
Global Dynamics of a Vibro-Impact Energy Harvester
by
Zhenbang Cao
1,2,3,†, 
Haotong Ma
1,2,3,*,
Xuegang Yu
1,2,3,†,
Jianliang Shi
1,2,3,
Hu Yang
1,2,3,*,
Yi Tan
1,2,3 and
Ge Ren
1,2,3 1
Key Laboratory of Optical Engineering, Chinese Academy of Sciences, Chengdu 610209, China
2
The Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China
3
University of Chinese Academy of Sciences, Beijing 100039, China
*
Authors to whom correspondence should be addressed.
†
These authors contributed equally to this work and should be considered co-first authors.
Mathematics 2022, 10(3), 472; https://doi.org/10.3390/math10030472
Submission received: 22 December 2021
/
Revised: 21 January 2022
/
Accepted: 24 January 2022
/
Published: 1 February 2022
(This article belongs to the Topic Dynamical Systems: Theory and Applications)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:In this paper, we consider a two-sided vibro-impact energy harvester described as a forced cylindrical capsule inclined at a horizontal angle, and the motion of the ball inside the capsule follows from the impacts with the capsule ends and gravity. Two distinct cases of dynamical behavior are investigated: the nondissipative and dissipative cases, where the dissipation is given by a restitution coefficient of impacts. We show that the dynamics of the system are described by the use of a 2D implicit map written in terms of the variables’ energy and time when the ball leaves the moving capsule ends. More precisely, in the nondissipative case, we analytically show that this map is area-preserving and the existence of invariant curves for some rotation number with Markoff constant type is proved according to Moser’s twist theorem in high energy. The existence of invariant curves implies that the kinetic energy of the ball is always bounded, and hence, the structure of system is not destroyed by the impacts of the ball. Furthermore, by numerical analysis we also show that the dynamical behavior of this system is regular, mainly containing periodic points, invariant curves and Aubry–Mather sets. After introducing dissipation, the dissipation destroys the regular dynamical behavior of the nondissipative case, and a periodic point with low energy is generated.
1. Introduction
Energy harvesting (EH) refers to the process of converting various renewable energy sources such as wind, solar, wave, and vibration into electrical energy, which usually can be used to complement and substitute other sources of energy [1]. In recent years, a number of well-known conventional transduction methods of converting various energy into electrical energy were explored and developed, including piezoelectric [2], electromagnetic [3], electrostatic [4], and triboelectric [5].
To efficiently capture energy, various mechanical systems and energy conversion methods based on single-degree-of-freedom and multiple-degrees-of-freedom were developed. Linear systems are generally not suitable as EH devices under excitation with varying frequencies, since the high-power output required by the system can only be achieved by near resonance, leading to reliability and fatigue issues [6,7]. Due to these limitations, parametric excitation and nonlinearities are often introduced into systems to improve their performance and amplify their response [8,9,10]. In addition, due to the high efficiency of EH, multistable equilibria systems became increasingly popular in various realistic applications [11,12,13]. The study of vibro-impact (VI) systems for EH and the benefits of exploiting their dynamical behavior were proposed in [14,15]. The study of VI systems is both challenging and fascinating to scientists for two main reasons. The first one is that the simplest VI system has extremely complicated dynamical behavior. The best way to explain this behavior is with the impact-pair model, which is described as the ball of a point mass moving freely inside a 1D box and reflecting when hitting the boundary of the box. Due to the existence of the impacts, it has extremely complicated dynamical behavior, such as grazing bifurcation, singularity, and chaotic attractor [16,17,18,19]. The second is that a proper approach to studying VI systems is to attempt to establish its discrete Poincaré map (sometimes called the first return map). However, this map usually cannot be solved explicitly, thereby presenting the main difficulty with obtaining further analytical results.
Recently, a new type of VI-EH device was proposed in [20,21,22]. The device consists of a forced cylinder and a ball that moves freely inside the cylinder. Both ends of the cylinder are covered with membranes consisting of DE material that is sandwiched between two compliant electrodes, thereby acting as a variable capacitance capacitor. The principle of EH is that the ball impacts against one of the membranes and causes it to deform, resulting in a change in capacitance between the initial and deformed stated, leading to EH. Thus, the kinetic energy is converted through the impacts of the potential energy of the deformed membrane, and then into electrical energy. Here, we consider a VI-EH system described as as a small ball rolling inside a forced cylindrical capsule that is reflected after hitting the capsule ends. The main contribution of this paper is that we prove that the structure of the system is not destroyed by the impact of the ball. More precisely, in the nondissipative case, a proof of the existence of invariant curves is proved according to Moser’s twist theorem, which in turn proves that the kinetic energy of the ball is always bounded. Moreover, through the numerical simulation results, we find that in the nondissipative case, the energy of the ball is dissipative; i.e., infinite energy cannot also appear. Therefore, the structure of the system is not destroyed. The rest of this paper is organized as follows. In Section 2, we present a VI-EH and establish its Poincaré map. In Section 3, the existence of invariant curves is proved according to a version of Morser’s twist theorem. In Section 4, the global dynamical behavior of the system is investigated by numerical simulations, and the theoretical results are further verified. We draw the conclusions of this paper in Section 5.
2. Statement of the Problem
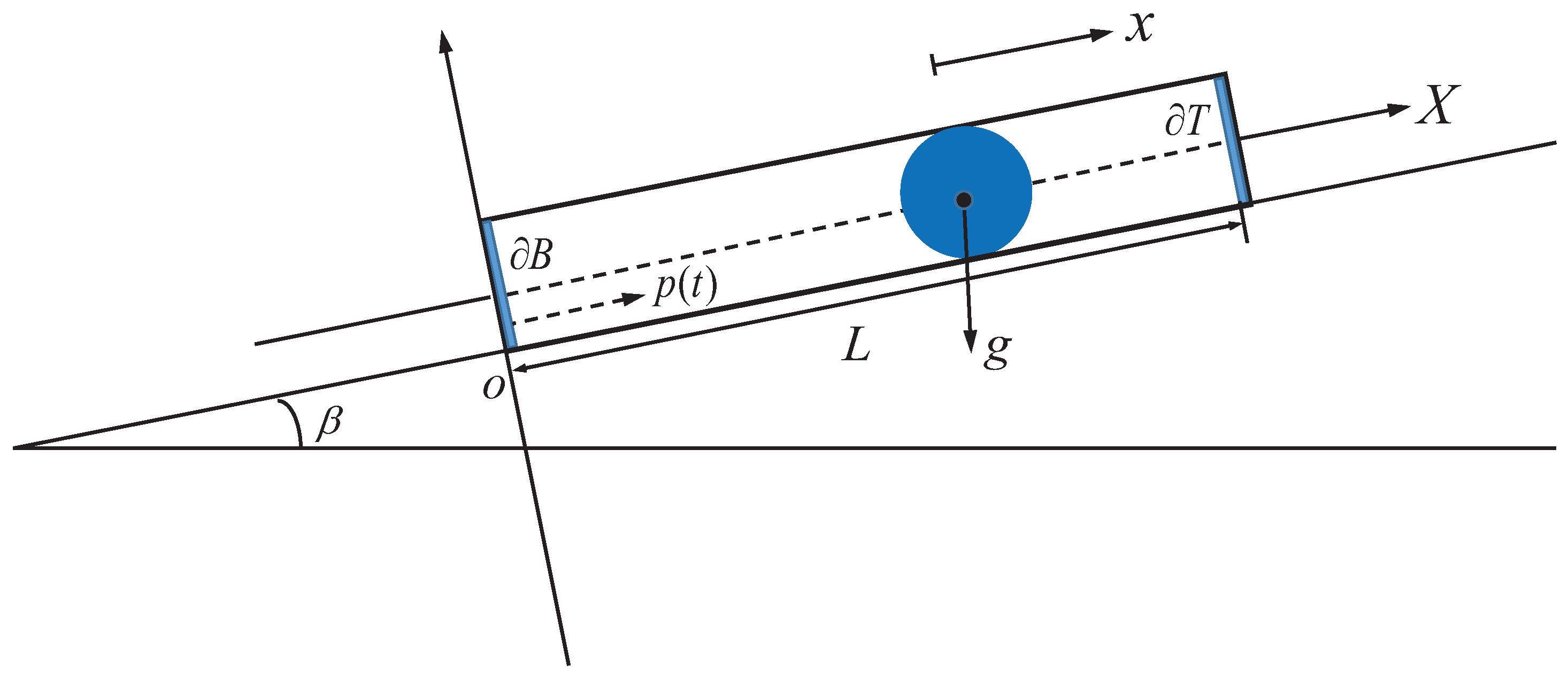
The VI-EH system can be modeled as a small ball of unitary mass rolling inside a forced cylindrical capsule that is inclined at a horizontal angle of , along with two DE membranes and for harvesting energy from ambient vibrations at the bottom and top of the capsule at distance L apart. The friction between the ball and the capsule is neglected, thus the motion of the ball is driven purely by impacts with one of the DE membranes and gravity. The elastic restitution coefficient for impacts between the ball and the DE membranes is , and the mass of the capsule is huge with respect to the mass of the ball, which means that the impacts do not affect the motion of the capsule. Assume that the capsule moves periodically according to a and 1-periodic function , i.e., , see Figure 1.
Using the absolute coordinates, under the influence of the gravity and inclined angle, the motion of the ball moving inside the capsule satisfies as
where g is the gravitational acceleration. Assume that the motion equation of is
then, the motion equation of is .
Assuming that the impact occurs at instant , we consider the following problem
where and are the velocity of the ball before and after the impact at , respectively.
Remark 1.
Note that the grazing and chattering phenomenons can also occur in this system, but we do not discuss them here because the research required to analyze them needs different approaches.
The problem (3) can usually be formulated in discrete form. Let denote the velocity of the ball. Suppose that at time t the ball impacts with and attains a velocity v after impact. Then, it moves from to and reaches at time with the velocity . After impact with , the ball attains a velocity . Continuing this process, the ball moves from to and reaches at time with the velocity . After impacts with , the ball attains a velocity . Based on the above analysis, we obtain
and
The relative velocity of the ball and before and after an impact is related by
It gives
Completely similar to the above analysis, we have
and
The relative velocities of the ball and before and after an impact are related by
It gives that
A good strategy to describe the motion of the ball at the moments of impact with the same moving membranes (or ) in problem (3) is to define a Poincaré map P that sends the couple to . In the following, we introduce a notion to construct the map P.
Define the sections
and
Moreover, define the sections
and
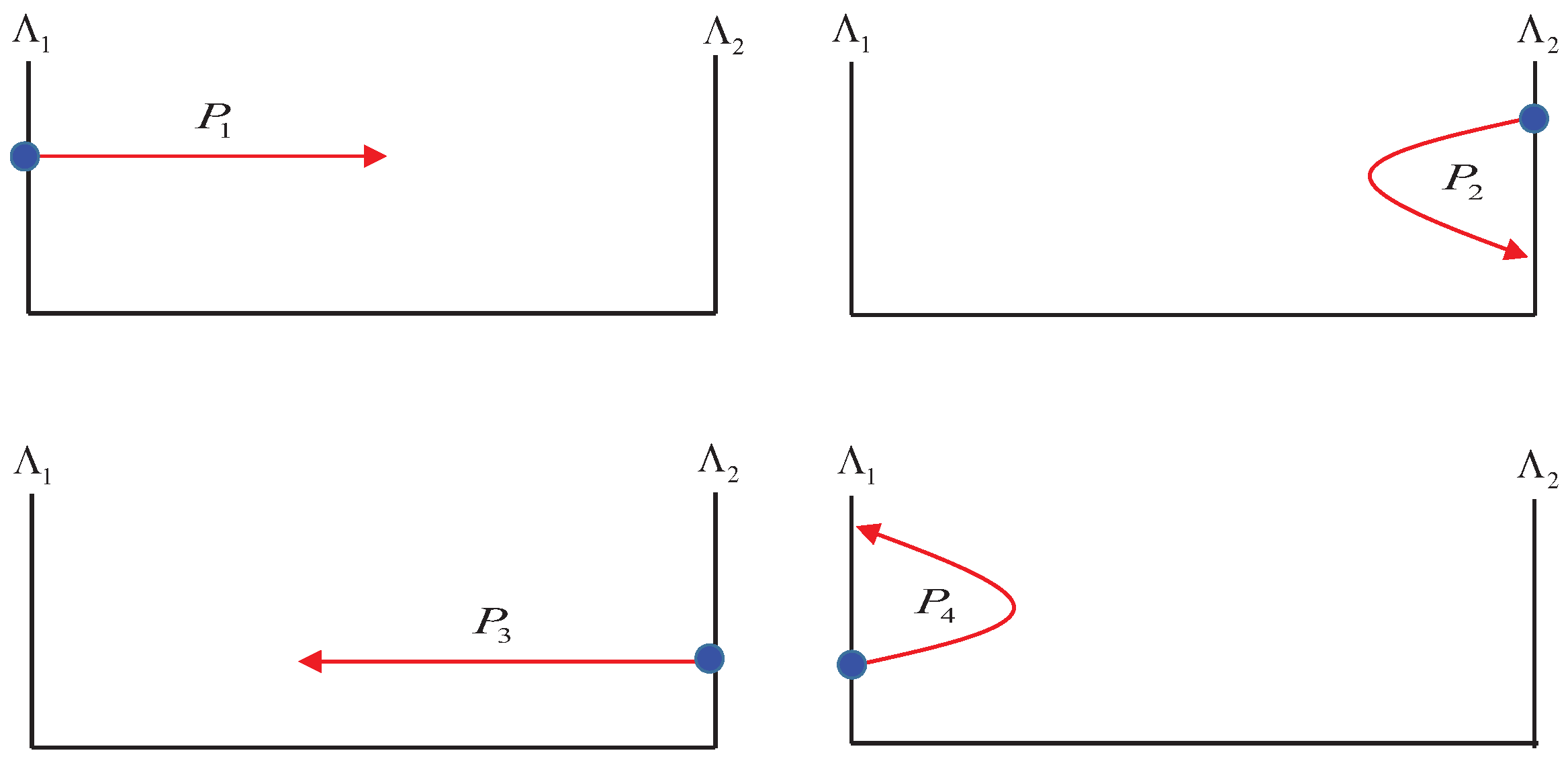
The section (or ) can be interpreted as the Poincaré section. Thus, we obtain four basic maps , , , , which is defined by
respectively, see Figure 2.
Define the composition map , and then P is regarded as a Poincaré map of problem (3).
Lemma 1.
The Poincaré map P has the expansion
where
Lemma 2.
There is a sufficiently large constant such that if the initial velocity and for every , then the Poincaré map P is well defined and belongs to a class of functions of .
Remark 2.
Note that P is a 2D implicit map written in terms of the variables’ energy and time when the ball leaves the moving capsule ends, which usually give rise to the main difficulties for analytical investigation.
Lemma 3.
There exists a constant sufficiently large constant and such that the Poincaré map P is an area-preserving map in the nondissipative case, i.e., the elastic restitution coefficient .
Proof.
When , by Lemma 1, the Poincaré map P is
Let , , , . For the maps and , the integral invariant of Poincaré–Cartan (c.f. [23]) yields
where is any a Jordan curve in the definition region P.
Set , , . This transforms Equation (18) to
It is obvious that the curves and either intersect or one of them goes around the other. Suppose that the later case occurs and let denote the domain that is bounded by and . When is sufficiently large, by Green’s formula (c.f. [23]) and (21), we have In fact, when is sufficiently large, we also have This naturally leads to a contradiction; thus, the intersection of the curves and is nonempty (called Moser’s intersection property) and the Poincarḿap P is an area-preserving map. □
3. The Existence of Invariant Curves
In this section, a proof of the existence of invariant curves for the system is given, based on Moser’s twist theorem in the nondissipative case. To illustrate the main results below, we first briefly review some of the definitions and results of Moser’s twist theorem investigations into area-preserving maps [23,24,25].
By [26], we know that an irrational number is said to be a type of constant . If is defined by
then it is strictly positive and is called the Markoff constant of .
Lemma 4.
In choosing a 1D interval with on the real-number axial, there exists a constant type such that the corresponding Markoff constant satisfies .
Theorem 1.
(Moser’s twist theorem) Assume that the operator is a diffeomorphism that belongs to a class of functions of and is a 1-periodic function with respect to the variable θ. Moreover, assume that the specific form of Φ is
where and α is an irrational number of constant type with Markoff constant γ, thereby satisfying
for some fixed b. We also assume that the operator Φ has Moser’s intersection property (see the proof of Lemma 2.3), i.e., for any parameterized Jordan curve located in region that satisfies , there is a positive constant C that depends only on fixed b, such that if
then there exists such that is invariant under the action of operator Φ, and the rotation number of is α.
Remark 3.
We are now ready to prove the main result of this paper, say
Theorem 2.
There exists a constant number such that if the function p satisfies
then there exist curves with that are invariant under the Poincaré map P, resulting in the energy of the ball always being bounded.
Proof.
Let
By Lemma 4, we get a sequence of irrational numbers of constant type converging to 0, and this satisfies
Define by and consider transformation
The transformation maps the region to the region . Since , the distance from the region to the line goes to infinity when . Let
We obtain
where
Since the map P satisfies the Moser’s intersection property (see the proof of Lemma 3) and is homeomorphic to P, we can conclude that also satisfies Moser’s intersection property. Since (23) holds for , then we can apply Theorem 1 as soon as both and are sufficiently small. The case is held because we chose an n that is sufficiently large and assumed that is sufficiently small. Thus, by Theorem 1, has an invariant curve. We then obtain a curve with via the transformation , which is also invariant under the action of P. After passing to a subsequence , we assume that and uniformly with respect to . Define a region
for . The region is homomorphically mapped to its image by P, and the boundary of is invariant. Thus, must be invariant under the action of P. Let be a constant such that . When , it follows that for some . By invariance of , the orbit is completely contained in . Therefore, we conclude that is bounded, i.e., the energy of the ball is bounded. □
Remark 4.
According to Theorem 3.2, the existence of invariant curves also provides the stability results of the problem (3): if the initial condition of the system is on an invariant curve, then the future dynamical evolution will stay confined to that invariant curve forever; if the initial condition of the system lies between two invariant curves, the future dynamical evolution will stay bounded between them forever. Moreover, the existence of invariant curves also ensures that the kinetic energy of the ball is always bounded, and hence, the structure of VI-EH is not destroyed by the impact of the ball.
Remark 5.
The symmetry of the system is mainly reflected in two aspects: on the one hand, it refers to the geometric symmetry of the system; on the other hand, it refers to the symmetry of the dynamical behavior of the system. The geometric symmetry is obvious. If the DE materials covered in both ends of the cylinder capsule are different, that is, the restitution coefficients of the collisions are different, then the dynamic behavior of the system is asymmetric (see [30] for a similar analysis). If the restitution coefficients of the collisions are the same and is chosen as a class of specific functions that satisfies (n is odd integer), then the Poincaré map P of problem (3) has the property of symmetry, such that if Γ is an invariant curve of P, then is also an invariant curve of P (c.f. [31,32]).
Remark 6.
If , then the cylindrical capsule moves along the horizontal direction, and Theorem 2 still holds in this case.
4. Numerical Simulations
In this section, we discuss the numerical simulations results obtained from the VI-EH system to further verify our theoretical results. We first discuss the dynamical behavior of the system in the nondissipative case, and then discuss the dissipative case.
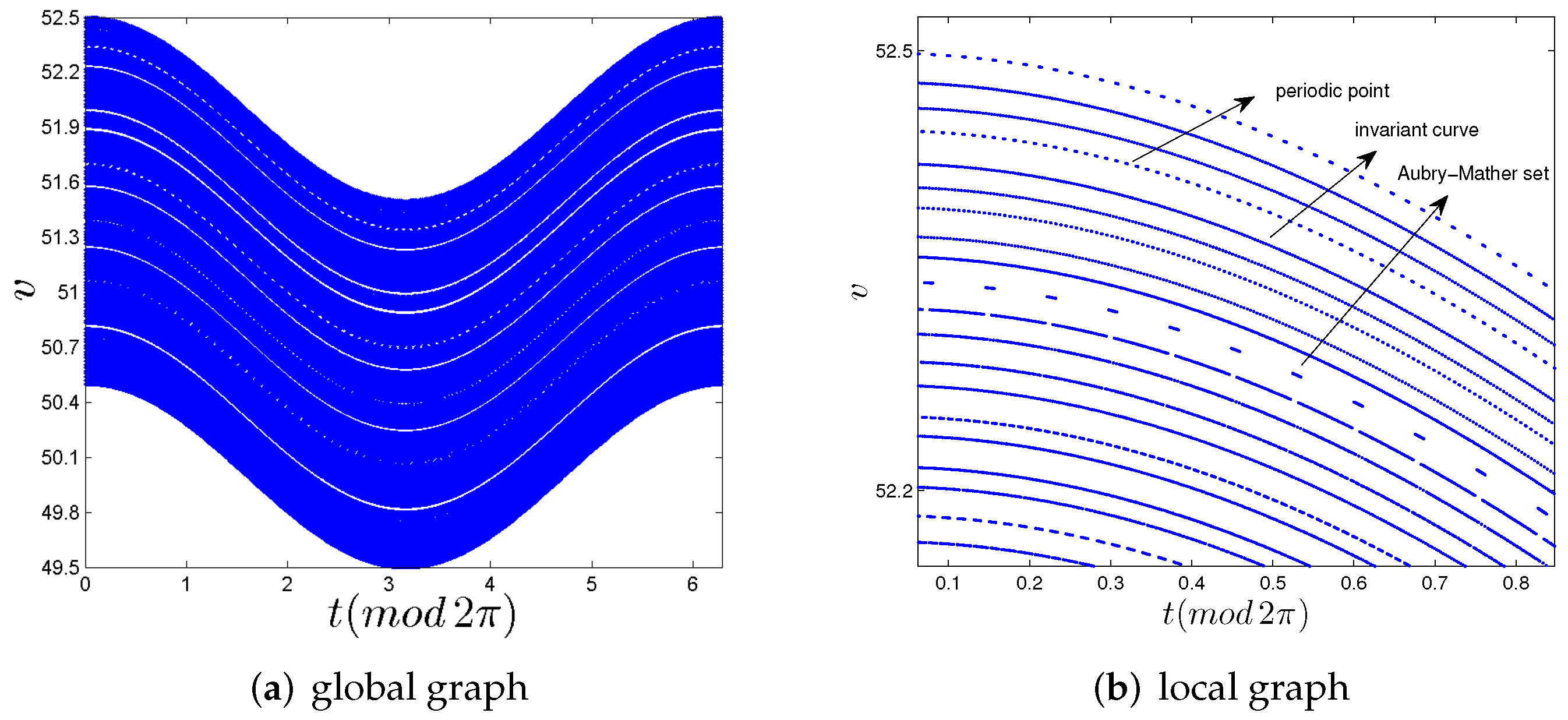
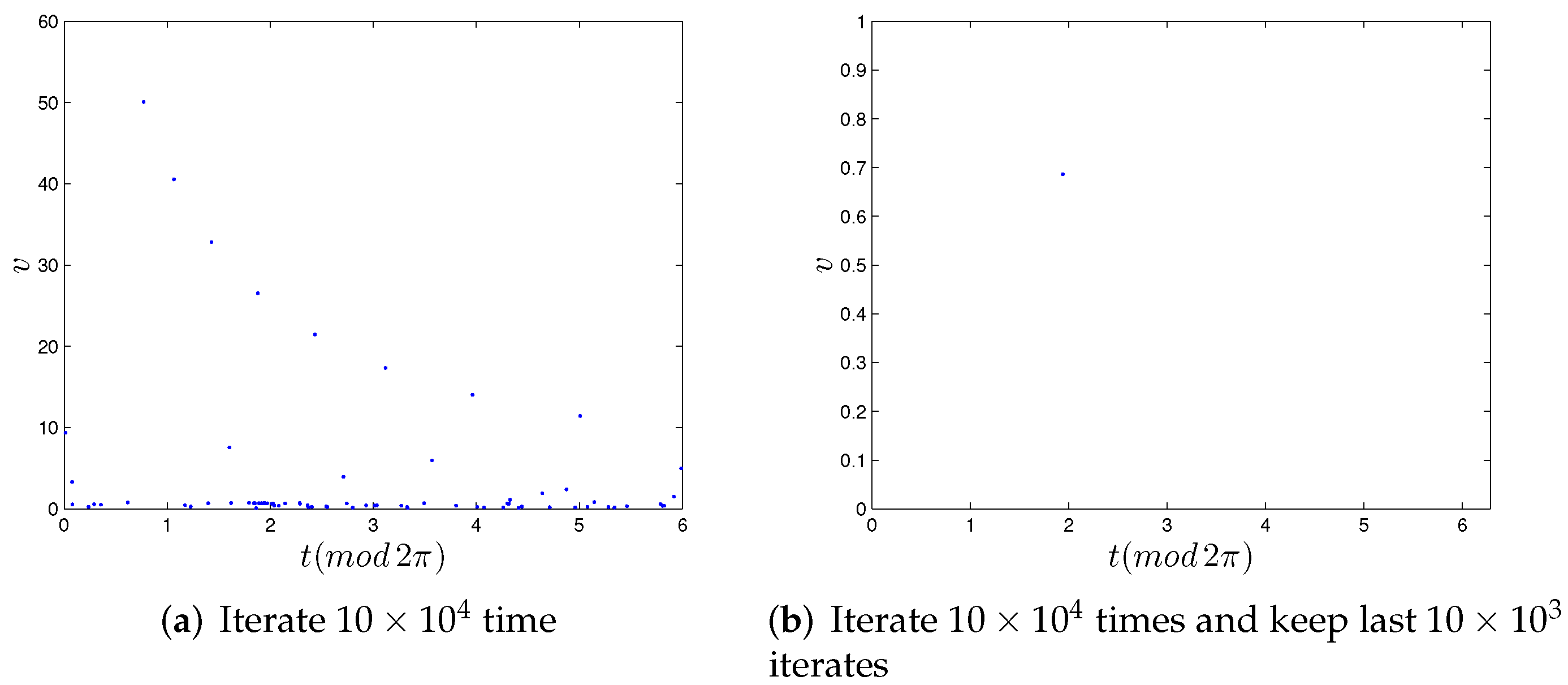
Choose , , m and v change from 50 m/s to 52 m/s. We find that the system exhibits regular dynamic behavior, mainly containing periodic points (Birkhoff type), invariant curves, and Aubry–Mather sets (the definition of Aubry–Mather sets can be found in [33]), see Figure 3. Moreover, the existence of invariant curves also ensures that the kinetic energy of the ball is always bounded. For the same parameter condition, i.e., only choosing m/s, e = 0.99, the dissipation introduced by the coefficient of restitution e destroys the regular dynamic behavior in the nondissipative case and generates a low-energy periodic point, see Figure 4.
5. Conclusions
In this work, we consider a two-sided vibro-impact energy harvester (VI-EH) system. Our main objective is to investigate whether the structure of the system will be destroyed by the impact of the ball. For this objective, we study the nondissipative and dissipative cases of the system, respectively. We show that the dynamics of the system are described by the use of a 2D implicit map, and the existence of invariant curves in the nondissipative case is proved by using Moser’s twist theorem. Thus, in nondissipative case, the kinetic energy of the ball is always bounded, and the structure of system is not destroyed by the impacts of the ball. Furthermore, by numerical analysis we also obtain that the dynamical behavior of this system is regular. After the introduction of dissipation, the dissipation destroys the regular dynamical behavior in the nondissipative case, and a periodic point with low energy appears. In summary, the structure of the system was not destroyed, and the theoretical analysis shows that this is mainly related to the smoothness of the system.
Author Contributions
Z.C. and X.Y.: writing—original draft preparation; H.M. and H.Y.: methodology; J.S.: software; Y.T. and G.R.: formal analysis and investigation. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundations of China (12172306 and 11732014).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All data used during the study appear in the submitted article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Daqaq, M.F.; Masana, R.; Erturk, A.; Quinn, D.D. On the role of nonlinearities in vibratory energy harvesting: A critical review and discussion. Appl. Mech. Rev. 2014, 66, 040801. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, S.; Zu, J.; Inman, D. High-performance piezoelectric energy harvesters and their applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef] [Green Version]
- Carneiro, P.; dos Santos, M.P.S.; Rodrigues, A.; Ferreira, J.A.; Simões, J.A.; Marques, A.T.; Kholkin, A.L. Electromagnetic energy harvesting using magnetic levitation architectures: A review. Appl. Energy 2020, 260, 114191. [Google Scholar] [CrossRef] [Green Version]
- Thomson, G.; Lai, Z.; Val, D.; Yurchenko, D. Advantages of nonlinear energy harvesting with dielectric elastomers. J. Sound Vib. 2019, 442, 167–182. [Google Scholar] [CrossRef]
- Zhao, H.; Ouyang, H. A capsule-structured triboelectric energy harvester with stick-slip vibration and vibro-impact. Energy 2021, 235, 121393. [Google Scholar] [CrossRef]
- Bowen, C.; Kim, A.; Weaver, P.; Dunn, S. Piezoelectric and ferroelectric materials and structures for energy harvesting applications. Energy Environ. Sci. 2014, 7, 25–44. [Google Scholar] [CrossRef] [Green Version]
- Salazar, R.; Larkin, K.; Abdelkefi, A. Piezoelectric property degradation and cracking impacts on the lifetime performance of energy harvesters. Mech. Syst. Signal. Process 2021, 156, 107697. [Google Scholar] [CrossRef]
- Alevras, P.; Theodossiades, S.; Rahnejat, H. Broadband energy harvesting from parametric vibrations of a class of nonlinear Mathieu systems. Appl. Phys. Lett. 2017, 110, 233901. [Google Scholar] [CrossRef]
- Xia, G.; Fang, F.; Zhang, M.; Wang, Q.; Wang, J. Performance analysis of parametrically and directly excited nonlinear piezoelectric energy harvester. Arch. Appl. Mech. 2019, 89, 2147–2166. [Google Scholar] [CrossRef]
- Nabholz, U.; Lamprecht, L.; Mehner, J.; Zimmermann, A. Degenfeld-Schonburg Peter. Parametric amplification of broadband vibrational energy harvesters for energy-autonomous sensors enabled by field-induced striction. Mech. Syst. Signal Process 2020, 139, 106642. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Geng, L.; Zhou, S.; Zhang, Z.; Lai, Z.; Yurchenko, D. Design, modeling and experiments of broadband tristable galloping piezoelectric energy harvester. Acta Mech. Sin. 2020, 36, 592–605. [Google Scholar] [CrossRef]
- Fu, H.; Mei, X.; Yurchenko, D.; Zhou, S.; Nakano, K.; Yeatman, E. Rotational energy harvesting for self-powered sensing. Joule 2021, 5, 1074–1118. [Google Scholar] [CrossRef]
- Fang, S.; Zhou, S.; Yurchenko, D.; Yang, T.; Liao, W. Multistability phenomenon in signal processing, energy harvesting, composite structures, and metamaterials: A review. Mech. Syst. Signal Process 2022, 166, 108419. [Google Scholar] [CrossRef]
- Fu, Y.; Ouyang, H.; Davis, R. Triboelectric energy harvesting from the vibro-impact of three cantilevered beams. Mech. Syst. Signal Process 2019, 121, 509–531. [Google Scholar] [CrossRef]
- Cao, D.; Xia, W.; Guo, X.; Lai, S. Modeling and experiment of vibro-impact vibration energy harvester based on a partial interlayer-separated piezoelectric beam. J. Intell. Mater. Syst. Struct. 2021, 32, 817–831. [Google Scholar] [CrossRef]
- Zhang, Y.; Fu, X. Stability of periodic motions in an inclined impact pair. Eur. Phys. J. Spec. Top. 2019, 228, 1441–1457. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, Y. Stick motions and grazing flows in an inclined impact oscillator. Chaos Solitons Fractals 2015, 76, 218–230. [Google Scholar] [CrossRef]
- Luo, A.; Guo, Y. Vibro-Impact Dynamics; John Wiley & Sons Ltd.: Oxford, UK, 2013. [Google Scholar]
- Luo, A. Period-doubling induced chaotic motion in the LR model of a horizontal impact oscillator. CHaos Soliton. Fract. 2004, 19, 218–230. [Google Scholar] [CrossRef]
- Yurchenko, D.; Lai, Z.; Thomson, G.; Val, D.; Bobryk, R. Parametric study of a novel vibro-impact energy harvesting system with dielectric elastomer. Appl. Energy 2017, 208, 456–470. [Google Scholar] [CrossRef]
- Serdukova, L.; Kuske, R.; Yurchenko, D. Stability and bifurcation analysis of the period-T motion of a vibroimpact energy harvester. Nonlinear Dyn. 2019, 98, 1807–1819. [Google Scholar] [CrossRef]
- Yurchenko, D.; Val, D.; Lai, Z.; Thomson, G. Energy harvesting from a DE-based dynamic vibro-impact system. J. Smart Mater. Struct. 2017, 26, 105001. [Google Scholar] [CrossRef] [Green Version]
- Arnold, V.; Kozlov, V.; Neishtadt, A. Mathematical Aspects of Classical and Celestial Mechanics; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Katok, A.; Hasselblatt, B. Introduction to the Modern Theory of Dynamical Systems; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Moser, J. Selected Chapters in the Calculus of Variations; Birkhäuser: Boston, MA, USA, 2003. [Google Scholar]
- Ortega, R. Asymmeetric oscillators and twist mappings. J. Lond. Math. Soc. 1996, 53, 325–342. [Google Scholar] [CrossRef]
- Herman, M. Sur les courbes invariantes par les difféomorphismes de l’anneau. Astérisque 1983, 103–104, 1–221. [Google Scholar]
- Zhang, X.; Xie, J.; Li, D.; Cao, Z.; Grebogi, C. Stability analysis of the breathing circle billiard. Chaos Soliton. Fract. 2021, 155, 111643. [Google Scholar] [CrossRef]
- Ortega, R. Boundedness in a piecewise linear oscillator and a variant of the small twist theorem. Proc. Lond. Math. Soc. 1999, 79, 381–413. [Google Scholar] [CrossRef] [Green Version]
- Dulin, S.; Lin, K.; Serdukova, L.; Kuske, R.; Yurchenko, D. Improving the performance of a two-sided vibro-impact energy harvester with asymmetric restitution coefficients. Int. J. Mech. Sci. 2022, 217, 106983. [Google Scholar] [CrossRef]
- Cao, Z.; Zhang, X.; Li, D.; Yin, S.; Xie, J. Existence of invariant curves for a Fermi type impact absorber. Nonlinear Dyn. 2020, 99, 2647–2656. [Google Scholar] [CrossRef]
- Yue, Y.; Xie, J. Symmetry and bifurcations of a two-degree-of-freedom vibro-impact system. J. Sound Vib. 2008, 314, 228–245. [Google Scholar] [CrossRef]
- Cao, Z.; Grebogi, Z.; Li, D.; Yue, Y.; Xie, J. On the global dynamical properties of a Fermi-Ulam model. Differ. Equ. Appl. 2021, 27, 1647–1656. [Google Scholar] [CrossRef]
Figure 1.
Schematic for vibro-impact energy harvesting (VI-EH) system.

Figure 2.
Schematic for four basic maps.

Figure 3.
Regular dynamic behavior containing reriodic points, invariant curves, and Aubry–Mather sets.
Figure 3.
Regular dynamic behavior containing reriodic points, invariant curves, and Aubry–Mather sets.

Figure 4.
A low-energy periodic point.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Cao, Z.; Ma, H.; Yu, X.; Shi, J.; Yang, H.; Tan, Y.; Ren, G. Global Dynamics of a Vibro-Impact Energy Harvester. Mathematics 2022, 10, 472. https://doi.org/10.3390/math10030472
AMA Style
Cao Z, Ma H, Yu X, Shi J, Yang H, Tan Y, Ren G. Global Dynamics of a Vibro-Impact Energy Harvester. Mathematics. 2022; 10(3):472. https://doi.org/10.3390/math10030472
Chicago/Turabian StyleCao, Zhenbang, Haotong Ma, Xuegang Yu, Jianliang Shi, Hu Yang, Yi Tan, and Ge Ren. 2022. "Global Dynamics of a Vibro-Impact Energy Harvester" Mathematics 10, no. 3: 472. https://doi.org/10.3390/math10030472
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.