
Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins

Abstract
:1. Introduction
2. Rigid–Flexible Robot Model
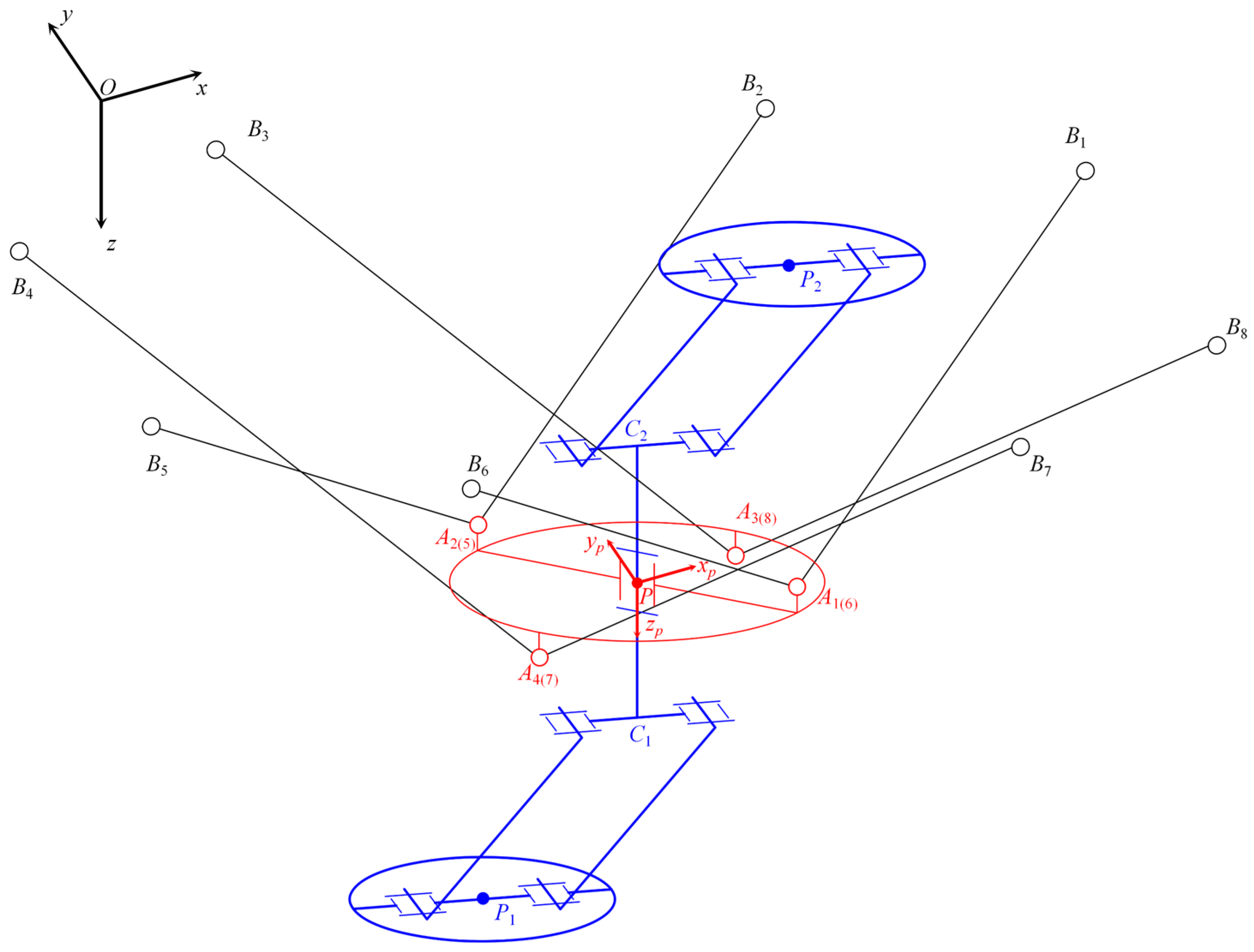
2.1. Rigid–Flexible Robot Geometric Model
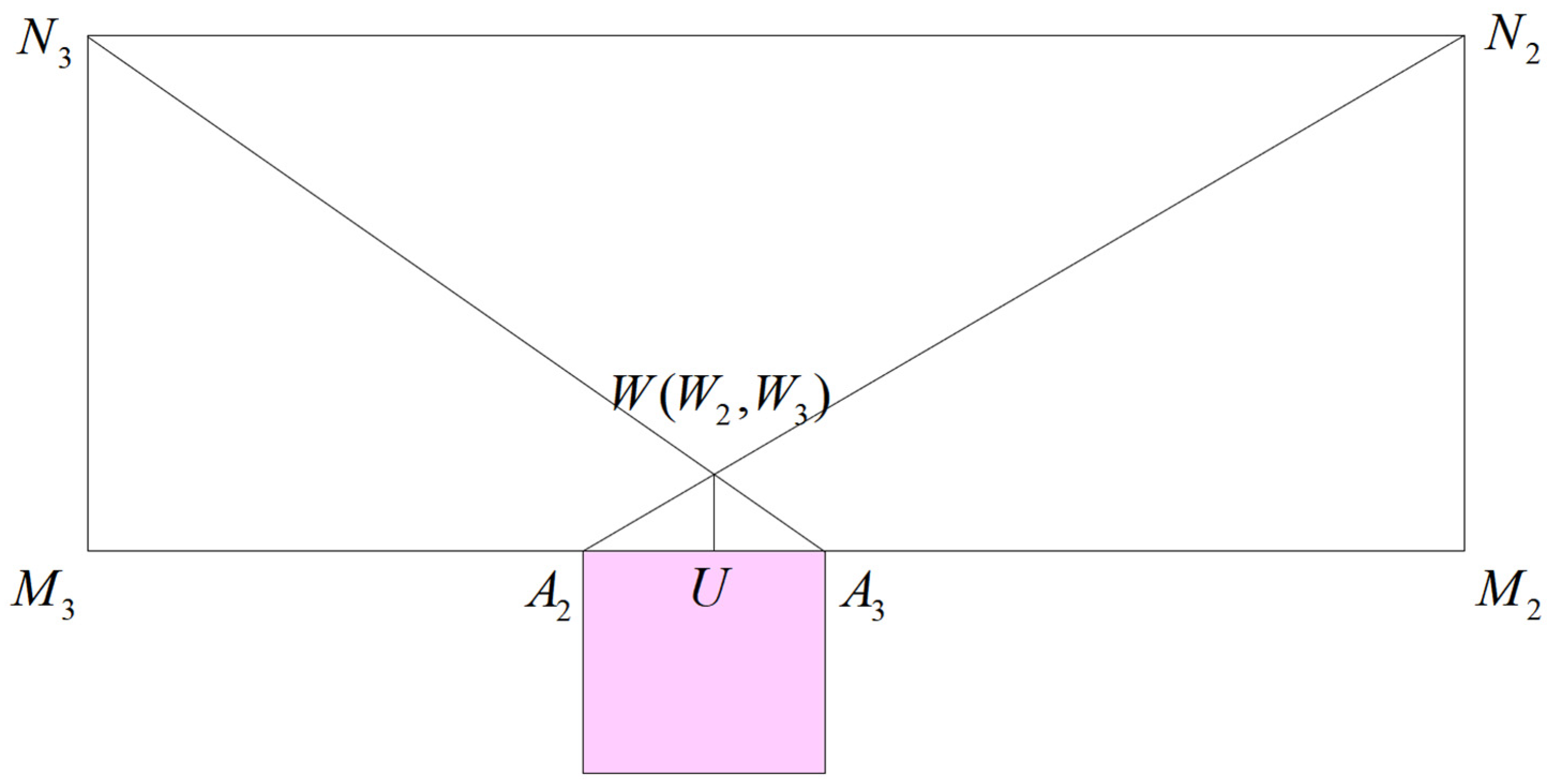
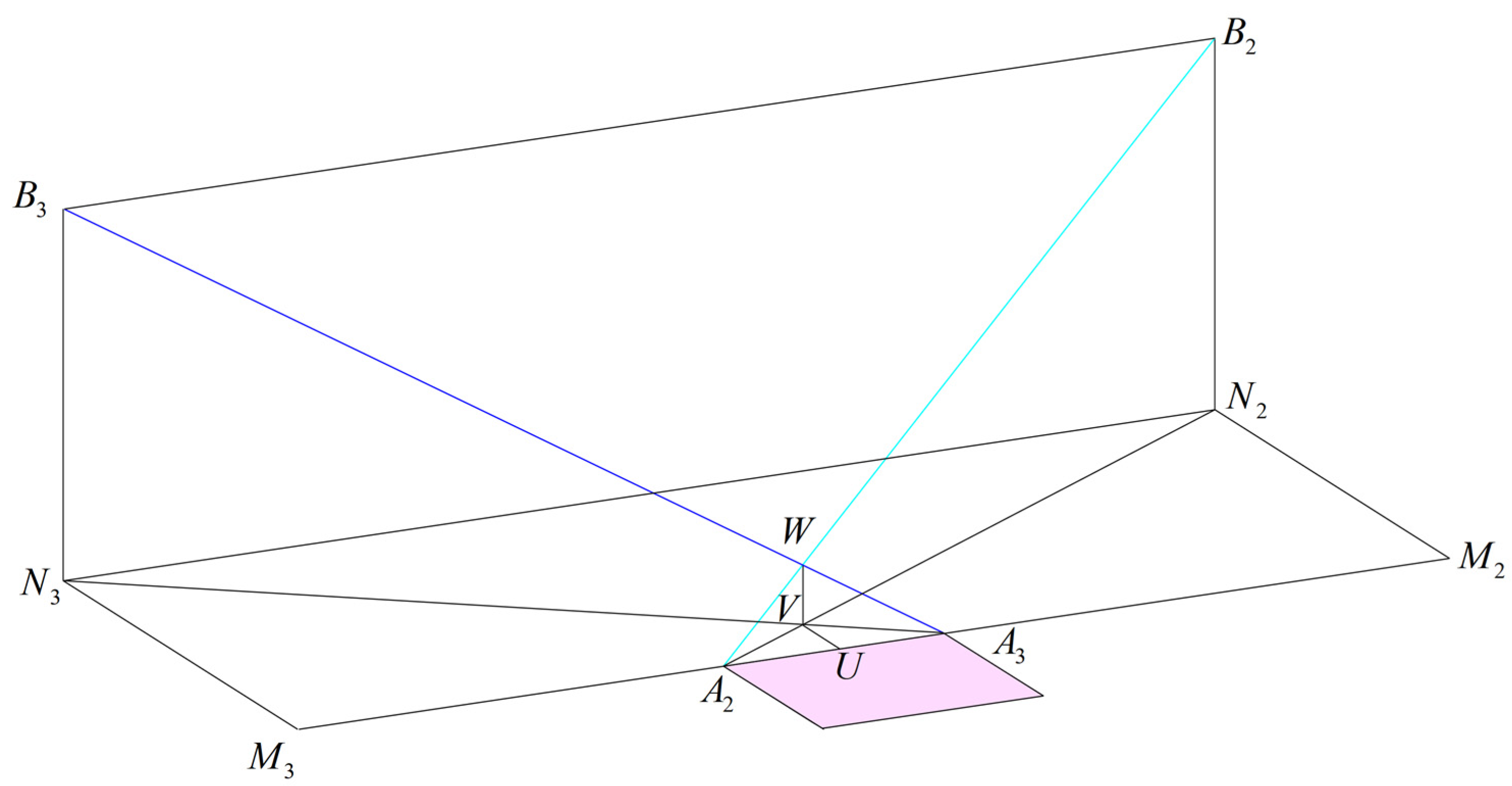
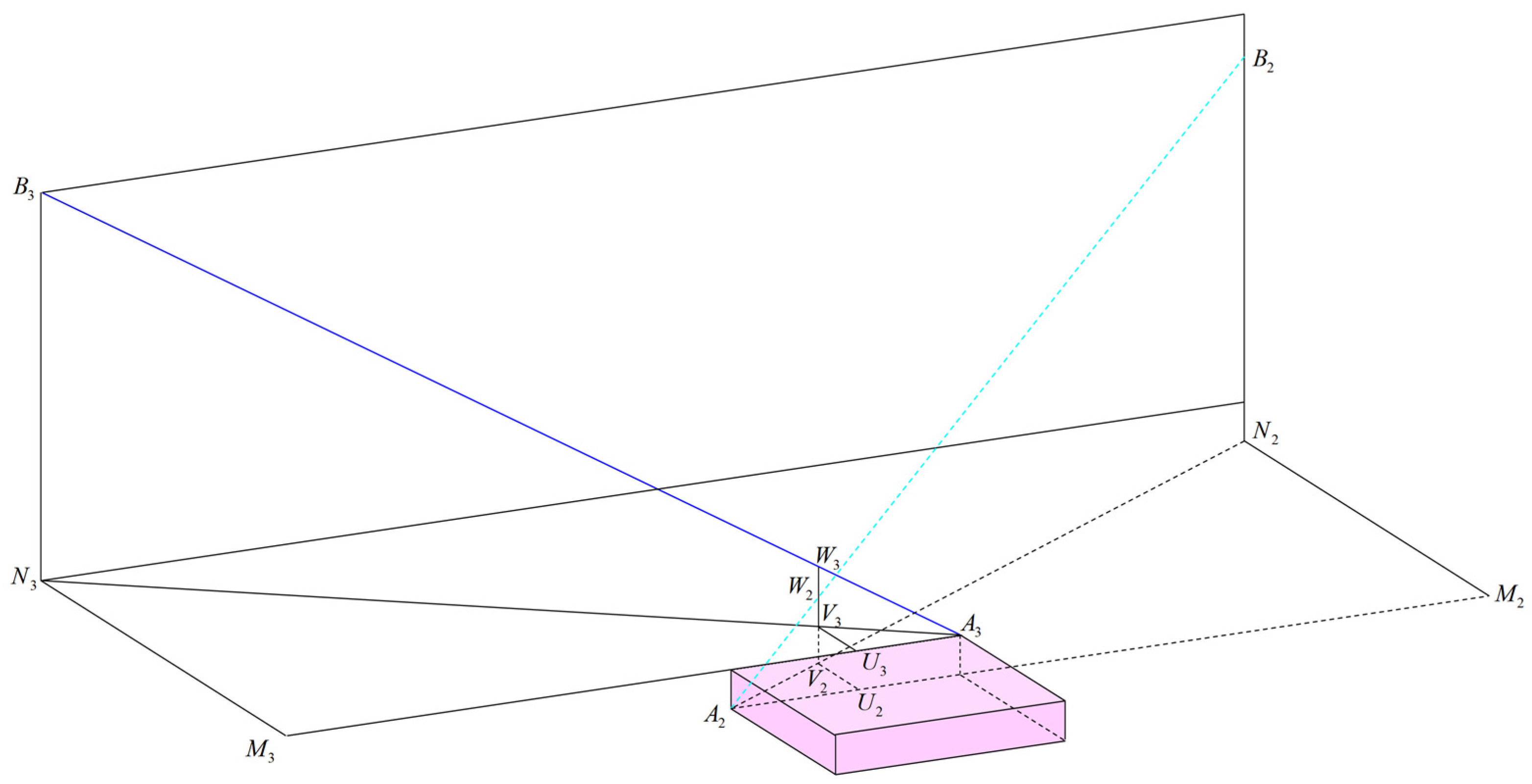
2.2. Cable Interference Analysis
3. Motion and Force Analysis of the Cable-Parallel Robot
3.1. Motion Analysis
3.2. Static Force Analysis
4. Workspace Analysis of the Cable-Parallel Robot
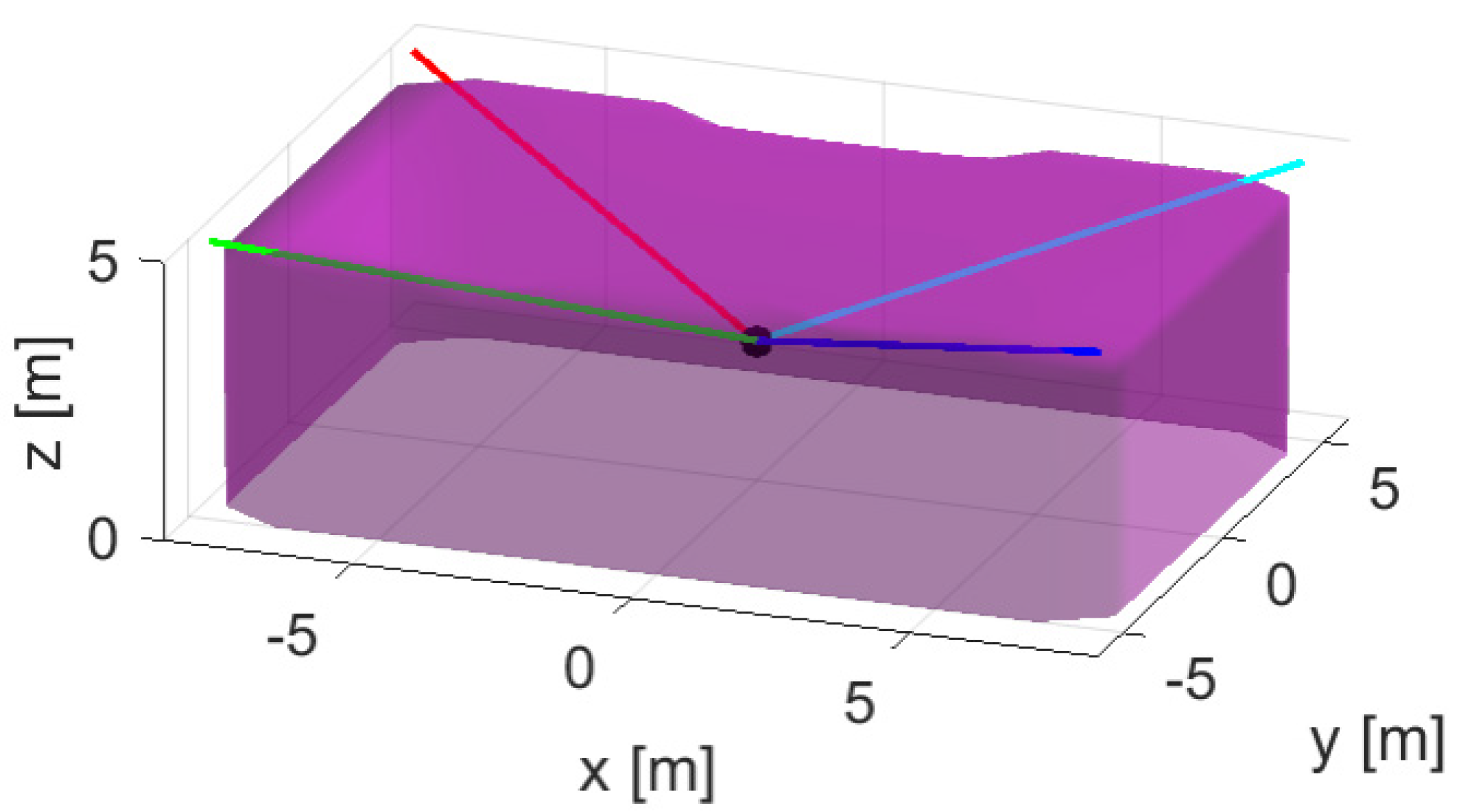
4.1. Reachable Workspace Analysis
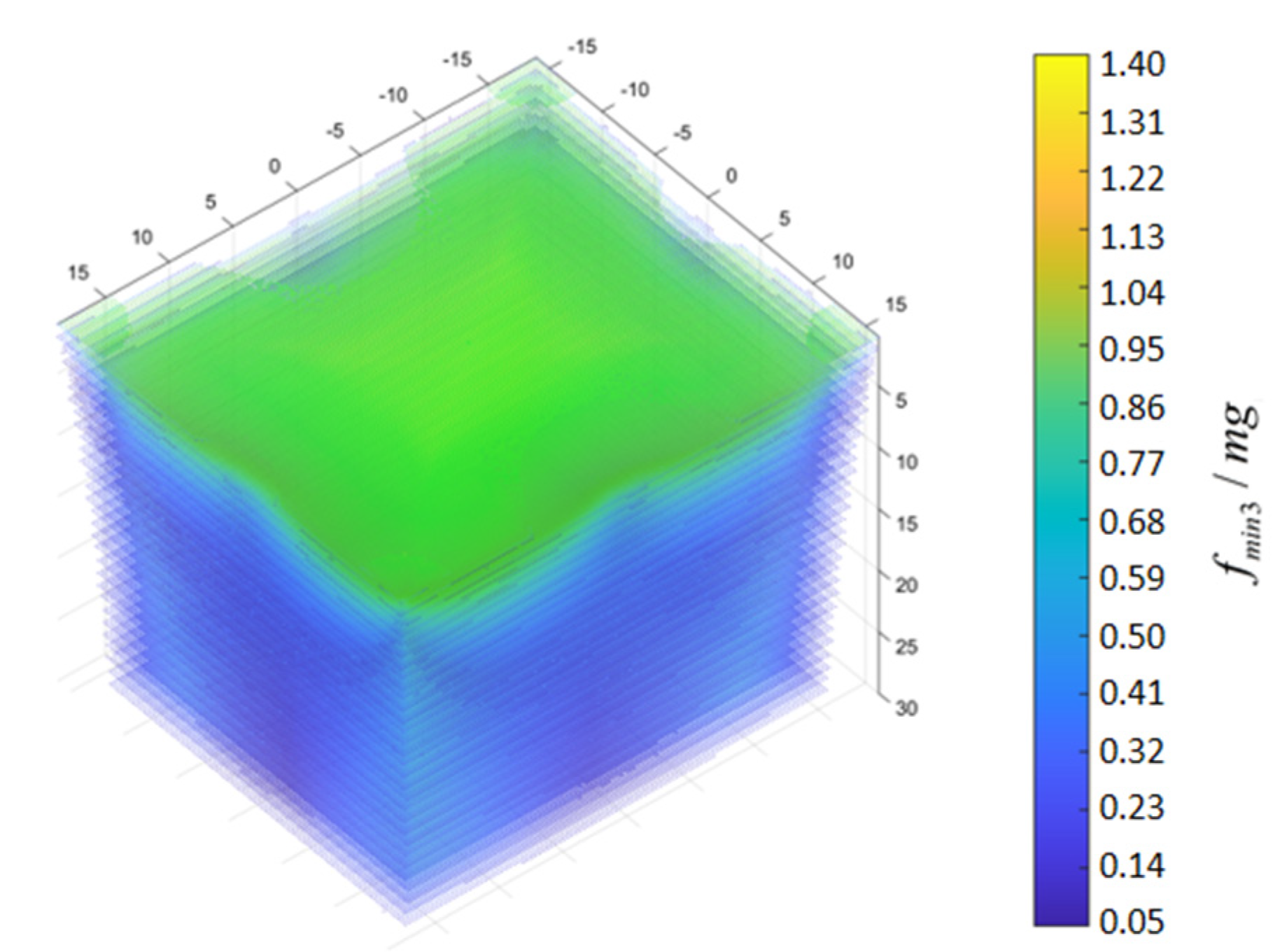
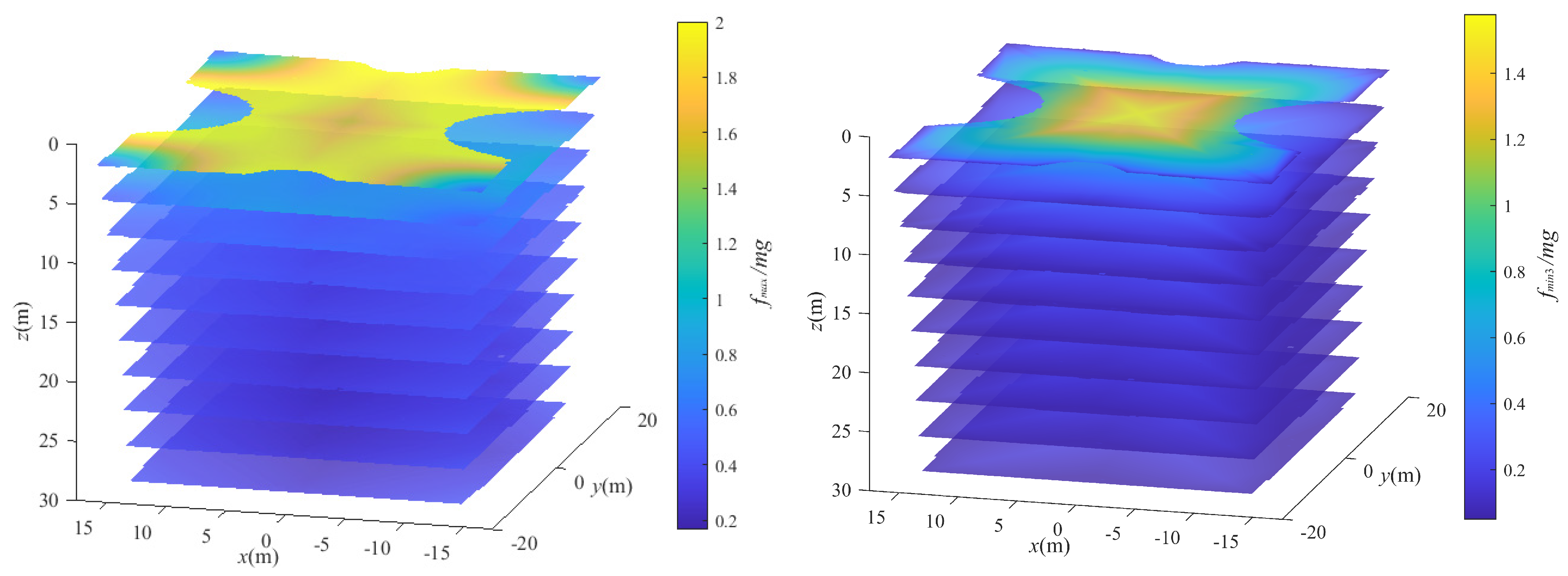
4.2. Cable Force Analysis
5. Dimensional Analysis of the Frame-Type Manipulator
5.1. Rapid Search Method for Feasible Posture and End-Effector-Reachable Workspace of Rigid–Flexible Robotic System
5.2. End-Effector-Reachable Workspace Analysis of the Rigid–Flexible Robotic System
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- An, H.G. Research on the Tank Coating Techniques Optimization for the Product Oil Tanker. Master’s Thesis, Dalian University of Technology, Dalian, China, 2019. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Wang, L. Optimization and implementation of a high-speed 3-DOFs translational cable-driven parallel robot. Mech. Mach. Theory 2020, 145, 103693. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Wang, L.; Shih, A.J. Optimal Design of a High-Speed Pick-and-Place Cable-Driven Parallel Robot. In Cable-Driven Parallel Robots; Gosselin, C., Cardou, P., Bruckmann, T., Pott, A., Eds.; Mechanisms and Machine Science; Springer: Cham, Switzerland, 2018; Volume 53. [Google Scholar] [CrossRef]
- Shao, Z.F.; Tang, X.Q.; Chen, X.; Wang, L.-P. Driving force analysis for the secondary adjustable system in FAST. Robotica 2011, 29, 903–915. [Google Scholar] [CrossRef]
- Gosselin, C. Cable-driven parallel mechanisms: State of the art and perspectives. Mech. Eng. Rev. 2014, 1, DSM0004. [Google Scholar] [CrossRef]
- Tang, X. An overview of the development for cable-driven parallel manipulator. Adv. Mech. Eng. 2014, 6, 823028. [Google Scholar] [CrossRef]
- Zi, B.; Duan, B.Y.; Du, J.L.; Bao, H. Dynamic modeling and active control of a cable-suspended parallel robot. Mechatronics 2008, 18, 1–12. [Google Scholar] [CrossRef]
- Ming, A. Study on multiple degree-of-freedom positioning mechanism using wires (part 1). Int. J. Jpn. Soc. Precis. Eng. 1994, 28, 131–138. [Google Scholar]
- Bostelman, R.; Albus, J.; Dagalakis, N.; Jacoff, A.; Gross, J. Applications of the NIST RoboCrane. In Proceedings of the 5th International Symposium on Robotics and Manufacturing, Maui, HI, USA, 14–18 August 1994; Volume 5, p. 1. [Google Scholar]
- Lamaury, J.; Gouttefarde, M. Control of a large redundantly actuated cable-suspended parallel robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4659–4664. [Google Scholar] [CrossRef]
- Caro, S.; Merlet, J.P. Failure analysis of a collaborative 4-1 cable-driven parallel robot. In New Trends in Mechanism and Machine Science; EuCoMeS 8; Springer International Publishing: Cham, Switzerland, 2020; pp. 440–447. [Google Scholar] [CrossRef]
- Alp, A.B.; Agrawal, S.K. Cable suspended robots: Design, planning and control. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 4, pp. 4275–4280. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Merlet, J.P.; Daney, D. Determination of the wrench-closure workspace of 6-DOF parallel cable-driven mechanisms. In Advances in Robot Kinematics: Mechanisms and Motion; Springer: Dordrecht, The Netherlands, 2006; pp. 315–322. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Gosselin, C.M. Analysis of the wrench-closure workspace of planar parallel cable-driven mechanisms. IEEE Trans. Robot. 2006, 22, 434–445. [Google Scholar] [CrossRef]
- Bosscher, P.; Riechel, A.T.; Ebert-Uphoff, I. Wrench-feasible workspace generation for cable-driven robots. IEEE Trans. Robot. 2006, 22, 890–902. [Google Scholar] [CrossRef]
- Pusey, J.; Fattah, A.; Agrawal, S.; Messina, E. Design and workspace analysis of a 6–6 cable-suspended parallel robot. Mech. Mach. Theory 2004, 39, 761–778. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Merlet, J.P.; Daney, D. Wrench-feasible workspace of parallel cable-driven mechanisms. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1492–1497. [Google Scholar] [CrossRef]
- Nurahmi, L.; Pramujati, B.; Caro, S.; Jeffrey. Dimension synthesis of suspended eight cables-driven parallel robot for search-and-rescue operation. In Proceedings of the 2017 International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation (ICAMIMIA), Surabaya, Indonesia, 12–14 October 2017; pp. 237–241. [Google Scholar] [CrossRef]
- Handojo, V.A.; Syamlan, A.T.; Nurahmi, L.; Pramujati, B.; Tamara, M.N.; Wasiwitono, U. Cable driven parallel robot with big interference-free workspace. In Mechanism and Machine Science: Select Proceedings of Asian MMS 2018; Springer: Singapore, 2020; pp. 43–56. [Google Scholar] [CrossRef]
- Castelli, G.; Ottaviano, E.; González, A. Analysis and simulation of a new Cartesian cable-suspended robot. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2010, 224, 1717–1726. [Google Scholar] [CrossRef]
- Barrette, G.; Gosselin, C.M. Determination of the dynamic workspace of cable-driven planar parallel mechanisms. J. Mech. Des. 2005, 127, 242–248. [Google Scholar] [CrossRef]
- Gosselin, C.; Ren, P.; Foucault, S. Dynamic trajectory planning of a two-DOF cable-suspended parallel robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1476–1481. [Google Scholar] [CrossRef]
- Longval, J.M.; Gosselin, C. Dynamic trajectory planning and geometric design of a two-DOF translational cable-suspended planar parallel robot using a parallelogram cable loop. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 51814, p. V05BT07A030. [Google Scholar] [CrossRef]
- Gosselin, C. Global planning of dynamically feasible trajectories for three-DOF spatial cable-suspended parallel robots. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2013; pp. 3–22. [Google Scholar] [CrossRef]
- Jiang, X.; Gosselin, C. Dynamically feasible trajectories for three-dof planar cable-suspended parallel robots. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 46360, p. V05AT08A085. [Google Scholar] [CrossRef]
- Zoso, N.; Gosselin, C. Point-to-point motion planning of a parallel 3-dof underactuated cable-suspended robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2325–2330. [Google Scholar] [CrossRef]
- Jiang, X.; Barnett, E.; Gosselin, C. Dynamic point-to-point trajectory planning beyond the static workspace for six-DOF cable-suspended parallel robots. IEEE Trans. Robot. 2018, 34, 781–793. [Google Scholar] [CrossRef]
- Xiang, S.; Gao, H.; Liu, Z.; Gosselin, C. Trajectory Optimization for a Six-DOF Cable-Suspended Parallel Robot with Dynamic Motions Beyond the Static Workspace. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3903–3908. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value |
|---|---|
| Macro platform length | 2000 mm |
| Macro platform width | 2000 mm |
| Macro platform height (anchor point height difference) | 10 mm |
| Parallel cable spacing | 3464 mm |
| Total mass of macro platform, micro platform, and end effector | 100 kg |
| Minimum cable force limit (multiple of gravity) | 0.05 |
| Maximum cable force limit (multiple of gravity) | 2 |
| Parameters | Numerical Value |
|---|---|
| Maximum upper arm radius | 750 mm |
| Maximum lower arm radius | 750 mm |
| Short rod position PC connecting the upper and lower arms to the rotating arm | 100 mm |
| Upper and lower arm length CP | L |
| End platform radius | R |
| End Platform Radius R (mm) | 750 | 1000 | |
|---|---|---|---|
| Upper and Lower Arm Length L (mm) | |||
| 4000 |  |  | |
| 4500 |  |  | |
| 5000 |  |  | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qie, J.; Miao, Y.; Han, T.; Liu, H.; Shao, Z.; Chang, D. Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins. J. Mar. Sci. Eng. 2023, 11, 1063. https://doi.org/10.3390/jmse11051063
Qie J, Miao Y, Han T, Liu H, Shao Z, Chang D. Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins. Journal of Marine Science and Engineering. 2023; 11(5):1063. https://doi.org/10.3390/jmse11051063
Chicago/Turabian StyleQie, Jinbo, Yugang Miao, Tao Han, Huiju Liu, Zhufeng Shao, and Daofang Chang. 2023. "Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins" Journal of Marine Science and Engineering 11, no. 5: 1063. https://doi.org/10.3390/jmse11051063