
Survey of Lévy Flight-Based Metaheuristics for Optimization


1
School of Artificial Intelligence, Wuchang University of Technology, Wuhan 430223, China
2
Key Laboratory of Symbolic Computation and Knowledge Engineering of Ministry of Education, Jilin University, Changchun 130012, China
3
Department of Computer Science and Technology, Ocean University of China, Qingdao 266100, China
4
Intelligent Information Systems Institute, Wenzhou University, Wenzhou 325035, China
5
Key Laboratory of Intelligent Image Processing and Analysis, Wenzhou 325035, China
*
Author to whom correspondence should be addressed.
Mathematics 2022, 10(15), 2785; https://doi.org/10.3390/math10152785
Submission received: 18 July 2022
/
Revised: 4 August 2022
/
Accepted: 4 August 2022
/
Published: 5 August 2022
(This article belongs to the Special Issue Evolutionary Computation 2022)
Abstract
:Lévy flight is a random walk mechanism which can make large jumps at local locations with a high probability. The probability density distribution of Lévy flight was characterized by sharp peaks, asymmetry, and trailing. Its movement pattern alternated between frequent short-distance jumps and occasional long-distance jumps, which can jump out of local optimal and expand the population search area. The metaheuristic algorithms are inspired by nature and applied to solve NP-hard problems. Lévy flight is used as an operator in the cuckoo algorithm, monarch butterfly optimization, and moth search algorithms. The superiority for the Lévy flight-based metaheuristic algorithms has been demonstrated in many benchmark problems and various application areas. A comprehensive survey of the Lévy flight-based metaheuristic algorithms is conducted in this paper. The research includes the following sections: statistical analysis about Lévy flight, metaheuristic algorithms with a Lévy flight operator, and classification of Lévy flight used in metaheuristic algorithms. The future insights and development direction in the area of Lévy flight are also discussed.
MSC:
78M50; 80M501. Introduction
With the rapid growth of the size and complexity of optimization problems, traditional optimization algorithms are becoming more uncertain for solving these problems [1,2]. Inspired by nature, metaheuristic algorithms [3,4,5] have proven to be a viable solution to this challenge for solving NP-hard problems, such as flow shop scheduling [6], economic load dispatch [7], signal processing [8], picture processing [9,10,11,12], feature selection [13,14], path planning [15,16], information processing [17,18,19,20], neural networks [21,22], shape design [23], object extraction [24], saliency detection and classification [22,25,26], cyber–physical social systems [27], facial micro-expression recognition [28], engineering optimization [29,30,31], big data and large-scale optimization [32], multi-objective and many-objective optimization [33,34,35,36,37], and the knapsack problem [38,39]. Some of the well-known methods in this area are genetic algorithms (GAs) [40,41], particle swarm optimization (PSO) [42,43,44,45,46,47], differential evolution (DE) [48,49,50,51,52], monarch butterfly optimization (MBO) [13,53,54,55,56], artificial bee colonies (ABCs) [57,58], elephant herding optimization (EHO) [59], harmony search (HS) [60,61,62,63], ant colony optimization (ACO) [64], cuckoo search (CS) [16,65,66,67,68], krill herd (KH) [69,70,71,72,73], earthworm optimization algorithm (EWA) [74], firefly algorithms (FAs) [75,76], monkey algorithms (MAs) [77,78], moth flame optimization (MFA) [79], biogeography-based optimization (BBO) [80,81], bat algorithms (BAs) [82], wolf pack algorithm (WPA) [83], and grey wolf optimization (GWO) [84].
Based on the random walk behavior of natural biological factors, a new flight mechanism, namely Lévy flight, was proposed by the French mathematician Paul Pierre Lévy in the 1930s. The probability density distribution of Lévy flight was characterized by sharp peaks, asymmetry, and trailing. Its movement pattern alternated between frequent short-distance jumps and occasional long-distance jumps, which can jump out of local optimal and expand the population search area. Because of the above characteristics of Lévy flight, it is widely used in various metaheuristic algorithms, such as cuckoo search, monarch butterfly optimization, moth search, particle swarm optimization, differential evolution, elephant herding optimization, etc. In these algorithms, Lévy flight essentially provides a random walk, while the random step length is drawn from a Lévy distribution, which is more efficient in exploring the search space as its step length is much longer in the long run. The Lévy flight originating from the Lévy distribution is an impactful random walk model on undiscovered and higher-dimensional search space, which expands effectively the search area of the individual. In this paper, a comprehensive review for the Lévy flight-based metaheuristic algorithms is presented
2. Lévy Flight
2.1. Lévy Flight-Based Metaheuristic Algorithms Research Studies
The concept of Lévy flight has been around for a long time [85,86]. Thirteen thousand Lévy flight-related studies have been published in journals/dissertations/conferences up to 23 April 2022 since Lévy flight was proposed in 1981. Figure 1 gives a temporal histogram of the collected published articles. The collected articles are from a wide variety of journals covering the research fields of mathematics, computer sciences, mechanics, physics, engineering, automation control systems, thermodynamics, chemistry, business economics, and mathematical computational biology, which indicates the wide audience of Lévy flight. Among these 3134 papers, 1761 papers were published in the mathematics field, accounting for 56.190%; 1221 papers were published in the physics field, accounting for 38.960%; 1117 papers were published in the computer sciences field, accounting for 35.641%; 972 papers were published in the engineering field, accounting for 31.015%; 828 papers were published in the mechanics field, accounting for 26.420%; 433 papers were published in the thermodynamics field, accounting for 13.816%; 413 papers were published in the chemistry field, accounting for 13.178%; 365 papers were published in the automation control systems field, accounting for 11.646%; 327 papers were published in the business economics field, accounting for 10.434%; 267 papers were published in the mathematical computational biology field, accounting for 8.519%, as shown in Figure 2 and Figure 3.
This paper systematically summarized and studied Lévy flight-based metaheuristic algorithms. The traditional metaheuristic algorithm combines Lévy flight mechanisms to give itself some optimization ability, thereby achieving better optimization behavior. From the various papers collected for this study, 159 representative papers from 1 January 2006 to 20 March 2020 are selected and used for our survey, as shown in Figure 4. Figure 5 shows the classification proportions of Lévy flight methods used in different metaheuristic algorithms. Figure 4 shows that this paper divides the Lévy flight used in metaheuristic algorithms into 10 categories. Lévy flight is the most frequently used in the variants of the cuckoo algorithm, because Lévy flight has been used to update the cuckoo position in the basic CS algorithm. The methods of Lévy flight used in neural networks and evolutionary computation ratios are used less than 10%. Furthermore, the methods of Lévy flight used in swarm intelligence and cuckoo search having Lévy flight relatively frequently, with its proportion exceeding 75%.
2.2. Lévy Flight
Lévy flight is a random walk mechanism proposed by the French mathematician Paul Pierre Lévy in the 1930s, whose walk steps meet the stable heavy-tail distribution which can make large jumps at local locations with a high probability. The probability density distribution of Lévy flight was characterized by sharp peaks, asymmetry, and trailing. Its movement pattern alternated between frequent short-distance jumps and occasional long-distance jumps, which can jump out of local optimal and expand the population search area. Many insects and animals, such as flies and reindeer, follow a trajectory similar to Lévy flight in nature. Figure 6 shows the movement trajectory of Lévy flight for 50, 100, and 1000 times in two-dimensional space, respectively.
Lévy flight is a random walk process with the following characteristics:
- Self-similarity and random fractal;
- Power law progressive, namely ‘heavy-tailed’;
- Infinite mean and infinite variance;
- Lévy flight with the generalized central limit theorem, attraction will occur when the evolutionary result is determined by the sum of a large number of random numbers.
The Lévy stable distribution can be expressed by four parameters: characteristic index α, displacement parameter μ, and scale σ and sleekness parameter β. The Fourier transform of characteristic function is summarized as follows.
The probability density function of Lévy distribution has no fixed format, which changes with parameter changes. In Lévy distribution, when α = 1, 2, β = 1, the basic function can be expressed as follows.
3. Classification of Lévy Flight Used in Intelligent Optimization Algorithms
Lévy flight is used in metaheuristic algorithms to solve different optimization problems. This is divided into four groups: metaheuristic algorithms having a Lévy flight operator, Lévy flight used in swarm intelligence, Lévy flight used in evolutionary computation, and Lévy flight used in neural networks.
3.1. Metaheuristic Algorithms Having Lévy Flight Operator
As an operator of metaheuristic algorithms, Lévy flight can effectively improve the performance of the algorithm. There are three kinds of metaheuristic algorithms that include a Lévy flight operator: the cuckoo algorithm, monarch butterfly optimization, and moth search. There are 373 papers included in the cuckoo search optimization algorithm. There are 76 and 16 papers included in the monarch butterfly and the moth search optimization algorithms, respectively. The classification of metaheuristic algorithms with Lévy flight is shown in Figure 7 and Table 1.
3.1.1. Cuckoo Search Having Lévy Flight
The CS algorithm was proposed by Yang and Deb [87] in 2009. It is a swarm intelligence algorithm inspired by the obligate brood parasitism of some cuckoo species that have a specific way of laying their eggs in the nests of other host birds. The algorithm is based on the obligate brood parasitic behavior found in some cuckoo nests by combining a model of this behavior with the principles of Lévy flight, which is a type of random walk with a heavy tail. In CS, cuckoo individual landscape using a series of straight flight paths is punctuated by a sudden 90° turn, leading to a Lévy flight style intermittent scale free search pattern. The Lévy flight essentially provides a random walk, while the random step length is drawn from a Lévy distribution, which is more efficient in exploring the search space as its step length is much longer in the long run.
Subsequently, a number of CS variants have been developed to improve the performance of the CS algorithm. Yang and Deb [88] proposed a modified CS to solve practical engineering problems in 2010. Subsequently, Yang et al. [89] reviewed the fundamental ideas of cuckoo search and the latest developments, as well as their applications, and discuss the essence of algorithms and their link to self-organizing systems in 2013. Yang et al. [90] also formulated a new cuckoo search for multi-objective optimization to validate a set of multi-objective test functions, and then applied it for solving structural design problems. The standard CS is extended by using the successful features of the cuckoo host co-evolution with multiple interacting species by Yang et al. [92] in 2017. The proposed method, the multi-species cuckoo search (MSCS), intends to mimic the co-evolution among multiple cuckoo species that compete for the survival of the fittest.
Li et al. [29] enhanced the exploitation ability of the cuckoo search algorithm by using a knowledge learning strategy. A new CS algorithm was developed by Gandomi et al. [112] to solve truss optimization problems. A novel modified cuckoo search algorithm (NMCSA) is proposed by Yang et al. [91] to solve optimal placement of actuators for active vibration control. Majumder et al. [113] propose a hybrid discrete cuckoo search (HDCS) algorithm to minimize makespan for scheduling problems, which transform a continuous position into a discrete schedule for generating a new solution. A dynamic CS with Taguchi opposition-based search (TOB-DCS) is proposed by Li et al. [67]. Dynamic evaluation and Taguchi opposition-based search are adopted in TOB-DCS, which reduces the number of function evaluations and accelerates the convergence property. Furthermore, Li et al. [16] proposed a new CS dynamic step size cuckoo search algorithm (DMQL-CS) extended with Q-Learning step size and genetic operator. Step size control strategy is used to examine the individual multi-step evolution effect, and the Q function value is calculated to learn the individual optimal step size.
Bhandari et al. [114] introduced the cuckoo search algorithm into a novel optimized brightness preserving the histogram equalization approach to preserve the mean brightness. The proposed method utilizes plateau limits to modify the histogram of the image. The sub-histograms are equalized and modified by obtaining plateau limits with the cuckoo search optimization technique. A knowledge-based cuckoo search algorithm (KCSA) is proposed by Cao et al. [93] for the scheduling field. The algorithm is used to build a self-adaptive parameter control scheme of the CS algorithm in an offline training phase. The suitable parameters are selected by proposing a knowledge base for ensuring the desired diversification and intensification of population in each iteration, which is used to generate new solutions by probability sampling in a designed mutation phase. Cao et al. [94] also presented a cuckoo search algorithm with reinforcement learning and surrogate modeling for semiconductor final testing scheduling problems with multi-resource constraints. A surrogate model is employed to reduce computational complexity.
3.1.2. Monarch Butterfly Optimization Having Lévy Flight
Monarch butterfly optimization (MBO) [55] was presented by Wang et al., in 2019, which is a new kind of nature-inspired metaheuristic algorithm by simplifying and idealizing the migration of monarch butterflies. All the monarch butterfly individuals are located in two distinct lands, and the positions of the monarch butterflies are updated in two ways: the offspring are generated by a migration operator and other butterflies by means of a butterfly adjusting operator by tuning the positions. Based on this, the optimization process consists of two operators: subpopulation 1 and subpopulation 2. The information is interchanged among the individuals of subpopulation 1 and subpopulation 2 by applying the migration operator. The butterfly adjusting operator delivers the information of the best individual to the next generation by Lévy flight. The step is calculated by implementing the Lévy flight, which can make large jumps at local locations with a high probability. The Lévy flight originating from the Lévy distribution is an impactful random walk model on undiscovered and higher-dimensional search space, which expanded effectively the search area of the individual.
Subsequently, Kim et al. [95] presented an improved MBO to solve an unequal area facility layout problem, in which search performance of MBO is accelerated by using a slicing tree representation to form a layout structure as well as greedy acceptance. Meaningful results are obtained from a set of well-known instances. The proposed algorithm provided the best solutions within a comparable amount of time.
A computational methodology based on MBO is provided by Kumar et al. [96] to solve the cost-based unit commitment (CBUC) problems, in which the binary variables of CBUC problems are handled by modifying the continuous-time nature of MBO. The experiment comparative analysis shows the proposed method is more efficient in terms of execution time and operating costs in relation to other techniques. A hybrid model based on the multivariate fuzzy time series model and the MBO (MVFTS-MBO) are been considered to predict the GDP of India by Jha et al. [115]. In the case of keeping the number of intervals constant, the MBO is used to determine the optimal length of intervals in the universe of discourse (UoD). The outcome obtained shows that the MVFTS-MBO outperformed the existing methods for the prediction of India’s GDP. Nandhini et al. [116] proposed a binary solution encoding scheme by using an improved crossover-based MBO (ICRMBO) to minimize and optimize the parameters in the Convolutional Neural Network (CNN). Two convolutional architectures, namely inception V3 and Vgg16, were optimized by using the ICRMBO, which increased the classification accuracy.
Masoudi et al. [117] presented an improved MBO algorithm, namely IMBO, to develop the optimal threshold values using a between-classes Otsu variance. In the IMBO algorithm, migration and adjusting operators are enhanced by using a new adaptive crossover rate to apply in image segmentation problems. Migration operations and butterfly adjusting operations are updated individuals in MBO. When solving engineering problems and global numerical optimization, the IMBO can outperform many state-of-the-art optimization techniques. Feng et al. [118] designed a comprehensive review of the MBO algorithm, including its modifications, hybridizations, variants, applications, and further research directions. In order to improve the threshold accuracy of segmentation and the effectiveness, the MBO algorithm for image segmentation with multiple threshold values is presented by Dorgham et al. [119], in which the MBO is applied for the image segmentation of multiple threshold values.
Bai et al. [120] designed an effective leukemia detection approach by using the Taylor monarch butterfly optimization-based support vector machine with integrated Taylor series and MBO. By extracting the features, the experiment analysis shows that the performance of classification is increased with less training time. Ates et al. [53] proposed a modified MBO algorithm (M2BO) by modeling stochastic processes using different random distribution functions. The performance of the M2BO is analyzed and optimized the feedback gain matrix for the control of the three-degree-of-freedom hover system. The results show that the M2BO increased the performance without changing the basic philosophy of algorithms by modeling stochastic processes. Alweshah et al. [13] proposed a feature selection wrapper method to subject k-nearest neighbor classification using the monarch MBO algorithm. Two modifications are performed in the proposed method. Feature selection is improved by involving the utilization of an enhanced crossover operator, and convergence speed is improved by integrating the Lévy flight distribution into the MBO. The results showed that the proposed method is superior compared with the other four metaheuristic algorithms. Yi et al. [56] proposed a new quantum-inspired MBO algorithm (QMBO), in which a certain number of the worst butterflies are updated by quantum operators. The optimal path for uninhabited combat air vehicles (UCAV) path planning navigation problems can be obtained by the proposed QMBO algorithm.
3.1.3. Moth Search Having Lévy Flight
Moth search (MS) [97] is a new kind of metaheuristic algorithm that was proposed by Wang, inspired by the phototaxis and Lévy flight of the moths in 2009. In MS, the best moth individual is viewed as the light source. Some moths that are close to the fittest one always display an inclination to fly around their own positions in the form of Lévy flight. The MS algorithm has been applied successfully to diverse fields since it was proposed. Feng et al. [38] introduced the Lévy flight operator and the fly straightly operator into the MS algorithm. Nine types of new mutation operator are specially devised to replace the Lévy flight operator. This method is used to solve the discounted (0–1) knapsack (DKP) problems. Strumberger et al. [102] hybridized the MS algorithm with artificial bee colony metaheuristics. In order to prevent premature convergence due to Lévy flight, Strumberger et al. [101] introduced a third search equation in the subpopulation to expend the search space. Then, Strumberger et al. [99] presented a hybrid recent swarm intelligence moth search algorithm to solve localization problems in wireless sensor networks. The geographical coordinates of each sensor node with an unknown position that is randomly deployed are found by using the improved algorithm.
Elaziz et al. [111] proposed an alternative method based on the improvement of the MS using the Differential Evolution (DE) to solve cloud task scheduling problems. This method aims to minimize makespan that required scheduling a number of tasks on different Virtual Machines (VMs). To improve the diversity of the MS and to avoid it from sticking in the local point, Fathy et al. [110] developed an enhanced MS with a disruptor operator (DO). This method is employed to identify the optimal parameters of Triple-Junction (TJS) photovoltaic panel for different operating conditions. Feng et al. [109] applied an improved MS algorithm to solve discrete optimization problems, in which a transfer function is charged to map a continuous search space to a discrete search space. Twelve transfer functions divided into three families are combined with MS. Twelve discrete version MS algorithms are proposed to solve set-union knapsack problems (SUKP). The transfer function effectively improved the quality of solutions and convergence rates. Feng et al. [107] considered an enhanced MS for solving SUKP, in which an enhanced interaction operator (EIO) instead of Lévy flight is introduced into the global harmony search. Feng et al. [108] proposed an improved MS based on self-learning (SLMS) to solve the 0–1 multidimensional knapsack problem (MKP) with many diverse applications. In SLMS, a self-learning flight straightly operator is introduced to make each individual learn from any one better than itself, not just the global best individual.
Hussein et al. [105] used a new alternative machine learning method that combined the random vector functional link network (RVFL) and MS to improve the performance of the RVFL by using optimal features selection. This method is applied to predict the missing values of total algal count during water-quality monitoring of surface waters. Singh et al. [103] introduced a newly developed MS technique to solve the complex distributed energy resources (DER) integration problems, which minimized the cost of annual energy loss and node voltage deviations over multiple load levels.
Han et al. [106] proposed a new hybrid MS method (MSFWA) that introduced explosion and mutation operators into MS for solving constrained engineering optimization problems. MSFWA not only preserved the advantages of fast convergence, but also enhanced exploitation and exploration capability. Gokuldhev et al. [104] introduced a hybrid optimal task-scheduling algorithm with MS and the flower pollination algorithm (FPA), which chose an optimal solution for proper task scheduling in the cloud. Sun et al. [98] proposed an optimal parameter estimation method for the undetermined parameters in proton exchange membrane fuel cells by using a novel version that minimized the total of the squared deviations (TSD) between the output voltage and the experimental data.
3.2. Lévy Flight Used in Swarm Intelligence
Lévy flight as an operator effectively improved the performance of metaheuristic algorithms. Meanwhile, Lévy flight is also widely used in swarm intelligence to solve different optimization problems. Lévy flight is used in twelve swarm intelligence algorithms: Lévy flight used in the particle swarm optimization algorithm, Lévy flight used in the artificial bat algorithm, Lévy flight used in the bee colony algorithm, Lévy flight used in the whale optimization algorithm, Lévy flight used in the moth–flame algorithm, Lévy flight used in the salp swarm algorithm, Lévy flight used in the firefly algorithm, Lévy flight used in the elephant herding optimization algorithm, Lévy flight used in the sparrow search algorithm, Lévy flight used in the krill herd algorithm, Lévy flight used in the grey wolf optimization algorithm, and Lévy flight used in the ant colony optimization algorithm. The classification of Lévy flight used in swarm intelligence is shown in Figure 8 and Table 2.
3.2.1. Lévy flight Used in Particle Swarm Optimization Algorithm
Bousmaha et al. [25] presented a new training method based on hybrid particle swarm optimization (PSO) with multi-verse optimization based on Lévy flight (PLMVO), which can avoid premature convergence and can achieve a better balance between exploration and exploitation. PLMVO is utilized to search better solution space for proving its efficiency in the trapping in local minima problems. In order to solve the high-dimensional problems poorly for quantum-behaved particle swarm optimization (QPSO), Liu et al. [121] introduced two strategies, Lévy flight and straight flight (SF), into QPSO, named LSFQPSO. The LSFQPSO showed good performance for solving engineering design optimization problems.
Haklı et al. [122] presented an improved PSO algorithm combined with Lévy flight (PSOLF). The particle is redistributed in the search space with the Lévy flight method when the limit value determined is exceeded by a particle, which improved global search capability. Jensi et al. [123] introduced Lévy flight into the PSO namely PSOLF for updating particle velocity. The results show that the PSOLF have better performance and higher convergence rates than the standard PSO algorithm. Chegini et al. [124] introduced a new hybrid method called PSOSCALF that combined with position updating equations in the sine–cosine algorithm (SCA) and the Lévy flight approach. More effective searches occurred in the search space by using Lévy flight with large jumps. Zhang et al. [125] proposed a hybrid discrete particle swarm optimization (DPSO) algorithm with Lévy flight to establish an optimized model for the multiple-input and multiple-output (MIMO) radar task scheduling.
Bejarbaneh et al. [47] used a novel hybrid PSO algorithm that combined the sine–cosine algorithm (SCA) and Lévy flight to propose two different designs of a robust control system for the nonlinear model. The proposed method not only gave stunning time–domain performances but also showed higher robustness in the presence of disturbances and parametric uncertainties. Chen et al. [126] proposed a photovoltaic maximum power tracking (MPPT) control algorithm with Lévy flight to change the formula of particles. The characteristics of short-step and occasionally long-step jump are used to improve the diversity of particles in the algorithm population, which can effectively improve the dynamic quality of the photovoltaic power generation system and the maximum power tracking efficiency under uncertain environments. Habib et al. [127] presented an improved combinational algorithm based on the integration of Lévy flight randomization and multi-objective particle swarm optimization (MOPSO-Lévy). MOPSO-Lévy has achieved superior performance compared with other multi-objective algorithms.
Luan et al. [46] presented an improved quantum-behaved particle swarm optimization algorithm (LQPSO), which established a class of fuzzy portfolio models with transaction costs and background risk in real dealing processes. The Lévy flight strategy and the contraction–expansion coefficient with nonlinear structure are taken into account for enhancing exploration ability in the LQPSO algorithm. Motamarri et al. [128] proposed a velocity of particle swarm optimization-based Lévy flight (VPSO-LF) for global maximum power point tracking (MPPT) of the photovoltaic (PV) system under partial shading conditions (PSO). Tracking time is less to reach the global peak of PV array when verified with VPSO-LF. An efficient hybrid multi-objective PSO algorithm with particle filter and Lévy flight (PLMEAPS) is developed to find feasible solutions, which benefited from the synergy of decomposed multi-objective evolutionary algorithms (MOEA/D) and PSO algorithms [129].
Charin et al. [130] proposed a hybrid PSO algorithm(LPSO) integrated Lévy flight and particle swarm optimization, which is applied to track the maximum power point of photovoltaic (PV) systems under partial shading conditions and to extract the global maximum power point (GMPP). Dash et al. [131] proposed an efficient hybrid optimization algorithm based on sine–cosine and particle swarm optimization with Lévy flight (PSOLVSC). The PSOLVSC replaced neural networks with deep architecture for handling big and time-varying databases. Lu et al. [46] presented an improved quantum-behaved particle swarm optimization algorithm (LQPSO), in which Lévy flight and the contraction–expansion coefficient with nonlinear structure are taken into account. Kalakanti et al. [132] designed a hybrid approach using the PSO algorithm and the firefly algorithm (FFA) with a Lévy flight to solve the electric vehicle charging scheduling (EVCS). The EVCS has been evaluated to find the best hybrid variant that validates the effectiveness on both synthetic and real-world transportation networks. Yang et al. [133] proposed a fault recovery reconfiguration strategy for DC distribution networks based on a hybrid PSO algorithm introducing Lévy flight. Chegini et al. [134] proposed a new hybrid approach used the relatively new swarm decomposition (SWD) method and the optimized compensation distance evaluation technique (OCDET) to enhance the signal processing stage. The hybrid optimization algorithm combined PSO with the sine–cosine algorithm (SCA), having Lévy flight to improve the support vector machine (SVM) classifier. Mukherjee et al. [135] designed a new Lévy flight-based adaptive PSO technique to solve complex mathematical benchmark functions and practical electrical engineering problems.
3.2.2. Lévy Flight Used in Bat Algorithm
Boudjemaa et al. [136] proposed an improved version of the classical bat algorithm (BA), named the fractional Lévy flight bat algorithm (FLFBA). In the FLFBA, a local search procedure based on Lévy flight is used to update the velocity, which helped individuals to escape from local optimal values. Wang et al. [137] developed an improved bat algorithm based on Lévy flight and adjustment factors, in which dynamically decreasing inertia weight is added to update the velocity. The global search ability is improved because of the search strategy of Lévy flight. Wang et al. [137] proposed an improved bat algorithm with Lévy flight and inertial weight, in which the Lévy flight changed the flight direction of the bat individuals, and linear inertial weights prevented premature convergence of the algorithm. Saji et al. [140] proposed a new discrete bat algorithm to solve the famous traveling salesman problem. Random walks based on Lévy flight are combined with bat movements to avoid getting stuck in local minima and to enhance the searching strategy.
3.2.3. Lévy Flight Used in Artificial Bee Colony
Hajizadeh et al. [139] proposed a new hybrid multi-objective algorithm constructed multi-objective artificial bee colony algorithms (ABC) and Lévy flight to deal with the deployment problem. Ghafarzadeh et al. [141] proposed an improved ABC-based Lévy distribution random walk to promote the ABC algorithm for solving the number of functional evaluations and for obtaining better convergence speeds. Aydoğdu et al. [142] proposed an enhanced artificial ABC, adding Lévy flight distribution to formulate optimum design problems of steel space frames, which demonstrated its robustness and efficiency. Chen et al. [143] presented an improved artificial bee colony algorithm, namely an artificial bee colony algorithm based on an escaped foraging strategy (EFSABC), in which Lévy flight and search strategies are introduced. The results show that the EFSABC algorithm outperformed the traditional artificial bee colony algorithm in all aspects. Dong et al. [144] designed an improved ABC algorithm (DSM-ABC) combined with a dual-search mechanism containing differential self-perturbation and Lévy flight. DSM-ABC is applied to three classical structural design problems, including gear train design, cantilever beam design, and three-bar truss design. Jadon et al. [145] proposed a modified ABC algorithm named EcABC that composed two local search strategies, Lévy flight random walk and classical unidimensional search. In order to find more promising solutions in the territory of the best individual, EcABC is applied on the best individual of each iteration.
Liu et al. [146] designed a new algorithm based on a dynamic penalty function and Lévy flight (DPLABC), in which four modifications are put forward. Lévy flight with a logistic map is applied into the employed bee phase, and the dynamic penalty method is used to handle the constraints. The results indicated that DPLABC is competitive with other algorithms for solving constrained optimization problems. Panda et al. [147] proposed a modified ABC algorithm with Lévy flight swarm intelligence, namely an artificial bee colony Lévy flight stochastic walk (ABC-LFSW). ABC-LFSW is applied to solve asset assignment problems based on signal-to-noise ratio (SNR) optimization networks with quality of service constraints. Rambabu et al. [148] proposed a hybrid artificial bee colony and a monarchy butterfly optimization algorithm (HABC-MBOA)-based cluster head selection scheme for the predominant selection of cluster heads under clustering processes. In HABC-MBOA, the employee bee phase of ABC is replaced by a mutating butterfly adjusting operator for preventing earlier trapping of solutions into a local optimal point. Shan et al. [149] developed a self-adaptive hybrid enhanced ABC algorithm that introduced these modifications: Lévy flight initialization, self-adaptive mechanism, and chaotic opposition-based learning (OBL) for scout bee step.
Sharma et al. [150] proposed an improved ABC algorithm named as the opposition-based Lévy flight ABC algorithm, based on Lévy flight random walk and incorporated with the ABC algorithm along with an opposition-based learning strategy. The experiment results showed that the proposed method outperformed the basic ABC and other variants. Sharma et al. [151] developed an improved ABC algorithm integrated with the Lévy flight search strategy named as the Lévy flight ABC algorithm (LFABC), in which the step sizes are automatically adjusted and the global search capability can be achieved by tuning the Lévy flight parameters. Yahya et al. [152] proposed a multi-objective artificial bee colony (MOABC) with Lévy flight to determine the optimum construction site layout, which is intended to optimize the dynamic layout of an unequal area under two objective functions.
Yonar et al. [57] proposed an enhanced ABC algorithm with Lévy flight (LABC) to improve the exploitation ability of the ABC algorithm for the parameter estimation of 3-p distribution. The results, compared with other well-known metaheuristic algorithms, show that the LABC gave more accurate maximum likelihood (ML) estimations than other metaheuristic algorithms. Zhou et al. [58] developed a multi-objective hybrid artificial bee colony (MOHABC) algorithm which is applied in service composition and optimal selection (SCOS) for cloud manufacturing. The concept of Pareto dominance is used to direct the searching of a bee swarm and in MOHABC. At the same time, a cuckoo search with Lévy flight is introduced to maintain the diversity of population.
3.2.4. Lévy Flight Used in Whale Optimization Algorithm
Abd Elaziz et al. [154] proposed a developed method named the multi-leader whale optimization algorithm (MLWOA) that aimed to avoid the limitations of the traditional whale optimization algorithm (WOA) during the searching process. MLWOA was achieved by using the different tools with WOA, such as Lévy flight, self-learning strategy, multi-leader method, and memory mechanism, which enhanced the robustness of the algorithm. Deepa et al. [155] proposed an improved WOA with Lévy flight mechanism (LWOA) for embedding coverage optimization wireless sensor networks (WSN), which can allow trapping of the local optima to balance the exploration ability of WOA. Lai et al. [156] developed an enhanced WOA that incorporated Lévy flight and distribution (LFWOA) to increase productivity at the Klang Gate Dam (KGD).
A novel global exploration whale optimization algorithm (EGE-WOA) was developed by Liu et al. [157]. Lévy flight is introduced to enhance its global exploration efficiency for unconstrained optimization problems and constrained optimization problems in EGE-WOA. The EGE-WOA can indeed effectively improve the global exploration efficiency of the WOA. Liu et al. [158] designed a hybrid WOA with Lévy flight and differential evolution (WOA-LFDE) to solve job shop scheduling problems. The convergence of WOA and the abilities of global search are enhanced by changing the expression of Lévy flight and the DE search strategy.
Yan et al. [159] proposed a hybrid WOA called the LI-LWOA, based on the Lévy flight strategy (LWOA) and lateral inhibition (LI) to solve the underwater image matching problem in an unmanned underwater vehicle (UUV) vision system. The Lévy flight strategy can expand the search space to escape from local extremes in LI-LWOA. Subsequently, Yan et al. [160] proposed an enhanced whale optimization algorithm which added the Lévy flight strategy and the ranking-based mutation operator, which realized complementary advantages to balance exploration and exploitation.
3.2.5. Lévy Flight Used in Moth–Flame Algorithm
Abu Khurmaa et al. [79] proposed an enhanced moth–flame optimization (MFO) algorithm within a wrapper feature selection framework, which aims to improve the classification tasks in medical applications. The proposed modification strategy is based on two stages of enhancement such as the Lévy flight operator and binary variants. Bandopadhyay et al. [161] developed an improved metaheuristic optimization method named the hybrid multi-objective moth flame optimization (HMOMFO) that integrated the particle swarm optimization (PSO) technique and the Lévy flight method. The aim of HMOMFO is to enhance the searching and exploitation capabilities. Khurma et al. [162] proposed an effective metaheuristic approach that integrated the Lévy flight and evolutionary selection operators into the MFO to solve the feature selection problem for medical applications. The exploratory behavior of the MFO and mitigating the stagnation in local minim are enhanced by using the Lévy flight operator.
To establish a data-driven model for the residual capacity estimation, Ni et al. [163] proposed an improved moth–flame optimization in which the adaptive weight and Lévy flight are introduced to the MFO to prevent the local optimal value. Rahman et al. [164] proposed three new metaheuristic algorithms such as DE with different mutation strategy variation, MFO, and Lévy flight to optimize the trade-off between the total cost of tardiness and batch delivery. The proposed algorithm is validated on a set of distribution problems with sequence dependent setup time for multiple customers in flow shop environments. Suja et al. [165] developed a Lévy flight moth–flame optimization (LFMFO) to improve the performance and to mitigate the power quality (PQ) issues in the smart grid (SG) system. Lévy flight is utilized in the SG system to avoid the local optima and to improve the global search of MFO.
3.2.6. Lévy Flight Used in Salp Swarm Algorithm
Nautiyal et al. [31] proposed an improved salp swarm algorithm (SSA) based on Gaussian, Cauchy, and Lévy flight mutation schemes, in which the Gaussian mutation is used to enhance the neighborhood-informed ability, the Cauchy mutation is used to increase the global search ability, and the Lévy flight mutation is used to increase the randomness of the search. Ren et al. [166] designed an improved SSA integrated with adaptive weight and the Lévy flight mechanism. The solution space is explored by using random walk of Lévy flight, which enhanced and well adjusted the global exploratory and local exploitation capabilities of the algorithm. Nasri et al. [167] presented a new metaheuristic algorithm called the Lévy flight trajectory-based salp swarm algorithm (LSSA) to estimate model parameters, double diode (DD), and estimated single diode (SD) for simulation and optimization of photovoltaic (PV) systems. The Lévy flight trajectory characteristic of long jump steps enhanced population diversity in LSSA. The results show that LSSA offered very competitive results for estimating PV parameters. Zhang et al. [168] established an improved SSA based on Lévy flight and the sine–cosine operator (LSC-SSA). The solution space is searched with the Lévy flight mechanism using the route of short walks combined with long jumps, which can effectively improve the global exploration capability of the algorithm.
3.2.7. Lévy Flight Used in Firefly Algorithm
Peng et al. [75] established a new light firefly algorithm, namely Lévy flight (FAFA), to obtain the optimal thresholds for multilevel thresholding image segmentation by maximizing the Rényi entropy. An adaptive parameter strategy based on Lévy flight is used to improve the performance of the FAFA. Wu [76] provided an adaptive logarithmic spiral Lévy firefly algorithm (AD-IFA) to address the inadequacy of the Lévy flight firefly algorithm. Exploration and exploitation modes are adaptively switched during the search process. Yang et al. [169] intended to formulate a new metaheuristic algorithm based on Lévy flight via FA. The results suggest that the Lévy flight firefly algorithm is superior to other metaheuristic algorithms. Peng et al. [75] proposed a new FA named the Lévy flight firefly algorithm (FAFA) to obtain optimal thresholds for multilevel thresholding image segmentation by maximizing the Rényi entropy.
3.2.8. Lévy Flight Used in Elephant Herding Optimization Algorithm
Singh et al. [170] proposed a modified elephant herding optimization algorithm (IEHO) to enhance the capability of a classical algorithm for convalescent convergence rates. Lévy distribution with a step size controller is applied to update global search positions in IEHO. Wang et al. [171] put forward an improved elephant herding optimization (IEHO) algorithm to solve multi-dimensional nonlinear complex problems. The accuracy of EHO is improved by introducing Lévy flight operators and boundary mutation operators in the position update process. Then, in view of the performance of the IEHO algorithm in function optimization, an algorithm combining IEHO with the BP neural network (IEHO-BP) is proposed. The experimental results showed that the IEHO-BP is more accurate and less oscillating. Xu et al. [172] studied an improved EHO based on the Lévy flight strategy (LFEHO), which overcame the defects of low convergence accuracy, which solved detection accuracy degradation due to irrelevant or redundant feature data for intrusion detection systems (IDS).
3.2.9. Lévy Flight Used in Sparrow Search Algorithm
Li et al. [66] developed an improved chaotic sparrow search algorithm (ICSSA) integrated with Lévy flight and Kent chaotic mapping. The inertial and friction parameters of a two-link robot manipulator with unknown payloads are estimated via simulation experiments benefitting from the unique advantages. The results demonstrated that the ICSSA offers another promising approach of high-level accuracy for advanced control techniques in industry robot manipulators. Wang et al. [174] proposed a multi-strategy improved chaotic sparrow search algorithm (CISSA). Three strategies such as tent chaotic mapping, random following, and Lévy flight were combined to improve the load forecasting accuracy.
3.2.10. Lévy Flight Used in Krill Herd Algorithm
Wang et al. [175] proposed a Lévy-flight krill herd (LKH) algorithm to solve optimization tasks within limited computing. A new local Lévy flight (LLF) operator is included during the process for updating krill to improve efficiency. Guo et al. [176] presented an improved krill herd (IKH) approach to exchange information between top krill during motion calculation process, which generated better candidate solutions. Krill herd motion calculation is updated by using Lévy flight distribution and an elitism scheme. This IKH preserved the robustness of the basic KH algorithm while accelerating the global convergence speed.
3.2.11. Lévy Flight Used in Grey Wolf Optimization Algorithm
Chen et al. [177] developed a dynamically adjusting inertia weight and Lévy flight strategy based grey wolf optimization algorithm (DFGWO). Lévy flight is performed with high probability at the beginning of the iteration to improve the global search ability and to increase the population diversity. Gupta et al. [178] introduced an improved leadership-based GWO (GLF-GWO), in which the leaders are updated through a Lévy flight search mechanism. GLF-GWO provided better guidance to accelerate the search process of the grey wolf optimization (GWO) algorithm and enhanced the search efficiency of leading hunters. Hu et al. [179] developed a GWO algorithm variant, namely GWOCMALOL, with a Lévy flight mechanism, a covariance matrix adaptation evolution strategy (CMAES), and an orthogonal learning (OL) strategy, which is to overhaul the shortcomings of the original process. Liu et al. [180] proposed a grey wolf optimizer based on the dimensional learning strategy (DLGWO) to improve the utilization of the population knowledge. The Lévy flight is also utilized in the DLGWO to guide the grey wolves in the swarm. Zhou et al. [181] proposed a Lévy flight and weighted distance-updated multi-objective GWO algorithm (LWMOGWO) to compute the total energy consumption of the flexible manufacturing cell (FMC) system. Heidari et al. [84] proposed an improved modified GWO algorithm named Lévy-embedded GWO (LGWO) to solve either global or real-world optimization problems. Lévy flight and a greedy selection strategy are integrated with the modified hunting phases to boost the efficacy of GWO in LGWO. Goyal et al. [182] responded with an improved multi-objective grey wolf optimization algorithm (MOGWO) to move the Pareto fronts along various mutually conflicting process responses.
3.2.12. Lévy Flight Used in Ant Colony Optimization Algorithm
Zhang et al. [183] proposed a hybrid max–min ant system (HMMAS) employing a Lévy flight strategy to deal with the shortcomings of the max–min ant system. The diversity of solutions is increased by dynamically adjusting the parameters in HMMAS. Liu et al. [184] studied an improved ant colony optimization (ACO) that employed the Lévy flight mechanism based on the Lévy distribution to the candidate selection process. The method not only guaranteed the search speed but also extended the searching space. Moreover, Liu et al. [185] proposed a greedy Lévy ACO incorporated epsilon greedy and Lévy flight to solve complicated combinatorial optimization problems, which is implemented on the top of max–min ACO to solve the traveling salesman problems. Fileccia et al. [187] used an improved ACO algorithm for the back calculation of pavement moduli from surface deflection data. The performance of the proposed algorithm is demonstrated both in terms of goodness of fitness and computational effort. Zhang et al. [188] proposed a combinational algorithm based on a cuckoo search and an ant colony optimization, in which the latter candidate solution is replaced when the candidate solution of the ACO search is better than the one by the Lévy flight. Zhang et al. [189] proposed a hybridization of ACO and CS to solve specific heating route design problems.
3.3. Lévy Flight Used in Evolutionary Computation
Lévy flight is widely used in evolutionary computations as well as in swarm intelligence algorithms. Lévy flight is used in four evolutionary computation algorithms: Lévy flight used in a differential evolution algorithm, Lévy flight used in a genetic algorithm, Lévy flight used in a memetic algorithm, and Lévy flight used in a general programming algorithm. The classification of Lévy flight used in evolutionary computations is shown in Figure 9 and Table 3.
3.3.1. Lévy Flight Used in Differential Evolution
Feng et al. [51] proposed a new differential evolutionary algorithm based on a memetic algorithm framework that can explore locally using the local search including the Lévy flight and explore globally using the differential evolutionary algorithm. The results showed that the proposed method can reduce the number of design parameters. Coelho et al. [190] presented a DE algorithm combined with Lévy flight random walks and a population diversity measure (DEL). The crossover and mutation operations are designed to help avoiding premature convergence effectively in the proposed method, which can address this vital concern for power system operations economic load dispatch (ELD). Elaziz et al. [112] studied a hybrid algorithm, namely MSDE, with moth search (MS) and differential evolution (DE), which aims to minimize makespan that is required to schedule a number of tasks on different virtual machines (VMs). The Lévy flight represented the exploration and exploitation ability, respectively, in MSDE. Suresh et al. [191] proposed a modified differential evolution (MDE) algorithm to contrast the enhancement of satellite images. The MDE is developed with an exploration phase by DE and an exploitation phase by CS, which utilized the mutation, crossover, and selection strategies together with Lévy flight. The exploitation phase modeled using Lévy flight is intensified for finding the global optimal solutions in complex enhancement problems.
Tarkhaneh et al. [192] proposed an improved DE algorithm named adaptive differential evolution with neighborhood search (ADENS) by utilizing Lévy flight, neighborhood search (NS), and Archimedean spiral. A new mutation strategy is used to generate robust solutions by combining Lévy flight with neighborhood search. Meanwhile, Tarkhaneh et al. [193] developed an improved DE with an adaptive approach and new mutation strategies to achieve good balance between exploitation and exploration. Lévy flight and Cauchy distributions are harnessed to improve the global search in the new mutation methods. Zhao et al. [194] proposed a new hybrid algorithm based on the self-adaptive gravitational search algorithm (GSA) and DE to solve single objective optimizations. A new perturbation based on Lévy flight is embedded to enhance the performance of the algorithm. The experimental solution showed that the proposed method was capable of accelerating the convergence rate effectively compared with the GSA.
3.3.2. Lévy Flight Used in Genetic Algorithm
Aghaee et al. [40] presented an improved genetic algorithm (GA) based on Lévy flight to select bands in a semi-supervised manner. Experimental results show that the proposed method has been effective in the case of sufficient training samples and the accuracy improvement is near 11% in some experiments. Zhang et al. [195] proposed a hybrid genetic algorithm (HGA) to solve type-II mixed-model assembly line balancing problems with uncertain task times. A heuristic method is utilized to seed the initial population and a discrete Lévy flight is hybridized to enhance the performance of the algorithm. The efficiency of the HGA method is verified through the results of the type-II mixed-model assembly line balancing problem.
3.3.3. Lévy Flight Used in Memetic Algorithm
Santucci et al. [77] designed an improved memetic algebraic differential evolution (iMADEB) algorithm that incorporated critical information about multidimensional two-way number partitioning problems (MDTWNPP). Three key design concepts such as a self-adaptive algebraic differential mutation scheme built on Lévy flight, novel non-redundant bit-string representation, and a smoother local search operator purposely designed for the MDTWNPP landscapes are evolved in iMADEB. Tang et al. [78] propose a memetic algorithm based on a combination of three methods: memetic diffusion component, memetic evolutionary component, and memetic learning component. The diversity of population is enhanced by using the memetic diffusion component. The exploitation task with the Lévy flight operator is accomplished by using the memetic evolutionary component. Yang et al. [196] developed a novel memetic algorithm with Lévy flight by exploring the principle of memetic computing and Lévy flight. An efficient local search strategy with Lévy flight is designed to enhance the search ability for short walking distance and occasional long jumps to be made by the particle. The lifetime of each particle is defined to determine whether a particle needs to be redistributed using the Lévy flight.
3.3.4. Lévy Flight Used in General Programming
Coelho et al. [197] proposed an improved genetic programming method based on Lévy flight, which estimates discrete polynomial nonlinear autoregressive with exogenous inputs (NARX). The contribution of Lévy flight is related to the tune of crossover and mutation probabilities. The experimental results show that the proposed method based on Lévy flight is available for model identification of a poppet valve.
3.4. Lévy flight Used in Neural Network
Lévy flight is not only used in evolutionary computation and swarm intelligence, but also widely used in neural networks. Some of the literature regarding Lévy flight applied in neural networks are shown in Table 4.
Alshmrany et al. [198] proposed a convolutional neural network-based Lévy flight distribution (CNN-LFD) algorithm to learn style prediction. The learning styles, namely active/reflective, sensing/intuitive, visual/verbal, and sequential/global based on the extracted features, are predicted by using the CNN-LFD algorithm. The experimental results show that the CNN-LFD algorithm has higher classification accuracy during the learning style prediction. Alweshah et al. [22] studied a hybridized method denoted with the firefly algorithm and simulated annealing. The randomness step inside the firefly algorithm is controlled by using the simulated annealing. The Lévy flight is used to explore the search space within the firefly algorithm, which improved the performance of the probabilistic neural network. Amirsadri et al. [199] developed a new algorithm combining a gradient-based and a metaheuristic algorithm into a train neural network, which eliminated the problem of becoming stuck in local optimum. The improved algorithm is combined with back propagation (BP) and Lévy flight to apply to the local search ability of the BP algorithm in a training neural network.
Bousmaha et al. [25] presented a new training method based on a hybrid PSO with multi-verse optimization and Lévy flight (PLMVO) that optimized the number of hidden neurons and connection weights simultaneously in feed forward neural networks (FFNN). Chidadala et al. [200] proposed a hybrid algorithm based on a convolutional neural network and the cuckoo search (CNN-CS). CNN-CS can replace the large scale of time-consuming machine learning techniques and complex training. The CNN is optimized by using Lévy flight in CNN-CS. Experimental results demonstrated that the CNN-CS improved the throughput and reduced the power consumption. He et al. [201] proposed a new artificial neural network (ANN) training algorithm named LGSO based on an improved group search optimizer algorithm (GSO) by replacing the Gaussian random walk with Lévy flight. The LGSO is applied to tune the parameters of three-layer feed-forward ANN, connection weights, and bias. The sunspot number forecasting problems and the Cleveland heart disease classification problems have been employed to assess the performance of the LGSO. The experimental results showed that LGSO has better convergence and generalization performance on the two real-world problems. He et al. [202] proposed an improved WOA by using an elite opposition-based learning SVM and Lévy flight, which is a multi-classification evaluation algorithm (LFEO-BWOA-SV M). Position information effectively is updated by using a Lévy flight strategy instead of a spiral trajectory strategy for multi-classification comprehensive decision making. The results showed that the convergence speed and optimization ability of the proposed method are obviously improved.
Jalali et al. [203] proposed an enhanced grasshopper optimization algorithm named EGOA to optimize the deep long short-term memory (LSTM) for neural network architecture. The Lévy flight and chaotic theory strategies are applied to make an efficient balance between the exploration and exploitation in the EGOA. The experimental results revealed that the LSTM achieved the best forecasting performance compared with other state-of-the-art forecasting algorithms. Khan et al. [204] proposed a new method based on a hybrid accelerated cuckoo particle swarm optimization (HACPSO) algorithm, which provided communication for looking for a better place having the best nest with greater survivability for cuckoo birds. The results demonstrated that the HACPSO algorithm performed better compared with other algorithms. Li et al. [205] proposed an improved bird swarm algorithm optimization least squares support vector machine (IBSA-LSSVM) model that predicts the remaining life of lithium–ion batteries. The Lévy flight is introduced into the bird swarm algorithm (IBSA) to avoid the IBSA getting into the local optimal solution.
4. Conclusions and Future Directions
This paper systematically summarized and studied Lévy flight-based metaheuristic algorithms. We searched through Google Scholar with the keyword “Lévy flight” and found papers related to metaheuristic algorithms. A total of 159 representative papers from 1 January 2006 to 20 March 2020 are selected for our survey from the various papers collected for this study. Through the summary analysis of these papers, we found that the development trend and space of Lévy flight-based metaheuristic algorithms is promising. A large number of researchers used Lévy flight to improve the intelligent optimization algorithms. Lévy flight has achieved good results in many metaheuristic algorithms and engineering applications. However, we still consider that some problems are worth studying during the next few years.
(1) The current Lévy flight-based metaheuristic algorithms have achieved significant optimization effects in various aspects, yet most researchers have only focused on the optimization effects of the Lévy flight-based metaheuristic algorithms. There is not sufficient explanation for the theoretical analysis of Lévy flight-based metaheuristic algorithms. Therefore, strengthening the theoretical analysis of Lévy flight-based metaheuristic algorithms and the mathematical model will remain a challenge in future research.
(2) Lévy flight is employed to solve unsolved optimization problems, especially multi-objective optimization problems need to be studied in more depth.
(3) Lévy flight can be combined with the learning metaheuristic algorithm method [206].
(4) Lévy flight-based intelligent optimization has a lower proportion of engineering applications than the others. This is undoubtedly a shortcoming of Lévy flight-based intelligent optimization. Therefore, expanding Lévy flight-based metaheuristic algorithms for more engineering applications is also an important challenge.
(5) Lévy flight-based metaheuristic algorithms have achieved some notable accomplishments for solving continuous and discrete optimization problems. Therefore, designing suitable optimization operators and expanding the application scope of Lévy flight in computer vision should be considered in future research [207,208].
(6) Lévy flight-based metaheuristic algorithms have a lower proportion of combining with machine learning methods than the others.
Author Contributions
Conceptualization, J.L.; research literature, H.L.; literature search, G.-G.W. and Q.A.; writing—original draft preparation, J.L.; writing—review and editing, H.L. and Q.D.; funding acquisition, G.-G.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Project of Wenzhou Key Laboratory Foundation under Grant 2021HZSY0071.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the anonymous reviewers and the editor for their careful reviews and constructive suggestions to help us improve the quality of this paper.
Conflicts of Interest
The authors declare that they have no conflict of interest.
References
- Huang, Z.; Fang, H.; Li, Q.; Li, Z.; Zhang, T.; Sang, N.; Li, Y. Optical remote sensing image enhancement with weak structure preservation via spatially adaptive gamma correction. Infrared Phys. Technol. 2018, 94, 38–47. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, L.; Zhang, Y.; Yu, Z.; Fang, H.; Zhang, T. Robust contact-point detection from pantograph-catenary infrared images by employing horizontal-vertical enhancement operator. Infrared Phys. Technol. 2019, 101, 146–155. [Google Scholar] [CrossRef]
- Wang, G.-G.; Tan, Y. Improving metaheuristic algorithms with information feedback models. IEEE Trans. Cybern. 2019, 49, 542–555. [Google Scholar] [CrossRef] [PubMed]
- Panteleev, A.V.; Kolessa, A.A. Optimal open-loop control of discrete deterministic systems by application of the perch school metaheuristic optimization algorithm. Algorithms 2022, 15, 157. [Google Scholar] [CrossRef]
- Wang, L.; Pan, Z.; Wang, J. A review of reinforcement learning based intelligent optimization for manufacturing scheduling. Complex Syst. Modeling Simul. 2021, 1, 257–270. [Google Scholar] [CrossRef]
- Gao, D.; Wang, G.-G.; Pedrycz, W. Solving fuzzy job-shop scheduling problem using de algorithm improved by a selection mechanism. IEEE Trans. Fuzzy Syst. 2020, 28, 3265–3275. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; El-Sehiemy, R.A.; Wang, G.-G. A novel parallel hurricane optimization algorithm for secure emission/economic load dispatch solution. Appl. Soft Comput. 2018, 63, 206–222. [Google Scholar] [CrossRef]
- Liu, G.; Deng, M. Parametric active contour based on sparse decomposition for multi-objects extraction. Signal Process. 2018, 148, 314–321. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Li, Z.; Zhang, T.; Sang, N.; Xiong, S. Unidirectional variation and deep cnn denoiser priors for simultaneously destriping and denoising optical remote sensing images. Int. J. Remote Sens. 2019, 40, 5737–5748. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Li, X.; Zhang, T.; Sang, N.; Hong, H. Joint analysis and weighted synthesis sparsity priors for simultaneous denoising and destriping optical remote sensing images. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6958–6982. [Google Scholar] [CrossRef]
- Huang, Z.; Zhu, Z.; An, Q.; Wang, Z.; Zhou, Q.; Zhang, T.; Alshomrani, A.S. Luminance learning for remotely sensed image enhancement guided by weighted least squares. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, Z.; Zhu, Z.; Zhang, Y.; Fang, H.; Shi, Y.; Zhang, T. Dlrp: Learning deep low-rank prior for remotely sensed image denoising. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Alweshah, M. Solving feature selection problems by combining mutation and crossover operations with the monarch butterfly optimization algorithm. Appl. Intell. 2021, 51, 4058–4081. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, X.-F.; Gong, D.-W. A return-cost-based binary firefly algorithm for feature selection. Inf. Sci. 2017, 418–419, 561–574. [Google Scholar] [CrossRef]
- Li, J.; Yang, Y.-H.; Lei, H.; Wang, G.-G. Solving logistics distribution center location with improved cuckoo search algorithm. Int. J. Comput. Intell. Syst. 2020, 14, 676–692. [Google Scholar] [CrossRef]
- Li, J.; Xiao, D.-d.; Lei, H.; Zhang, T.; Tian, T. Using cuckoo search algorithm with Q-learning and genetic operation to solve the problem of logistics distribution center location. Mathematics 2020, 8, 149. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Huang, L.; Li, Q.; Zhang, T.; Sang, N. Framelet regularization for uneven intensity correction of color images with illumination and reflectance estimation. Neurocomputing 2018, 314, 154–168. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Q.; Zhang, T.; Sang, N.; Hong, H. Iterative weighted sparse representation for x-ray cardiovascular angiogram image denoising over learned dictionary. IET Image Process. 2018, 12, 254–261. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Zhang, T.; Sang, N.; Hong, H. Progressive dual-domain filter for enhancing and denoising optical remote-sensing images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 759–763. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Y.; Li, Q.; Zhang, T.; Sang, N. Spatially adaptive denoising for x-ray cardiovascular angiogram images. Biomed. Signal Process. Control 2018, 40, 131–139. [Google Scholar] [CrossRef]
- An, Q.; Xi, J.; Jun, Q.; Rui, Z.; Yuan, J.; Wei, H. A robust fire detection model via convolution neural networks for intelligent robot vision sensing. Sensors 2022, 22, 2929. [Google Scholar] [CrossRef]
- Alweshah, M.; Abdullah, S. Hybridizing firefly algorithms with a probabilistic neural network for solving classification problems. Appl. Soft Comput. 2015, 35, 513–524. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; El-Sehiemy, R.A.; Deb, S.; Wang, G.-G. A novel fruit fly framework for multi-objective shape design of tubular linear synchronous motor. J. Supercomput. 2017, 73, 1235–1256. [Google Scholar] [CrossRef]
- Liu, G.; Zou, J. Level set evolution with sparsity constraint for object extraction. IET Image Process. 2018, 12, 1413–1422. [Google Scholar] [CrossRef]
- Bousmaha, R.; Hamou, R.M.; Amine, A. Automatic selection of hidden neurons and weights in neural networks for data classification using hybrid particle swarm optimization, multi-verse optimization based on Lévy flight. Evol. Intell. 2021, 15, 1675–1714. [Google Scholar] [CrossRef]
- Prabu, M.; Chelliah, B.J. Mango leaf disease identification and classification using a cnn architecture optimized by crossover-based levy flight distribution algorithm. Neural Comput. Appl. 2022, 34, 7311–7324. [Google Scholar] [CrossRef]
- Cui, Z.; Sun, B.; Wang, G.-G.; Xue, Y.; Chen, J. A novel oriented cuckoo search algorithm to improve dv-hop performance for cyber-physical systems. J. Parallel Distrib. Comput. 2017, 103, 42–52. [Google Scholar] [CrossRef]
- Banerjee, R.; De, S.; Dey, S. Wtaof-ilpb based feature learning and lfssoa-rbfnn based classification for facial micro-expression recognition. Wirel. Pers. Commun. 2021. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.-x.; Tian, S.-s.; Xia, J.-l. An improved cuckoo search algorithm with self-adaptive knowledge learning. Neural Comput. Appl. 2020, 32, 11967–11997. [Google Scholar] [CrossRef]
- Minocha, S.; Singh, B. A novel equilibrium optimizer based on Lévy flight and iterative cosine operator for engineering optimization problems. Expert Syst. 2022, 39, 12843. [Google Scholar] [CrossRef]
- Nautiyal, B.; Prakash, R.; Vimal, V.; Liang, G.; Chen, H. Improved salp swarm algorithm with mutation schemes for solving global optimization and engineering problems. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Tsipianitis, A.; Tsompanakis, Y. Improved cuckoo search algorithmic variants for constrained nonlinear optimization. Adv. Eng. Softw. 2020, 149, 102865. [Google Scholar] [CrossRef]
- Wang, G.-G.; Cai, X.; Cui, Z.; Min, G.; Chen, J. High performance computing for cyber physical social systems by using evolutionary multi-objective optimization algorithm. IEEE Trans. Emerg. Top. Comput. 2020, 8, 20–30. [Google Scholar] [CrossRef]
- Cai, X.; Geng, S.; Zhang, J.; Wu, D.; Cui, Z.; Zhang, W.; Chen, J. A sharding scheme-based many-objective optimization algorithm for enhancing security in blockchain-enabled industrial internet of things. IEEE Trans. Ind. Inform. 2021, 17, 7650–7658. [Google Scholar] [CrossRef]
- Cai, X.; Lan, Y.; Zhang, Z.; Wen, J.; Cui, Z.; Zhang, W.S. A many-objective optimization based federal deep generation model for enhancing data processing capability in iot. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Cui, Z.; Zhang, Z.; Hu, Z.; Geng, S.; Chen, J. A many-objective optimization based intelligent high performance data processing model for cyber-physical-social systems. IEEE Trans. Netw. Sci. Eng. 2021. [Google Scholar] [CrossRef]
- Cui, Z.; Zhao, P.; Hu, Z.; Cai, X.; Zhang, W.; Chen, J. An improved matrix factorization based model for many-objective optimization recommendation. Inf. Sci. 2021, 579, 1–14. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G.-G. Binary moth search algorithm for discounted {0-1} knapsack problem. IEEE Access 2018, 6, 10708–10719. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G.-G.; Wang, L. Solving randomized time-varying knapsack problems by a novel global firefly algorithm. Eng. Comput. 2018, 34, 621–635. [Google Scholar] [CrossRef]
- Aghaee, R.; Momeni, M.; Moallem, P. Semisupervised band selection from hyperspectral images using levy flight-based genetic algorithm. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley: New York, NY, USA, 1998. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Wang, G.-G.; Gandomi, A.H.; Yang, X.-S.; Alavi, A.H. A novel improved accelerated particle swarm optimization algorithm for global numerical optimization. Eng. Comput. 2014, 31, 1198–1220. [Google Scholar] [CrossRef]
- Sun, J.; Feng, B.; Xu, W. Particle swarm optimization with particles having quantum behavior. In Proceedings of the Congress on Evolutionary Computation (CEC 2004), Portland, OR, USA, 19–23 June 2004; pp. 325–331. [Google Scholar]
- Adewumi, A.O.; Arasomwan, M.A. On the performance of particle swarm optimisation with(out) some control parameters for global optimisation. Int. J. Bio-Inspired Comput. 2016, 8, 14–32. [Google Scholar] [CrossRef]
- Lu, X.-l.; He, G. Qpso algorithm based on Lévy flight and its application in fuzzy portfolio. Appl. Soft Comput. 2021, 99, 106894. [Google Scholar] [CrossRef]
- Bejarbaneh, E.Y.; Masoumnezhad, M.; Armaghani, D.J.; Binh Thai, P. Design of robust control based on linear matrix inequality and a novel hybrid pso search technique for autonomous underwater vehicle. Appl. Ocean Res. 2020, 101, 102231. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Xu, Z.; Unveren, A.; Acan, A. Probability collectives hybridised with differential evolution for global optimisation. Int. J. Bio-Inspired Comput. 2016, 8, 133–153. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Duan, H.; Liu, L.; Wang, H.; Shao, M. Path planning for uninhabited combat aerial vehicle using hybrid meta-heuristic de/bbo algorithm. Adv. Sci. Eng. Med. 2012, 4, 550–564. [Google Scholar] [CrossRef]
- Feng, X.; Muramatsu, H.; Katsura, S. Differential evolutionary algorithm with local search for the adaptive periodic-disturbance observer adjustment. IEEE Trans. Ind. Electron. 2021, 68, 12504–12512. [Google Scholar] [CrossRef]
- Zhong, X.; Cheng, P. An elite-guided hierarchical differential evolution algorithm. Appl. Intell. 2021, 51, 4962–4983. [Google Scholar] [CrossRef]
- Ates, A.; Akpamukcu, M. Modified monarch butterfly optimization with distribution functions and its application for 3 dof hover flight system. Neural Comput. Appl. 2022, 34, 3697–3722. [Google Scholar] [CrossRef]
- Kim, M.; Chae, J. Monarch butterfly optimization for facility layout design based on a single loop material handling path. Mathematics 2019, 7, 154. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.-G.; Deb, S.; Cui, Z. Monarch butterfly optimization. Neural Comput. Appl. 2019, 31, 1995–2014. [Google Scholar] [CrossRef] [Green Version]
- Yi, J.-H.; Lu, M.; Zhao, X.-J. Quantum inspired monarch butterfly optimization for ucav path planning navigation problem. Int. J. Bio-Inspired Comput. 2020, 15, 75–89. [Google Scholar] [CrossRef]
- Yonar, A.; Yapici Pehlivan, N. Artificial bee colony with Lévy flights for parameter estimation of 3-p weibull distribution. Iran. J. Sci. Technol. Trans. A Sci. 2020, 44, 851–864. [Google Scholar] [CrossRef]
- Zhou, J.; Yao, X. A hybrid approach combining modified artificial bee colony and cuckoo search algorithms for multi-objective cloud manufacturing service composition. Int. J. Prod. Res. 2017, 55, 4765–4784. [Google Scholar] [CrossRef]
- Wang, G.-G.; Deb, S.; Coelho, L.d.S. Elephant herding optimization. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI 2015), Bali, Indonesia, 7–9 December 2015; pp. 1–5. [Google Scholar]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Duan, H.; Wang, H.; Liu, L.; Shao, M. Hybridizing harmony search with biogeography based optimization for global numerical optimization. J. Comput. Theor. Nanosci. 2013, 10, 2318–2328. [Google Scholar] [CrossRef]
- Niknam, T.; Fard, A.K. Optimal energy management of smart renewable micro-grids in the reconfigurable systems using adaptive harmony search algorithm. Int. J. Bio-Inspired Comput. 2016, 8, 184–194. [Google Scholar] [CrossRef]
- Rezoug, A.; Boughaci, D. A self-adaptive harmony search combined with a stochastic local search for the 0–1 multidimensional knapsack problem. Int. J. Bio-Inspired Comput. 2016, 8, 234–239. [Google Scholar] [CrossRef]
- Dorigo, M.; Stutzle, T. Ant Colony Optimization; MIT Press: Cambridge, UK, 2004. [Google Scholar]
- Li, X.; Wang, J.; Yin, M. Enhancing the performance of cuckoo search algorithm using orthogonal learning method. Neural Comput. Appl. 2013, 24, 1233–1247. [Google Scholar] [CrossRef]
- Li, X.; Yin, M. Modified cuckoo search algorithm with self adaptive parameter method. Inf. Sci. 2015, 298, 80–97. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.-x.; Tian, S.-s.; Zou, J. Dynamic cuckoo search algorithm based on taguchi opposition-based search. Int. J. Bio-Inspired Comput. 2019, 13, 59–69. [Google Scholar] [CrossRef]
- Li, J.; Xiao, D.-d.; Zhang, T.; Liu, C.; Li, Y.-x.; Wang, G.-g. Multi-swarm cuckoo search algorithm with Q-learning model. Comput. J. 2021, 64, 108–131. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Li, Z.-Y.; Yi, J.-H.; Wang, G.-G. A new swarm intelligence approach for clustering based on krill herd with elitism strategy. Algorithms 2015, 8, 951–964. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gandomi, A.H.; Alavi, A.H.; Deb, S. A multi-stage krill herd algorithm for global numerical optimization. Int. J. Artif. Intell. Tools 2016, 25, 1550030. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gandomi, A.H.; Alavi, A.H. An effective krill herd algorithm with migration operator in biogeography-based optimization. Appl. Math. Model. 2014, 38, 2454–2462. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gandomi, A.H.; Alavi, A.H.; Gong, D. A comprehensive review of krill herd algorithm: Variants, hybrids and applications. Artif. Intell. Rev. 2019, 51, 119–148. [Google Scholar] [CrossRef]
- Wang, G.-G.; Deb, S.; Coelho, L.d.S. Earthworm optimization algorithm: A bio-inspired metaheuristic algorithm for global optimization problems. Int. J. Bio-Inspired Comput. 2018, 12, 1–22. [Google Scholar] [CrossRef]
- Peng, L.; Zhang, D. An adaptive Lévy flight firefly algorithm for multilevel image thresholding based on Rényi entropy. J. Supercomput. 2022, 78, 6875–6896. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.-G.; Burrage, K.; Tian, Y.-C.; Lawson, B.; Ding, Z. An improved firefly algorithm for global continuous optimization problems. Expert Syst. Appl. 2020, 149, 113340. [Google Scholar] [CrossRef]
- Santucci, V.; Baioletti, M.; Di Bari, G. An improved memetic algebraic differential evolution for solving the multidimensional two-way number partitioning problem. Expert Syst. Appl. 2021, 178, 114938. [Google Scholar] [CrossRef]
- Tang, D.; Liu, Z.; Yang, J.; Zhao, J. Memetic frog leaping algorithm for global optimization. Soft Comput. 2018, 23, 11077–11105. [Google Scholar] [CrossRef]
- Abu Khurmaa, R.; Aljarah, I.; Sharieh, A. An intelligent feature selection approach based on moth flame optimization for medical diagnosis. Neural Comput. Appl. 2021, 33, 7165–7204. [Google Scholar] [CrossRef]
- Liu, L.; Wang, A.; Sun, G.; Zheng, T.; Yu, C. An improved biogeography-based optimization approach for beam pattern optimizations of linear and circular antenna arrays. Int. J. Numer. Model. Electron. Netw. Devices Fields 2021, 34, e2910. [Google Scholar] [CrossRef]
- Shirani, M.R.; Safi-Esfahani, F. Bmda: Applying biogeography-based optimization algorithm and mexican hat wavelet to improve dragonfly algorithm. Soft Comput. 2020, 24, 15979–16004. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Karimian, H.; Xiao, G.; Huang, J. A novel framework for prediction of dam deformation based on extreme learning machine and Lévy flight bat algorithm. J. Hydroinform. 2021, 23, 935–949. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, F.; Liu, C.; Cheng, L.; Mao, Y. An improved wolf pack algorithm for optimization problems: Design and evaluation. PLoS ONE 2021, 16, e0254239. [Google Scholar] [CrossRef]
- Heidari, A.A.; Pahlavani, P. An efficient modified grey wolf optimizer with Lévy flight for optimization tasks. Appl. Soft Comput. 2017, 60, 115–134. [Google Scholar] [CrossRef]
- Chawla, M.; Duhan, M. Lévy flights in metaheuristics optimization algorithms—A review. Appl. Artif. Intell. 2018, 32, 802–821. [Google Scholar] [CrossRef]
- Zhou, Y.Q.; Ling, Y.; Luo, Q.F. Lévy flight trajectory-based whale optimization algorithm for engineering optimization. Eng. Comput. 2018, 35, 2406–2428. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S. Cuckoo search via Lévy flights. In Proceeding of the World Congress on Nature & Biologically Inspired Computing (NaBIC 2009), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.S.; Deb, S. Engineering optimisation by cuckoo search. Int. J. Math. Model. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S. Cuckoo search: Recent advances and applications. Neural Comput. Appl. 2013, 24, 169–174. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.-S.; Deb, S. Multiobjective cuckoo search for design optimization. Comput. Oper. Res. 2013, 40, 1616–1624. [Google Scholar] [CrossRef]
- Yang, B.; Miao, J.; Fan, Z.; Long, J.; Liu, X. Modified cuckoo search algorithm for the optimal placement of actuators problem. Appl. Soft Comput. 2018, 67, 48–60. [Google Scholar] [CrossRef]
- Yang, X.-S.; Deb, S.; Mishra, S.K. Multi-species cuckoo search algorithm for global optimization. Cogn. Comput. 2018, 10, 1085–1095. [Google Scholar] [CrossRef] [Green Version]
- Cao, Z.; Lin, C.; Zhou, M. A knowledge-based cuckoo search algorithm to schedule a flexible job shop with sequencing flexibility. IEEE Trans. Autom. Sci. Eng. 2021, 18, 56–69. [Google Scholar] [CrossRef]
- Cao, Z.; Lin, C.; Zhou, M.; Huang, R. Scheduling semiconductor testing facility by using cuckoo search algorithm with reinforcement learning and surrogate modeling. IEEE Trans. Autom. Sci. Eng. 2019, 16, 825–837. [Google Scholar] [CrossRef]
- Kim, M.; Chae, J. A monarch butterfly optimization for an unequal area facility layout problem. Soft Comput. 2021, 25, 14933–14953. [Google Scholar] [CrossRef]
- Kumar, V.; Naresh, R. Monarch butterfly optimization-based computational methodology for unit commitment problem. Electr. Power Compon. Syst. 2021, 48, 2181–2194. [Google Scholar] [CrossRef]
- Wang, G.-G. Moth search algorithm: A bio-inspired metaheuristic algorithm for global optimization problems. Memetic Comput. 2018, 10, 151–164. [Google Scholar] [CrossRef]
- Sun, S.; Su, Y.; Yin, C.; Jermsittiparsert, K. Optimal parameters estimation of pemfcs model using converged moth search algorithm. Energy Rep. 2020, 6, 1501–1509. [Google Scholar] [CrossRef]
- Strumberger, I.; Tuba, E.; Bacanin, N.; Beko, M.; Tuba, M. Wireless sensor network localization problem by hybridized moth search algorithm. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 316–321. [Google Scholar]
- Strumberger, I.; Sarac, M.; Markovic, D.; Bacanin, N. Moth search algorithm for drone placement problem. Int. J. Comput. 2018, 3, 75–80. [Google Scholar]
- Strumberger, I.; Bacanin, N. Modified moth search algorithm for global optimization problems. Int. J. Comput. 2018, 3, 44–48. [Google Scholar]
- Starnberger, I.; Tuba, E.; Bacanin, N.; Beko, M.; Tuba, M. Hybridized moth search algorithm for constrained optimization problems. In Proceedings of the 2018 International Young Engineers Forum (YEF-ECE), Costa da Caparica, Portugal, 4 May 2018; pp. 1–5. [Google Scholar]
- Singh, P.; Bishnoi, S.K.; Meena, N.K. Moth search optimization for optimal ders integration in conjunction to oltc tap operations in distribution systems. IEEE Syst. J. 2020, 14, 880–888. [Google Scholar] [CrossRef] [Green Version]
- Singaravel, G.; Gokuldhev, M. Local pollination-based moth search algorithm for task-scheduling heterogeneous cloud environment. Comput. J. 2020, 62, 382–395. [Google Scholar]
- Hussein, A.M.; Abd Elaziz, M.; Abdel Wahed, M.S.M.; Sillanpää, M. A new approach to predict the missing values of algae during water quality monitoring programs based on a hybrid moth search algorithm and the random vector functional link network. J. Hydrol. 2019, 575, 852–863. [Google Scholar] [CrossRef]
- Han, X.; Yue, L.; Dong, Y.; Xu, Q.; Xie, G.; Xu, X. Efficient hybrid algorithm based on moth search and fireworks algorithm for solving numerical and constrained engineering optimization problems. J. Supercomput. 2020, 76, 9404–9429. [Google Scholar] [CrossRef]
- Feng, Y.; Yi, J.-H.; Wang, G.-G. Enhanced moth search algorithm for the set-union knapsack problems. IEEE Access 2019, 7, 173774–173785. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, G.-G. A binary moth search algorithm based on self-learning for the multidimensional knapsack problems. Future Gener. Comput. Syst. 2021, 126, 48–64. [Google Scholar] [CrossRef]
- Feng, Y.; An, H.; Gao, X. The importance of transfer function in solving set-union knapsack problem based on discrete moth search algorithm. Mathematics 2019, 7, 17. [Google Scholar] [CrossRef] [Green Version]
- Fathy, A.; Elaziz, M.A.; Sayed, E.T.; Olabi, A.G.; Rezk, H. Optimal parameter identification of triple-junction photovoltaic panel based on enhanced moth search algorithm. Energy 2019, 188, 116025. [Google Scholar] [CrossRef]
- Elaziz, M.A.; Xiong, S.; Jayasena, K.P.N.; Li, L. Task scheduling in cloud computing based on hybrid moth search algorithm and differential evolution. Knowl.-Based Syst. 2019, 169, 39–52. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Talatahari, S.; Yang, X.-S.; Deb, S. Design optimization of truss structures using cuckoo search algorithm. Struct. Des. Tall Spec. Build. 2013, 22, 1330–1349. [Google Scholar] [CrossRef]
- Majumder, A.; Laha, D.; Suganthan, P.N. A hybrid cuckoo search algorithm in parallel batch processing machines with unequal job ready times. Comput. Ind. Eng. 2018, 124, 65–76. [Google Scholar] [CrossRef]
- Bhandari, A.K.; Maurya, S. Cuckoo search algorithm-based brightness preserving histogram scheme for low-contrast image enhancement. Soft Comput. 2019, 24, 1619–1645. [Google Scholar] [CrossRef]
- Jha, V.V.; Jajoo, K.S.; Tripathy, B.K.; Saleem Durai, M.A. An improved monarch butterfly optimization based multivariate fuzzy time series approach for forecasting gdp of india. Evol. Intell. 2022. [Google Scholar] [CrossRef]
- Nandhini, S.; Ashokkumar, K. Improved crossover based monarch butterfly optimization for tomato leaf disease classification using convolutional neural network. Multimed. Tools Appl. 2021, 80, 18583–18610. [Google Scholar] [CrossRef]
- Masoudi, B.; Aghdasi, H.S. An image segmentation method based on improved monarch butterfly optimization. Iran J. Comput. Sci. 2021, 5, 41–54. [Google Scholar] [CrossRef]
- Feng, Y.; Deb, S.; Wang, G.-G.; Alavi, A.H. Monarch butterfly optimization: A comprehensive review. Expert Syst. Appl. 2021, 168, 114418. [Google Scholar] [CrossRef]
- Dorgham, O.M.; Alweshah, M.; Ryalat, M.H.; Alshaer, J.; Khader, M.; Alkhalaileh, S. Monarch butterfly optimization algorithm for computed tomography image segmentation. Multimed. Tools Appl. 2021, 80, 30057–30090. [Google Scholar] [CrossRef]
- Bai, G.M.; Venkadesh, P. Taylor–monarch butterfly optimization-based support vector machine for acute lymphoblastic leukemia classification with blood smear microscopic images. J. Mech. Med. Biol. 2021, 21, 2150041. [Google Scholar] [CrossRef]
- Liu, X.; Wang, G.-G.; Wang, L. Lsfqpso: Quantum particle swarm optimization with optimal guided Lévy flight and straight flight for solving optimization problems. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Haklı, H.; Uğuz, H. A novel particle swarm optimization algorithm with Lévy flight. Appl. Soft Comput. 2014, 23, 333–345. [Google Scholar] [CrossRef]
- Jensi, R.; Jiji, G.W. An enhanced particle swarm optimization with Lévy flight for global optimization. Appl. Soft Comput. 2016, 43, 248–261. [Google Scholar] [CrossRef]
- Chegini, S.N.; Bagheri, A.; Najafi, F. Psoscalf: A new hybrid pso based on sine cosine algorithm and Lévy flight for solving optimization problems. Appl. Soft Comput. 2018, 73, 697–726. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, J.; Hu, Q.; Shao, L.; Chen, T. A hybrid dpso with Lévy flight for scheduling mimo radar tasks. Appl. Soft Comput. 2018, 71, 242–254. [Google Scholar] [CrossRef]
- Chen, L.; Li, Z.; Zhang, Y.; Zhang, Y. An improved quantum particle swarm photovoltaic multi-peak mppt method combined with Lévy flight. Energy Sci. Eng. 2020, 8, 3980–3994. [Google Scholar] [CrossRef]
- Habib, M.; Aljarah, I.; Faris, H. A modified multi-objective particle swarm optimizer-based Lévy flight: An approach toward intrusion detection in internet of things. Arab. J. Sci. Eng. 2020, 45, 6081–6108. [Google Scholar] [CrossRef]
- Motamarri, R.; Nagu, B. Gmppt by using pso based on Lévy flight for photovoltaic system under partial shading conditions. IET Renew. Power Gener. 2020, 14, 1143–1155. [Google Scholar] [CrossRef]
- Zhou, B.; Liao, X. Particle filter and Lévy flight-based decomposed multi-objective evolution hybridized particle swarm for flexible job shop greening scheduling with crane transportation. Appl. Soft Comput. 2020, 91, 106217. [Google Scholar] [CrossRef]
- Charin, C.; Ishak, D.; Mohd Zainuri, M.A.A.; Ismail, B.; Mohd Jamil, M.K. A hybrid of bio-inspired algorithm based on Lévy flight and particle swarm optimizations for photovoltaic system under partial shading conditions. Sol. Energy 2021, 217, 1–14. [Google Scholar] [CrossRef]
- Dash, D.R.; Dash, P.K.; Bisoi, R. Short term solar power forecasting using hybrid minimum variance expanded rvfln and sine-cosine Lévy flight pso algorithm. Renew. Energy 2021, 174, 513–537. [Google Scholar] [CrossRef]
- Kalakanti, A.K.; Rao, S. A hybrid cooperative method with Lévy flights for electric vehicle charge scheduling. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Yang, M.; Li, J.; Li, J.; Yuan, X.; Xu, J. Reconfiguration strategy for dc distribution network fault recovery based on hybrid particle swarm optimization. Energies 2021, 14, 7145. [Google Scholar] [CrossRef]
- Chegini, S.N.; Amini, P.; Ahmadi, B.; Bagheri, A.; Amirmostofian, I. Intelligent bearing fault diagnosis using swarm decomposition method and new hybrid particle swarm optimization algorithm. Soft Comput. 2022, 26, 1475–1497. [Google Scholar] [CrossRef]
- Mukherjee, D.; Mallick, S.; Rajan, A. A levy flight motivated meta-heuristic approach for enhancing maximum loadability limit in practical power system. Appl. Soft Comput. 2022, 114, 108146. [Google Scholar] [CrossRef]
- Boudjemaa, R.; Oliva, D.; Ouaar, F. Fractional Lévy flight bat algorithm for global optimisation. Int. J. Bio-Inspired Comput. 2020, 15, 100–112. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Z.; Si, L.; Tong, K.; Tan, C. A novel path planning method of mobile robots based on an improved bat algorithm. Proc. Inst. Mech. Eng. Part C-J. Mech. Eng. Sci. 2021, 235, 3071–3086. [Google Scholar] [CrossRef]
- Li, Y.; Li, X.; Liu, J.; Ruan, X. An improved bat algorithm based on lévy flights and adjustment factors. Symmetry 2019, 11, 925. [Google Scholar] [CrossRef] [Green Version]
- Hajizadeh, N.; Javidan, R.; Shamsinejad, P.; Akbari, R. Node deployment in wireless sensor networks using the new multi-objective Lévy flight bee algorithm. IET Wirel. Sens. Syst. 2020, 10, 78–87. [Google Scholar] [CrossRef]
- Saji, Y.; Barkatou, M. A discrete bat algorithm based on Lévy flights for euclidean traveling salesman problem. Expert Syst. Appl. 2021, 172, 114639. [Google Scholar] [CrossRef]
- Ghafarzadeh, H.; Bouyer, A. An efficient hybrid clustering method using an artificial bee colony algorithm and mantegna Lévy distribution. Int. J. Artif. Intell. Tools 2016, 25, 1550034. [Google Scholar] [CrossRef]
- Aydoğdu, İ.; Akın, A.; Saka, M.P. Design optimization of real world steel space frames using artificial bee colony algorithm with levy flight distribution. Adv. Eng. Softw. 2016, 92, 1–14. [Google Scholar] [CrossRef]
- Chen, M. Improved artificial bee colony algorithm based on escaped foraging strategy. J. Chin. Inst. Eng. 2019, 42, 516–524. [Google Scholar] [CrossRef]
- Dong, C.; Xiong, Z.; Liu, X.; Ye, Y.; Yang, Y.; Guo, W. Dual-search artificial bee colony algorithm for engineering optimization. IEEE Access 2019, 7, 24571–24584. [Google Scholar] [CrossRef]
- Jadon, S.S.; Bansal, J.C.; Tiwari, R. Escalated convergent artificial bee colony. J. Exp. Theor. Artif. Intell. 2015, 28, 181–200. [Google Scholar] [CrossRef]
- Liu, F.; Sun, Y.; Wang, G.-g.; Wu, T. An artificial bee colony algorithm based on dynamic penalty and Lévy flight for constrained optimization problems. Arab. J. Sci. Eng. 2018, 43, 7189–7208. [Google Scholar] [CrossRef]
- Panda, S. Performance improvement of optical cdma networks with stochastic artificial bee colony optimization technique. Opt. Fiber Technol. 2018, 42, 140–150. [Google Scholar] [CrossRef]
- Rambabu, B.; Venugopal Reddy, A.; Janakiraman, S. Hybrid artificial bee colony and monarchy butterfly optimization algorithm (HABC-MBOA)-based cluster head selection for wsns. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 1895–1905. [Google Scholar] [CrossRef]
- Shan, H.; Yasuda, T.; Ohkura, K. A self adaptive hybrid enhanced artificial bee colony algorithm for continuous optimization problems. Biosystems 2015, 132–133, 43–53. [Google Scholar] [CrossRef] [PubMed]
- Sharma, H.; Bansal, J.C.; Arya, K.V. Opposition based Lévy flight artificial bee colony. Memetic Comput. 2012, 5, 2652–2670. [Google Scholar] [CrossRef]
- Sharma, H.; Bansal, J.C.; Arya, K.V.; Yang, X.-S. Lévy flight artificial bee colony algorithm. Int. J. Syst. Sci. 2015, 47, 1–19. [Google Scholar] [CrossRef]
- Yahya, M.; Saka, M.P. Construction site layout planning using multi-objective artificial bee colony algorithm with Lévy flights. Autom. Constr. 2014, 38, 14–29. [Google Scholar] [CrossRef]
- Zhou, J.; Yao, X. Multi-objective hybrid artificial bee colony algorithm enhanced with Lévy flight and self-adaption for cloud manufacturing service composition. Appl. Intell. 2017, 47, 721–742. [Google Scholar] [CrossRef]
- Abd Elaziz, M.; Lu, S.; He, S. A multi-leader whale optimization algorithm for global optimization and image segmentation. Expert Syst. Appl. 2021, 175, 114841. [Google Scholar] [CrossRef]
- Deepa, R.; Venkataraman, R. Enhancing whale optimization algorithm with Lévy flight for coverage optimization in wireless sensor networks. Comput. Electr. Eng. 2021, 94, 107359. [Google Scholar] [CrossRef]
- Lai, V.; Huang, Y.F.; Koo, C.H.; Ahmed, A.N.; El-Shafie, A. Optimization of reservoir operation at klang gate dam utilizing a whale optimization algorithm and a Lévy flight and distribution enhancement technique. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1682–1702. [Google Scholar] [CrossRef]
- Liu, J.; Shi, J.; Hao, F.; Dai, M. A novel enhanced global exploration whale optimization algorithm based on Lévy flights and judgment mechanism for global continuous optimization problems. Eng. Comput. 2022. [Google Scholar] [CrossRef]
- Liu, M.; Yao, X.; Li, Y. Hybrid whale optimization algorithm enhanced with Lévy flight and differential evolution for job shop scheduling problems. Appl. Soft Comput. 2020, 87, 105954. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Tang, J. Modified whale optimization algorithm for underwater image matching in a UUV vision system. Multimed. Tools Appl. 2021, 80, 187–213. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Zeng, J.; Tang, J. Nature-inspired approach: An enhanced whale optimization algorithm for global optimization. Math. Comput. Simul. 2021, 185, 17–46. [Google Scholar] [CrossRef]
- Bandopadhyay, J.; Roy, P.K. Application of hybrid multi-objective moth flame optimization technique for optimal performance of hybrid micro-grid system. Appl. Soft Comput. 2020, 95, 106487. [Google Scholar] [CrossRef]
- Khurma, R.A.; Aljarah, I.; Sharieh, A. A simultaneous moth flame optimizer feature selection approach based on Lévy flight and selection operators for medical diagnosis. Arab. J. Sci. Eng. 2021, 46, 8415–8440. [Google Scholar] [CrossRef]
- Ni, Y.; Xu, J.; Zhu, C.; Pei, L. Accurate residual capacity estimation of retired lifepo4 batteries based on mechanism and data-driven model. Appl. Energy 2022, 305, 117922. [Google Scholar] [CrossRef]
- Rahman, H.F.; Janardhanan, M.N.; Chuen, L.P.; Ponnambalam, S.G. Flowshop scheduling with sequence dependent setup times and batch delivery in supply chain. Comput. Ind. Eng. 2021, 158, 107378. [Google Scholar] [CrossRef]
- Suja, K.R. Mitigation of power quality issues in smart grid using Lévy flight based moth flame optimization algorithm. Journa Ambient Intell. Humaniz. Comput. 2021, 12, 9209–9228. [Google Scholar] [CrossRef]
- Ren, H.; Li, J.; Chen, H.; Li, C. Adaptive Lévy-assisted salp swarm algorithm: Analysis and optimization case studies. Mathema Comput. Simul. 2021, 181, 380–409. [Google Scholar] [CrossRef]
- Nasri, D.; Mokeddem, D.; Bourouba, B.; Bosche, J. A novel Lévy flight trajectory-based salp swarm algorithm for photovoltaic parameters estimation. J. Inf. Optim. Sci. 2021, 42, 1841–1867. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.S. Improved salp swarm algorithm based on Lévy flight and sine cosine operator. IEEE Access 2020, 8, 99740–99771. [Google Scholar] [CrossRef]
- Yang, X.-S. Firefly algorithm, levy flights and global optimization. In Research and Development in Intelligent Systems xxvi; Bramer, M., Ellis, R., Petridis, M., Eds.; Springer: London, UK, 2010; pp. 209–218. [Google Scholar]
- Singh, H.; Singh, B.; Kaur, M. An improved elephant herding optimization for global optimization problems. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Wang, H.-J.; Jin, T.; Wang, H.; Su, D. Application of ieho-bp neural network in forecasting building cooling and heating load. Energy Rep. 2022, 8, 455–465. [Google Scholar] [CrossRef]
- Xu, H.; Cao, Q.; Fang, C.; Fu, Y.; Su, J.; Wei, S.; Bykovyy, P. In Application of elephant herd optimization algorithm based on levy flight strategy in intrusion detection. In Proceedings of the 2018 IEEE 4th International Symposium on Wireless Systems within the International Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Lviv, Ukraine, 20–21 September 2018; pp. 16–20. [Google Scholar]
- Li, X.; Gu, J.; Sun, X.; Li, J.; Tang, S. Parameter identification of robot manipulators with unknown payloads using an improved chaotic sparrow search algorithm. Appl. Intell. 2022, 52, 10341–10351. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Wang, Z.; Ma, C.; Song, Z. A vmd-cissa-lssvm based electricity load forecasting model. Mathematics 2022, 10, 28. [Google Scholar] [CrossRef]
- Wang, G.; Guo, L.; Gandomi, A.H.; Cao, L.; Alavi, A.H.; Duan, H.; Li, J. Lévy-flight krill herd algorithm. Math. Probl. Eng. 2013, 2013, 682073. [Google Scholar] [CrossRef]
- Guo, L.; Wang, G.-G.; Gandomi, A.H.; Alavi, A.H.; Duan, H. A new improved krill herd algorithm for global numerical optimization. Neurocomputing 2014, 138, 392–402. [Google Scholar] [CrossRef]
- Chen, Y.; Xi, J.; Wang, H.; Liu, X. Grey wolf optimization algorithm based on dynamically adjusting inertial weight and levy flight strategy. Evol. Intell. 2022. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. Enhanced leadership-inspired grey wolf optimizer for global optimization problems. Engingeering Comput. 2020, 36, 1777–1800. [Google Scholar] [CrossRef]
- Hu, J.; Chen, H.; Heidari, A.A.; Wang, M.; Zhang, X.; Chen, Y.; Pan, Z. Orthogonal learning covariance matrix for defects of grey wolf optimizer: Insights, balance, diversity, and feature selection. Knowl.-Based Syst. 2021, 213, 106684. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Zhou, M. Dimensional learning strategy-based grey wolf optimizer for solving the global optimization problem. Comput. Intell. Neurosci. 2022, 2022, 3603607. [Google Scholar] [CrossRef]
- Zhou, B.; Lei, Y. Bi-objective grey wolf optimization algorithm combined Lévy flight mechanism for the fmc green scheduling problem. Appl. Soft Comput. 2021, 111, 107717. [Google Scholar] [CrossRef]
- Goyal, K.K.; Sharma, N.; Gupta, R.D.; Gupta, S.; Rani, D.; Kumar, D.; Sharma, V.S. Measurement of performance characteristics of wedm while processing az31 Mg-alloy using Lévy flight mogwo for orthopedic application. Int. J. Adv. Manuf. Technol. 2022, 119, 7175–7197. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, Z.; Luan, S.; Li, X. A hybrid max-min ant system by levy flight and opposition-based learning. Engingeering Intern. J. Pattern Recognit. Artif. Intell. 2021, 35, 2151013. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, B. A novel ant colony optimization algorithm with levy flight. IEEE Access 2020, 8, 67205–67213. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, B.; Li, H. Improving ant colony optimization algorithm with epsilon greedy and Lévy flight. Complex Intell. Syst. 2021, 7, 1711–1722. [Google Scholar] [CrossRef] [Green Version]
- Tarkhaneh, O.; Shen, H. Training of feedforward neural networks for data classification using hybrid particle swarm optimization, mantegna Lévy flight and neighborhood search. Heliyon 2019, 5, e01275. [Google Scholar] [CrossRef] [Green Version]
- Fileccia Scimemi, G.; Turetta, T.; Celauro, C. Backcalculation of airport pavement moduli and thickness using the Lévy ant colony optimization algorithm. Constr. Build. Mater. 2016, 119, 288–295. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, Y.; Zhang, S.; Luo, Y.; Zhang, L. Ant colony optimization for cuckoo search algorithm for permutation flow shop scheduling problem. Syst. Sci. Control Eng. 2018, 7, 20–27. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, H.; Cao, Y.; Liu, Q.; Shen, Z.; Wang, J.; Hu, M. A hybrid ant colony and cuckoo search algorithm for route optimization of heating engineering. Energies 2018, 11, 2675. [Google Scholar] [CrossRef] [Green Version]
- Coelho, L.d.S.; Bora, T.C.; Mariani, V.C. Differential evolution based on truncated Lévy-type flights and population diversity measure to solve economic load dispatch problems. Int. J. Electr. Power Energy Syst. 2014, 57, 178–188. [Google Scholar] [CrossRef]
- Suresh, S.; Lal, S. Modified differential evolution algorithm for contrast and brightness enhancement of satellite images. Appl. Soft Comput. 2017, 61, 622–641. [Google Scholar] [CrossRef]
- Tarkhaneh, O.; Moser, I. An improved differential evolution algorithm using archimedean spiral and neighborhood search based mutation approach for cluster analysis. Future Gener. Comput. Syst. 2019, 101, 921–939. [Google Scholar] [CrossRef]
- Tarkhaneh, O.; Shen, H. An adaptive differential evolution algorithm to optimal multi-level thresholding for MRI brain image segmentation. Expert Syst. Appl. 2019, 138, 112820. [Google Scholar] [CrossRef]
- Zhao, F.; Xue, F.; Zhang, Y.; Ma, W.; Zhang, C.; Song, H. A hybrid algorithm based on self-adaptive gravitational search algorithm and differential evolution. Expert Syst. Appl. 2018, 113, 515–530. [Google Scholar] [CrossRef]
- Zhang, J.-H.; Li, A.-P.; Liu, X.-M. Hybrid genetic algorithm for a type-ii robust mixed-model assembly line balancing problem with interval task times. Adv. Manuf. 2019, 7, 117–132. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Cai, Y.; Tang, D.; Chen, W.; Hu, L. Memetic quantum optimization algorithm with Lévy flight for high dimension function optimization. Appl. Intell. 2022. [Google Scholar] [CrossRef]
- Coelho, L.d.S.; Bora, T.C.; Klein, C.E. A genetic programming approach based on Lévy flight applied to nonlinear identification of a poppet valve. Appl. Math. Model. 2014, 38, 1729–1736. [Google Scholar] [CrossRef]
- Alshmrany, S. Adaptive learning style prediction in e-learning environment using Lévy flight distribution based cnn model. Clust. Comput.-J. Netw. Softw. Tools Appl. 2022, 25, 523–536. [Google Scholar] [CrossRef]
- Amirsadri, S.; Mousavirad, S.J.; Ebrahimpour-Komleh, H. A Lévy flight-based grey wolf optimizer combined with back-propagation algorithm for neural network training. Neural Comput. Appl. 2018, 30, 3707–3720. [Google Scholar] [CrossRef]
- Chidadala, J.; Ramanaiah, K.V.; Babulu, K. Design of convolutional neural network with cuckoo search algorithm for super-resolution uhd systems on fpga. J. Circuits Syst. Comput. 2021, 30, 2150155. [Google Scholar] [CrossRef]
- He, S. Training artificial neural networks using Lévy group search optimizer. J. Mult.-Valued Log. Soft Comput. 2010, 16, 527–545. [Google Scholar]
- He, X.; Zhang, G.; Chen, Y.; Yang, S. Multi-class algorithm of woa-svm using Lévy flight and elite opposition-based learning. Appl. Res. Comput. 2021, 38, 3640–3645. [Google Scholar]
- Jalali, S.M.J.; Ahmadian, S.; Khodayar, M.; Khosravi, A.; Ghasemi, V.; Shafie-khah, M.; Nahavandi, S.; Catalao, J.P.S. Towards novel deep neuroevolution models: Chaotic Lévy grasshopper optimization for short-term wind speed forecasting. Eng. Comput. 2021. [Google Scholar] [CrossRef]
- Khan, A.; Shah, R.; Imran, M.; Khan, A.; Bangash, J.I.; Shah, K. An alternative approach to neural network training based on hybrid bio meta-heuristic algorithm. J. Ambient Intell. Humaniz. Comput. 2019, 10, 3821–3830. [Google Scholar] [CrossRef]
- Li, L.-L.; Liu, Z.-F.; Tseng, M.-L.; Chiu, A.S.F. Enhancing the lithium-ion battery life predictability using a hybrid method. Appl. Soft Comput. 2019, 74, 110–121. [Google Scholar] [CrossRef]
- Li, W.; Wang, G.-G. Elephant herding optimization using dynamic topology and biogeography-based optimization based on learning for numerical optimization. Eng. Comput. 2022, 38, 1585–1613. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, L.; An, Q.; Zhou, Q.; Hong, H. Learning a contrast enhancer for intensity correction of remotely sensed images. IEEE Signal Process. Lett. 2022, 29, 394–398. [Google Scholar] [CrossRef]
- Huang, Z.; Li, X.; Wang, L.; Fang, H.; Ma, L.; Shi, Y.; Hong, H. Spatially adaptive multi-scale image enhancement based on nonsubsampled contourlet transform. Infrared Phys. Technol. 2022, 121, 104014. [Google Scholar] [CrossRef]
Figure 1.
Related Lévy flight publications since 1981.

Figure 2.
Related Lévy flight publications account covering different research fields.

Figure 3.
The proportion of related Lévy flight publications in different research fields.

Figure 4.
Related metaheuristics algorithms combining Lévy flight publications since 1981.

Figure 5.
Classification proportions of Lévy flight methods used in different metaheuristic algorithms.
Figure 5.
Classification proportions of Lévy flight methods used in different metaheuristic algorithms.

Figure 6.
The movement trajectory of Lévy flight for 50, 100, and 1000 times in two-dimensional space, respectively.
Figure 6.
The movement trajectory of Lévy flight for 50, 100, and 1000 times in two-dimensional space, respectively.

Figure 7.
The classification proportions of metaheuristic algorithms with a Lévy flight operator.

Figure 8.
Classification proportions of Lévy flight used in swarm intelligence.

Figure 9.
Classification proportions of evolutionary computation with Lévy flight.


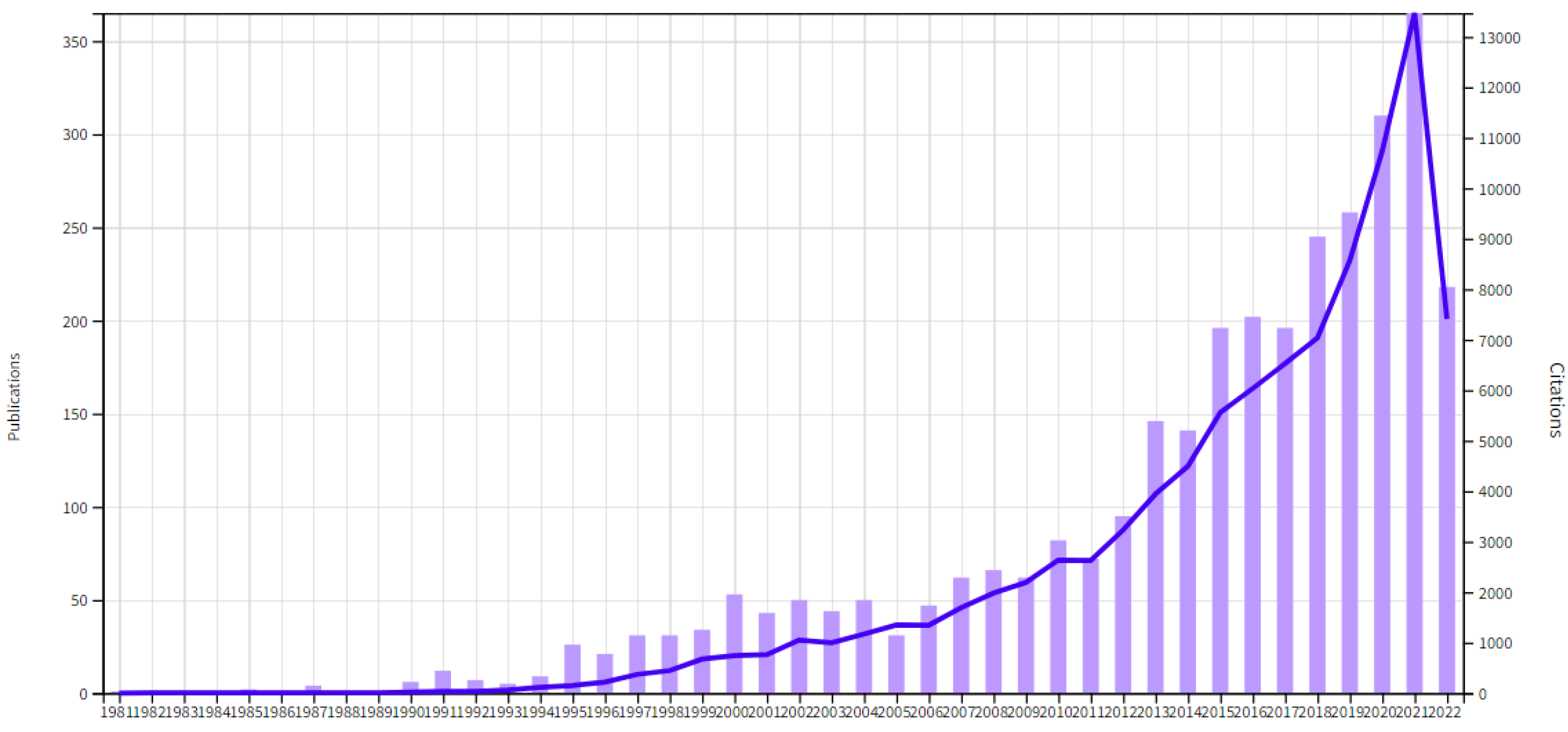{kind=link}
{kind=link}
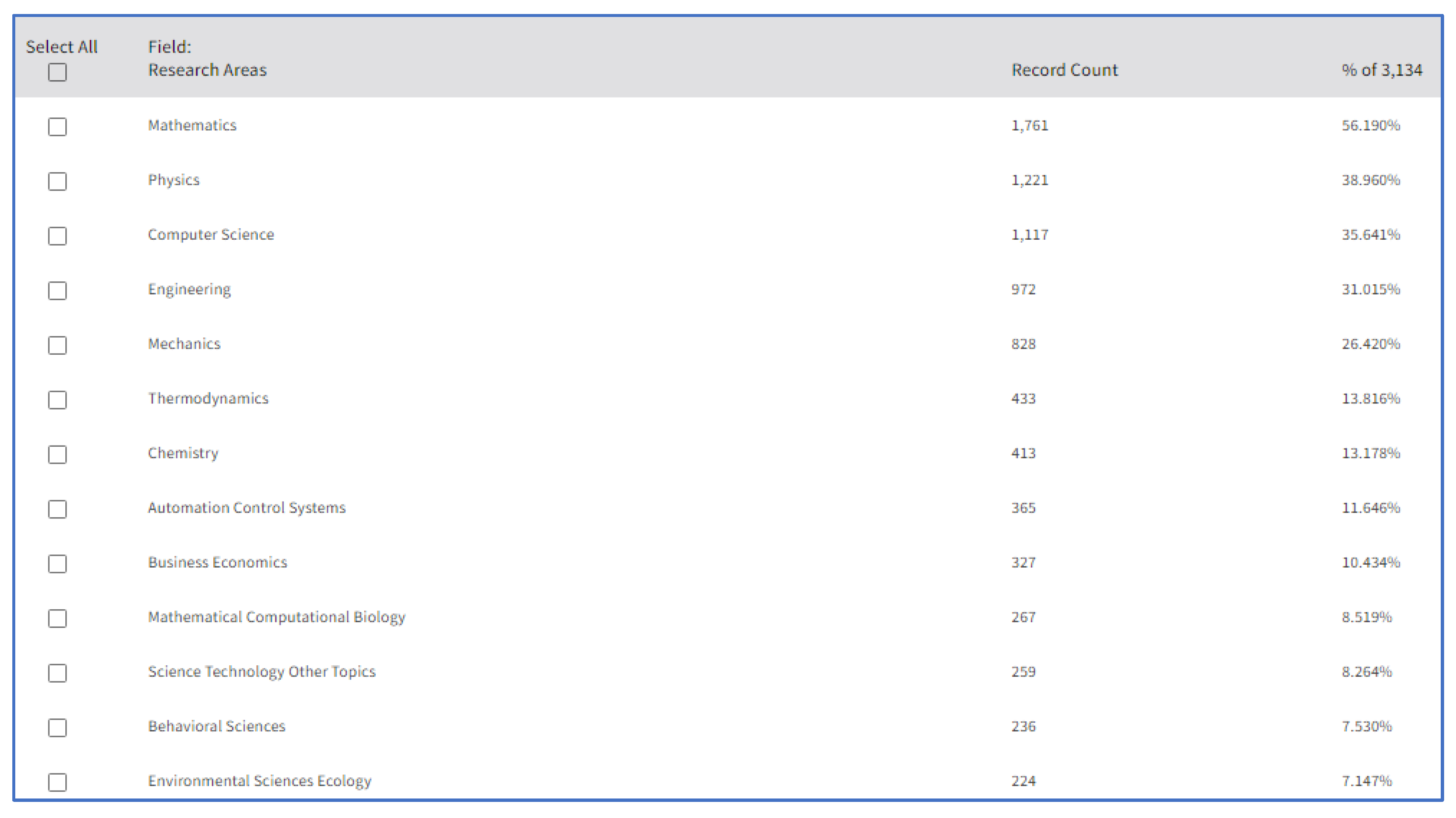{kind=link}
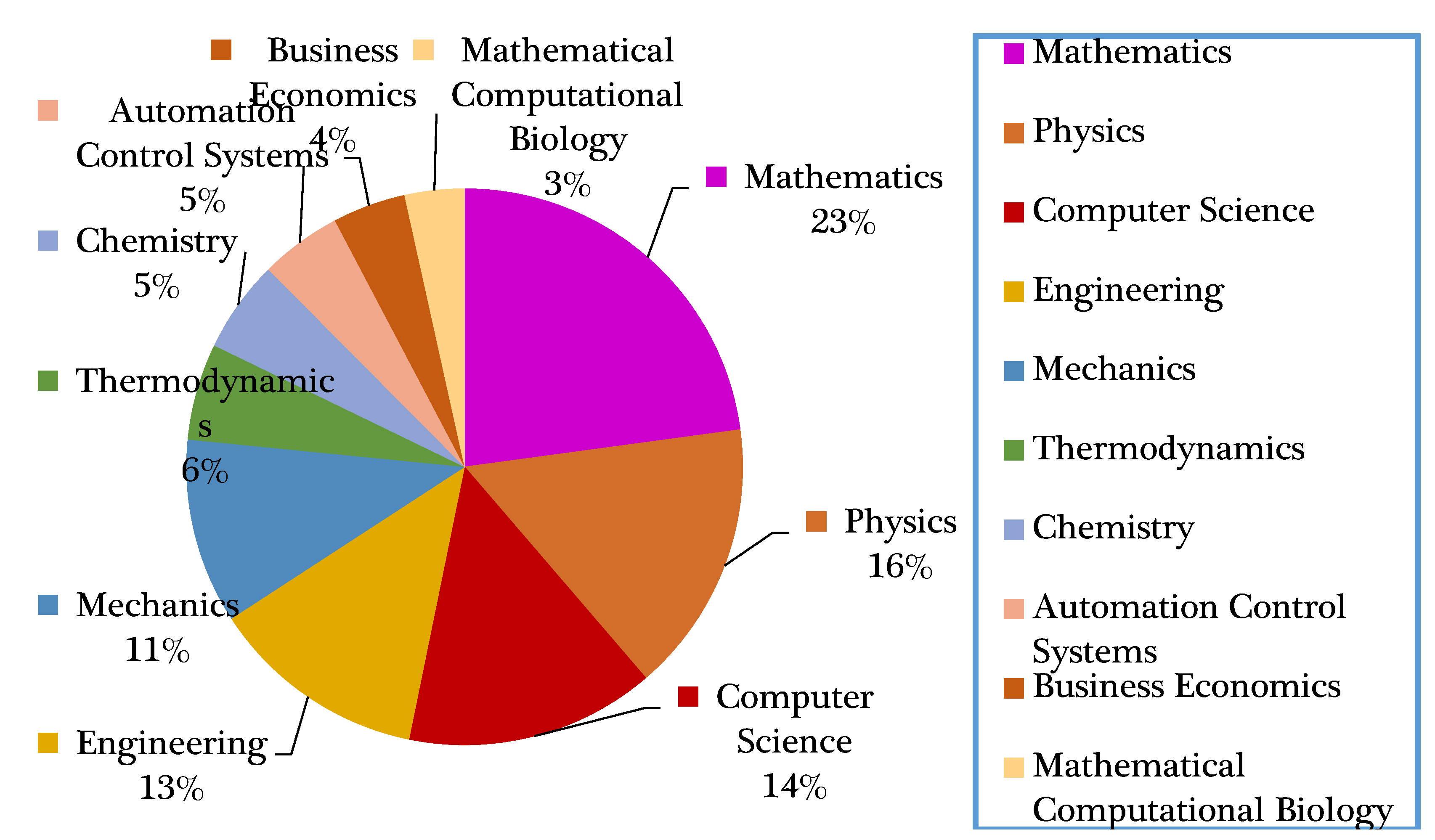{kind=link}
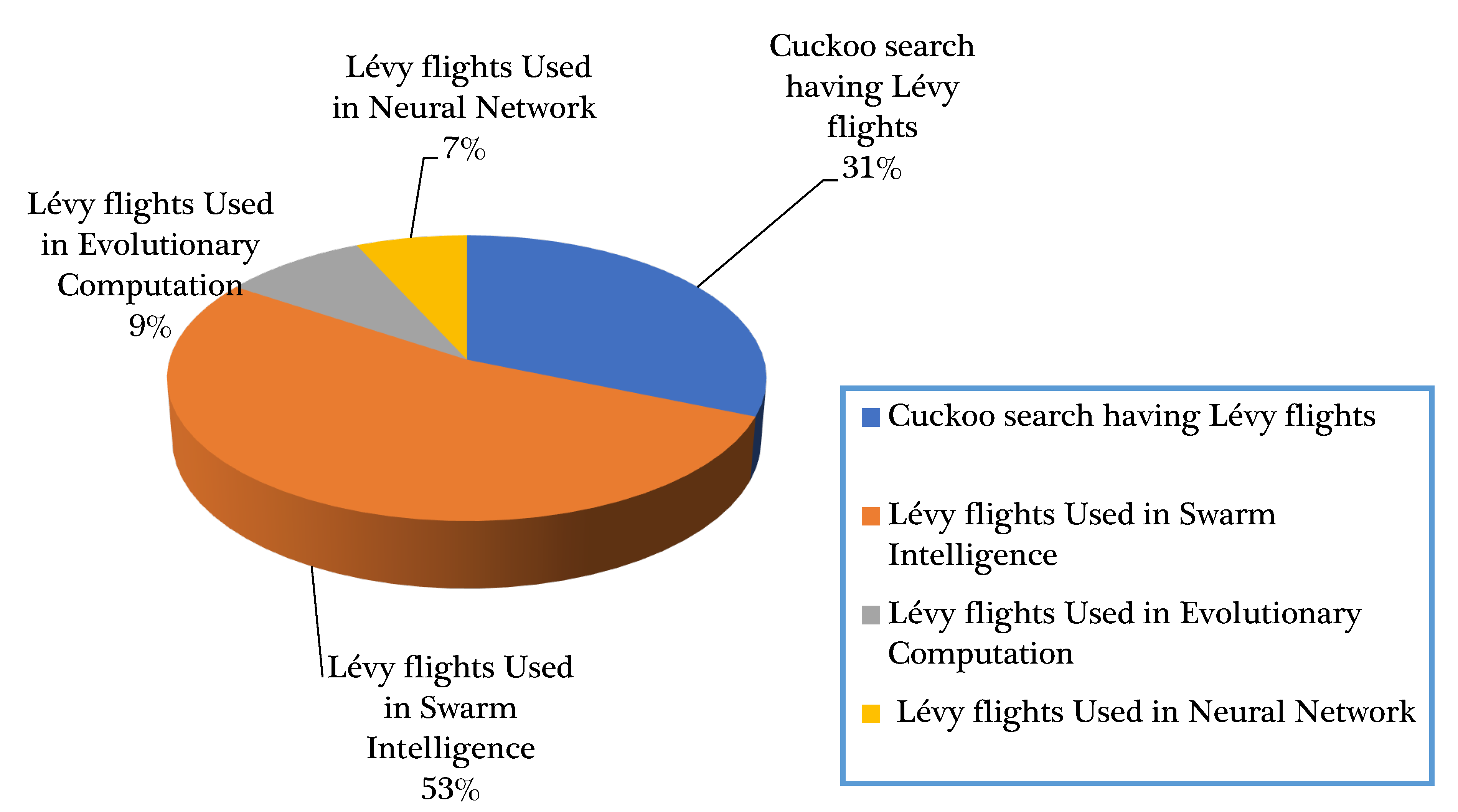{kind=link}
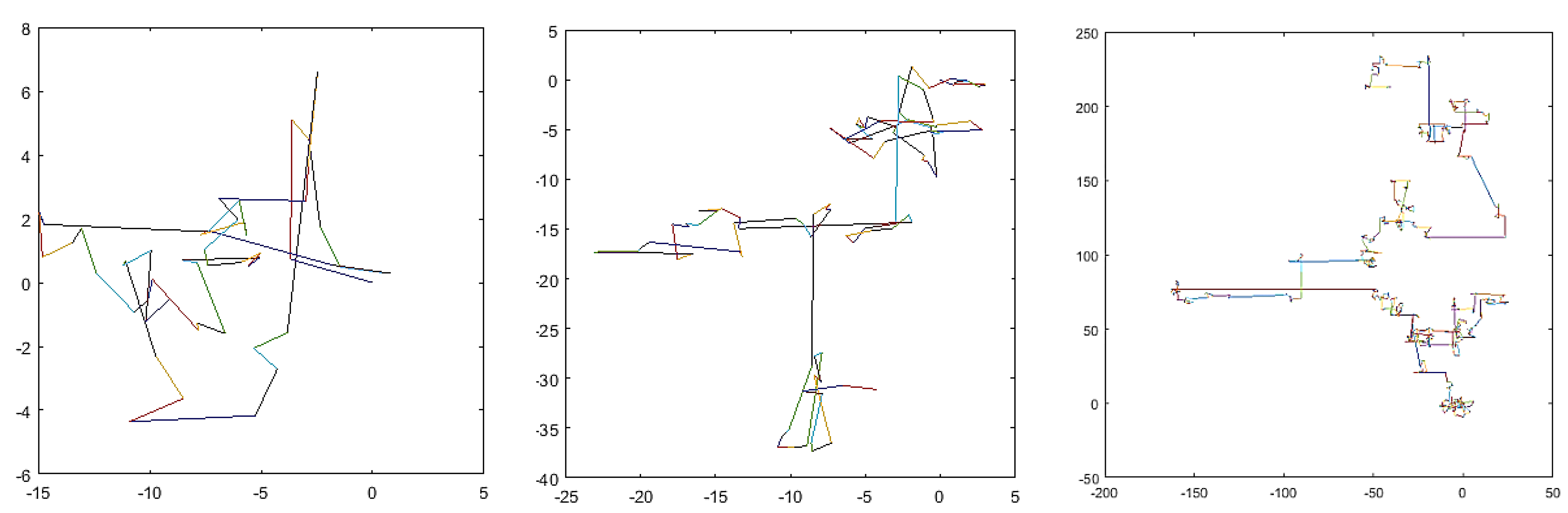{kind=link}
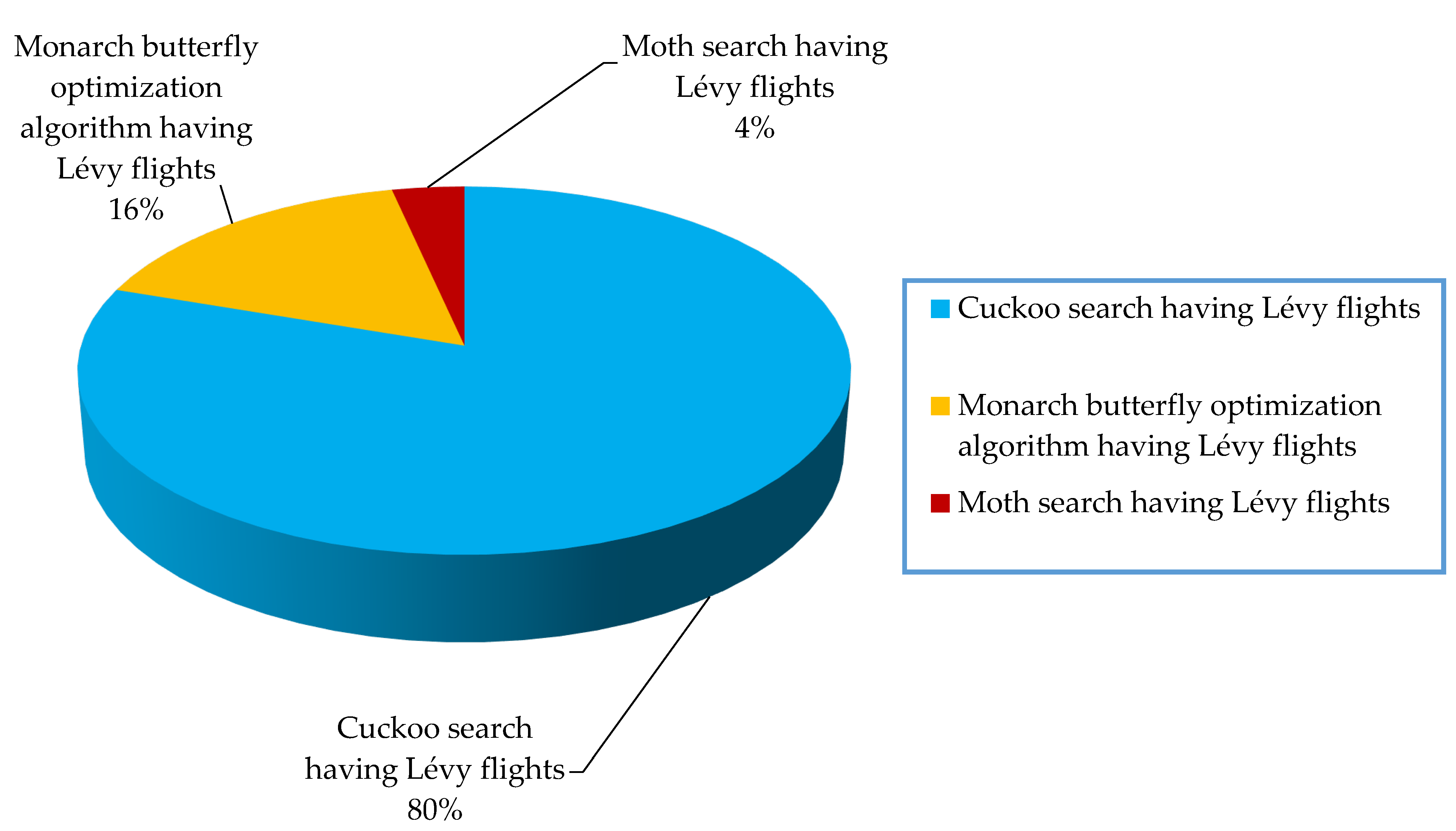{kind=link}
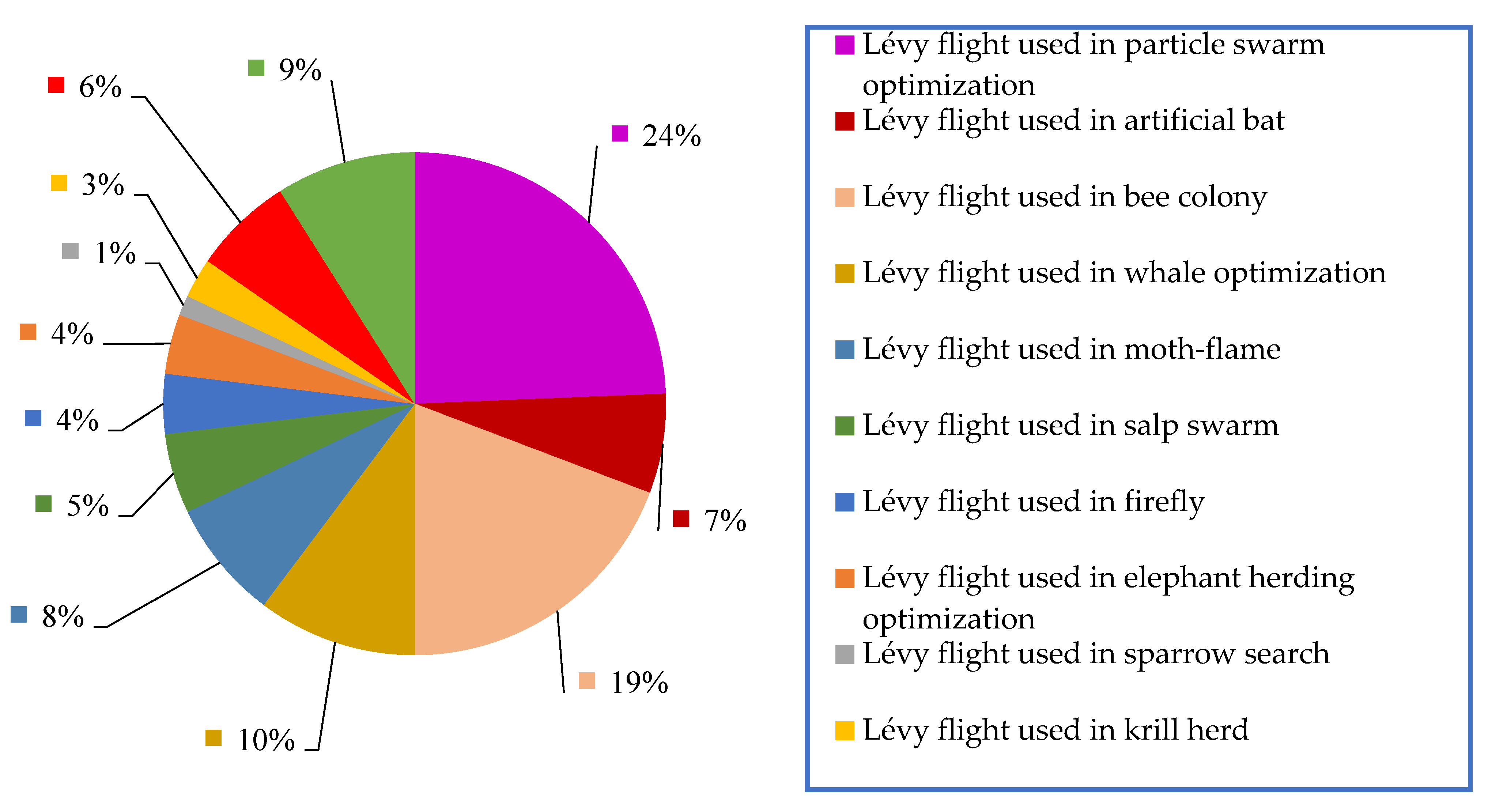{kind=link}
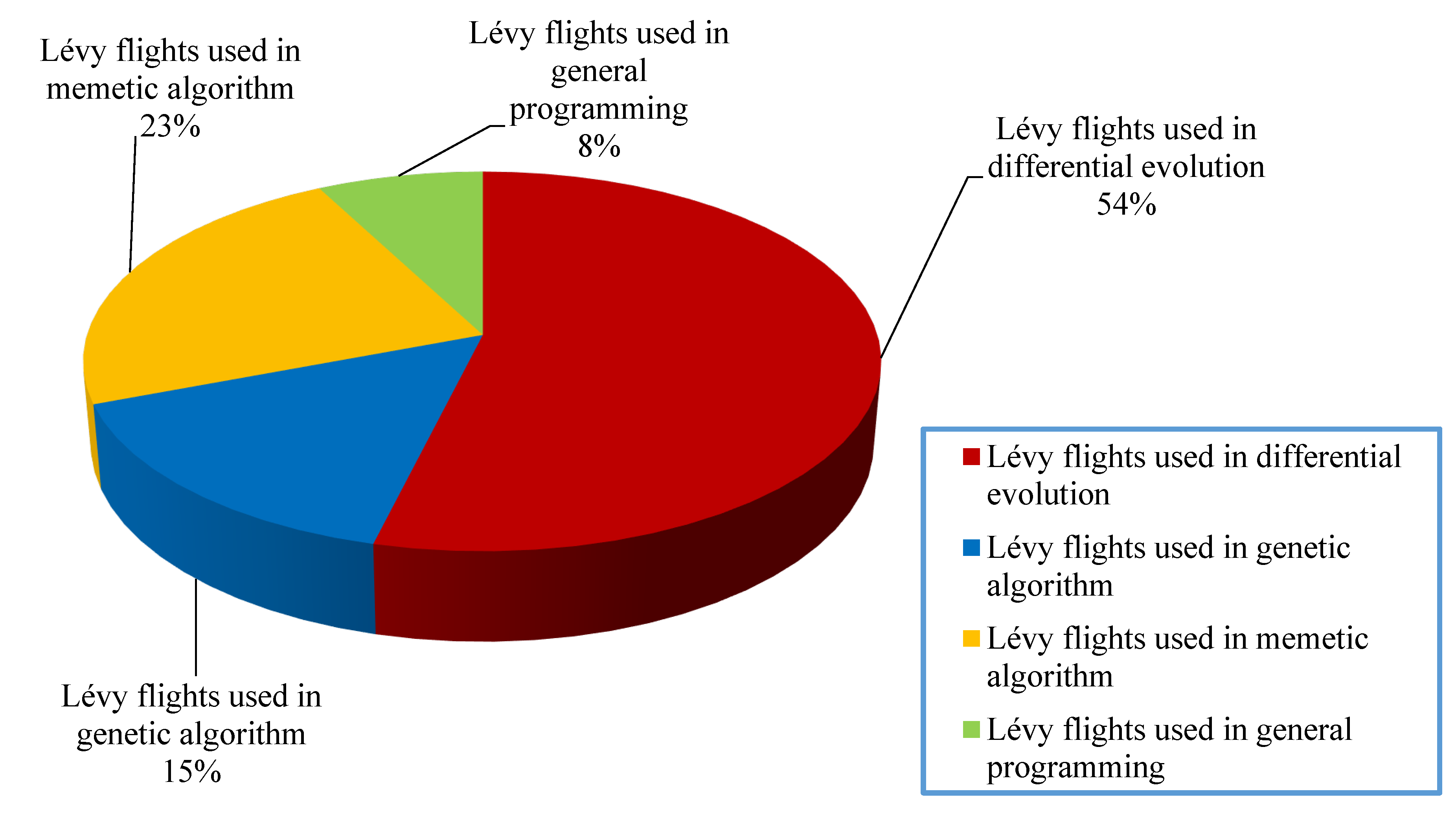{kind=link}
Table 1.
The classification of metaheuristic algorithms with Lévy flight.
| Algorithms | The Literature |
|---|---|
| Cuckoo search having Lévy flight | [16,29,67,68,87,88,89,90,91,92,93,94] |
| Monarch butterfly optimization Algorithm having Lévy flight | [55,95,96] |
| Moth search having Lévy flight | [38,97,98,99,100,101,102,103,104,105,106,107,108,109,110,111] |
Table 2.
The classification of swarm intelligence with Lévy flight.
| Algorithms | The Literature |
|---|---|
| Lévy flight used in particle swarm optimization algorithm | [25,46,47,121,122,123,124,125,126,127,128,129,130,131,132,133,134,135] |
| Lévy flight used in artificial bat algorithm | [136,137,138,139,140] |
| Lévy flight used in bee colony algorithm | [57,58,141,142,143,144,145,146,147,148,149,150,151,152,153] |
| Lévy flight used in whale optimization algorithm | [154,155,156,157,158,159,160] |
| Lévy flight used in moth-flame algorithm | [79,161,162,163,164,165] |
| Lévy flight used in salp swarm algorithm | [31,166,167,168] |
| Lévy flight used in firefly algorithm | [75,76,169] |
| Lévy flight used in elephant herding optimization algorithm | [170,171,172] |
| Lévy flight used in sparrow search algorithm | [173,174] |
| Lévy flight used in krill herd algorithm | [175,176] |
| Lévy flight grey wolf optimization algorithm | [84,177,178,179,180,181,182] |
| Lévy flight used in ant colony optimization algorithm | [183,184,185,186,187,188,189] |
Table 3.
The classification of evolutionary computation with Lévy flight.
| Name | Reference |
|---|---|
| Lévy flight used in differential evolution | [51,112,190,191,192,193,194] |
| Lévy flight used in genetic algorithm | [40,195] |
| Lévy flight used in memetic algorithm | [77,78,196] |
| Lévy flight used in general programming | [197] |
Table 4.
Lévy flight used in neural networks.
| Journal | Author | Year |
|---|---|---|
| Cluster Computing-The Journal of Networks Software Tools and Applications | Alshmrany et al., [198] | 2022 |
| Applied Soft Computing | Alweshah et al., [22] | 2015 |
| Neural Computing and Applications | Amirsadri et al., [199] | 2018 |
| Evolutionary Intelligence | Bousmaha et al., [25] | 2021 |
| Journal of Circuits Systems and Computers | Chidadala et al., [200] | 2021 |
| Journal of Multiple-Valued Logic and Soft Computing | He et al., [201] | 2010 |
| Application Research of Computers | He et al., [202] | 2021 |
| Engineering With Computers | Jalali et al., [203] | 2021 |
| Journal of Ambient Intelligence and Humanized Computing | Khan et al., [204] | 2019 |
| Applied Soft Computing | Li et al., [205] | 2019 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, J.; An, Q.; Lei, H.; Deng, Q.; Wang, G.-G. Survey of Lévy Flight-Based Metaheuristics for Optimization. Mathematics 2022, 10, 2785. https://doi.org/10.3390/math10152785
AMA Style
Li J, An Q, Lei H, Deng Q, Wang G-G. Survey of Lévy Flight-Based Metaheuristics for Optimization. Mathematics. 2022; 10(15):2785. https://doi.org/10.3390/math10152785
Chicago/Turabian StyleLi, Juan, Qing An, Hong Lei, Qian Deng, and Gai-Ge Wang. 2022. "Survey of Lévy Flight-Based Metaheuristics for Optimization" Mathematics 10, no. 15: 2785. https://doi.org/10.3390/math10152785
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.