Minimal Impact One-Dimensional Arrays


1
University of Hasselt, 3500 Hasselt, Belgium
2
Faculty of Social Sciences, University of Antwerp, 2020 Antwerpen, Belgium
3
Department MSI, KU Leuven and Centre for R&D Monitoring (ECOOM), 3000 Leuven, Belgium
*
Author to whom correspondence should be addressed.
Mathematics 2020, 8(5), 811; https://doi.org/10.3390/math8050811
Submission received: 15 April 2020
/
Revised: 12 May 2020
/
Accepted: 13 May 2020
/
Published: 17 May 2020
(This article belongs to the Special Issue Quantitative Studies of Science)
{kind=link}
Abstract
:In this contribution, we consider the problem of finding the minimal Euclidean distance between a given converging decreasing one-dimensional array X in (R+)∞ and arrays of the form , with a being a natural number. We find a complete, if not always unique, solution. Our contribution illustrates how a formalism derived in the context of research evaluation and informetrics can be used to solve a purely mathematical problem.
1. Introduction
Let (R+)∞ be the positive cone of all infinite sequences with non-negative real values. Elements in this cone will be referred to as one-dimensional arrays, in short, arrays. We recall that any finite sequence with non-negative values can be considered as an element in (R+)∞ by adding infinitely many zeros. Let X = and Y = be elements of (R+)∞, then X ≤ Y if for all r = 1, 2, …, xr ≤ yr. Equality only occurs if for all r, xr = yr. In this way, (R+)∞ becomes a cone with a (natural) partial order ≤. An array X = in (R+)∞ is said to be decreasing if for all r = 1, 2, …, xr ≥ xr+1.
We recall the definition of the h-index as introduced by Hirsch [1]. Consider, , the list of received citations of the articles (co-) authored by scientist S, ranked according to the number of citations each of these articles has received. Articles with the same number of citations are given different rankings. Then, the h-index of scientist S is h if the first h articles each received at least h citations, while the article ranked h + 1 received strictly less than h + 1 citations. Stated otherwise, scientist S’ h-index is h if h is the largest natural number such that the first h publications each received at least h citations.
This index, although having many disadvantages in practical use ([2,3]), has received a lot of attention. At this moment [1], it has received already more than 4300 citations in the Web of Science. Because of these disadvantages, many alternatives have been proposed, among which the most popular is the g-index, introduced and studied by Egghe [4]. This g-index is defined as follows: as with the calculation of the h-index, articles are ranked in decreasing order of the number of citations received; then, the g-index of this set of articles is defined as the highest rank, g, such that the first g articles together received at least citations. This can be reformulated as follows: the g-index of a set of articles is the highest-rank g such that the first g (>0) articles have an average number of citations equal to or higher than g. Indeed, . For more information on the h-index and related indices, we refer to [5,6,7].
In [8], we defined the h- and the g-index for infinite sequences as follows:
Definition 1.
The h-index for infinite sequences:
Let X =be a decreasing array in (R+)∞. The h-index of X, denoted h(X), is the largest natural number h such that the first h coordinates each have at least a value h. If all components of a decreasing array X are strictly smaller than 1, then h(X) = 0. We will further consider only arrays X with at least one component larger than or equal to 1, hence with h(X) ≥ 1.
Note that an h-index is defined here only for decreasing arrays (although a generalization exists, see [9]). The same remark is valid for the other indices used in this article.
Similarly, a g-index has been defined in [8] as follows:
Definition 2.
The g-index for infinite sequences:
Let X =be a decreasing array in (R+)∞. The g-index of X, denoted gX, is defined as the highest natural number g such that the sum of the first g coordinates is at least equal to g2 or, equivalently, if the average of the first g coordinates is at least equal to g.
Notation. We denote by [[a,b]] for a, b natural numbers such that a ≤ b, the intersection of the real-valued interval [a,b] and N, the set of natural numbers.
2. Introducing the Research Problem
Definition 3.
For each natural number a > 0, we define the minimal impact array of level a, denoted as Aa, as follows:
It is easy to see that Aa is the smallest array X (for the partial order ≤) for which h(X) = g(X) = a. We note that the sequence (An)n is increasing for ≤.
We say that an array X is l2-converging if is finite. As we only use this form of convergence, we will further on omit the specification “l2” and simply say converging.
Next, we formulate the research problem of this contribution.
Research Problem
Given a converging decreasing array X in (R+)∞, find the largest natural number a such that the Euclidean distance d(X,Aa) is minimal.
We note that the analogous problem for differentiable functions Z(r) and a real number a has already been studied and solved in [10]. We further note that the requirements to be decreasing and convergent are independent. Indeed, if a decreasing array is convergent and we add its sum (or a larger number) to any term, except the first, then the resulting array is still convergent but not decreasing anymore. Further, the array with terms is decreasing but not convergent.
Minimizing d(X,Aa) is the same as finding a minimal value for the function
where denotes the set of natural number without zero and
Equation (1) shows why we need convergent arrays. Note also that a minimal value a depends on X. Hence, we write it as aX. It is trivial to see that if X = Ab for some natural value b, then b = aX (for this X) and f(b) = 0. It is clear that arrays X of the form Ab are the only ones for which the corresponding function fX becomes zero.
This leads us to the following questions:
- Does aX exist for each X, converging and decreasing in (R+)∞?
- Given X, converging and decreasing in (R+)∞, how do we find aX (if it exists)?
- If aX exists, is it unique?
3. Results
3.1. Characterizing the Minimum of fX
Taking into account that aX is possibly not unique for some X, we want to characterize aX—if it exists and is strictly larger than 1—as the largest natural number such that
fX(aX − 1) ≥ fX(aX)
Note that if the minimum of fX occurs in two (or more) natural numbers, we choose the largest one. We still have to show that inequality (2) actually characterizes the minimum we are searching for. Indeed, theoretically, it may happen that the function fX(a) decreases first to a (local) minimum b, then increases again, and then decreases to a lower minimum value than the one in b. This might, in theory, even occur infinitely many times. We will prove that this behavior does not occur. Moreover, if we want to use inequality (2), we first have to deal with the case aX = 1, as this case is not covered by inequality (2).
Remark 1.
We first note that if hX ≥ 2, then certainly aX > 1. Indeed, if hX ≥ 2, then x1≥ x2 ≥ 2. Then, fX(1) =< fX(2) =is equivalent to 1 < 8−2x1 − 4x2 or 2x1 + 4x2 < 7. This inequality never holds; hence, the minimum of fX does not occur in 1. We conclude that aX = 1 can only occur if hX = 1.
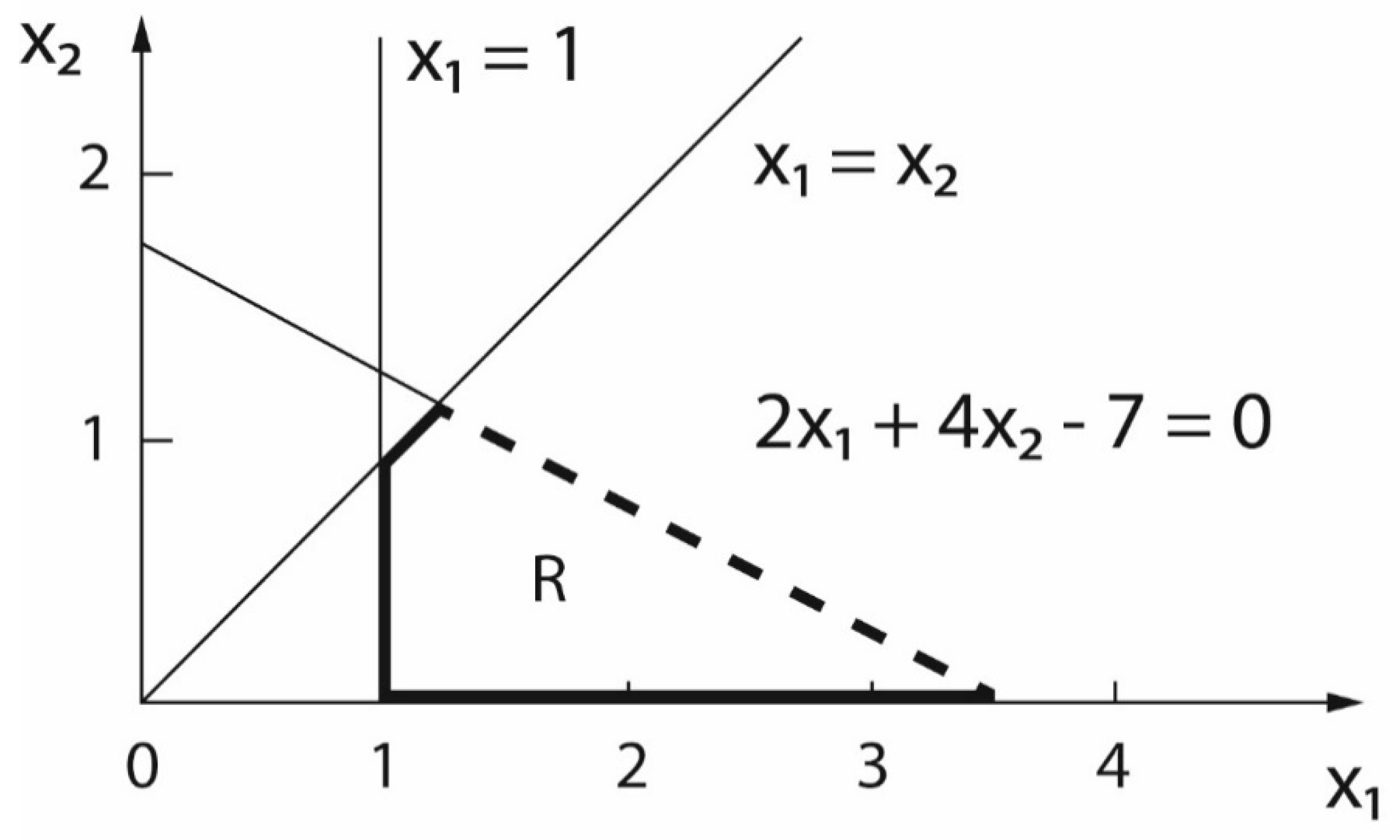
If aX = 1, then fX(1) < fX(2). This inequality is equivalent to −2x1 + 1 < −4(x1 + x2) + 8 or 2x1 + 4x2 < 7 or 2x1 + 4x2 − 7 < 0.
Taken the constraints x1 ≥ 1 and x1 ≥ x2 into account yields the following area (see Figure 1) in which aX = 1. This is the area R situated within the polygon with vertices (1,0), (1,1), (7/6,7/6), (7/2,0), where points on the line 2x1 + 4x2 − 7 = 0 are excluded. We note that for all points in this area, hX = 1.
When it comes to arrays X for which aX = 1, this set consists of all decreasing convergent arrays with (x1,x2) in the area R.
3.2. The Generalized Discrete h- and g-Index
We next show that aX exists for each converging and decreasing X in (R+)∞. For this, we recall the definitions of the generalized discrete h- and g-index [11].
Definition 4.
The generalized discrete h- and g-index [11]:
Given X, a decreasing array in (R+)∞. Let θ > 0, then
- (1)
- z = hθ(X), in short hθ, iff z is the largest index such that xz ≥ θz; if such an index does not exist, namely when x1 < θ, then we define z = hθ(X) = 0;
- (2)
- z = gθ(X), in short gθ, iff z is the largest index such that≥ θz2; if such an index does not exist, e.g., when, then we define z = gθ(X) = 0.
We note that if a and b are natural numbers and X = is a decreasing array in (R+)∞, then the property for r ≤ a: implies that gθ(X) ≥ a; similarly, the property for r > b: implies gθ(X) ≤ b.
We finally also define the discrete f-index, already introduced in [10], for the continuous case.
- (3)
- z = fθ(X), in short fθ, if z is the largest index such that. Again, if such an index does not exist, we define z = fθ(X) = 0.
In [10], we found that in the continuous case, the solution of our problem was obtained as f(3/4)(X) (where f is the continuous analog of the discrete f-index introduced above). We will show further on that this is not the case for the discrete case studied here.
Proposition 1.
The indicators hθ(X), gθ(X), and fθ(X) are each decreasing in θ.
Proof of Proposition 1.
Let θ1 > θ2. If (X) and (X), then . As is the largest index such that , it follows that (X) ≤ (X). Consequently, θ1 > θ2 implies (X) ≤ (X), showing that hθ(X) is decreasing in θ.
Similarly, if θ1 > θ2, (X), and (X), then . As is the largest index such that , it follows, like in the case for the generalized discrete h-index, that gθ(X) is decreasing in θ. Finally, it also follows that fθ(X) is decreasing in θ. □
Theorem 1.
For all X, decreasing in (R+)∞ and all θ > 0, hθ(X) ≤ fθ(X) ≤ gθ(X). Hence, fθ(X)[[hθ(X), gθ(X)]].
Proof of Theorem 1.
Let a = fθ(X), then, by the definition of fθ(X),
Hence, and thus a+1 > hθ(X), leading to a = fθ(X) ≥ hθ(X). Now, for a = fθ(X), we further have , hence a ≤ gθ(X). This proves Theorem 1. □
3.3. Excluding the Theoretical Case of Infinitely Many Minima
Next, we need two lemmas.
Lemma 1.
If X is decreasing, thenwithis also decreasing. This decrease is strict if x1 > x2.
Proof of Lemma 1.
The easy proof is left to the reader. □
As for given X and n > 0, xn = θn, for , it is clear that (where n = 0 is reached for θ > x1). Now, we prove a similar result for gθ(X).
Lemma 2.
For given X, decreasing and convergent,
Proof of Lemma 2.
It is clear that N (recall that gθ(X) = 0 if ). Next, we consider the opposite relation.
The value n = 0 results from all θ > . If n ≠ 0, we define . Then, we have, using Lemma 1, for all i ≤ n, = θn. Consequently,
Now, for all i > n, using Lemma 1 again, and hence
It follows from (3) and (4) and the definition of gθ that n = gθ. This shows that □
Theorem 2.
Given X is decreasing and convergent and a > g(0.5)(X), then fX(x) is strictly increasing for x > a.
Proof of Theorem 2.
From Lemma 2, it follows that there exists θ0 < 0.5 such that . Indeed, gθ(X) is a decreasing function of θ and a > g(0.5)(X). Hence
and . From this inequality, we derive that and . Consequently, which shows that fX(x) is strictly increasing for x > g(0.5)(X). □
It follows from Theorem 2 that if aX exists, it belongs to [[1, g(0.5)(X)]], which excludes the theoretical case of infinitely many minima.
3.4. Excluding the Case of More Than One Minimum
Next, to exclude the case of a local maximum, following a first local minimum, we continue as follows.
Theorem 3.
For all X, decreasing and convergent in (R+)∞ and for all awe have the following property:
fX(a + 1) > fX(a) implies that fX(a + 2) > fX(a + 1).
Proof of Theorem 3.
From (5), we also note that (2(a+1)+2a)xa+1 = (4a+2) xa+1 < , or xa+1 < a+1.
Now, we have to show that
We rewrite the left-hand side of this inequality as
Because of (5), we know that this expression is smaller than
As X is decreasing and hence 2axa+1 ≥ 2axa+2, the expression (6) is smaller than or equal to
Finally, because the note after inequality (5), expression (7) is smaller than
Finally, we see that
which proves this theorem. □
Theorem 3 shows that a minimum for fX(x) exists and that aX is uniquely defined. We note, however, that the minimum of fX is not always unique. Indeed, the following example gives a case where there are two minima.
Let X = (5, 4.5). Then, fX(1) = 45.25 − 10 + 1 = 36.25; fX(2) = 45.25 − 38 + 8 = 15.25; fX(3) = 45.25 − 57 + 27 = 15.25; fX(4) = 45.25 − 76 + 64 = 33.25. Hence, aX = 3.
From the previous proof, we know that fX(a+1) > fX(a) implies xa+1 < a + 1. Hence, a + 1 > h(X). Hence, fX(a) is decreasing on [[1, …, h(X)]]. The next proposition shows that this is actually a strict decrease.
Proposition 2.
If h(X) > 1, then fX(a) is strictly decreasing for a in [[1, …, h(X)]].
Note that the requirement h(X) > 1 implies that aX > 1.
Proof of Proposition 2.
For any natural number a, such that a+1 ≤ h(X), we have x1 ≥ …xa ≥ xa+1 ≥ a + 1. Consequently, for all j = 1, …, a + 1, xj − a − 1 ≥ 0.
Hence, (xj − a) > (xj − a − 1) ≥ 0 and thus (xj − a)2 > (xj − a − 1)2.
Now, fX(a+1) < = = fX(a). Indeed, (xa+1 − a)2 − (xa+1)2 = −2axa+1 + a2 = a(a – 2xa+1) < 0, as 2xa+1 ≥ xa+1 ≥ a + 1 > a. □
As h(X) ≤ g(X) ≤ g(0.5)(X), this result shows that .
We next reformulate inequality (2), leading to a refinement of the previous observation.
Theorem 4.
Given an array X, converging and decreasing in(R+)∞, then aX (≠1) is characterized as the largest natural number that satisfies the following inequality:
Proof of Theorem 4.
From Equations (1) and (2), we have
□
Theorem 5.
If f(3/4)(X) > 1, then, f(3/4)(X) ≤ aX and hence
.
Proof of Theorem 5.
If a = f(3/4)(X), then
As a = f(3/4)(X) ≤ g(3/4)(X), we have .
Consequently, by Theorem 4, we find that
(10) ≥.
As aX is the largest natural number with this property, this ends the proof of Theorem 5. □
3.5. Examples
Example 1.
We provide an example such that the following strict inequalities hold: h(3/4)(X) < f(3/4)(X) < aX < g(0.5)(X).
Let X = (6,1,1). Then, h(3/4)(X) = 1 < f(3/4)(X) = 2 < aX = 3 < g(0.5)(X) = 4.
This example shows that, contrary to the continuous case, f(3/4)(X) is not always the solution of the minimization problem. Stated otherwise, in general, f(3/4)(X) ≠ aX. Yet, one may say that f(3/4)(X) is a (close) under limit.
As g(3/4)(X) ≥ f(3/4)(X), it was an upper limit for aX in the continuous case. One may wonder if, in the discrete case, g(3/4)(X) is either an under or an upper limit for aX. Yet, none of these two alternatives are correct. In the case of X = (6,1,1), g(3/4)(X) = 3 = aX. However, for X = (8,1), h(3/4)(X) = 1 < f(3/4)(X) = 2 = aX < g(3/4)(X) = 3 < g(0.5)(X) = 4, while for X = (2, 0.9), h(3/4)(X) = 1 = f(3/4)(X) = g(3/4)(X) < aX = g(0.5)(X) = 2.
We already observed that g(3/4)(X) can be smaller than, equal to, and larger than aX. We next show that aX ≤ g(3/4)(X) +1.
Proposition 3.
Given an array X, converging and decreasing in (R+)∞, then aX ≤ g(3/4)(X) +1.
Proof of Proposition 3.
We show that if a = g(3/4)(X) +1, then fX(a+1) > fX(a). This inequality is equivalent to
Now, a = g(3/4)(X) +1 > g(3/4)(X) ≥ h(3/4)(X) and hence xa+1 ≤ xa < (3/4)a.
Moreover, .
Consequently, , which proves Proposition 3. □
Example 2.
If X = (2,2,2), then aX = 3 and g(3/4)(X) = 2, providing an example where there is an equality for the expression aX ≤ g(3/4)(X) +1.
3.6. An Upper Bound for aX
We already know that g(3/4)(X) is not an upper bound for aX and that g(0.5)(X) is. Hence, we wonder if there a number strictly between 0.5 and 0.75 that leads to an upper bound for all X.
Theorem 6.
An upper bound for aX is provided by g(7/12)(X).
Proof of Theorem 6.
Take a ≥ gs(X), with s being any real number strictly smaller than 0.75.
Hence, a+1 > gs(X) ≥ hs(X). From these inequalities, we derive
Multiplying the first inequality by a and adding the two resulting inequalities yields
Now, from Proposition 3, we know that fX(a+1) > fX(a), hence a ≥ aX if
From this inequality, we find that s must satisfy the following inequality:
leading to
This inequality must hold for any natural number a different from zero. As the right-hand side is increasing in a, we consider the inequality for a = 1, leading to s ≤ 7/12. □
Corollary 1.
Given an array X, converging and decreasing in (R+)∞, then
.
We already observed that if aX = 1, then h(X) = 1. What about the converse? The next proposition answers this question.
Proposition 4.
If h(X) = 1, then ax can be larger than any natural number b.
Proof of Proposition 4.
Consider X = (z, 1, 0, …) and we want to find z such that aX ≥ b. If aX ≥ b, then fX(b) ≥ fX(b + 1), or (with b > 2): 2(z + 1) ≥ 3b2 + 3b + 1. Hence, it suffices to take z > (3b2 + 3b − 1)/2. □
An example: Suppose that we want aX ≥ 18. Taking z = 512 leads to X = (512, 1, 0, …) and aX = 18. If, however, we want aX ≥ 19, then z = 570, leading to X = (570, 1, 0, …) with aX = 20.
4. Applications
First, we give a new characterization of the classical h-index [1], i.e., the case θ = 1.
Proposition 5.
Given X decreasing and convergent, then h(X) = max{aN; Aa ≤ X}.
Proof of Proposition 5.
Writing h(X) simply as h, we see that Ah ≤ X because for Ah and j ≤ h, xj ≥ h, while for all j > h, xj ≥ 0. This shows that h ≤ max{a N; Aa ≤ X}.
Now, let am = max{a N; Aa ≤ X}. Then, we see that for all j ≤ am, xj ≥ am, while for all j > am, xj ≥ 0. As h is defined as the largest number with this property, we see that h ≥ am = max{a N; Aa ≤ X}. This proves this proposition. □
Before continuing with the next proposition, we recall the definition of the majorization partial order for finite sequences.
Definition 5.
The majorization order [12]:
Let X, Y
(R+)k, where k is any finite number in N0 = {1, 2, 3, … }. The array X is majorized by Y, or X is smaller than or equal to Y in the majorization order, denoted as X -< Y if for all i = 1,…,N:
Proposition 6.
If X is finite with length N and
=
is a natural number, then Aa -< X
a =
, where -< denotes the majorization partial order.
Proof of Proposition 6.
If Aa -< X, then, for all j = 1, …, N, and Na = . Consequently, a = .
Conversely, if a = (and hence must be a natural number), we have
and hence for all j ≤ N, and for j = N, . This shows that Aa -< X. □
Finally, we show that aX is increasing in X.
Theorem 7.
If X < Y, then aX ≤ aY.
Proof of Theorem 7.
We know that aX is the largest index such that
Now, we also know that for all i ≥ 1, yi ≥ xi. Hence, and . This leads to
Hence, also
This can be written as
As aY is the largest index with property (12), this shows that aX ≤ aY. □
Remark 2.
If X < Y (strict), then it is possible that aX = aY. An example is given by X = (6,1,1) < Y = (6,2,1), for which aX = aY = 3.
5. Conclusions
In this article, we studied the following problem:
Given a converging decreasing array X in (R+)∞, find the largest natural number a such that the Euclidean distance d(X,Aa) is minimal.
We have shown that this problem has a solution, which is always situated in the interval . Yet, the solution is not necessarily unique. It was shown that a discrete and an analogous continuous problem have related but not the same solutions. Our contribution illustrates how a formalism derived in the context of research evaluation and informetrics [1] can be used to solve a purely mathematical problem.
Author Contributions
Conceptualization, L.E.; Formal analysis, L.E. and R.R.; Writing—original draft, L.E.; Writing—review & editing, L.E. and R.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hirsch, J.E. An index to quantify an individual’s scientific research output. Proc. Natl. Acad. Sci. USA 2005, 102, 16569–16572. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bouyssou, D.; Marchant, T. Ranking scientists and departments in a consistent manner. J. Am. Soc. Inf. Sci. Technol. 2011, 62, 1761–1769. [Google Scholar] [CrossRef] [Green Version]
- Waltman, L.; van Eck, N.J. The inconsistency of the h-index. J. Am. Soc. Inf. Sci. Technol. 2012, 63, 406–415. [Google Scholar] [CrossRef]
- Egghe, L. Theory and practise of the g-index. Scientometrics 2006, 69, 131–152. [Google Scholar] [CrossRef]
- Alonso, S.; Cabrerizo, F.J.; Herrera-Viedma, E.; Herrera, F. H-index: A review focused in its variants, computation and standardization for different scientific fields. J. Informetr. 2009, 3, 273–289. [Google Scholar] [CrossRef] [Green Version]
- Egghe, L. The Hirsch-index and related impact measures. Annu. Rev. Inf. Sci. Technol. 2010, 44, 65–114. [Google Scholar] [CrossRef]
- Rousseau, R.; Egghe, L.; Guns, R. Becoming Metric-Wise: A Bibliometric Guide for Researchers; Chandos: Oxford, UK, 2018. [Google Scholar]
- Egghe, L.; Rousseau, R. Polar coordinates and generalized h-type indices. J. Informetr. 2020, 14, 101024. [Google Scholar] [CrossRef]
- Egghe, L.; Rousseau, R. Infinite sequences and their h-type indices. J. Informetr. 2019, 13, 291–298. [Google Scholar] [CrossRef]
- Egghe, L.; Rousseau, R. Solution by step functions of a minimum problem in L2 [0,T], using generalized h- and g-indices. J. Informetr. 2019, 13, 785–792. [Google Scholar] [CrossRef]
- van Eck, N.J.; Waltman, L. Generalizing the h-and g-indices. J. Informetr. 2008, 2, 263–271. [Google Scholar] [CrossRef] [Green Version]
- Hardy, G.H.; Littlewood, G.E.; Pólya, G. Inequalities; Cambridge University Press: Cambridge, UK, 1934. [Google Scholar]
Figure 1.
Zone R in (x1,x2)-plane where aX = 1.

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Egghe, L.; Rousseau, R. Minimal Impact One-Dimensional Arrays. Mathematics 2020, 8, 811. https://doi.org/10.3390/math8050811
AMA Style
Egghe L, Rousseau R. Minimal Impact One-Dimensional Arrays. Mathematics. 2020; 8(5):811. https://doi.org/10.3390/math8050811
Chicago/Turabian StyleEgghe, Leo, and Ronald Rousseau. 2020. "Minimal Impact One-Dimensional Arrays" Mathematics 8, no. 5: 811. https://doi.org/10.3390/math8050811
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.