
Fast Reconstruction Model of the Ship Hull NURBS Surface with Uniform Continuity for Calculating the Hydrostatic Elements
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mathematical Background
2.1. NURBS Curves
2.2. NURBS Surfaces
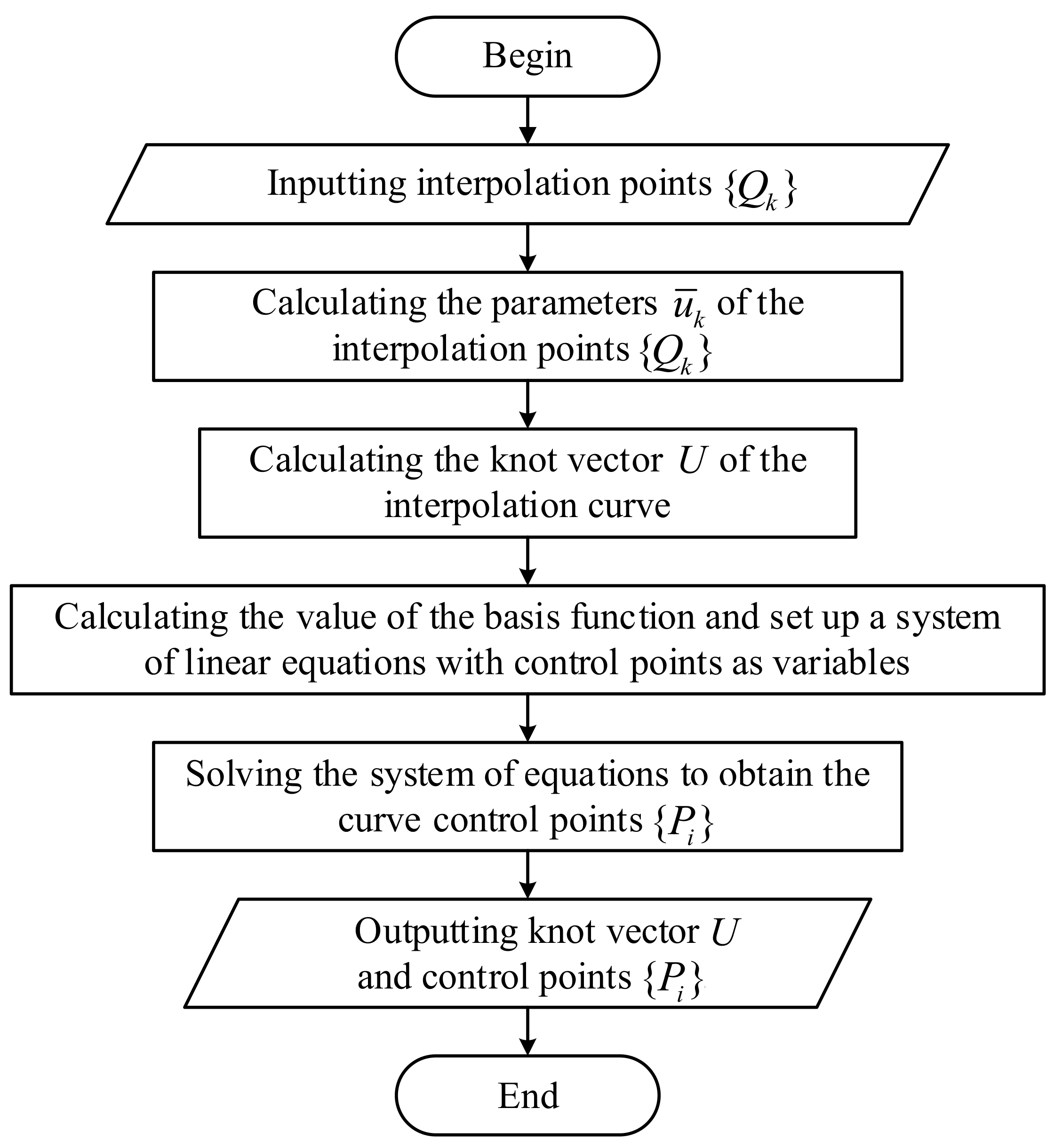
2.3. Interpolation of NURBS Curves
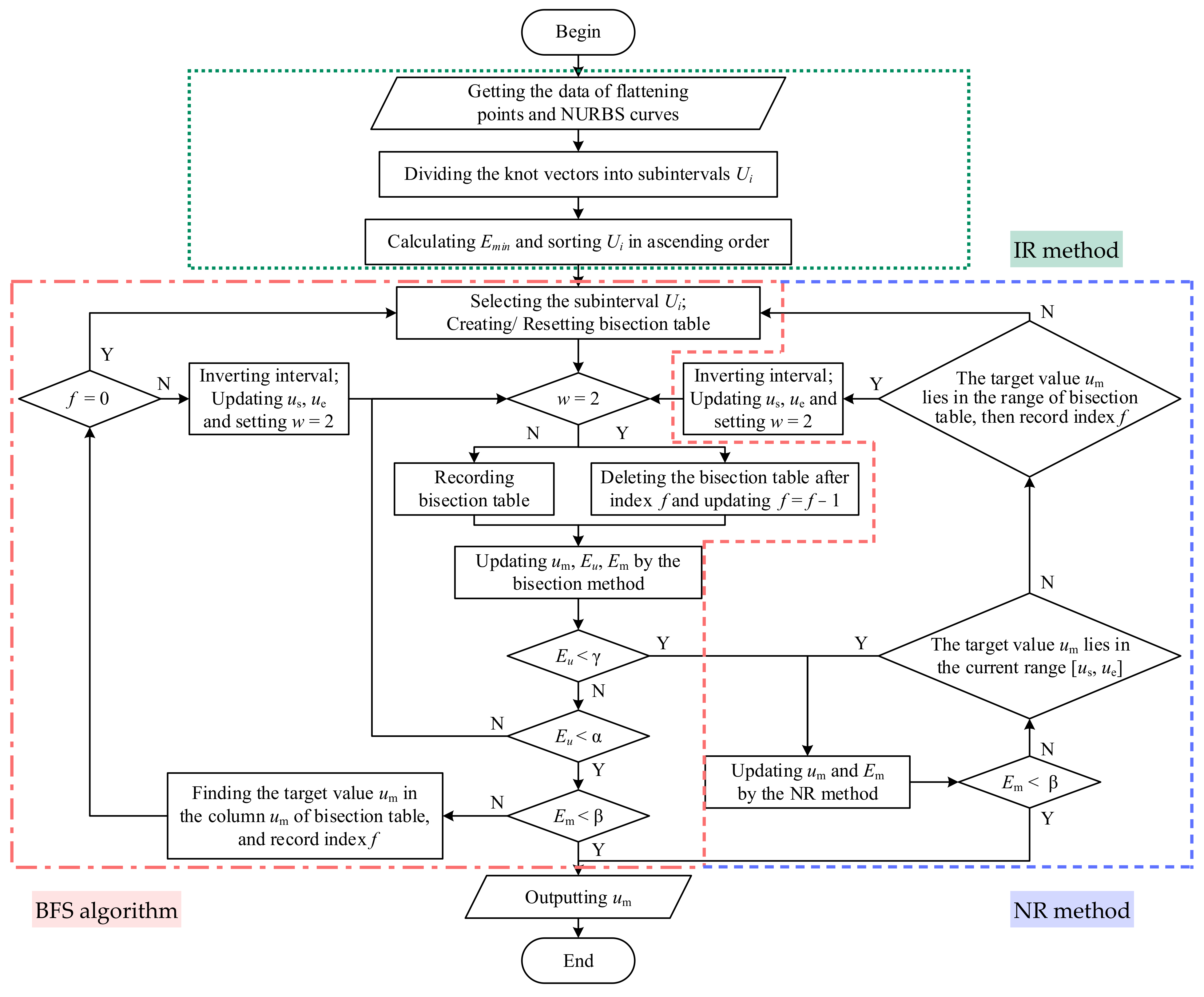
2.4. Inversion Algorithm of the NURBS Curves
3. Framework of the Proposed Methodology
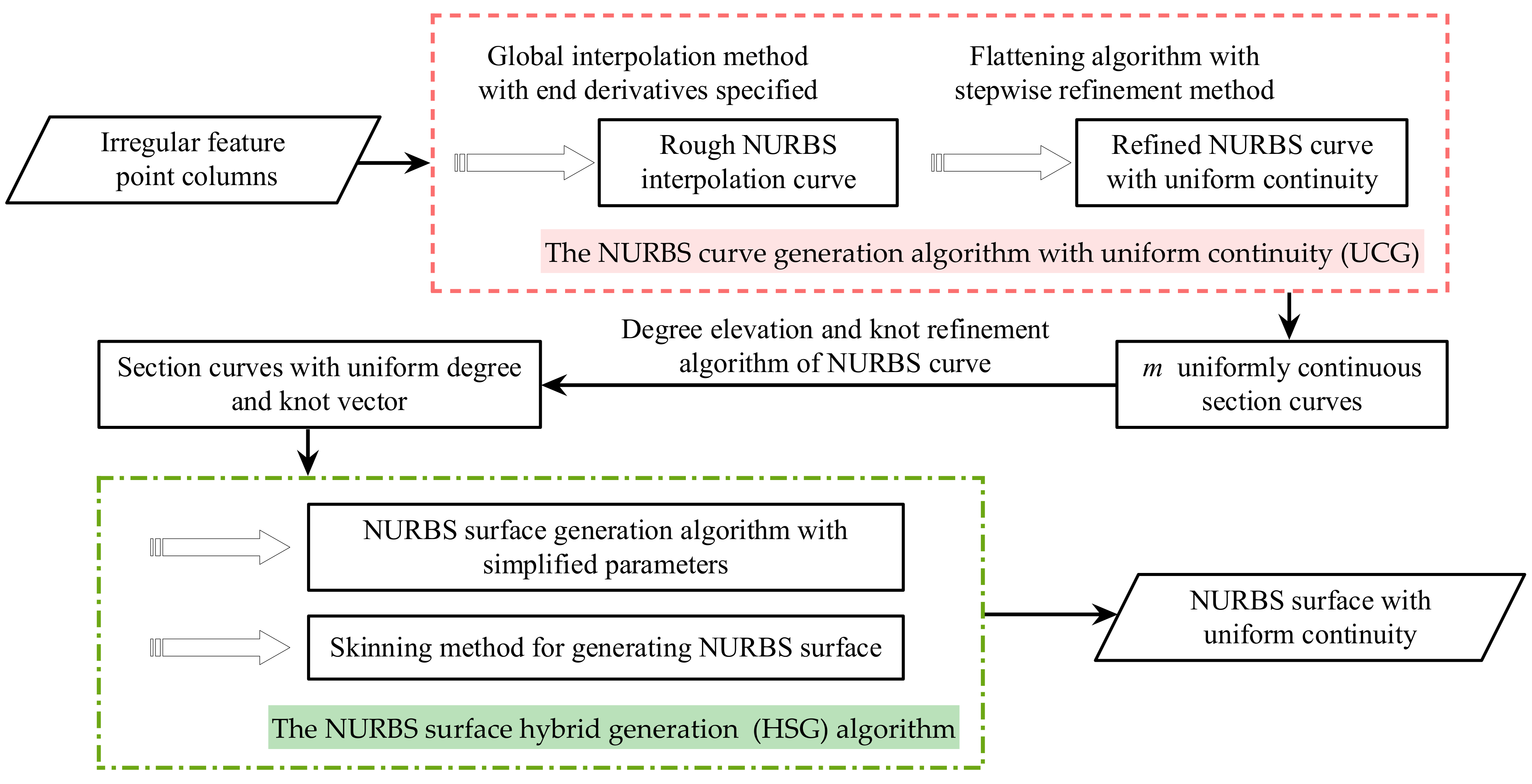
3.1. Fast Reconstruction Model with Uniform Continuity
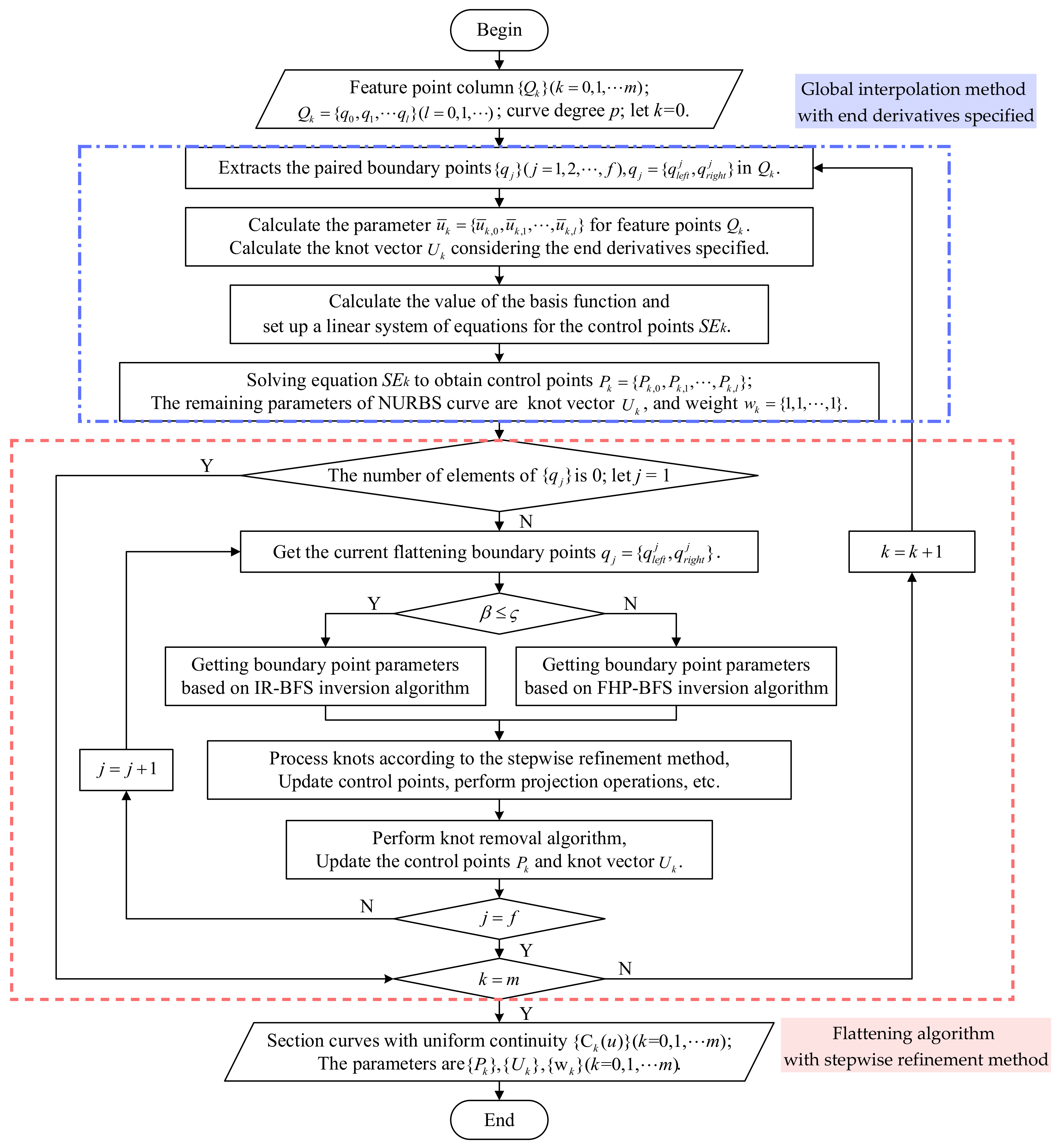
3.2. NURBS Curve Generation Algorithm with Uniform Continuity
3.2.1. Framework of the UCG Algorithm
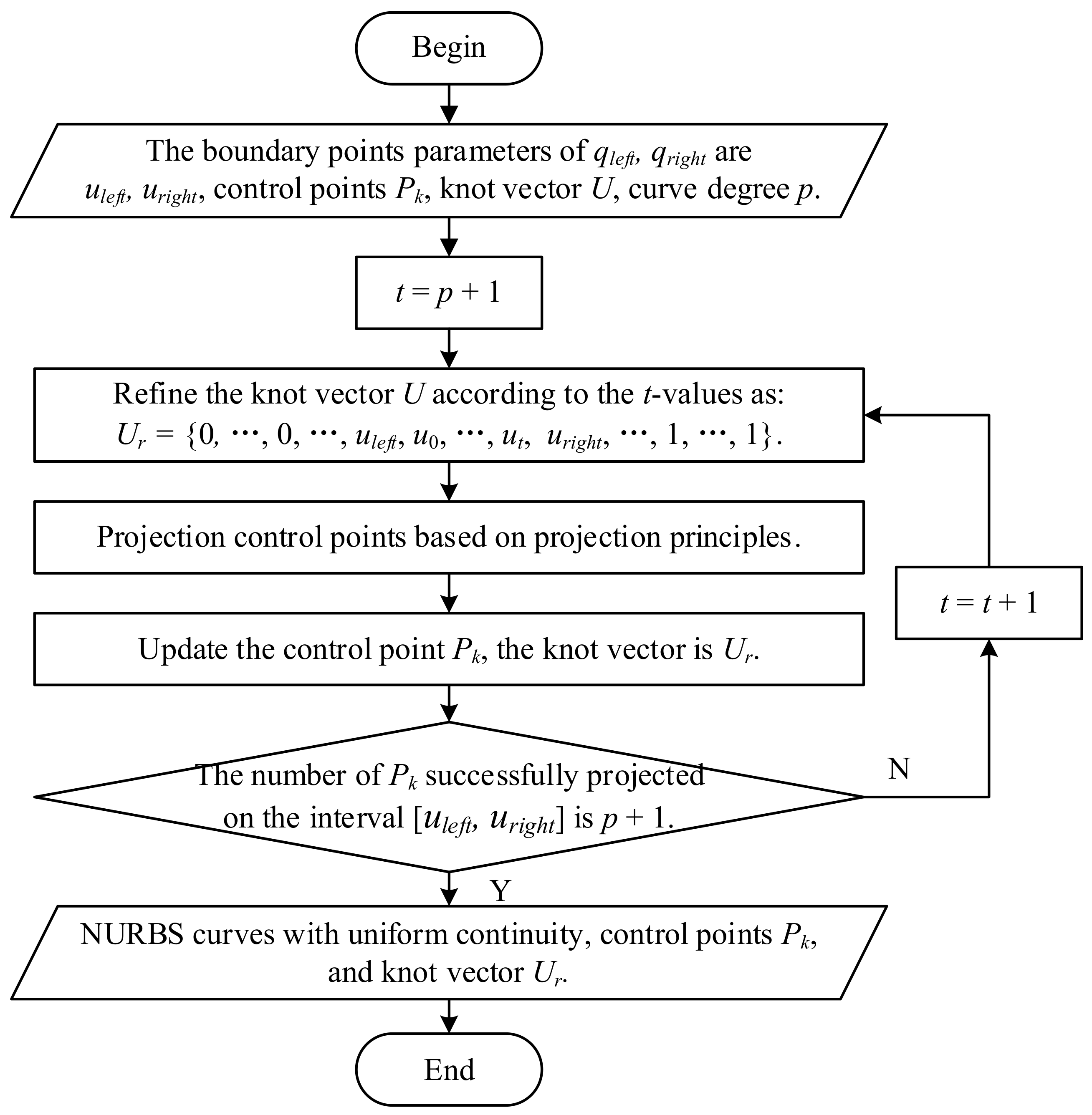
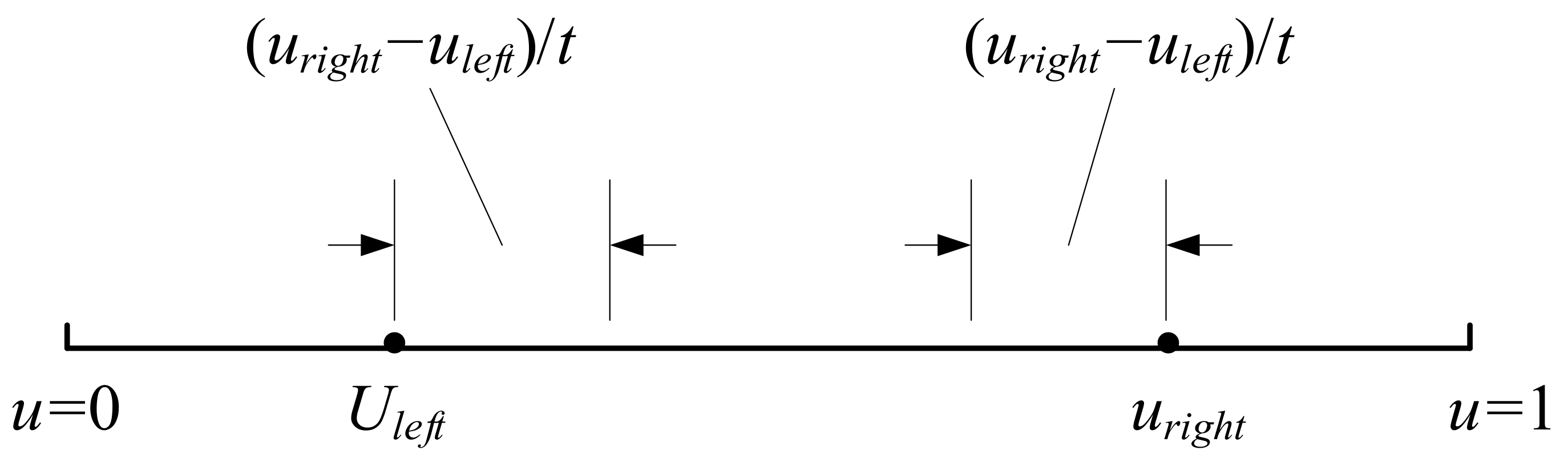
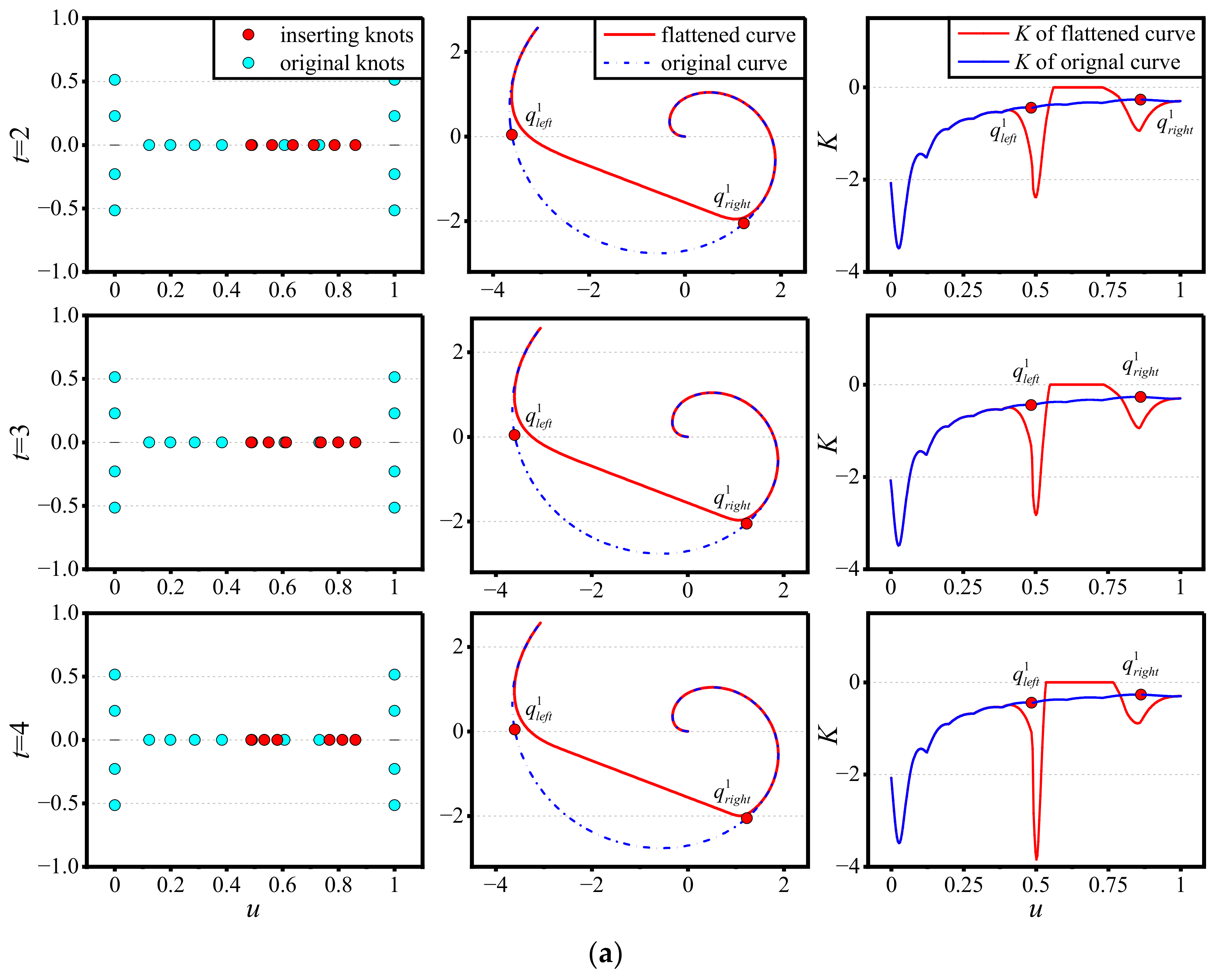
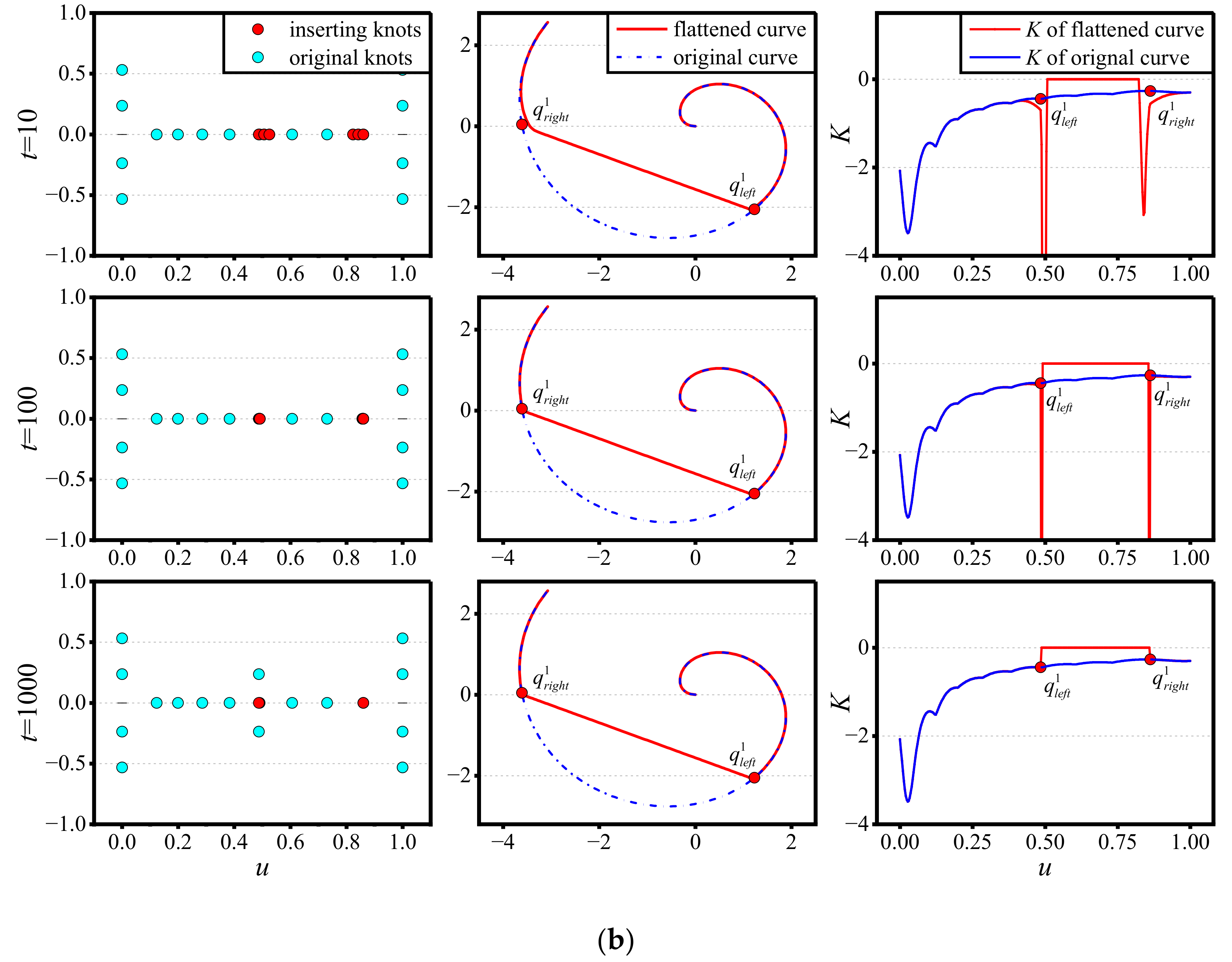
3.2.2. Parameter Setting of the Stepwise Refinement Method
- (i)
- The inserting knots gradually approach the values of the knot parameters of flattening points;
- (ii)
- The smoothness of the curve near the flattening points gradually becomes less obvious;
- (iii)
- The curvature change speed of the flattened curves near the flattening points gradually increases.
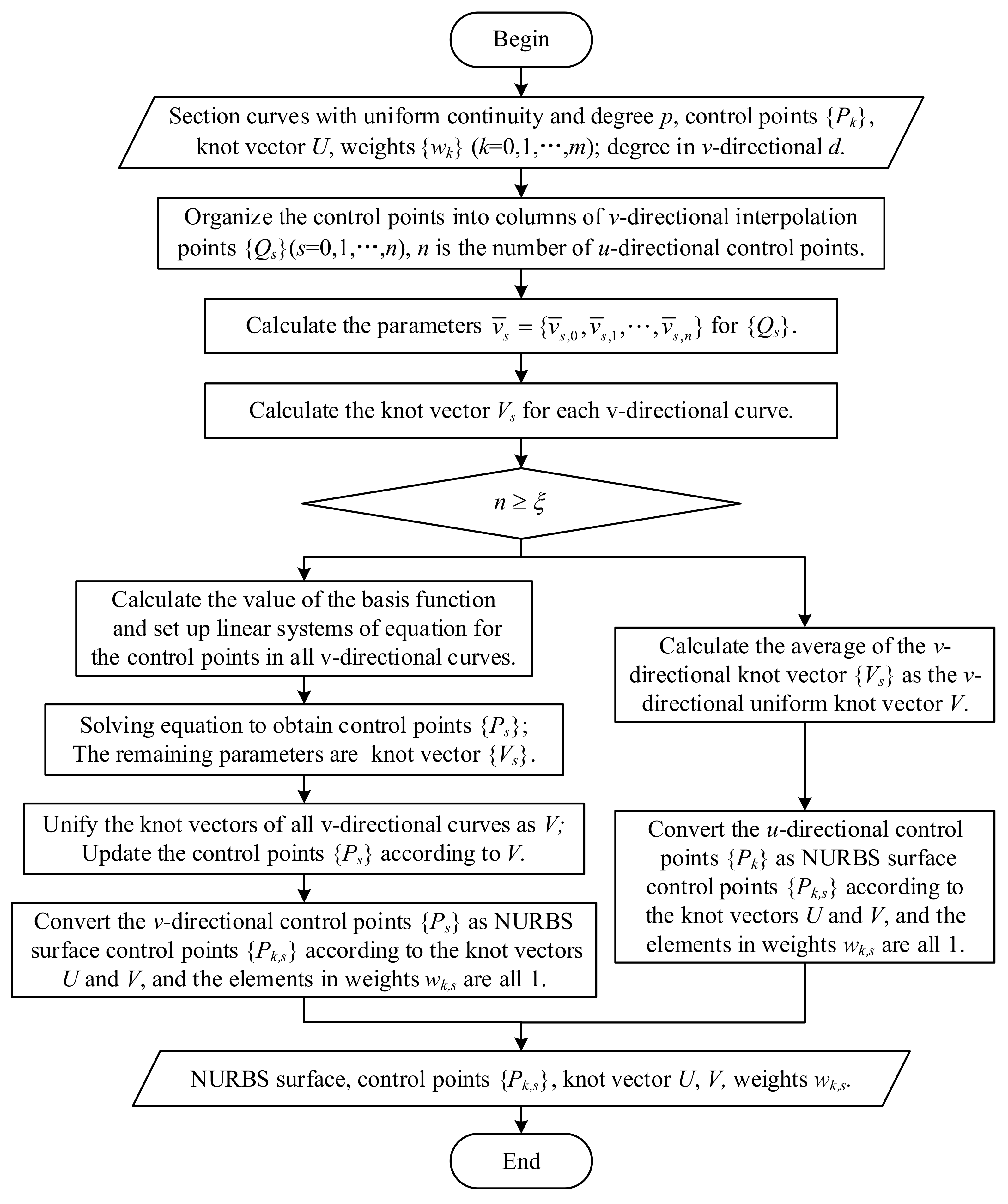
3.3. Hybrid NURBS Surface Generation Algorithm
4. Results and Discussion
4.1. Effectiveness Analysis of the UCG Algorithm
4.2. Effectiveness Analysis of the HSG Algorithm
4.3. Comparison of Algorithms for Generating Ship Hull Surfaces
5. Conclusions
- (i)
- A UCG algorithm was proposed for the fast generation of NURBS curves with uniform continuity that can accurately express hull bending and planar details. The proposed algorithm generates accurate hull NURBS curves from the table of offsets or waterline data by considering the feature distribution of a hull profile.
- (ii)
- An HSG algorithm adapted to the UCG algorithm was proposed to improve the calculation speed while guaranteeing the accuracy of the ship hull NURBS surface.
- (iii)
- The combination of the UCG and HSG algorithms can construct a fast-generation algorithm for hull NURBS surfaces with uniform continuity. The optimal selection range of relevant parameters of the UCG algorithm was determined with comparison experiments, facilitating its application to engineering and other similar studies.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Japan Transport Safety Board (JTSB). Statistics of Marine Accidents and Incidents. Available online: https://www.mlit.go.jp/jtsb/statistics_mar.html (accessed on 13 September 2023).
- European Maritime Safety Agency (EMSA). EMSA Facts and Figures 2022; European Maritime Safety Agency: Lisbon, Portugal, 2023; Available online: http://www.emsa.europa.eu/ (accessed on 19 May 2023).
- Sun, X.; Ni, Y.; Liu, C.; Wang, Z.; Yin, Y. A practical method for stability assessment of a damaged ship. Ocean Eng. 2021, 222, 108594. [Google Scholar] [CrossRef]
- Asadi, P.; Alimohammadi, S.; Kohantorabi, O. Effects of material type, preheating and weld pass number on residual stress of welded steel pipes by multi-pass TIG welding. Therm. Sci. Eng. Progress 2020, 16, 100462. [Google Scholar] [CrossRef]
- Akbari, M.; Asadi, P. Dissimilar friction stir lap welding of aluminum to brass: Modeling of material mixing using coupled Eulerian–Lagrangian method with experimental verifications. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2020, 234, 1117–1128. [Google Scholar] [CrossRef]
- Jung, H.B.K.; Kim, K. A new parameterisation method for NURBS surface interpolation. Int. J. Adv. Manuf. Technol. 2000, 16, 784–790. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Kulczycka, M.A.; Nachman, L.J. Qualitative and quantitative comparisons of B-spline offset surface approximation methods. Comput.-Aided Des. 2002, 34, 19–26. [Google Scholar] [CrossRef]
- Park, H.; Kim, K.; Lee, S.C. A method for approximate NURBS curve compatibility based on multiple curve refitting. Comput.-Aided Des. 2000, 32, 237–252. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. Algorithm for approximate NURBS skinning. Comput.-Aided Des. 1996, 28, 699–706. [Google Scholar] [CrossRef]
- Andradas, C.; Recio, T.; Sendra, J.R.; Tabera, L.F.; Villarino, C. Reparametrizing swung surfaces over the reals. Appl. Algebra Eng. Commun. Comput. 2014, 25, 39–65. [Google Scholar] [CrossRef]
- Farouki, R.T.; Nittler, K.M. Rational swept surface constructions based on differential and integral sweep curve properties. Comput. Aided Geom. Des. 2015, 33, 1–16. [Google Scholar] [CrossRef]
- Boden, H.U.; Chrisman, M.; Karimi, H. The Gordon-Litherland pairing for links in thickened surfaces. Int. J. Math. 2022, 33, 2250078. [Google Scholar] [CrossRef]
- Randrianarivony, M. On global continuity of Coons mappings in patching CAD surfaces. Comput.-Aided Des. 2009, 41, 782–791. [Google Scholar] [CrossRef]
- He, S.; Xuan, J.; Du, W.; Xia, Q.; Xiong, S.; Zhang, L.; Wang, Y.; Wu, J.; Tao, H.; Shi, T. Spiral tool path generation method in a NURBS parameter space for the ultra-precision diamond turning of freeform surfaces. J. Manuf. Process. 2020, 60, 340–355. [Google Scholar] [CrossRef]
- Bhattarai, S.; Dahal, K.; Vichare, P.; Chen, W. Adapted Delaunay triangulation method for free-form surface generation from random point clouds for stochastic optimization applications. Struct. Multidiscip. Optim. 2020, 61, 649–660. [Google Scholar] [CrossRef]
- Park, H.; Kim, K. Smooth surface approximation to serial cross-sections. Comput.-Aided Des. 1996, 28, 995–1005. [Google Scholar] [CrossRef]
- Park, H. An approximate lofting approach for B-spline surface fitting to functional surfaces. Int. J. Adv. Manuf. Technol. 2001, 18, 474–482. [Google Scholar] [CrossRef]
- Piegl, L.A.; Tiller, W. Surface skinning revisited. Vis. Comput. 2002, 18, 273–283. [Google Scholar] [CrossRef]
- Piegl, L.A.; Tiller, W. Biarc approximation of NURBS curves. Comput.-Aided Des. 2002, 34, 807–814. [Google Scholar] [CrossRef]
- Park, H. Lofted B-spline surface interpolation by linearly constrained energy minimization. Comput.-Aided Des. 2003, 35, 1261–1268. [Google Scholar] [CrossRef]
- Shamsuddin, S.M.; Ahmed, M.A.; Smian, Y. NURBS skinning surface for ship hull design based on new parameterization method. Int. J. Adv. Manuf. Technol. 2006, 28, 936–941. [Google Scholar] [CrossRef]
- Shamsuddin, S.M.H.; Ahmed, M.A. A hybrid parameterization method for NURBS. In Proceedings of the International Conference on Computer Graphics, Imaging and Visualization 2004, Penang, Malaysia, 2 July 2004; pp. 15–20. [Google Scholar]
- Wu, H. An adaptive character skinning algorithm based on the property of real skin. Comput. Anim. Virtual Worlds 2019, 30, e1868. [Google Scholar] [CrossRef]
- Bang, S.; Lee, S.H. Spline interface for intuitive skinning weight editing. ACM Trans. Graph. 2018, 37, 1–14. [Google Scholar] [CrossRef]
- Yin, H.; Mukundan, R. Improved vertex skinning algorithm based on dual quaternions. In Proceedings of the 2019 IEEE 21st International Workshop on Multimedia Signal Processing (MMSP), Kuala Lumpur, Malaysia, 27–29 September 2019; pp. 1–6. [Google Scholar]
- Liu, S.L.; Liu, Y.; Dong, L.F.; Tong, X. RAS: A data-driven rigidity-aware skinning model for 3D facial animation. Comput. Graph. Forum 2020, 39, 581–594. [Google Scholar] [CrossRef]
- Moutafidou, A.; Toulatzis, V.; Fudos, I. Temporal parameter-free deep skinning of animated meshes. In Advances in Computer Graphics; Springer: Cham, Switzerland, 2021; pp. 3–24. [Google Scholar]
- Kruppa, K.; Kunkli, R.; Hoffmann, M. A skinning technique for modeling artistic disk B-spline shapes. Comput. Graph. 2023, 115, 96–106. [Google Scholar] [CrossRef]
- Wei, J.; Sun, C.; Zhang, X.J.; Wang, E.J.; Law, D. An efficient and accurate interpolation method for parametric curve machining. Sci. Rep. 2022, 12, 16000. [Google Scholar] [CrossRef] [PubMed]
- Ma, W.; Kruth, J.P. Parametrization of randomly measured points for least- squares fitting of B-spline curves and surfaces. Comput.-Aided Des. 1995, 27, 663–675. [Google Scholar] [CrossRef]
- Xiao, Y.J.; Li, Y.F. Optimized stereo reconstruction of free-form space curves based on a non-uniform rational B-spline model. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2005, 22, 1746–1762. [Google Scholar] [CrossRef] [PubMed]
- Saini, D.; Kumar, S.; Gulati, T.R. NURBS-based geometric inverse reconstruction of free-form shaped objects. JKSU-Comput. Inf. Sci. 2017, 29, 116–133. [Google Scholar]
- Vahdani, R.; Saraee, S.M.; Mohtashami, V. Parallel body-shaping of electrically large objects described by NURBS surfaces. Int. J. RF Microw. Comput. Aid Eng. 2022, 32, e23543. [Google Scholar] [CrossRef]
- Voisin, S.; Abidi, M.A.; Foufou, S.; Truchetet, F. Genetic algorithms for 3D reconstruction with supershapes. In Proceedings of the 2009 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–10 November 2009; pp. 529–532. [Google Scholar]
- Cai, Y.; Su, Z.; Li, Z.; Sun, R.; Liu, X.; Zhao, Y. Two-view curve reconstruction based on the snake model. J. Comput. Appl. Math. 2011, 236, 631–639. [Google Scholar] [CrossRef]
- Saini, D.; Kumar, S.; Gulati, T.R. Reconstruction of free-form space curves using NURBS-snakes and a quadratic programming approach. Comput. Aided Geom. Des. 2015, 33, 30–45. [Google Scholar] [CrossRef]
- Lu, Y.; Yong, J.H.; Shi, K.L.; Song, H.C.; Ye, T.Y. 3D B-spline curve construction from orthogonal views with self-overlapping projection segments. Comput. Graph. 2016, 54, 18–27. [Google Scholar] [CrossRef]
- Alazzam, A.; Alomar, B. Using average uniform algorithm to model educational data. In Proceedings of the 2017 Fourth HCT Information Technology Trends (ITT), Al Ain, United Arab Emirates, 25–26 October 2017; IEEE: New York, NY, USA, 2017; pp. 30–34. [Google Scholar]
- Singh, A.; Deep, K. Reconstruction of 3D curves and surfaces using new variants of gravitational search algorithm. J. Inf. Optim. Sci. 2018, 39, 1199–1221. [Google Scholar] [CrossRef]
- Saini, D.; Kumar, S.; Singh, M.K.; Ali, M. Two view NURBS reconstruction based on GACO model. Complex. Intell. Syst. 2021, 7, 2329–2346. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, Z.; Fan, F.; Sun, Y. Shape optimization of free-form grid structures based on the sensitivity hybrid multi-objective evolutionary algorithm. J. Build. Eng. 2021, 44, 102538. [Google Scholar] [CrossRef]
- Zhu, K.; Shi, G.; Liu, J.; Shi, J. Fast high-precision bisection feedback search algorithm and its application in flattening the NURBS curve. J. Mar. Sci. Eng. 2022, 10, 1851. [Google Scholar] [CrossRef]
- Zhu, K.G.; Shi, G.Y.; Liu, J. Improved flattening algorithm for NURBS curve based on bisection feedback search algorithm and interval reformation method. Ocean Eng. 2022, 247, 110635. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Cottrell, J.A.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- Arapakopoulos, A.; Polichshuk, R.; Segizbayev, Z.; Ospanov, S.; Ginnis, A.I.; Kostas, K.V. Parametric models for marine propellers. Ocean Eng. 2019, 192, 106595. [Google Scholar] [CrossRef]
- Ji, S.; Lei, L.; Zhao, J.; Lu, X.; Gao, H. An adaptive real-time NURBS curve interpolation for 4-axis polishing machine tool. Robot. Comput.-Integr. Manuf. 2021, 67, 102025. [Google Scholar] [CrossRef]
- Zhu, K.; Shi, G.; Liu, J. Fast NURBS Skinning Algorithm and Ship Hull Section Refinement Model. In Proceedings of the 2023 7th International Conference on Machine Learning and Soft Computing (ICMLSC’23), Chongqing, China, 5–7 January 2023; Association for Computing Machinery: New York, NY, USA, 2023; pp. 26–33. [Google Scholar]
- Callens, S.J.P.; Uyttendaele, R.J.C.; Fratila-Apachitei, L.E. Substrate curvature as a cue to guide spatiotemporal cell and tissue organization. Biomaterials 2019, 232, 119739. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Shi, W.; Karimirad, M. Second-order hydrodynamic effects on the response of three semisubmersible floating offshore wind turbines. Ocean Eng. 2020, 207, 107371. [Google Scholar] [CrossRef]























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, K.; Shi, G.; Liu, J.; Shi, J. Fast Reconstruction Model of the Ship Hull NURBS Surface with Uniform Continuity for Calculating the Hydrostatic Elements. J. Mar. Sci. Eng. 2023, 11, 1816. https://doi.org/10.3390/jmse11091816
Zhu K, Shi G, Liu J, Shi J. Fast Reconstruction Model of the Ship Hull NURBS Surface with Uniform Continuity for Calculating the Hydrostatic Elements. Journal of Marine Science and Engineering. 2023; 11(9):1816. https://doi.org/10.3390/jmse11091816
Chicago/Turabian StyleZhu, Kaige, Guoyou Shi, Jiao Liu, and Jiahui Shi. 2023. "Fast Reconstruction Model of the Ship Hull NURBS Surface with Uniform Continuity for Calculating the Hydrostatic Elements" Journal of Marine Science and Engineering 11, no. 9: 1816. https://doi.org/10.3390/jmse11091816