
Application of Piezoelectric PLLA Braided Cord as Wearable Sensor to Realize Monitoring System for Indoor Dogs with Less Physical or Mental Stress
 ,
,
Abstract
:1. Introduction
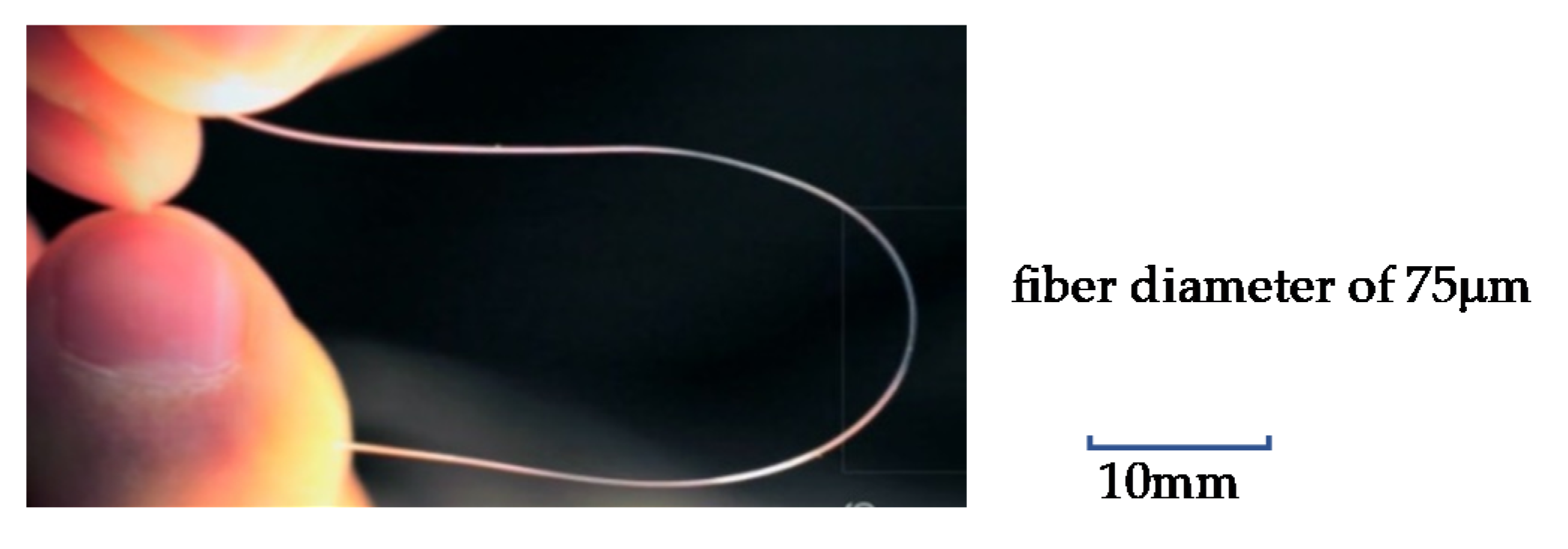
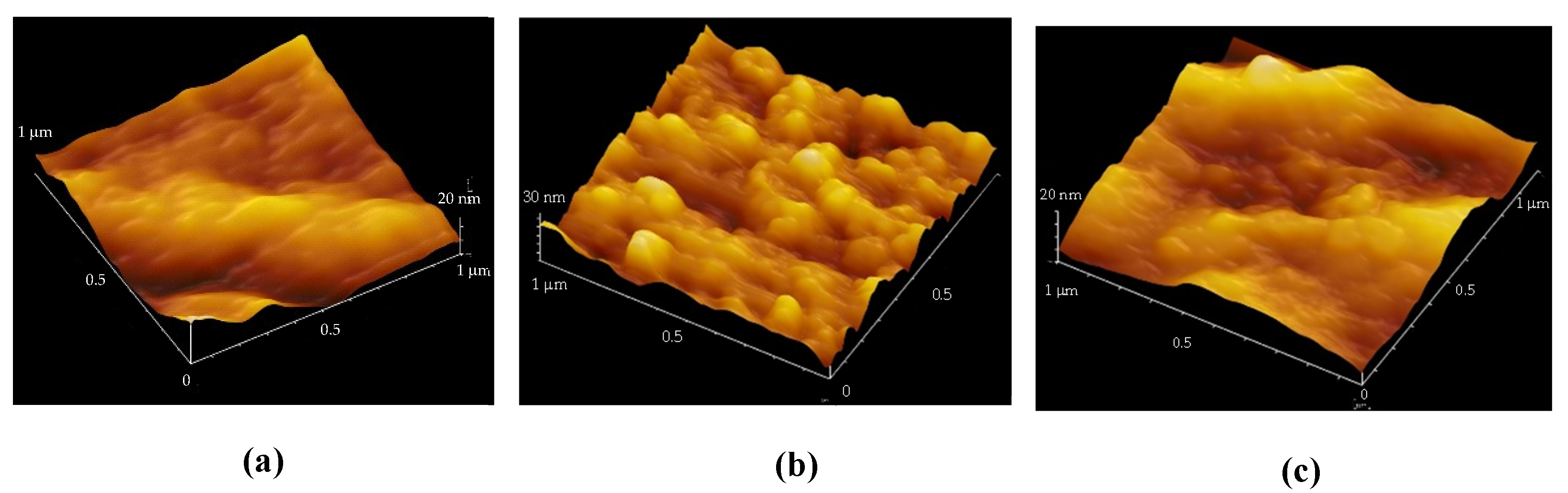
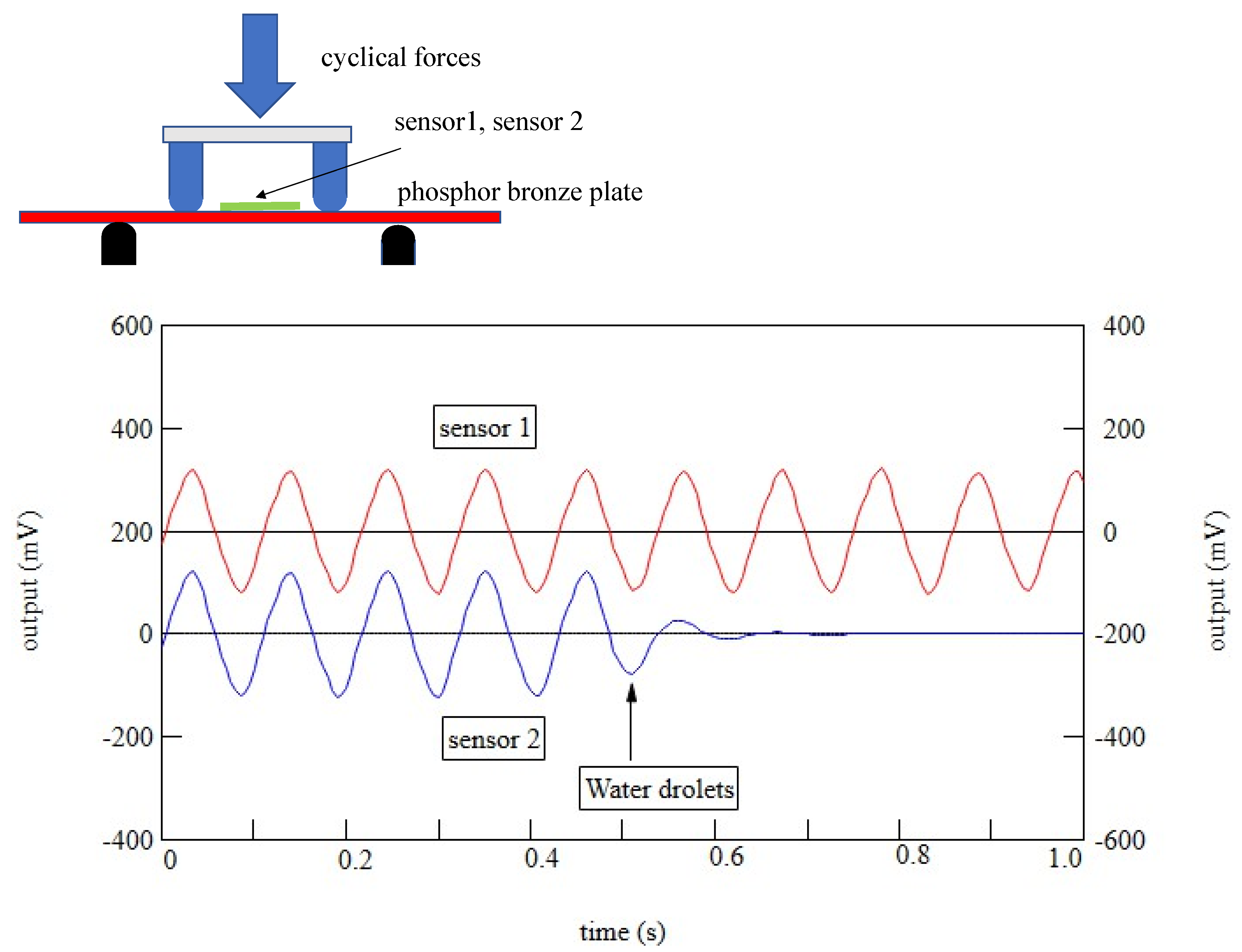
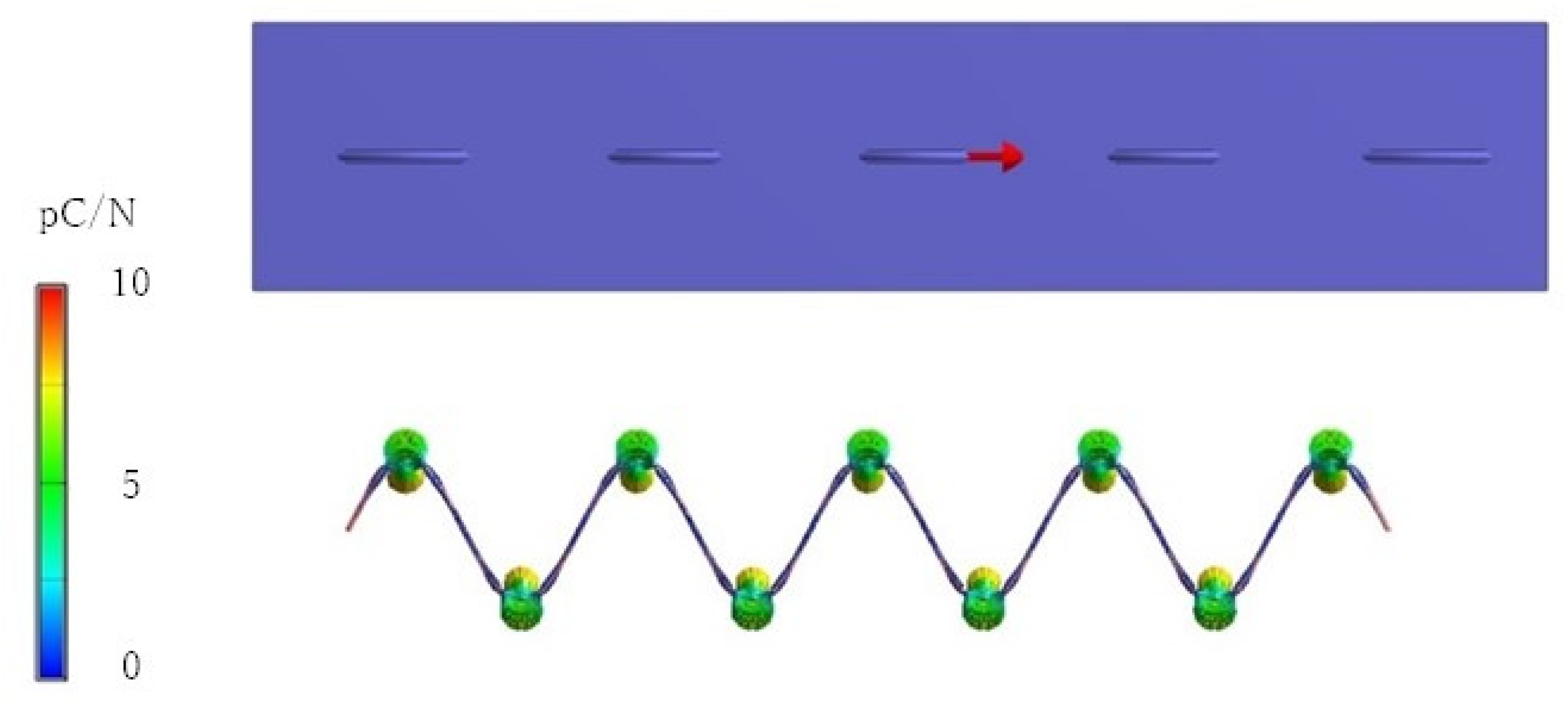
2. Improved Piezoelectric Properties While Maintaining High Mechanical Durability
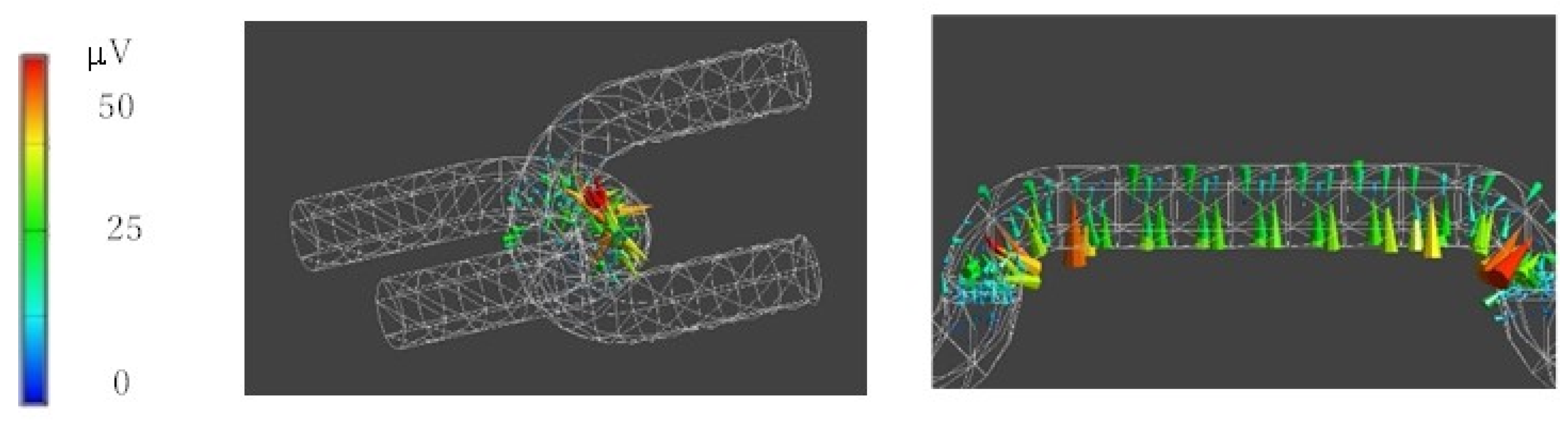
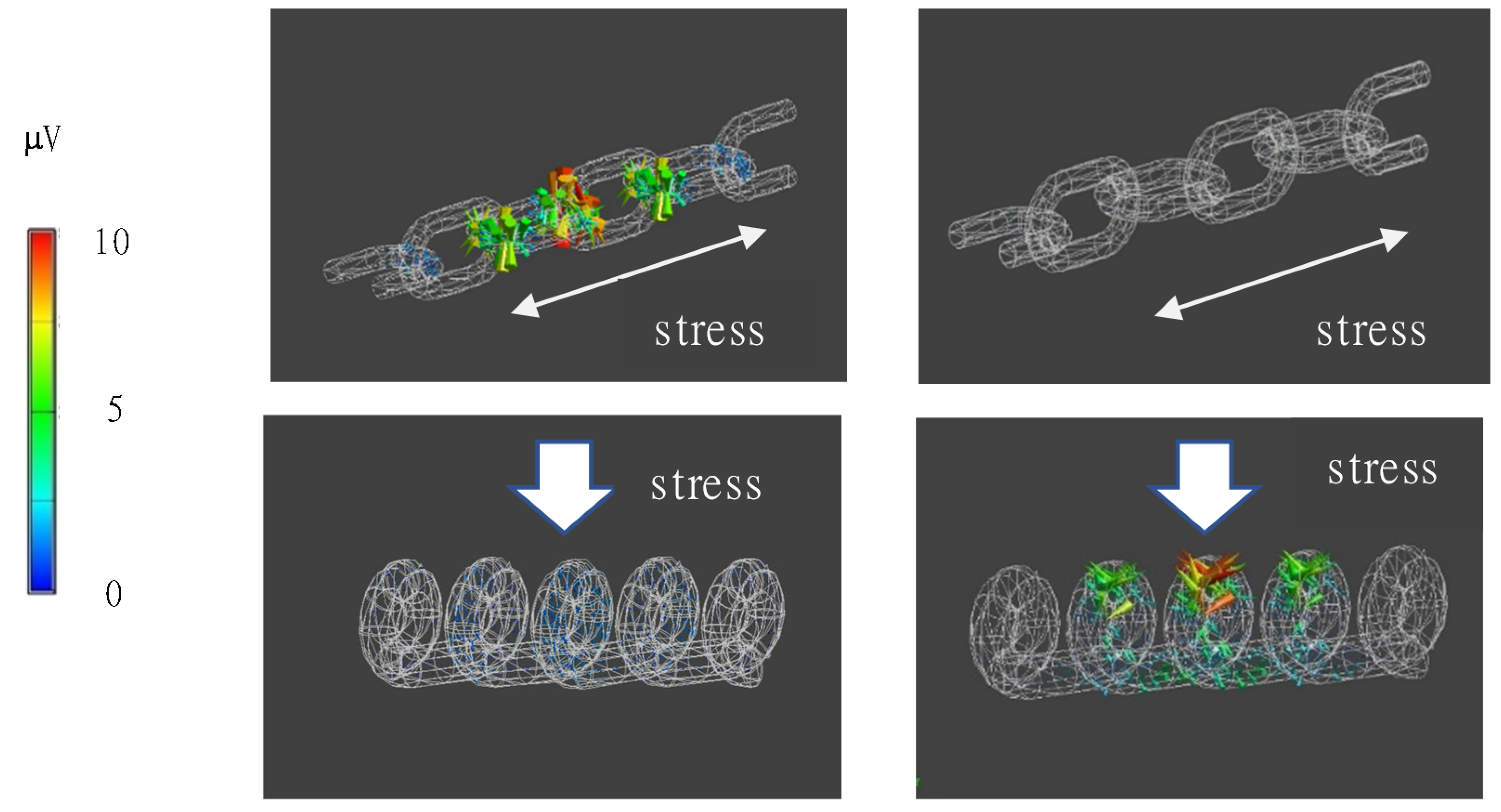
3. Finite Element Method (FEM)
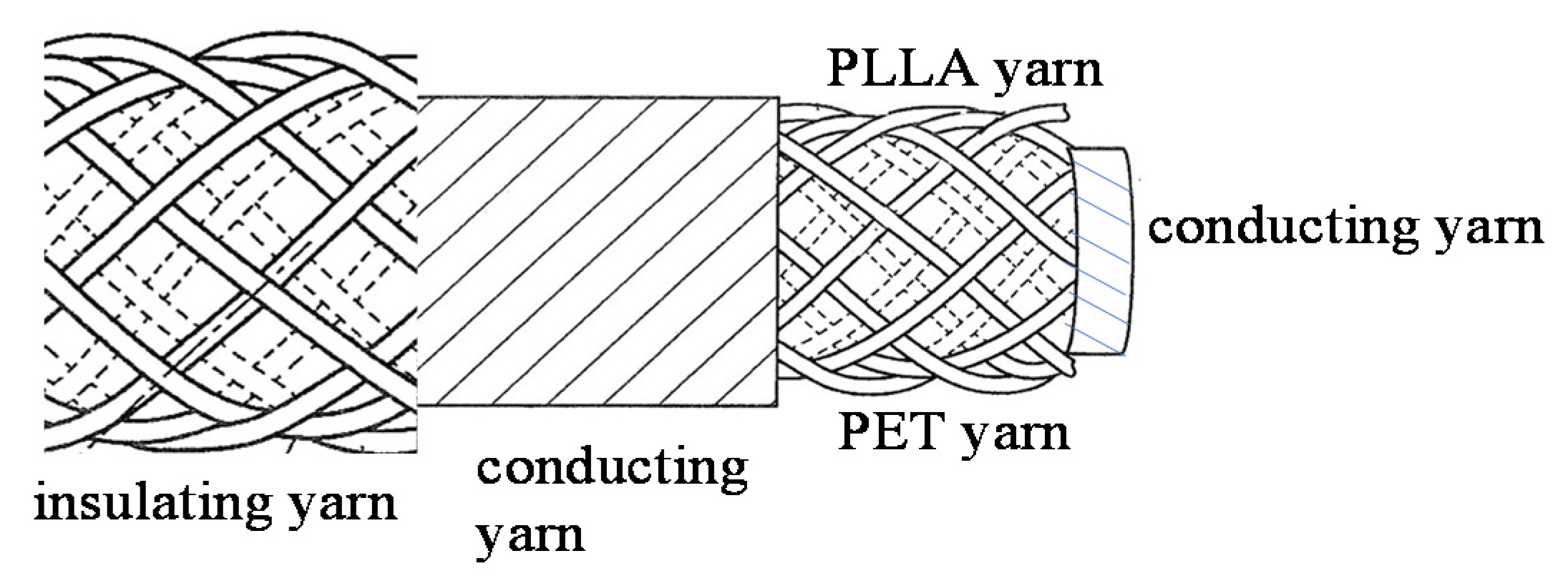
4. Design of Sensor for Indoor Dogs Using Piezoelectric Braid
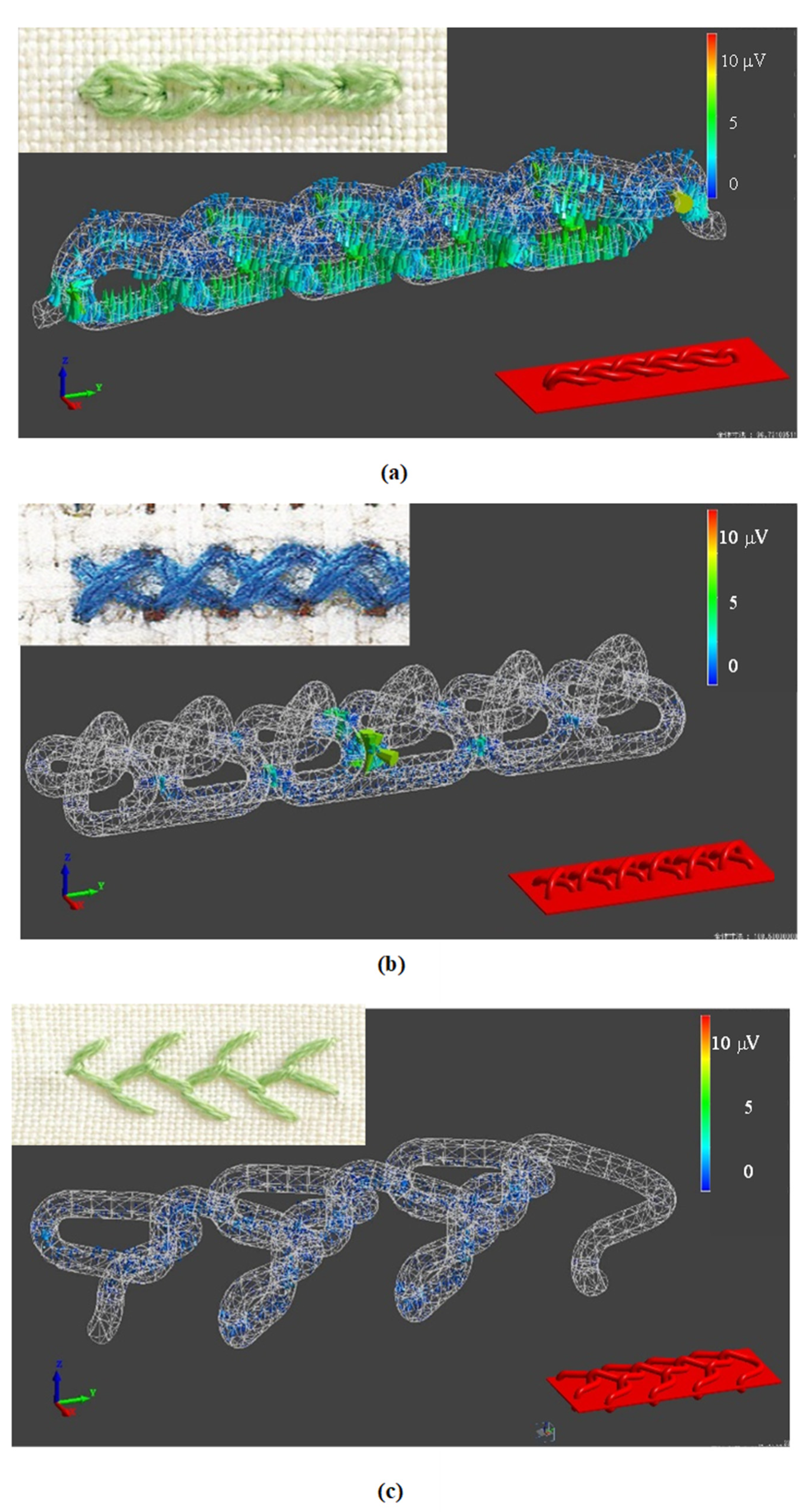
4.1. Dog Wear for Toy Poodles Embroidered with Piezoelectric PLLA Braided Cords
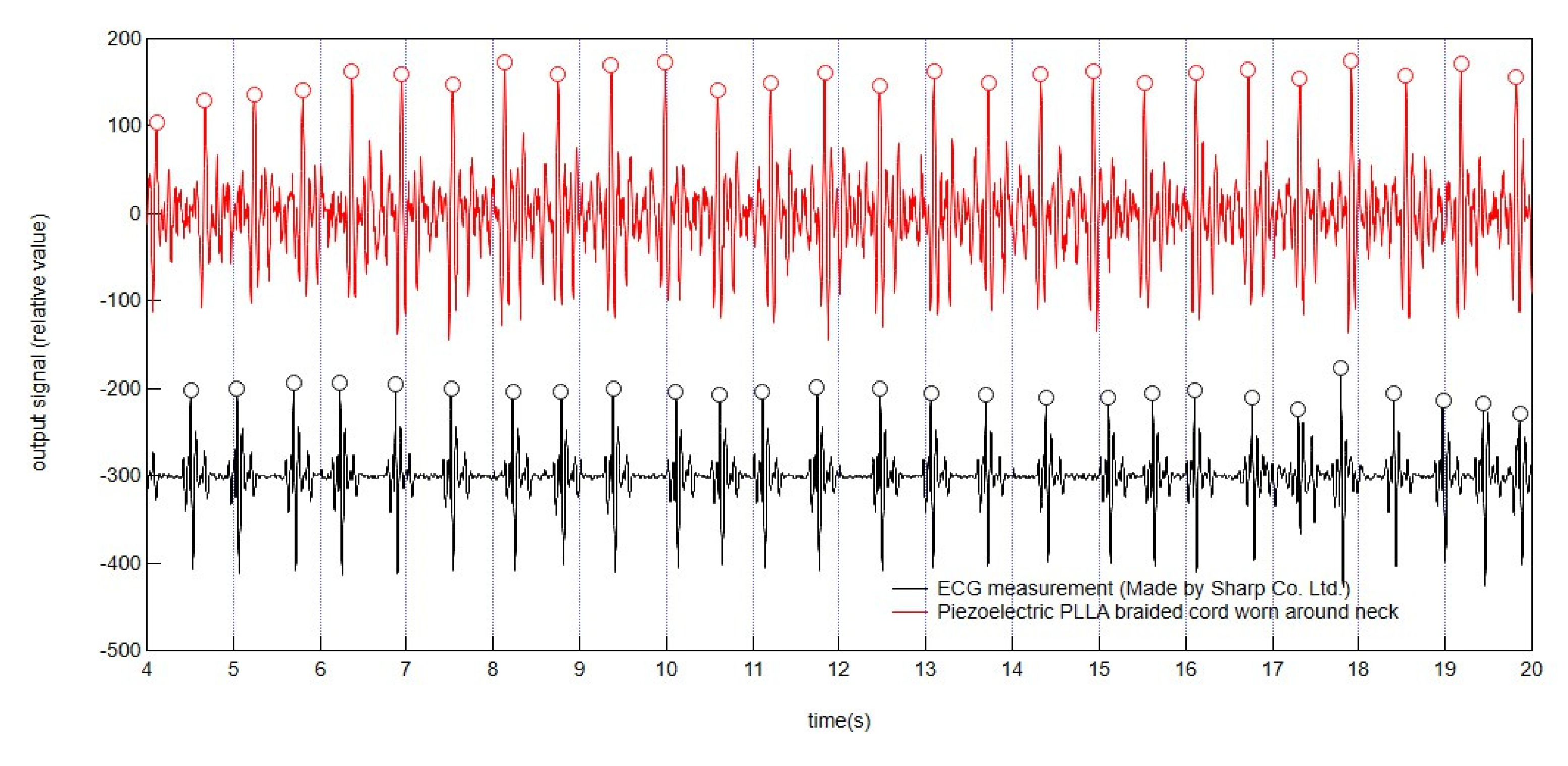
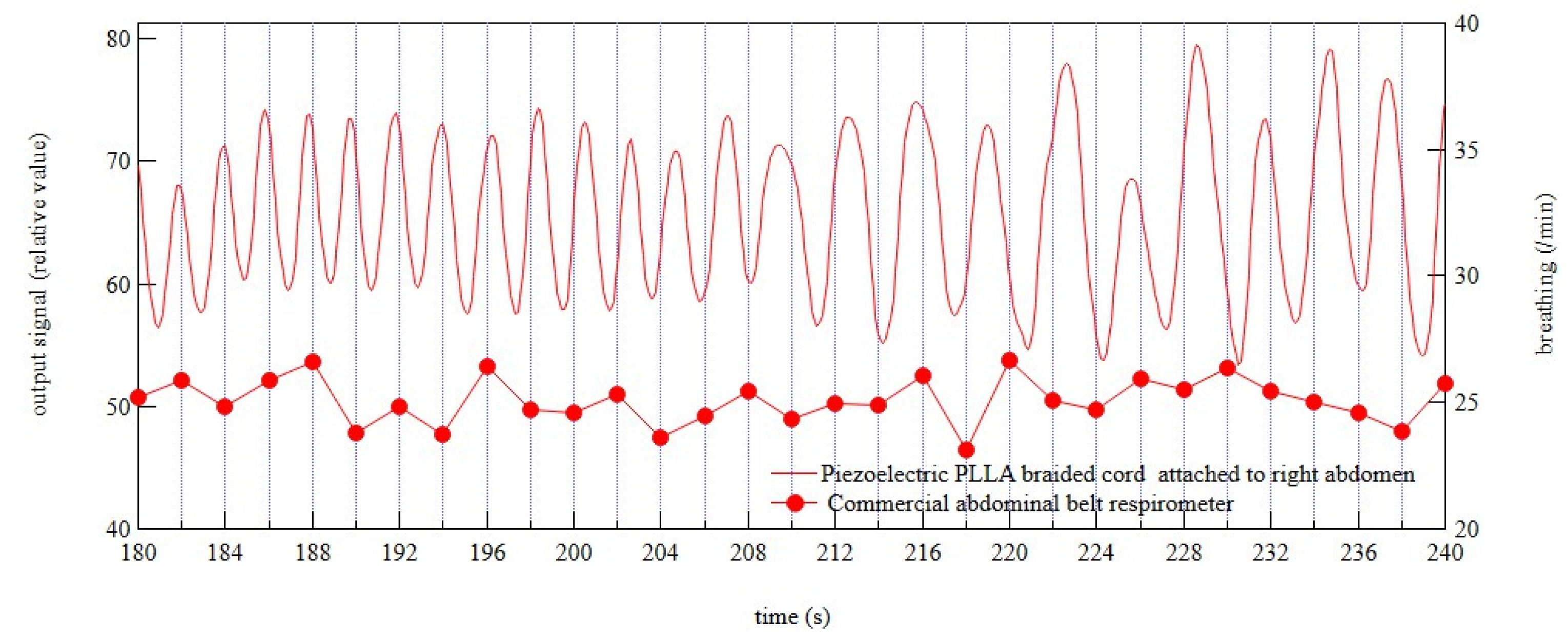
4.2. Sensing Functionality of Dog Wear Embroidered with Piezoelectric PLLA Braided Cords
5. Prototype Demonstration of an Indoor Dog Monitoring System Using Piezoelectric PLLA Braided Cords Embroidered on Dog Wear as Sensors
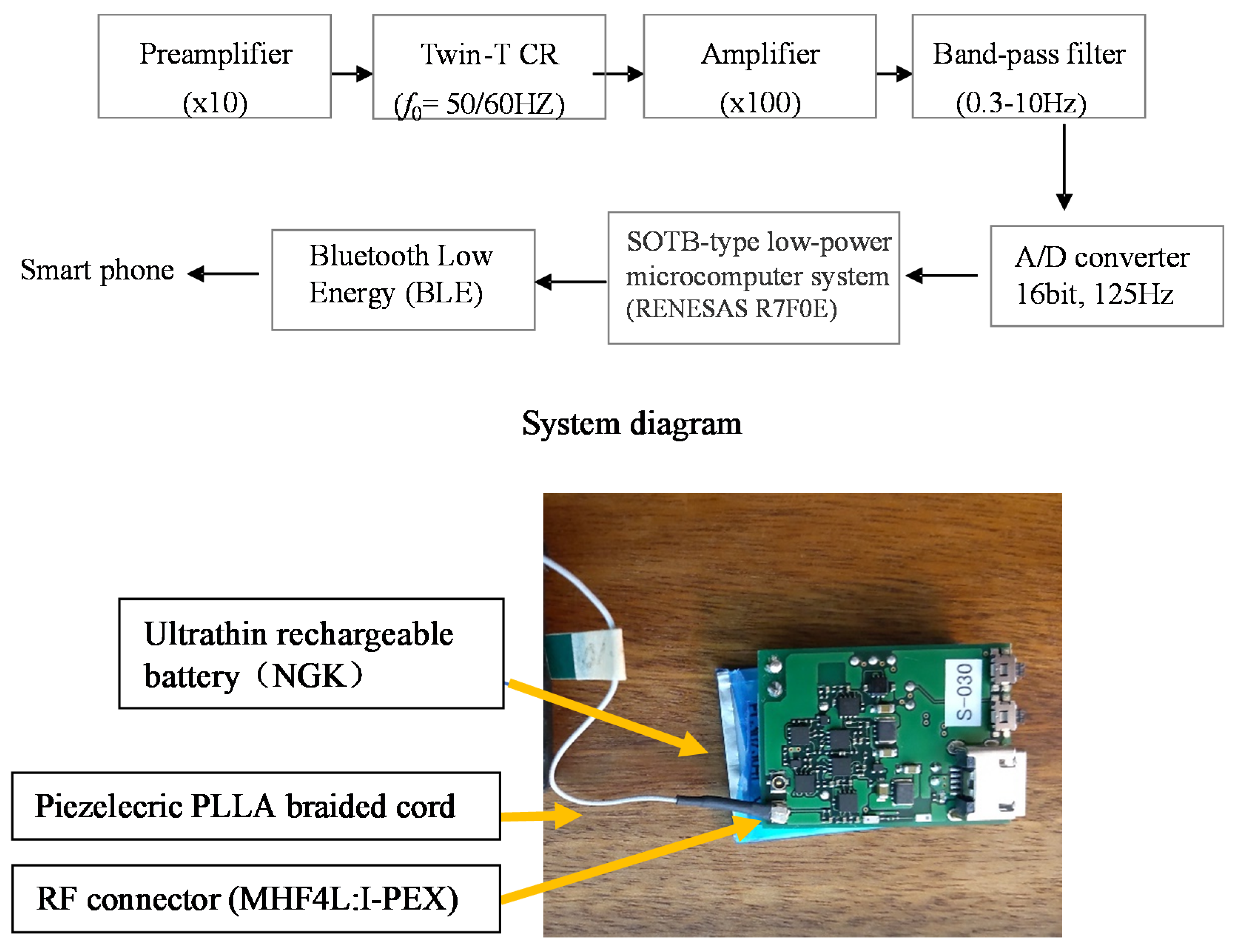
5.1. Data Acquisition and Transmission Systems
5.2. Concept of Activity Level Determination
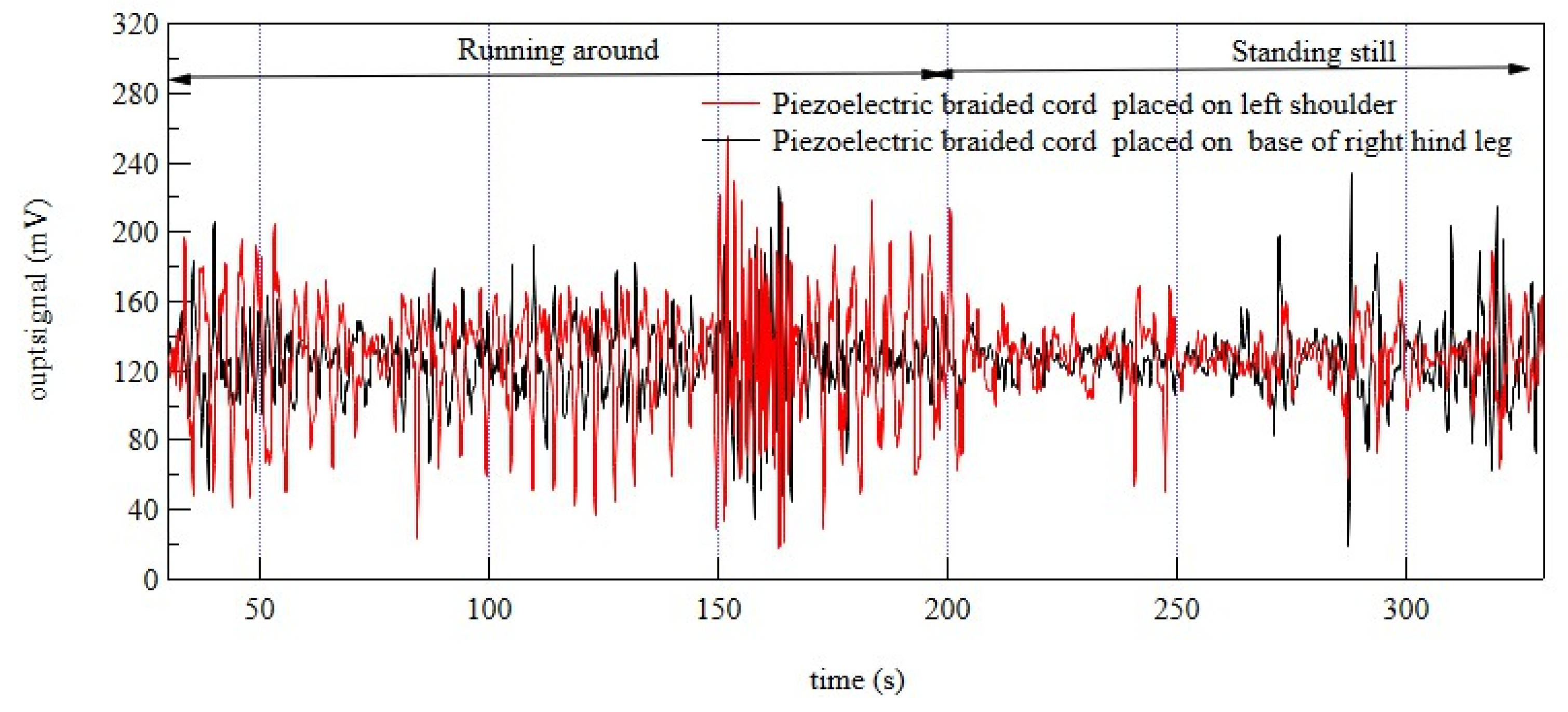
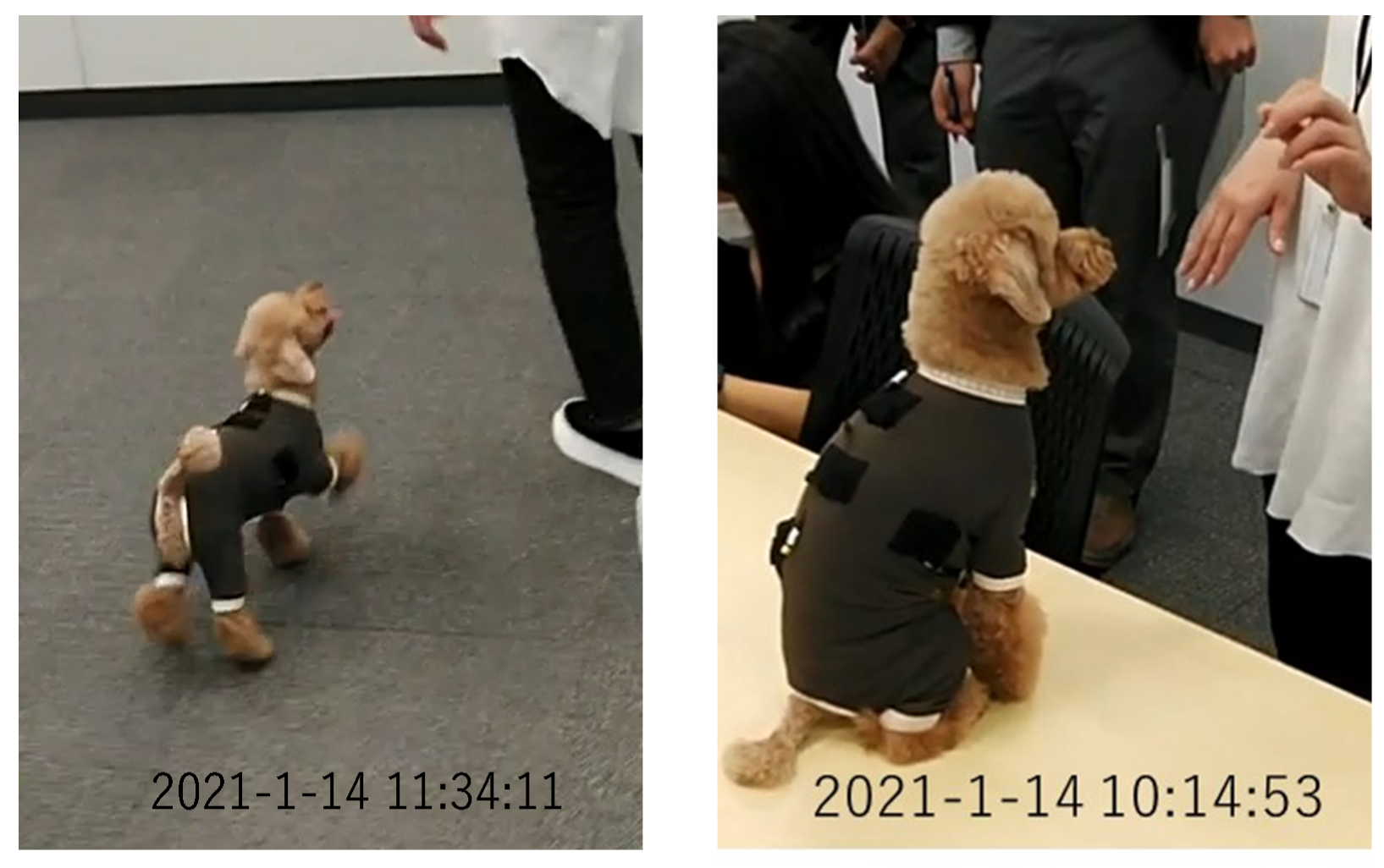
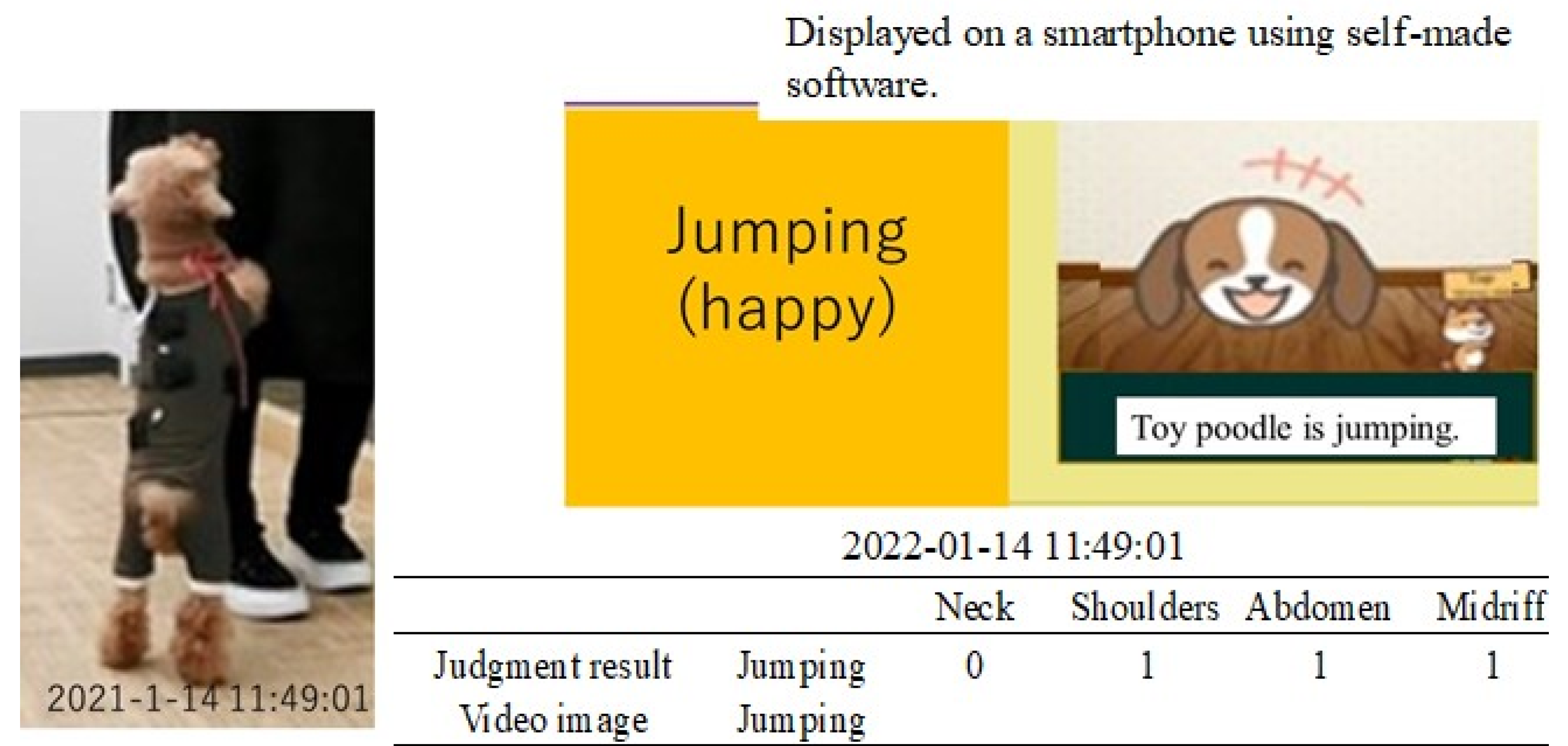
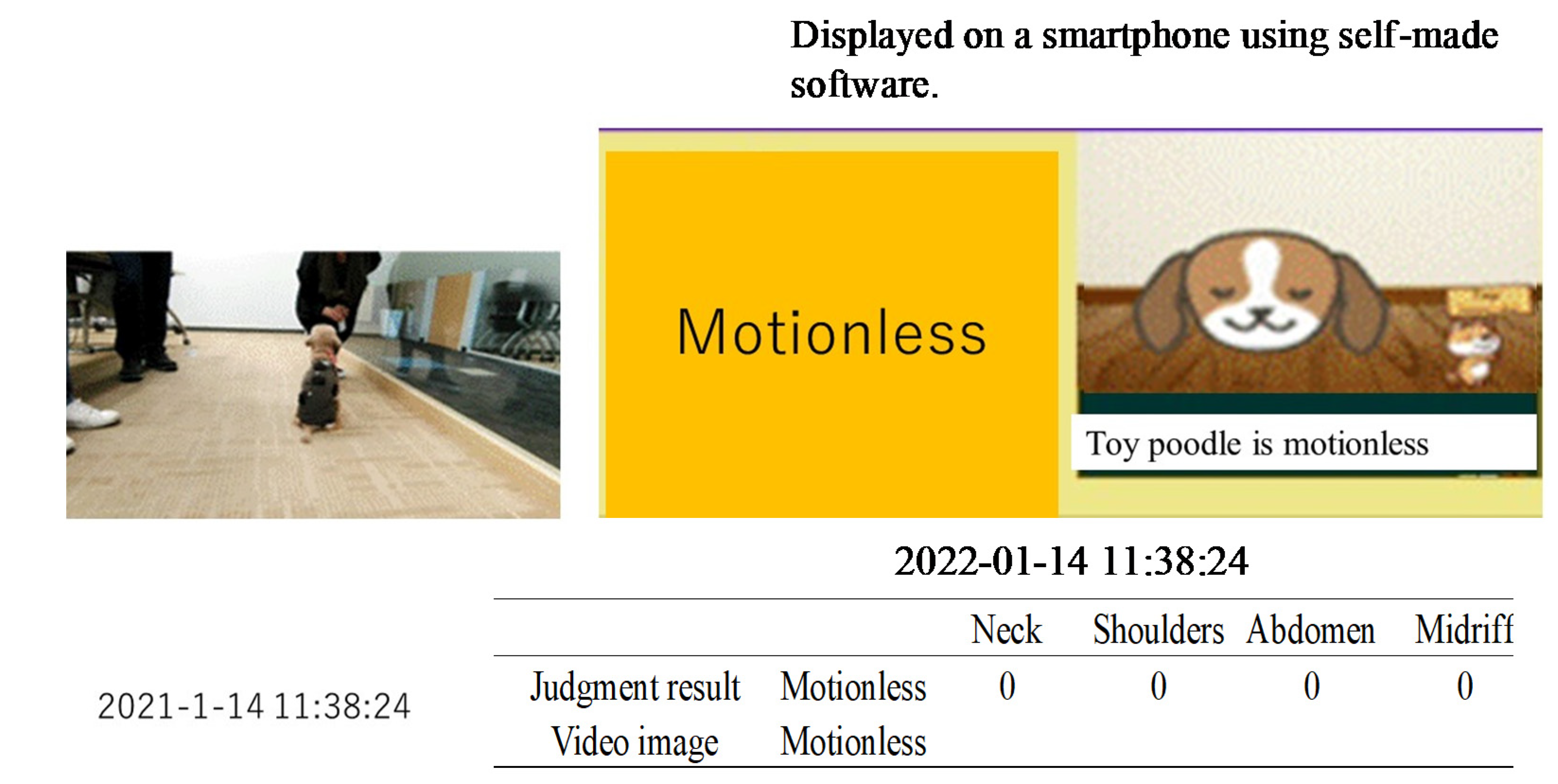
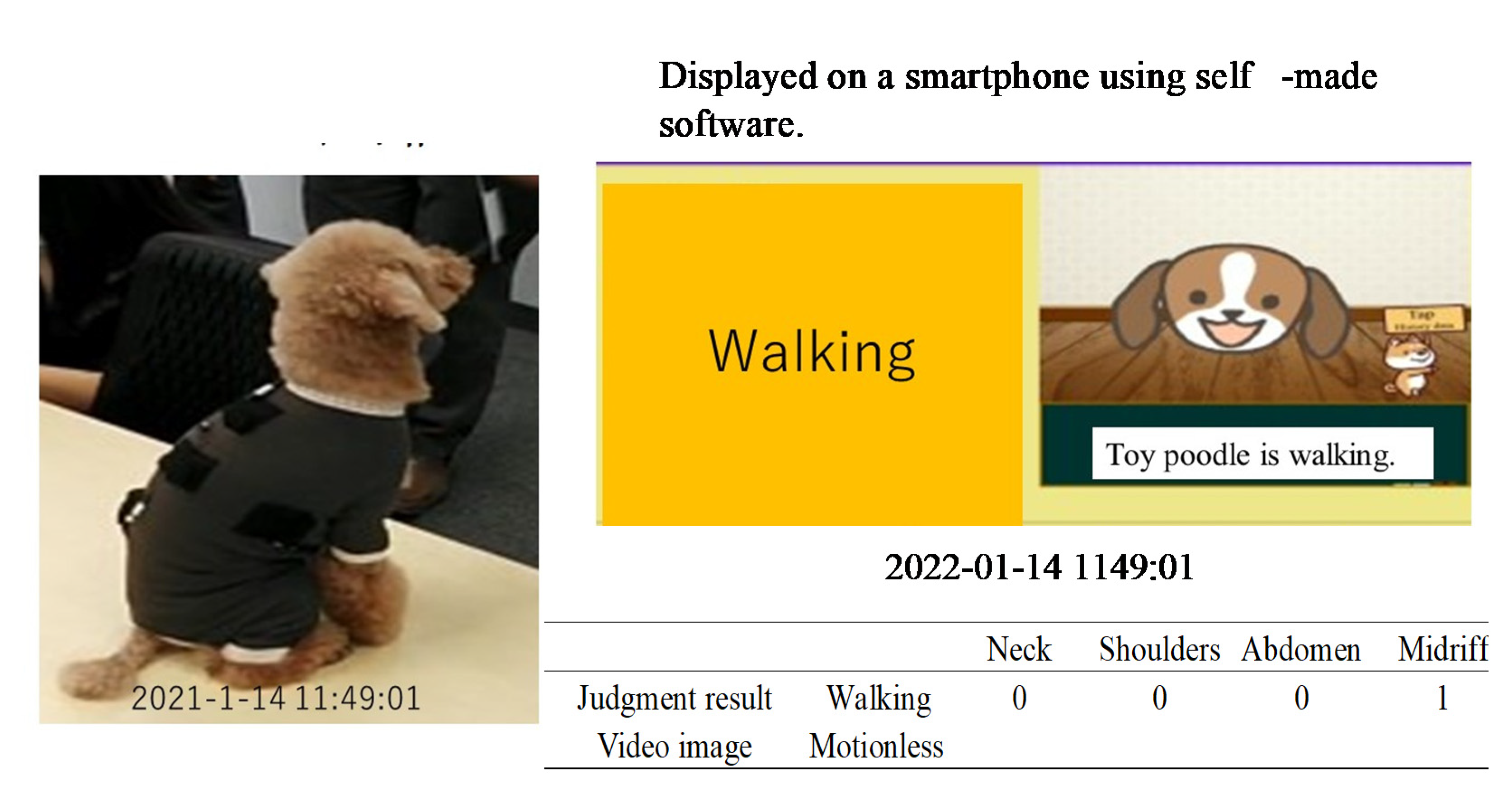
5.3. Verification Experimen
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Japan Pet Food Association. National Dog and Cat Breeding Survey in Japan; Japan Pet Food Association: Tokyo, Japan, 2021. (In Japanese) [Google Scholar]
- BBC. [n.d.]. BBC Households; Buy 3.2 Million Pets in Lockdown. Available online: https://www.bbc.co.uk/news/business-56362987 (accessed on 14 June 2020).
- BBC. [n.d.]. Guardian; Concerns over Pet Welfare Crisis Due to High Demand for ‘Pandemic Puppies. Available online: https://www.theguardian.com/lifeandstyle/2021/aug/26/concerns-over-pet-welfare-crisis-due-to-high-demandfor-pandemic-puppies (accessed on 9 September 2020).
- Dale, S. How to Mess with Separation Distress. In Proceedings of the Fetch dvm360 Conference, Kansas City, MO, USA, 26–28 August 2022. [Google Scholar]
- Holland, K.; Owczarczak, S.; Anderson, K.; Casey, R.; Christley, R.; Harris, L.; McMillan, L.; Mead, R.; Murray, J.; Samet, L. “More attention than usual”: A Thematic Analysis of Dog Ownership Experiences in the UK during the first COVID-19 Lockdown. Animals 2021, 11, 240. [Google Scholar] [CrossRef] [PubMed]
- Nichols, J. Proceedings of the ACM on Human-Computer Interaction; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar]
- Ettinger, S.; Feldman, C.; Cote, E. Textbook of Veterinary Internal Medicine, Expert Consult, 8th ed.; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Okuda, Y.; Takiguchi, M.; Tsujimoto, H. Textbook of Veterinary Medicine, 3rd ed.; Buneido: Tokyo, Japan, 2022. (In Japanese) [Google Scholar]
- Frediani, G.; Bocchi, L.; Vannetti, F.; Zonfrillo, G.; Carpi, F. Wearable Detection of Trunk Flexions: Capacitive Elastomeric Sensors Compared to Inertial Sensors. Sensors 2021, 21, 5453. [Google Scholar] [CrossRef] [PubMed]
- Ates, C.; Nguyen, P.; Gonzalez-Macia, L.; Morales, E.; Güder, F.; Collins, J.; Dincer, C. End-to-end Design of Wearable Sensors. Nat. Rev. Mater. 2022, 7, 887. [Google Scholar] [CrossRef] [PubMed]
- King, C. Application of Data Fusion Techniques and Technologies for Wearable Health Monitoring. Med. Eng. Phys. 2017, 42, 1. [Google Scholar] [CrossRef] [PubMed]
- Witt, R.; Kellogg, A.; Snyder, P.; Dunn, J. Windows into Human Health through Wearables Data Analytics. Curr. Opin. Biomed. Eng. 2019, 9, 28. [Google Scholar] [CrossRef]
- Iqbal, A.; Mahgoub, E.; Leavitt, A.; Asghar, W. Advances in Healthcare Wearable Devices. Flex. Electron. 2021, 5, 9. [Google Scholar] [CrossRef]
- Chakraborty, T.; Ghosh, I. Real-time Forecasts and Risk Assessment of Novel Coronavirus (COVID-19) Cases: A Data-driven Analysis. Chaos Solitons Fractals 2020, 135, 109850. [Google Scholar] [CrossRef]
- Benvenuto, D.; Giovanetti, M.; Vassallo, L.; Angeletti, S.; Ciccozzi, M. Application of the ARIMA model on the COVID-2019 Epidemic Dataset. Data Brief. 2020, 29, 105340. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, C.; Krause, J.; Peng, L. How to Read Articles that Use Machine Learning: Users’ Guides to the Medical Literature. J. Am. Med. Assoc. 2019, 322, 1806–1816. [Google Scholar] [CrossRef]
- Cui, F.; Yue, Y.; Zhang, Y.; Zhang, Z.; Zhou, S. Advancing Biosensors with Machine Learning. ACS Sens. 2020, 5, 3346. [Google Scholar] [CrossRef]
- Briscoe, J.; Dunn, S. Piezoelectric Nanogenerators a Review of Nanostructured Piezoelectric Energy Harvesters. Nano Energy 2015, 14, 15. [Google Scholar] [CrossRef]
- Wang, J.; Rychkov, D.; Nguyen, Q.D.; Gerhard, R. The Influence of Orthophosphoric-acid Surface Modification on Charge-storage Enhancement in Polypropylene Electrets. J. Appl. Phys. 2020, 128, 034102. [Google Scholar] [CrossRef]
- Fath, A.; Xia, T.; Li, W. Advances in the Application of Piezoelectric Materials in Microrobotic Systems. Micromachine 2022, 13, 1422. [Google Scholar] [CrossRef]
- Ohiki, Y. Development of a Braided Piezoelectric Cord for Wearable Sensors, Electr. Insul. Mag. 2020, 36, 59. [Google Scholar] [CrossRef]
- Tajitsu, Y.; Kawase, Y.; Katsuya, K.; Tamura, M.; Sakamoto, K.; Kawahara, K.; Harada, Y.; Kondo, T.; Imada, Y. New Wearable Sensor in the Shape of a Braided Cord (Kumihimo). IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 772–777. [Google Scholar] [CrossRef]
- Yin, L. A Self-sustainable Wearable Multi-modular E-textile Bioenergy Microgrid System. Nat. Commun. 2021, 12, 1542. [Google Scholar] [CrossRef]
- Galetti, P.; DeRossi, D.; De Reggi, A. Medical Applications of Piezoelectric Polymers; Wiley: New York, NY, USA, 1988. [Google Scholar]
- Nalwa, H. Ferroelectric Polymers; Marcel Dekker: New York, NY, USA, 1995. [Google Scholar]
- Fukada, E. History and Recent Progress in Piezoelectric Polymers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2000, 47, 1277–1290. [Google Scholar] [CrossRef]
- Tajitsu, Y. Piezoelectricity of Chiral Polymeric Fiber and Its Application in Biomedical Engineering. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2008, 55, 1000–1008. [Google Scholar] [CrossRef]
- Carpi, F.; Smela, E. Biomedical Applications of Electroactive Polymer Actuators; Wiley: Chichester, UK, 2009. [Google Scholar]
- Okuzaki, H.; Asaka, K. Soft Actuators; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Tajitsu, Y. Development of E-textile Sewn Together with Embroidered Fabric Having Motion-Sensing Function Using Piezoelectric Braided Cord for Embroidery. IEEE Trans. Dielectr. Electr. Insul. 2020, 27, 1644–1649. [Google Scholar] [CrossRef]
- Yoshida, M.; Onogi, T.; Onishi, K.; Inagaki, T.; Tajitsu, Y. High Piezoelectric Performance of Poly(lactic acid) Film manufactured by Solid-state Extrusion. Jpn. J. Appl. Phys. 2014, 53, 09PC02. [Google Scholar] [CrossRef]
- Hayashi, S.; Kamimura, Y.; Tsukamoto, N.; Imoto, K.; Sugitani, H.; Kondo, T.; Imada, Y.; Nakiri, T.; Tajitsu, Y. Piezoelectric Characteristics of Three-dimensional Solid Object of Poly(L-lactide) Fabricated by Three-dimensional Printing. Jpn. J. Appl. Phys. 2015, 54, 10NF01. [Google Scholar] [CrossRef]
- Tanimoto, K.; Saihara, S.; Adachi, Y.; Harada, Y.; Shiomi, Y.; Tajitsu, Y. Shear Piezoelectricity of Optically Active Polysuccinimides. Jpn. J. Appl. Phys. 2015, 54, 10NF02. [Google Scholar] [CrossRef]
- Lang, S.B. Guide to the Literature of Piezoelectricity and Pyroelectricity. Ferroelectrics 2005, 321, 91–204. [Google Scholar] [CrossRef]
- Nye, J. Physical Properties of Crystals; Clarendon Press: Oxford, UK, 1985. [Google Scholar]
- Tajitsu, Y.; Suehiro, A.; Tsunemine, K.; Katsuya, K.; Kawaguchi, Y.; Kuriwaki, Y.; Sugino, Y.; Nishida, H.; Kitamura, M.; Omori, K. Application of Piezoelectric Braided Cord to Dysphagia-detecting System. Jpn. J. Appl. Phys. 2018, 57, 11UG02. [Google Scholar] [CrossRef]
- Mitsuzuka, M.; Kinbara, Y.; Fukuhara, M.; Nakahara, M.; Nakano, T.; Takarada, J.; Wang, K.; Mori, Y.; Kageoka, T.; Tawa, T.; et al. Relationship between Photoelasticity of Polyurethane and Dielectric Anisotropy of Diisocyanate, and Application of High-Photoelasticity Polyurethane to Tactile Sensor for Robot Hands. Polymers 2021, 13, 143. [Google Scholar] [CrossRef]
- Brown, C. Beaded Embroidery Stitching; C&T Publishing: Boston, MA, USA, 2019. [Google Scholar]
- Maison, L. Haute Couture Embroidery; Thames & Hudson: London, UK, 2020. [Google Scholar]
- Tajitsu, Y.; Takarada, J.; Takatani, K.; Nakanishi, R.; Yanagimoto, H.; Shiomi, S.; Nakagawa, I.; Kawahara, I.; Nakiri, T.; Shimda, S.; et al. Prototype Sensor System Using Fabricated Piezoelectric Braided Cord for Work-Environment Measurement during Work from Home. Micromachines 2021, 12, 966. [Google Scholar] [CrossRef]
- Nonoue, S.; Mashita, M.; Haraki, S.; Mikami, A.; Adachi, H.; Yatani, H.; Yoshida, A.; Taniike, M.; Kato, T. Inter-scorer Reliability of Sleep Assessment Using EEG and EOG Recording System in Comparison to Polysomnography. Sleep Biol. Rhythm. 2017, 15, 39–48. [Google Scholar] [CrossRef]
- Furihata, R.; Saitoha, K.; Suzuki, M.; Jike, M.; Kaneita, Y.; Ohida, T.; Buysse, D.; Uchiyama, M. A Composite Measure of Sleep Health Is Associated with Symptoms of Depression among Japanese Female Hospital Nurses. Compr. Psychiatry 2012, 97, 152151. [Google Scholar] [CrossRef]
- Robertson, D.; Phillip, L.; Polinsky, R. Primer on the Autonomic Nervous System; Academic Press: London, UK, 2015. [Google Scholar]
- Zambotti, M.; Trinder, J.; Silvani, A.; Colrain, I.; Baker, F. Dynamic Coupling between the Central and Autonomic Nervous Systems during Sleep. A review. Neurosci. Biobehav. Rev. 2018, 90, 84–103. [Google Scholar] [CrossRef]
- Cox, E.; Mancini, C.; Ruge, L. Understanding Dogs’ Engagement with Interactive Games: Interaction Style, Behaviour and Personality. In Proceedings of the Seventh International Conference on Animal-Computer Interaction, Milton Keynes, UK, 10–12 November 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 12–24. [Google Scholar] [CrossRef]
- Robinson, C.; Torjussen, A. Canine Co-Design: Investigating Buttons as an Input Modality for Dogs. In Proceedings of the DIS ’20:2020 ACM Designing Interactive Systems Conference, Eindhoven, The Netherlands, 6–10 July 2020. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Molecular weight (×103) | 200 | 200 | 200 | 240 | 240 | 240 |
| Spinning speed (m/min) | 800 | 800 | 800 | 1600 | 1600 | 1600 |
| Drawing ratio and temperature | ×10 (97 °C) | ×6 (100 °C) | ×4 (100 °C) | ×3.5 (95 °C) | ×2.5 (95 °C) | ×2 (95 °C) |
| Melting point (°C) | 184.3 | 183.8 | 184.2 | 184.2 | 184.7 | 181.7 |
| Degree of crystallinity (%) | 58.1 | 51.5 | 51.5 | 52.5 | 53.5 | 50.6 |
| Coefficient of orientation | 0.986 | 0.912 | 0.788 | 0.867 | 0.706 | 0.701 |
| Stretching (%) | 8–10 | 15–20 | 25–30 | 20–30 | 25–30 | 28–32 |
| Tensile strength (GPa) | 0.20 | 0.30 | 0.35 | 0.55 | 0.54 | 0.51 |
| Piezoelectric constant (pC/N) | 20.1 | 17.5 | 6.0 | 8.2 | 4.8 | 5.0 |
| Threshold Judgment | State of Activity | |||
|---|---|---|---|---|
| Neck | Shoulders | Abdomen | Midriff | |
| 0 | 0 | 0 | 0 | motionless |
| 0 | 0 | 0 | 1 | walking |
| 0 | 0 | 1 | 0 | walking |
| 0 | 0 | 1 | 1 | walking |
| 0 | 1 | 0 | 0 | walking |
| 0 | 1 | 0 | 1 | walking |
| 0 | 1 | 1 | 0 | walking |
| 0 | 1 | 1 | 1 | jumping (happy) |
| 1 | 0 | 0 | 0 | standing |
| 1 | 0 | 0 | 1 | standing |
| 1 | 0 | 1 | 0 | walking |
| 1 | 0 | 1 | 1 | jumping (happy) |
| 1 | 1 | 0 | 0 | walking |
| 1 | 1 | 0 | 1 | walking |
| 1 | 1 | 1 | 0 | walking |
| 1 | 1 | 1 | 1 | jumping (happy) |
| Resting (Motionless) | Standing Still | Walking (Moving) | Jumping (to Please the Owner) | |
|---|---|---|---|---|
| Rate of agreement | 85% | 75% | 90% | 95% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tajitsu, Y.; Takarada, J.; Hikichi, T.; Sugii, R.; Takatani, K.; Yanagimoto, H.; Nakanishi, R.; Shiomi, S.; Kitamoto, D.; Nakiri, T.; et al. Application of Piezoelectric PLLA Braided Cord as Wearable Sensor to Realize Monitoring System for Indoor Dogs with Less Physical or Mental Stress. Micromachines 2023, 14, 143. https://doi.org/10.3390/mi14010143
Tajitsu Y, Takarada J, Hikichi T, Sugii R, Takatani K, Yanagimoto H, Nakanishi R, Shiomi S, Kitamoto D, Nakiri T, et al. Application of Piezoelectric PLLA Braided Cord as Wearable Sensor to Realize Monitoring System for Indoor Dogs with Less Physical or Mental Stress. Micromachines. 2023; 14(1):143. https://doi.org/10.3390/mi14010143
Chicago/Turabian StyleTajitsu, Yoshiro, Jun Takarada, Tokiya Hikichi, Ryoji Sugii, Kohei Takatani, Hiroki Yanagimoto, Riku Nakanishi, Seita Shiomi, Daiki Kitamoto, Takuo Nakiri, and et al. 2023. "Application of Piezoelectric PLLA Braided Cord as Wearable Sensor to Realize Monitoring System for Indoor Dogs with Less Physical or Mental Stress" Micromachines 14, no. 1: 143. https://doi.org/10.3390/mi14010143