
Effects of Strain-Softening and Strain-Rate Dependence on the Anchor Dragging Simulation of Clay through Large Deformation Finite Element Analysis

Abstract
:1. Introduction
2. Implementation of Soil Constitutive Models
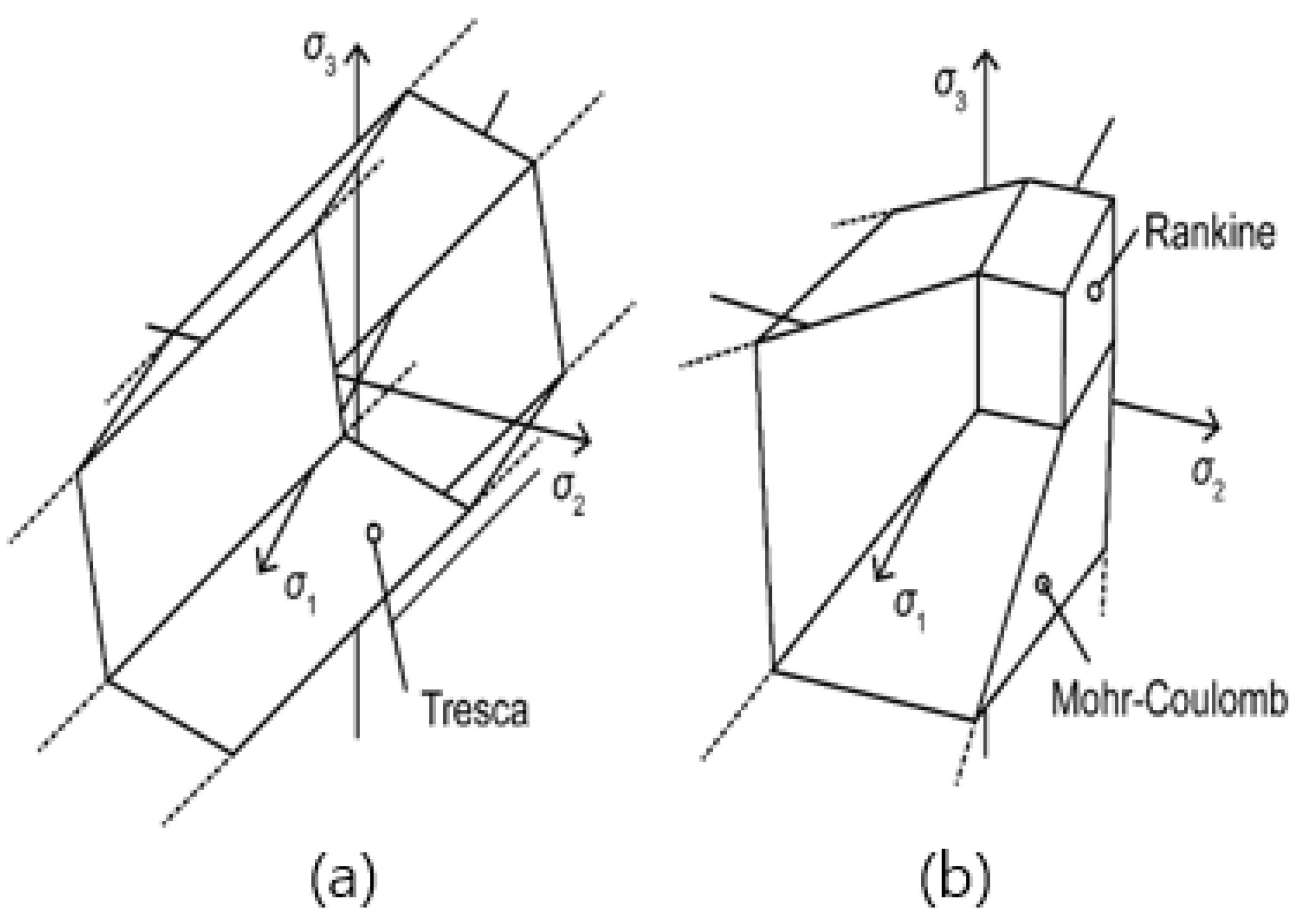
2.1. Failure Criterion
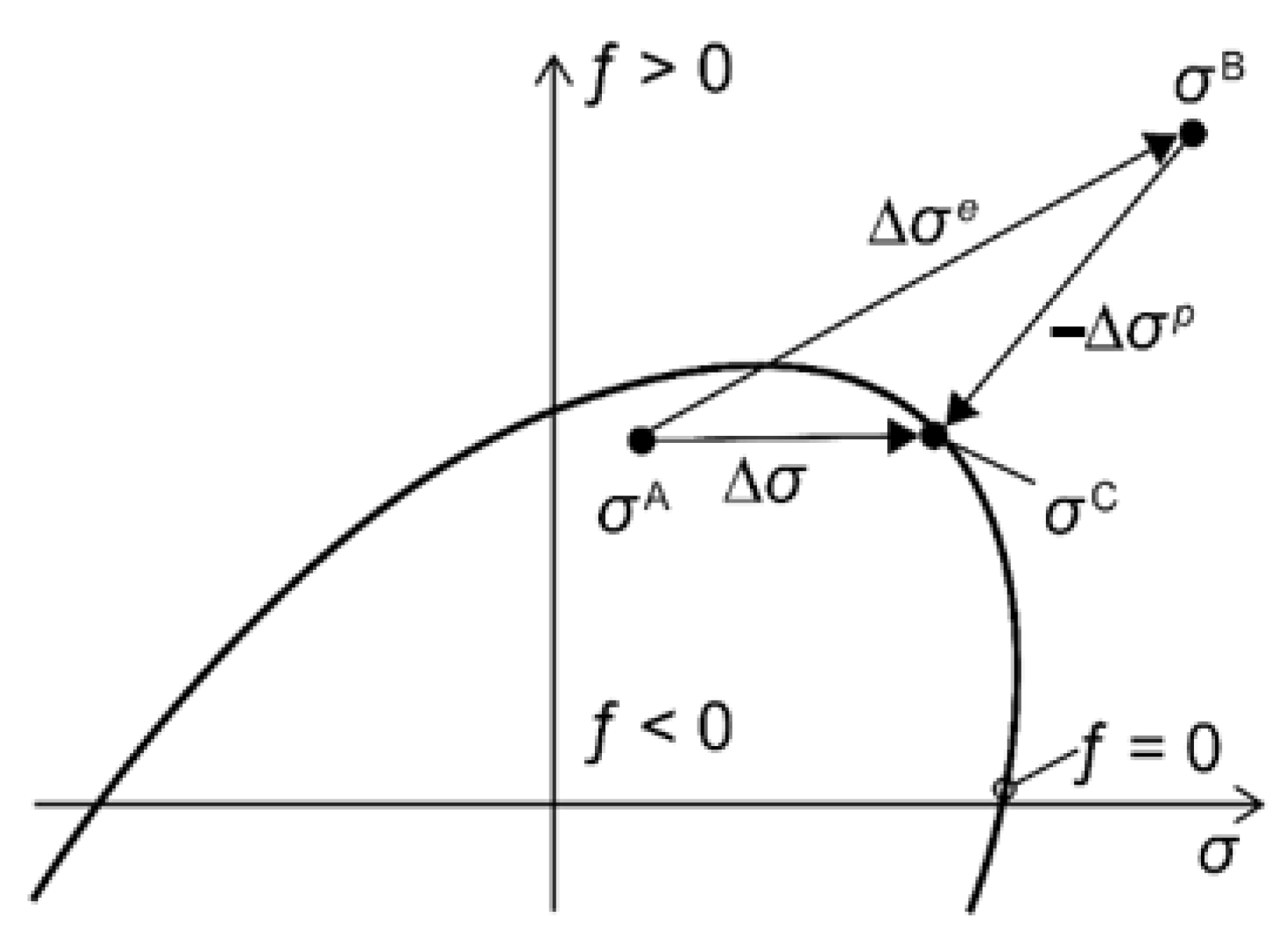
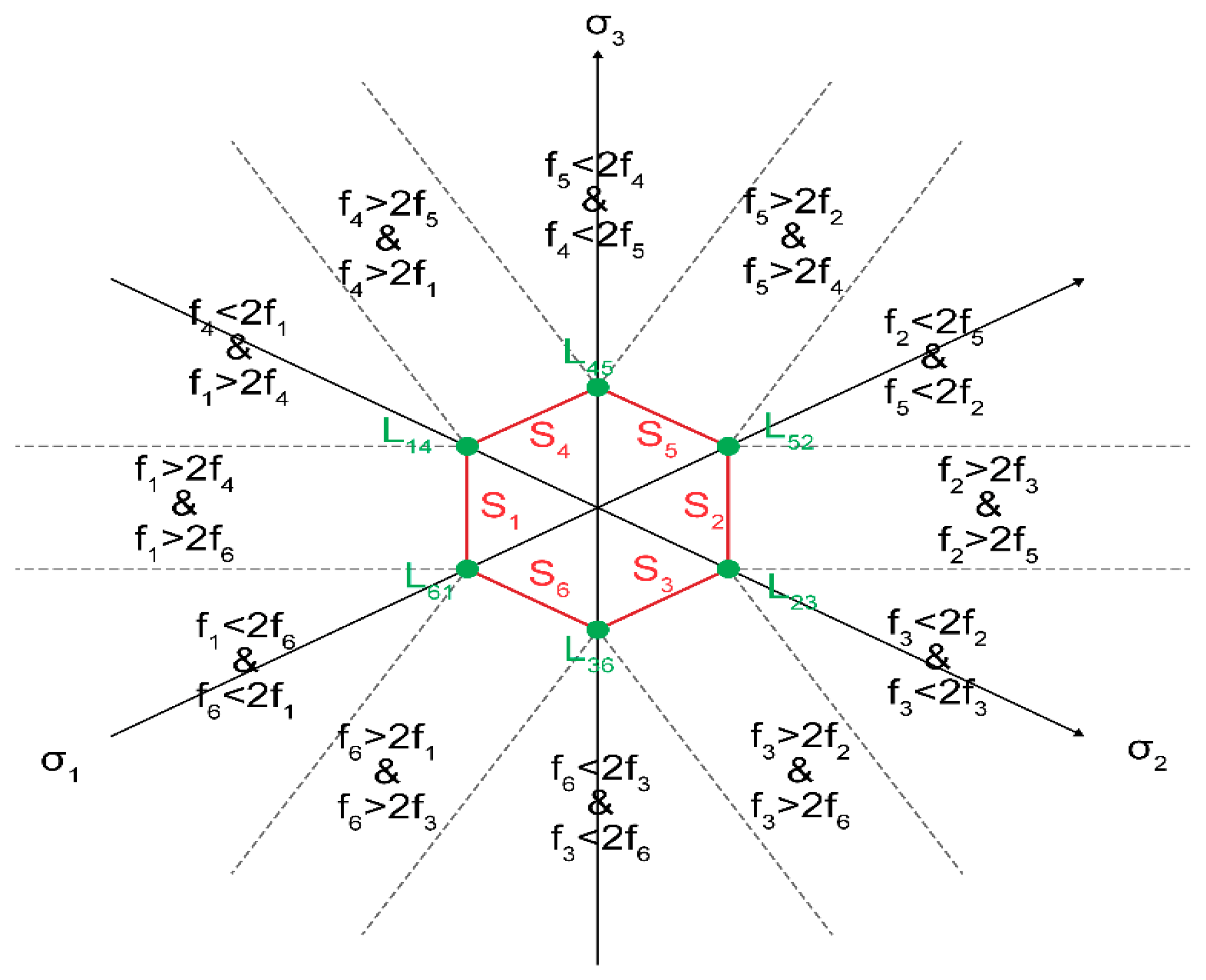
2.2. General Stress Return Mapping Algorithm
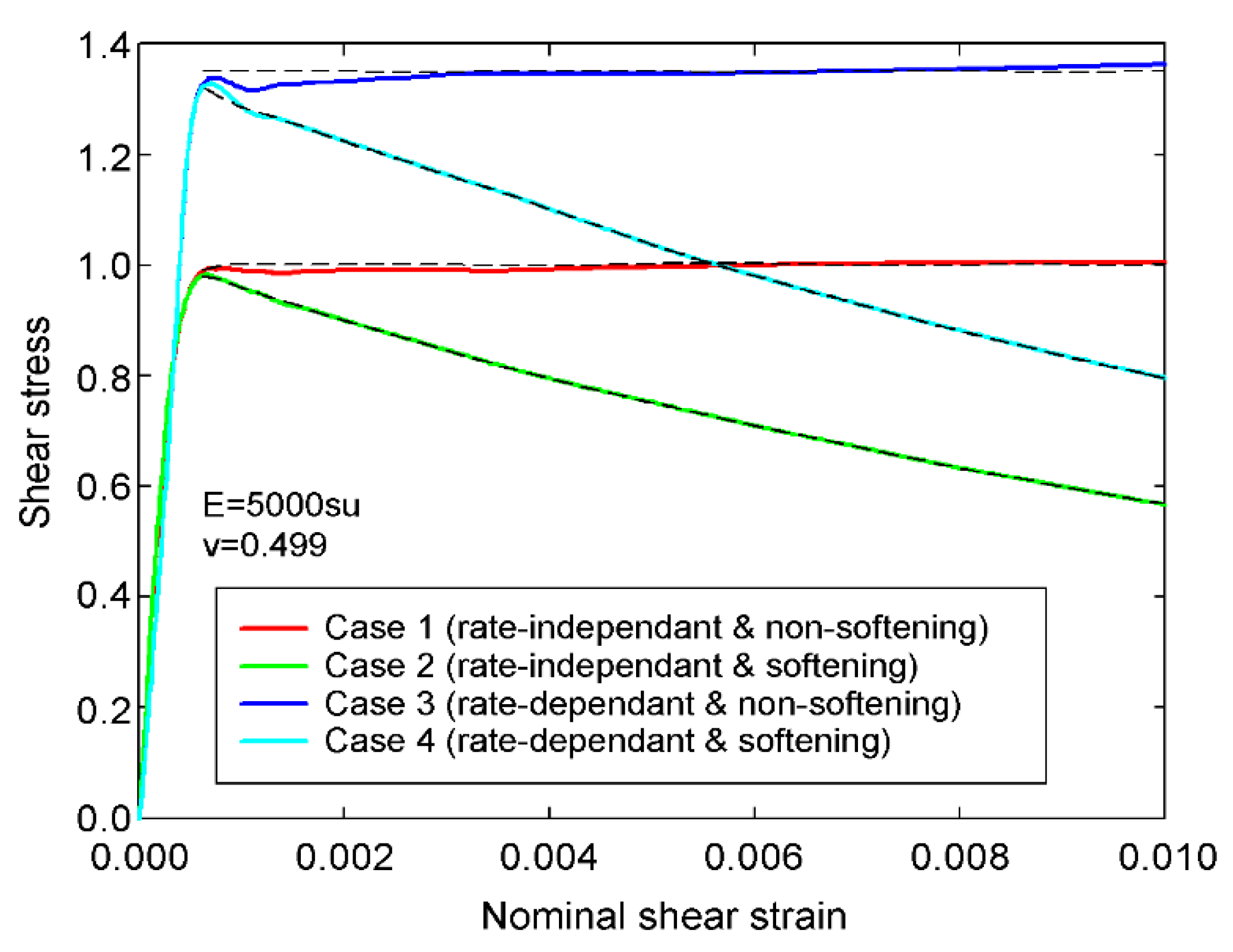
2.3. Strain-Softening and Strain-Rate Dependence
3. Verification of the TBSR–VUMAT Model
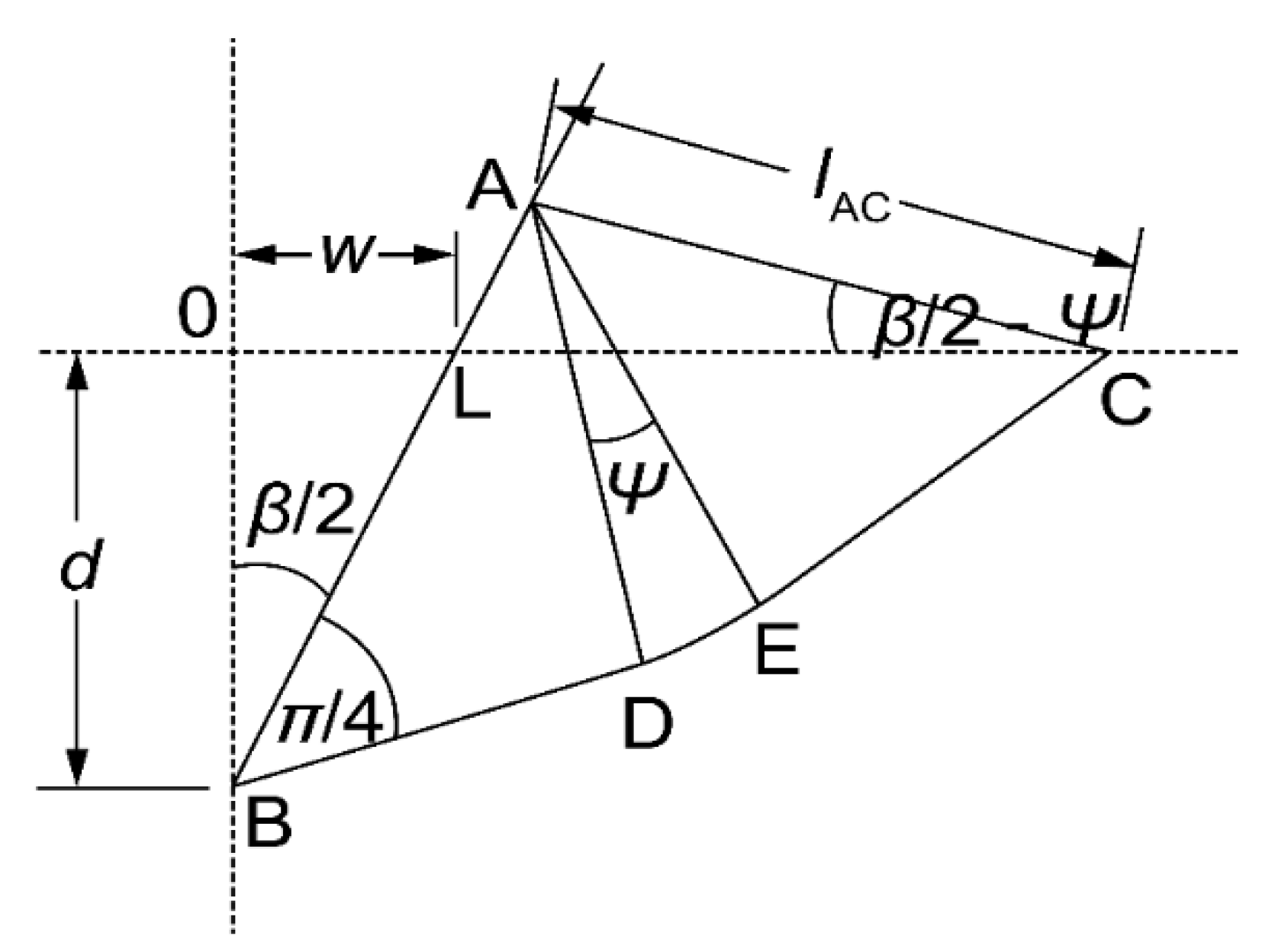
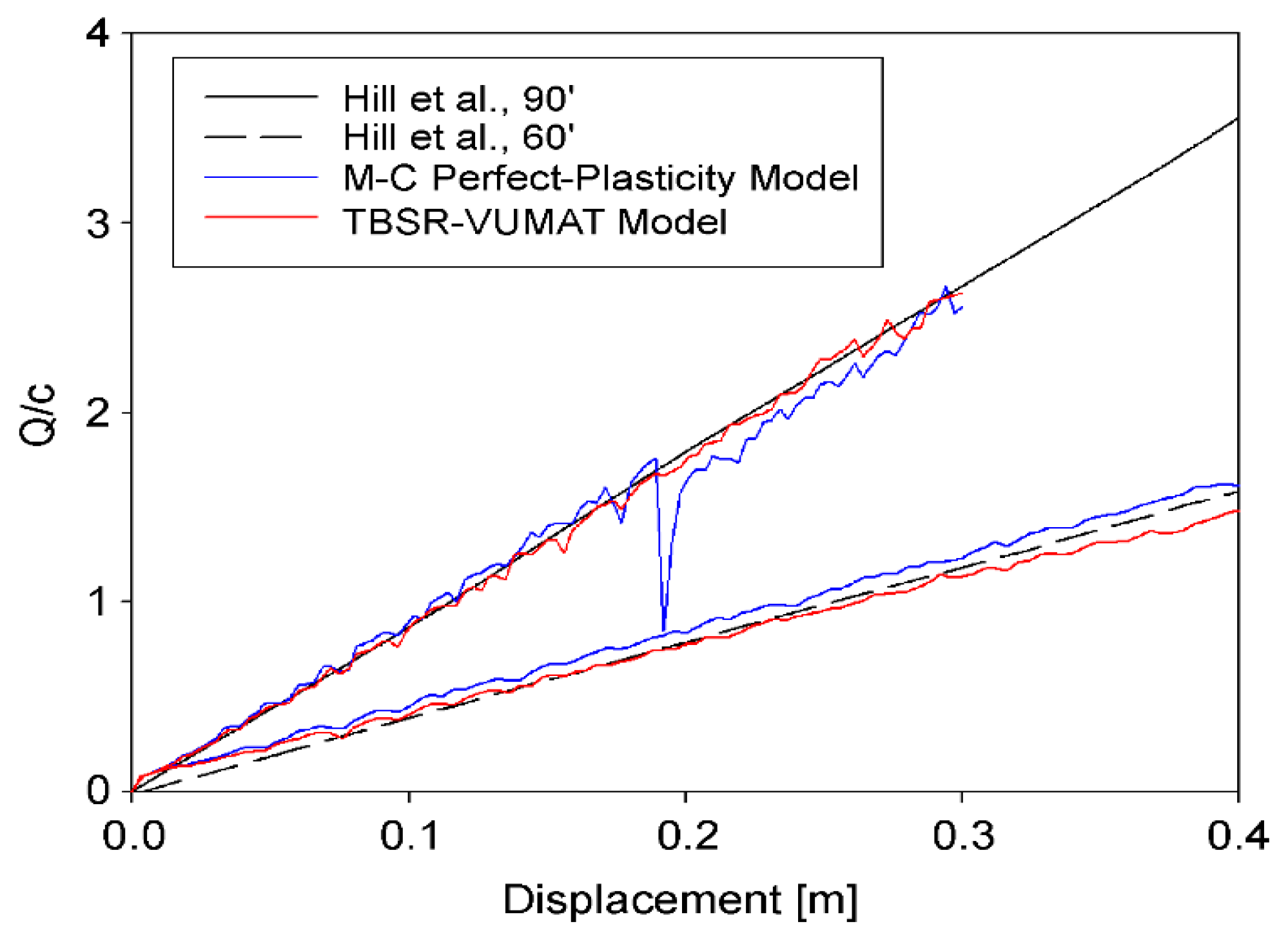
3.1. Effects on Failure Mechanisms
3.2. Validation of the TBSR–VUMAT Algorithm in the LDFE/CEL Model
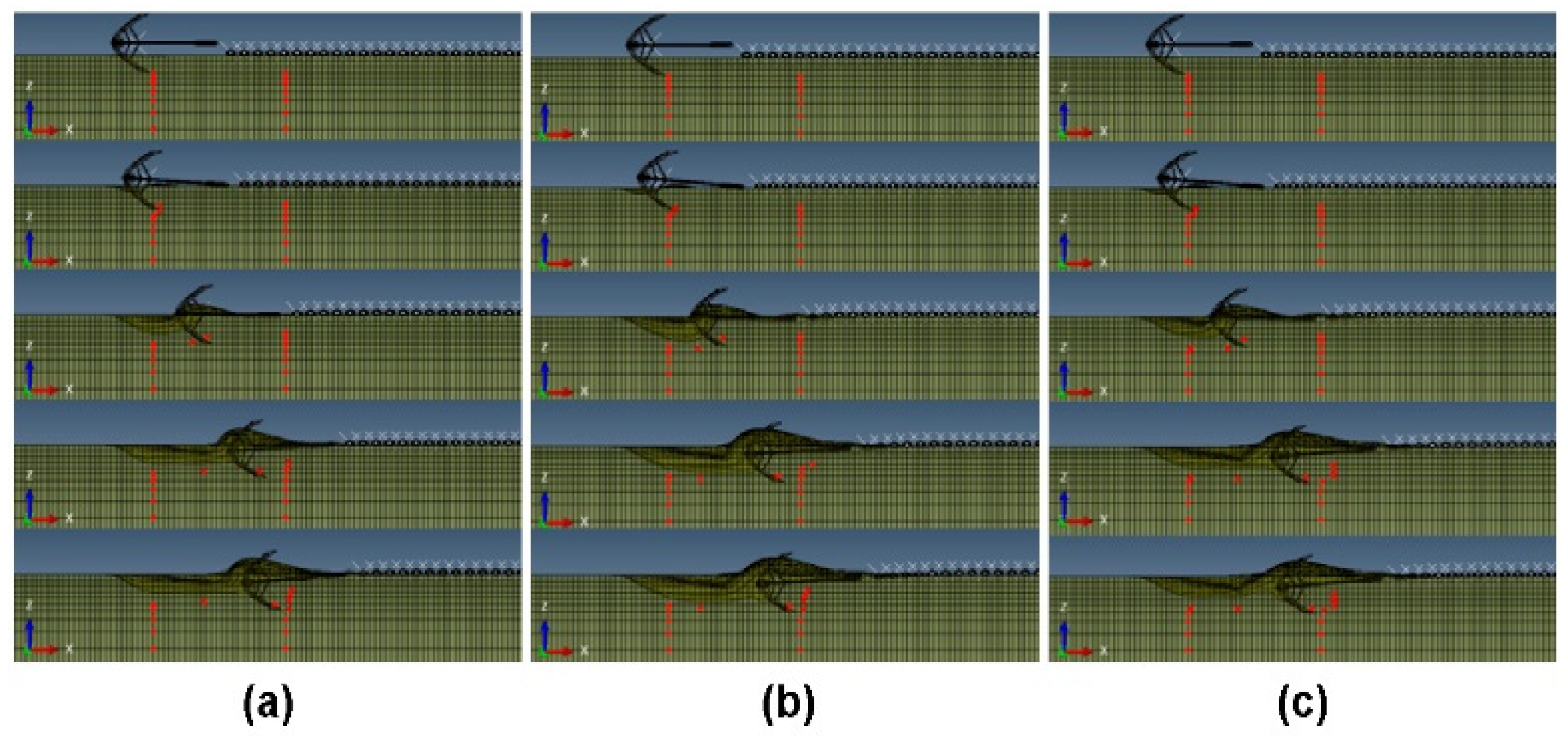
4. Anchor Dragging Simulation with TBSR–VUMAT Model
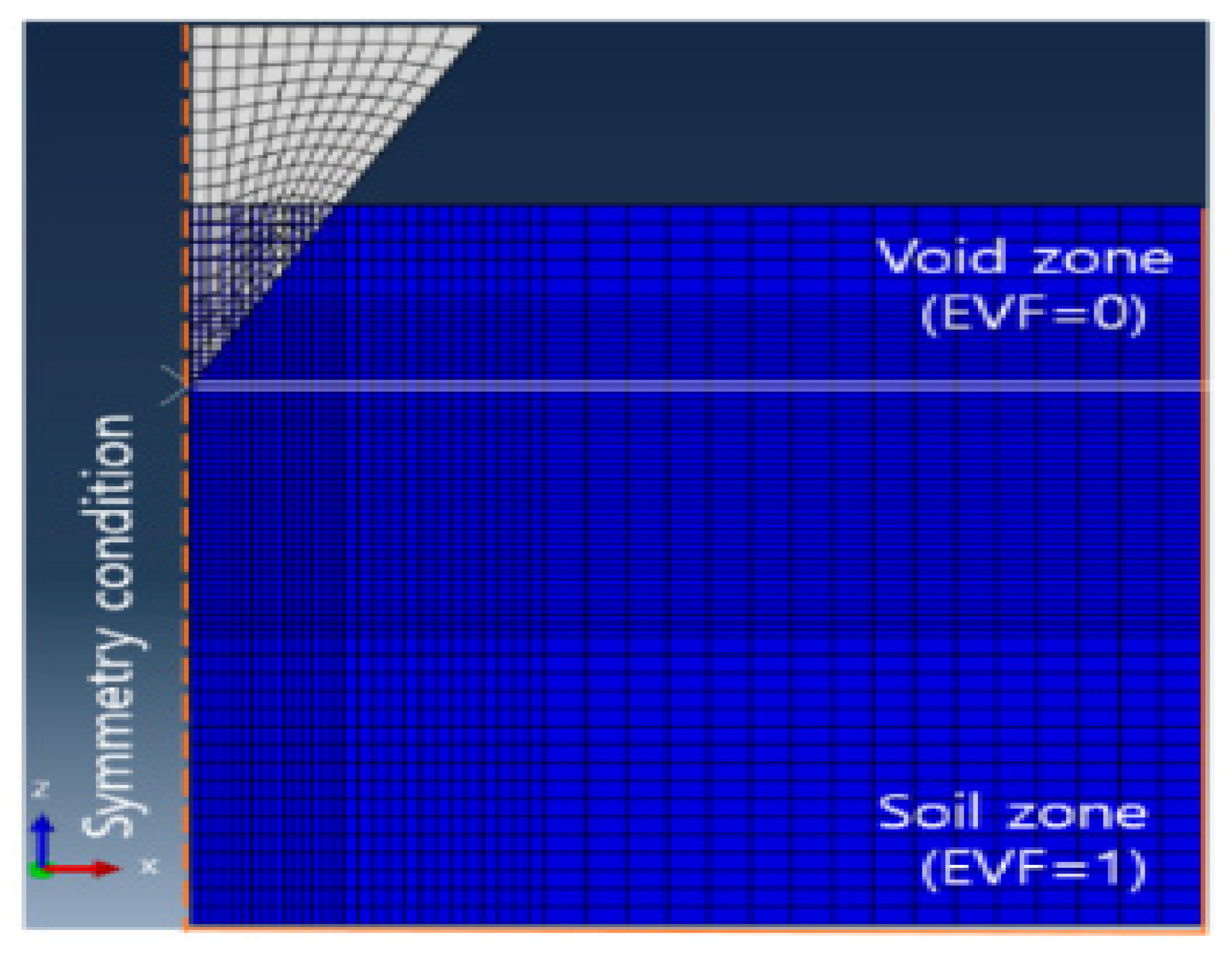
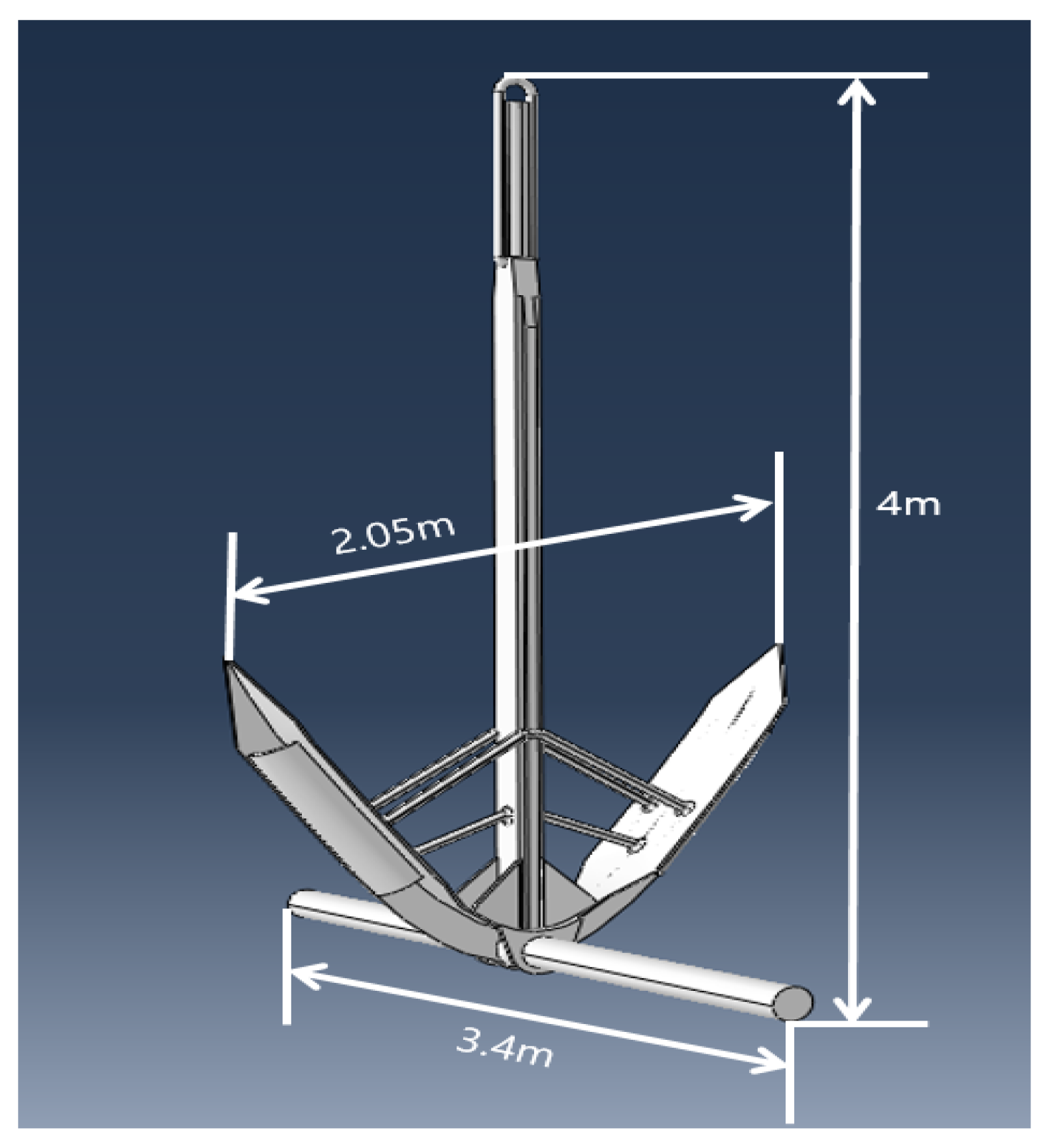
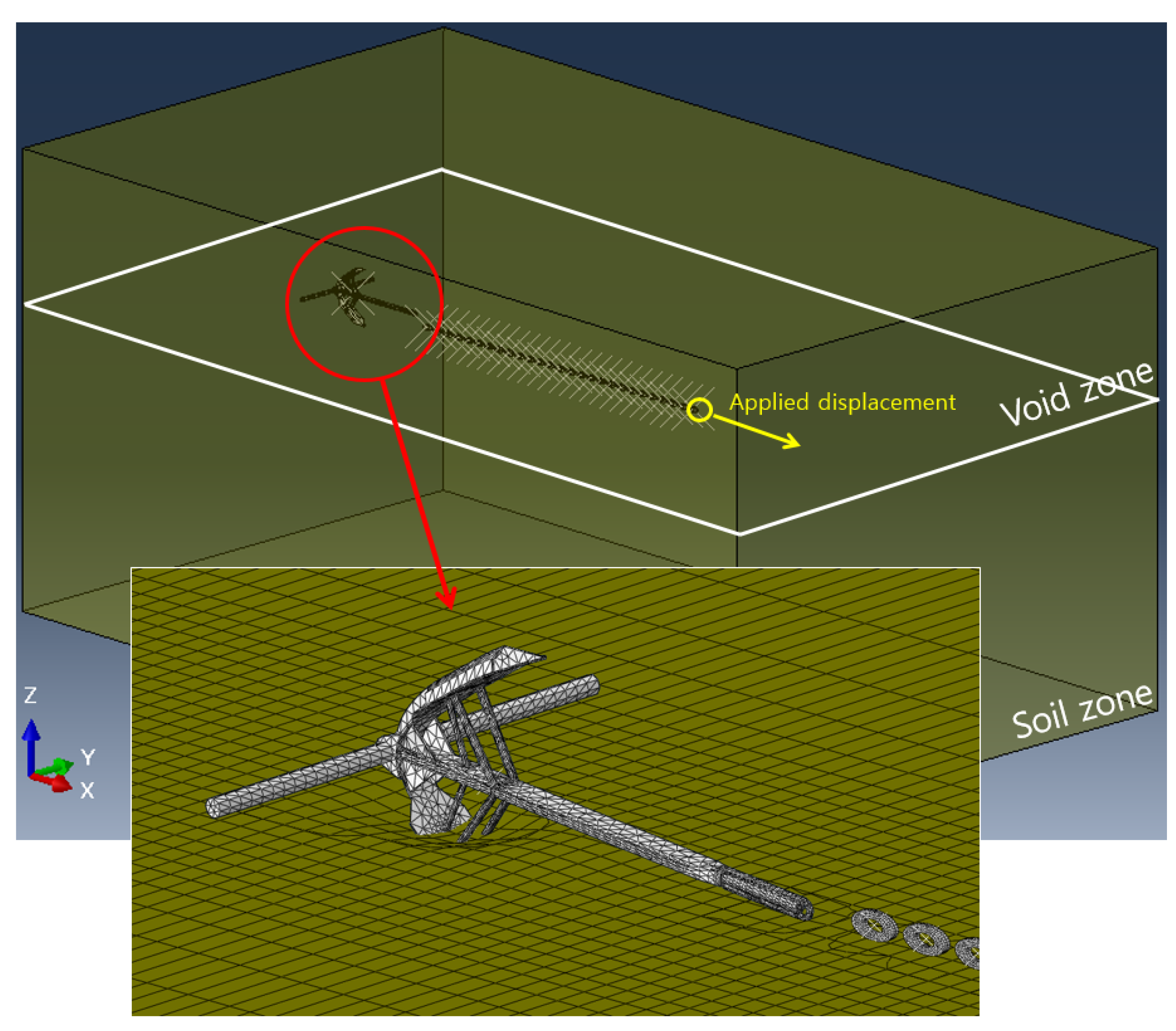
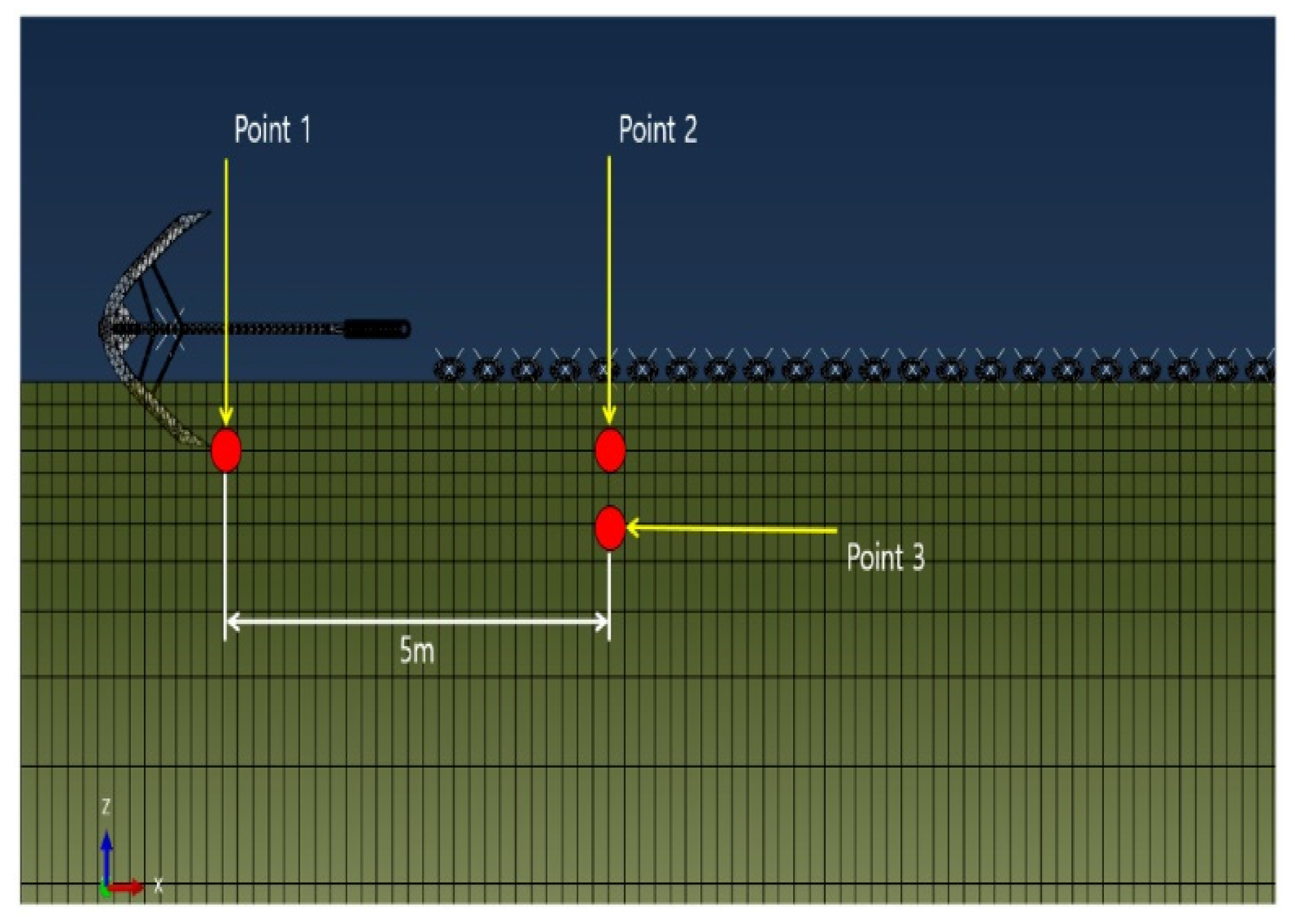
4.1. Description of the Numerical Model
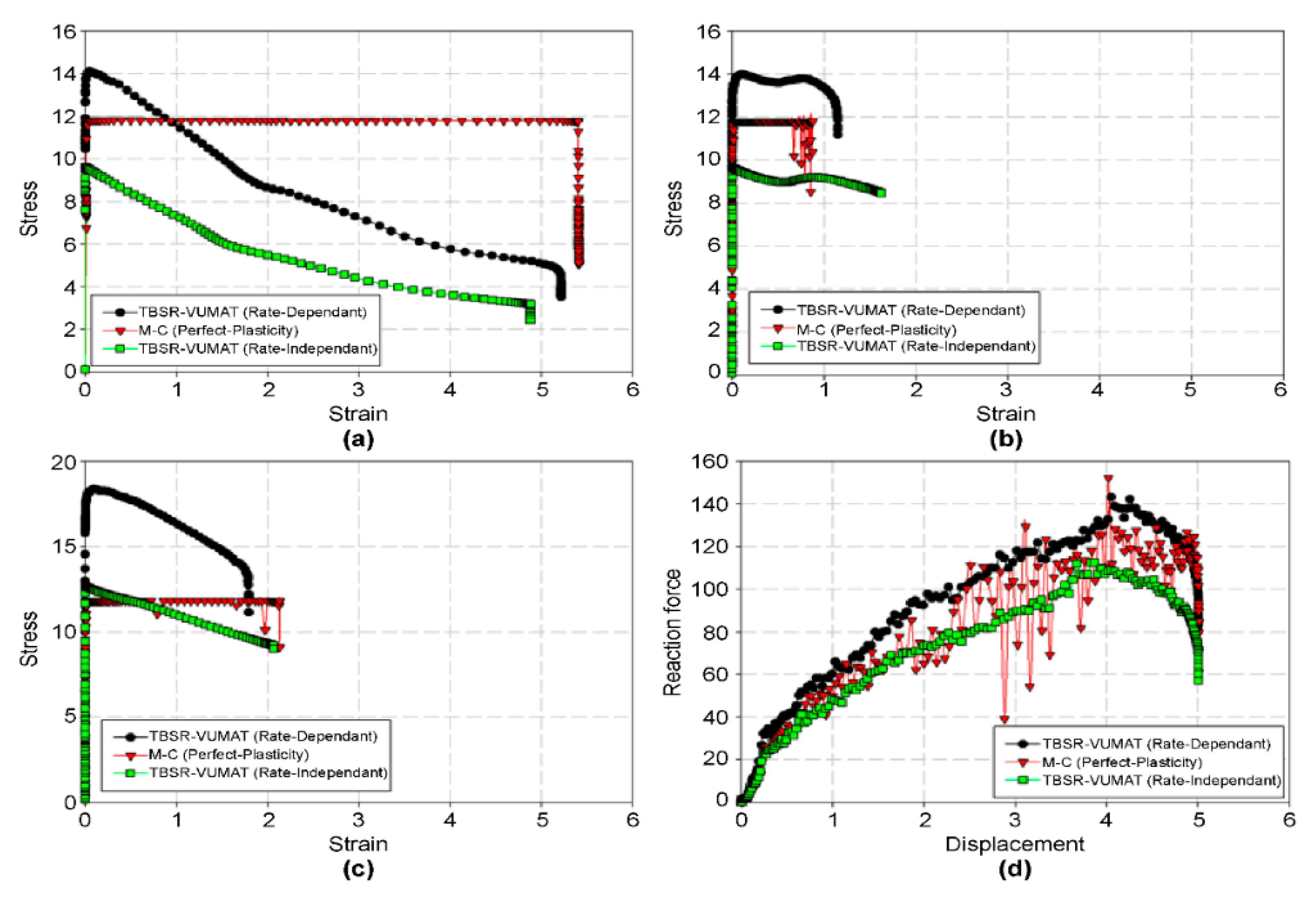
4.2. Results of the TBSR–VUMAT and M–C Models in the LDFE/CEL Model Analysis
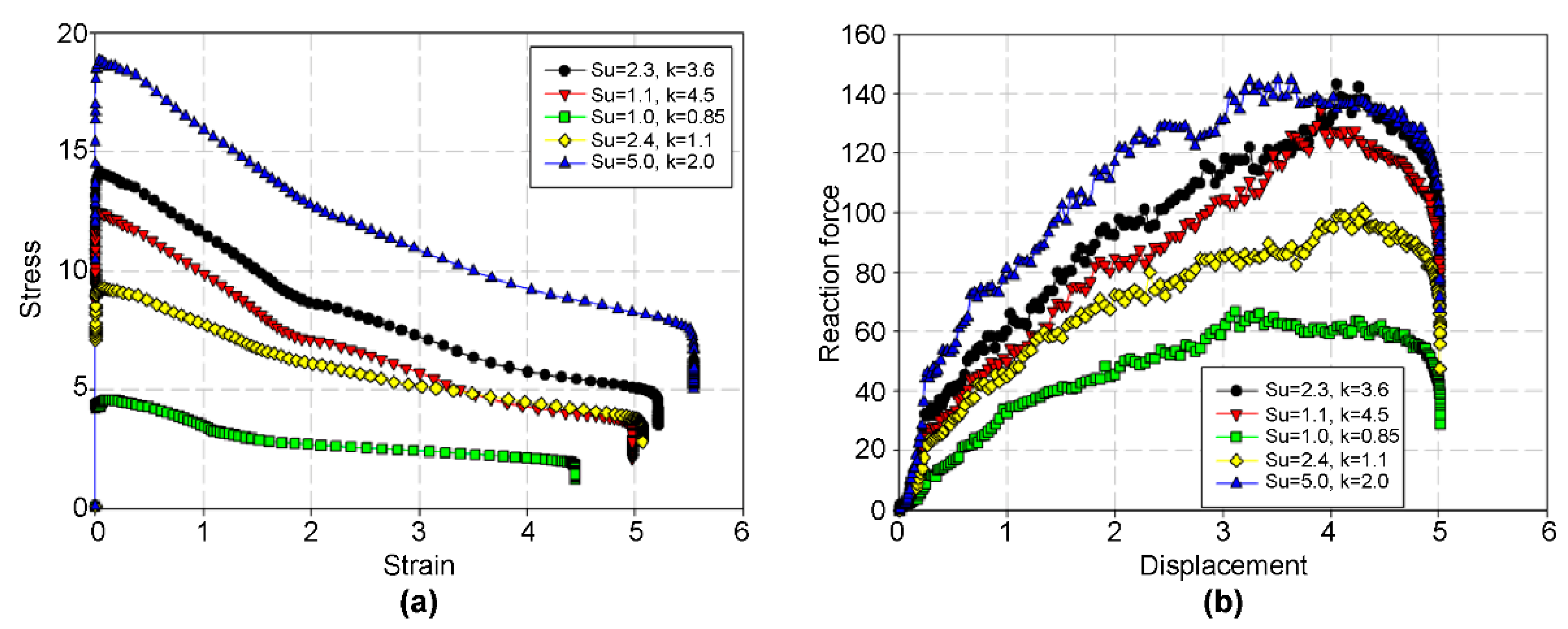
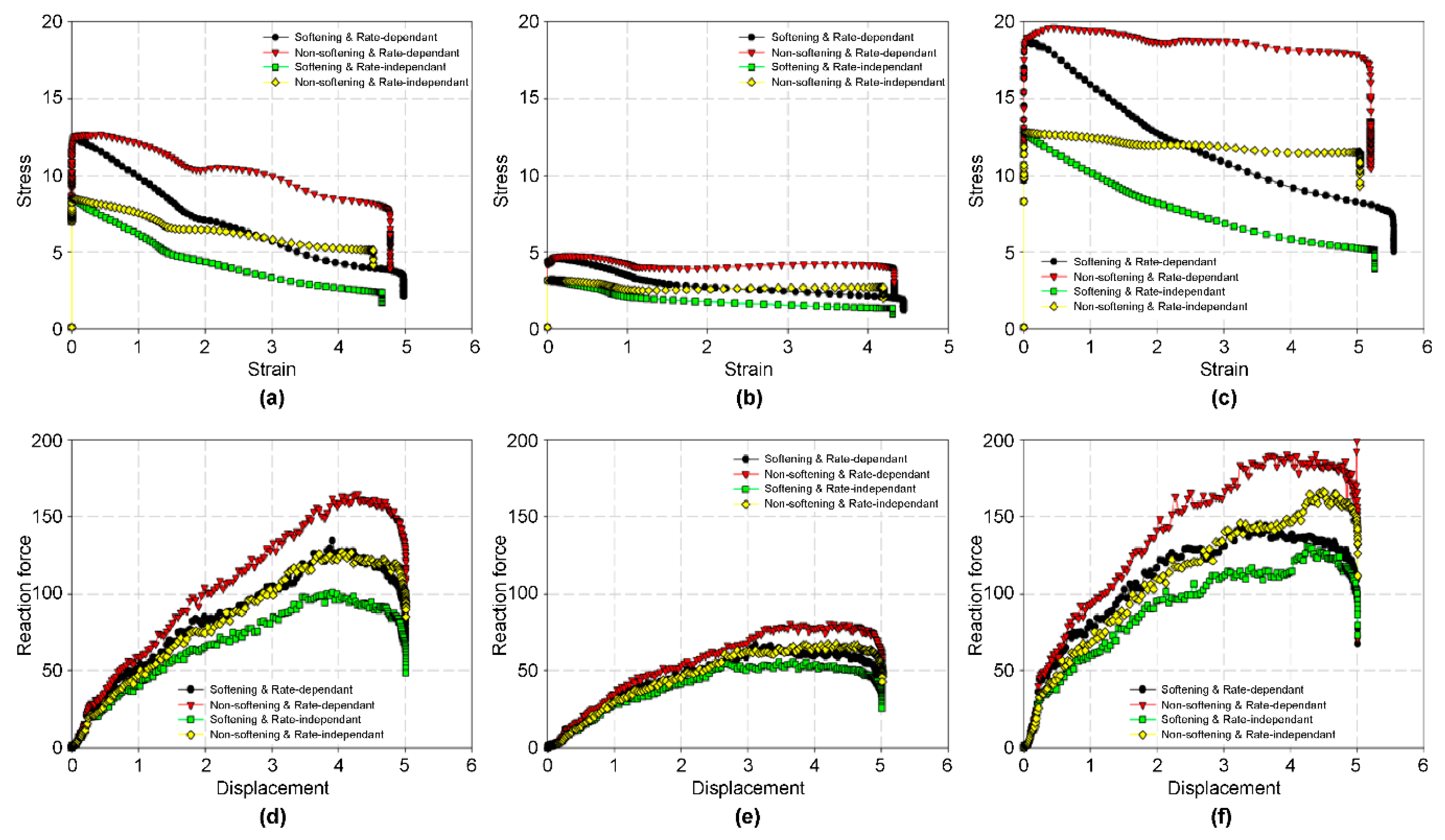
5. Parametric Study
5.1. Soil Behavior According to the Effect of Undrained Shear Strength
5.2. Anchor Penetration Depth Results According to the Effects of Undrained Shear Strength
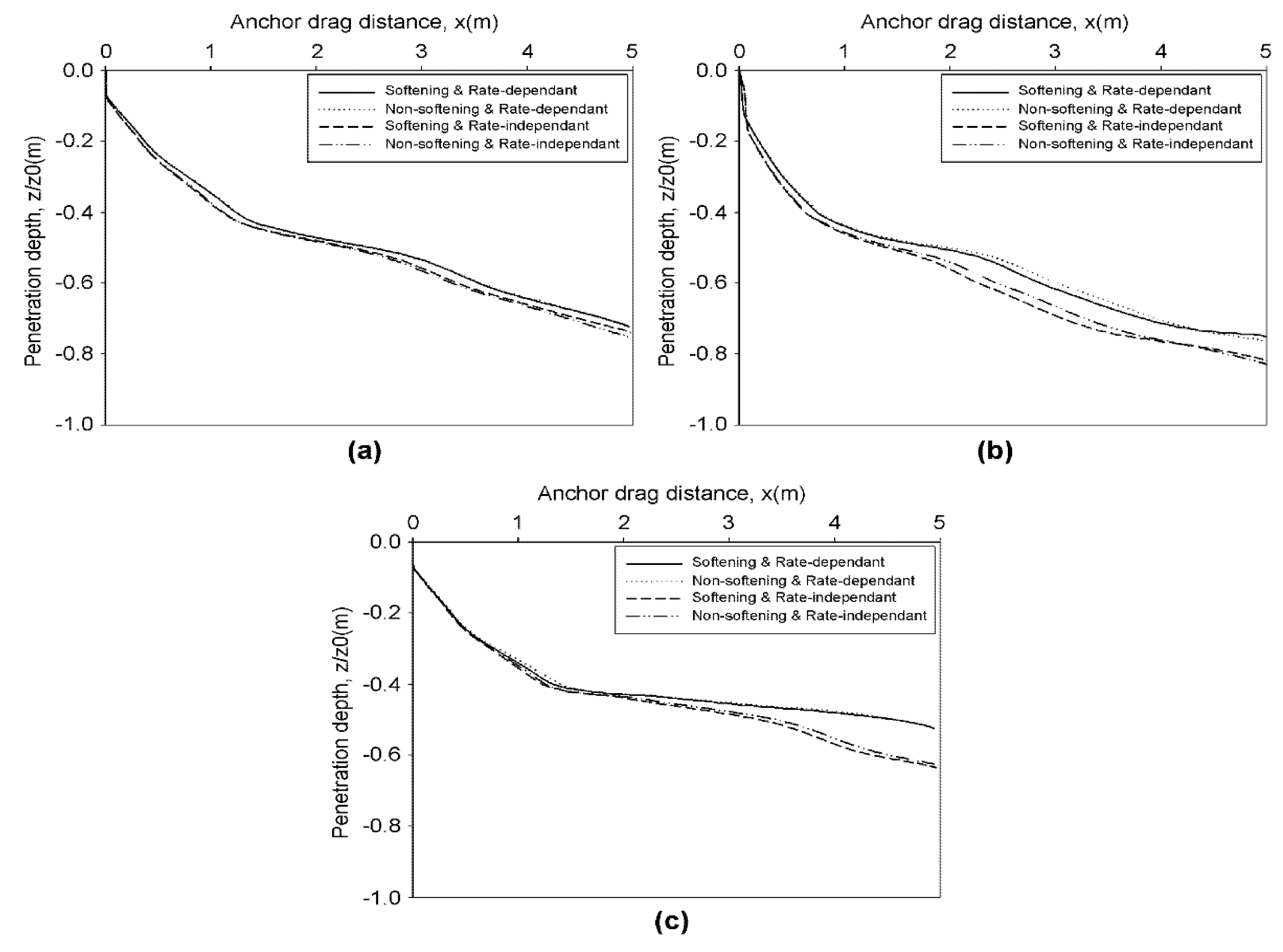
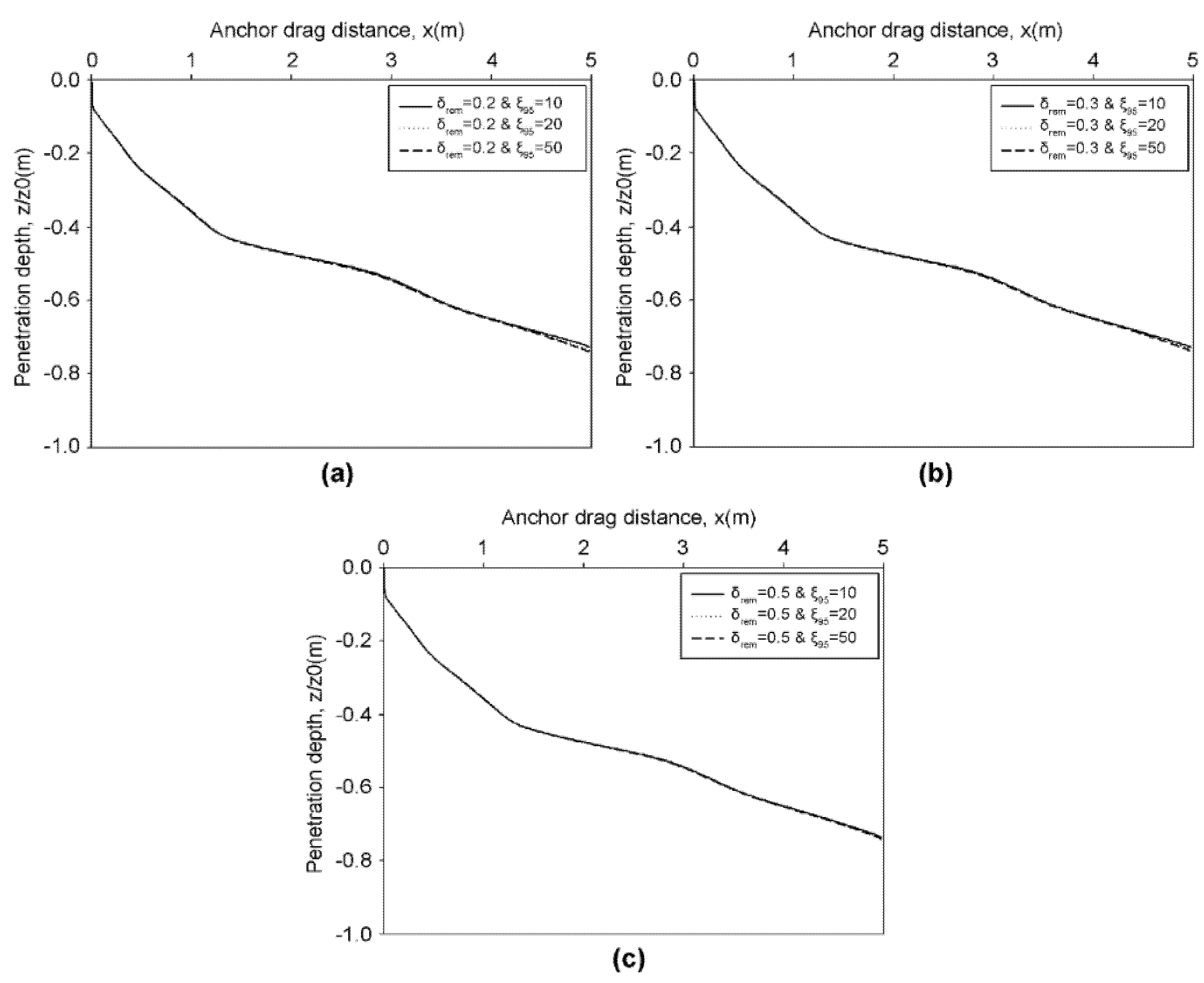
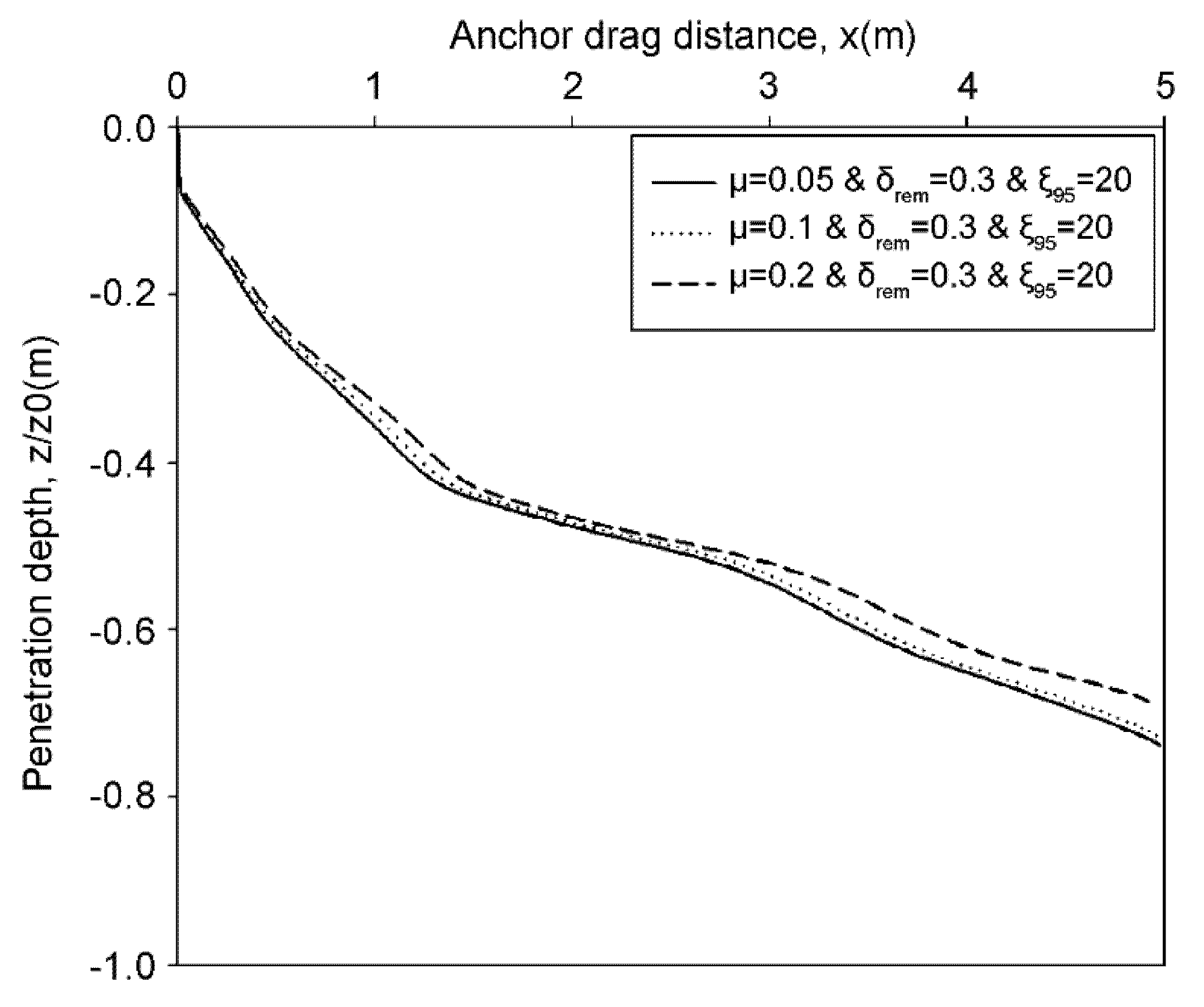
5.3. Anchor Penetration Depth According to the Effects of Strain-Softening and Strain-Rate Dependence
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, Y.H.; Jeong, S.S. Analysis of Dynamically Penetrating Anchor Based on Coupled Eulerian-Lagrangian (CEL) Method. J. Korean Soc. Civ. Eng. 2014, 34, 895–906. [Google Scholar] [CrossRef] [Green Version]
- Han, C.C.; Chen, X.J.; Liu, J. Physical and Numerical Modeling of Dynamic Penetration of Ship Anchor in Clay. J. Waterw. Port Coast. Ocean Eng. 2019, 145, 04018030. [Google Scholar] [CrossRef]
- Shin, M.B.; Park, D.S.; Seo, Y.K. Design of Rock-Berm by Anchor Dragging Simulation Using CEL Method. J. Ocean Eng. Technol. 2017, 31, 397–404. [Google Scholar] [CrossRef] [Green Version]
- Hossain, M.S.; Kim, Y.H.; Gaudin, C. Experimental Investigation of Installation and Pull-Out of Dynamically Penetrating Anchors in Clay and Silt. J. Geotech. Geoenviron. Eng. 2014, 140, 04014026. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.H.; Hossain, M.S. Dynamic Installation of OMNI-Max Anchors in Clay: Numerical Analysis. Géotechnique 2015, 65, 1029–1037. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.X.; Xu, K.; Zhao, Y.B. Numerical Investigation on the Penetration of Gravity Installed Anchors by a Coupled Eulerian-Lagrangian Approach. Appl. Ocean Res. 2016, 60, 94–108. [Google Scholar] [CrossRef]
- Hamann, T.B.; Qiu, G.; Grabe, J.G. Application of a Coupled Eulerian-Lagrangian Approach on Pile Installation Problems Under Partially Drained Conditions. Comput. Geotech. 2015, 63, 279–290. [Google Scholar] [CrossRef]
- Bhattacharya, P. Pullout Capacity of Strip Plate Anchor in Cohesive Sloping Ground Under Undrained Condition. Comput. Geotech. 2016, 78, 134–143. [Google Scholar] [CrossRef]
- Merifield, R.S.; Lyamin, A.V.; Sloan, S.W. Stability of Inclined Strip Anchors in Purely Cohesive Soil. J. Geotech. Geoenviron. Eng. 2005, 131, 792–799. [Google Scholar] [CrossRef]
- Song, Z.; Hu, Y.; Randolph, M.F. Numerical Simulation of Vertical Pullout of Plate Anchors in Clay. J. Geotech. Geoenviron. Eng. 2008, 134, 866–875. [Google Scholar] [CrossRef]
- Wang, D.; Hu, Y.; Randolph, M.F. Three-Dimensional Large Deformation Finite-Element Analysis of Plate Anchors in Uniform Clay. J. Geotech. Geoenviron. Eng. 2010, 136, 355–365. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, X.W.; Zhou, M.; Hu, Y.X. Inner Soil Heave of Stiffened Caisson During Installation in Soft-Over-Stiff Clay. Comput. Geotech. 2021, 138, 104336. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, M.; Hu, Y.; Shazzad Hossain, M. Interpretation of Layer Boundaries and Shear Strengths for Soft-Stiff-Soft Clays Using CPT Data: LDFE Analyses. J. Geotech. Geoenviron. Eng. 2016, 142, 04015055. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Yin, F.; Li, Z.; Liu, Y.B. Numerical Simulation of Drag Anchor Trajectory in Non-linear Soil Based on CEL Method. In Proceedings of the 31st International Ocean and Polar Engineering Conference, Rhodes, Greece, 20–25 June 2021; pp. 1339–1345. [Google Scholar]
- Liu, H.X.; Liang, K.; Peng, J.S.; Xiao, Z. A Unified Explicit Formula for Calculating the Maximum Embedment Loss of Deepwater Anchors in Clay. Ocean Eng. 2021, 236, 109454. [Google Scholar] [CrossRef]
- Cassidy, M.J. Experimental Observations of the Penetration of Spudcan Footings in Silt. Géotechnique 2012, 62, 727–732. [Google Scholar] [CrossRef]
- Clausen, J.; Damkilde, L.; Andersen, L. Efficient Return Algorithms for Associated Plasticity With Multiple Yield Planes. Int. J. Numer. Methods Eng. 2006, 66, 1036–1059. [Google Scholar] [CrossRef]
- ABAQUS. ABAQUS User’s Manual; Dssault Systems; ABAQUS: Paris, France, 2018. [Google Scholar]
- Einav, I.; Randolph, M.F. Combining Upper Bound and Strain Path Methods for Evaluating Penetration Resistance. Int. J. Numer. Methods Eng. 2005, 63, 1991–2016. [Google Scholar] [CrossRef]
- Zhou, H.; Randolph, M.F. Computational Techniques and Shear Band Development for Cylindrical and Spherical Penetrometers in Strain-Softening Clay. Int. J. Geomech. 2007, 7, 287–295. [Google Scholar] [CrossRef]
- Wilkins, M. Calculation of Elastoplastic Flows. Methods Comp. Physiol. 1964, 3, 211–263. [Google Scholar]
- Maenchen, G.; Sack, S. The Tensor Code. Methods Comp. Physiol. 1964, 3, 12–35. [Google Scholar]
- Kong, D. Large Displacement Numerical Analysis of Offshore Pipe-Soil Interaction on Clay. Ph.D. Thesis, University of Oxford, Oxford, UK, 2015. [Google Scholar]
- Hazell, E. Numerical and Experimental Studies of Shallow Con Penetration in Clay. Ph.D. Thesis, University of Oxford, Oxford, UK, 2008. [Google Scholar]
- Hill, R.; Lee, E.H.; Tupper, S.J. The Theory of Wedge Indentation of Ductile Materials. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1945, 188, 273–290. [Google Scholar]
- Hossain, M.S.; Randolph, M.F. Effect of Strain Rate and Strain Softening on the Penetration Resistance of Spudcan Foundations on Clay. Int. J. Geomech. 2009, 9, 122–132. [Google Scholar] [CrossRef]
- Das, B.M. Principles of Geotechnical Engineering, 7th ed.; Cengage Learning: Sacramento, CA, USA, 2002. [Google Scholar]
- Dingle, H.R.C.; White, D.J.; Gaudin, C. Mechanisms of Pipe Embedment and Lateral Breakout on Soft Clay. Can. Geotech. J. 2008, 45, 636–652. [Google Scholar] [CrossRef]
- Ryu, D.M.; Lee, C.S.; Choi, K.H.; Koo, B.Y.; Song, J.K.; Kim, M.H.; Lee, J.M. Lab-Scale Impact Test to Investigate the Pipe-Soil Interaction and Comparative Study to Evaluate Structural Responses. Int. J. Nav. Arch. Ocean Eng. 2015, 7, 720–738. [Google Scholar] [CrossRef]
- Lee, Y.S. Physical and Numerical Modelling of Pipe-Soil Interaction in Clay. Ph.D. Thesis, The University of Sheffield, Sheffield, UK, 2012. [Google Scholar]
- Zimmerman, E.H.; Smith, M.W.; Shelton, J.T. Efficient Gravity Installed Anchor for Deep Water Mooring. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 4 May 2009. paper OTC20117. [Google Scholar]
- Randolph, M.F. Characterization of Soft Sediments for Offshore Applications. In Proceedings of the 2nd International Conference on Site Characterization, Porto, Portugal, 1 January 2004; pp. 209–231. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strain Rate | Strain Softening | ||
|---|---|---|---|
| µ | |||
| Case 1 | 0 | 1 | 1 |
| Case 2 | 0 | 0.01 | 0.05 |
| Case 3 | 0.1 | 1 | 1 |
| Case 4 | 0.1 | 0.01 | 0.05 |
(kPa) | (kg/m3) | c (kPa) | |||
|---|---|---|---|---|---|
| Clay | 1600 | 0.49 | 1611 | 0.01 | 5.9 |
(kPa) | (kPa/m) | Amp | ||||||
|---|---|---|---|---|---|---|---|---|
| Clay | 1600 | 0.49 | 2.3 | 3.6 | 0.3 | 20 | 0.1 | 1 |
| Strain Rate | Strain Softening | |
|---|---|---|
| Viscosity Parameter of Soil | Remolded Strenght Ratio of Soil | Ductility Parameter of Soil |
| 0.05, 0.1, 0.2 | 0.2, 0.3, 0.5 | 10, 20, 50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, M.-B.; Park, D.-S.; Seo, Y.-K. Effects of Strain-Softening and Strain-Rate Dependence on the Anchor Dragging Simulation of Clay through Large Deformation Finite Element Analysis. J. Mar. Sci. Eng. 2022, 10, 1734. https://doi.org/10.3390/jmse10111734
Shin M-B, Park D-S, Seo Y-K. Effects of Strain-Softening and Strain-Rate Dependence on the Anchor Dragging Simulation of Clay through Large Deformation Finite Element Analysis. Journal of Marine Science and Engineering. 2022; 10(11):1734. https://doi.org/10.3390/jmse10111734
Chicago/Turabian StyleShin, Mun-Beom, Dong-Su Park, and Young-Kyo Seo. 2022. "Effects of Strain-Softening and Strain-Rate Dependence on the Anchor Dragging Simulation of Clay through Large Deformation Finite Element Analysis" Journal of Marine Science and Engineering 10, no. 11: 1734. https://doi.org/10.3390/jmse10111734