
Utilizing Dynamic Analysis in the Complex Design of an Unconventional Three-Wheeled Vehicle with Enhancing Cornering Safety



Abstract
:1. Introduction
2. Materials and Methods
- The design of the axle steering mechanism must prevent shocks and vibrations in the steering system, as discussed in the publication [7].
- The steering axle must return to the straight position after completing a turn or require less force than that needed to initiate a change in direction, as addressed in the publication [7].
- When transitioning from a straight path to a curve with a radius of 12 m at a speed of 10 km/h, the manual force applied to the steering wheel must not exceed 250 N. The authors further discuss the fulfillment of this requirement in the article.
2.1. Variant Solutions for Vehicle Design Modifications to Meet Roadworthiness Requirements
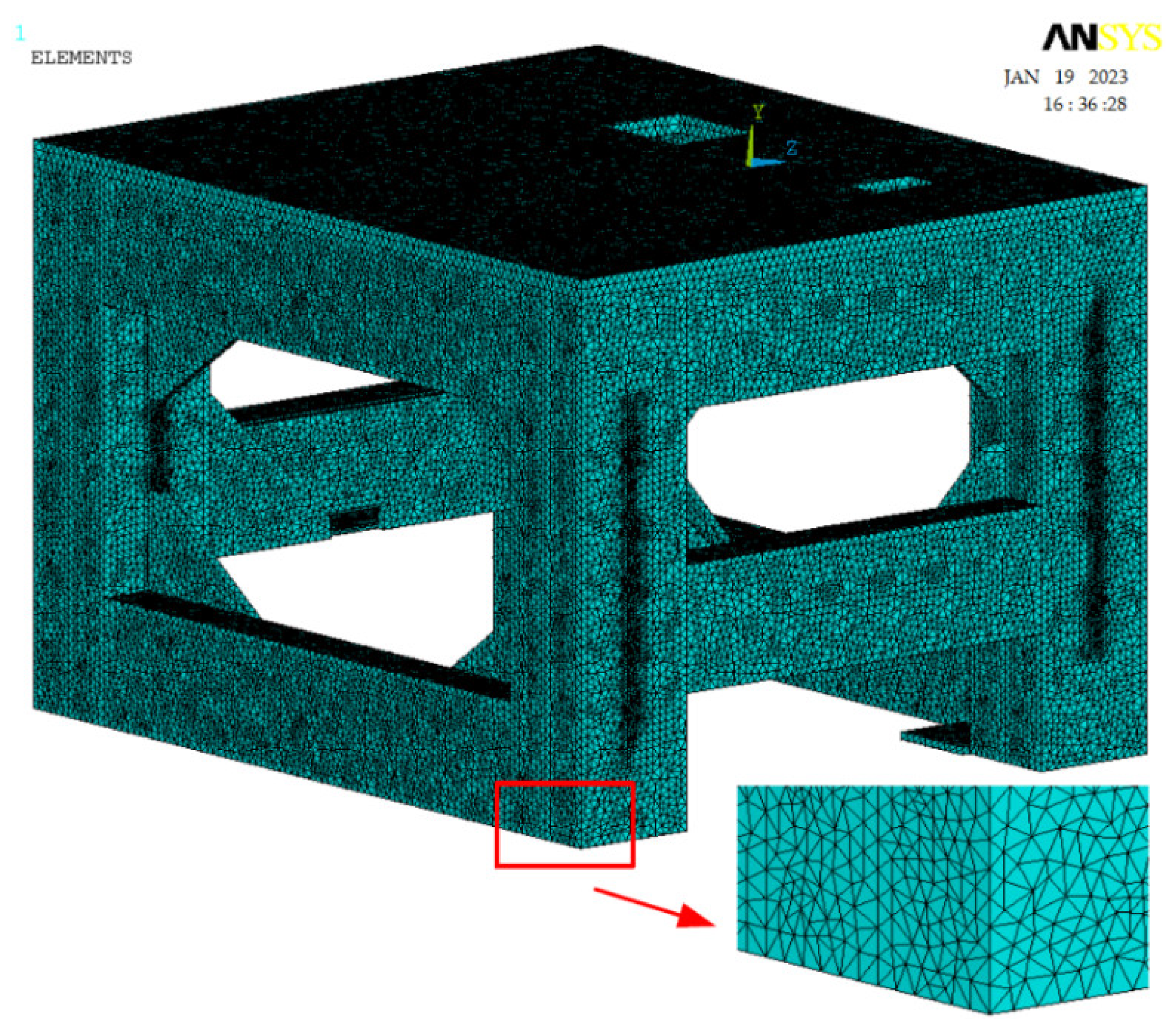
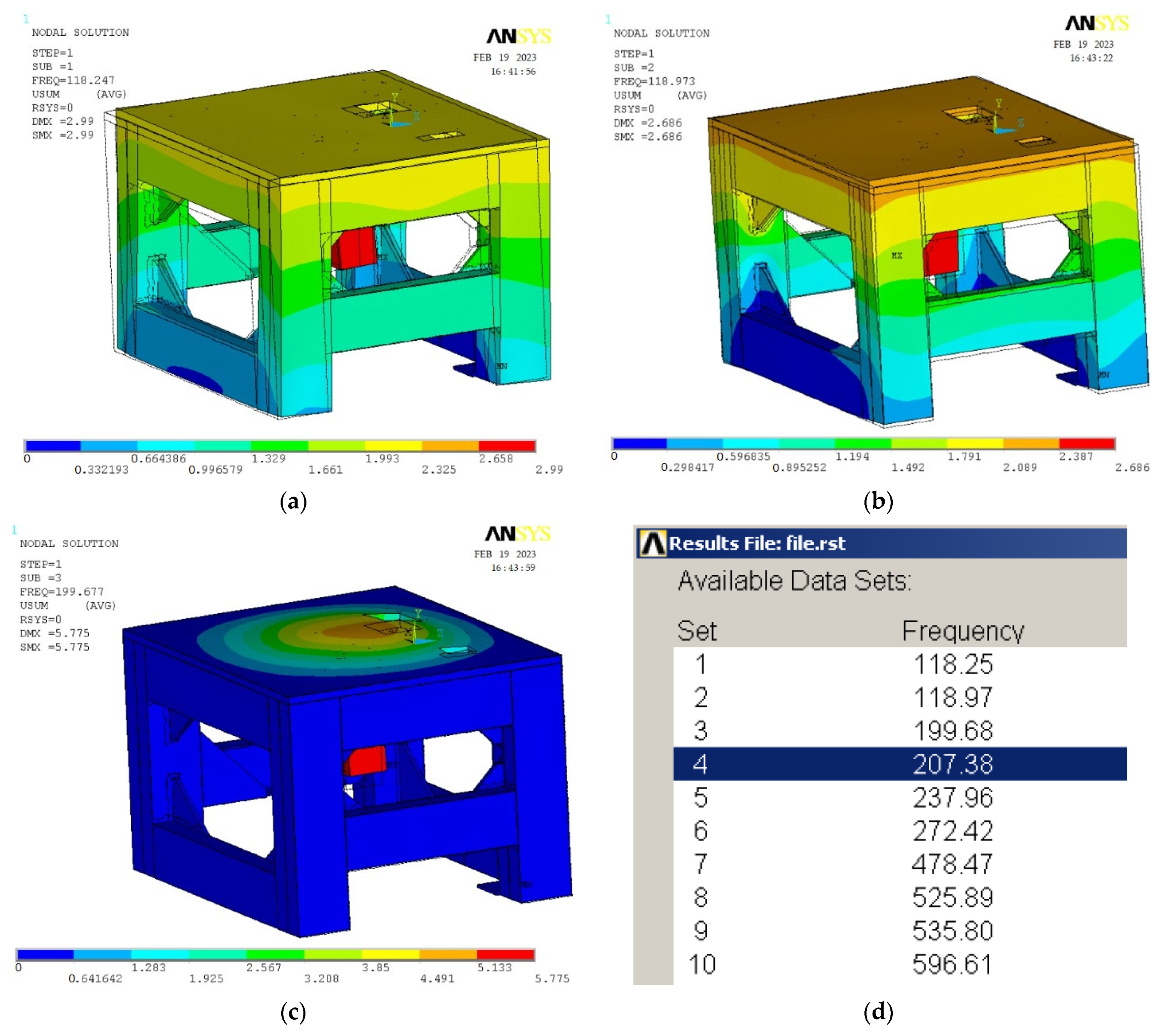
2.2. The Dynamic Analysis in the Design of a Fatigue Testing Device for Combined Torsion and Bending
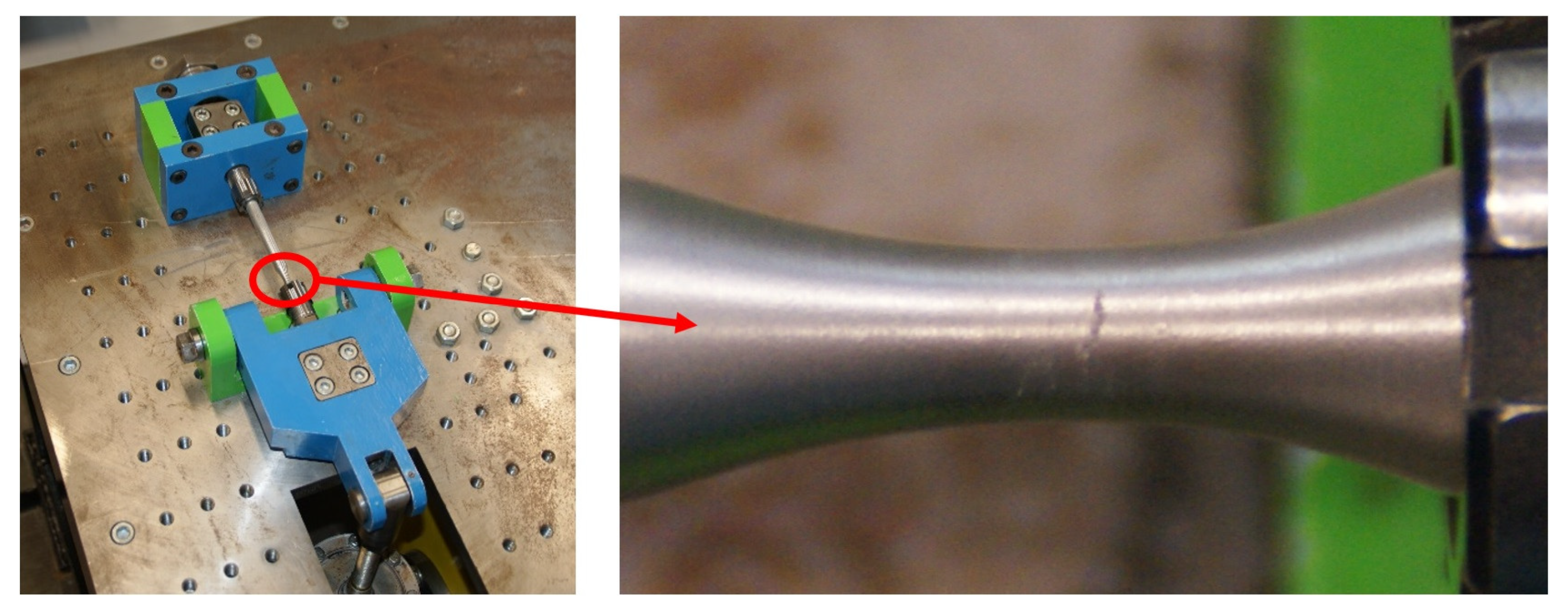
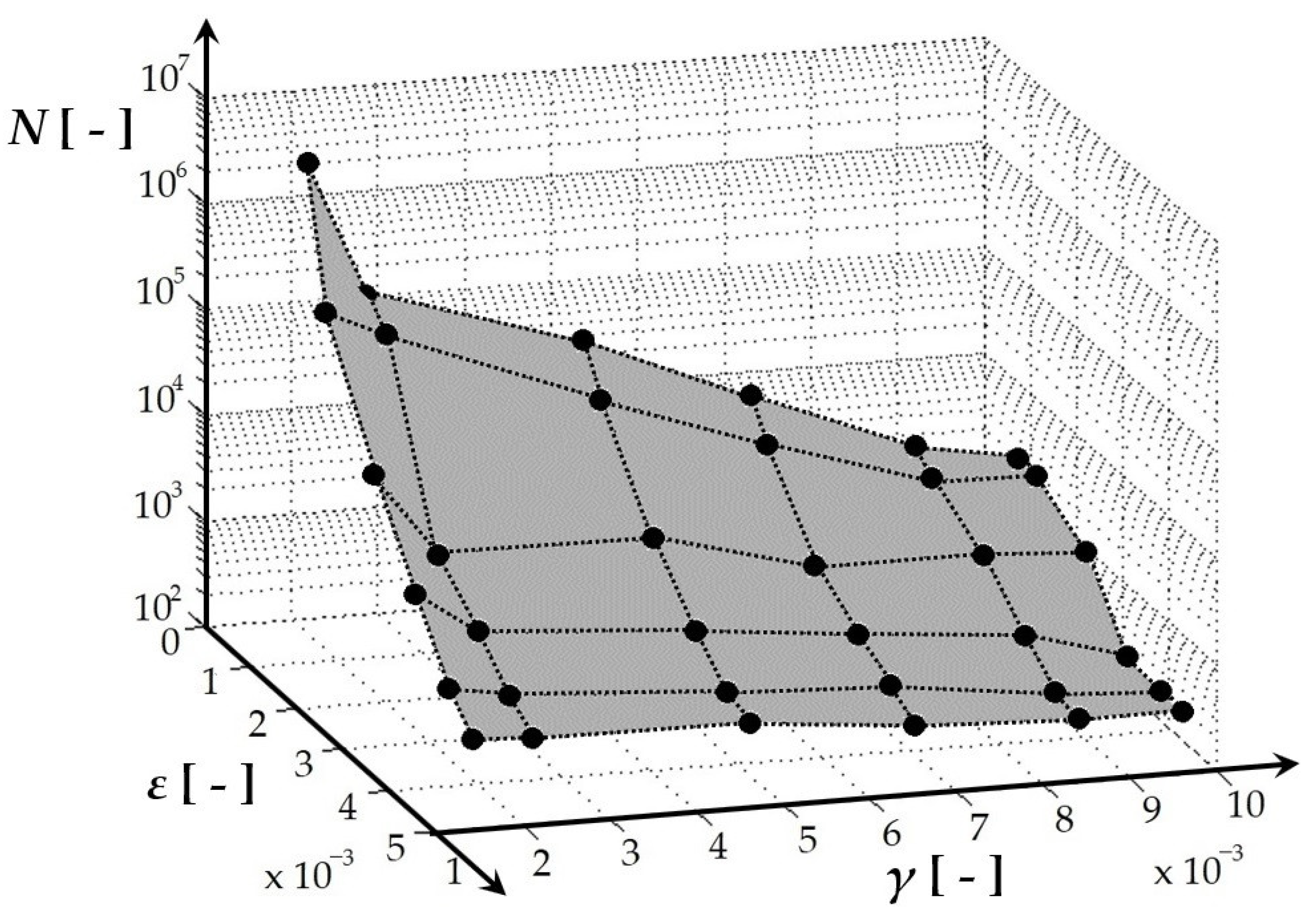
2.3. Methodology for Measuring the Fatigue Life of the Structural Material of a Vehicle Frame
2.4. Dynamic Simulation of a Designed Vehicle’s Driving
3. Results
- Experimental domain:
- Pertinent details regarding the design of the testing device used to measure the fatigue life of materials;
- Measurements of the fatigue life of the frame material employed in the proposed vehicle;
- Theoretical domain:
- Insights into potential structural modifications aimed at enhancing the vehicle’s roadworthiness;
- Numerical results comparing the effect of the suspension mechanism of the front steering wheel in both conventional and non-conventional designs.
3.1. Vehicle Design Modification to Fulfil Roadworthiness
3.2. Research Findings on Dynamic Characteristics of a Fatigue Testing Device
3.3. Research Findings on Multiaxial Fatigue Life Measurement of Structural Material in Vehicle Frame
3.4. Research Findings on Dynamic Simulations of a Designed Vehicle’s Driving
4. Discussion
5. Conclusions
- Three alternative design solutions were presented to ensure compliance with the maximum steering force requirement on the steering wheel (below 250 N) and facilitate the selection of the optimal solution;
- The structurally robust frame was developed for a fatigue life testing device, which underwent dynamic analysis to ensure safety;
- The original methodology for measuring multiaxial fatigue life was summarized;
- Dynamic models were created for both conventional and unconventional vehicles, incorporating parameters that correspond to real-world conditions;
- The vehicle design, featuring a patented front-wheel suspension system, exerts a significant influence on safety and ride comfort;
- The proposed vehicle meets the legislative requirements for roadworthiness in Slovakia;
- The safety of the proposed vehicle’s frame is guaranteed in terms of its fatigue life;
- The proposed vehicle enhances the maximum safe cornering speed compared to conventional three-wheeled vehicles;
- Most importantly, the achievement of all the aforementioned findings is based on a more cost-effective mechanical principle.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- UV 3984, SK. Available online: https://wbr.indprop.gov.sk/WebRegistre/UzitkovyVzor/?lang=en (accessed on 15 May 2023).
- Blatnický, M.; Sága, M.; Dižo, J.; Bruna, M. Application of light metal alloy EN AW 6063 to vehicle frame construction with an innovative steering mechanism. Materials 2020, 13, 817. [Google Scholar] [CrossRef] [PubMed]
- National Highway Traffic Safety Administration. Available online: http://www.yasa.org/upload/uploadedfiles/IPTRolloverMitigationReport.pdf (accessed on 5 June 2023).
- Chen, C.F. Personality, safety attitudes and risky driving behaviours-Evidence from young Taiwanese motorcyclists. Accid. Anal. Prev. 2009, 41, 963–968. [Google Scholar] [CrossRef] [PubMed]
- Forkenbrock, G.J.; Garrott, W.R.; Heitz, M.; O’Harra, B.C. An experimental examination of J-turn and fishhook maneuvers that may induce on-road, untripped, light vehicle rollover. J. Passeng. Car: Mech. Syst. J. 2003, 112, 1112–1127. [Google Scholar]
- Gawade, T.; Mukherjee, S.; Mohan, D. Rollover propensity of three-wheel scooter taxis. SAE Tech. Pap. Ser. 2004. [Google Scholar] [CrossRef]
- Blatnicky, M.; Dizo, J.; Molnar, D.; Suchanek, A. Comprehensive analysis of a tricycle structure with a steering system for improvement of driving properties while cornering. Materials 2022, 15, 8974. [Google Scholar] [CrossRef]
- Blatnický, M.; Dižo, J.; Sága, M.; Brůna, M.; Vaško, M. Experimental research on Manson-Coffin curves for the frame material of an unconventional vehicle. Materials 2022, 15, 1768. [Google Scholar] [CrossRef]
- Moravec, J.; Kopas, P.; Jakubovicova, L.; Leitner, B. Experimental casting of forging ingots from model material. In Proceedings of the 22nd Slovak-Polish Scientific Conference on Machine Modelling and Simulation MMS, Sklene Teplice, Slovakia, 5–8 September 2017. [Google Scholar]
- Spânu, A.; Stoenescu, F.; Lorenzi, M.; Avram, M. Analysis of three wheeled electric vehicle with increased stability on the road. In Proceedings of the 8th International Conference on Advanced Concepts in Mechanical Engineering ACME, Iasi, Romania, 7–8 June 2018. [Google Scholar]
- Ataei, M.; Khajepour, A.; Jeon, S. Development of a novel general reconfigurable vehicle dynamics model. Mech. Mach. Theory 2021, 156, 104147. [Google Scholar] [CrossRef]
- Kidane, S.; Rajamani, R.; Lee, A.; Starr, P.J.; Donath, M. Development and experimental evaluation of a tilt stability control system for narrow commuter vehicles. IEEE Trans. Control. Syst. Technol. 2010, 18, 1266–1279. [Google Scholar] [CrossRef]
- Sindha, J.; Chakraborty, B.; Chakravarty, D. Rigid body modelling of three-wheel vehicle to determine the dynamic stability—A practical approach. In Proceedings of the IEEE International Transportation Electrification Conference ITEC, Chennai, India, 27–29 August 2015. [Google Scholar]
- Barker, M.; Drew, B.; Darling, J.; Edge, K.A.; Owen, G.A. Steady-state steering of a tilting three-wheeled vehicle. Veh. Syst. Dyn. 2010, 48, 815–830. [Google Scholar] [CrossRef]
- Klimenda, F.; Soukup, J.; Skocilasova, B.; Skocilas, J. Vertical vibration of the vehicle when crossing over transverse speed bumps. Manuf. Technol. 2020, 20, 55–59. [Google Scholar] [CrossRef]
- Gerlici, J.; Shakno, V.; Yefymenko, A.; Verbitskii, V.; Kravchenko, A.; Kravchenko, K. The stability analysis of two-wheeled vehicle model. In Proceedings of the 22nd Slovak-Polish Scientific Conference on Machine Modelling and Simulations MMS, Sklene Teplice, Slovakia, 5–8 September 2017. [Google Scholar]
- Llopis-Castelló, D.; Camacho-Torregrosa, F.J.; García, A. Analysis of the influence of geometric design consistency on vehicle CO2 emissions. Transp. Res. Part D-Transp. Environ. 2019, 69, 40–50. [Google Scholar] [CrossRef]
- Shavelkin, A.; Gerlici, J.; Shvedchykova, I.O.; Kravchenko, K.; Kruhliak, H.V. Management of power consumption in a photovoltaic system with a storage battery connected to the network with multi-zone electricity pricing to supply the local facility own needs. Electr. Eng. Electromechanics 2021, 2, 36–42. [Google Scholar] [CrossRef]
- Sága, M.; Blatnický, M.; Vaško, M.; Dižo, J.; Kopas, P.; Gerlici, J. Experimental determination of the Manson-Coffin curves for an original unconventional vehicle frame. Materials 2020, 13, 4675. [Google Scholar] [CrossRef]
- Różyło, P. Passive safety of a buggy-type car in the aspect of a dynamic analysis of the frame. Acta Mech. Autom. 2019, 13, 75–79. [Google Scholar] [CrossRef]
- Cernohlavek, V.; Svoboda, M.; Sterba, J.; Chalupa, M.; Sapieta, M. Analytical and experimental solution of vibrations of a system of bound bodies. Manuf. Technol. 2020, 20, 699–707. [Google Scholar]
- Callens, A.; Bignonnet, A. Fatigue design of welded bicycle frames using a multiaxial criterion. Procedia Eng. 2012, 34, 640–645. [Google Scholar] [CrossRef]
- Palanivendhan, M.; Devanand, S.; Chandradass, J.; Philip, J.; Sajith Redd, S. Design and analysis of 3-wheeler chassis. Mater. Today Proc. 2021, 45, 6958–6968. [Google Scholar] [CrossRef]
- Xiu, R.; Spiryagin, M.; Wu, Q.; Yang, S.; Liu, Y. Fatigue life prediction for locomotive bogie frames using virtual prototype technique. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2021, 235, 1122–1131. [Google Scholar] [CrossRef]
- Sága, M.; Blatnická, M.; Blatnický, M.; Dižo, J.; Gerlici, J. Research of the fatigue life of welded joints of high strength steel S960 QL created using laser and electron beams. Materials 2020, 13, 2539. [Google Scholar] [CrossRef] [PubMed]
- Leitner, B.; Figuli, L. Fatique life prediciton of mechanical structures under stochastic loading. In Proceedings of the 22nd Slovak-Polish Scientific Conference on Machine Modelling and Simulation MMS, Sklene Teplice, Slovakia, 5–8 September 2017. [Google Scholar]
- Moravec, J.; Bury, P.; Cernobila, F. Investigation of forging metal specimens of different relative reductions using ultrasonig waves. Materials 2021, 14, 2406. [Google Scholar] [CrossRef]
- Ministry of Transport and Construction of the Slovak Republic. Available online: https://www.mindop.sk/en (accessed on 19 April 2023).
- Feynman, R.P.; Leighton, R.B.; Sands, M. Feynman’s Lectures on Physics. Available online: https://www.feynmanlectures.caltech.edu/ (accessed on 6 June 2023).
- Sága, M.; Vavro, J.; Kopecký, M. Computer Analysis and Synthesis of Mechanical Systems, 1st ed.; ZUSI: Žilina, Slovakia, 2002; pp. 198–250. (In Slovak) [Google Scholar]
- Dizo, J.; Barta, D.; Blatnicky, M. Improvement driving characteristics of electric tricycle. In Proceedings of the 17th International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 23–25 May 2018. [Google Scholar]
- Lin, C.-S.; Yu, C.-C.; Ciou, Y.-H.; Wu, Y.-X.; Hsu, C.-H.; Li, Y.-T. Design and analysis of a light electric vehicle. Mech. Sci. 2021, 12, 345–360. [Google Scholar] [CrossRef]
- Kobayashi, T.; Katsuyama, E.; Sugiura, H.; Ono, E.; Yamamoto, M. Efficient direct yaw moment control: Tire slip power loss minimization for a four-independent wheel-drive vehicle. Veh. Syst. Dyn. 2017, 56, 719–733. [Google Scholar] [CrossRef]
- Li, X.; Zhao, X.P.; Chen, J.; Men, J.L. Controller design for soft-disability remedy of the electric power steering system. Int. J. Automot. Technol. 2009, 10, 497–503. [Google Scholar] [CrossRef]
- Karolczuk, A.; Kurek, M.; Łagoda, T. Fatigue life of aluminium alloy 6082 T6 under constant and variable amplitude bending with torsion. J. Theor. Appl. Mech. 2015, 52, 421–430. [Google Scholar] [CrossRef]
- Fomin, O.; Gorbunov, M.; Lovska, A.; Gerlici, J.; Kravchenko, K. Dynamics and strength of circular tube open wagons with aluminum foam filled center sills. Materials 2021, 14, 1915. [Google Scholar] [CrossRef]
- Fomin, O.; Gorbunov, M.; Gerlici, J.; Vatulia, G.; Lovska, A.; Kravchenko, K. Research into the strength of an open wagon with double sidewalls filled with aluminium foam. Materials 2021, 14, 3420. [Google Scholar] [CrossRef]
- Gourdin, C.; Bradaï, S.; Courtin, S.; Le Roux, J.C.; Gardin, C. Equi-biaxial loading effect on austenitic stainless steel fatigue life. Frat. Ed Integrità Strutt. 2017, 38, 170–176. [Google Scholar] [CrossRef]
- Karamuk, M.; Alankus, O.B. Development and experimental implementation of active tilt control system using a servo motor actuator for narrow tilting electric vehicle. Energies 2022, 15, 1996. [Google Scholar] [CrossRef]
- Rodriguez-Licea, M.-A. On the tripped rollovers and lateral skid in three-wheeled vehicles and their mitigation. Vehicles 2021, 3, 375–376. [Google Scholar] [CrossRef]
- Azim, R.A.; Malik, F.M.; ul Haq Syed, W. Rollover mitigation controller development for three-wheeled vehicle using active front steering. Math. Probl. Eng. 2015, 2015, 918429. [Google Scholar] [CrossRef]
- Dandiwala, A.; Chakraborty, B.; Chakravarty, D.; Sindha, J. Vehicle dynamics and active rollover stability control of an electric narrow three-wheeled vehicle: A review and concern towards improvement. Veh. Syst. Dyn. 2022, 61, 399–422. [Google Scholar] [CrossRef]
- Rodríguez-Licea, M.A. Robust lateral and longitudinal stability control for delta three-wheeled vehicles with suspension system. Int. J. Veh. Des. 2022, 87, 49–72. [Google Scholar] [CrossRef]
- Antony, J.J.; Jayabal, K. Rollover dynamics of a narrow tilting three-wheeled vehicle. In Proceedings of the International Conference on Mechanical, Manufacturing, Modeling and Mechatronics, Kuala Lumpur, Malaysia, 27–29 February 2016. [Google Scholar]
- Ketemaw, D.; Seid, S. Design of a rollover index-based sliding mode controller for roll stability of three wheeled vehicles using rear differential braking. Front. Mech. Eng. 2022, 8, 1038289. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions of a Specimen | Unit | |
|---|---|---|
| Length | 150 | mm |
| Diameter | 10 | mm |
| Parameters of the torsion load | ||
| Synchronous servomotor SEW-EURODRIVE CFM71M | ||
| Max. static torque | 6.5 | Nm |
| Overload capacity | 3.3 | - |
| Revolutions | 0 to 6000 | min−1 |
| Max. loading frequency | 100 | Hz |
| Parameters of the bending load | ||
| Synchronous servomotor SEW-EURODRIVE CFM90S | ||
| Max. static moment | 11 | Nm |
| Overload capacity | 3.6 | - |
| Revolutions | 0 to 6000 | min−1 |
| Max. loading frequency | 100 | Hz |
| Loading method | Controlled deformation amplitude (Manson–Coffin) |
| Type of loading | Bending, torsion, and their combination |
| Deformation range in bending ε | 0 to 4.3∙10−3 (-) |
| Deformation range in torsion γ | 0 to 10∙10−3 (-) |
| Ranges of equivalent von Mises stress from Bending deformation for base material EN AW 6063 | 0 to 220 MPa |
| Ranges of equivalent von Mises stress from Bending deformation for welded material EN AW 6063 | 0 to 46 MPa |
| Ranges of equivalent von Mises stress from torsional deformation for base material EN AW 6063 | 0 to 91 MPa |
| Ranges of equivalent von Mises stress from torsional deformation for welded material EN AW 6063 | 0 to 32 MPa |
| Loading frequency | f = 30 Hz |
| Coefficient of cycle asymmetry R = −1 | R = −1 |
| Phase shift between loadings | φ = 0°, 90° |
| Parameter | Value | Unit |
|---|---|---|
| Vehicle base L | 1.300 | m |
| Rear wheel track width B | 0.727 | m |
| CoG from the front wheel lF | 0.850 | m |
| CoG above the road h | 0.5279 | m |
| Total weight mt | 281.5 | kg |
| Curb weight mc | 151.5 | kg |
| Max. weight of a passenger mp | 130 | kg |
| Element Size (mm) | |||||||
|---|---|---|---|---|---|---|---|
| 2 | 3.5 | 5 | 7 | 10 | 12 | ||
| Eigenfrequency (Hz) | 1st | 115.3982 | 117.0407 | 118.2500 | 120.4065 | 123.8831 | 125.0067 |
| 2nd | 116.4068 | 117.8287 | 118.9700 | 120.9625 | 124.0867 | 125.2183 | |
| 3rd | 195.5372 | 197.8613 | 199.6800 | 202.9454 | 208.1457 | 210.069 | |
| Curve Radius Rc (m) | Maximum Speed of a Conventional Vehicle (km/h) | Maximum Speed of the E3-kolka (km/h) | ||
|---|---|---|---|---|
| Analytically | SIMPACK | Analytically | SIMPACK | |
| 1.5 | 11.100 | 10.685 | 13.690 | 13.263 |
| 5 | 20.300 | 19.844 | 24.500 | 24.215 |
| 10 | 28.660 | 27.700 | 33.830 | 33.100 |
| 15 | 35.100 | 34.258 | 40.340 | 39.853 |
| 20 | 40.530 | 39.950 | 45.210 | 44.807 |
| 25 | 45.300 | 44.795 | 48.800 | 48.003 |
| 30 | 49.600 | 47.990 | 51.620 | 50.700 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blatnický, M.; Dižo, J.; Sága, M.; Molnár, D.; Slíva, A. Utilizing Dynamic Analysis in the Complex Design of an Unconventional Three-Wheeled Vehicle with Enhancing Cornering Safety. Machines 2023, 11, 842. https://doi.org/10.3390/machines11080842
Blatnický M, Dižo J, Sága M, Molnár D, Slíva A. Utilizing Dynamic Analysis in the Complex Design of an Unconventional Three-Wheeled Vehicle with Enhancing Cornering Safety. Machines. 2023; 11(8):842. https://doi.org/10.3390/machines11080842
Chicago/Turabian StyleBlatnický, Miroslav, Ján Dižo, Milan Sága, Denis Molnár, and Aleš Slíva. 2023. "Utilizing Dynamic Analysis in the Complex Design of an Unconventional Three-Wheeled Vehicle with Enhancing Cornering Safety" Machines 11, no. 8: 842. https://doi.org/10.3390/machines11080842