
A Measurement System to Monitor Propulsion Performance and Ice-Induced Shaftline Dynamic Response of Icebreakers


Abstract
:1. Introduction
1.1. Environmental and Economic Framework
1.2. Role of the Marine Industry
1.3. Contribution of the Present Work
2. Materials and Methods
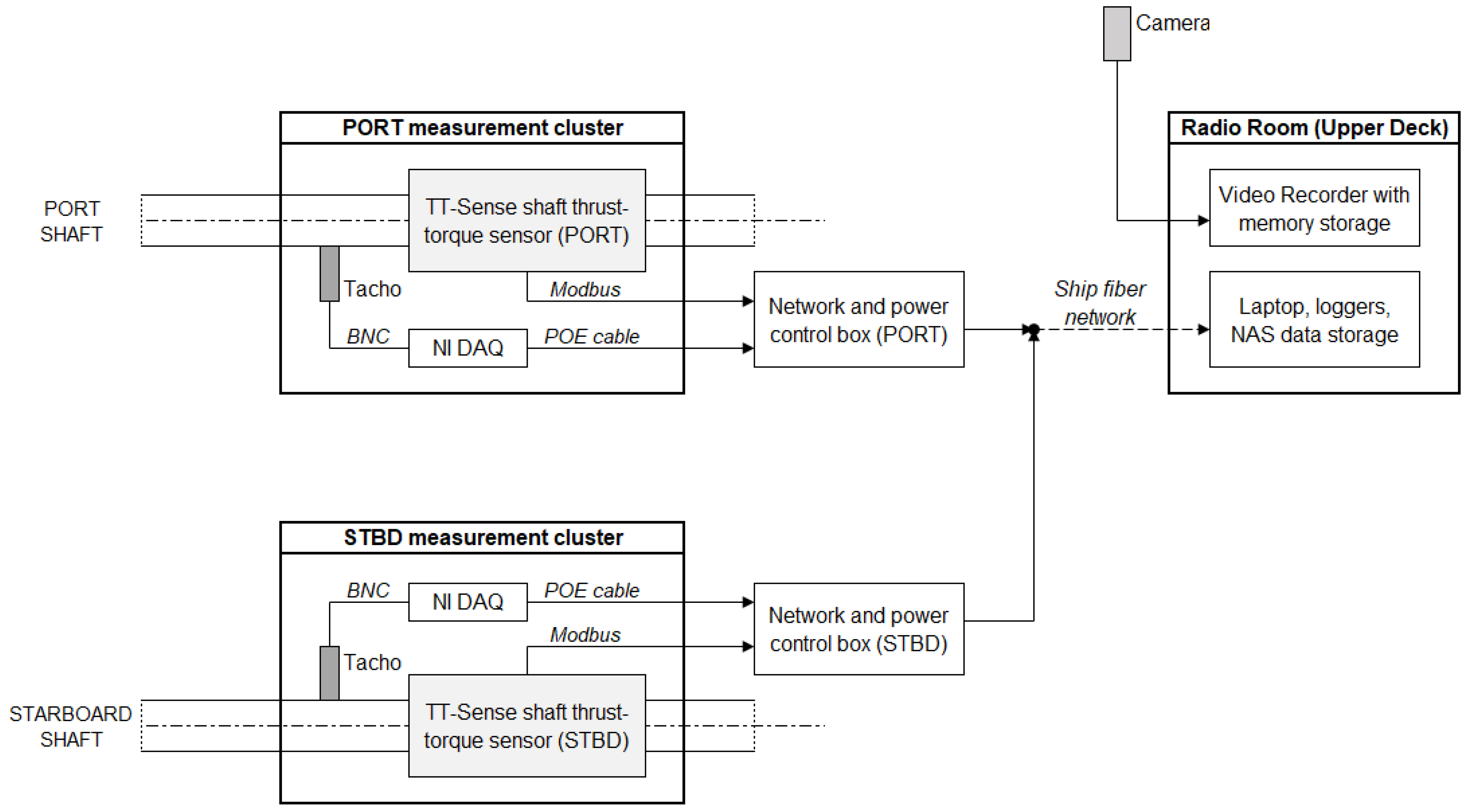
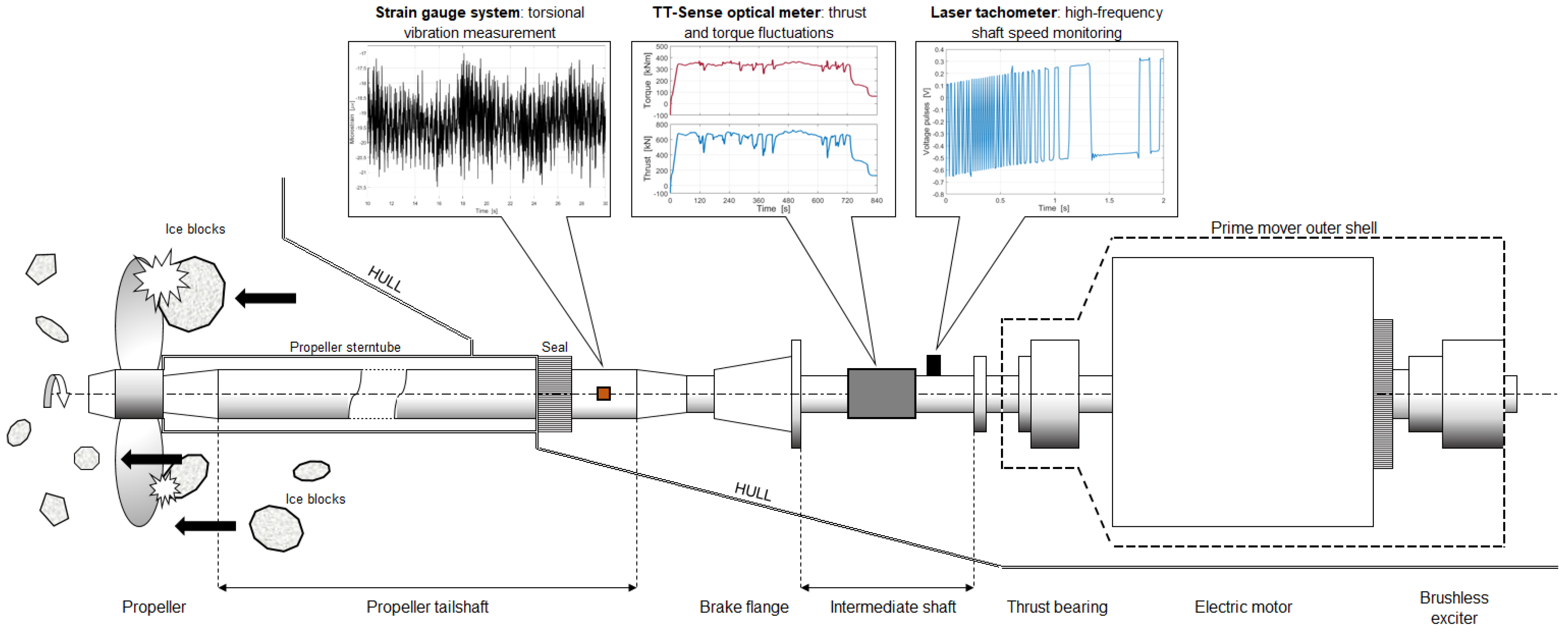
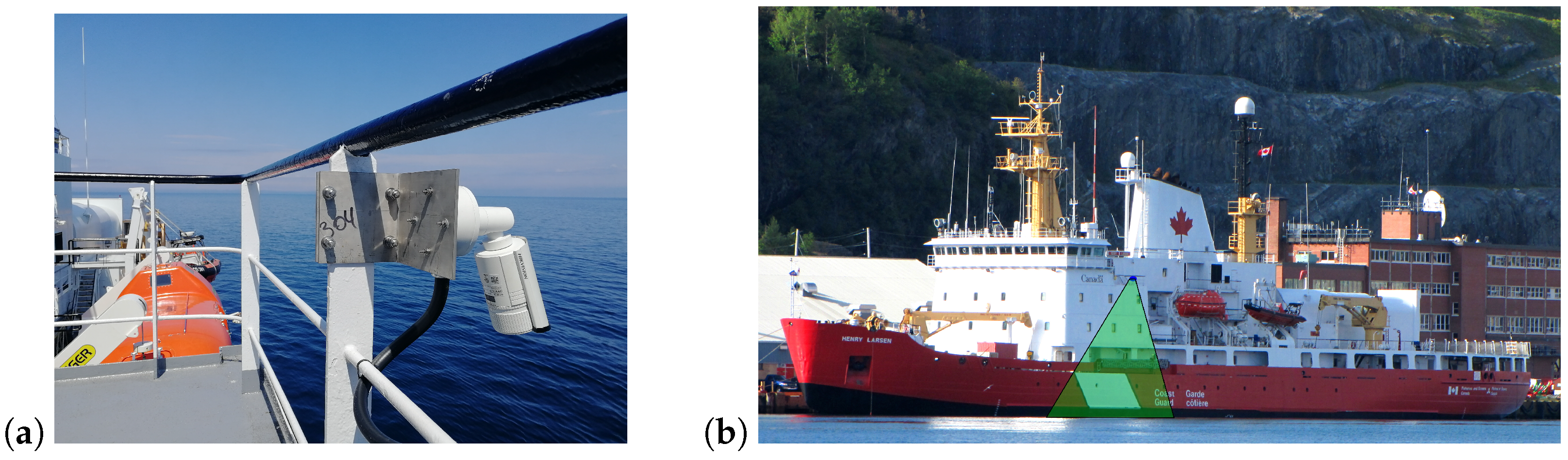
2.1. Overview of the Instrumentation Set and Description of the Case Study Vessel
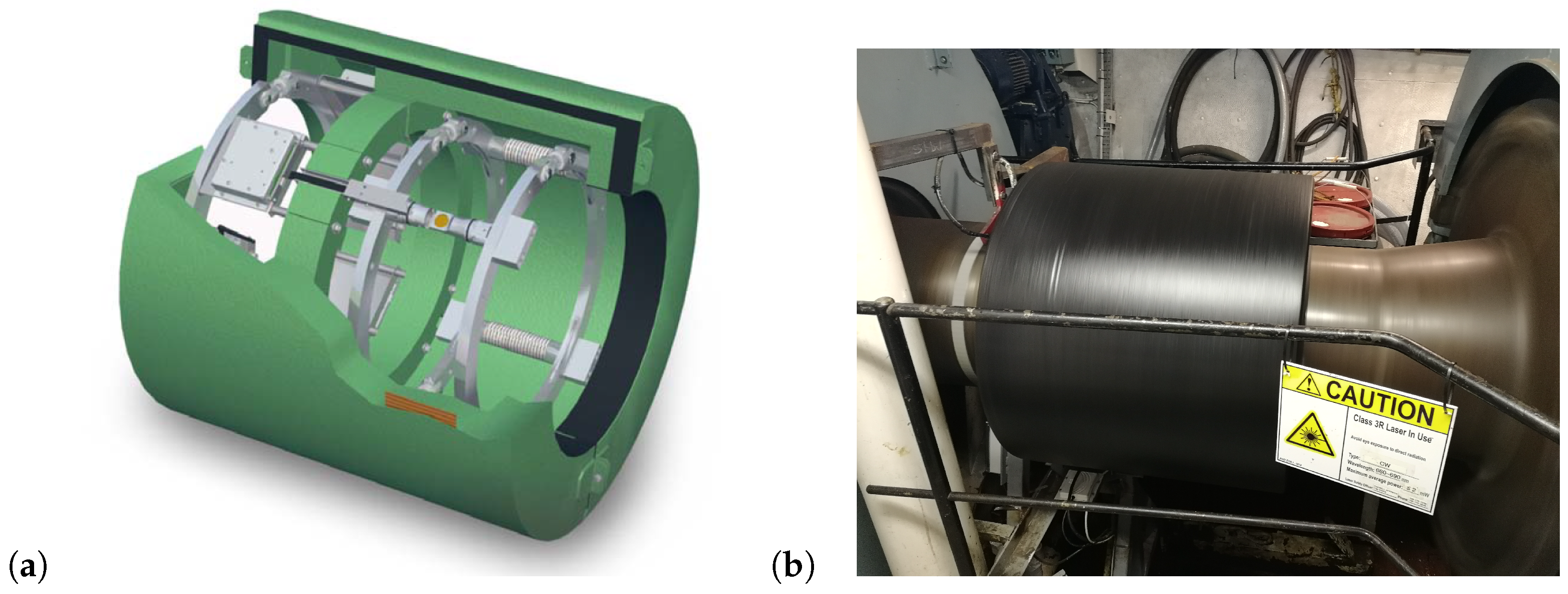
2.2. Shaft Thrust, Torque, Speed Measurements at Low Frequency
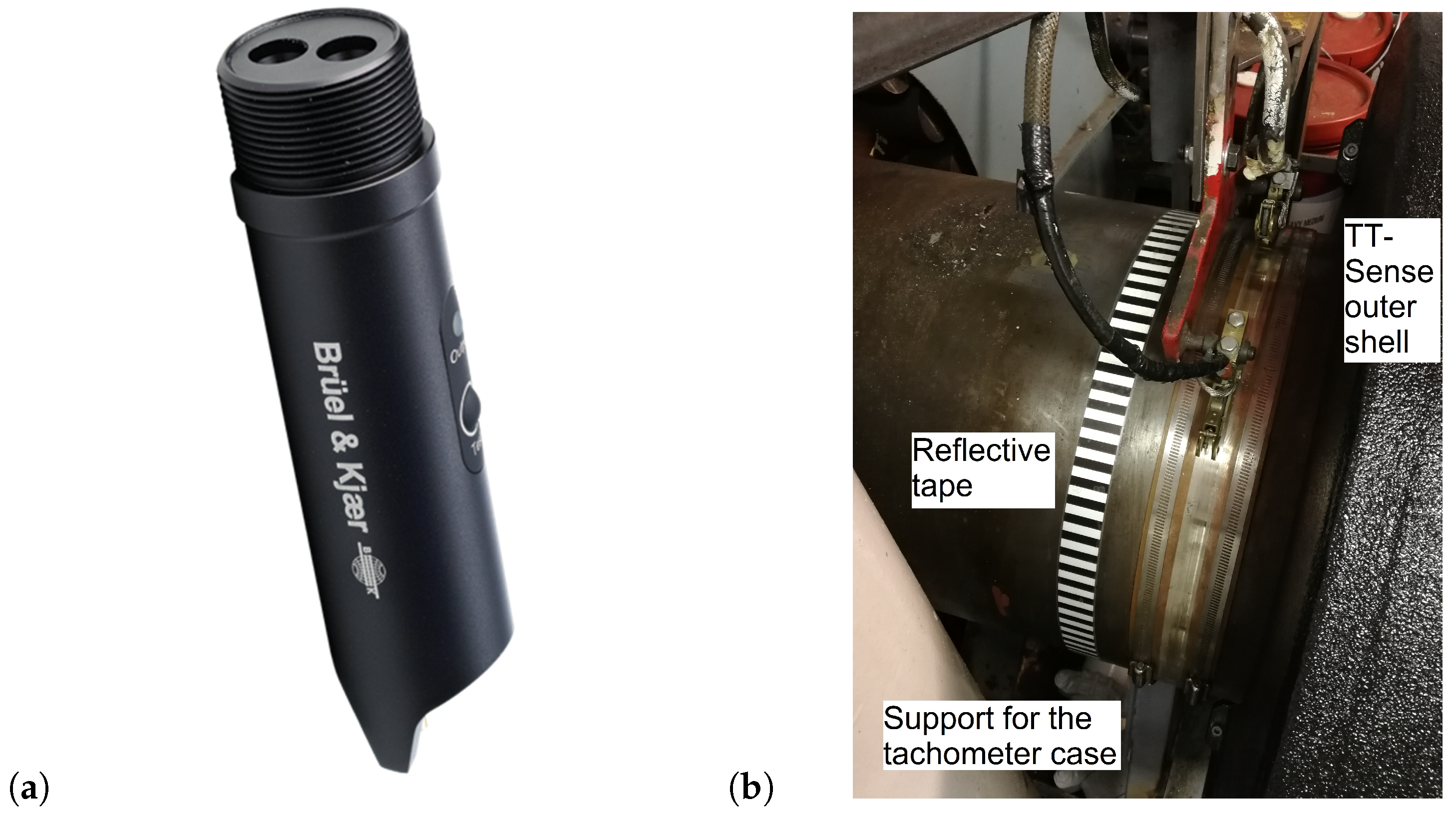
2.3. Shaft Speed Measurement at High Frequency
2.4. Ice Condition Monitoring
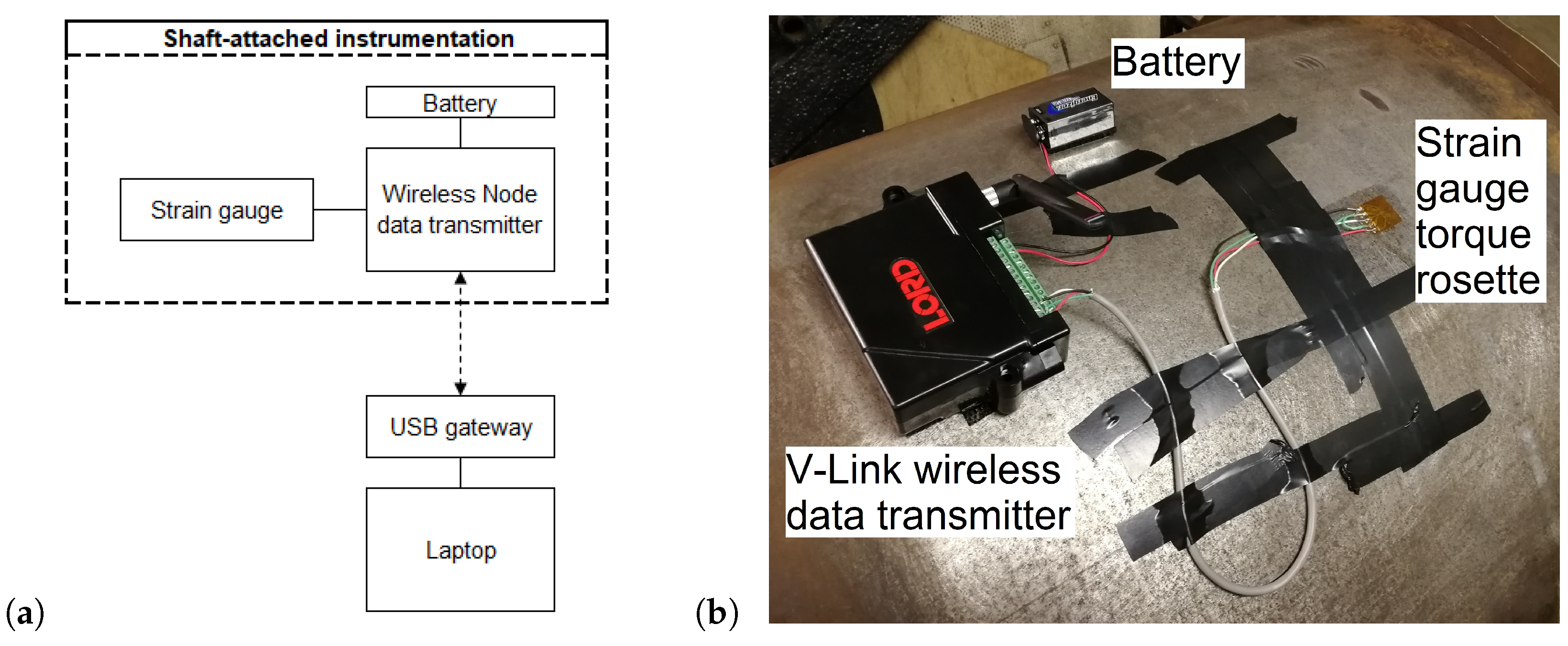
2.5. TT-Sense Torque Data Validation via Strain Gauge Measurements
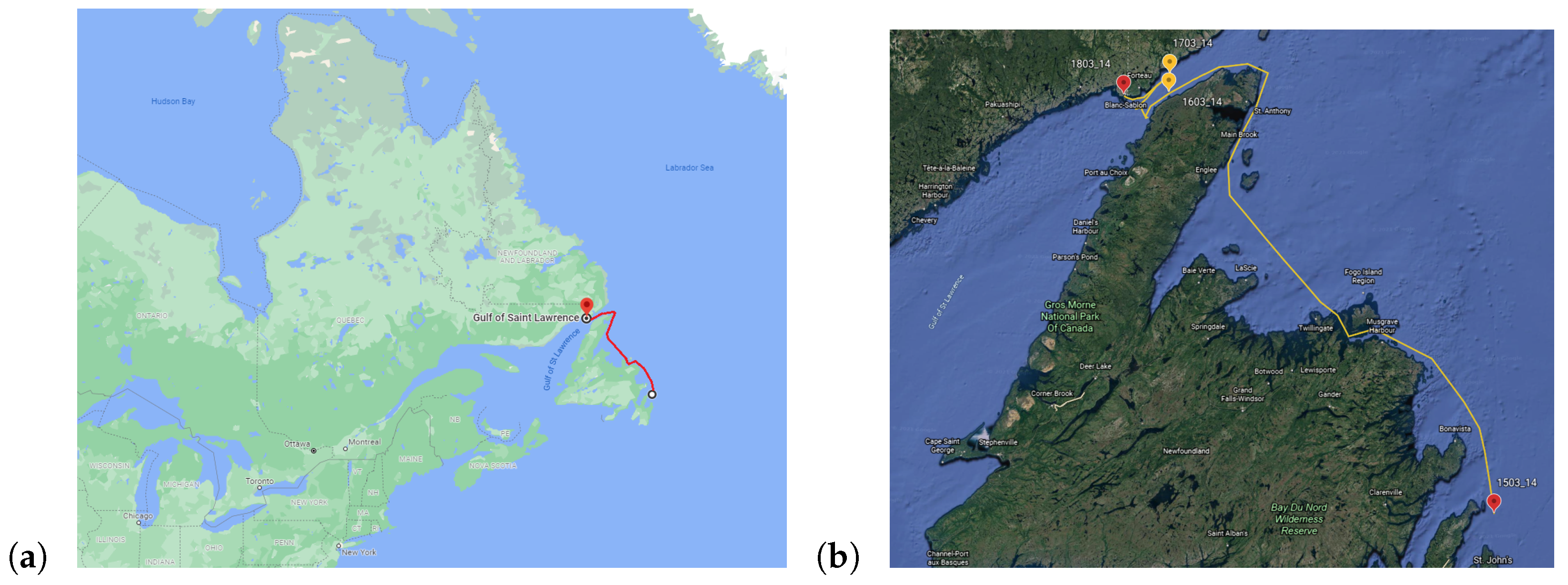
2.6. Trials in Ice-Covered Waters
3. Results
3.1. Validation of the TT-Sense Torque Measures
3.2. Analysis of the Laser Tachometer Signal
3.3. Ice-Induced Perturbations on the Shaft Dynamic Response
4. Discussion
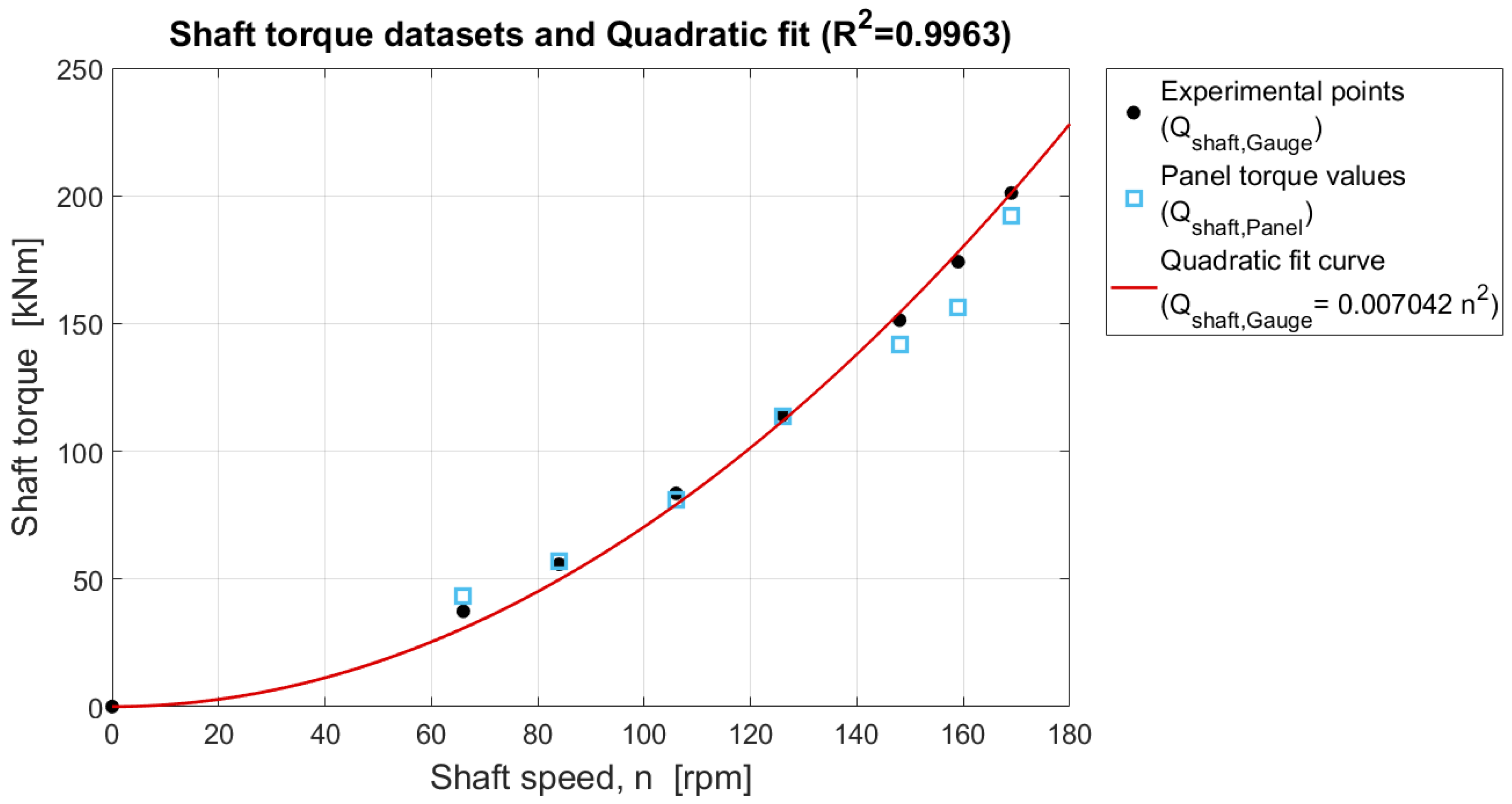
- TT-Sense validation through strain gauges. As Figure 11 and Table 3 show, the data correspond to the values, thus confirming the reliability of the strain gauge apparatus. The results in Table 3 indicate that the relative discrepancy () between the values measured by the TT-Sense and by the strain gauge decreases as the shaft’s speed increases. Since the TT-Sense and the strain gauge were installed on two different segments of the shaftline, the coupling of the axial, bending vibration modes at lower frequencies induces significant effects on the torsional responses in the two positions, as shown in Figure 10. In particular, the and values differ significantly for 100 rpm reflecting the higher uncertainty of the shaft’s torsional dynamics at lower speeds.
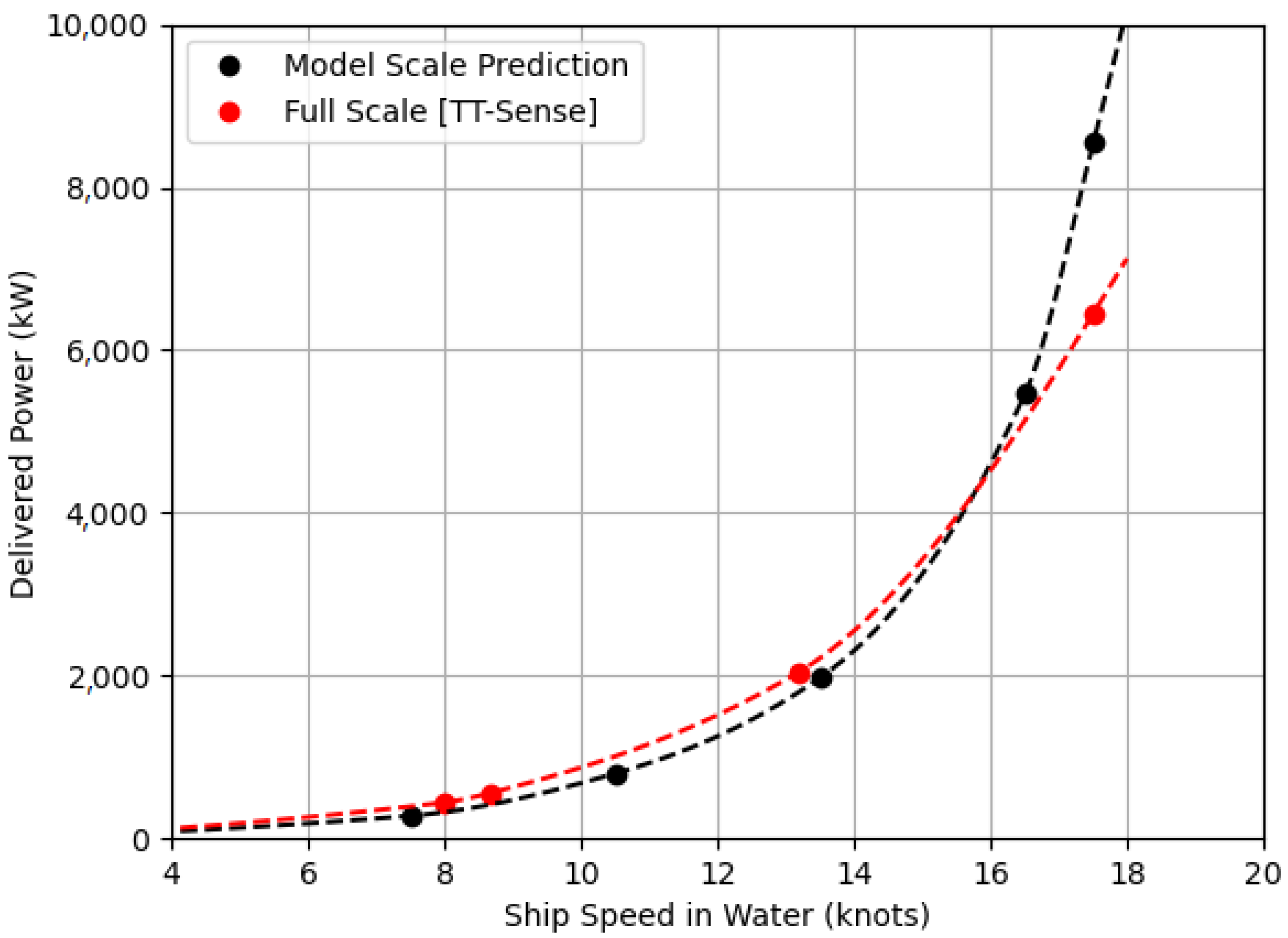
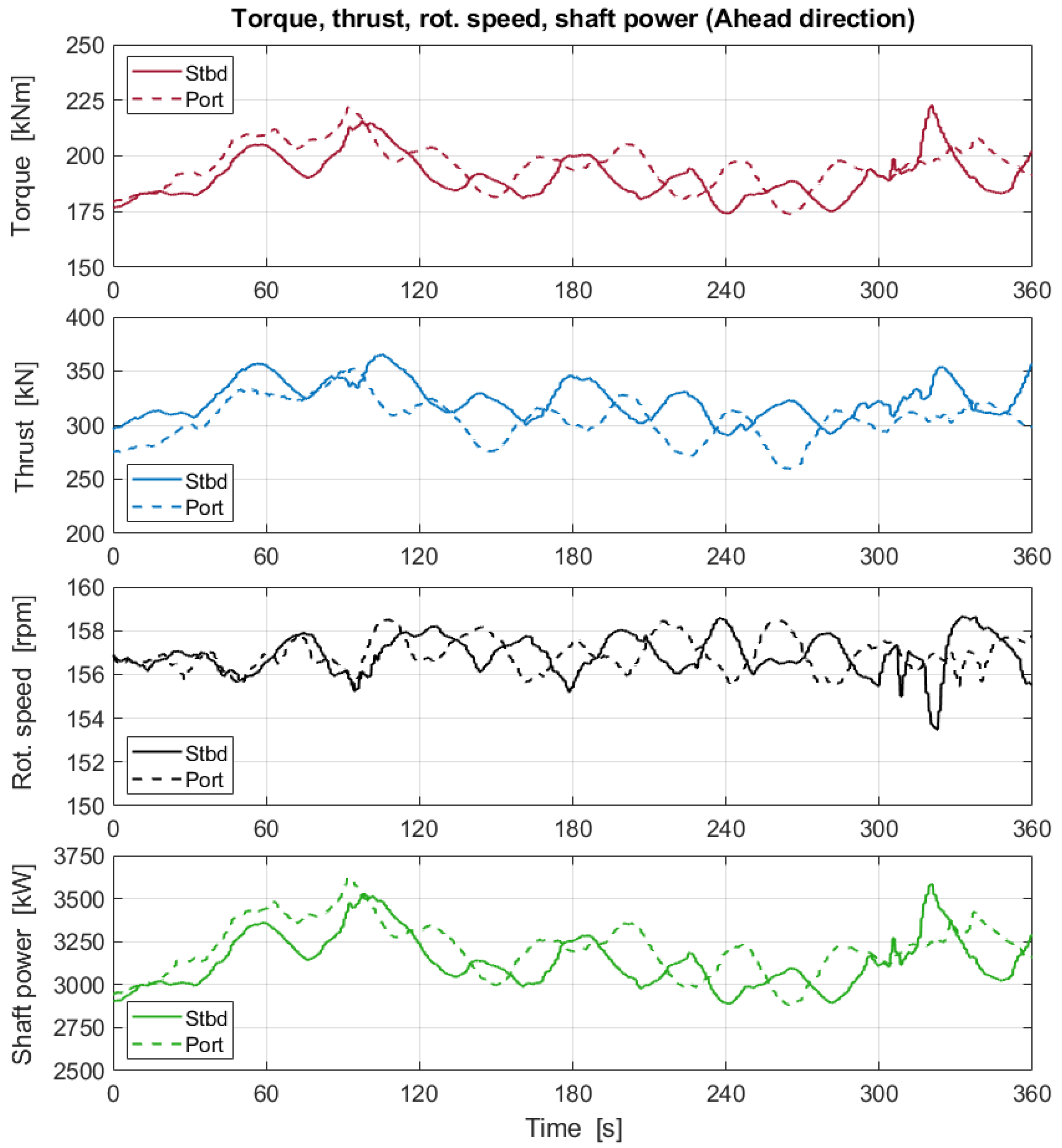
- TT-Sense validation through open water performance data.Figure 13 clearly shows that the TT-Sense device deployed on both shafts provides a sufficiently sensitive estimate of torque and power, which closely match detailed performance estimates via model-scale tests, in uncorrected open-water transits. Additionally, we showed that the dataset produced by the shaft’s optical sensors can be used to validate ship performance predictions during sea ice operations.
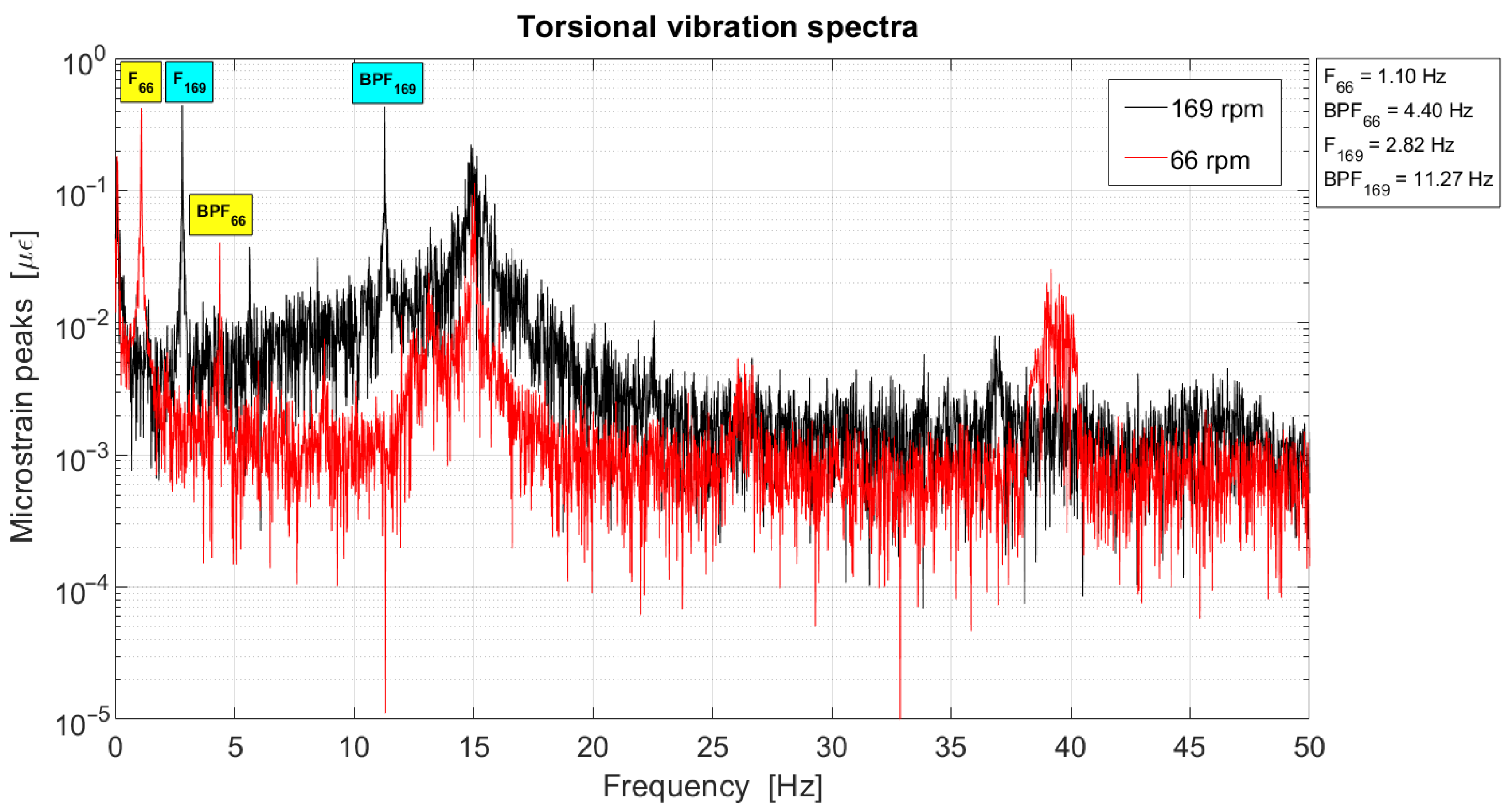
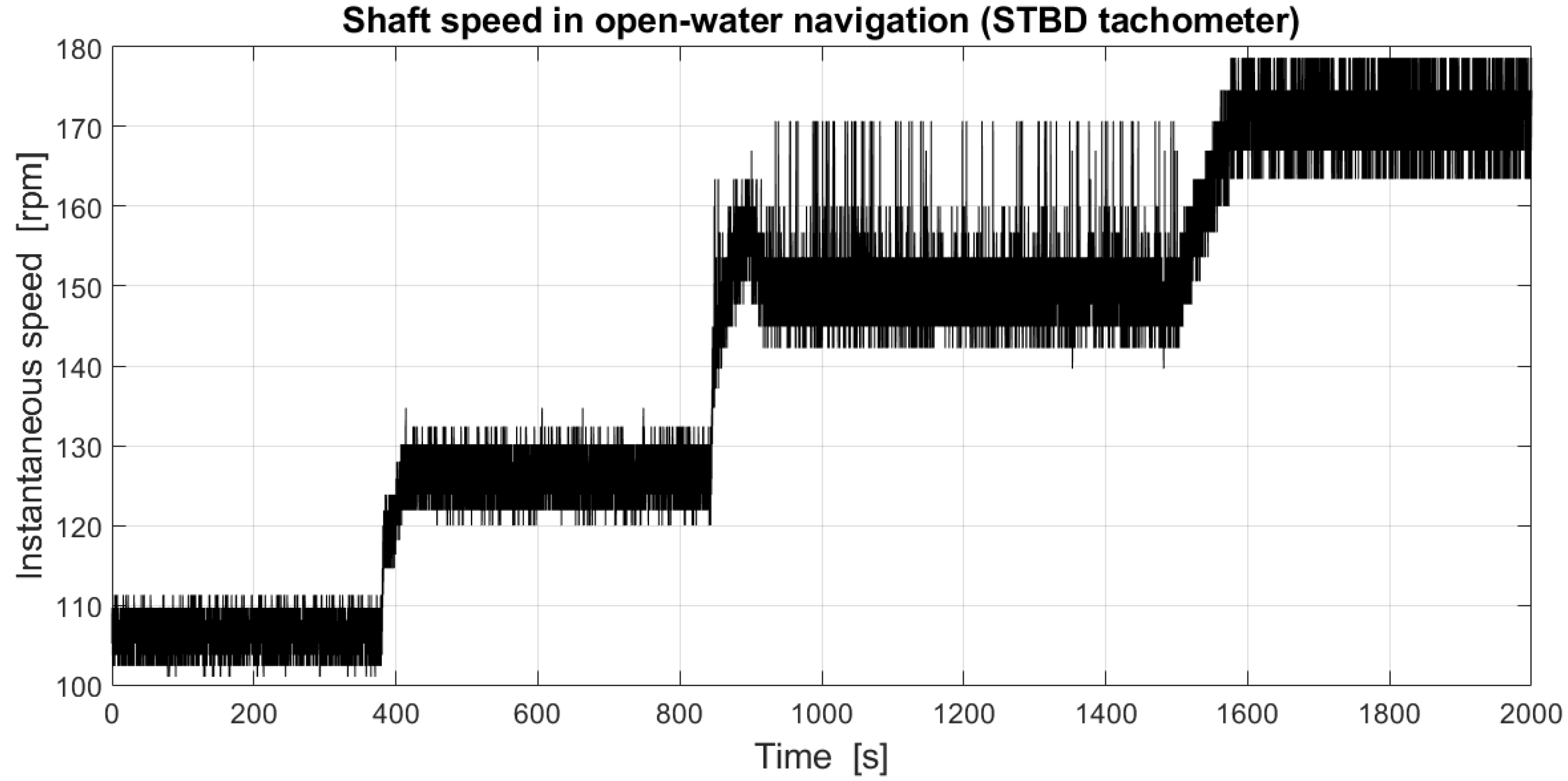
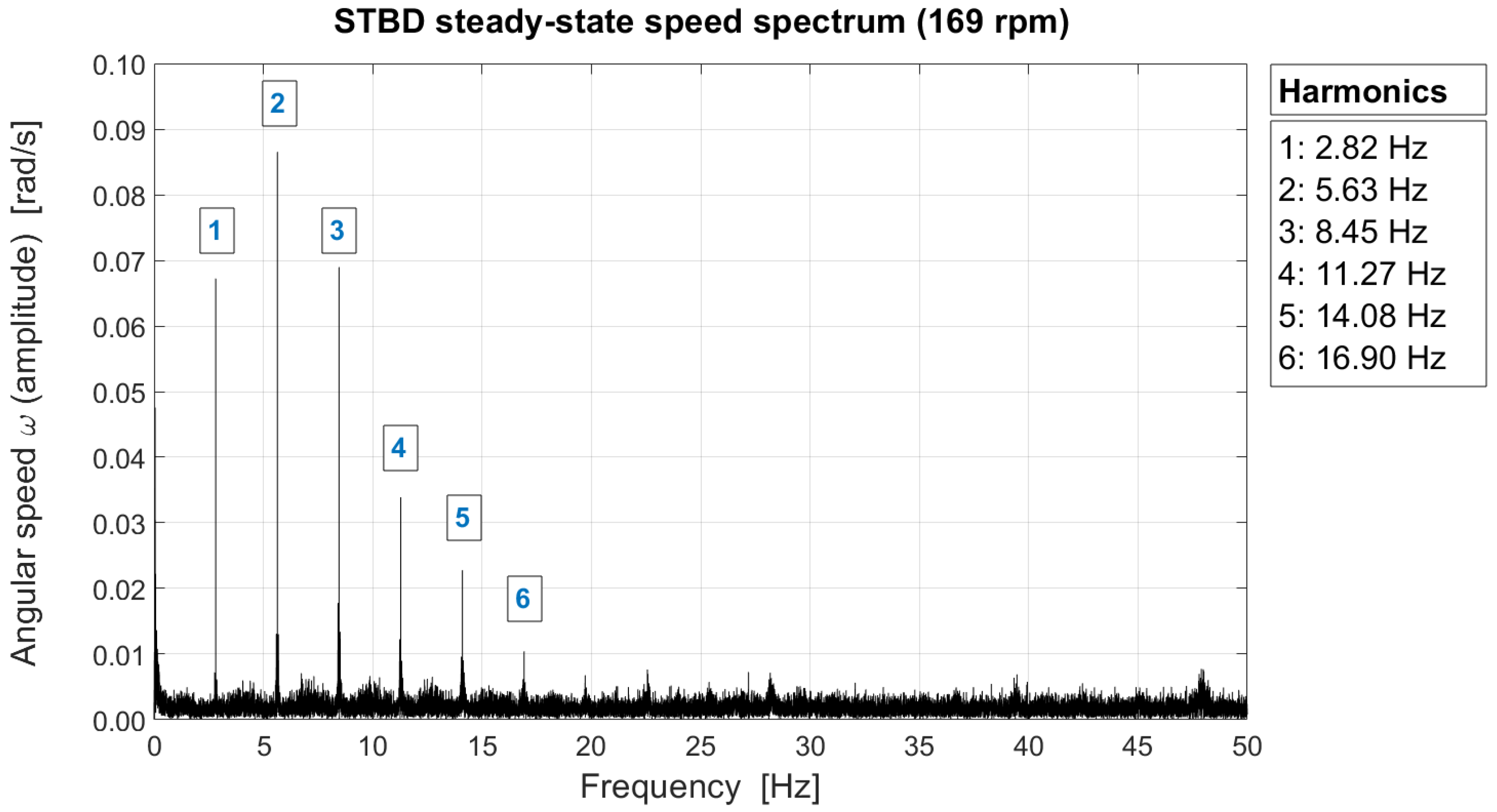
- Tachometer measurements. The dynamic rotational speed measured by the laser sensors allows us to study the torsional vibration response until 50 Hz, which is adequate to represent the major vibration modes of the shaft line and the external excitation spectra. Therefore, resonance events can be detected through these measurements. However, calculating the spectrum (from ) for a single shaft section is insufficient to determine the corresponding shaft torque, which can be obtained through two separate measurements at different sections.
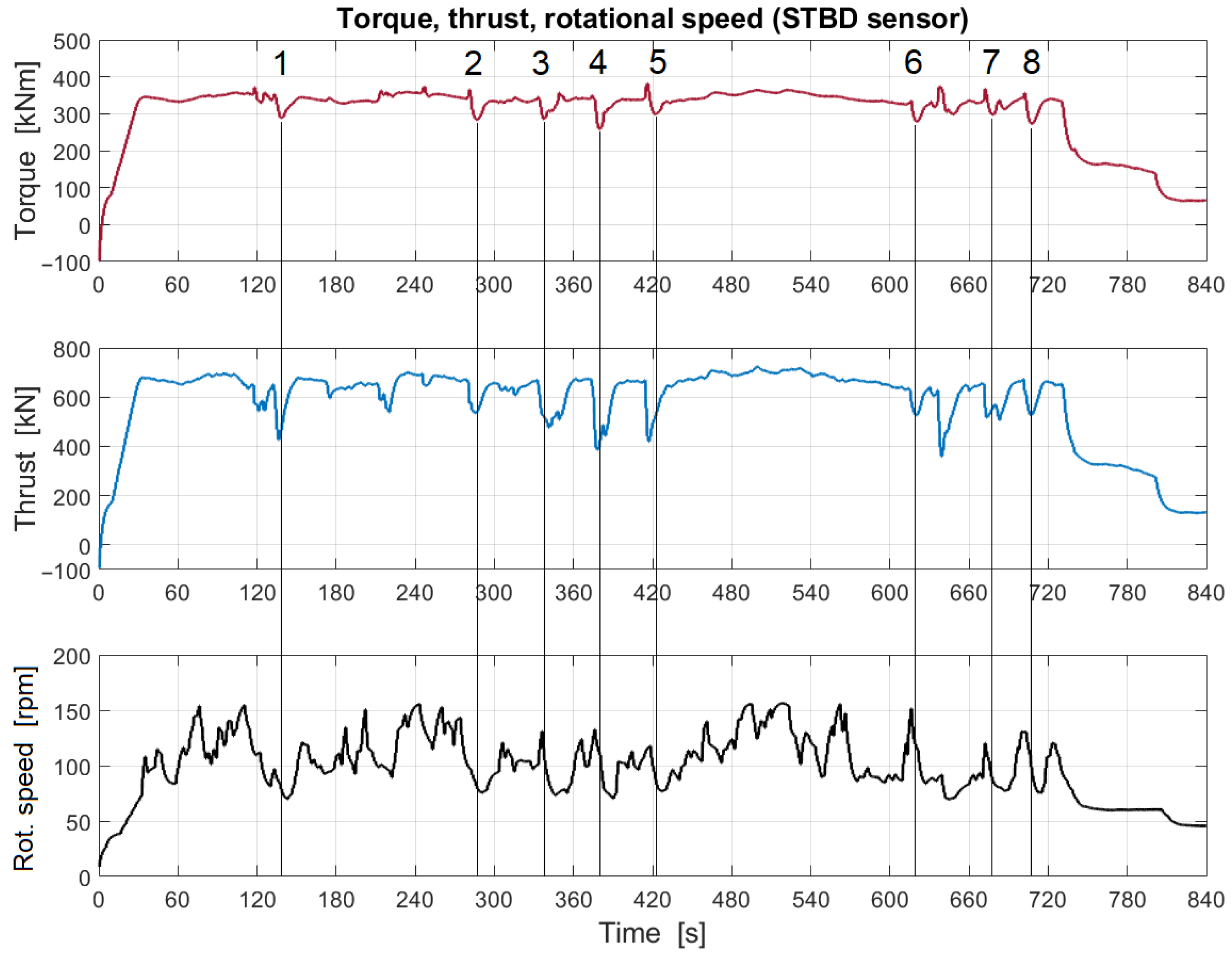
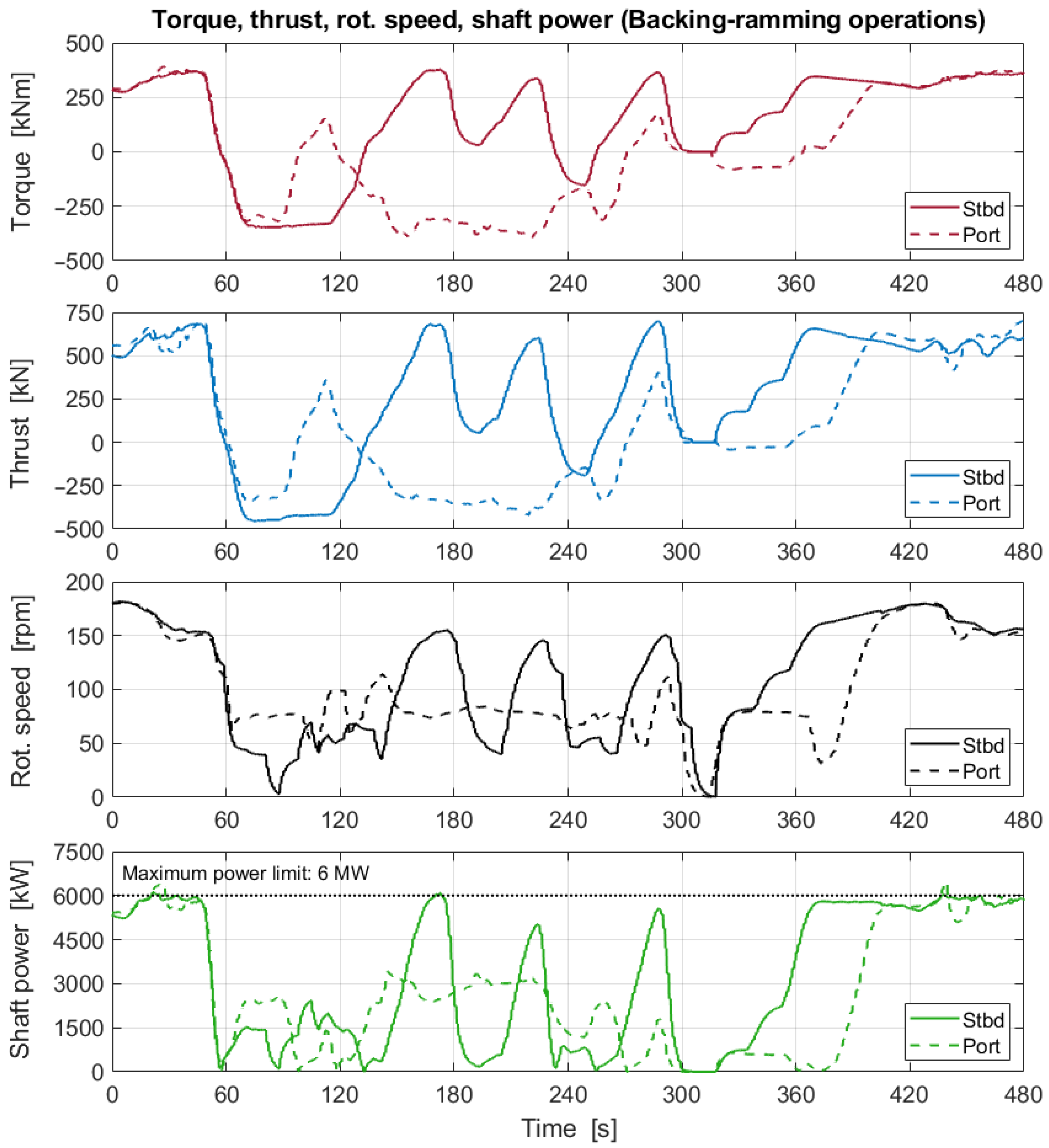
- TT-Sense data in sea ice navigation. The TT-Sense sensors deliver low-frequency shaft thrust and torque perturbations, along with the speed variation. As we can see in Figure 16, Figure 19 and Figure 21, the ice-induced torque amplitude can be evaluated in relation to the corresponding ice conditions. The sampling frequency of 5 Hz represents a limitation of the sensor, as it does not allow us to perform vibration analysis of the shaft’s response. On the other hand, the time tracking of T and Q over long time lapses provides comprehensive monitoring of the propulsion performance and efficiency. The dynamic shafts’ responses—as it can be noticed in Figure 16, Figure 19 and Figure 21—give clear indications on the operation type that the vessel undergoes.
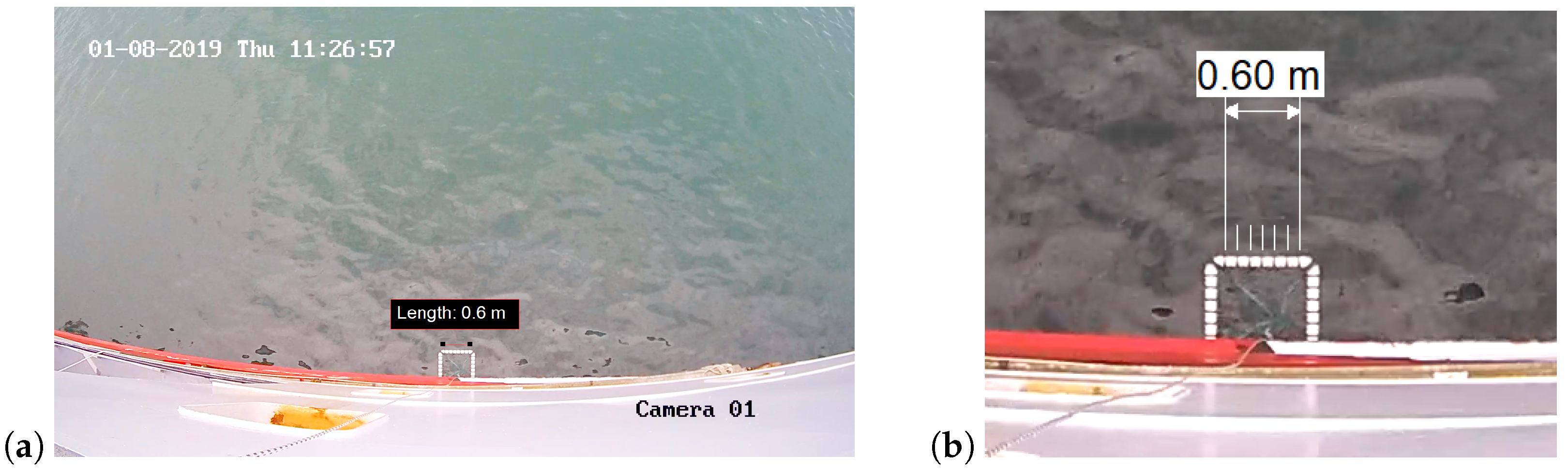
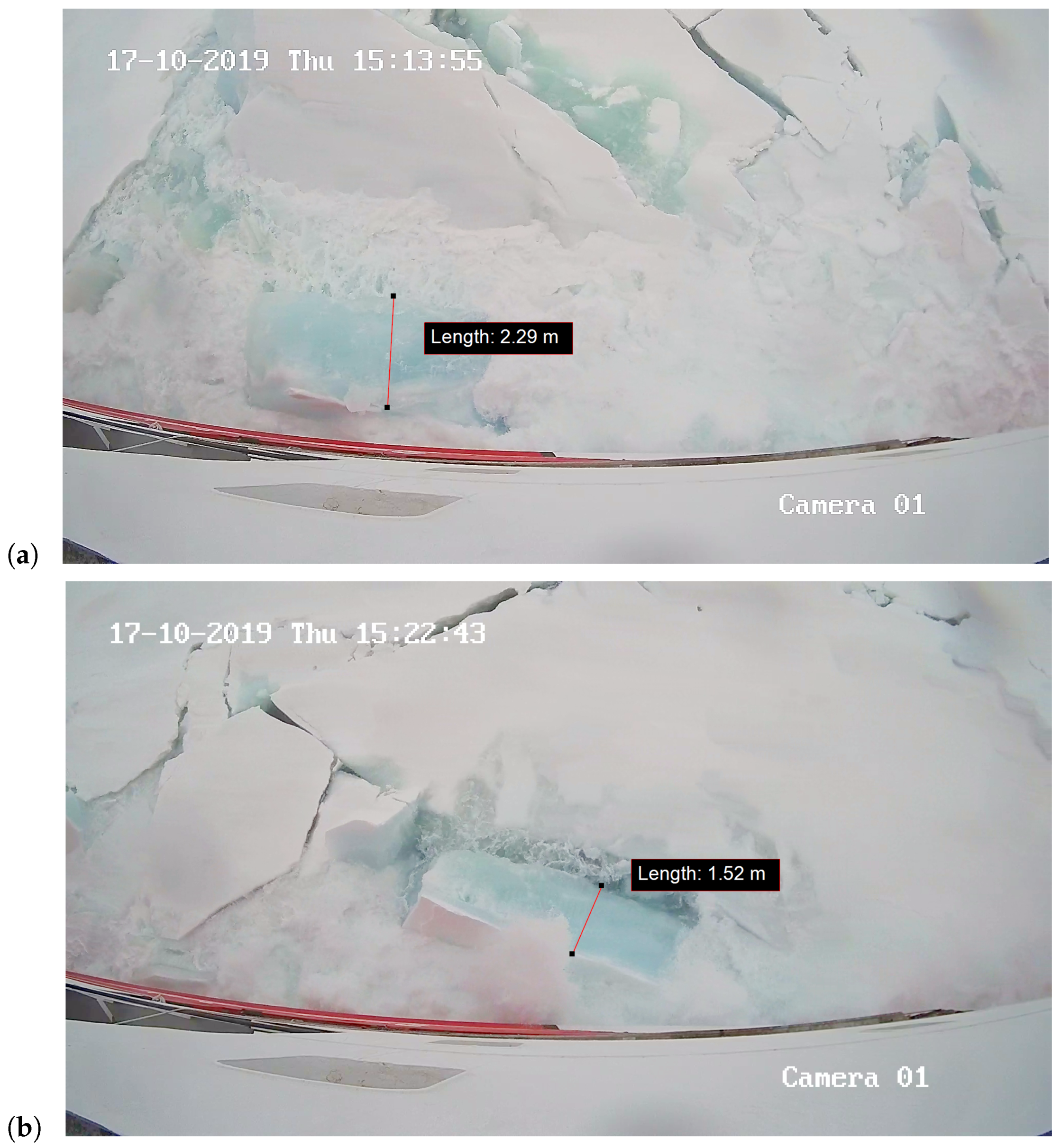
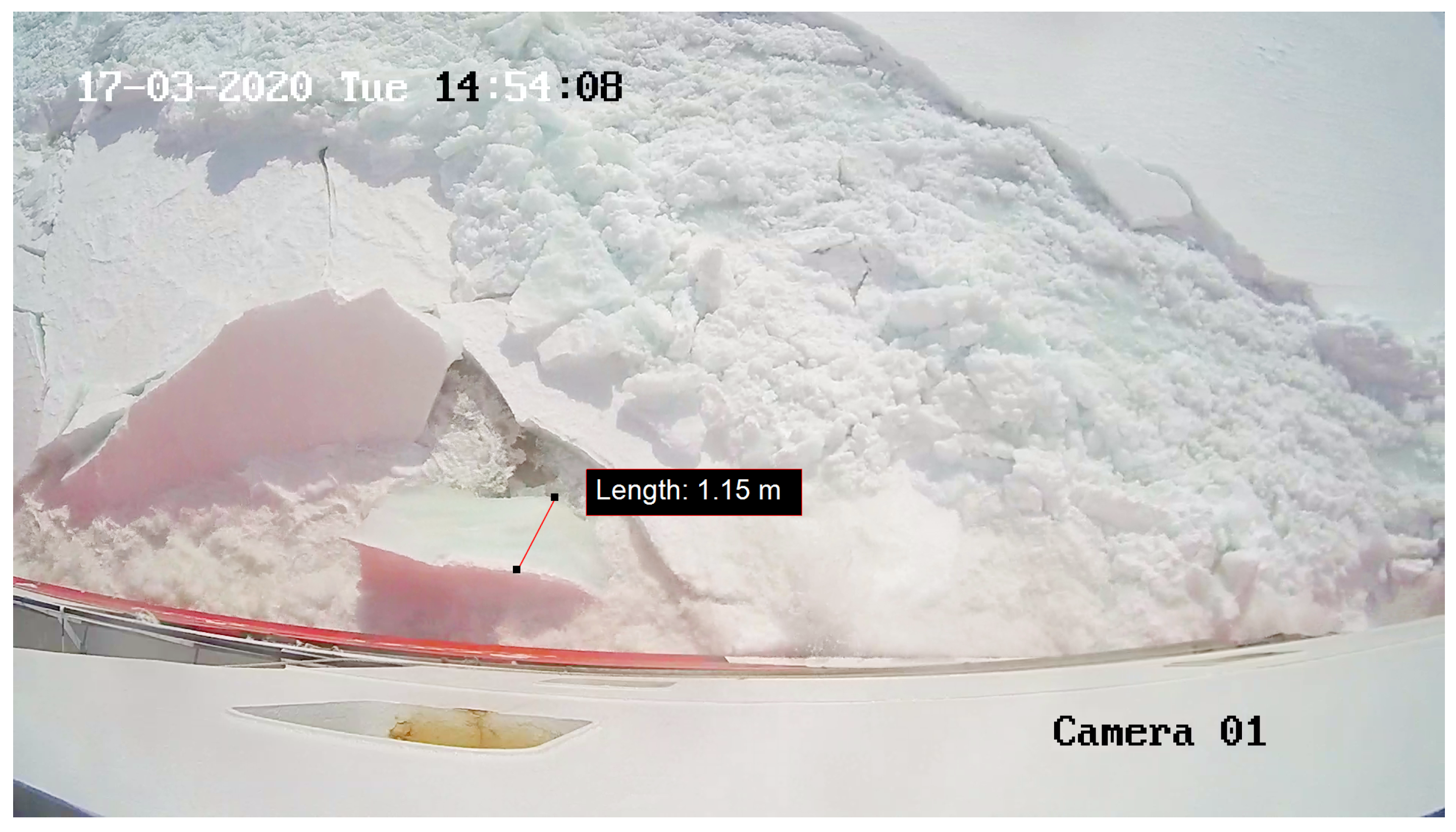
- Sea ice surface video recordings. The ultimate goal of the camera imaging data is to characterize the sea ice conditions in terms of ice pieces’ thickness, as this is the key parameter that determines the ice-propeller torque magnitude in the current Polar Rules [52]. In the time window data considered in Figure 16, the average thickness of the ice floes exceeds 1.5 m, which characterizes that specific ice type as thick first-year ice (Figure 17). Regarding the ice conditions in the March 2020 session (Figure 20 and Figure 22), milder sea ice was encountered. The thickness values of the ice layers determined from the video recordings have been calculated by means of a graphic manipulation software frame by frame (Section 2.4); this procedure may be significantly time-consuming when hundreds of pictures are concerned; therefore, an IA software could be employed to automatically recognize the ice blocks and contour their physical boundaries in the frames.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CCG | Canadian Coast Guard |
| CCGS | Canadian Coast Guard Ship |
| IMU | Inertial Measurement Unit |
| MUN | Memorial University of Newfoundland |
| NMEA | National Marine Electronics Association |
| NRC | National Research Council of Canada |
References
- Zhang, Z.; Huisingh, D.; Song, M. Exploitation of trans-Arctic maritime transportation. J. Clean. Prod. 2019, 212, 960–973. [Google Scholar] [CrossRef]
- Silber, G.K.; Adams, J.D. Vessel Operations in the Arctic, 2015–2017. Front. Mar. Sci. 2019, 6, 573–590. [Google Scholar] [CrossRef]
- Gascard, J.C.; Riemann-Campe, K.; Gerdes, R.; Schyberg, H.; Randriamampianina, R.; Karcher, M.; Zhang, J.; Rafizadeh, M. Future sea ice conditions and weather forecasts in the Arctic: Implications for Arctic shipping. Ambio 2017, 46, 355–367. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perovich, D.K.; Richter-Menge, J.A. Regional variability in sea ice melt in a changing Arctic. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140165. [Google Scholar] [CrossRef] [PubMed]
- Blaauw, R.J. Oil and gas development and opportunities in the Arctic Ocean. In Environmental Security in the Arctic Ocean; Springer: Berlin/Heidelberg, Germany, 2013; pp. 175–184. [Google Scholar]
- Bogoyavlensky, V. The Arctic and World Ocean: Current State, Prospects and Challenges of Hydrocarbon Resources Development. In Proceedings of the 21st World Petroleum Congress, Moscow, Russia, 15–19 June 2014. [Google Scholar]
- Gunnarsson, B. Recent ship traffic and developing shipping trends on the Northern Sea Route—Policy implications for future arctic shipping. Mar. Policy 2021, 124, 104369. [Google Scholar] [CrossRef]
- Pierre, C.; Olivier, F. Relevance of the Northern Sea Route (NSR) for bulk shipping. Transp. Res. Part A Policy Pract. 2015, 78, 337–346. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, Q.; Zhang, L. Is the Northern Sea Route attractive to shipping companies? Some insights from recent ship traffic data. Mar. Policy 2016, 73, 53–60. [Google Scholar] [CrossRef]
- Melia, N.; Haines, K.; Hawkins, E.; Day, J.J. Towards seasonal Arctic shipping route predictions. Environ. Res. Lett. 2017, 12, 084005. [Google Scholar] [CrossRef]
- Schröder, C.; Reimer, N.; Jochmann, P. Environmental impact of exhaust emissions by Arctic shipping. Ambio 2017, 46, 400–409. [Google Scholar] [CrossRef] [Green Version]
- Granier, C.; Niemeier, U.; Jungclaus, J.H.; Emmons, L.; Hess, P.; Lamarque, J.F.; Walters, S.; Brasseur, G.P. Ozone pollution from future ship traffic in the Arctic northern passages. Geophys. Res. Lett. 2006, 33, L13807. [Google Scholar] [CrossRef] [Green Version]
- Browse, J.; Carslaw, K.S.; Schmidt, A.; Corbett, J.J. Impact of future Arctic shipping on high-latitude black carbon deposition. Geophys. Res. Lett. 2013, 40, 4459–4463. [Google Scholar] [CrossRef] [Green Version]
- Mjelde, A.; Martinsen, K.; Eide, M.; Endresen, Ø. Environmental accounting for Arctic shipping—A framework building on ship tracking data from satellites. Mar. Pollut. Bull. 2014, 87, 22–28. [Google Scholar] [CrossRef] [PubMed]
- Gong, W.; Beagley, S.R.; Cousineau, S.; Sassi, M.; Munoz-Alpizar, R.; Ménard, S.; Racine, J.; Zhang, J.; Chen, J.; Morrison, H.; et al. Assessing the impact of shipping emissions on air pollution in the Canadian Arctic and northern regions: Current and future modelled scenarios. Atmos. Chem. Phys. 2018, 18, 16653–16687. [Google Scholar] [CrossRef] [Green Version]
- Yumashev, D.; van Hussen, K.; Gille, J.; Whiteman, G. Towards a balanced view of Arctic shipping: Estimating economic impacts of emissions from increased traffic on the Northern Sea Route. Clim. Chang. 2017, 143, 143–155. [Google Scholar] [CrossRef] [Green Version]
- Kitagawa, H. Safety and Regulations of Arctic Shipping. In Proceedings of the Twenty-First International Offshore and Polar Engineering Conference, International Society of Offshore and Polar Engineers, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Pietri, D.; Soule, A.B., IV; Kershner, J.; Soles, P.; Sullivan, M. The Arctic shipping and environmental management agreement: A regime for marine pollution. Coast. Manag. 2008, 36, 508–523. [Google Scholar] [CrossRef]
- Hindley, R.J.; Tustin, R.D.; Upcraft, D.S. Environmental protection regulations and requirements for ships for Arctic sea areas. In Proceedings of the RINA International Conference—Design and Construction of Vessels Operating in Low Temperature Environments, Glasgow, UK, 29–30 November 2017; pp. 107–118. [Google Scholar]
- Lee, S.K. Rational approach to integrate the design of propulsion power and propeller strength for ice ships. In Proceedings of the 2006 SNAME ICETECH Conference, Banff, AB, Canada, 16–19 July 2006. [Google Scholar]
- Polić, D.; Ehlers, S.; Æsøy, V.; Pedersen, E. Propulsion Machinery Operating In Ice-A Modelling And Simulation Approach. In Proceedings of the 27th European Conference on Modelling and Simulation (ECMS 2013), Ålesund, Norway, 27–30 May 2013; pp. 191–197. [Google Scholar]
- Yang, B.; Sun, Z.; Zhang, G.; Wang, Q.; Zong, Z.; Li, Z. Numerical estimation of ship resistance in broken ice and investigation on the effect of floe geometry. Mar. Struct. 2021, 75, 102867. [Google Scholar] [CrossRef]
- Bose, N.; Veitch, B.; Doucet, J.M. A design approach for ice class propellers. SNAME Trans. 1998, 106, 185–211. [Google Scholar]
- Vizentin, G.; Vukelic, G.; Murawski, L.; Recho, N.; Orovic, J. Marine propulsion system failures—A review. J. Mar. Sci. Eng. 2020, 8, 662. [Google Scholar] [CrossRef]
- Norhamo, L.; Bakken, G.M.; Deinboll, O.; Iseskär, J.J. Challenges related to propulsor—Ice interaction in arctic waters. In Proceedings of the First International Symposium on Marine Propulsors (SMP09), Trondheim, Norway, 22–24 June 2009. [Google Scholar]
- Brouwer, J.; Hagesteijn, G.; Bosman, R. Propeller-ice impacts measurements with a six-component blade load sensor. In Proceedings of the Third International Symposium on Marine Propulsors (SMP13), Launceston, Australia, 5–8 May 2013. [Google Scholar]
- Khan, A.G.; Hisette, Q.; Streckwall, H.; Liu, P. Numerical investigation of propeller-ice interaction effects. Ocean Eng. 2020, 216, 107716. [Google Scholar] [CrossRef]
- Xu, P.; Wang, C.; Ye, L.; Guo, C.; Xiong, W.; Wu, S. Cavitation and Induced Excitation Force of Ice-Class Propeller Blocked by Ice. J. Mar. Sci. Eng. 2021, 9, 674. [Google Scholar] [CrossRef]
- Wang, J.; Akinturk, A.; Bose, N. Numerical prediction of model podded propeller-ice interaction loads. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering (OMAE2006), Hamburg, Germany, 4–9 June 2006; pp. 667–674. [Google Scholar]
- Williams, F.M.; Spender, D.; Mathews, S.T.; Bayly, I. Full Scale Trials in Level Ice with Canadian R-Class Icebreaker. SNAME Trans. 1992, 100, 293–313. [Google Scholar]
- Suominen, M.; Karhunen, J.; Bekker, A.; Kujala, P.; Elo, M.; Enlund, H.; Saarinen, S. Full-scale measurements on board PSRV SA Agulhas II in the Baltic Sea. In Proceedings of the International Conference on Port and Ocean Engineering Under Arctic Conditions, Espoo, Finland, 9–13 June 2013. [Google Scholar]
- Suominen, M.; Li, F.; Lu, L.; Kujala, P.; Bekker, A.; Lehtiranta, J. Effect of maneuvering on ice-induced loading on ship hull: Dedicated full-scale tests in the Baltic Sea. J. Mar. Sci. Eng. 2020, 8, 759. [Google Scholar] [CrossRef]
- Dahler, G.; Stubbs, J.T.; Norhamo, L. Propulsion in ice—Big ships. In Proceedings of the International Conference and Exhibition on Performance of Ship and Structure in Ice—ICETECH, Anchorage, AK, USA, 20–23 September 2010. [Google Scholar]
- Jussila, M.; Koskinen, P. Ice loads on CP-propeller and propeller shaft of small ferry and their statistical distributions during winter ’87. In Proceedings of the 8th International Conference on Offshore Mechanics and Arctic Engineering, The Hague, The Netherlands, 19–23 March 1989; Volume IV. [Google Scholar]
- Lensu, M.; Kujala, P.; Kulovesi, J.; Lehtiranta, J.; Suominen, M. Measurements of Antarctic sea ice thickness during the ice transit of SA Agulhas II. In Proceedings of the International Conference on Port and Ocean Engineering Under Arctic Conditions (POAC 2015), Trondheim, Norway, 14–18 June 2015. [Google Scholar]
- Weissling, B.; Ackley, S.; Wagner, P.; Xie, H. EISCAM—Digital image acquisition and processing for sea ice parameters from ships. Cold Reg. Sci. Technol. 2009, 57, 49–60. [Google Scholar] [CrossRef]
- Niioka, T.; Kohei, C. Sea ice thickness measurement from an ice breaker using a stereo imaging system consisted of a pairs of high definition video cameras. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. Kyoto Jpn. 2010, 38, 1053–1056. [Google Scholar]
- Lu, W.; Zhang, Q.; Lubbad, R.; Løset, S.; Skjetne, R. A shipborne measurement system to acquire sea ice thickness and concentration at engineering scale. In Proceedings of the Arctic Technology Conference, St. John’s, NL, Canada, 24–26 October 2016. [Google Scholar]
- De Waal, R.J.O.; Bekker, A.; Heyns, P.S. Indirect load case estimation for propeller-ice moments from shaft line torque measurements. Cold Reg. Sci. Technol. 2018, 151, 237–248. [Google Scholar] [CrossRef] [Green Version]
- Suominen, M.; Bekker, A.; Kujala, P.; Soal, K.; Lensu, M. Visual Anctartic Sea Ice Condition Observations during Austral Summers 2012–2016. In Proceedings of the 24th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC 2017), Busan, Korea, 11–16 June 2017. [Google Scholar]
- de Waal, R.J.O.; Bekker, A.; Heyns, P.S. Bi-Polar Full Scale Measurements of Operational Loading on Polar Vessel Shaft-lines. In Proceedings of the 24th International Conference on Port and Ocean Engineering under Arctic Conditions (POAC 2017), Busan, Korea, 11–16 June 2017. [Google Scholar]
- Ikonen, T.; Peltokorpi, O.; Karhunen, J. Inverse ice-induced moment determination on the propeller of an ice-going vessel. Cold Reg. Sci. Technol. 2015, 112, 1–13. [Google Scholar] [CrossRef]
- Nickerson, B.M.; Bekker, A. Inverse model for the estimation of ice-induced propeller moments using modal superposition. Appl. Math. Model. 2022, 102, 640–660. [Google Scholar] [CrossRef]
- Remond, D. Practical performances of high-speed measurement of gear transmission error or torsional vibrations with optical encoders. Meas. Sci. Technol. 1998, 9, 347. [Google Scholar] [CrossRef]
- Burella, G.; Moro, L.; Oldford, D. Analysis and validation of a procedure for a lumped model of Polar Class ship shafting systems for transient torsional vibrations. J. Mar. Sci. Technol. 2018, 23, 633–646. [Google Scholar] [CrossRef]
- Burella, G.; Moro, L. Transient torsional analysis of polar class vessel shafting systems using a lumped model and finite element analysis. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]
- Zambon, A.; Moro, L. Torsional vibration analysis of diesel driven propulsion systems: The case of a polar-class vessel. Ocean Eng. 2022, 245, 110330. [Google Scholar] [CrossRef]
- Hoffmann, K. Applying the Wheatstone Bridge Circuit; Version W1569en-1.0; Technical Report; Hottinger Baldwin Messtechnik (HBM) GmbH: Darmstadt, Germany, 2001. [Google Scholar]
- MAN. Basic Principles of Ship Propulsion; MAN Diesel & Turbo: Frederikshavn, Denmark, 2011. [Google Scholar]
- Carlton, J.S. Marine Propellers and Propulsion, 2nd ed.; Butterworth-Heinemann, Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Wang, J. CCG’s Baseline Model Tests Using Henry Larsen Icebreaker [NRC-OCRE-2021-TR-004]; Technical Report; National Research Council of Canada–Ocean, Coastal and River Engineering (NRC-OCRE): St. John’s, NL, Canada, 2021. [Google Scholar]
- International Association of Classification Societies (IACS). Requirements Concerning Polar Class—Polar Rules; International Association of Classification Societies (IACS): London, UK, 2006; Rev. 1 January 2007, Corr. 1 October 2007. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Manufacturer | Description | Operation | Items | Location |
|---|---|---|---|---|---|
| TT-Sense sensor | VAF Instruments | Optical LED rotating sensor | Low-frequency measurement of the shaft’s torque, thrust, speed fluctuations | 2 | Propeller shafting segments (Port, Starboard) |
| Laser tachometer | Brüel & Kjær | CCLD laser probe | High-frequency measurement of the shaft rotational speed | 2 | Propeller shafting segments (Port, Starboard) |
| Outdoor HD Camera | HIK Vision | Weatherproof IP-POE camera | Video recordings of the sea surface close to the hull | 1 | Side railing of a higher deck, pointing vertically downwards |
| MTi-300 (IMU sensor) | XSens | Attitude Heading and Reference System (AHRS) | 20-Hz filtered 6-DOF acceleration, heading, pitch, roll motions | 1 | Communication Room (upper superstructure) |
| Quantity | Value | Unit | |
|---|---|---|---|
| Length overall | 99.8 | [m] | |
| Beam | B | 19.6 | [m] |
| Draught | d | 7.3 | [m] |
| Gross Tonnage | 6166 | [GT] | |
| Total propulsive power | 12.2 | [MW] | |
| Propeller diameter | D | 4.120 | [m] |
| Maximum propeller’s rotational speed | 180 | [rpm] | |
| Maximum transit speed | 16 | [kn] | |
| Arctic Class certification | 4 | [–] |
| Speed, n | |||||
|---|---|---|---|---|---|
| [rpm] | [kNm] | [kNm] | [kNm] | [kNm] | [%] |
| 66 | 37.3 | 23.8 | 27.5 | 43.4 | 36.2 |
| 84 | 55.7 | 41.0 | 37.8 | 56.8 | 26.4 |
| 106 | 83.5 | 66.4 | 63.2 | 81.1 | 20.5 |
| 126 | 114.2 | 100.8 | 96.2 | 113.7 | 11.7 |
| 148 | 151.4 | 132.2 | 127.0 | 142.0 | 12.7 |
| 159 | 174.2 | 152.8 | 164.6 | 156.2 | 12.3 |
| 169 | 201.1 | 179.3 | 182.8 | 192.1 | 10.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zambon, A.; Moro, L.; Brown, J.; Kennedy, A.; Oldford, D. A Measurement System to Monitor Propulsion Performance and Ice-Induced Shaftline Dynamic Response of Icebreakers. J. Mar. Sci. Eng. 2022, 10, 522. https://doi.org/10.3390/jmse10040522
Zambon A, Moro L, Brown J, Kennedy A, Oldford D. A Measurement System to Monitor Propulsion Performance and Ice-Induced Shaftline Dynamic Response of Icebreakers. Journal of Marine Science and Engineering. 2022; 10(4):522. https://doi.org/10.3390/jmse10040522
Chicago/Turabian StyleZambon, Alessandro, Lorenzo Moro, Jeffrey Brown, Allison Kennedy, and Dan Oldford. 2022. "A Measurement System to Monitor Propulsion Performance and Ice-Induced Shaftline Dynamic Response of Icebreakers" Journal of Marine Science and Engineering 10, no. 4: 522. https://doi.org/10.3390/jmse10040522