
A Multi-Objective Optimization Method for Maritime Search and Rescue Resource Allocation: An Application to the South China Sea
Abstract
:1. Introduction
2. Literature Review
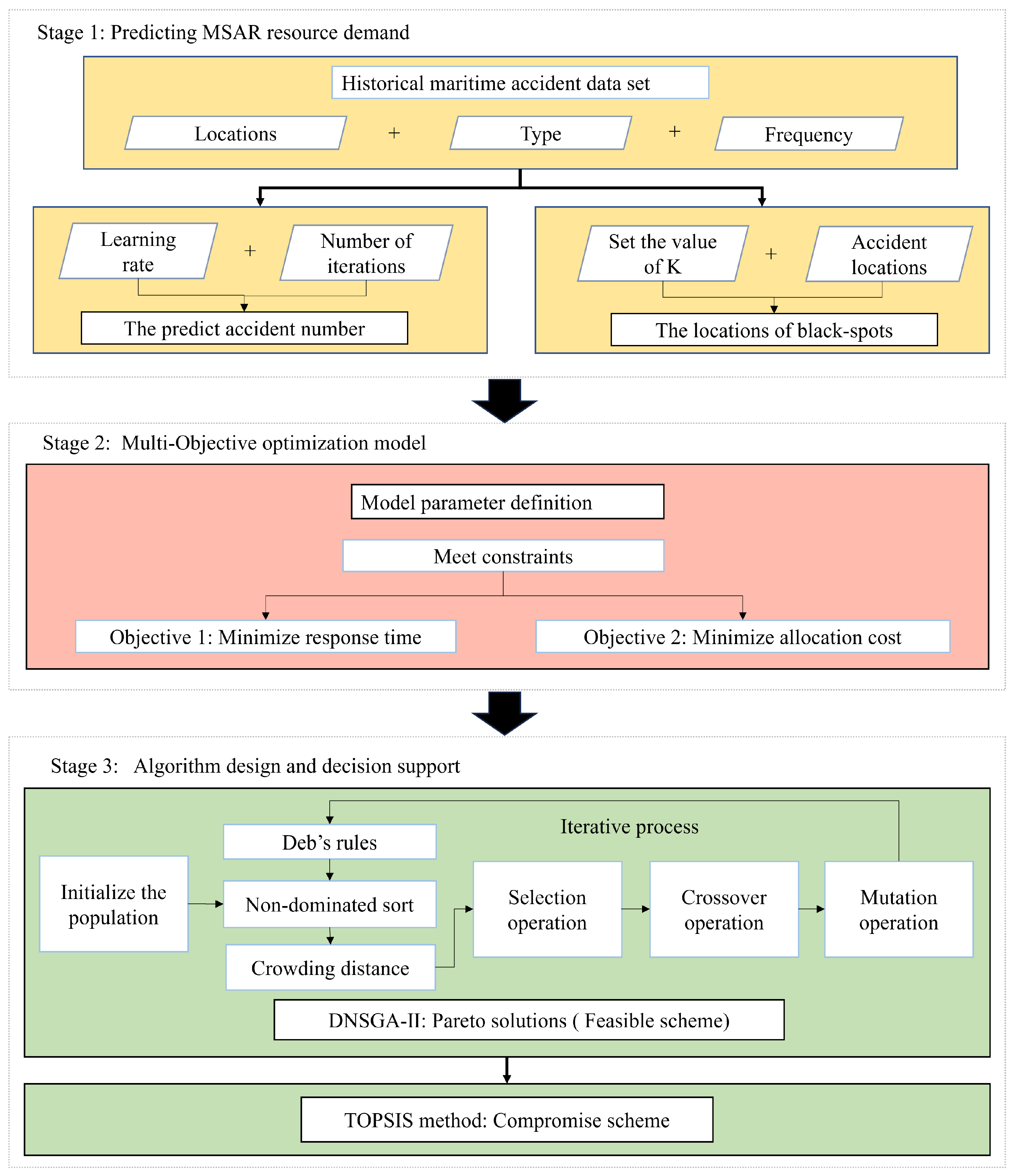
3. Model and Methods
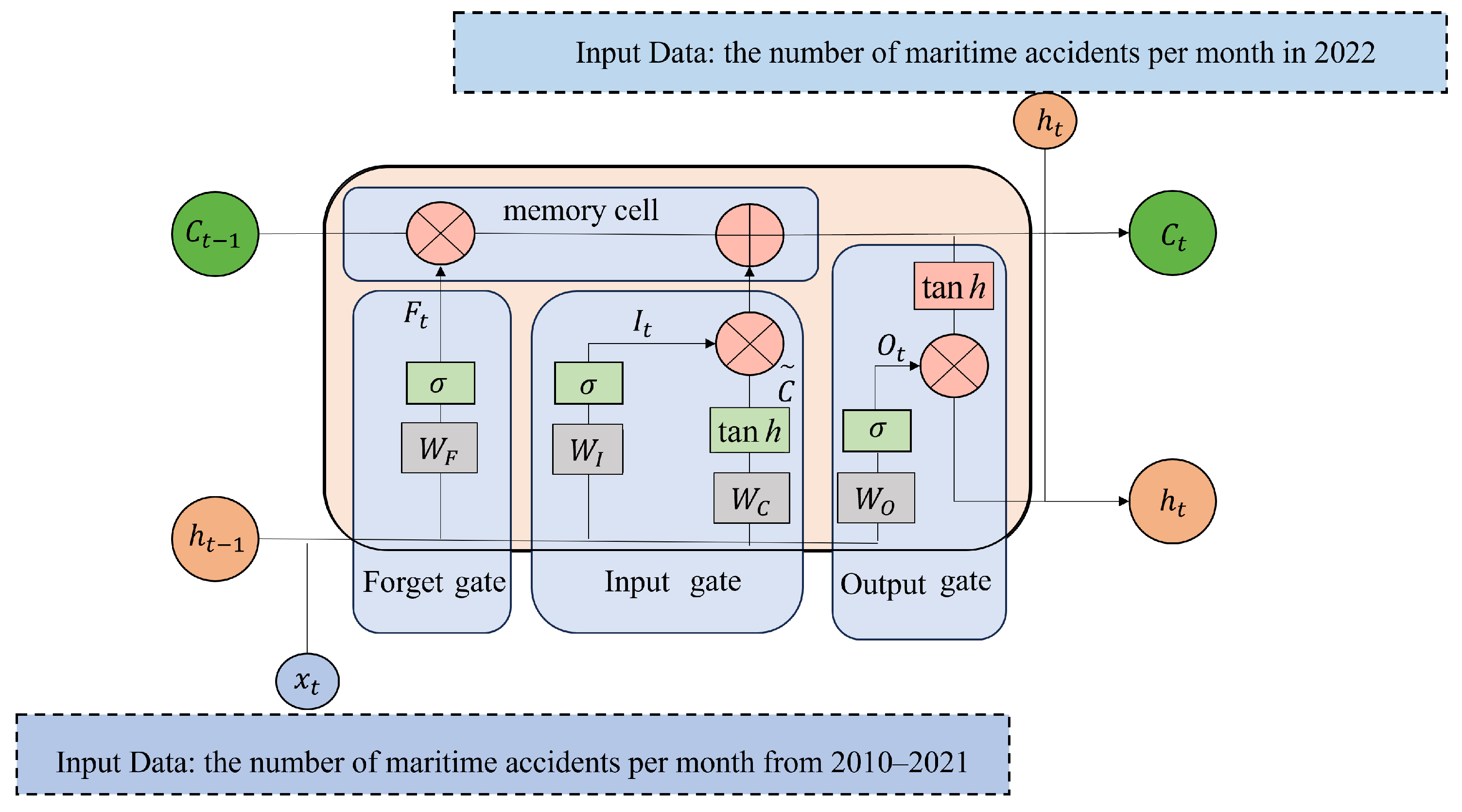
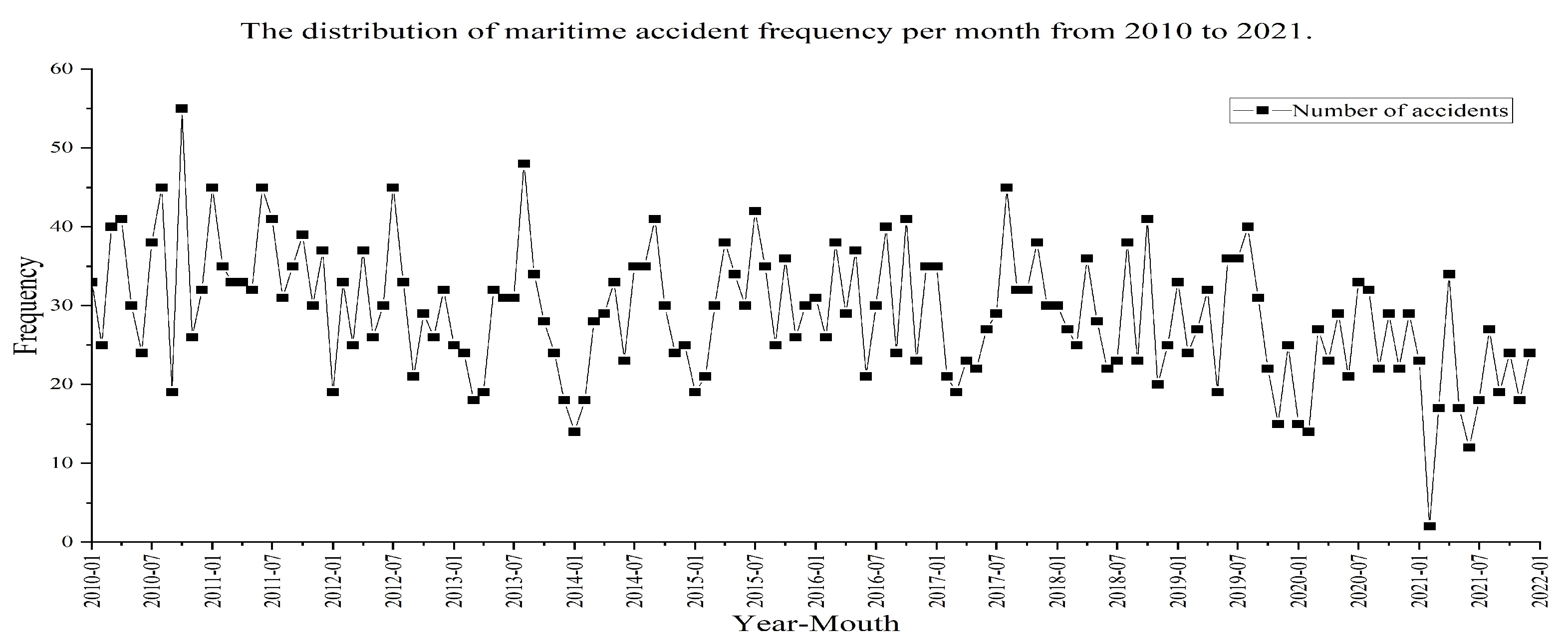
3.1. Prediction of Demand for MSAR Resources
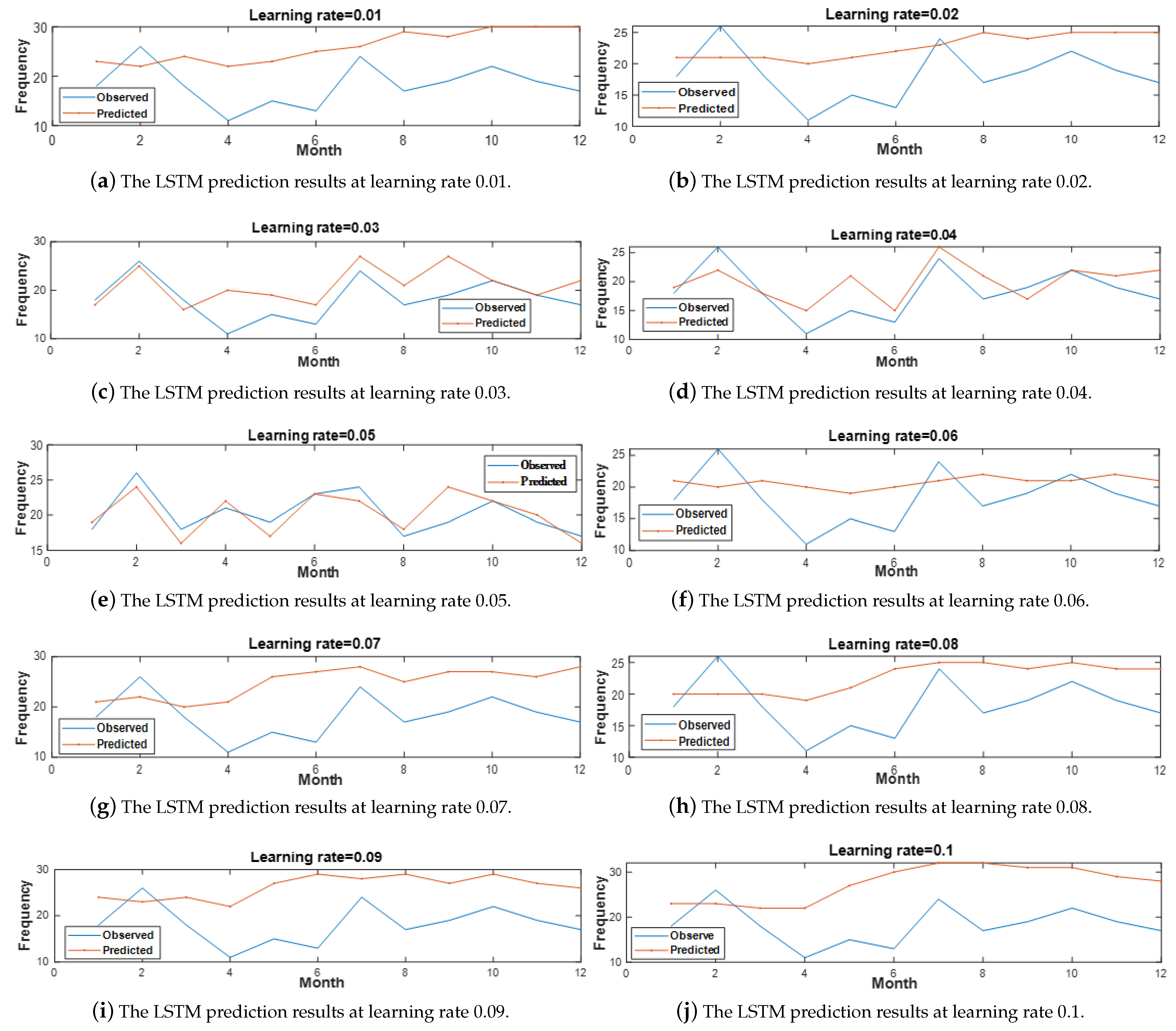
3.1.1. LSTM
3.1.2. K-Medoids
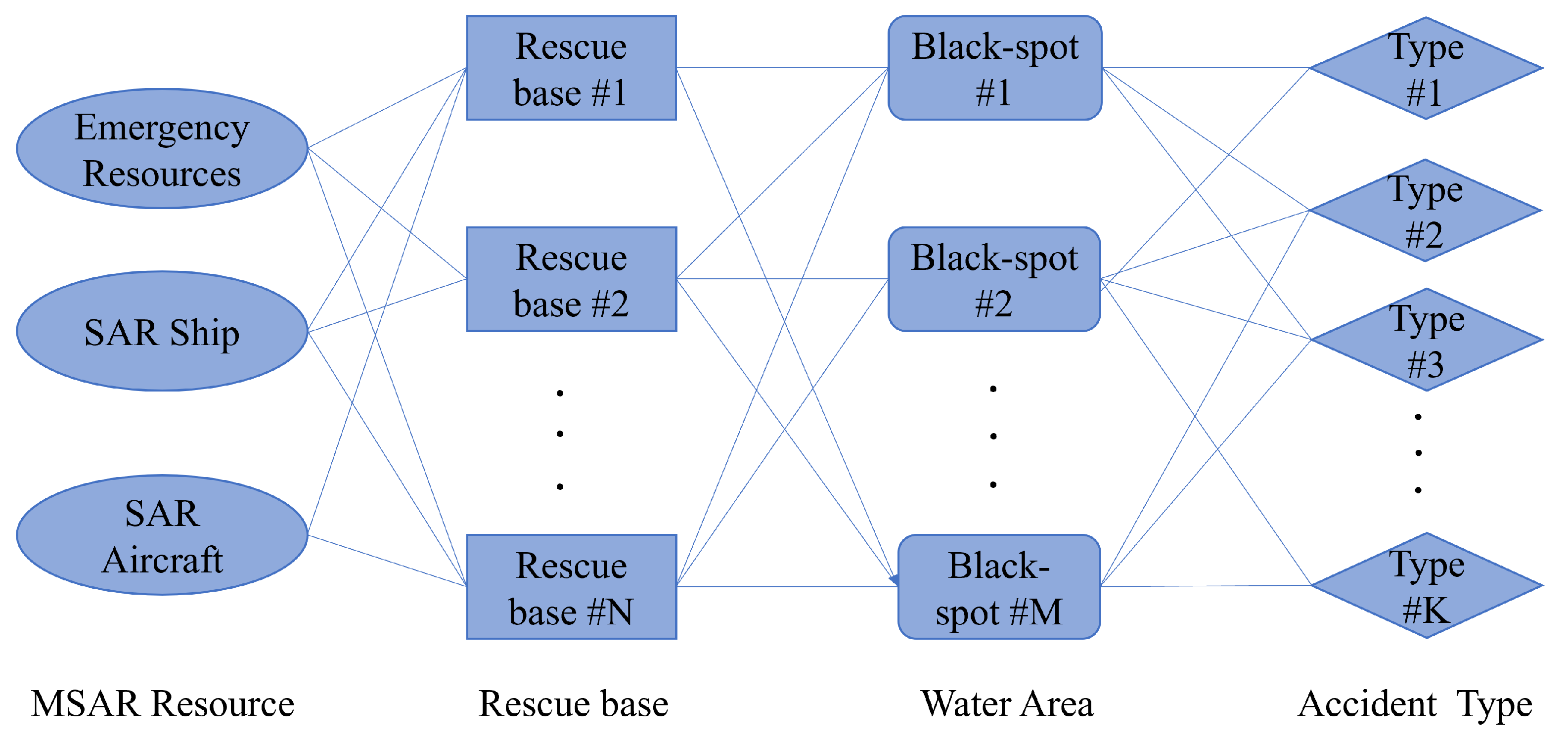
3.2. Multi-Objective Optimization Model
3.2.1. Problem Description
- (1)
- Rescue bases are not allowed to borrow rescue resources from each other.
- (2)
- Rescue aircraft and ships must depart from their respective rescue bases to carry out rescue missions. To ensure the effectiveness of the model, we consider the worst-case scenario where there is no available rescue equipment near the accident black spot.
- (3)
- Rescue ships and aircraft do not experience malfunctions during rescue missions.
- (4)
- The rescue mission cannot be interrupted by unexpected factors such as adverse weather conditions or successful self-rescue.
3.2.2. Notations and Definitions
3.2.3. Objective Functions and Constraints of the Multi-Objective Model
3.3. Algorithm Design and Decision Support
3.3.1. DNSGA-II
3.3.2. Multi-Attribute Decision Optimization-Based Method
4. An Application of the Proposed Methodology
4.1. Prediction of MSAR Resources
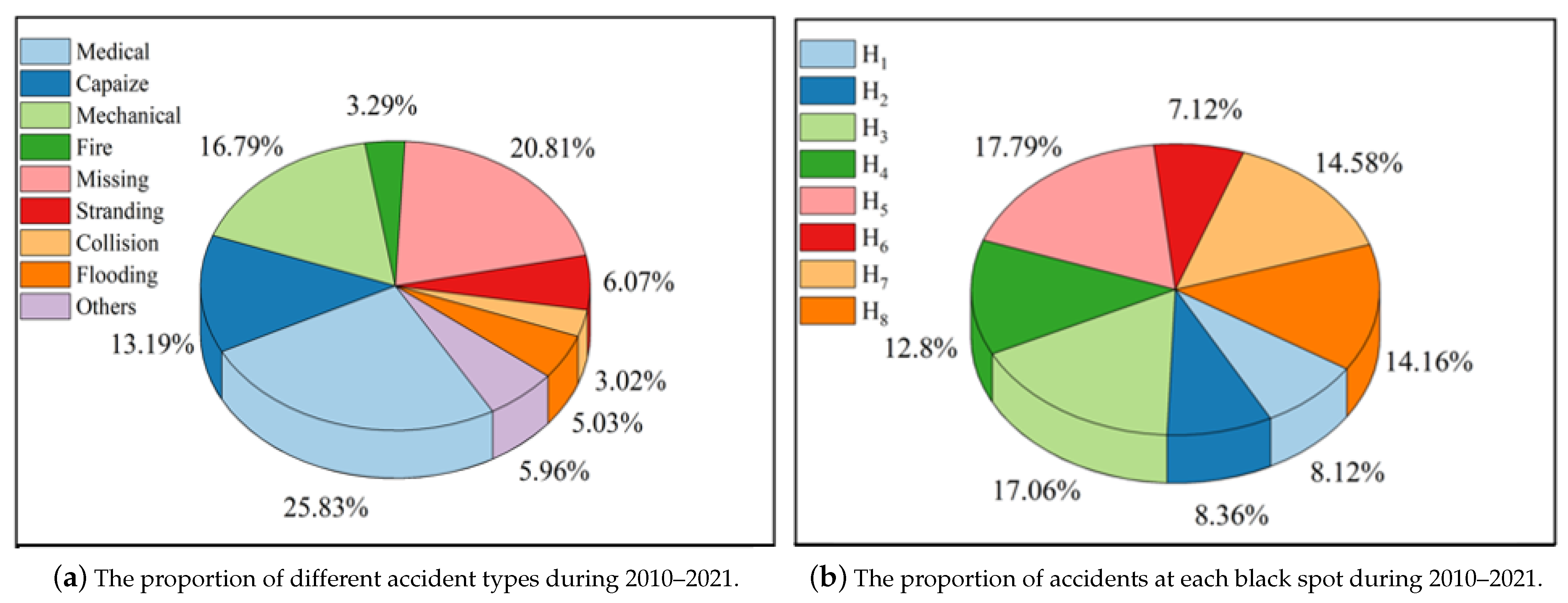
4.1.1. Maritime Accident Prediction
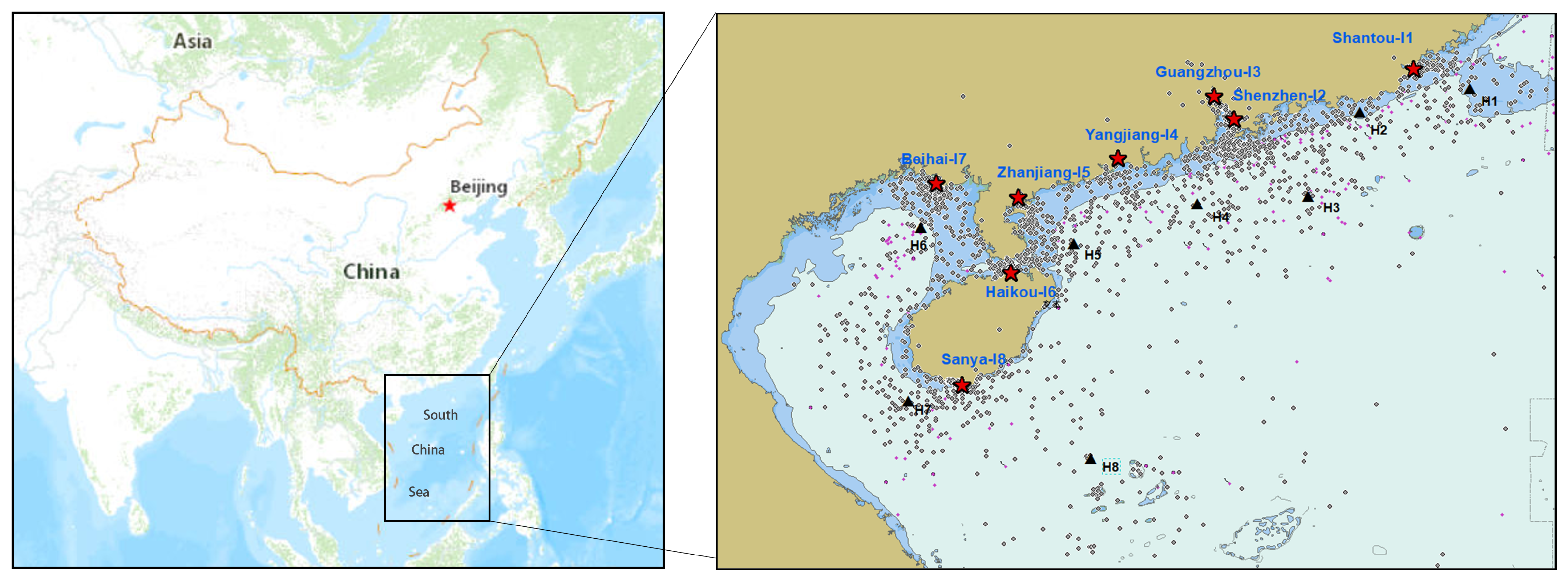
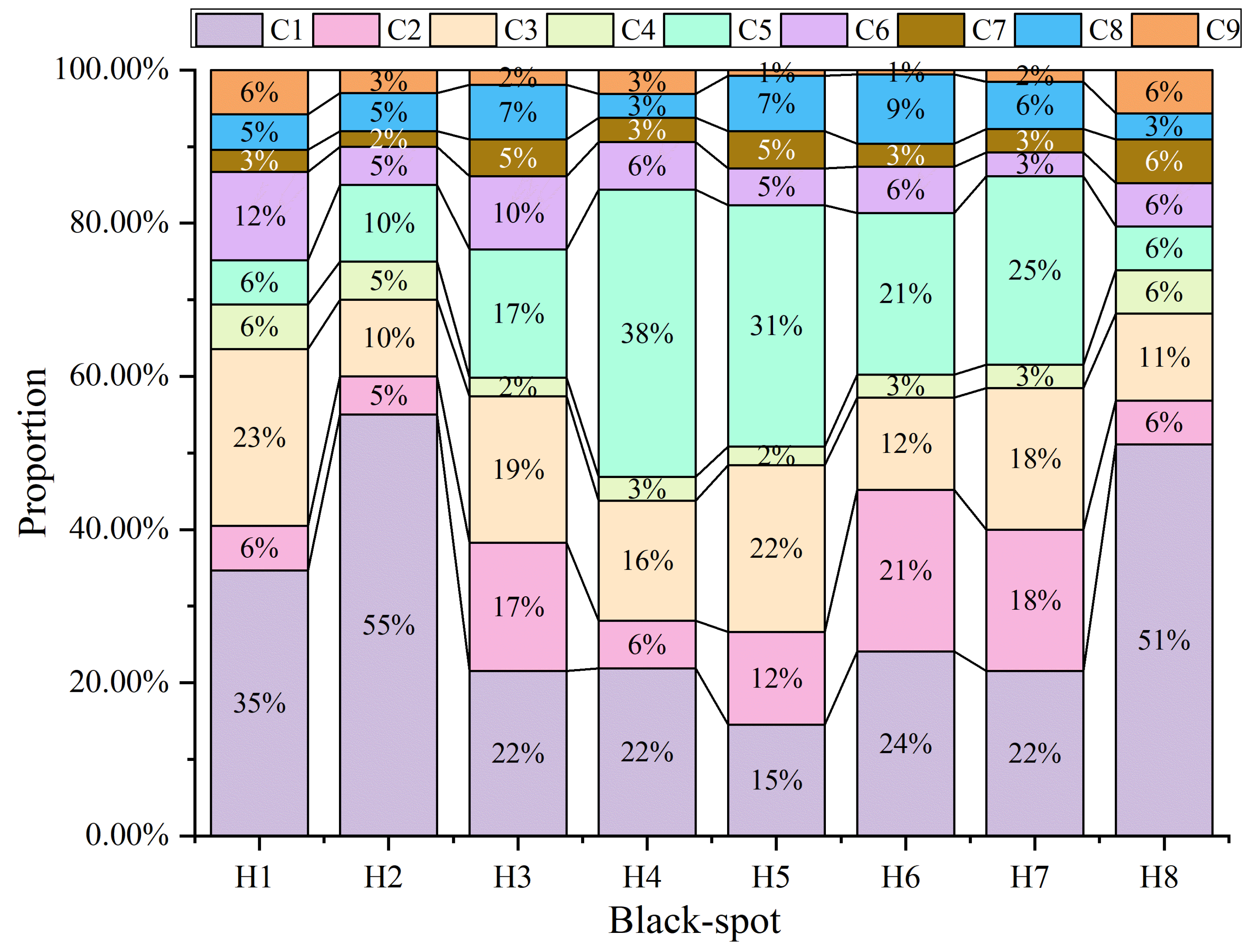
4.1.2. Identification of Maritime Accident Black Spots
4.2. MSAR Resource Allocation Optimization
4.2.1. Test Case
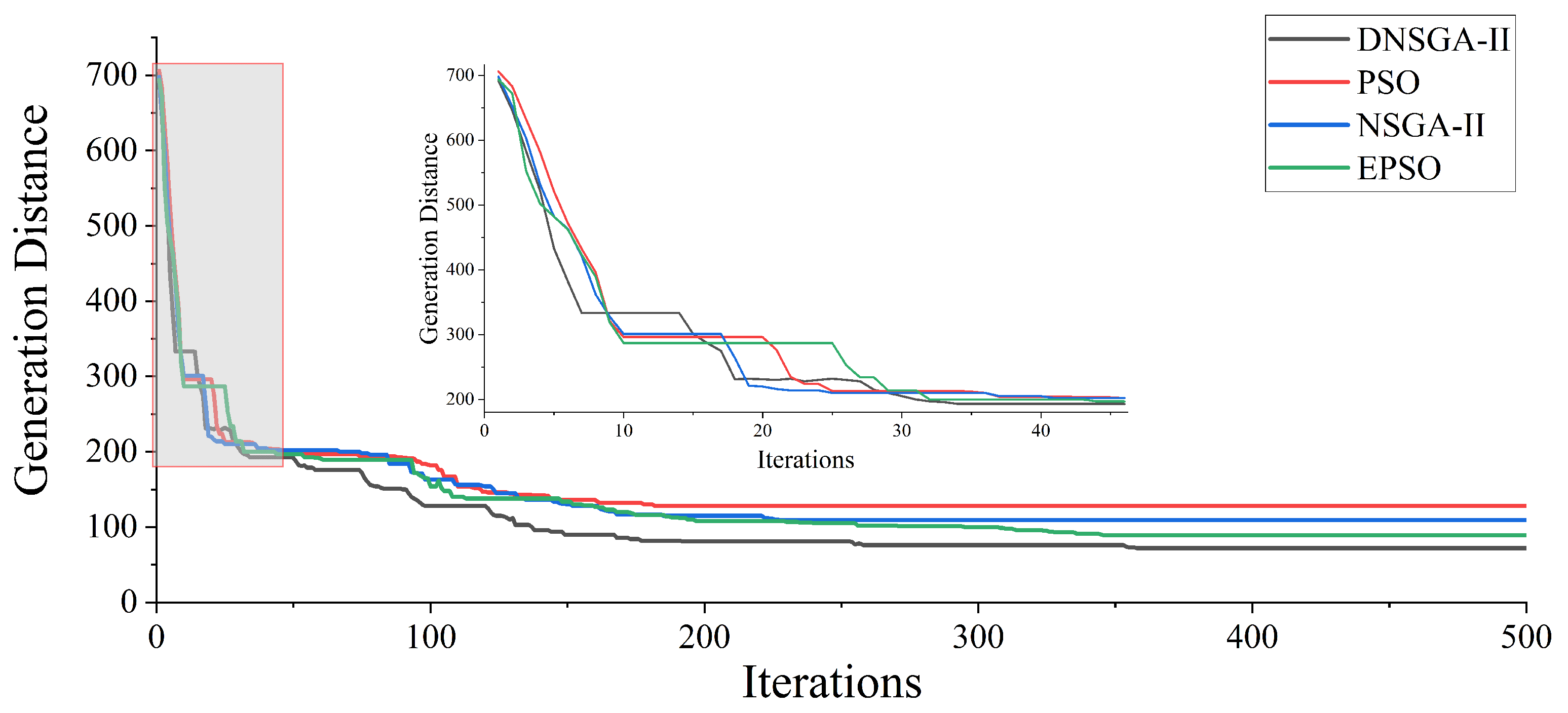
4.2.2. Performance Evaluation
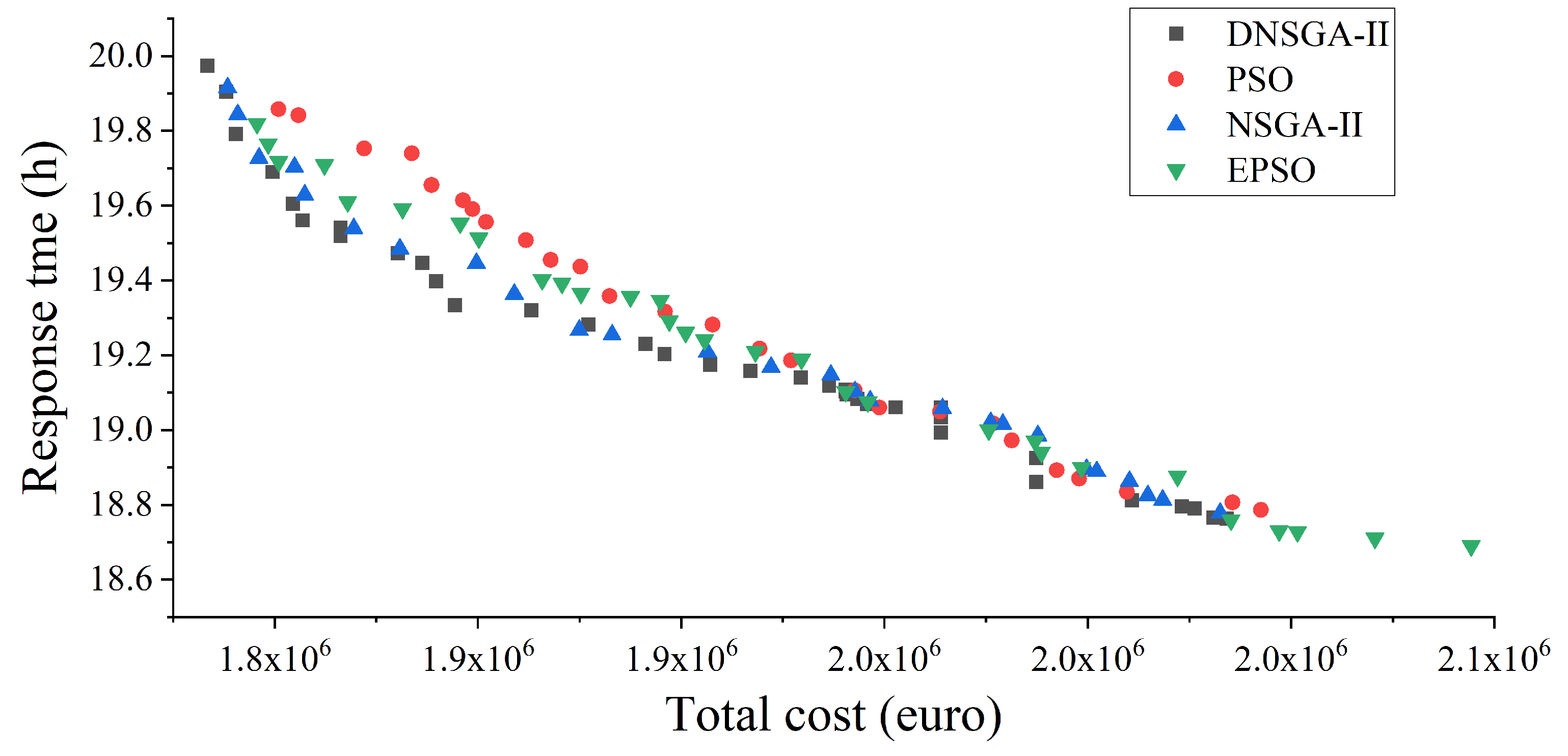
4.2.3. Computation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baksh, A.A.; Abbassi, R.; Garaniya, V.; Khan, F. Marine transportation risk assessment using Bayesian Network: Application to Arctic waters. Ocean Eng. 2018, 159, 422–436. [Google Scholar] [CrossRef]
- Knapp, S.; Heij, C. Evaluation of total risk exposure and insurance premiums in the maritime industry. Transp. Res. Part D Transp. Environ. 2017, 54, 321–334. [Google Scholar] [CrossRef]
- Serra, M.; Sathe, P.; Rypina, I.; Kirincich, A.; Ross, S.D.; Lermusiaux, P.; Allen, A.; Peacock, T.; Haller, G. Search and rescue at sea aided by hidden flow structures. Nat. Commun. 2020, 11, 2525. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Di, Z.; Shi, J.; Shu, Y.; Wan, Z.; Song, L.; Zhang, W. Marine oil spill pollution causes and governance: A case study of Sanchi tanker collision and explosion. J. Clean. Prod. 2020, 273, 122978. [Google Scholar] [CrossRef]
- Karatas, M. A dynamic multi-objective location-allocation model for search and rescue assets. Eur. J. Oper. Res. 2021, 288, 620–633. [Google Scholar] [CrossRef]
- Tu, H.; Xia, K.; Mu, L.; Chen, X.; Wang, X. Predicting drift characteristics of life rafts: Case study of field experiments in the South China Sea. Ocean Eng. 2022, 262, 112–158. [Google Scholar] [CrossRef]
- Cucco, A.; Quattrocchi, G.; Satta, A.; Antognarelli, F.; De Biasio, F.; Cadau, E.; Umgiesser, G.; Zecchetto, S. Predictability of wind-induced sea surface transport in coastal areas. J. Geophys. Res. Ocean. 2016, 121, 5847–5871. [Google Scholar] [CrossRef]
- Vidan, P.; Hasanspahić, N.; Grbić, T. Comparative analysis of renowned softwares for search and rescue operations. Naše More Znan. časopis Za More I Pomor. 2016, 63, 73–80. [Google Scholar] [CrossRef]
- Xiong, W.; Van Gelder, P.; Yang, K. A decision support method for design and operationalization of search and rescue in maritime emergency. Ocean Eng. 2020, 207, 107399. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Bircher, A.; Kamel, M.; Alexis, K.; Burri, M.; Oettershagen, P.; Omari, S.; Mantel, T.; Siegwart, R. Three-dimensional coverage path planning via viewpoint resampling and tour optimization for aerial robots. Auton. Robot. 2016, 40, 1059–1078. [Google Scholar] [CrossRef]
- Loree, N.; Aros-Vera, F. Points of distribution location and inventory management model for Post-Disaster Humanitarian Logistics. Transp. Res. Part E Logist. Transp. Rev. 2018, 116, 1–24. [Google Scholar] [CrossRef]
- Choi, H.; Ha, H. The Priority of Supply Chain Designs for Humanitarian Relief with AHP (Analytic Hierarchy Process). Korean J. Logist. 2013, 21, 121–134. [Google Scholar] [CrossRef]
- Hu, C.; Liu, X.; Hua, Y. A bi-objective robust model for emergency resource allocation under uncertainty. Int. J. Prod. Res. 2016, 54, 7421–7438. [Google Scholar] [CrossRef]
- Mohammadi, M.; Mirzazadeh, A. MCLP and SQM models for the emergency vehicle districting and location problem. Decis. Sci. Lett. 2014, 3, 479–490. [Google Scholar] [CrossRef]
- Alem, D.; Bonilla-Londono, H.F.; Barbosa-Povoa, A.P.; Relvas, S.; Ferreira, D.; Moreno, A. Building disaster preparedness and response capacity in humanitarian supply chains using the Social Vulnerability Index. Eur. J. Oper. Res. 2021, 292, 250–275. [Google Scholar] [CrossRef]
- Liu, K.; Liu, C.; Xiang, X.; Tian, Z. Testing facility location and dynamic capacity planning for pandemics with demand uncertainty. Eur. J. Oper. Res. 2023, 304, 150–168. [Google Scholar] [CrossRef]
- Sapankevych, N.I.; Sankar, R. Time series prediction using support vector machines: A survey. IEEE Comput. Intell. Mag. 2009, 4, 24–38. [Google Scholar] [CrossRef]
- Li, O.; Liu, H.; Chen, C.; Rudin, C. Deep learning for case-based reasoning through prototypes: A neural network that explains its predictions. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. [Google Scholar]
- Sun, J.; Cao, H.; Geng, B.; Tang, Z.; Li, X. Demand prediction of railway emergency resources based on case-based reasoning. J. Adv. Transp. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- Jin, R.; Xia, T.; Liu, X.; Murata, T.; Kim, K.S. Predicting emergency medical service demand with bipartite graph convolutional networks. IEEE Access 2021, 9, 9903–9915. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, G.; Sun, B. A comprehensive literature review of the demand forecasting methods of emergency resources from the perspective of artificial intelligence. Nat. Hazards 2019, 97, 65–82. [Google Scholar] [CrossRef]
- Wagner, M.R.; Radovilsky, Z. Optimizing boat resources at the US Coast Guard: Deterministic and stochastic models. Oper. Res. 2012, 60, 1035–1049. [Google Scholar] [CrossRef]
- Razi, N.; Karatas, M. A multi-objective model for locating search and rescue boats. Eur. J. Oper. Res. 2016, 254, 279–293. [Google Scholar] [CrossRef]
- Akbari, A.; Pelot, R.; Eiselt, H.A. A modular capacitated multi-objective model for locating maritime search and rescue vessels. Ann. Oper. Res. 2018, 267, 3–28. [Google Scholar] [CrossRef]
- Akbari, A.; Eiselt, H.A.; Pelot, R. A maritime search and rescue location analysis considering multiple criteria, with simulated demand. INFOR Inf. Syst. Oper. Res. 2018, 56, 92–114. [Google Scholar] [CrossRef]
- Ma, Q.; Zhang, D.; Wan, C.; Zhang, J.; Lyu, N. Multi-objective emergency resources allocation optimization for maritime search and rescue considering accident black-spots. Ocean Eng. 2022, 261, 112178. [Google Scholar] [CrossRef]
- Nelson, C.; Boros, E.; Roberts, F.; Rubio-Herrero, J.; Kantor, P.; McGinity, C.; Nakamura, B.; Ricks, B.; Ball, P.; Conrad, C.; et al. ACCAM global optimization model for the USCG aviation air stations. In Proceedings of the IIE Annual Conference. Proceedings. Institute of Industrial and Systems Engineers (IISE), Montreal, QC, Canada, 31 May–3 June 2014; p. 2761. [Google Scholar]
- Karatas, M.; Razi, N.; Gunal, M.M. An ILP and simulation model to optimize search and rescue helicopter operations. J. Oper. Res. Soc. 2017, 68, 1335–1351. [Google Scholar] [CrossRef]
- Ferrari, J.F.; Chen, M. A mathematical model for tactical aerial search and rescue fleet and operation planning. Int. J. Disaster Risk Reduct. 2020, 50, 101680. [Google Scholar] [CrossRef]
- Guo, Y.; Ye, Y.; Yang, Q.; Yang, K. A multi-objective INLP model of sustainable resource allocation for long-range maritime search and rescue. Sustainability 2019, 11, 929. [Google Scholar] [CrossRef]
- Sun, Y.; Ling, J.; Chen, X.; Kong, F.; Hu, Q.; Biancardo, S.A. Exploring maritime search and rescue resource allocation via an enhanced particle swarm optimization method. J. Mar. Sci. Eng. 2022, 10, 906. [Google Scholar] [CrossRef]
- Zhou, X. A comprehensive framework for assessing navigation risk and deploying maritime emergency resources in the South China Sea. Ocean Eng. 2022, 248, 110797. [Google Scholar] [CrossRef]
- Roondiwala, M.; Patel, H.; Varma, S. Predicting stock prices using LSTM. Int. J. Sci. Res. (IJSR) 2017, 6, 1754–1756. [Google Scholar]
- Chen, K.; Zhou, Y.; Dai, F. A LSTM-based method for stock returns prediction: A case study of China stock market. In Proceedings of the 2015 IEEE International Conference on Big Data (Big Data), Santa Clara, CA, USA, 29 October–1 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2823–2824. [Google Scholar]
- Shah, S.; Singh, M. Comparison of a time efficient modified K-mean algorithm with K-mean and K-medoid algorithm. In Proceedings of the 2012 International Conference on Communication Systems and Network Technologies, Rajkot, India, 11–13 May 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 435–437. [Google Scholar]
- Elvik, R. State-of-the-Art Approaches to Road Accident Black Spot Management and Safety Analysis of Road Networks; Transportøkonomisk Institutt: Oslo, Norway, 2007. [Google Scholar]
- Zhang, J.; Wan, C.; He, A.; Zhang, D.; Soares, C.G. A two-stage black-spot identification model for inland waterway transportation. Reliab. Eng. Syst. Saf. 2021, 213, 107677. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Muiltiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Liu, D.; Yan, P.; Pu, Z.; Wang, Y.; Kaisar, E.I. Hybrid artificial immune algorithm for optimizing a Van-Robot E-grocery delivery system. Transp. Res. Part E Logist. Transp. Rev. 2021, 154, 102466. [Google Scholar] [CrossRef]
- Babalik, A.; Cinar, A.C.; Kiran, M.S. A modification of tree-seed algorithm using Deb’s rules for constrained optimization. Appl. Soft Comput. 2018, 63, 289–305. [Google Scholar] [CrossRef]
- Xiaolin, Z.; Changding, C. Multi-objective optimization of marine emergency resource dispatching. Navig. China 2019, 42, 56–62. [Google Scholar]
- Duan, Y.; Ren, H.; Xu, F.; Yang, X.; Meng, Y. Bi-Objective Integrated Scheduling of Quay Cranes and Automated Guided Vehicles. J. Mar. Sci. Eng. 2023, 11, 1492. [Google Scholar] [CrossRef]
- Rezaei, M.; Afsahi, M.; Shafiee, M.; Patriksson, M. A bi-objective optimization framework for designing an efficient fuel supply chain network in post-earthquakes. Comput. Ind. Eng. 2020, 147, 106654. [Google Scholar] [CrossRef]
- Rashidnejad, M.; Ebrahimnejad, S.; Safari, J. A bi-objective model of preventive maintenance planning in distributed systems considering vehicle routing problem. Comput. Ind. Eng. 2018, 120, 360–381. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Main Objectives | Problem Description | Model Features | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Time | Cost | Others | SAR Ships | SAR Aircraft | Emergency Resources | Rescue Bases | Black Spots | Solution Method | Multi-Obj. Approach | |
| [23] | ✓ | ✓ | M | M | EXC | FLP | ||||
| [24] | ✓ | ✓ | ✓ | M | M | M | EXC | EC | ||
| [25] | ✓ | ✓ | M | M | M | EXC | WS | |||
| [26] | ✓ | M | M | M | EXC | WS | ||||
| [27] | ✓ | ✓ | M | M | M | M | GA | WS | ||
| [28] | ✓ | M | M | M | EXC | |||||
| [29] | ✓ | M | M | M | RB | EC | ||||
| [30] | ✓ | ✓ | ✓ | M | M | S | B-OA | WS | ||
| [31] | ✓ | M | M | M | S | NSGA-II | PS | |||
| [32] | ✓ | M | M | M | M | PSO | ||||
| [33] | ✓ | M | M | M | AHP+GT | |||||
| This paper | ✓ | ✓ | M | M | M | M | M | NSGA-II | PS+TOPSIS | |
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Learning rate | 0.01 | 0.02 | 0.03 | 0.04 | 0.05 | 0.06 | 0.07 | 0.08 | 0.09 | 0.1 |
| MAPE | 8.4167 | 5.4440 | 3.5315 | 2.6721 | 1.5839 | 4.1607 | 7.2514 | 5.3333 | 8.5214 | 9.75 |
| RMSE | 9.0784 | 6.0553 | 4.4064 | 3.2404 | 1.9758 | 4.6904 | 8.0881 | 6.0415 | 9.2195 | 10.5633 |
| Black Spot | Number of Predicted Accidents | |||||||
|---|---|---|---|---|---|---|---|---|
| 6 | 1 | 4 | 1 | 1 | 2 | 0 | 0 | |
| 11 | 1 | 2 | 1 | 2 | 1 | 0 | 1 | |
| 9 | 7 | 8 | 1 | 7 | 4 | 2 | 3 | |
| 7 | 2 | 5 | 1 | 12 | 2 | 1 | 1 | |
| 6 | 5 | 9 | 1 | 13 | 2 | 2 | 3 | |
| 8 | 7 | 4 | 1 | 7 | 2 | 1 | 3 | |
| 7 | 6 | 6 | 1 | 8 | 1 | 1 | 2 | |
| 9 | 1 | 2 | 1 | 1 | 1 | 1 | 0 | |
| Rescue Base | Lon. (E) | Lat. (N) | Black Spot | Lon. (E) | Lat. (N) |
|---|---|---|---|---|---|
| Shantou () | 116.45 | 23.18 | 117.41 | 22.57 | |
| Shenzhen () | 113.52 | 22.31 | 115.54 | 22.33 | |
| Guangzhou () | 113.33 | 22.52 | 115.01 | 21.11 | |
| Yangjiang () | 112.00 | 21.52 | 113.18 | 21.08 | |
| Zhanjiang () | 110.24 | 21.15 | 111.18 | 20.24 | |
| Haikou () | 110.16 | 20.01 | 108.49 | 20.43 | |
| Beihai () | 109.04 | 21.28 | 108.38 | 17.55 | |
| Sanya () | 109.3 | 18.13 | 111.34 | 17.01 |
| No. | MSAR Equipment | Quantity | Speed (km/h) | Transportation Cost (EUR/h) |
|---|---|---|---|---|
| 1 | Marine professional rescue ship () | 10 | 34.26 | 500 |
| 2 | Medium endurance multitasked ship () | 4 | 51.39 | 1000 |
| 3 | MSAR lifeboat () | 19 | 59.62 | 1000 |
| 4 | EC225 helicopter () | 2 | 275 | 1800 |
| 5 | S-76C helicopter () | 3 | 287 | 1600 |
| 125 | 120 | 135 | 119 | 85 | 76 | 124 | 180 | |
| 178 | 154 | 216 | 221 | 168 | 154 | 263 | 336 | |
| 127 | 164 | 186 | 81 | 157 | 120 | 330 | 312 | |
| 108 | 90 | 49 | 80 | 54 | 46 | 111 | 154 | |
| 0.8 | 0.9 | 0.85 | 0.95 | 1.1 | 1.25 | 1.15 | 1.2 | |
| 7890 | 4740 | 5749 | 4700 | 7800 | 9890 | 6785 | 8452 |
| Accident Type | Emergency Resources | MSAR Equipment | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 2 | 5 | 1 | 4 | 1 | 0 | 0 | 0 | 0 | |
| 4 | 6 | 15 | 3 | 0 | 1 | 0 | 0 | 1 | |
| 4 | 10 | 10 | 2 | 0 | 0 | 1 | 0 | 0 | |
| 10 | 16 | 2 | 1 | 0 | 0 | 1 | 0 | 0 | |
| 2 | 4 | 5 | 2 | 0 | 1 | 0 | 0 | 1 | |
| 2 | 10 | 10 | 2 | 0 | 0 | 0 | 1 | 0 | |
| 10 | 10 | 12 | 1 | 0 | 0 | 1 | 0 | 0 | |
| 6 | 10 | 15 | 3 | 0 | 0 | 1 | 0 | 0 | |
| Maintenance cost | (EUR/unit) | (EUR/year) | |||||||
| 60 | 60 | 5 | 20 | 2000 | 2000 | 1200 | 1500 | 1800 | |
| No. | DNSGA-II | PSO | NSGA-II | EPSO | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| QM | CPU(s) | QM | CPU(s) | QM | CPU(s) | QM | CPU(s) | |||||||||
| 1 | 742.31 | 22.58 | 37 | 384.32 | 698.23 | 27.54 | 28 | 313.5 | 716.24 | 24.83 | 28 | 346.60 | 725.64 | 23.67 | 31 | 326.41 |
| 2 | 743.45 | 23.21 | 36 | 384.94 | 697.54 | 26.78 | 27 | 312.93 | 718.43 | 25.21 | 29 | 344.02 | 715.8 | 23.58 | 28 | 324.57 |
| 3 | 738.42 | 23.67 | 33 | 372.23 | 697.54 | 27.41 | 27 | 312.93 | 717.92 | 24.92 | 29 | 348.02 | 716.58 | 22.57 | 31 | 326.86 |
| 4 | 745.32 | 22.53 | 42 | 383.02 | 695.32 | 25.81 | 27 | 312.34 | 721.23 | 24.31 | 28 | 342.93 | 718.26 | 24.57 | 34 | 326.58 |
| 5 | 743.28 | 23.51 | 40 | 394.28 | 694.83 | 28.13 | 24 | 314.63 | 715.92 | 25.63 | 25 | 346.11 | 725.14 | 23.54 | 32 | 332.15 |
| 6 | 747.26 | 24.24 | 41 | 396.92 | 695.83 | 27.62 | 23 | 314.02 | 718.72 | 24.92 | 27 | 345.23 | 719.68 | 23.54 | 32 | 325.24 |
| 7 | 753.45 | 24.65 | 36 | 384.49 | 697.38 | 27.71 | 23 | 313.52 | 715.32 | 23.51 | 28 | 345.42 | 721.24 | 24.15 | 34 | 329.45 |
| 8 | 745.54 | 23.16 | 37 | 384.76 | 696.45 | 27.65 | 26 | 313.65 | 717.10 | 24.89 | 28 | 346.26 | 724.64 | 24.61 | 29 | 330.15 |
| 9 | 752.62 | 23.49 | 35 | 382.65 | 697.29 | 27.16 | 29 | 314.31 | 715.92 | 24.71 | 30 | 348.35 | 721.54 | 22.44 | 31 | 326.54 |
| 10 | 734.92 | 21.53 | 39 | 386.56 | 695.24 | 28.52 | 27 | 312.89 | 719.23 | 23.96 | 25 | 347.32 | 715.64 | 23.61 | 29 | 324.59 |
| Avg | 744.66 | 23.26 | 37.67 | 388.42 | 695.17 | 27.43 | 26.33 | 313.45 | 717.60 | 24.69 | 27.78 | 346.16 | 720.42 | 23.63 | 31.1 | 327.25 |
| 98 | 173 | 125 | 79 | 1 | 0 | 1 | 0 | 1 | |
| 82 | 152 | 133 | 89 | 0 | 1 | 2 | 1 | 3 | |
| 96 | 143 | 129 | 45 | 0 | 0 | 1 | 1 | 2 | |
| 101 | 181 | 69 | 79 | 0 | 1 | 2 | 0 | 2 | |
| 85 | 152 | 145 | 52 | 0 | 0 | 1 | 0 | 0 | |
| 62 | 148 | 137 | 36 | 0 | 0 | 1 | 0 | 1 | |
| 116 | 236 | 248 | 87 | 1 | 0 | 1 | 0 | 1 | |
| 167 | 302 | 306 | 135 | 0 | 1 | 1 | 1 | 3 |
| 118 | 163 | 125 | 99 | 1 | 0 | 2 | 1 | 3 | |
| 102 | 142 | 163 | 89 | 0 | 0 | 0 | 1 | 0 | |
| 125 | 200 | 179 | 47 | 0 | 1 | 3 | 1 | 3 | |
| 115 | 221 | 80 | 75 | 0 | 1 | 2 | 0 | 2 | |
| 80 | 145 | 155 | 55 | 0 | 0 | 1 | 0 | 1 | |
| 70 | 152 | 117 | 36 | 0 | 0 | 2 | 0 | 1 | |
| 115 | 259 | 302 | 91 | 1 | 0 | 2 | 0 | 3 | |
| 180 | 312 | 308 | 141 | 0 | 1 | 1 | 1 | 3 |
| Before Optimization | After Optimization | Difference Percentage | |
|---|---|---|---|
| Response time | 22.52 | 19.97 | −11.32% |
| Allocation cost | −6.15% | ||
| Number of MSAR ships | 33 | 26 | −21.21% |
| Number of MSAR aircraft | 5 | 5 | 0 |
| Number of | 905 | 807 | −10.82% |
| Number of | 1594 | 1487 | −6.71% |
| Number of | 1429 | 1292 | −10.6% |
| Number of | 633 | 602 | −4.90% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Ren, H.; Zhu, Y.; Tao, R.; Duan, Y.; Shao, N. A Multi-Objective Optimization Method for Maritime Search and Rescue Resource Allocation: An Application to the South China Sea. J. Mar. Sci. Eng. 2024, 12, 184. https://doi.org/10.3390/jmse12010184
Dong Y, Ren H, Zhu Y, Tao R, Duan Y, Shao N. A Multi-Objective Optimization Method for Maritime Search and Rescue Resource Allocation: An Application to the South China Sea. Journal of Marine Science and Engineering. 2024; 12(1):184. https://doi.org/10.3390/jmse12010184
Chicago/Turabian StyleDong, Yaxin, Hongxiang Ren, Yuzhu Zhu, Rui Tao, Yating Duan, and Nianjun Shao. 2024. "A Multi-Objective Optimization Method for Maritime Search and Rescue Resource Allocation: An Application to the South China Sea" Journal of Marine Science and Engineering 12, no. 1: 184. https://doi.org/10.3390/jmse12010184