
The Characterization of Silicone-Tungsten-Based Composites as Flexible Gamma-Ray Shields


 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials Preparation
2.2. Characterization Method
3. Results
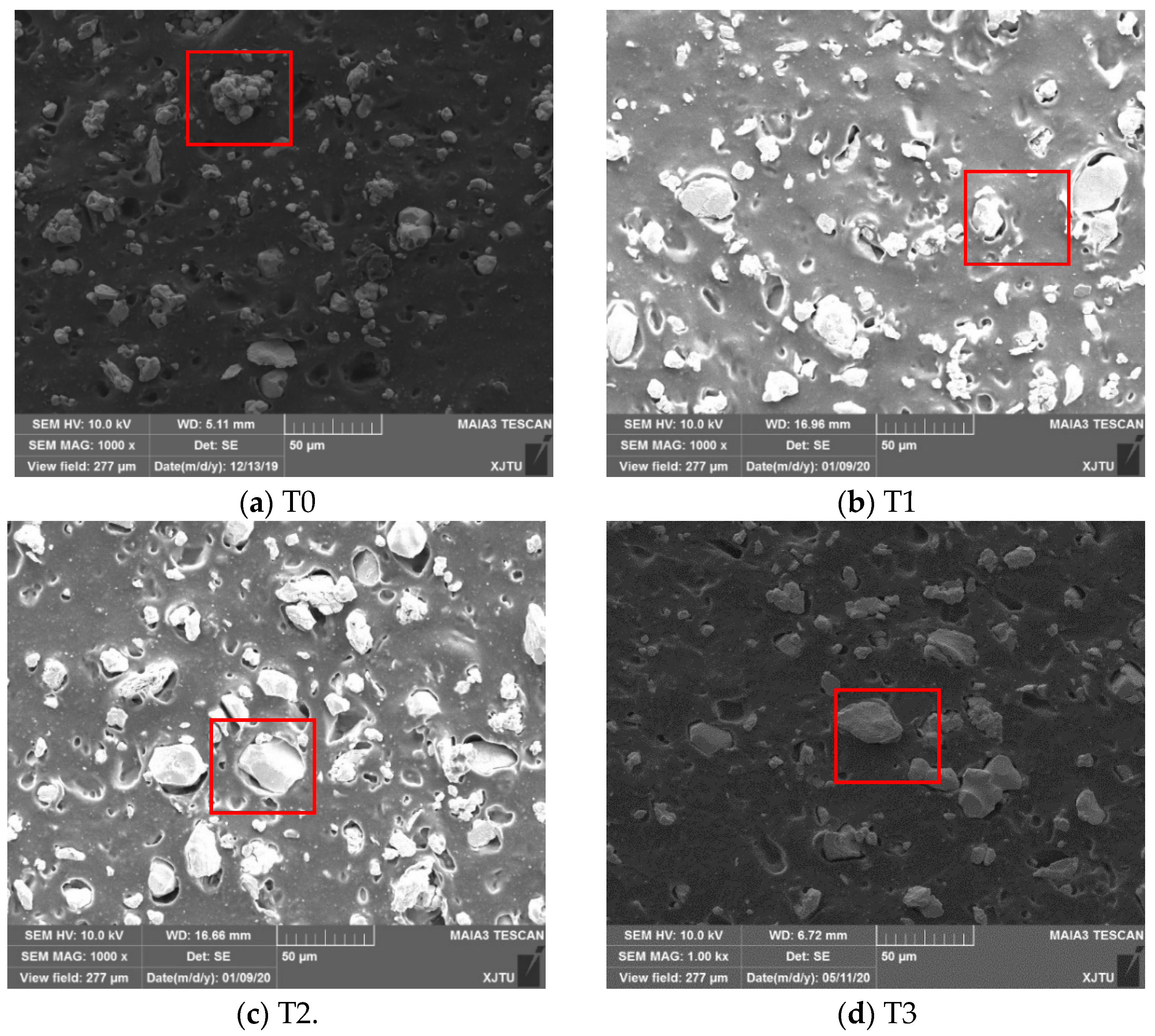
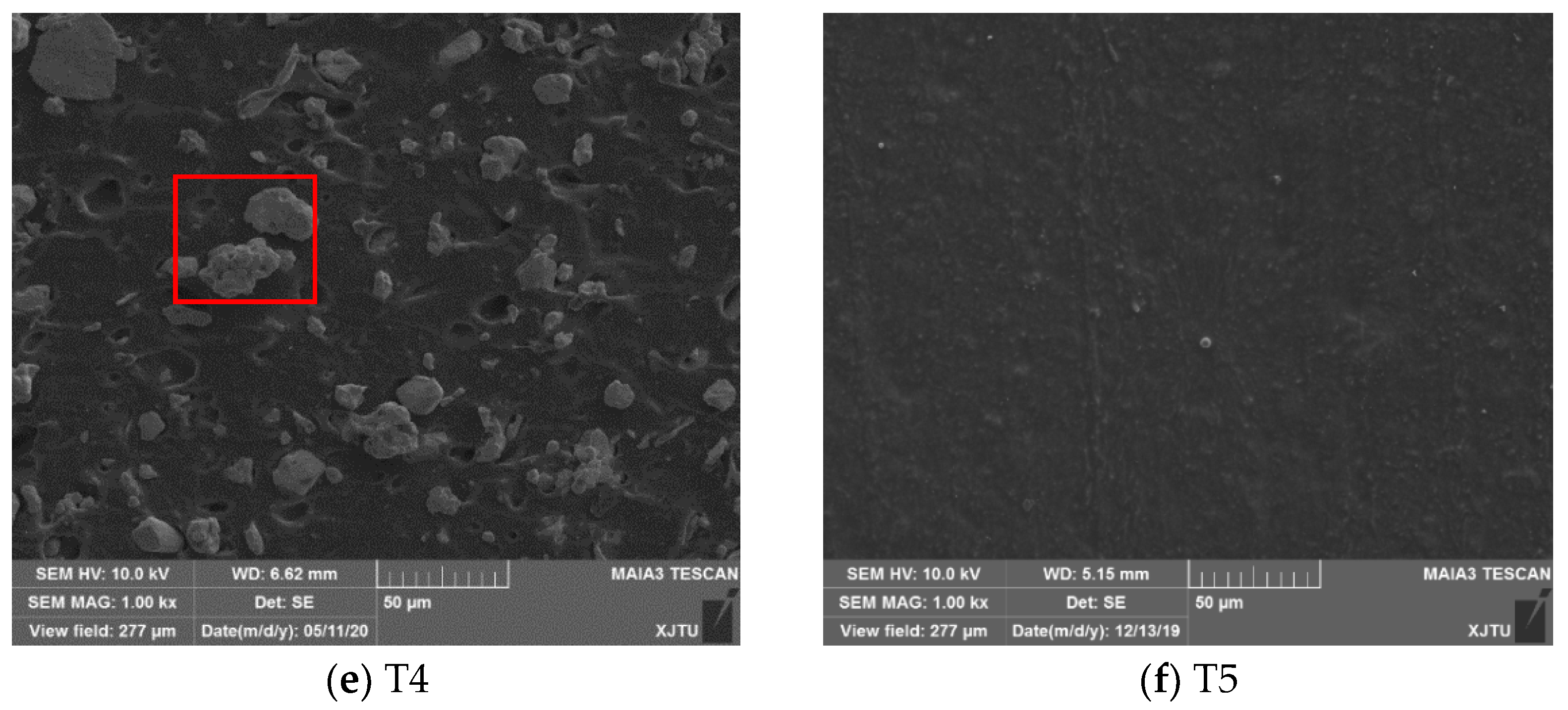
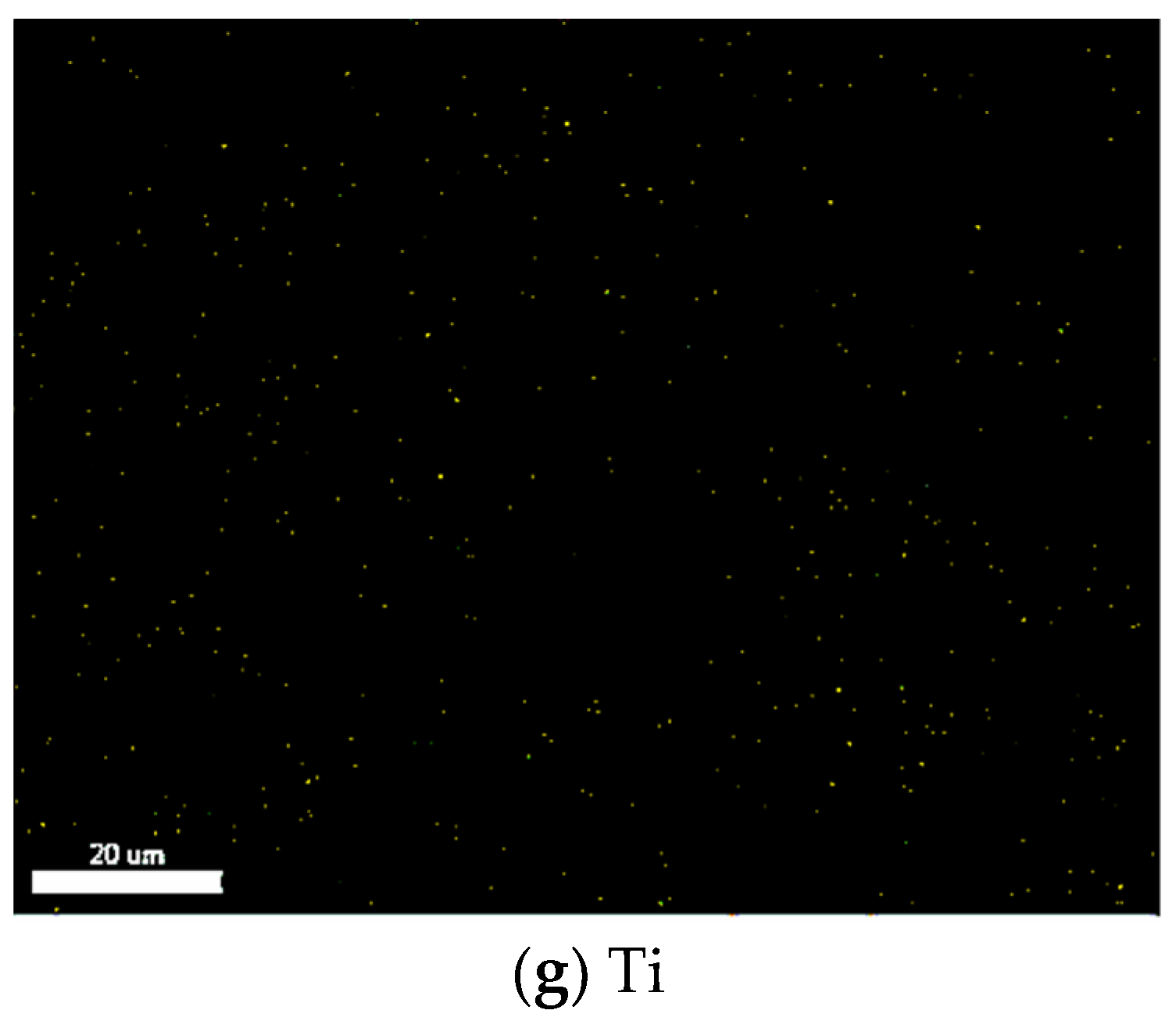
3.1. Surface Morphologies
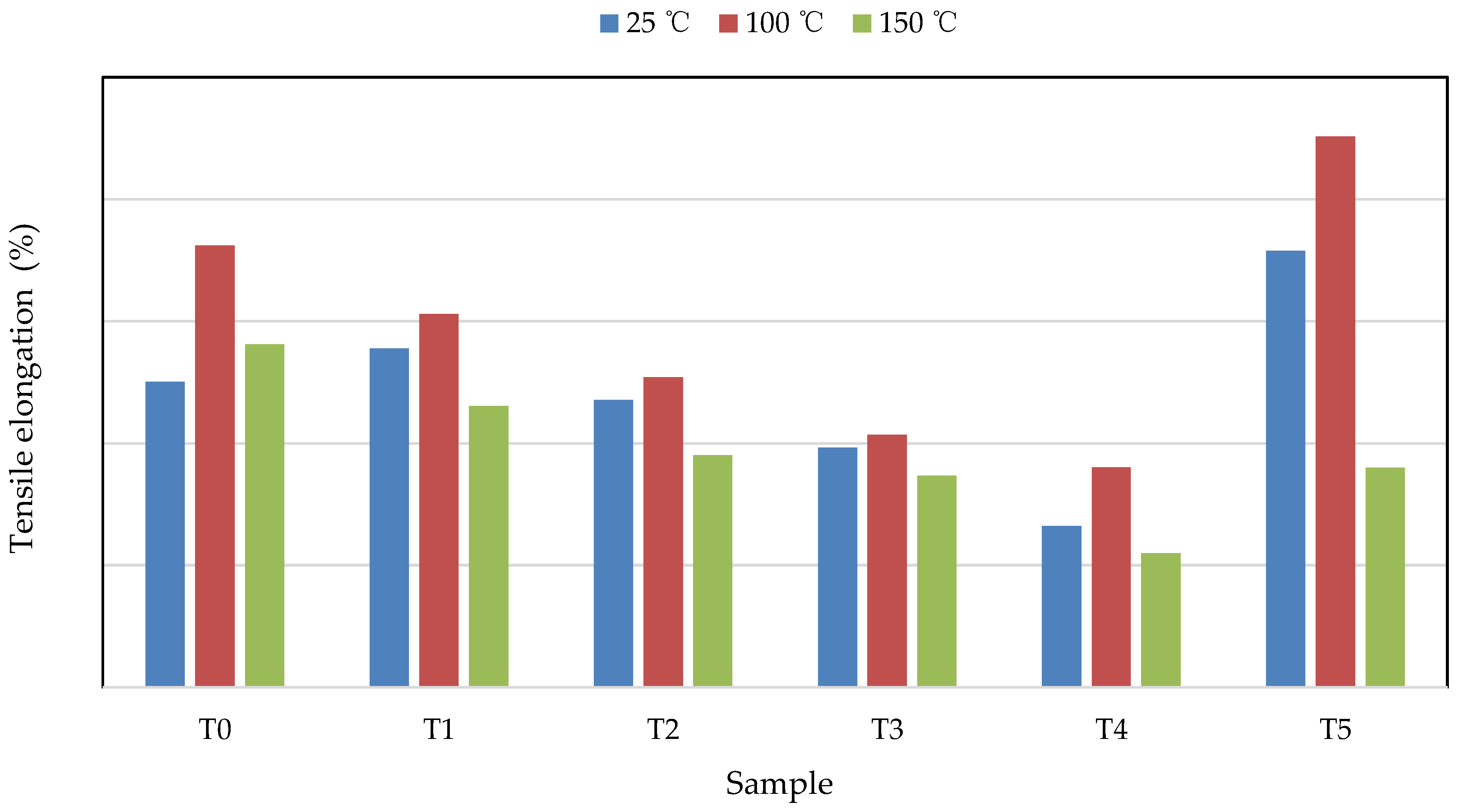
3.2. Tensile Property
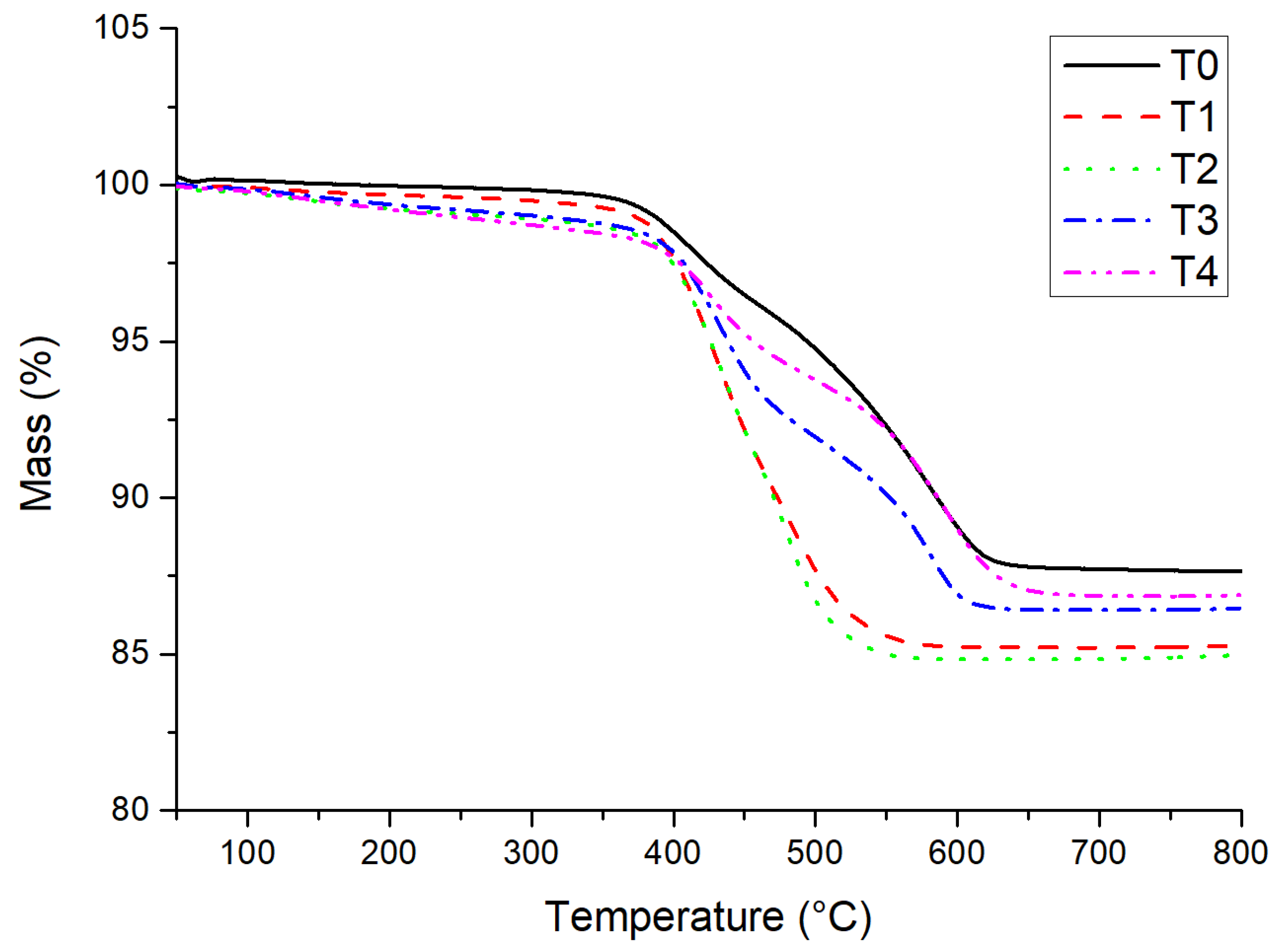
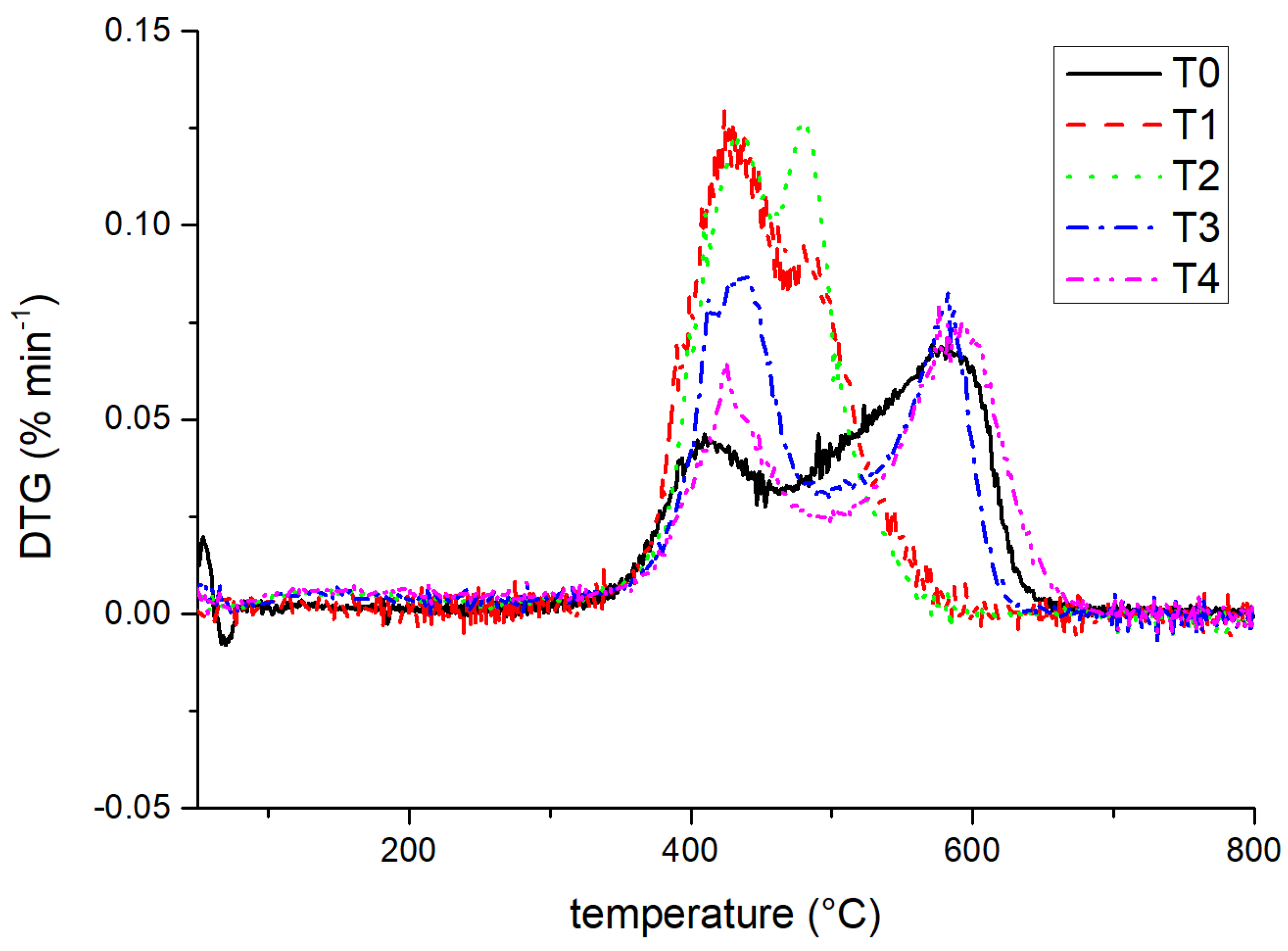
3.3. Thermogravimetric and Differential Scanning Calorimetry (TG-DSC)
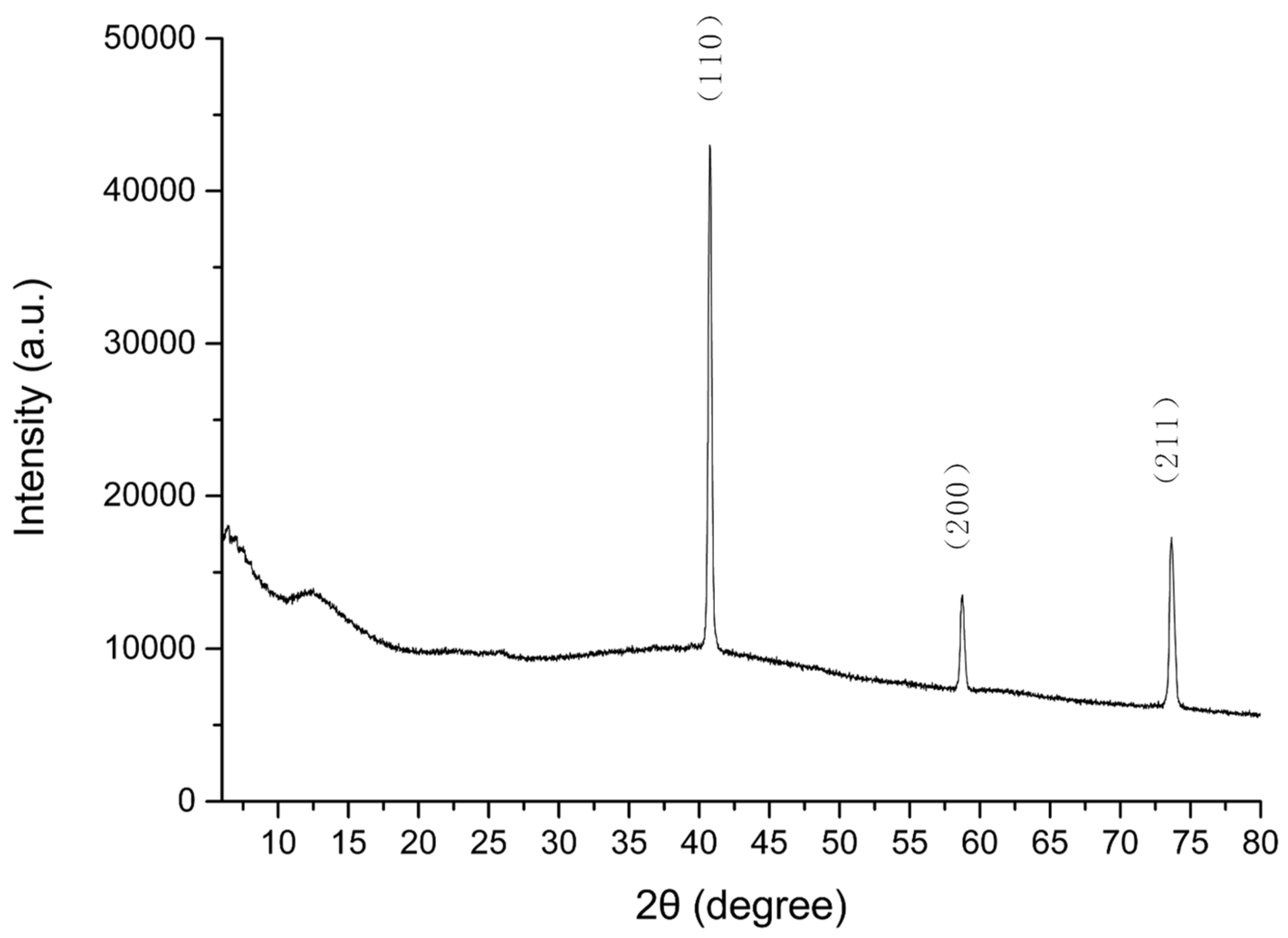
3.4. X-ray Diffraction (XRD)
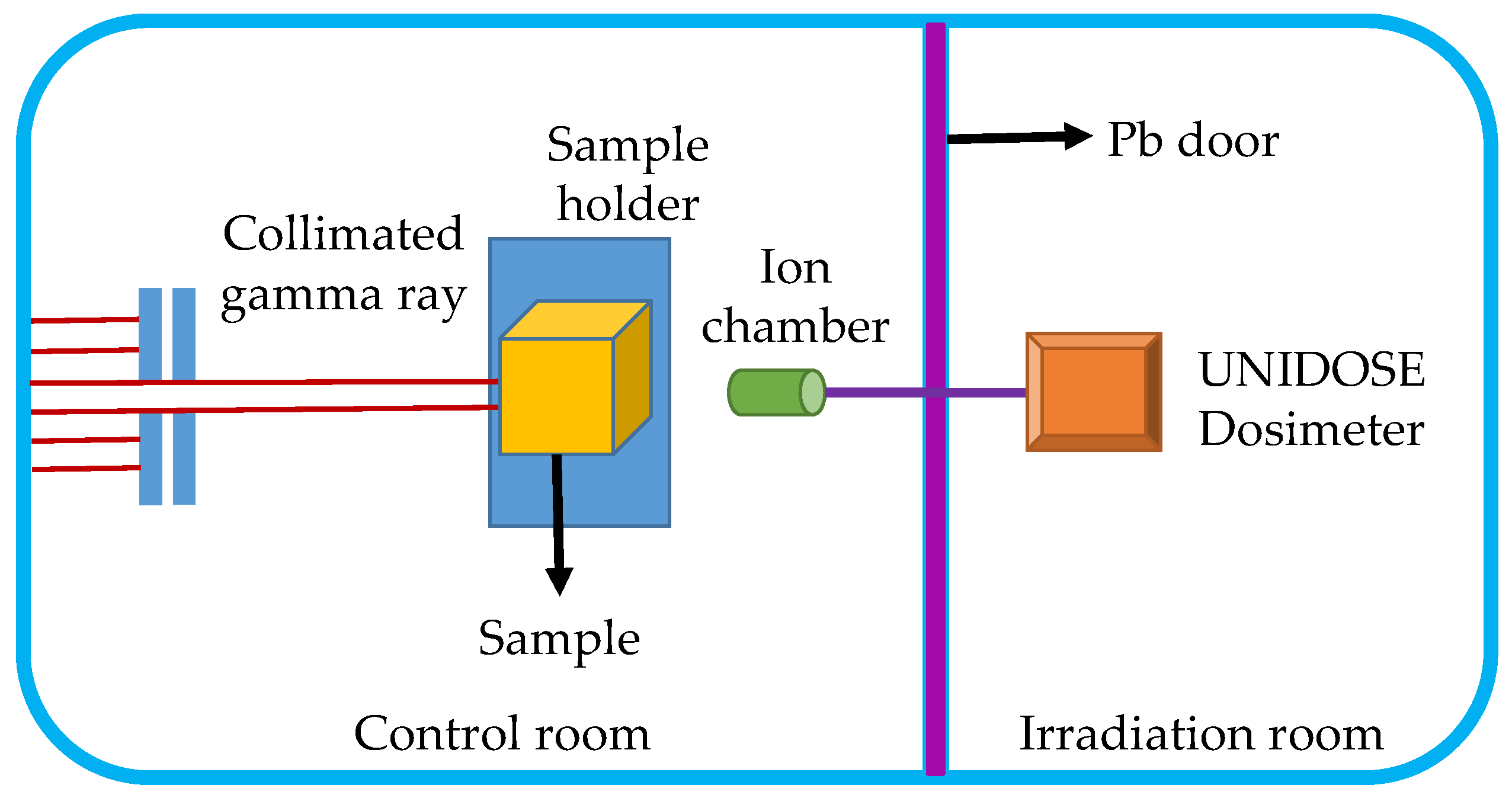
3.5. Gamma-Ray-Shielding Property
4. Conclusions
- (1)
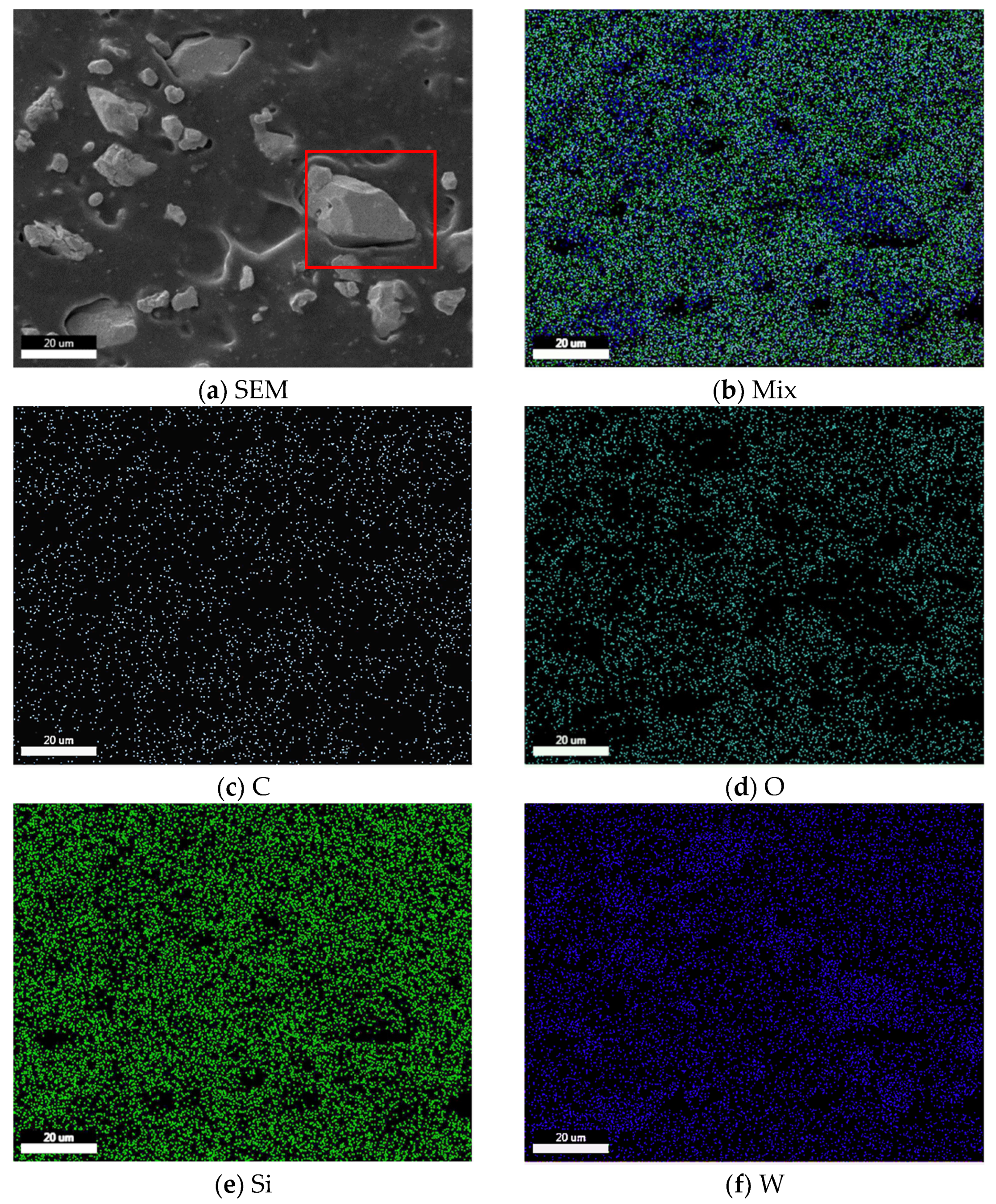
- According to the EDS elemental mapping results, the tungsten and nano TiO2 powder were observed in uniform dispersion in the silicone matrix.
- (2)
- With the addition of 0.1–2.0 wt.% nano TiO2, the total mass losses of the silicone-W-TiO2-based composite samples T1, T2, T3, and T4 increased slightly by about 0.80–2.81% compared to that of the silicone-W-based composite sample T0 in the temperature range of 30–800 °C. This demonstrates that the addition of nano TiO2 with the weight ratio of 0.1–2.0 wt.% has a slight impact on the thermal stability, compared to that of sample T0 containing 80 wt.% tungsten powders and 20 wt.% silicone.
- (3)
- The optimum improvement in tensile elongation property of the silicone-W-TiO2-based composites was achieved with 0.1 wt.% nano TiO2 powders, 79.9 wt.% tungsten powders, and 20 wt.% silicone.
- (4)
- The inclusion of 0.1–2.0 wt.% nano TiO2 powders resulted in a slight reduction in the gamma-ray linear attenuation coefficient by about 1.1–4.8% and the increase in tensile elongation by about 10.96% at 25 °C, compared with that of sample T0 (80 wt.% tungsten powders and 20 wt.% silicone).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Haddi, Y.; Kharchaf, A. Obstacle avoidance behavior of an autonomous mobile robot in a radioactive environment based on fuzzy logic. E3S Web Conf. 2021, 234, 00044. [Google Scholar] [CrossRef]
- Zhang, Z.; Fu, B.; Li, L.; Yang, E. Design and function realization of nuclear power inspection robot system. Robotica 2021, 39, 165–180. [Google Scholar]
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B.; Joyce, M.J. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energy 2019, 111, 109–124. [Google Scholar] [CrossRef]
- Bird, B.; Griffiths, A.; Martin, H.; Codres, E.; Jones, J.; Stancu, A.; Lennox, B.; Watson, S.; Poteau, X. A robot to monitor nuclear facilities: Using autonomous radiation-monitoring assistance to reduce risk and cost. IEEE Robot. Autom. Mag. 2018, 26, 35–43. [Google Scholar] [CrossRef]
- Kim, D.; Kim, Y.S.; Noh, K.; Jang, M.; Kim, S. Wall-climbing robot with active sealing for radiation safety of nuclear power plants. Nucl. Sci. Eng. 2020, 194, 1162–1174. [Google Scholar] [CrossRef]
- Sato, Y.; Tanifuji, Y.; Terasaka, Y.; Usami, H.; Kaburagi, M.; Torii, T. Radiation imaging using a compact Compton camera mounted on a crawler robot inside reactor buildings of Fukushima Daiichi Nuclear Power Station. J. Nucl. Sci. Technol. 2019, 56, 801–808. [Google Scholar] [CrossRef]
- Huang, C.-W.; Huang, C.-H.; Hung, Y.-H.; Chang, C.-Y. Sensing pipes of a nuclear power mechanism using low-cost snake robot. Adv. Mech. Eng. 2018, 10, 1–8. [Google Scholar] [CrossRef]
- Sundar, G.S.; Sivaramakrishnan, R.; Venugopal, S. Design and developments of inspection robots in nuclear environment: A review. Int. J. Mech. Eng. Rob. Res. 2012, 1, 400–409. [Google Scholar]
- Redus, R.; Squillante, M.; Gordon, J.; Knoll, G.; Wehe, D. A combined video and gamma ray imaging system for robots in nuclear environments. Nucl. Instrum. Meth. A 1994, 353, 324–327. [Google Scholar] [CrossRef] [Green Version]
- Bakari, M.J.; Zied, K.M.; Seward, D.W. Development of a multi-arm mobile robot for nuclear decommissioning tasks. Int. J. Adv. Robot. Syst. 2007, 4, 387–406. [Google Scholar] [CrossRef]
- Ducros, C.; Hauser, G.; Mahjoubi, N.; Girones, P.; Boisset, L.; Sorin, A.; Jonquet, E.; Falciola, J.M.; Benhamou, A. RICA: A tracked robot for sampling and radiological characterization in the nuclear field. J. Field Robot. 2017, 34, 583–599. [Google Scholar] [CrossRef] [Green Version]
- Youn, J.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K. Dielectric elastomer actuator for soft robotics applications and challenges. Appl. Sci. 2020, 10, 640. [Google Scholar] [CrossRef] [Green Version]
- Szliszka, E.; Czuba, Z.P.; Domino, M.; Mazur, B.; Zydowicz, G.; Krol, W. Ethanolic extract of propolis (EEP) enhances the apoptosis-inducing potential of TRAIL in cancer cells. Molecules 2009, 14, 738–754. [Google Scholar] [CrossRef]
- Khanbareh, H. Large area and flexible micro-porous piezoelectric materials for soft robotic skin. Sens. Actuators A Phys. 2017, 263, 554–562. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Vogt, D.M.; Rus, D.; Wood, R.J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 2017, 114, 13132–13137. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shimoga, G.; Choi, D.S.; Kim, S.Y. Bio-inspired soft robotics: Tunable photo-actuation behavior of azo chromophore containing liquid crystalline elastomers. Appl. Sci. 2021, 11, 1233. [Google Scholar] [CrossRef]
- Held, M.; Pichler, A.; Chabeda, J.; Lam, N.; Hernandez, G. Soft electronic platforms combining elastomeric stretchability and biodegradability. Adv. Sustain. Syst. 2021, 2100035. [Google Scholar] [CrossRef]
- Wang, J.; Zheng, T.; Gao, Y.; Wang, D.; Wang, C. Preparation and properties characterization of a novel soft robots partially made of silicone/W-based composites for gamma ray shielding. Prog. Nucl. Energy 2020, 130, 103531. [Google Scholar] [CrossRef]
- Jeong, J.; Yasir, I.B.; Han, J.; Park, C.H.; Kyung, K.U. Design of shape memory alloy-based soft wearable robot for assisting wrist motion. Appl. Sci. 2019, 9, 4025. [Google Scholar] [CrossRef] [Green Version]
- Allen, T.; Busby, J.; Meyer, M.; Petti, D. Materials challenges for nuclear systems. Mater. Today 2010, 13, 14–23. [Google Scholar] [CrossRef]
- Zinkle, S.J. Materials challenges in nuclear energy. Acta Mater. 2013, 61, 735–758. [Google Scholar] [CrossRef]
- Abouhaswa, A.S.; Abouhaswa, A.; Zakaly, H.; Issa, S.; Ahmed, M.R.; Yuness, M. Synthesis, physical, optical, mechanical, and radiation attenuation properties of TiO2–Na2O–Bi2O3–B2O3 glasses. Ceram. Int. 2021, 47, 185–204. [Google Scholar] [CrossRef]
- Nikbin, I.M.; Mehdipour, S.; Dezhampanah, S.; Mohammadi, R.; Sadrmomtazi, A. Effect of high temperature on mechanical and gamma ray shielding properties of concrete containing nano-TiO2. Radiat. Phys. Chem. 2020, 174, 108967. [Google Scholar] [CrossRef]
- Kilicoglu, O. Bioactive glasses with TiO2 additive: Behavior characterization against nuclear radiation and determination of buildup factors. Ceram. Int. 2020, 46, 10779–10787. [Google Scholar] [CrossRef]
- Al-Hadeethi, Y.; Sayyed, M.I.; Al-Buriahi, M.S. Bioactive glasses doped with TiO2 and their potential use in radiation shielding applications. Ceram. Int. 2020, 46, 14721–14732. [Google Scholar] [CrossRef]
- Ndong, R.S.; Russel, W.B. Effects of molecular weight and volume fraction on rheological properties of PDMS-grafted alumina in PDMS melts. J. Rheol. 2011, 55, 331–351. [Google Scholar] [CrossRef]
- Yao, Y.; Lu, G.Q.; Boroyevich, D.; Ngo, K. Effect of Al2O3 fibers on the high-temperature stability of silicone elastomer. Polymer 2014, 55, 4232–4240. [Google Scholar] [CrossRef]
- Ryu, T.; Hwang, K.S.; Choi, Y.J.; Hong, Y.S. The sintering behavior of nanosized tungsten powder prepared by a plasma process. Int. J. Refract. Met. Hard Mater. 2009, 27, 701–704. [Google Scholar] [CrossRef]
- Ryu, T.; Sohn, H.Y.; Hwang, K.S.; Fang, Z.Z. Chemical vapor synthesis (CVS) of tungsten nanopowder in a thermal plasma reactor. Int. J. Refract. Met. Hard Mater. 2009, 27, 149–154. [Google Scholar] [CrossRef]
- Zhang, D.; Cai, Q.; Liu, J. Formation of nanocrystalline tungsten by selective laser melting of tungsten powder. Mater. Manuf. Process. 2012, 27, 1267–1270. [Google Scholar] [CrossRef]
- Almurayshid, M.; Alssalim, Y.; Aksouh, F.; Almsalam, R.; ALQahtani, M.; Sayyed, M.I.; Almasoud, F. Development of new lead-free composite materials as potential radiation shields. Materials 2021, 14, 4957. [Google Scholar] [CrossRef] [PubMed]
- Mheemeed, A.; Hasan, H.; Al-Jomaily, F. Gamma-ray absorption using rubber—lead mixtures as radiation protection shields. J. Radioanal. Nucl. Chem. 2012, 291, 653–659. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | Silicone (wt.%) | Tungsten (wt.%) | Nano TiO2 (wt.%) | Density (g cm−3) | Tensile Elongation at 25 °C (%) | Tensile Elongation at 100 °C (%) | Tensile Elongation at 150 °C (%) |
|---|---|---|---|---|---|---|---|
| T0 | 20.0 | 80.0 | 0 | 4.513 | 500.84 | 724.5 | 561.97 |
| T1 | 20.0 | 79.9 | 0.1 | 4.498 | 555.75 | 612.34 | 460.72 |
| T2 | 20.0 | 79.5 | 0.5 | 4.490 | 471.24 | 508.92 | 380.58 |
| T3 | 20.0 | 79.0 | 1.0 | 4.455 | 392.52 | 414.17 | 347.05 |
| T4 | 20.0 | 78.0 | 2.0 | 4.378 | 264.51 | 360.65 | 219.72 |
| T5 | 100.0 | 0 | 0 | 1.116 | 715.20 | 803.00 | 360.00 |
| Sample | 30–200 °C (%) | 200–300 °C (%) | 300–400 °C (%) | 400–500 °C (%) | 500–600 °C (%) | 600–700 °C (%) | 700–800 °C (%) | Total Mass Loss (%) |
|---|---|---|---|---|---|---|---|---|
| T0 | 0.0256 | 0.1481 | 0.3559 | 3.7469 | 5.7134 | 1.2906 | 0.0761 | 12.3566 |
| T1 | 0.3269 | 0.1829 | 1.8357 | 9.9686 | 2.4380 | 0.0269 | 0.0031 | 14.7934 |
| T2 | 0.7938 | 0.2863 | 1.4330 | 10.7105 | 1.9411 | 0.0018 | 0.0077 | 15.1661 |
| T3 | 0.6259 | 0.3548 | 1.1297 | 5.9212 | 5.0065 | 0.5564 | 0.0049 | 13.5992 |
| T4 | 0.7879 | 0.4971 | 1.2850 | 3.8897 | 4.7179 | 2.2010 | 0.0193 | 13.1538 |
| Sample | Silicone (wt.%) | Tungsten (wt.%) | Nano TiO2 (wt.%) | Linear Attenuation Coefficient (cm−1) | Mass Attenuation Coefficient (cm2 g−1) | HVL (cm) | MFP (cm) |
|---|---|---|---|---|---|---|---|
| T0 | 20.0 | 80.0 | 0 | 0.2064 | 0.0457 | 3.3576 | 4.8450 |
| T1 | 20.0 | 79.9 | 0.1 | 0.1963 | 0.0436 | 3.5429 | 5.0942 |
| T2 | 20.0 | 79.5 | 0.5 | 0.1956 | 0.0435 | 3.5429 | 5.1125 |
| T3 | 20.0 | 79.0 | 1.0 | 0.2034 | 0.0457 | 3.4071 | 4.9164 |
| T4 | 20.0 | 78.0 | 2.0 | 0.1980 | 0.0452 | 3.5000 | 5.0505 |
| T5 | 100.0 | 0 | 0 | 0.0517 | 0.0463 | 13.4043 | 19.3424 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Zhou, H.; Gao, Y.; Xie, Y.; Zhang, J.; Hu, Y.; Wang, D.; You, Z.; Wang, S.; Li, H.; et al. The Characterization of Silicone-Tungsten-Based Composites as Flexible Gamma-Ray Shields. Materials 2021, 14, 5970. https://doi.org/10.3390/ma14205970
Wang J, Zhou H, Gao Y, Xie Y, Zhang J, Hu Y, Wang D, You Z, Wang S, Li H, et al. The Characterization of Silicone-Tungsten-Based Composites as Flexible Gamma-Ray Shields. Materials. 2021; 14(20):5970. https://doi.org/10.3390/ma14205970
Chicago/Turabian StyleWang, Jie, Haoyu Zhou, Yong Gao, Yupeng Xie, Jing Zhang, Yaocheng Hu, Dengwang Wang, Zhiming You, Sheng Wang, Haipeng Li, and et al. 2021. "The Characterization of Silicone-Tungsten-Based Composites as Flexible Gamma-Ray Shields" Materials 14, no. 20: 5970. https://doi.org/10.3390/ma14205970