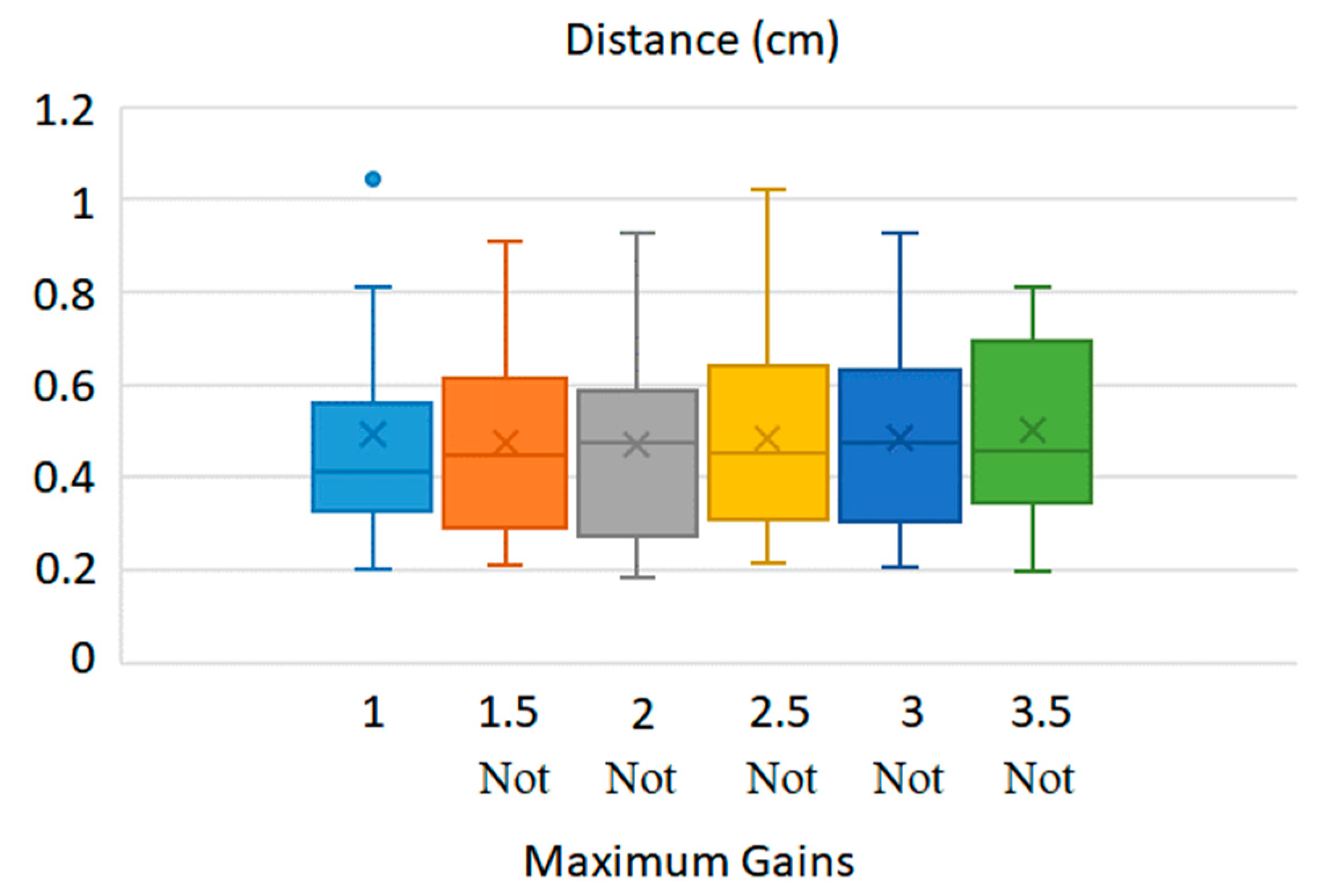
For error distances, The ART ANOVA test showed that there were no statistically significant differences for the different maximum gains, the levels of reach difficulty and their interaction effect. Figure 5 shows the boxplot of the error distances based on maximum gains. Table 3 shows their mean values and standard deviation values.
5.3. Touch Perception
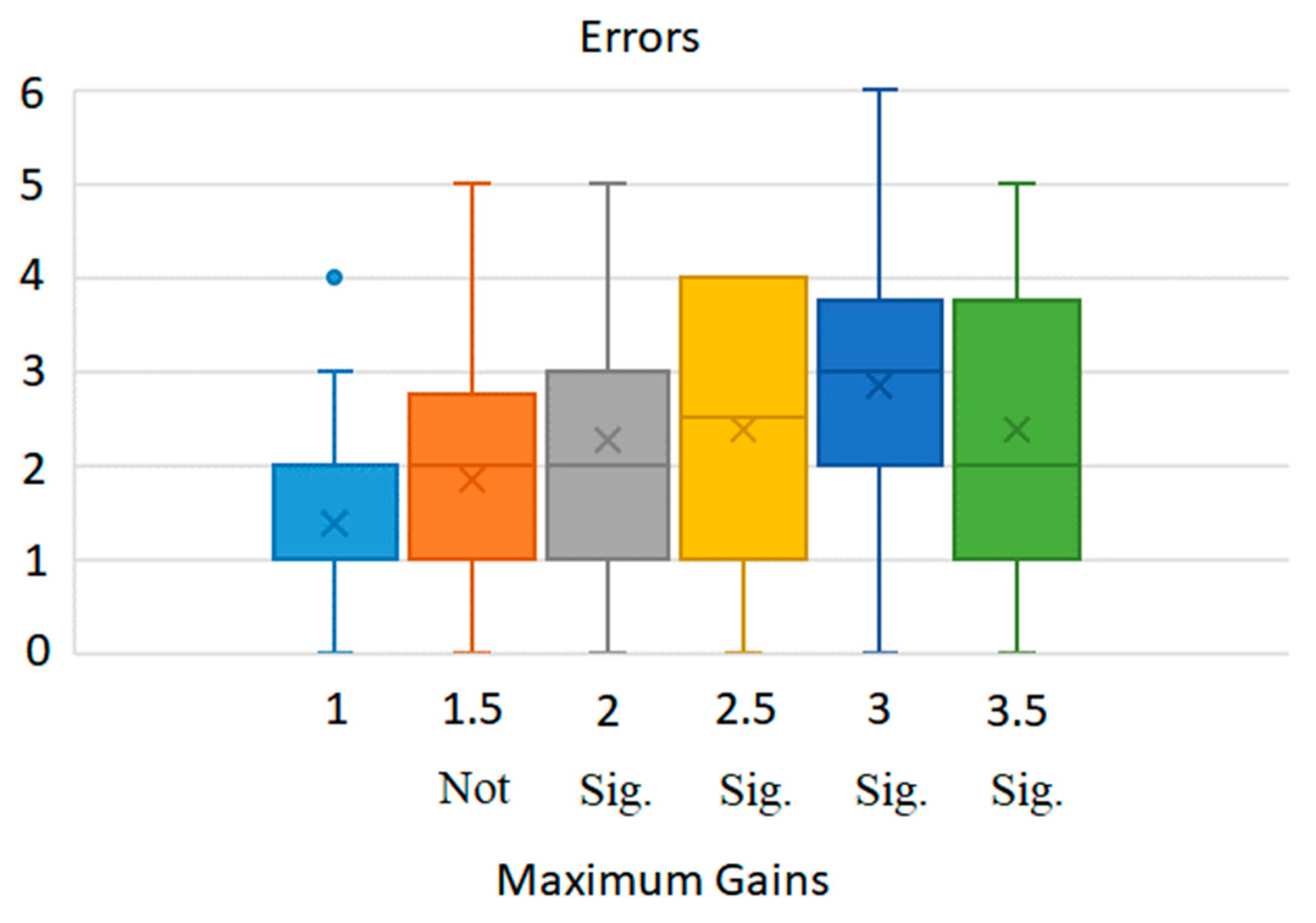
In comparing the softness degrees between two soft tissues, the participants made different numbers of errors with different maximum gains. The ART ANOVA test showed that there were statistically significant differences for the maximum CD gains (F (5, 23) = 5.099, p < 0.001) and the levels of perception difficulty (F (1, 23) = 162.799, p < 0.001), but there was no significant difference for their interaction effect (F (5, 23) = 0.463, p = 0.803).
Wilcoxon signed-rank test demonstrated that using the velocity-oriented dynamic CD gains with a maximum gain of 2, 2.5, 3 or 3.5 led to statistically significantly more errors than using the unit constant gain (=1). However, while using this CD gain technique with the maximum gain 1.5, there was no statistically significant difference. Figure 6 shows the boxplot of the number of errors based on each maximum gain with twelve trials. Table 4 shows their mean values, standard deviation values and p values compared to the baseline condition. In addition, the errors with the perception difficulty showed that the participants made statistically significantly more errors in the tasks with the high perception difficulty (M = 10.2, SD = 3.2) than the tasks with low perception difficulty (M = 2.8, SD = 2.3; Z = −4.269, p < 0.001) out of 36 trials of each perception difficulty level.
5.4. Subjective Response
Through the post-test interview, we collected the participants’ opinions and comments for the velocity-oriented dynamic CD gain. These comments could further demonstrate its strengths and weaknesses in kinesthetic interaction.
P1: “While the point speed got faster and faster, I started to lose control.”
P7: “When the gain was low, I could not do the task as fast as I hoped, but when the gain was very high, I started to overshoot the target.”
P12: “The objects’ softness degrees were felt unstable while the touch point movement was very sensitive.”
P15: “For all tasks, I can just slow down my hand movement for accurate touching.”
P20: “I could control the interaction point well even it was moving quickly, and I can get used to it very fast.”
6. Discussion
The study explored using velocity-oriented dynamic CD gain for kinesthetic interaction while using a grounded force-feedback device as the interaction tool. Two kinesthetic tasks were used in the experiment, respectively, to examine its effects on interaction efficiency and touch perception.
The interaction efficiency was evaluated based on task completion time and positioning accuracy. For the task completion time, the results showed a clear U-shaped relationship between the increasing maximum gain and the task completion time (see Figure 4). The completion time was decreasing while increasing the maximum gain. When the gain reached 2.5 (i.e., 1 cm hand movement in the physical space led to 2.5 cm the HIP movement in the virtual space), the mean completion time reached the lowest value and began to increase. The result of U-shaped relationship is consistent to previous studies that used handheld and pointing devices with constant gains [18,19] or dynamic gains [14]. However, the gains, which lead to the shortest task completion times, are different. When using the mouse with constant gains for pointing-based tasks, the gain that led to the shortest task completion time in Jellinek and Card’s study [18] was 2 and in Lin et al.’s study [19] was between 1 and 2. When using the velocity-oriented dynamic CD gain, the average gain used that led to the shortest completion times was found between 2.2 to 3.6 [14]. For touchscreen-based interfaces, the best gains were found between 2 and 4 [28] or even up to 5 [29]. These results imply that the suitable CD gains varied based on the specific interaction methods and scenarios.
Although user performance as a function of the changing CD gain has not been well concluded in HCI [12], the reason causing the U-shaped relationship can be concluded; that is, when the gain becomes too large, the users cannot have sufficient precision to control their hand movements and thus affects the task completion time. This is also evident from the participants’ comments in this study. Most participants mentioned that while the maximum CD gain was increased to a certain value, they started to lose the control of the HIP and overshoot the target.
However, the positioning accuracy in our case was not affected by the reduced control over the HIP while using the velocity-oriented dynamic CD gain. The participants were asked to touch the center parts of the objects in the 3D space, and the results showed that the participants could maintain the positioning accuracy regardless of the changing maximum gain (see Figure 5) and the spatial positions of the objects. Kinesthetic interaction is a 3D exploration. The participants required to move the HIP along the x- and y-axes to the target and then reach (along z-axis) it for the touch behavior. It is known that reaching a target in 3D space is highly affected by the spatial position of the target, and the users would significantly slow their hand speed during the reaching process [36]. Following the decreasing hand speed, the applied gain would decrease to the minimum gain (=1), which allowed the participants to have good control over the HIP [17]. This may be the main reason that there were no statistically significant differences for the positioning accuracy with different maximum gains and different reach difficulties.
In addition to the interaction efficiency, the second experimental task investigated the effects of velocity-oriented dynamic CD gains on human touch perception. The results showed that using dynamic CD gains led to different numbers of task errors in softness discrimination (see Figure 6), which indicated that it could affect the participants’ touch perception. When the participants used this technique to touch soft tissues, a changing velocity of hand movement would lead to a dynamic CD gain and thus a dynamic touch depth of the HIP. Therefore, the force feedback from the tissue that indicated its softness degrees was changed based on the touch depth, which might affect touch perception.
This experiment demonstrated how the different gain ranges (from the minimum gain to the maximum gain) of velocity-oriented dynamic CD gain affects touch perception. The results showed that the CD gain technique with a small gain range (from 1 to 1.5) would not statistically significantly affect the participants’ touch perception, whereas with larger gain ranges (from 1 to 2, 2.5, 3 or 3.5), the CD gain technique negatively affected touch perception. This was also confirmed by the participants. They reported that while the HIP was very sensitive (i.e., using large maximum gains), the force feedback was felt unstable. In addition, according to the results with the variable of perception difficulty, the study demonstrated that large gain ranges, which are presented in the study, could still be suitable for the kinesthetic tasks that do not need a high level of perception accuracy. As shown in the results, the mean number of errors in the easy-to-perceive tasks with all examined gains was 2.8, whereas the mean number in the difficult-to-perceive tasks was 10.2, each out of 36 trials.
This study made the following contributions. First, the feasibility of using the velocity-oriented dynamic CD gain for kinesthetic interaction has been demonstrated. The task completion time while using the technique could be reduced approximately 20% according to the experiment results (19.3% at gain 2; 19.9% at gain 2.5). Simultaneously, using this dynamic CD gain could maintain a good positioning accuracy for kinesthetic interaction, even with large maximum gains. Previous pointing-based studies that adopted the velocity-based dynamic CD gain could improve the interaction speed but suffered from the low task accuracy (e.g., [14]), and other techniques were developed to maintain a good level of task accuracy, but the interaction speed had not improved much (e.g., [15,16]). In our case, this technique could improve the interaction efficiency overall (i.e., increasing interaction speed and maintaining positioning accuracy), which demonstrated the strengths of the velocity-oriented dynamic CD gain for kinesthetic interaction.
Second, the present study experimentally examined the effects of this dynamic CD gain technique on human touch perception. Although the results showed a tradeoff between interaction efficiency and touch perception, this technique could still be used to improve user performance in kinesthetic tasks that required a high perception accuracy by only slightly increasing the range between the minimum gain and the maximum gain. The velocity-oriented dynamic CD gain is a promising interaction method for kinesthetic interaction overall, which does not require high perception accuracy.
There are a few limitations for the study. First, the minimum gain for velocity-oriented dynamic CD gain was set at the unit value (=1). It could maintain a good user control over the HIP and thus have the potential to maintain positioning accuracy. The resulting workspace size of the force-feedback device was sufficient for the applications using a normal 2D display. Increasing the minimum gain (>1) could increase the workspace size of the force-feedback device in the virtual environment and make it suitable for large environments provided by, for example, a VR headset. Future study could examine the velocity-oriented dynamic CD gain on kinesthetic interaction in such scenarios by increasing the minimum gain.
Second, the study was conducted based on two simple kinesthetic tasks to preliminarily examine the feasibility of dynamic CD gain on kinesthetic interaction. The results indicated that the increased maximum gains could improve kinesthetic interaction. However, the reach difficulty levels (distances and visual sizes) had no interaction effects with the used gains. This may be due to the space limitation while using a normal 2D display, that is, the limited distances (along x- and y-axes) and object depths (along z-axis). Additionally, the actual sizes of objects were not changed during the experiment for simplicity. Future studies can test this CD gain technique with a more focused comparison on this area while using, for example, a VR headset.
Third, a softness discrimination task was used as the experimental task to explore the effects of velocity-oriented dynamic CD gain on touch perception. Detecting other physical properties could also be affected by this technique. For example, detecting the smoothness of an object requires hand movement along the object surface, which could be affected by the dynamic gain. Future study can investigate the effects of this CD gain technique on perceiving other physical properties.
Fourth, the kinesthetic device used in the experiment was a currently popular force-feedback device that supports single-point haptic interactions. The effects of dynamic CD gain for such single-point kinesthetic devices have been demonstrated in this study. However, its effects for multiple-point haptic interaction were not examined. To explore this, advanced kinesthetic devices, such as HaptX gloves, which support multi-point interaction, are needed. This gain technique is also promising for those multiple-point haptic devices by applying the dynamic gain for the hand or even each finger motion. We purpose this for future study.
Fifth, the interaction boundary was used to recover the offset between the physical device workspace and the required virtual space caused by the dynamic CD gain, and the participants did not report any issue during the experiment. However, we did not directly test the boundary as the virtual space matched the device workspace with the minimum gain (=1). Additionally, the experiment time was short and accumulated offset may be an issue for a prolonged interaction. Although the user could manually recover the offset by moving the HIP to the interaction boundary, the user performance and experience may be influenced during this process. Like the PRISM technique and Adaptive pointing, which recovered the offset by applying a large maximum gain, this method could also be suitable for kinesthetic interaction by using a large gain to move the HIP back while it is out of the required virtual space. Future studies could explore this area.
7. Conclusions
Velocity-oriented dynamic CD gain is a popular interaction technique for improving user performance in pointing-based computer tasks. This study was the first of its kind to extend this technique to the context of kinesthetic interaction that uses a grounded force-feedback device as the interaction tool. The results showed that velocity-oriented dynamic CD gain could improve interaction efficiency overall. Although touch perception could be affected by the high gain used, the interaction technique shows promise. It is particularly suitable for kinesthetic interaction in the cases that do not have the requirement for high perception accuracy. This study demonstrated the feasibility of using the velocity-oriented dynamic CD gain for kinesthetic interaction, and future studies could examine, for example, the effects of dynamic CD gain on different kinesthetic perception tasks using different kinesthetic devices and the performance of this gain technique for kinesthetic interaction in a large VR environment provided by a VR headset.
Author Contributions
Conceptualization, Z.L.; Methodology, Z.L.; Software, Z.L.; Validation, Z.L. and J.K.; Formal analysis, Z.L.; Investigation, Z.L.; Resources, J.K. and R.R.; Data curation, Z.L.; Writing—original draft, Z.L.; Writing—review & editing, Z.L., J.K. and R.R.; Visualization, Z.L.; Supervision, R.R.; Project administration, R.R.; Funding acquisition, R.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Academy of Finland with grant number 345448.
Institutional Review Board Statement
The study was conducted according to the guidelines of the Declaration of Helsinki. Ethical review and approval were waived for this study, due to nature of the experimental tasks and the participant population.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to participants’ personal information.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Saddik, A.E.; Orozco, M.; Eid, M.; Cha, J. Haptics Technologies. Bringing Touch to Multimedia; Springer: Berlin, Germany, 2011. [Google Scholar] [CrossRef]
- HaptX Gloves. Available online: https://haptx.com/ (accessed on 27 November 2022).
- Geomagic Touch Haptic Device. Available online: https://www.3dsystems.com/haptics-devices/touch-x (accessed on 27 November 2022).
- Force Dimension Omega Device. Available online: https://www.forcedimension.com/products (accessed on 27 November 2022).
- Massie, T.H.; Salisbury, J.K. The Phantom Haptic Interface: A Device for Probing Virtual Objects. In Proceedings of the ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Chicago, IL, USA, 13–18 November 1994. [Google Scholar]
- Read, A.; Ritchie, J.; Lim, T. A UNITY sketch based modelling environment for virtual assembly and machining to evaluate DFMA metrics. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016. [Google Scholar] [CrossRef] [Green Version]
- Licona, A.R.; Liu, F.; Pinzon, D.; Torabi, A.; Boulanger, P.; Lelevé, A.; Moreau, R.; Pham, M.T.; Tavakoli, M. Applications of Haptics in Medicine. In Haptic Interfaces for Accessibility, Health, and Enhanced Quality of Life; McDaniel, T., Panchanathan, S., Eds.; Springer: Cham, Germany, 2020; pp. 183–214. [Google Scholar] [CrossRef]
- Kinnison, T.; Forrest, N.D.; Frean, S.P.; Baillie, S. Teaching bovine abdominal anatomy: Use of a haptic simulator. Anat. Sci. Educ. 2009, 2, 280–285. [Google Scholar] [CrossRef] [PubMed]
- Okamura, A.M. Methods for haptic feedback in teleoperated robot-assisted surgery. Ind. Robot Int. J. 2004, 31, 499–508. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Medellín-Castillo, H.I.; Govea-Valladares, E.H.; Pérez-Guerrero, C.N.; Gil-Valladares, J.; Lim, T.; Ritchie, J.M. The evaluation of a novel haptic-enabled virtual reality approach for computer-aided cephalometry. Comput. Meth. Prog. Bio. 2016, 130, 46–53. [Google Scholar] [CrossRef]
- Kangas, J.; Li, Z.; Raisamo, R. Expert evaluation of haptic virtual reality user interfaces for medical landmarking. In Proceedings of the CHI Conference on Human Factors in Computing Systems Extended Abstracts, New Orleans, AK, USA, 29 April–5 May 2022. [Google Scholar] [CrossRef]
- Argelaguet, F.; Andujar, C. A survey of 3D object selection techniques for virtual environments. Comput. Graph. 2013, 37, 121–136. [Google Scholar] [CrossRef] [Green Version]
- Casiez, G.; Roussel, N. No more bricolage!: Methods and Tools to Characterize, Replicate and Compare Pointing Transfer Functions. In Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology, Santa Barbara, CA, USA, 16–19 October 2011. [Google Scholar] [CrossRef]
- Casiez, G.; Vogel, D.; Balakrishnan, R.; Cockburn, A. The impact of control-display gain on user performance in pointing tasks. Hum.-Comput. Interact. 2008, 23, 215–250. [Google Scholar] [CrossRef]
- Frees, S.; Kessler, G.D. Precise and rapid interaction through scaled manipulation in immersive virtual environments. In Proceedings of the IEEE Virtual Reality 2005, Bonn, Germany, 12–16 March 2005. [Google Scholar] [CrossRef]
- König, W.A.; Gerken, J.; Dierdorf, S.; Reiterer, H. Adaptive pointing—Design and evaluation of a precision enhancing technique for absolute pointing devices. In Proceedings of the IFIP Conference on Human-Computer Interaction, Uppsala, Sweden, 24–28 August 2009. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Akkil, D.; Raisamo, R. The impact of control-display gain in kinesthetic search. In Proceedings of the 12th International Conference on Haptics: Science, Technology, Applications, Leiden, The Netherlands, 6–9 September 2020. [Google Scholar] [CrossRef]
- Jellinek, H.D.; Card, S.K. Powermice and user performance. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Seattle, DC, USA, 1–5 April 1990. [Google Scholar] [CrossRef]
- Lin, M.L.; Radwin, R.G.; Vanderheiden, G.C. Gain effects on performance using a head-controlled computer input device. Ergonomics 1992, 35, 159–175. [Google Scholar] [CrossRef] [PubMed]
- Teklemariam, H.G.; Das, A.K. A case study of phantom omni force feedback device for virtual product design. Int. J. Interact. Des. Manuf. 2017, 11, 881–892. [Google Scholar] [CrossRef]
- Ribeiro, M.L.; Lederman, H.M.; Elias, S.; Nunes, F.L.S. Techniques and devices used in palpation simulation with haptic feedback. ACM Comput. Surv. 2017, 49, 1–28. [Google Scholar] [CrossRef]
- Ortmaier, T.; Deml, B.; Kübler, B.; Passig, G.; Reintsema, D.; Seibold, U. Robot assisted force feedback surgery. In Advances in Telerobotics; Springer Tracts in Advanced Robotics; Ferre, M., Buss, M., Eds.; Springer: Berlin, Germany, 2007; Volume 31, pp. 361–379. [Google Scholar] [CrossRef]
- Li, Z.; Kiiveri, M.; Rantala, J.; Raisamo, R. Evaluation of haptic virtual reality user interfaces for medical marking on 3D models. Int. J. Hum. Comput. Stud. 2021, 147, 102561. [Google Scholar] [CrossRef]
- Hinckley, K.; Tullio, J.; Pausch, R.; Proffitt, D.; Kassell, N. Usability analysis of 3D rotation techniques. In Proceedings of the 10th Annual ACM Symposium on User Interface Software and Technology, Banff, Canada, 14–17 October 1997. [Google Scholar] [CrossRef]
- Bowman, D.A.; Kruijff, E., Jr.; LaViola, J.J.; Poupyrev, I. 3D User Interfaces: Theory and Practice; Addison-Wesley Professional: Boston, MA, USA, 2004. [Google Scholar]
- Kim, H.; Choi, Y. Performance comparison of user interface devices for controlling mining software in virtual reality environments. Appl. Sci. 2019, 9, 2584. [Google Scholar] [CrossRef] [Green Version]
- Johnsgard, T. Fitts’ law with a virtual reality glove and a mouse: Effects of gain. In Proceedings of the Graphics Interface 1994, Banff, AB, Canada, 18–20 May 1994. [Google Scholar] [CrossRef]
- Accot, J.; Zhai, S. Scale effects in steering law tasks. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Seattle, DC, USA, 31 March–5 April 2001. [Google Scholar] [CrossRef]
- Kwon, S.; Choi, E.; Chung, M.K. Effect of control-to-display gain and movement direction of information spaces on the usability of navigation on small touch-screen interfaces using tap-n-drag. Int. J. Ind. Ergon. 2011, 41, 322–330. [Google Scholar] [CrossRef]
- Poupyrev, I.; Billinghurst, M.; Weghorst, S.; Ichikawa, T. The go-go interaction technique: Non-linear mapping for direct manipulation in VR. In Proceedings of the 9th Annual ACM Symposium on User Interface Software and Technology, Seattle, DC, USA, 6–8 November 1998. [Google Scholar] [CrossRef]
- Lecuyer, A.; Coquillart, S.; Kheddar, A.; Richard, P.; Coiffet, P. Pseudo-haptic feedback: Can isometric input devices simulate force feedback? In Proceedings of the IEEE Virtual Reality 2000, New Brunswick, NJ, USA, 18–22 March 2000. [Google Scholar] [CrossRef] [Green Version]
- Samad, M.; Gatti, E.; Hermes, A.; Benko, H.; Parise, C. Pseudo-Haptic Weight. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019. [Google Scholar] [CrossRef]
- H3D API. Available online: https://h3d.org/ (accessed on 27 November 2022).
- Wobbrock, J.O.; Findlater, L.; Gergle, D.; Higgins, J.J. The aligned rank transform for nonparametric factorial analyses using only ANOVA procedures. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011. [Google Scholar] [CrossRef] [Green Version]
- Holm, S. A simple sequentially rejective multiple test procedure. Scand. J. Stat. 1979, 6, 65–70. Available online: https://www.jstor.org/stable/4615733 (accessed on 27 November 2022).
- Berthier, N.E.; Clifton, R.K.; Gullapalli, V.; McCall, D.D.; Robin, D.J. Visual information and object size in the control of reaching. J. Mot. Behav. 1996, 28, 187–197. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Interaction mode of velocity-oriented dynamic CD gain for kinesthetic interaction with a force-feedback device.
Figure 1.
Interaction mode of velocity-oriented dynamic CD gain for kinesthetic interaction with a force-feedback device.

Figure 2.
Experiment environment with two kinesthetic tasks shown on the display screen, and the left image of the first task is an example of the easy-to-reach task and the right one is an example of the difficult-to-reach task.
Figure 2.
Experiment environment with two kinesthetic tasks shown on the display screen, and the left image of the first task is an example of the easy-to-reach task and the right one is an example of the difficult-to-reach task.

Figure 3.
Experiment procedure for each participant.

Figure 4.
Task completion times based on the maximum gains (the line in the boxplot is the median value and the cross mark is the mean value).
Figure 4.
Task completion times based on the maximum gains (the line in the boxplot is the median value and the cross mark is the mean value).

Figure 5.
Error distances based on the maximum CD gains.

Figure 6.
Number of errors committed by the participants based on the maximum gains.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Values for the parameters in the two experimental tasks.
| The First Task | The Second Task | ||
|---|---|---|---|
| Position Values (x, y, z) | Levels | Softness Parameter (k) | Levels |
| (0.08, 0.06, 0.06), (0.08, −0.06, 0.04) (−0.08, 0.06, 0.04), (−0.08, −0.06, 0.06) | Easy to reach | = 0.0585, = 0.0405 = 0.018 | Easy to perceive |
| (0.1, 0.08, 0.04), (0.1, −0.08, 0.06) (−0.1, 0.08, 0.06), (−0.1, −0.08, 0.04) | Easy to reach | = 0.057, = 0.042 = 0.015 | Easy to perceive |
| (0.12, 0.1, 0.06), (0.12, −0.1, 0.04) (−0.12, 0.1, 0.04), (−0.12, −0.1, 0.06) | Easy to reach | = 0.0555, = 0.0435 = 0.012 | Easy to perceive |
| (0.15, 0.12, 0.07), (0.15, −0.12, 0.03) (−0.15, 0.12, 0.03), (−0.15, −0.12, 0.07) | Difficult to reach | = 0.054, = 0.045 = 0.009 | Difficult to perceive |
| (0.17, 0.14, 0.03), (0.17, −0.14, 0.07) (−0.17, 0.14, 0.07), (−0.17, −0.14, 0.03) | Difficult to reach | = 0.0525, = 0.0465 = 0.006 | Difficult to perceive |
| (0.19, 0.16, 0.07), (0.19, −0.16, 0.03) (−0.19, 0.16, 0.03), (−0.19, −0.16, 0.07) | Difficult to reach | = 0.051, = 0.048 = 0.003 | Difficult to perceive |
Table 2.
Mean task completion times with standard deviation values and results of Wilcoxon signed-rank test.
Table 2.
Mean task completion times with standard deviation values and results of Wilcoxon signed-rank test.
| Task Completion Time (Seconds) | Maximum Gain 1.5 | Maximum Gain 2 | Maximum Gain 2.5 | Maximum Gain 3 | Maximum Gain 3.5 |
| M = 5.28 SD = 2.84 | M = 5.18 SD = 2.43 | M = 5.14 SD = 2.12 | M = 5.27 SD = 2.04 | M = 5.57 SD = 2.42 | |
| Baseline maximum gain 1 | Z = −4.171 p < 0.001 | Z = −2.600 p = 0.036 | Z = −2.571 p = 0.030 | Z = −1.314 p = 0.378 | Z = −0.857 p = 0.391 |
| M = 6.42 SD = 3.61 |
Table 3.
Mean error distances with standard deviation values.
| Error Distances (cm) | Maximum Gain 1 | Maximum Gain 1.5 | Maximum Gain 2 | Maximum Gain 2.5 | Maximum Gain 3 | Maximum Gain 3.5 |
| M = 0.49 SD = 0.27 | M = 0.47 SD = 0.21 | M = 0.47 SD = 0.20 | M = 0.48 SD = 0.22 | M = 0.48 SD = 0.20 | M = 0.50 SD = 0.19 |
Table 4.
Mean numbers of errors with standard deviation values and results of Wilcoxon signed-rank test.
Table 4.
Mean numbers of errors with standard deviation values and results of Wilcoxon signed-rank test.
| Number of Errors | Maximum Gain 1.5 | Maximum Gain 2 | Maximum Gain 2.5 | Maximum Gain 3 | Maximum Gain 3.5 |
| M = 1.8 SD = 1.2 | M = 2.3 SD = 1.3 | M = 2.4 SD = 1.5 | M = 2.8 SD = 1.6 | M = 2.4 SD = 1.3 | |
| Baseline maximum gain 1 | Z = −1.669 p = 0.095 | Z = −2.578 p = 0.040 | Z = −2.462 p = 0.028 | Z = −3.200 p = 0.005 | Z = −2.572 p = 0.030 |
| M = 1.4 SD = 1.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, Z.; Kangas, J.; Raisamo, R. Velocity-Oriented Dynamic Control–Display Gain for Kinesthetic Interaction with a Grounded Force-Feedback Device. Multimodal Technol. Interact. 2023, 7, 12. https://doi.org/10.3390/mti7020012
AMA Style
Li Z, Kangas J, Raisamo R. Velocity-Oriented Dynamic Control–Display Gain for Kinesthetic Interaction with a Grounded Force-Feedback Device. Multimodal Technologies and Interaction. 2023; 7(2):12. https://doi.org/10.3390/mti7020012
Chicago/Turabian StyleLi, Zhenxing, Jari Kangas, and Roope Raisamo. 2023. "Velocity-Oriented Dynamic Control–Display Gain for Kinesthetic Interaction with a Grounded Force-Feedback Device" Multimodal Technologies and Interaction 7, no. 2: 12. https://doi.org/10.3390/mti7020012