
Spectral Analysis of the Infinite-Dimensional Sonic Drillstring Dynamics
1
Department of Mathematics, Faculty of Sciences of Monastir, Monastir 5000, Tunisia
2
ST Department, University of Evry, Paris Saclay, 91000 Evry, France
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Mathematics 2023, 11(11), 2426; https://doi.org/10.3390/math11112426
Submission received: 3 April 2023
/
Revised: 24 April 2023
/
Accepted: 30 April 2023
/
Published: 24 May 2023
(This article belongs to the Special Issue Advances in Complex Systems and Their Control Principles)
Abstract
:By deploying sonic drilling for soil structure fracturing in the presence of consolidated/ unconsolidated formations, this technique greatly reduces the friction on the drillstring and bit by using energetic resonance, a bit-bouncing high-frequency axial vibration. While resonance must be avoided, to our knowledge, drilling is the only application area where resonance is necessary to break up the rocks. The problem is that the machine’s tool can encounter several different geological layers with many varieties of density. Hence, keeping the resonance of the tool plays an important role in drill processes, especially in tunnel or infrastructure shoring. In this paper, we analyze the sonic drillstring dynamics as an infinite-dimensional system from another viewpoint using the frequency domain approach. From the operator theory in defining the adequate function spaces, we show the system well-posedness. The hydraulic produced axial force that should preserve the resonant drillstring mode is defined from the spectrum study of the constructed linear operator guided by the ratio control from the top to tip boundary magnitudes.
1. Introduction
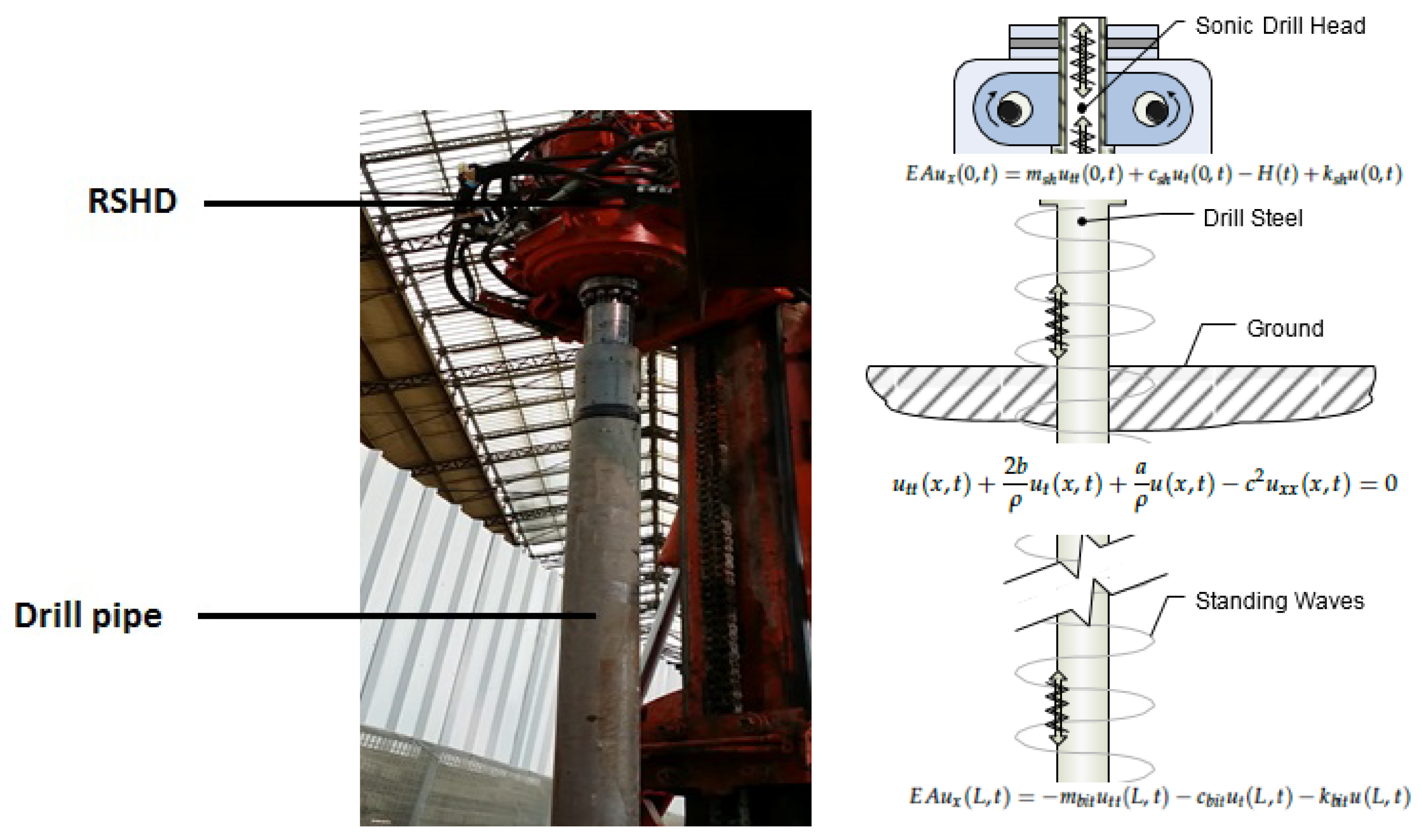
Sonic drilling has been used in industry for many years [1,2,3,4]. This technique makes penetrating for a large range of soils much easier. Most of the research has been conducted by the private sector, which has kept the expertise it has developed in-house and proprietary [5]. However, it is known from the current field studies that the main source of drillstring vibration is the force generated by two eccentric masses coupled to a hydraulic system. It can be defined as a harmonic force for deriving the mathematical equations. In reality, the excited force depends on the rock mechanical properties, the shape of the drill bit, the frequency of the masses, the air pressure, and the cross-sectional area of the hammer. In [6], bond graph modeling formalism is used to develop drillstring dynamics. Currently, sonic drilling rigs are operated mainly by “feel” and “ear.” Although equipped with numerous gages, the success of sonic drilling depends on the experience of the operator; less experienced drillers are not successful on sonic rigs. The main objective is to keep the drillstring resonant [7,8]. Technically, resonant frequencies of 50 to 150 Hz are audible, and the driller controls the energy generated by the sonic eccentrics according to the formation encountered to achieve maximum drilling productivity. If the damper cannot absorb all the energy entering the system, the vibration amplitude of the system will increase until the system fails. Therefore, the input force is an important operating parameter and a primary point of tuning to produce the maximum amplitude when the frequency of the vibration matches the natural frequency of vibration of the system (resonant frequency). Once the frequency is set, the operator manually moves the column and verifies that the tool moves smoothly while ensuring that the vibration mode is maintained during the penetration of the soil (see Figure 1). This process takes a lot of time and can have a negative impact on operating costs and machine loss. In the Newtun project, proposed as an alternative to conventional tunnel excavation [9], the reader will learn more details about the experimental drilling method: the type of drilling rig used, type of rock, type of drill pipe, drilling tools, etc.
Drillstring dynamics modeling is critical for the system analysis and control of damaging vibrations. Much research has been conducted to mathematically describe the physical phenomena that occur during the drilling process. Starting from linear algebra theory, researchers began with models with lumped parameters in which the drillstring is viewed as a mass-spring-damper system whose dynamics are described by an ordinary differential equation (ODE) (see [10,11,12,13,14]). This finite-dimensional system representation did not respect the distributed nature of the drilling structure. Consequently, distributed parameter models appeared and they provided a characterization of the drilling variables in an infinite dimension which added more accuracy to the model in reproducing the rod oscillatory behavior. For the case of a distributed parameter model, see [15,16,17,18,19,20,21]. The drawback of this second type of modeling was the complexity involved in its analysis and simulations. Then arose the neutral-type time-delay models which were directly derived from the distributed parameter ones. The transformation of the partial differential equations (PDE) model to the time-delay system was first introduced in [22]. This kind of modeling was used in [23,24,25,26,27] for control purposes.
This paper is organized as follows. In Section 2, we derive the mathematical model that describes the sonic drillstring dynamics. The drillstring dynamic global existence and the uniqueness of the solution is detailed in Section 3 (well-posedness). In Section 4, we analyze the spectrum of the defined operator and its exponential stability, and we prove that the operator does not contain a point on the imaginary axis. The details of the spectral analysis and the numerical results are presented in Section 5. Finally, some conclusions are part of Section 6.

2. Mathematical Model
In order to reduce the complexity of the system and thus derive a mathematical model, it is necessary to make some initial assumptions and simplifications of the system when choosing the boundary conditions [29]. It is assumed that the drillstring is a long pipe with a uniform cross-sectional area A and the effect of torsional vibrations is negligible. It is assumed that the forces exciting the drillstring act at the tip of the sonic drill. Because the damping along the length is very small, the sonic drill operator must be very careful not to overload the drillstring at resonance when the lower drill tip is not involved in drilling. Damping at the drill tip is the most important variable of the drilling system because it determines the drilling work that takes place.
The governing differential equations of motion for the sonic drill are derived from the force balance. We denote by the longitudinal displacement of a rod’s section A, that is, a distance x from the vertices at time t.
where is the pipe density, E is the Young modulus, a and b are, respectively, the coupling and damping constants along the length of the drillstring, and is the stress given by . So, we obtain
Dividing this last by , we obtain
We define the speed of the sound through the steel drill c by .
Equation (3) becomes
With . It remains to define the boundary conditions of the drillstring dynamics given above.
To calculate the natural frequencies of the drillstring, the boundary conditions at the ends of the string must be known when deriving the frequency functions. The mass of the sonic driver, the input force of the sonic driver, and the air spring are all located where x is zero. The mass of the sonic driver and the air spring are always boundary conditions. At the drillstring tip, where x equals the drillstring length L, there is a boundary condition caused by the coupling of the sonic drill tip to the material being drilled through. All boundary conditions are at the ends of the drillstring, and therefore all conditions must equal the apparent forces at the end conditions. The forces for the ends are determined by multiplying the elastic constant E of the drillstring by the cross-sectional area of the drillstring A, and also by the partial derivative of the local deflection u with respect to the location in space x, and equating this to the boundary condition, as shown in Figure 1 (right).
Top boundary condition ():
where is the mass of the sonic head, and are, respectively, the spring and the damping rates of the air spring on top of the sonic drill.
Tip boundary condition ():
and the initial conditions are
where is the mass of the sonic drill bit, and are, respectively, the spring and the damping rates of the drill bit while drilling.
3. Well-Posedness
In this section, we will prove the global existence and the uniqueness of the solution of the problem (3)–(7). For this purpose, we will use a semigroup formulation of the initial-boundary value problem (3)–(7). If we denote , we define the energy space:
Clearly, is a Hilbert space with respect to the inner product
for
,
Therefore if , the problem (3)–(7) is formally equivalent to the following abstract evolution equation in the Hilbert space :
where denotes the derivative with respect to time t.
The operator is defined by
The domain of is given by
We have the following.
Theorem 1.
The operator generates a semigroup of contractions on .
Proof.
According to the Lumer–Phillips theorem, we should prove that the operator is m-dissipative.
Let . By definition of the operator and the scalar product of , we have
From Green’s formula, we obtain
Consequently the operator is dissipative.
Now, we want to show that for is surjective.
For , let be the solution of
which leads to
To find the solution of the system (14)–(19), we suppose u is determined with the appropriate regularity. Then, from (14), (16), and (18), we obtain
Consequently, knowing u, we may deduce by (20).
We recall that because , we automatically obtain and .
The variational formulation of problem (21), (22) is to find such that
for any . Because , the left-hand side of (24) defines a coercive bilinear form on H. Thus, by applying the Lax–Milgram theorem, there exists a unique solution of (24). Now, choosing , is a solution of (21) in the sense of distribution and therefore . Thus, using Green’s formula and exploiting Equation (21) on , we finally obtain
Thus verifies (17), (19) and we recover , and , and thus by (20), we obtain and we have found the solution of . This completes the proof of Theorem 1. □
We have, in particular, that the Cauchy abstract problem
admits for all a unique solution . Moreover, for the system (26) admits a unique solution
and satisfies the following energy identity:
where
Proposition 1.
4. Stability of the Semigroup
Recall the following frequency domain theorem for exponential stability from [30,31] of a -semigroup of contractions on a Hilbert space:
Theorem 2.
Let A be the generator of a -semigroup of contractions on a Hilbert space X. Then, is exponentially stable, i.e., for all ,
for some positive constants C and δ if and only if
and
where denotes the resolvent set of the operator A.
We are now in a position to state the first main result of this section:
Theorem 3.
There exists such that
Proof.
Our first concern is to show that is not on the spectra of for any real number , which clearly implies (29). We have the following:
Lemma 1.
The spectrum of contains no point on the imaginary axis.
Proof.
Because the resolvent of is compact, its spectrum only consists of eigenvalues of . We will show that the equation
with and has only the trivial solution.
By taking the inner product of (31) with V and using
one obtains . Next, we obtain the following ordinary differential equation:
- If , thenHence, This implies that .
- If , then and . So, .
We deduce that the system (33) has only the trivial solution. □
Now, suppose that condition (30) does not hold. This gives rise, thanks to the Banach–Steinhaus theorem (see [32]), to the existence of a sequence of real numbers and a sequence of vectors with such that
i.e.,
The ultimate outcome will be convergence of to zero as , which contradicts the fact that
Now, let us take the inner product of (37) with . A straightforward computation gives
Lastly, the sufficient conditions of Theorem 2 are fulfilled and the proof of Theorem 3 is completed. □
5. Spectral Analysis and Numerical Study
is an eigenfunction of of the associated eigenvalue iff
equivalent to
5.1. Frequency Domain Analysis
We take the Laplace transform with respect to the time t of (4)–(7) and the temporal frequency will be denoted . We denote by , , respectively, the Laplace transform of and such that So, we obtain, for ,
where H(t) = , is an eigenvalue of , and is the associated eigenfunction.
where is an eigenvalue of and is the associated eigenfunction.
5.2. Numerical Simulation
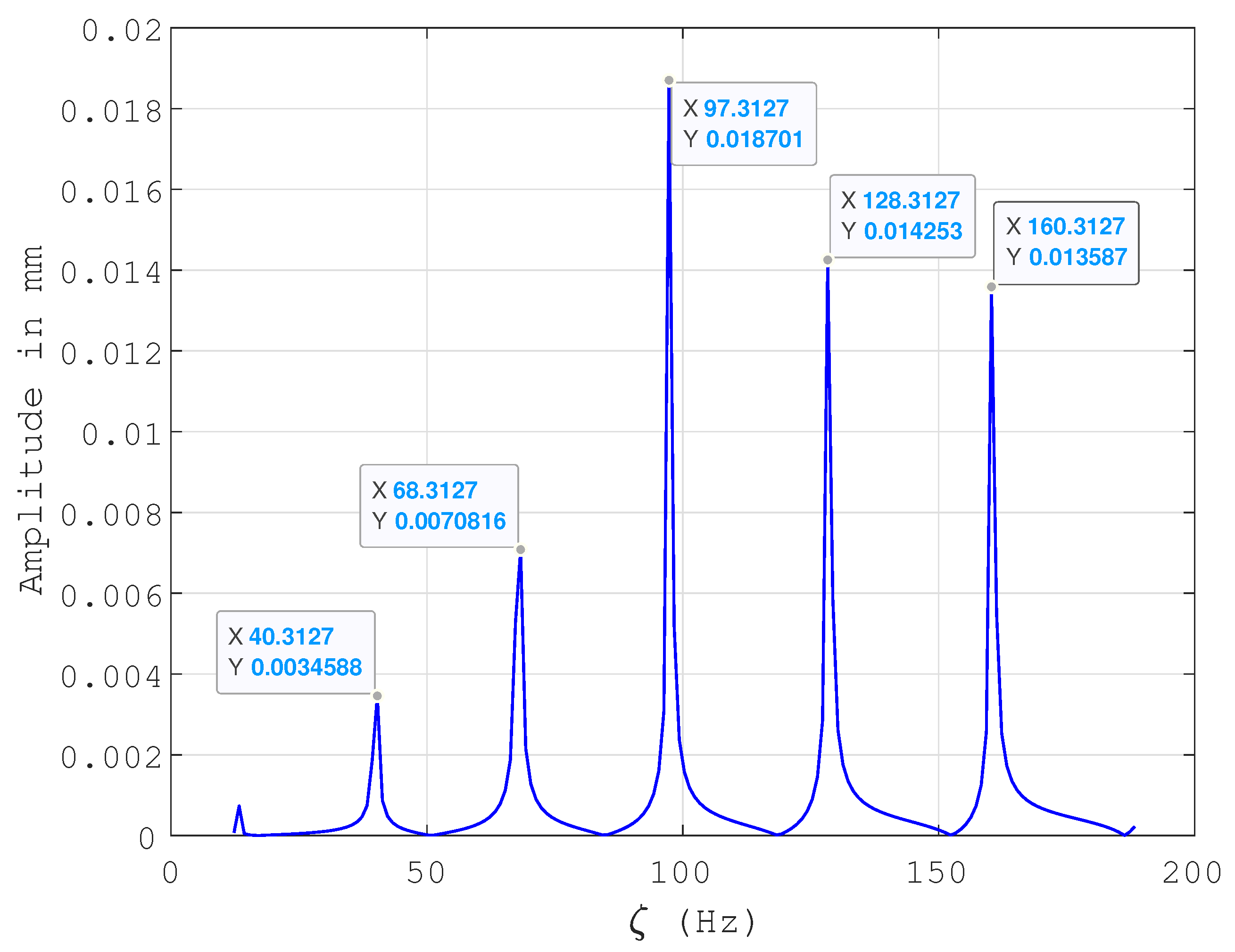
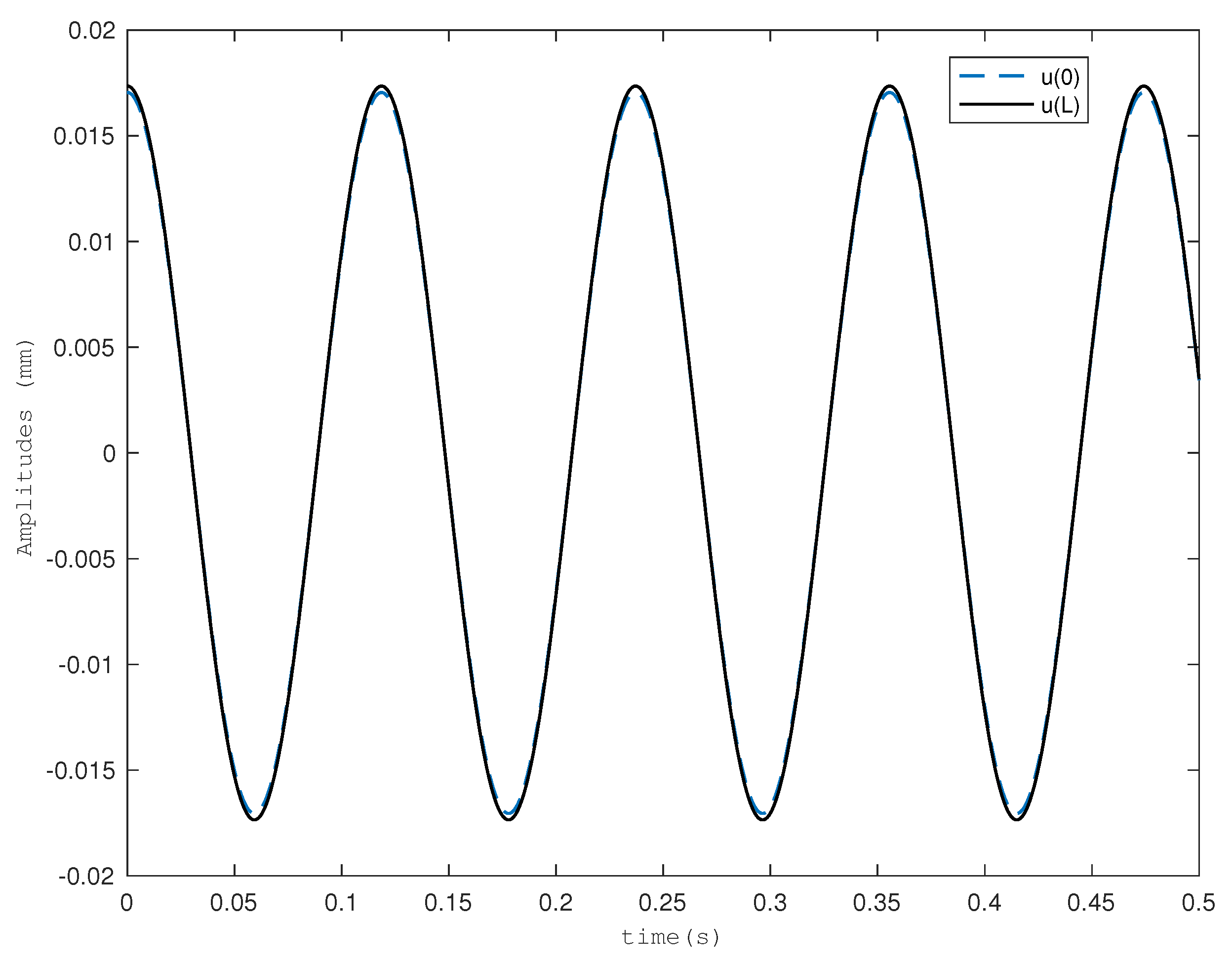
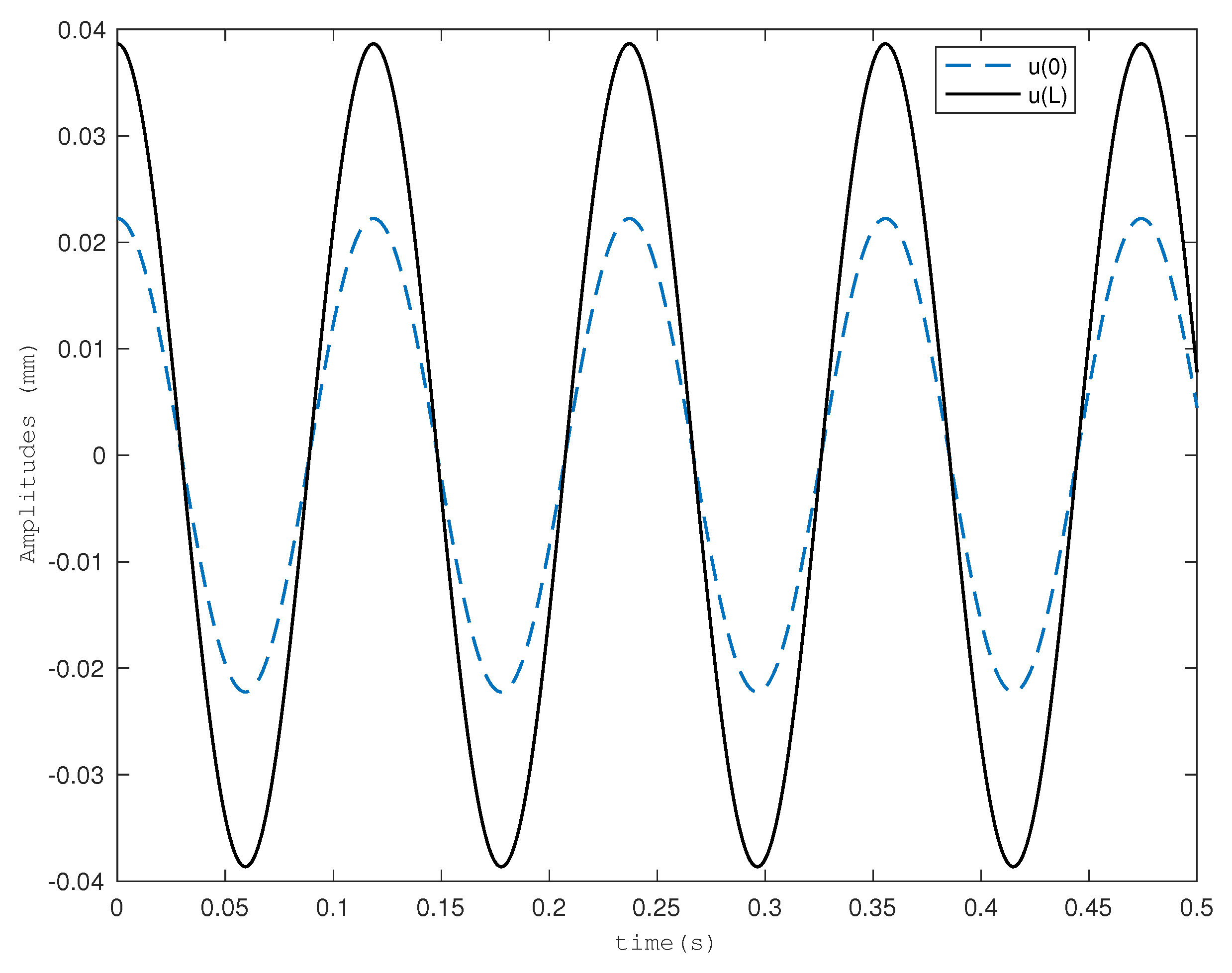
The differential operator was discretized using the Matlab Cheb/Chebfun algorithm in order to compute the associated eigenvalues [33]. Figure 2 shows the various values of the temporal frequencies that must be taken in the formulation of the eccentric masses frequency of rotation (mechanical part producing the percussion force). A maintained frequency around produces a practical ration () in the amplitude boundaries from the top to the drill bit bouncing (Figure 3) which is an equilibrium in the forces supported by devices. Figure 4 illustrates an increase in amplitude at the expense of a rather strong input amplitude which may not be provided by the system. Finally, a set of the drillstring system parameters used in the simulation is presented in Table 1.
6. Conclusions
A rigorous spectral analysis is detailed for the sonic distributed parameter drillstring dynamics where from the operator construction, formally equivalent to the abstract evolution equation in the defined Hilbert space, the problem well-posedness is proved after a semigroup formulation of the initial-boundary value problem. Details of the spectral/frequency domain analysis and the numerical operator descretization show that the input-control amplitude which is harmonic depends on an appropriate resonant mode around 68 Hz, leading to a ratio of amplitudes between the input/output system boundaries. Indeed, in order to complete our investigation, controlling these vibrations allows, on the one hand, the optimization of the drilling by channeling the energy along the drillstring and, on the other hand, the possibility to later engage the drilling head by a manipulator robot without fearing its malfunction. Based on this fact, a vibration model with distributed parameters has been established and its boundary control and integration represent the perspective of this work.
Author Contributions
Conceptualization, L.B. and K.A.; methodology, K.A.; software, L.B.; validation, L.B.; formal analysis, K.A.; investigation, K.A. and L.B.; resources, L.B. and K.A.; data curation, L.B. and K.A.; writing—original draft preparation, L.B. and K.A.; writing—review and editing, L.B.; visualization, L.B.; supervision, L.B. and K.A.; project administration, L.B.; funding acquisition, L.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by UEVE/Paris-Saclay under the FRR-action 3, including the Inbound mobility Program, 2019.
Data Availability Statement
Data available with the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rockefeller, W.C. Mechanical Resonant Systems in High-Power Applications; United Engineering Center: New York, NY, USA, 1967. [Google Scholar]
- Mao, Z.X. Research on Sonic Drilling Technology Report; China University of Geosciences: Beijing, China, 2007. [Google Scholar]
- Terry, D.B. Resonant Sonic Drilling at Three Former MGP Sites: Benefits and Limitations; GEI Consultants Inc.: Woburn, MA, USA, 2003. [Google Scholar]
- Barrow, J.C. The resonant sonic drilling method: An innovative technology for environmental restoration programs. Groundw. Monit. Remediat. 1994, 14, 153–160. [Google Scholar] [CrossRef]
- Cheatham, J.B. The State of Knowledge of Rock/Bit Tooth Interactions under Simulated Deep Drilling Conditions; TerraTek Report; Bartlesville Energy Research Center, Department of Energy: Bartlesville, OK, USA, 1977. [Google Scholar]
- Sazidy, M.S.; Rideout, D.G.; Butt, S.D.; Arvani, F. Modeling Percussive Drilling Performance Using Simulated Visco-Elasto-Plastic Rock Medium; American Rock Mechanics Association: Salt Lake City, UT, USA, 2010. [Google Scholar]
- Lucon, P.A. Resonance: The Science Behind the Art of Sonic Drilling. Ph.D. Thesis, Montana State University, Bozeman, MT, USA, 2013. [Google Scholar]
- Latrach, K.; Beji, L. Axial vibrations tracking control in resonant sonic tunnel drilling system. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Latrach, K. Vers la Robotisation Duforage sonique de Pré-soutèNement: Contrôle Frontière de Vibration Axiale. Master’s Thesis, University of Paris-Saclay, Orsay, France, 24 September 2018. [Google Scholar]
- Halsey, W.; Kyllingstad, A.; Kylling, A.; Rogaland Research Ins. Torque Feedback Used to Cure Slip- Stick Motion. In Proceedings of the SPE Annual Technical Conference and Exhibition, Houston, TX, USA, 2–5 October 1988. [Google Scholar]
- Sananikone, P. Method and Apparatus for Determining the Torque Applied to a Drillstring at the Surface. U.S. Patent 5,205,163, 27 April 1993. [Google Scholar]
- Pavone, D.R.; Desplans, J.P. Application of High Sampling Rate Downhole Measurements for Analysis and Cure of Stick slip in Drilling. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 25–28 September 1994. [Google Scholar]
- Jansen, J.D.; Van Den Steen, L. Active Damping of Self-excited Torsional Vibrations in Oil Well Drillstrings. J. Sound Vib. 1995, 179, 647–668. [Google Scholar] [CrossRef]
- Serrarens, A.F.A.; Van de Molengraft, M.J.G.; Kok, J.J.; Van den Steen, L. H∞ control for suppressing stick-slip in oil well drillstrings. IEEE Control. Syst. 1998, 18, 19–30. [Google Scholar]
- Tucker, W.R.; Wang, C. An Integrated Model for Drill-String Dynamics. J. Sound Vib. 1999, 224, 123–165. [Google Scholar] [CrossRef]
- Tucker, W.R.; Wang, C. On the Effective Control of Torsional Vibrations in Drilling Systems. J. Sound Vib. 1999, 224, 101–122. [Google Scholar] [CrossRef]
- Challamel, N. Rock Destruction Effect on the Stability of a Drilling Structure. J. Sound Vib. 2000, 233, 235–254. [Google Scholar] [CrossRef]
- Fridman, E.; Mondie, S.; Saldivar, B. Bounds on The Response of a Drilling Pipe Model. IMA J. Math. Control. Inf. 2010, 27, 513–526. [Google Scholar] [CrossRef]
- Saldivar, B.; Mondié, S.; Loiseau, J.J.; Rasvan, V. Stickslip Oscillations In Oilwell Drillstrings: Distributed Parameter and Neutral Type Retarded Model Approaches. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011. [Google Scholar]
- Sagert, C.; Di Meglio, F.; Krstic, M.; Rouchon, P. Backstepping and Flatness Approaches For Stabilization of the Stick-Slip Phenomenon for drilling. IFAC Symp. Syst. Struct. Control. 2013, 46, 779–784. [Google Scholar] [CrossRef]
- Qian, Y.; Wang, Y.; Wang, Z.; Xia, B.; Liu, L. The rock breaking capability analyses of sonic drilling. J. Low Freq. Noise Vib. Act. Control. 2021, 40, 2014–2027. [Google Scholar] [CrossRef]
- Cooke, K.L.; Krumme, D.W. Differential-difference equations and nonlinear initial-boundary value problems for linear hyperbolic partial differential equations. J. Math. Anal. Appl. 1968, 24, 372–387. [Google Scholar] [CrossRef]
- Mounier, H.; Rudolph, J.; Petitot, M.; Fliess, M. A fexible rod as a linear delay system. In Proceedings of the 3rd European Control Conference, Roma, Italy, 5–8 September 1995; pp. 3676–3681. [Google Scholar]
- Balanov, A.G.; Janson, N.B.; McClintock, P.V.E.; Tucker, R.W.; Wang, C.H.T. Bifurcation Analysis of a Neutral Delay Differential Equation Modeling the Torsional Motion of a Driven Drill-string. J. Chaos Solut. Fractals 2003, 15, 381–394. [Google Scholar] [CrossRef]
- Blakely, J.N.; Corron, N.J. Experimental Observation of Delay-Induced Radio Frequency Chaos in a Transmission Line Oscillator. Chaos. J. Nonlinear Sci. 2004, 14, 1035–1041. [Google Scholar] [CrossRef] [PubMed]
- Barton, D.A.W.; Krauskopf, B.; Wilson, R.E. Homoclinic Bifurcations in a Neutral Delay Model of a Transmission Line Oscillator. J. Nonlinearity 2007, 20, 809–829. [Google Scholar] [CrossRef]
- Saldivar, B.; Knuppel, T.; Woittennek, F.; Boussaada, I.; Mounier, H.; Niculescu, S.I. Flatness-based Control of Torsional-Axial Coupled Drilling Vibrations. In Proceedings of the 19th World Congress The Inter. Federation of Automatic Control, Cape Town, South Africa, 24–29 August 2014. [Google Scholar]
- Benchikh, L.; Perpezat, D.; Beji, L.; Cascarino, S. Method of Drilling a Ground Using a Robotic Arm. Patent WO 2016/005701 A2, 14 January 2016. [Google Scholar]
- Rao, S.; Singiresu, S. Vibration of Continuous Systems; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Prüss, J. On the spectrum of C0-semigroups. Trans. Am. Math. Soc. 1984, 284, 847–857. [Google Scholar]
- Huang, F. Characteristic conditions for exponential stability of linear dynamical systems in Hilbert space. Ann. Differ. Equ. 1985, 1, 43–45. [Google Scholar]
- Brezis, H. Analyse Fonctionnelle. In Théorie et Applications; Masson: Paris, France, 1992. [Google Scholar]
- Abell, M.L.; Braselton, J.P. Differential Equations with Maple V; Academic Press: Cambridge, MA, USA, 1994. [Google Scholar]
Figure 2.
Drillstring sonic drill model frequency response.

Figure 3.
Amplitudes for and for Hz.

Figure 4.
Amplitudes for and for = 73 Hz.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Drillstring System Parameters [9].
Table 1.
Drillstring System Parameters [9].
| L | 76.2 m | ρ | 7850 Kg/m3 |
| E | 2.1 × 10 Pa | A | 8.6 × 10 m |
| 453.6 Kg | 8 Kg | ||
| 84,040,034.023 N/m | 10 N.S/m | ||
| 2.6752 × 10 ms | 28.4 Kg | ||
| 0.06 m | 1194.519 N/m | ||
| 0 N.s/m | b | 0 N.s/m | |
| a | 2334.434 N/m | 50–200 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ammari, K.; Beji, L. Spectral Analysis of the Infinite-Dimensional Sonic Drillstring Dynamics. Mathematics 2023, 11, 2426. https://doi.org/10.3390/math11112426
AMA Style
Ammari K, Beji L. Spectral Analysis of the Infinite-Dimensional Sonic Drillstring Dynamics. Mathematics. 2023; 11(11):2426. https://doi.org/10.3390/math11112426
Chicago/Turabian StyleAmmari, Kaïs, and Lotfi Beji. 2023. "Spectral Analysis of the Infinite-Dimensional Sonic Drillstring Dynamics" Mathematics 11, no. 11: 2426. https://doi.org/10.3390/math11112426
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.