
ECO4RUPA: 5G-IoT Inclusive and Intelligent Routing Ecosystem with Low-Cost Air Quality Monitoring
 , , , and
, , , and
Abstract
:1. Introduction
2. State of the Art
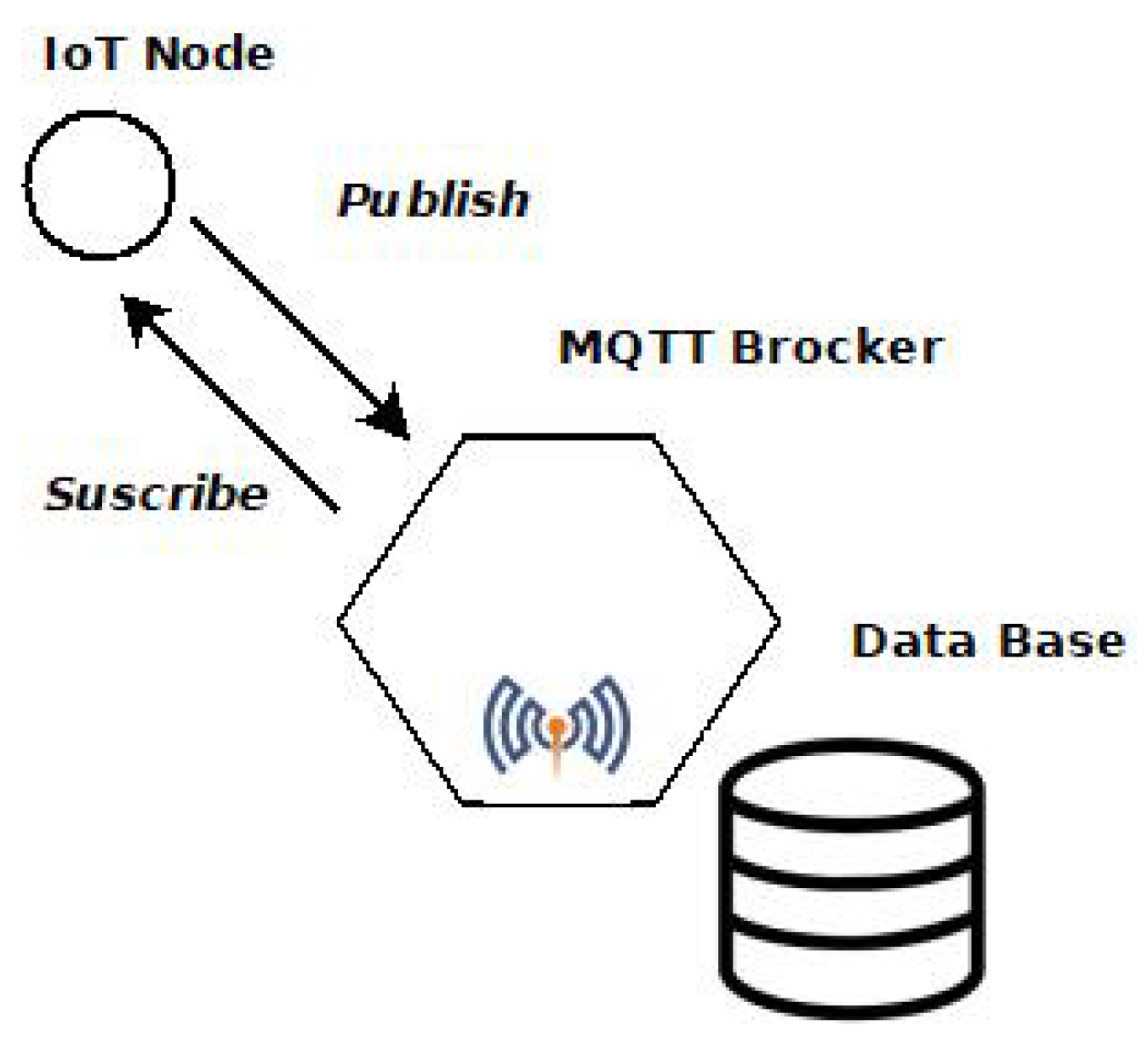
3. Design Alternatives and Techniques for a Broad AQ Monitoring Network and Its Architecture
4. Data Fusion, Spatial Interpolation, and Route Planner Application
4.1. Analysis of the User’s Profile: Weighting Pollutants
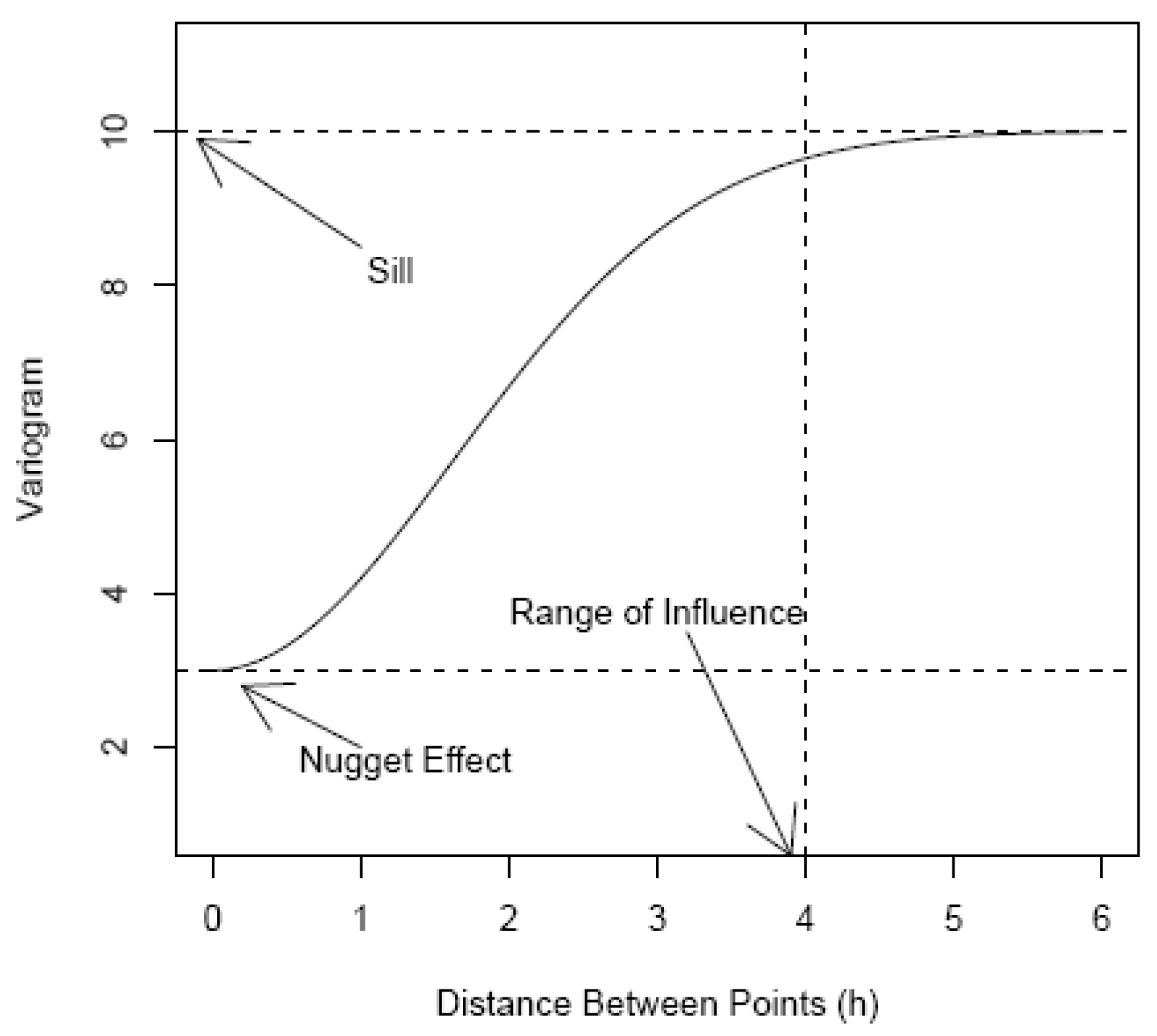
4.2. Kriging for Spatial Interpolation of Pollution
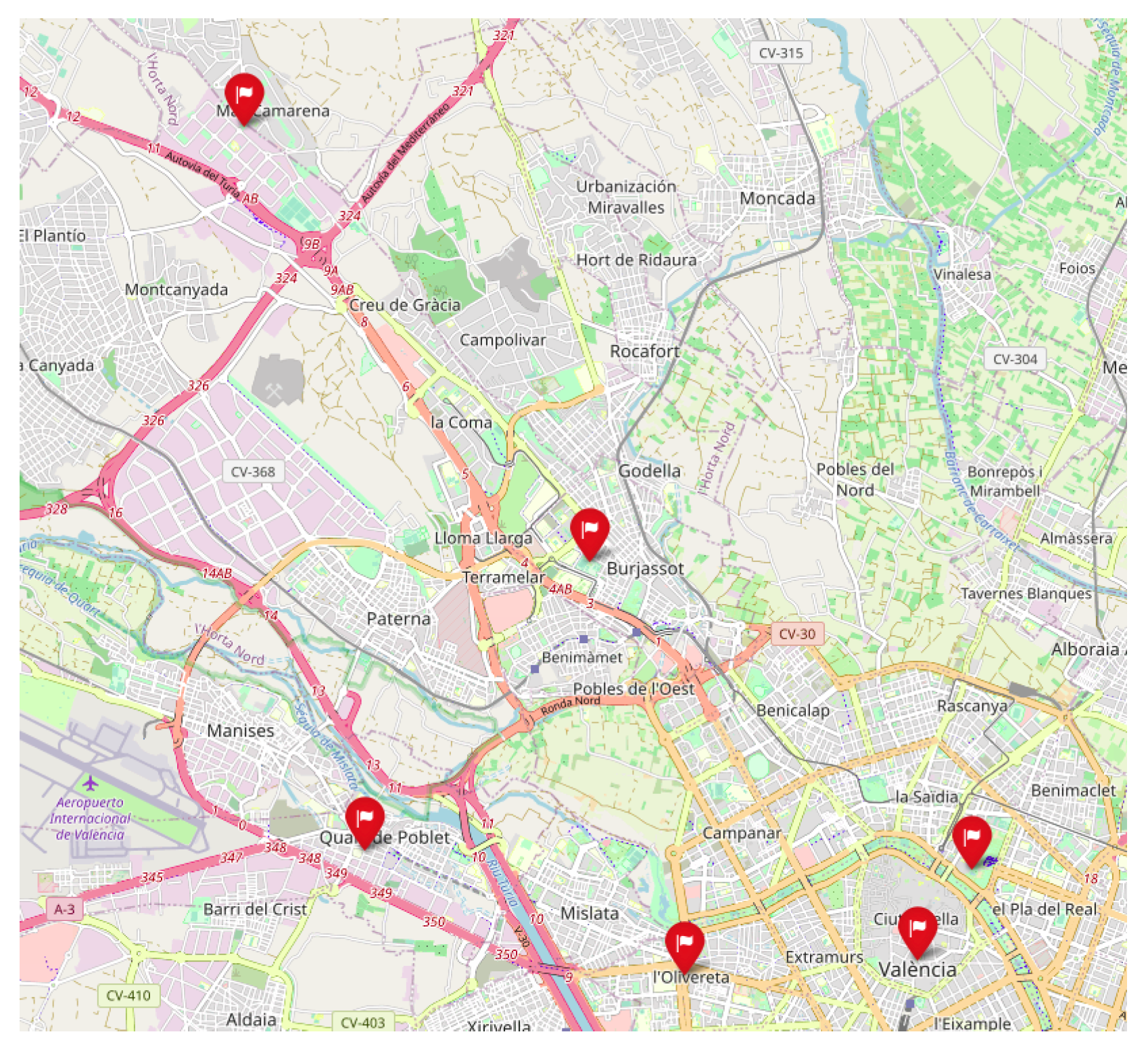
4.3. Mapping of Pollution over the Grid on the City
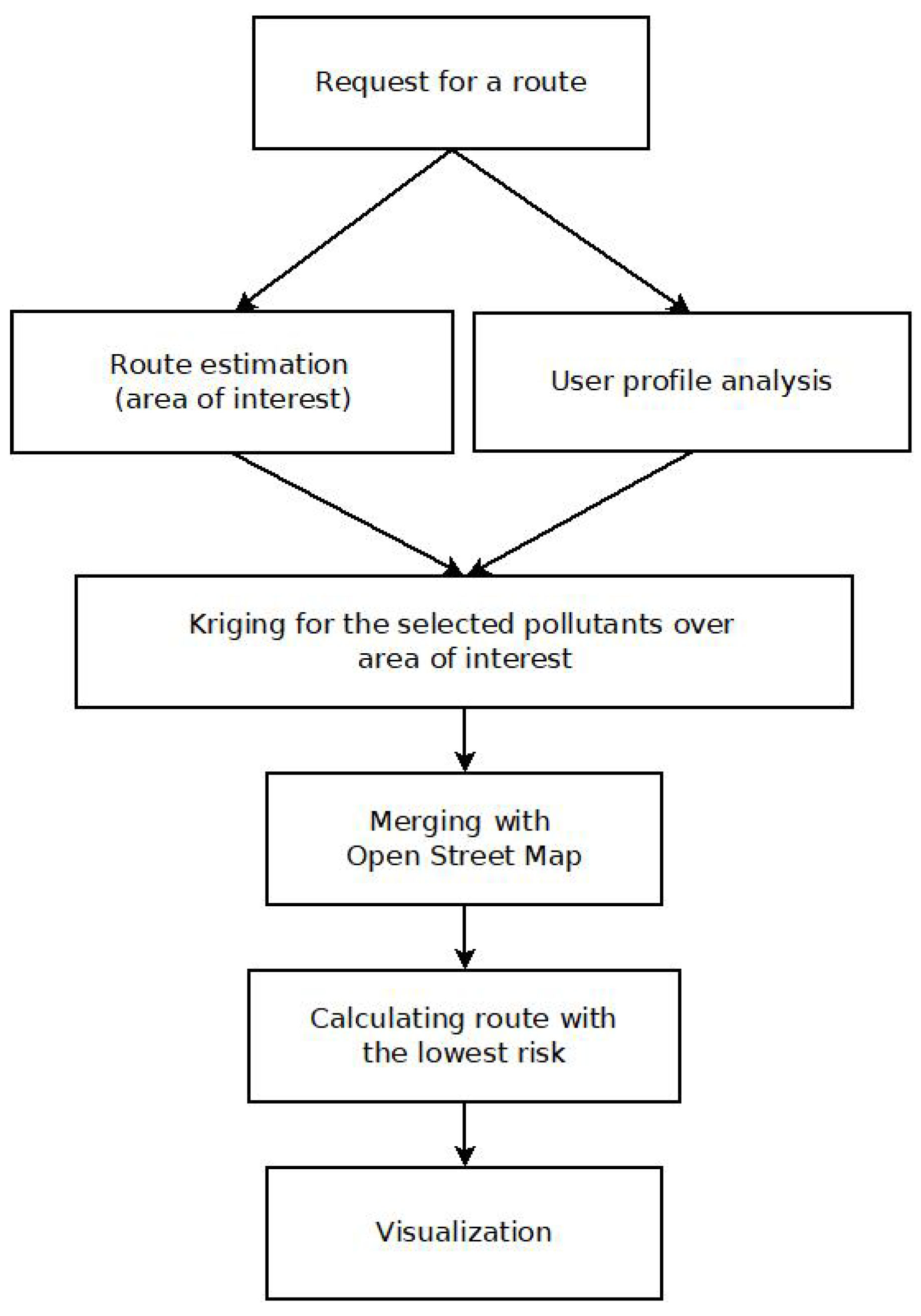
4.4. Healthy Route Planner
5. Results and Discussion
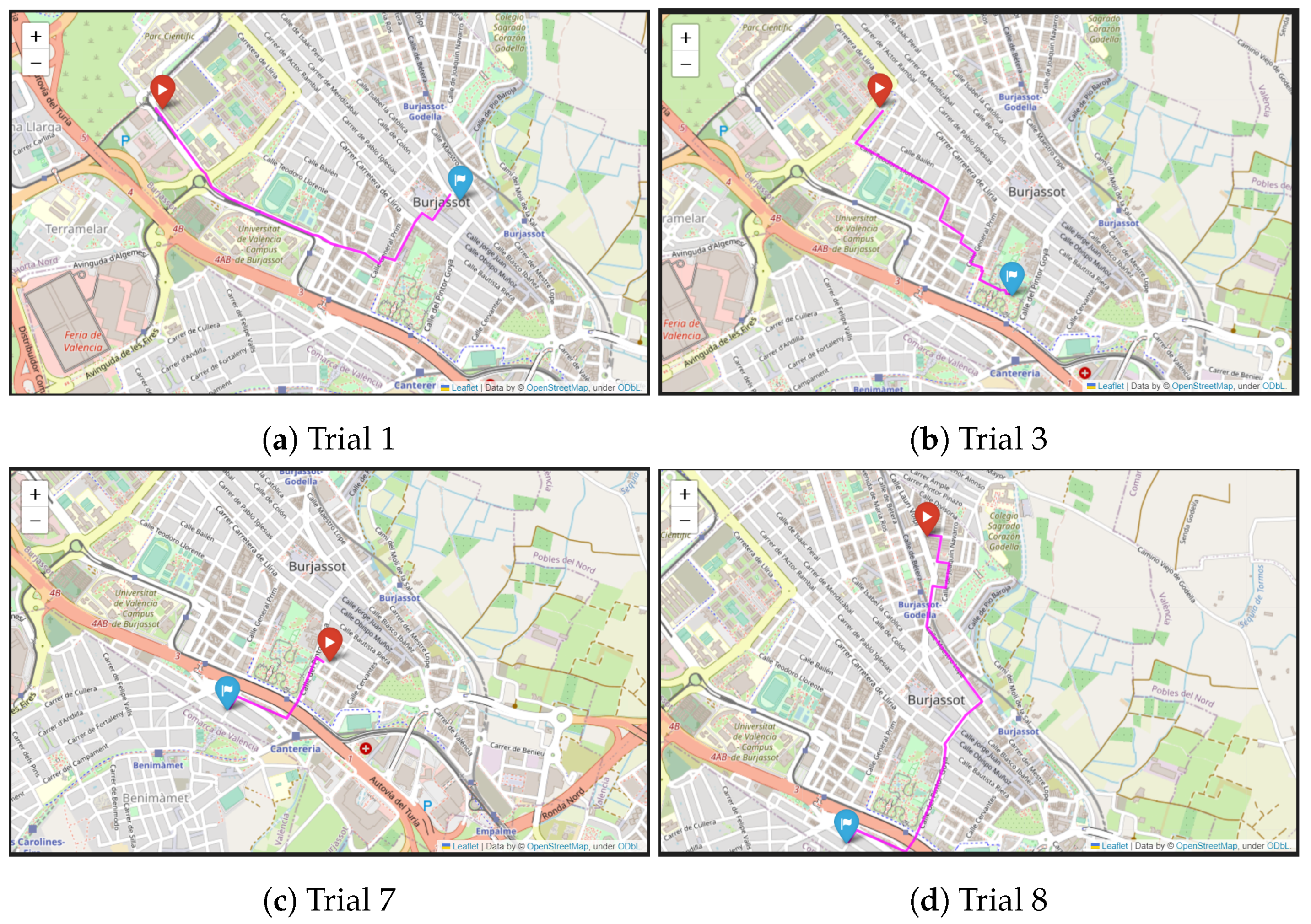
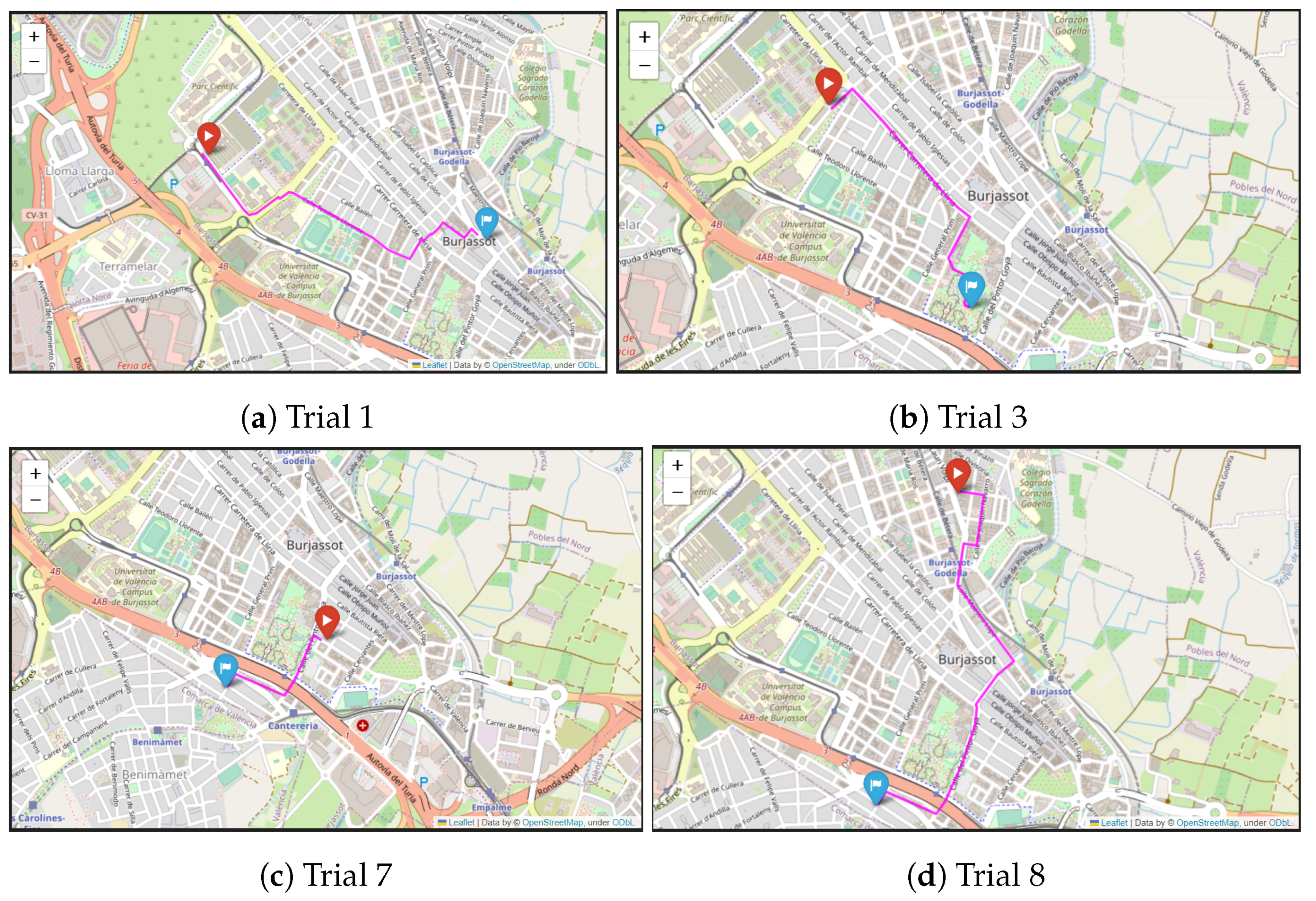
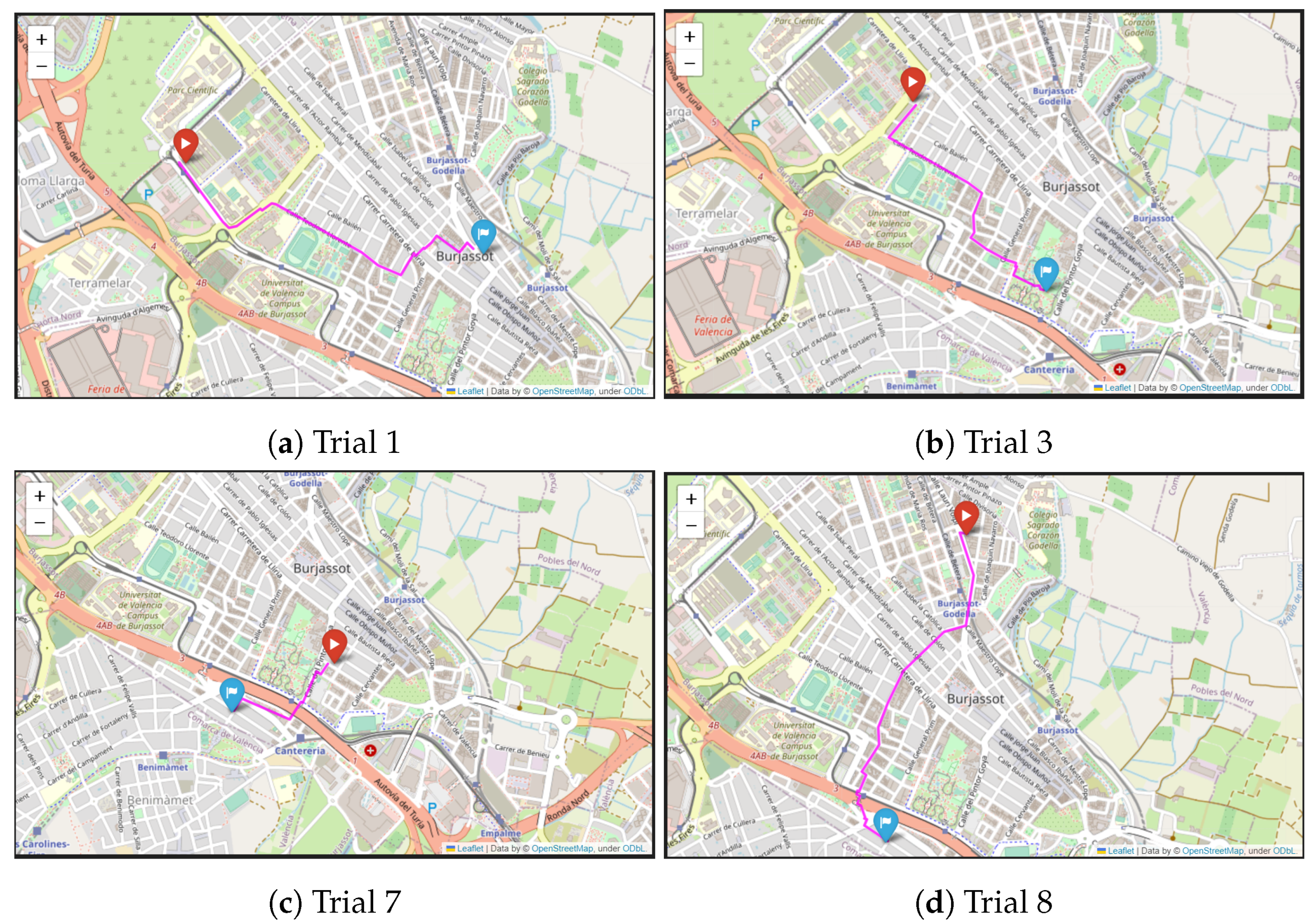
5.1. Analysis of the Healthy Route Planner with Different Scenarios
5.2. Statistical Analysis for the Different Scenarios
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Adair-Rohani, H. Air Pollution Responsible for 6.7 Million Deaths Every Year. 2023. Available online: https://www.who.int/teams/environment-climate-change-and-health/air-quality-and-health/health-impacts/types-of-pollutants (accessed on 27 February 2023).
- Eurostat: Statistics Explained. Respiratory Diseases Statistics. 2022. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Respiratory_diseases_statistics#Deaths_from_diseases_of_the_respiratory_system (accessed on 22 May 2023).
- BBC News. Air Pollution News. 2018. Available online: https://www.bbc.co.uk/news/world-europe-46017339 (accessed on 23 May 2023).
- Molinari, G.; Colombo, G.C.C. Respiratory allergies: A general overview of remedies, delivery systems, and the need to progress. Int. Sch. Res. Allergy 2014, 1, 1–16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- González-Díaz, S.; Arias-Cruz, A.; Macouzet-Sánchez, C.; Partida-Ortega, A. Impact of air pollution in respiratory allergic diseases. Med. Univ. 2016, 18, 212–215. [Google Scholar] [CrossRef]
- Zimmerman, N.; Presto, A.A.; Kumar, S.P.N.; Gu, J.; Hauryliuk, A.; Robinson, E.S.; Robinson, A.L.; Subramanian, R. A machine learning calibration model using random forests to improve sensor performance for lower-cost air quality monitoring. Atmos. Meas. Tech. 2018, 11, 291–313. [Google Scholar] [CrossRef] [Green Version]
- Yadav, K.; Arora, V.; Kumar, M.; Tripathi, S.N.; Motghare, V.M.; Rajput, K.A. Few-Shot Calibration of Low-Cost Air Pollution (PM2.5) Sensors Using Meta Learning. IEEE Sens. Lett. 2022, 6, 1–4. [Google Scholar] [CrossRef]
- ISO 11771:2010; Air Quality -Determination of Time-Averaged Mass Emissions and Emission Factors—General Approach. Technical Report; ISO: Geneva, Switzerland, 2010.
- ISO 37122:2019; Sustainable Cities and Communities—Indicators for Smart Cities. TC268 Sustainable Cities and Communities. Technical Report; ISO: Geneva, Switzerland, 2019.
- FAO. Directive 2008/50/EC of the European Parliament and of the Council of the European Parliament and of the Council of 21 May 2008 on Ambient Air Quality and Cleaner Air for Europe. Off. J. Eur. Commun. 2008, L 152, 1–44. [Google Scholar]
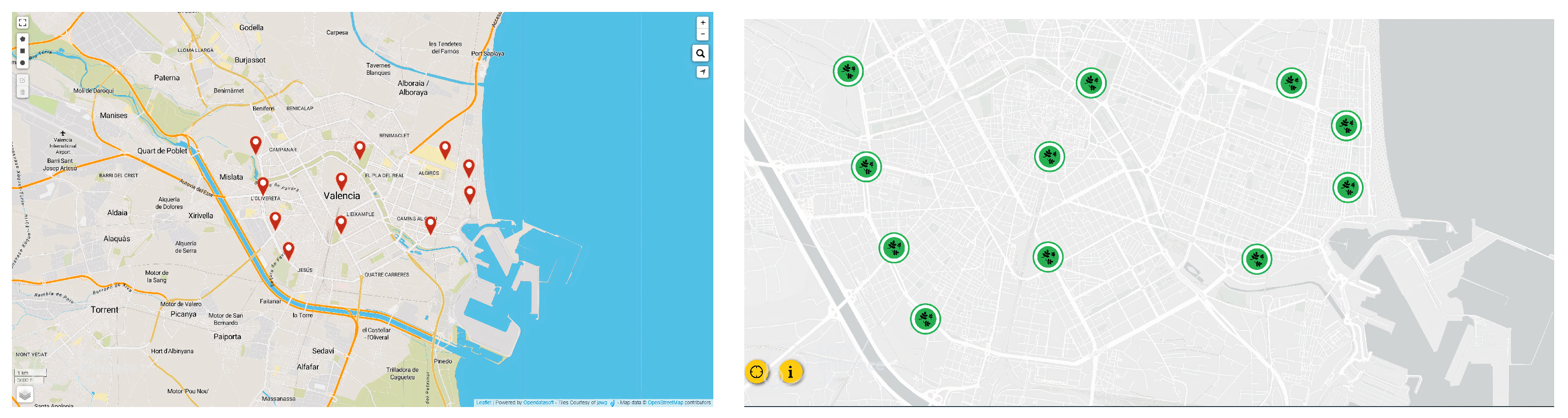
- Conselleria d’Agricultura, Desenvolupament Rural, Emergència Climàtica i Transició Ecològica. Red Valenciana de Vigilancia y Control de la Contaminación Atmosférica. 2023. Available online: https://agroambient.gva.es/va/web/calidad-ambiental/datos-on-line (accessed on 27 May 2023).
- Ajuntament de Valencia, Minut a Minut. Estaciones Contaminación Atmosféricas. 2023. Available online: https://valencia.opendatasoft.com/explore/dataset/estacions-contaminacio-atmosferiques-estaciones-contaminacion-atmosfericas/table/ (accessed on 21 May 2023).
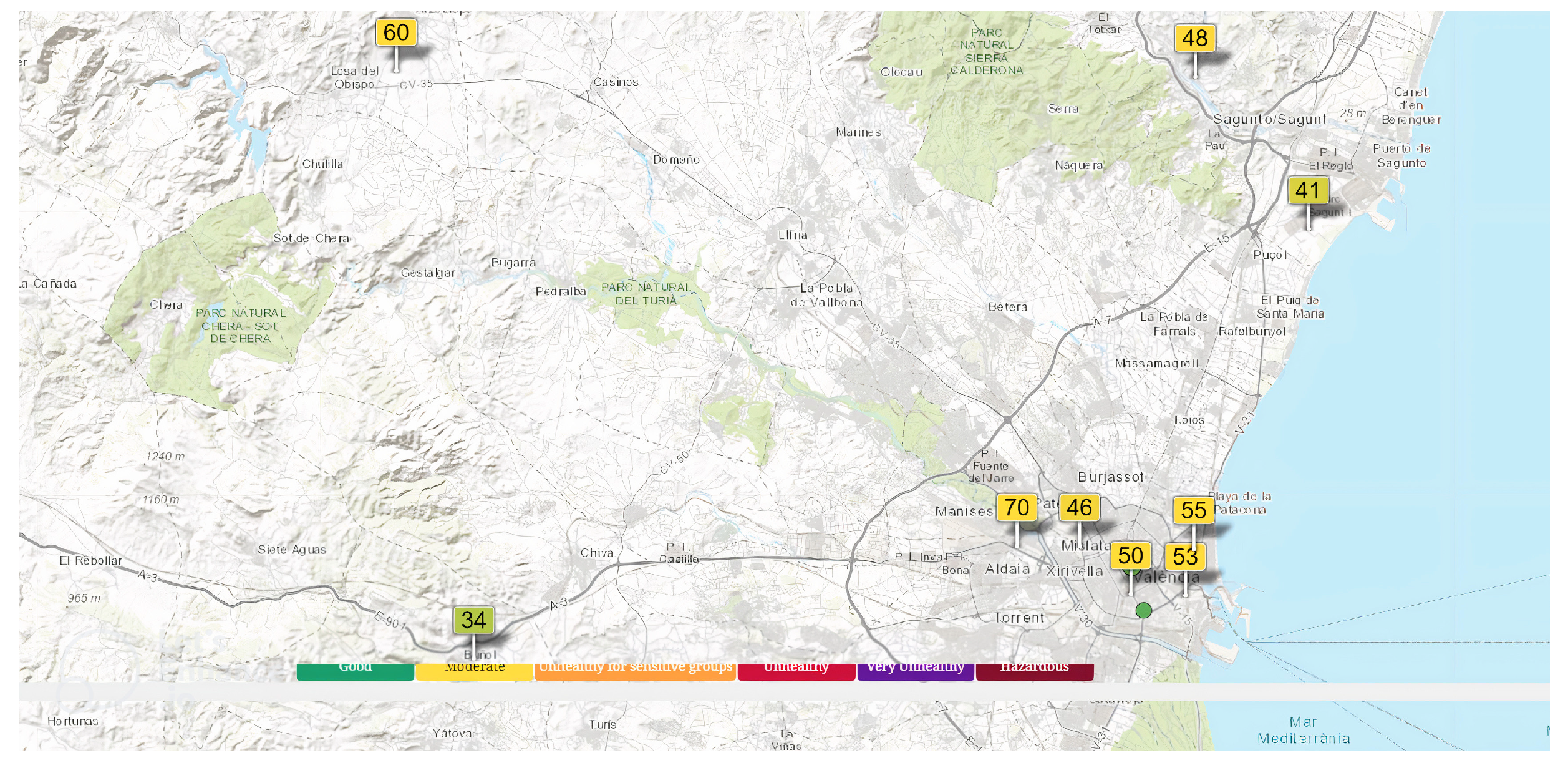
- aqicn.org Project. World Air Quality Index Project. 2023. Available online: https://aqicn.org/ (accessed on 27 February 2023).
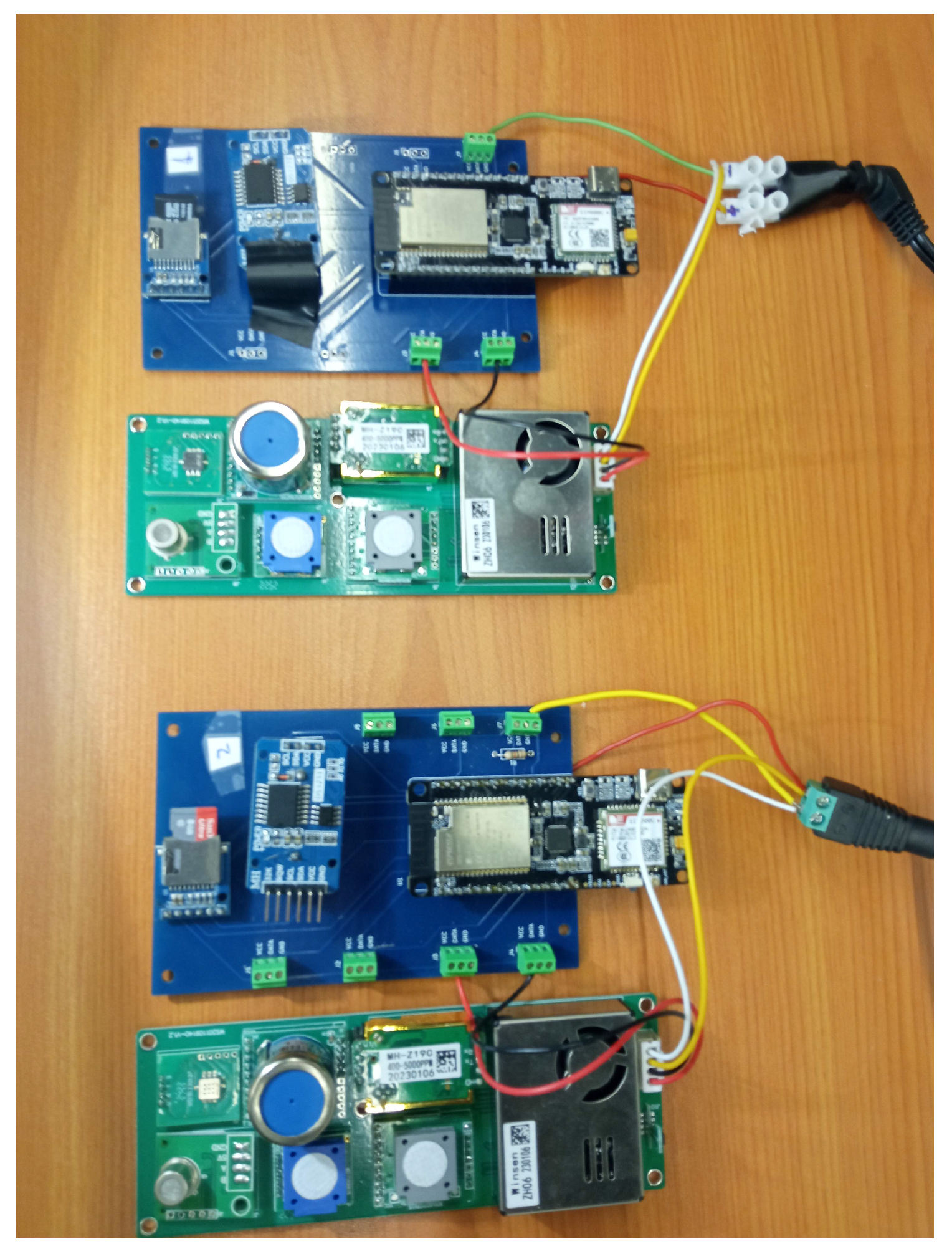
- Winsen, Ltd. Air Quality Sensor zphs01b. 2023. Available online: https://www.winsen-sensor.com/d/files/zphs01b-english-version1_1-20200713.pdf (accessed on 20 March 2023).
- Kunak Tech., Calidad del Aire Urbano: Información Ambiental y Parámetros meteorológicos en Entornos Urbanos. 2023. Available online: https://www.kunak.es/ (accessed on 28 February 2023).
- Oizom, Ltd. Accurate and Affordable Air Quality Monitoring Solutions. 2023. Available online: https://oizom.com (accessed on 28 February 2023).
- Nova Fitness Co., Ltd. Air Quality Sensor SDS011. 2023. Available online: https://cdn-reichelt.de/documents/datenblatt/X200/SDS011-DATASHEET.pdf (accessed on 27 April 2023).
- DecentLab, Ltd. Air Quality Sensor DL-LP8P. 2023. Available online: https://www.catsensors.com/media/Decentlab/Productos/Decentlab-DL-LP8P-datasheet.pdf (accessed on 27 April 2023).
- SGX, SensorTech. Air Quality Sensor MiCS-6814. 2023. Available online: https://www.sgxsensortech.com/content/uploads/2015/02/1143_Datasheet-MiCS-6814-rev-8.pdf (accessed on 21 May 2023).
- CEN, CEN/TS 17660-1 Air Quality—Performance Evaluation of air Quality Sensor Systems—Part 1: Gaseous Pollutants in Ambient Air. 2021. Available online: https://www.boutique.afnor.org/engb/standard/din-cen-ts-176601/air-quality-performance-evaluation-of-air-quality-sensor-systemspart-1-gas/eu174644/322334 (accessed on 2 August 2023).
- García, M.R.; Spinazzé, A.; Branco, P.T.; Borghi, F.; Villena, G.; Cattaneo, A.; Gilio, A.D.; Mihucz, V.G.; Álvarez, E.G.; Lopes, S.I.; et al. Review of low-cost sensors for indoor air quality: Features and applications. Appl. Spectrosc. Rev. 2022, 57, 747–779. [Google Scholar] [CrossRef]
- Rothkrantz, L. Multi parameter routing in air polluted urban areas. In Proceedings of the 2020 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Steeneveld, G.; Vreugdenhil, L.; van der Molen, M.; Ligtenberg, A. Towards a Healthy Urban Route Planner for cyclists and pedestrians in Amsterdam. In Proceedings of the Annual Meeting European Meteorological Society, Dublin, Ireland, 4–8 September 2017. EMS2017-305. [Google Scholar]
- RIVM Institute. Environmental Health Atlas—Explore and Discover Your Living Environment. 2023. Available online: https://www.atlasleefomgeving.nl/en (accessed on 27 May 2023).
- Alvear, O.; Zamora, W.; Calafate, C.T.; Cano, J.C.; Manzoni, P. EcoSensor: Monitoring environmental pollution using mobile sensors. In Proceedings of the 2016 IEEE 17th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Coimbra, Portugal, 21–24 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Khedo, K.; Rajiv, P.; Avinash, M. A Wireless Sensor Network Air Pollution Monitoring System. Int. J. Wirel. Mob. Netw. 2010, 2, 31–45. [Google Scholar] [CrossRef]
- Müller, S.; Voisard, A. Air Quality Adjusted Routing for Cyclists and Pedestrians. In Proceedings of the 1st ACM SIGSPATIAL International Workshop on the Use of GIS in Emergency Management (EM-GIS ’15), Bellevue, WA, USA, 3–6 November 2015; Association for Computing Machinery: New York, NY, USA, 2015. EM-GIS ’15. [Google Scholar] [CrossRef]
- Vamshi, B.; Prasad, R.V. Dynamic route planning framework for minimal air pollution exposure in urban road transportation systems. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 540–545. [Google Scholar] [CrossRef]
- Wang, C.; Li, C.; Qin, C.; Wang, W.; Li, X. Maximizing spatial–temporal coverage in mobile crowd-sensing based on public transports with predictable trajectory. Int. J. Distrib. Sens. Netw. 2018, 14, 1–10. [Google Scholar] [CrossRef]
- Wu, C.; Liu, Z.; Liu, F.; Yoshinaga, T.; Ji, Y.; Li, J. Collaborative Learning of Communication Routes in Edge-Enabled Multi-Access Vehicular Environment. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 1155–1165. [Google Scholar] [CrossRef]
- Google. Google Maps. 2023. Available online: https://google.maps/ (accessed on 27 February 2023).
- AntsRoute. The Solution for Planning Last-Mile Route of Field Workforce. 2023. Available online: https://antsroute.com/en (accessed on 27 February 2023).
- Here. Our Mission Is to Enable a Digital Representation of Reality to Radically Improve the Way the World Moves, Lives and Interacts. 2023. Available online: https://www.here.com/ (accessed on 27 February 2023).
- Espressif Systems. ESP32 System-on-Chip. 2023. Available online: https://www.espressif.com/en/products/socs/esp32 (accessed on 28 January 2023).
- Pycom.io. Fipy, Five Network Development Board for IoT. 2022. Available online: https://pycom.io/product/fipy/ (accessed on 28 December 2022).
- Kiesewetter, G.; Schoepp, W.; Heyes, C.; Amann, M. Modelling PM2.5 impact indicators in Europe: Health effects and legal compliance. Environ. Model. Softw. 2015, 74, 201–211. [Google Scholar] [CrossRef] [Green Version]
- Ubilla, C.; Yohannessen, K. Contaminación atmosférica efectos en la salud respiratoria en el niño. Rev. Méd. Clín. Condes 2017, 28, 111–118. [Google Scholar] [CrossRef]
- Orellano, P.; Quaranta, N.; Reynoso, J.; Balbi, B.; Vasquez, J. Effect of outdoor air pollution on asthma exacerbations in children and adults: Systematic review and multilevel meta-analysis. PLoS ONE 2017, 12, e0174050. [Google Scholar] [CrossRef] [PubMed]
- Vargas, S.; Onatra, W.; Osorno, L.; Páez, E.; Sáenz, O. Contaminación atmosférica y efectos respiratorios en niños, en mujeres embarazadas y en adultos mayores. Rev. UDCA Actual. Divulg. Científica 2008, 11, 31–45. [Google Scholar]
- Bienestar, O. La Exposición Al Dióxido de Nitrógeno Durante El Embarazo perjudica La Capacidad de Atención de los Niños. 2017. Available online: https://www.atresmedia.com/objetivo-bienestar/actualidad/exposicion-dioxido-nitrogeno-embarazo-perjudica-capacidad-atencion-ninos_20170803598433970cf2c0f4136d712c.html (accessed on 15 June 2023).
- ISGlobal. La Exposición a la Contaminación Atmosférica Durante el Embarazo También Perjudica a la Capacidad de Atención en la Infancia. 2017. Available online: http://bit.ly/exposicion-a-contaminacion-atmosferica-durante-embarazo (accessed on 15 June 2023).
- Isaaks, E.H.; Srivastava, R.M. An Introduction to Applied Geostatistics; Oxford University Press: New York, NY, USA, 1989. [Google Scholar]
- Cressie, N. Statistics for Spatial Data; John Wiley: New York, NY, USA, 1993. [Google Scholar]
- OSM Contributors. Open Street Map. 2023. Available online: https://www.openstreetmap.org/ (accessed on 27 May 2023).
- Boeing, G. OSMnx: New methods for acquiring, constructing, analyzing, and visualizing complex street networks. Comput. Environ. Urban Syst. 2017, 65, 126–139. [Google Scholar] [CrossRef] [Green Version]
- Segura-Garcia, J.; Calero, J.M.A.; Pastor-Aparicio, A.; Marco-Alaez, R.; Felici-Castell, S.; Wang, Q. 5G IoT System for Real-Time Psycho-Acoustic Soundscape Monitoring in Smart Cities With Dynamic Computational Offloading to the Edge. IEEE Internet Things J. 2021, 8, 12467–12475. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
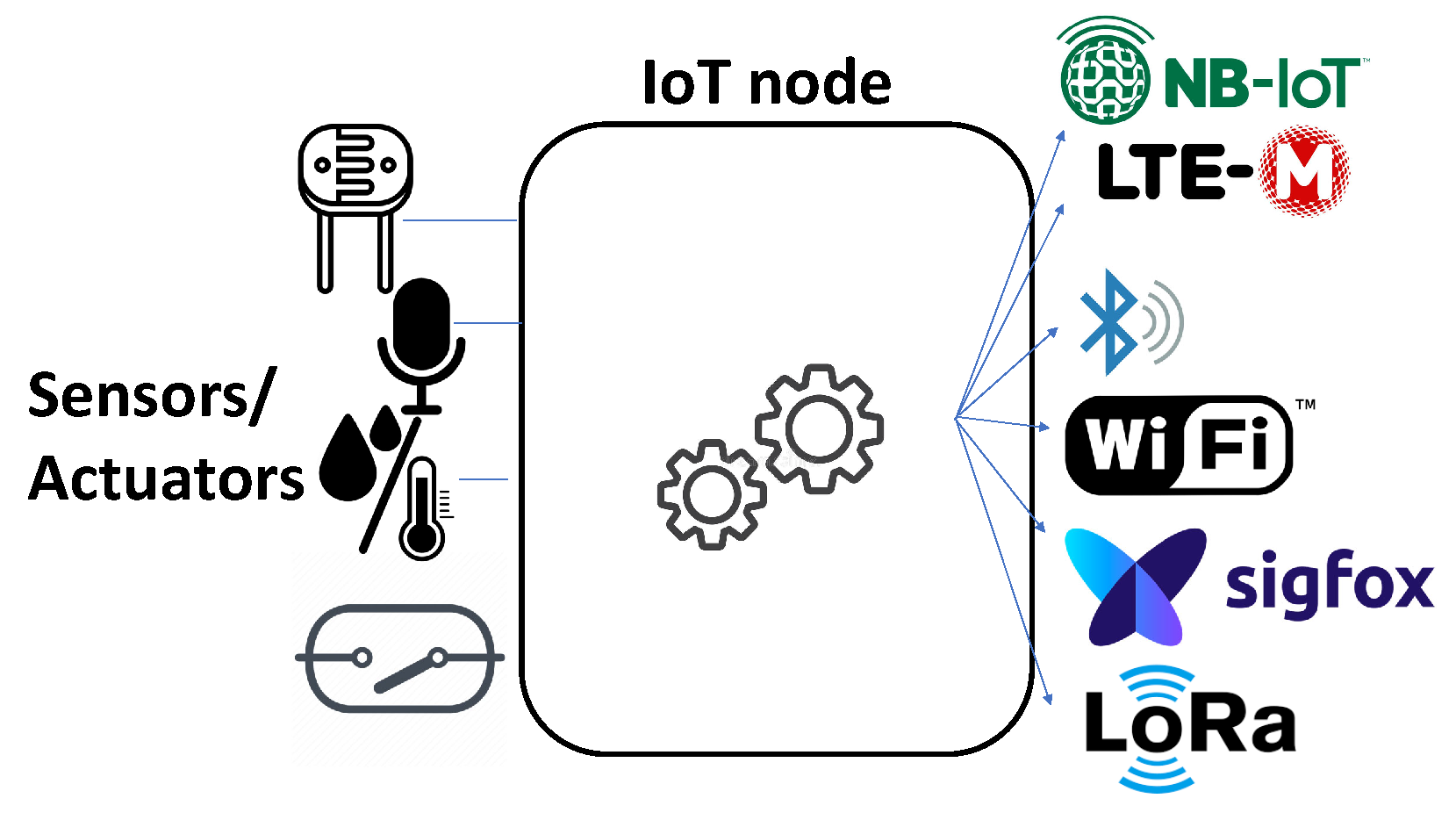
| Module | Gas Sensors | Connection Type |
|---|---|---|
| SDS011 [17] | PM, T, HR, PA | UART |
| DL-LP8P [18] | , T, HR, PA | LoRAWAN |
| MiCS-6814 [19] | , , , , | I2C, SPI |
| ZPHS01B [14] | , , , , TVOC, T, HR | UART |
| Trial | Src. | Dto. | DD | HH | C. Asthma | D. Asthma | C. Preg. | D. Preg. | C. SPF Asthma | C. SPF Preg. | D. SPF |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | ETSE | Oficina de correos de Burjassot | Friday 16 June 2023 | 10:13 | 42,848.7 | 1728.1 | 17,927.14 | 1671.05 | 43,609.68 | 17,927.14 | 1671.05 |
| 2 | ETSE | Residencia micampus Burjassot | Friday 16 June 2023 | 12:21 | 28,349.79 | 816.02 | 7679.55 | 816.02 | 28,349.79 | 7679.55 | 816.02 |
| 3 | Residencia micampus Burjassot | Parque de la Granja | Friday 16 June 2023 | 19:32 | 46,232.2 | 1295.79 | 9822.41 | 1279.08 | 47,273.17 | 10,000.21 | 1278.33 |
| 4 | C/Vista Alegre 2 | Polideportivo de Burjassot | Saturday 17 June 2023 | 9:21 | 432.97 | 850.25 | 191.17 | 850.25 | 492.98 | 216.3 | 740.34 |
| 5 | C/Vista Alegre 2 | Hospital IMED | Saturday 17 June 2023 | 20:47 | 1290.39 | 2385.04 | 322.92 | 2385.04 | 1716.59 | 424.17 | 2124.88 |
| 6 | C/Maestro Giner 32 | Restaurante Colonial buffet | Sunday 18 June 2023 | 14:09 | 954.03 | 1215.45 | 323.4 | 1178.19 | 1058.74 | 361.32 | 1134.74 |
| 7 | C/Maestro Giner 32 | Restaurante Quitin | Sunday 18 June 2023 | 14:28 | 413.58 | 640.03 | 86.99 | 640.03 | 524.55 | 111.02 | 627.55 |
| 8 | C/Vista Alegre 2 | Restaurante Quitin | Sunday 18 June 2023 | 14:31 | 1161.19 | 1996.87 | 249.01 | 1997.02 | 1502.93 | 327.74 | 1702.75 |
| 9 | C/Vista Alegre 2 | ETSE | Monday 19 June 2023 | 10:35 | 415.82 | 2281.57 | 893.67 | 2281.57 | 778.73 | 1675.34 | 1648.43 |
| 10 | ETSE | Residencia micampus Burjassot | Friday 16 June 2023 | 12:21 | 28,349.79 | 816.02 | 7679.55 | 816.02 | 28,349.79 | 7679.55 | 816.02 |
| 11 | ETSE | C/Maestro Giner 32 | Monday 19 June 2023 | 14:31 | 546.89 | 1928.15 | 156.95 | 1928.15 | 624.33 | 175.94 | 1928.15 |
| 12 | C/Vista Alegre 2 | Consum 1 | Wednesday 21 June 2023 | 9:32 | 433.32 | 850.26 | 139.79 | 850.41 | 493.63 | 157.11 | 740.34 |
| 13 | C/Vista Alegre 2 | Consum 2 | Wednesday 21 June 2023 | 9:41 | 513.38 | 663.54 | 159.03 | 923.98 | 671.82 | 159.03 | 575.77 |
| 14 | C/Vista Alegre 2 | Mercadona | Wednesday 21 June 2023 | 9:47 | 341.57 | 473.96 | 104.97 | 494.65 | 501.38 | 144.4 | 470.17 |
| 15 | C/Lauri Volpi 12 | Druni | Wednesday 21 June 2023 | 11:08 | 522.42 | 867.41 | 154.86 | 867.41 | 589.62 | 168.88 | 793.06 |
| 16 | C/Lauri Volpi 15 | Mercadona | Wednesday 21 June 2023 | 12:47 | 412.1 | 379.06 | 110.94 | 420.58 | 541.36 | 134.31 | 351.59 |
| 17 | C/Vista Alegre 2 | Mercadona | Thursday 22 June 2023 | 12:32 | 376.14 | 473.8 | 97.69 | 473.96 | 570.79 | 134.76 | 470.17 |
| 18 | Parada Burjassot-Godella | Centro de salud | Thursday 22 June 2023 | 12:48 | 811.98 | 1380.04 | 196.48 | 1503.31 | 961.48 | 233.37 | 1273.13 |
| 19 | C/Vista Alegre 2 | Parque de la granja | Sunday 25 June 2023 | 17:19 | 373.1 | 528.61 | 65.95 | 528.77 | 551.04 | 96 | 502.75 |
| 20 | C/Maestro Giner 32 | Mercado | Monday 26 June 2023 | 11:46 | 291.5 | 666.91 | 69.12 | 666.91 | 381.59 | 90.15 | 653.92 |
| Trial | % PR with Asthma | % ID with Asthma | % PR with Pregnancy | % ID with Pregnancy |
|---|---|---|---|---|
| 1 | 1.75% | 3.3% | 0% | 0% |
| 2 | 0% | 0% | 0% | 0% |
| 3 | 2.20% | 1.35% | 1.78% | 0.06% |
| 4 | 12.17% | 12.93% | 11.62% | 12.93% |
| 5 | 24.83% | 10.91% | 23.87% | 10.91% |
| 6 | 9.89% | 6.64% | 10.49% | 3.69% |
| 7 | 21.15% | 1.95% | 21.65% | 1.95% |
| 8 | 22.74% | 14.73% | 24.02% | 14.74% |
| 9 | 46.6% | 27.75% | 46.66% | 27.75% |
| 10 | 12.15% | 24.13% | 6.39% | 24.13% |
| 11 | 12.4% | 15.25% | 10.8% | 15.25% |
| 12 | 12.22% | 12.93% | 11.03% | 12.94% |
| 13 | 23.58% | 13.23% | 18.6% | 37.68% |
| 14 | 31.84% | 0.8% | 27.32% | 4.95% |
| 15 | 11.4% | 8.57% | 8.3% | 8.57% |
| 16 | 23.88% | 7.25% | 17.4% | 16.4% |
| 17 | 34.1% | 0.77% | 27.51% | 0.8% |
| 18 | 15.55% | 7.75% | 15.81% | 15.31% |
| 19 | 32.29% | 4.89% | 31.31% | 4.92% |
| 20 | 23.61% | 1.95% | 23.33% | 1.95% |
| Avg. | 18.72% | 9.27% | 16.91% | 10.32% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fayos-Jordan, R.; Araiz-Chapa, R.; Felici-Castell, S.; Segura-Garcia, J.; Perez-Solano, J.J.; Alcaraz-Calero, J.M. ECO4RUPA: 5G-IoT Inclusive and Intelligent Routing Ecosystem with Low-Cost Air Quality Monitoring. Information 2023, 14, 445. https://doi.org/10.3390/info14080445
Fayos-Jordan R, Araiz-Chapa R, Felici-Castell S, Segura-Garcia J, Perez-Solano JJ, Alcaraz-Calero JM. ECO4RUPA: 5G-IoT Inclusive and Intelligent Routing Ecosystem with Low-Cost Air Quality Monitoring. Information. 2023; 14(8):445. https://doi.org/10.3390/info14080445
Chicago/Turabian StyleFayos-Jordan, Rafael, Raquel Araiz-Chapa, Santiago Felici-Castell, Jaume Segura-Garcia, Juan J. Perez-Solano, and Jose M. Alcaraz-Calero. 2023. "ECO4RUPA: 5G-IoT Inclusive and Intelligent Routing Ecosystem with Low-Cost Air Quality Monitoring" Information 14, no. 8: 445. https://doi.org/10.3390/info14080445